Embed Size (px)
Citation preview

Research ArticleA Biologically Inspired Framework for the IntelligentControl of Mechatronic Systems and Its Application toa Micro Diving Agent
Wallace M Bessa 1 Gerrit Brinkmann 2 Daniel A Duecker 2
Edwin Kreuzer2 and Eugen Solowjow3
1RoboTeAM Robotics amp Machine Learning Federal University of Rio Grande do Norte NatalRN Brazil2Institute of Mechanics and Ocean Engineering Hamburg University of Technology Hamburg Germany3Siemens Corporate Technology 1936 University Avenue Berkeley CA 94704 USA
Correspondence should be addressed to Wallace M Bessa wmbessactufrnbr
Received 16 September 2018 Accepted 26 November 2018 Published 30 December 2018
Academic Editor Jorge Rivera
Copyright copy 2018 Wallace M Bessa et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Mechatronic systems are becoming an intrinsic part of our daily life and the adopted control approach in turn plays an essential rolein the emulation of the intelligent behavior In this paper a framework for the development of intelligent controllers is proposedWe highlight that robustness prediction adaptation and learning which may be considered the most fundamental traits ofall intelligent biological systems should be taken into account within the project of the control scheme Hence the proposedframework is based on the fusion of a nonlinear control scheme with computational intelligence and also allows mechatronicsystems to be able tomake reasonable predictions about its dynamic behavior adapt itself to changes in the plant learn by interactingwith the environment and be robust to both structured and unstructured uncertainties In order to illustrate the implementationof the control law within the proposed framework a new intelligent depth controller is designed for a microdiving agent On thisbasis sliding mode control is combined with an adaptive neural network to provide the basic intelligent features Online learningby minimizing a composite error signal instead of supervised off-line training is adopted to update the weight vector of the neuralnetworkThe boundedness and convergence properties of all closed-loop signals are proved using a Lyapunov-like stability analysisNumerical simulations and experimental results obtained with the microdiving agent demonstrate the efficacy of the proposedapproach and its suitableness for both stabilization and trajectory tracking problems
1 Introduction
In the last few years we have witnessed the emergence ofautonomous and intelligentmechatronic systems Householdrobots such as automated vacuumcleaners and lawnmowersas well as delivery drones and self-driving cars just toname a few are examples of the way intelligent devices areentering our lives Unlike industrial robots which operate ina well-structured environment and perform repetitive tasksautonomous systems have to cope with a high level of uncer-tainties and adjust their behavior according to both internaland external changes Thus although conventional controlschemes have been successfully employed to a large variety
of robotic manipulators and other industrial applicationsthey might not represent the most proper choice to deal withmechatronic systems subject to drastic changes in operatingconditions On the other hand because of their ability toundertake assignments in an environment of uncertainty andimperfect information soft computing techniques such asfuzzy logic and artificial neural networks are commonly usedwhen highly uncertain plants are to be considered [1]
Assuming that intelligent control may be understood asa combination of modern control theory with computationalintelligence [2 3] many authors have adopted this approachto propose their control schemes Boukens and Boukabou[4] for example associated an optimal controller with an
HindawiMathematical Problems in EngineeringVolume 2018 Article ID 9648126 16 pageshttpsdoiorg10115520189648126
2 Mathematical Problems in Engineering
adaptive neural network to solve the trajectory trackingproblem of a mobile robot subject to external disturbancesunmodeled dynamics and nonholonomic constraints In [5]a gain scheduling PID controller optimized by a geneticalgorithm is designed for an unmannedmarine surface vesselLu et al [6] combined an interval type 2 fuzzy neural networkwith a proportional-derivative controller and applied theresulting scheme to a Delta parallel robot By means of theLyapunov stability theory Mai and Commuri [7] proposed arobust neural network controller for a prosthetic ankle jointwith gait recognition Radial basis function (RBF) neuralnetwork is adopted in [8] in order to design a reinforcementlearning based adaptive nonlinear optimal controller for anair-breathing hypersonic flight vehicle In [9] adaptive neuralnetworks are also considered for the reinforcement learning-based control of wheeled mobile robots A neural-network-based online near-optimal controller for overhead cranes isobtained in [10] by solving the corresponding Hamilton-Jacobi-Bellman equation Using a network model to mimicthose brain structures related to emotions Lucas et al [11]presented the so-called Brain Emotional Learning BasedIntelligent Controller (BELBIC) This approach was latergeneralized in [12] by choosing a nonlinear learning modulewith universal approximation features
As a result of the essentially nonlinear nature of almostall mechatronic systems nonlinear control methods havebeen frequentlymerged with soft computing approachesTherecursive structure of backstepping for instance representsa mighty feature that has been exploited in the developmentof intelligent controllers In [13] RBF neural networks areadopted as disturbance observers in a backstepping basedapproach to handle with a class of strict-feedback nonlinearsystems subject to modeling imprecisions and input nonlin-earities Lin et al [14] used neural networks and a tuningfunction-based adaptive technique to propose an adaptivebackstepping fault-tolerant control algorithm Gao et al[15] dealt with fault tolerant-control using neural networksand backstepping too but in their case the controller issuitable for multiple-input and multiple-output (MIMO)systems In [16] a neural-network-based adaptive backstep-ping controller is presented for a class of strict-feedbacknonlinear state constrained systems subject to input delayThe control of nonaffine nonlinear systems with time-delaysis in turn tackled with neural networks in a backsteppingway by Wang et al [17] By combining backstepping with aneural approximator Si et al [18] developed a robust controlscheme to cope with nonlinear systems with stochasticdisturbances and unknown hysteresis input Li et al [19]on the other hand proposed an adaptive fuzzy controllerbased on backstepping technique to deal with nonlinearstrict-feedback systems subject to input delay and outputconstraint By using small-gain approaches Zhang et al[20] and Su et al [21] designed adaptive fuzzy backstep-ping schemes for uncertain nonlinear systems Moreovermany other neural and fuzzy backstepping controllers havebeen recently employed in a variety of applications rangingfrom robotic manipulators [22ndash24] to spacecrafts [25ndash27]However although promising alternatives have already beenproposed [28 29] the explosion of complexity which is an
inherent issue in backstepping still poses some difficulties forthe implementation of control schemes based on thismethod
Dynamic surface control (DSC) emerged as an appealingalternative to overcome the problems related to the explosionof terms Nevertheless DSC may lead to instabilities in theclosed-loop system if the designed controller cannot properlycope withmodel uncertainty or external disturbances [30] Inorder to surmount this handicap intelligent approximatorscan be designed to compensate for modeling inaccuracieswithin DSC based schemes In [31] dynamic surface controlis combined with a radial basis function neural network andapplied to a single link manipulator with a flexible jointXu and Sun [32] used fuzzy logic to design an intelligentapproximator within a dynamic surface based controllerDynamic surface control has been also combined with otherneural networks based schemes [33ndash36] and with fuzzyinference systems [37ndash40]
Because of its familiarity with the computed torquetechnique the robotics community has commonly adoptedfeedback linearizationmethod together with machine intelli-gence By using intelligent algorithms the major drawback offeedback linearization namely the requirement of a preciseplant model can be overcome Modeling imprecisions anddisturbances lead to a significant increase in tracking errorwhen feedback linearization is applied without a compensa-tion scheme [41]Hence neural networks [42ndash48] fuzzy logic[49ndash52] and evolutionary computation [53ndash55] for instancehave been used to surpass this limitation and to improvecontrol performance
The fusion of sliding mode control (SMC) and softcomputing is considered a powerful approach to deal withhighly uncertain nonlinear systems [56] Sliding mode con-trollers can successfully handle bounded uncertainties [57]but the utilization of discontinuous relays may lead toundesirable chattering effects [41] Even though a properlydesigned boundary layer has the capacity to completelyeliminate chattering the adoption of this strategy usuallyresults in an inferior tracking performance [58] In this casecomputational intelligence might be used to overcome theshortcomings of smooth sliding controllers [59] As demon-strated by Bessa and Barreto [60] adaptive fuzzy inferencesystems for example can be properly embedded within theboundary layer to compensate for modeling imprecisionsfor the purpose of enhancing the overall control efficiencyThis procedure has already been successfully applied tothe dynamic positioning of underwater vehicles [61 62]vibration suppression in smart structures [63] tracking ofunstable periodic orbits in a chaotic pendulum [64] and thecontrol of electrohydraulic servosystems [65]
Considering that artificial neural networks can performuniversal approximation [66] neural based schemes havebeen also merged with sliding mode controllers for thecompensation of modeling inaccuracies In [67] Azzaro andVeiga proposed a sliding mode controller for nonlinear sys-tems with unknown dynamics By means of the Levenberg-Marquardt algorithm a neural network was trained toidentify the plant dynamics Fei and Lu [68] presented anadaptive sliding mode controller with a neural estimator anda fractional order sliding manifold RBF neural networks and
Mathematical Problems in Engineering 3
a fractional term in the sliding surface are used to improve thecontrol performance In [69] a double loop recurrent neuralnetwork is adopted to approximate unknown plant dynamicswithin a sliding mode controller Zhang et al [70] combinedintegral slidingmodes with a critic neural network to proposean optimal guaranteed cost control scheme for constrained-input nonlinear systems with matched and unmatched dis-turbances Yu and Kaynak addressed the integration of SMCwith some other soft computing techniques in [56] anddiscussed further aspects and new trends about this approachin [59]
Although it might be the dominant paradigm in theaforementioned works could the mere fusion of computa-tional intelligence with modern control theory be enoughto define the resulting control scheme as intelligent Wouldan autonomous mechatronic system equipped with such acontroller be considered an intelligent agent The answersto these questions rely on our understanding of what intelli-gencemeans Moreover as we show in this paper the sense ofwhat defines intelligence can provide a clear path to delineatethe scope of intelligent control
In this work supported by the most common definitionsof natural intelligence we propose a framework for the intelli-gent control of mechatronic agents The intelligent controllershould thereby be able to make reasonable predictions aboutthe expected dynamic behavior of the system adapt itself tochanges in the plant and in the environment learn by experi-ence and by interacting with the environment and be robustto modeling imprecisions and unexpected perturbations Inorder to comply with these four requirements an adaptiveneural network is embedded within the boundary layer ofa smooth sliding mode controller Although several otherapproaches would be possible within the proposed frame-work we think that the adopted strategy has some valuablefeatures which are discussed below Bymeans of a Lyapunov-like stability analysis rigorous proofs for the boundednessand convergence properties of the closed-loop signals areprovidedThe proposed approach is applied to the intelligentdepth control of a microdiving agent Both numerical andexperimental results obtained with the microdiving agentdemonstrate the efficacy of the proposed approach and itssuitableness for both stabilization and trajectory trackingproblems
The following advantages of the proposed strategy canalready be anticipated (i) robustness to both modelinginaccuracies and external disturbances (ii) the ability toincorporate prior knowledge of the plant and also to learnby interacting with the environment (iii) the adoption ofonline learning by minimizing a composite error signalinstead of supervised off-line training (iv) it does not sufferfrom the curse of dimensionality since the proposed neuralnetwork architecture requires only one neuron in the inputlayer instead of all system states or state errors The last twofeatures not only simplify the design process and the resultingcontrol law but also minimize the required computationaleffort As a matter of fact the adoption of only one neuronin the input layer allows the computational complexity of theneural network to be exponentially reduced Moreover theseattributes enable the proposed intelligent controller to be light
enough to be employed inmechatronic systems with reducedcomputational power
Moreover it should be highlighted that the intelligentscheme discussed here introduces a significant improvementover our recently proposed schemewhich has been presentedin [49] By merging sliding mode control with artificial neu-ral networks the new intelligent depth controller providesrobustness and enhances the learning capacities of the divingagent
The rest of the paper is organized as follows The usualconcepts of intelligence and their respective adoption as thebasis of a framework for intelligent control are addressedin Section 2 This discussion guides the design of a newintelligent controller for amicrodiving agent in Section 3Theperformance of the proposed intelligent scheme is evaluatedin Section 4 by means of numerical and experimental resultsFinally the concluding remarks are presented in Section 5
2 A Framework for Intelligent Control
The relevance of control theory to the investigation ofcomplex biological phenomena especially those related tothe nervous system and to natural self-regulating processeswas highlighted seventy years ago in the seminal work byNorbert Wiener [71] The cybernetic approach proposedby Wiener which turned out to be very fruitful to bothbiological and engineering sciences reinforced the benefitsof interdisciplinary research Motivated by this perspectivein this section we outline the essential requirements for anintelligent controller based on concepts derived from areassuch as neuroscience and psychology
21 What Is Intelligence Before starting to discuss the mostcommon definitions it should be clear that here we arereferring to intelligence in a strict sense In fact what weusually consider intelligent depends on our expectationsalthough ordinary people know how to play chess a babywith the same skill would be considered a genius a dog evenif it could only understand the rules of the game would benothing short of a miracle [72] Hence our focus lies on themost fundamental traits of intelligent behavior
In order to delineate the strict meaning of the termpsychologists and neuroscientists have been trying to findthe very essence of intelligence since the beginning of thetwentieth century According to Alfred Binet and TheodoreSimon the fathers of the IQ Test intelligence representsthe faculty of adapting oneself to new circumstances [73]Thereafter many researchers endorsed that adaptation is acore feature of intelligence [74] Nevertheless it should benoted that purely adaptive behavior seems to be not enoughto distinguish an intelligent agent Otherwise even bacteriawhich have the ability to adapt themselves to the environment[75] could be characterized as intelligent organisms Anagent equipped solely with the adaptation attribute has toadapt itself to each change in its environment even if thischange represents the return to a previously experiencedcondition We expect however that an intelligent agentshould be able to recognize an already experienced state and
4 Mathematical Problems in Engineering
thus act accordingly without any readaptation Such behaviorclearly suggests the need for memory and the ability to learn
According to Dawkins [76] the emergence of memory inliving beings represented a great advance inasmuch as theirbehavior could now be influenced not only by the immediatepast but also by events in the distant past
The psychologist Walter Dearborn has soon realized thatthe capacity to learn and to profit by experience representsa key aspect of intelligence [77] Donald Hebb whose workhad an enormous influence on the field of artificial neuralnetworks has also highlighted the importance of learning[78] As a matter of fact Hebbian theory is the basis ofone of the oldest and most important learning rules inneural networks Nowadays there is no doubt that learningis essential for all intelligent beings and it usually occursthroughout their entire lifetime This process involves thecontinuous assimilation of new information followed by theunceasing accommodation of the knowledge basis due toinformation arrival
More recently neuroscientists begun to draw attention toanother essential trait of intelligence the capacity to predictWolpert [79] argued that humans and animals in order toproperly activate their muscles and limbs develop an internalmodel of their own motor systems and of their environmentas well This internal model is constantly updated by sensoryfeedback and is used by the central nervous system (CNS) topredict the consequences of its control actions [80] Edwardset al [81] propose that the brain creates internal models of theenvironment to predict imminent sensory input Llinas [82]emphasized that prediction is the prime objective of the brainand is imperative for intelligent motricity In [83] Llinas andRoy suggested that the CNS has evolved for the purpose ofpredicting the outcomes of the impendingmotionMoreoversince prediction in this case should be unique the authorsalso claim that this feature may have led to the emergence ofself-awareness in complex living beings
Another well-known property of biological systems isrobustness [84] Robust organisms are able to keep theirfunctions even in the case of unexpected perturbationsand under diverse environmental conditions According toKitano [85] since robustness favors evolvability robust traitsare usually selected by evolution In addition these naturallyselected strategies can serve as inspiration for the design ofartificial intelligent systems [86]
In highly evolved systems such as human beings intel-ligence might be also associated with many other higherpredicates emotion creativity consciousness just to namea few Nevertheless robustness prediction adaptation andlearning surely represent the most basic characteristics of allintelligent organisms even the simplest ones Furthermorefrom the control theory perspective besides being hallmarksof intelligence these four features are also very convenientsince they can provide a structured way for the developmentof intelligent controllers
22 Intelligent Control Now based on our previous discus-sion and assuming that an intelligent controller should beable to emulate the most essential traits of intelligence thenit must possess at least the following competencies
Prediction Considering that prediction represents the ulti-mate function of the nervous system the intelligent controllermust be able to incorporate the available knowledge about theplant in order to anticipate the appropriate control action
Adaptation All intelligent organisms use adaptation toaccommodate themselves to the needs for survival Hencethe control scheme should also adapt itself to changes in theplant and in the environment
Learning The capacity to learn by experience and acquireknowledge by interacting with the environment is essential toan intelligent systemWithin the proposed framework onlinelearning improves the ability to predict the dynamics of theplant during task execution
Robustness Since living beings are able to maintain theirfunctions under diverse environmental circumstances theintelligent controller must be robust against modeling inac-curacies and external disturbances with the view of ensuringsafe operating conditions
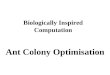
The topology of an intelligent controller designed withinthe proposed framework is shown in Figure 1 In the adoptedscheme both prediction and learning blocks are responsiblefor incorporating knowledge to allow an appropriate controlaction However while the former takes a priori knowledgeavailable in the design phase into account the latter consid-ers a posteriori knowledge acquired by interacting with theenvironment The adaptation block is in charge of adjustingthe learning mechanism Finally by means of the signalscomputed using a priori and a posteriori knowledge therobustness block defines the control action that should besent to the plant
It is important to note that the four attributes consideredin the proposed framework can also be used to distinguish thewide range of control schemes Model-based controllers forexample are able to consider only a priori knowledge Purelyadaptive schemes can not learn and always have to adaptthemselves even to previously experienced situations In factit is easy to infer that neither adaptive nor model-basedcontrollers could be considered intelligent Neverthelessthere are several situations where the distinction would notbe so straightforward
Some control approaches thatmake use of soft computingtechniques might eventually be considered intelligent in abroad context Artificial neural networks employing offlinesupervised training or fuzzy methods based on heuristicschemes have been widely applied for control purposes andcertainly have their application scopes as well However amechatronic agent equipped with such controller could notadapt itself in face of new experiences neither would itperform online learning by interactingwith the environmentTherefore in a strict sense that agent would not be able tocome up with intelligent behavior
Lastly we would like to emphasize that the capacity toemulate intelligence does not necessarily imply better controlperformance There are situations as in the case of industrialrobots operating in a well structured environment and per-forming repetitive tasks in which a model-based controller
Mathematical Problems in Engineering 5
Prediction
Adaptation Robustness System
Reference
Sensory feedback
minus
Learning
INTELLIGENT CONTROLLER
Figure 1 Proposed topology for the intelligent controller
would be the most appropriate choice as long as contactdynamics are not predominant Moreover robust or adaptivemethods can also effectively deal with plants subject tostructured uncertainties ie parameter variations Howeverwhen a high level of uncertainties comes on the scene and amechatronic agent must operate in an environment of imper-fect information intelligent controllers represent the mostappropriate strategy In order to demonstrate this statementan intelligent controller is designed within the proposedframework in the next section Bymeans of the numerical andexperimental results we show in Section 4 that the designedintelligent scheme can handle large uncertainties and noisyinput signals
3 Depth Control of a Micro Diving Agent
Compact underwater agents play an important role inoceanographic research and industrialmonitoringThey havebeen deployed in the investigation of ocean phenomena [87]and in the development of underwater sensor networks [88]However the design of accurate controllers for this kindof mechatronic system can become very challenging dueto their intrinsic nonlinear behavior and highly uncertaindynamics [49] Furthermore they must have a compactsize to be hydrodynamically transparent [87] which clearlyrestricts the dimensions of the embedded electronics and theassociated computational power Therefore the control lawshould be able to deal with a challenging control task even inthe face of restricted computational resources
At this point the framework discussed in the previoussection is employed in the design of an intelligent depthcontroller for an autonomous diving agent Autonomousdiving agents are very representative of modern intelligentmechatronic systems since they should be able to presentreal-time learning in order to regulate their depth evenconsidering all uncertainties and perturbations related tothe underwater environment This framework has been alsosuccessfully applied to the accurate position tracking ofelectrohydraulic servomechanism [89]
The adopted microrobot is a revised and improvedversion of the agent introduced in [49] and was developedat the Institute of Mechanics and Ocean Engineering atHamburg University of Technology [90] The microdiving
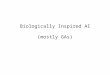
agent and its main components are presented in Figure 2It is equipped with a Teensy 32 microcontroller boardan MS5803-01BA variometer to estimate the depth twoM24M02-DREEPROMchips a 37 V lithium polymer roundcell battery with 1200mAh and an ESP8266WiFi module forout-of-water communication purposes
The diving agent is able to adjust its depth by regulatingthe displaced volume which can be obtained by means of theactuation mechanism depicted in Figure 2(c) The actuationmechanism is composed by a rackpinion mechanism aFaulhaber AM1020-V-3-16 stepper motor with a planetarygear (2561) and a roller diaphragm By driving the piniongear with the stepper motor the rack displaces the rollerdiaphragm and changes the volume of the chamber and itsnet buoyancy force 120591 Considering that due to construc-tive aspects the actuation angle 120579 of the stepper motor isrestricted to 0∘ le 120579 le 130∘ and the net buoyancy force 120591related to 120579 can be estimated according to
120591 = minus120588119892nabla = 120588119892119860Dℎmax (120579max minus 2120579)(4119894rp120579max) (1)
with 120588 the water density 119892 the gravitational acceleration nablathe displaced volume 119860D = 707 times 10minus4m2 the area of theroller diaphragm ℎmax = 004m the maximum stroke of therack 119894rp = 256 the rackpinion transmission ratio and 120579max =227 rad (asymp 130∘) the maximum angular displacement of thestepper motor For more details concerning the diving agentsee [91]
31 System Dynamics The dynamic behavior of an under-water agent must consider both rigid body effects and itsinteraction with the water as well as the actuator dynamicsThe Navier-Stokes equations might be adopted to representthe fluid-rigid body interaction but it would be infeasiblefor real-time control In order to overcome this problem wechoose to adopt the standard lumped parameters approach[92] Thus the vertical motion of the diving agent can bedescribed as follows
119898t + 119888 || = 120591 (2)
where119898t = 119898 + 119898a stands for the mass of the agent plus thehydrodynamic added mass 119911 represents the depth position
6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
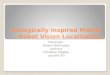
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
adaptive neural network to solve the trajectory trackingproblem of a mobile robot subject to external disturbancesunmodeled dynamics and nonholonomic constraints In [5]a gain scheduling PID controller optimized by a geneticalgorithm is designed for an unmannedmarine surface vesselLu et al [6] combined an interval type 2 fuzzy neural networkwith a proportional-derivative controller and applied theresulting scheme to a Delta parallel robot By means of theLyapunov stability theory Mai and Commuri [7] proposed arobust neural network controller for a prosthetic ankle jointwith gait recognition Radial basis function (RBF) neuralnetwork is adopted in [8] in order to design a reinforcementlearning based adaptive nonlinear optimal controller for anair-breathing hypersonic flight vehicle In [9] adaptive neuralnetworks are also considered for the reinforcement learning-based control of wheeled mobile robots A neural-network-based online near-optimal controller for overhead cranes isobtained in [10] by solving the corresponding Hamilton-Jacobi-Bellman equation Using a network model to mimicthose brain structures related to emotions Lucas et al [11]presented the so-called Brain Emotional Learning BasedIntelligent Controller (BELBIC) This approach was latergeneralized in [12] by choosing a nonlinear learning modulewith universal approximation features
As a result of the essentially nonlinear nature of almostall mechatronic systems nonlinear control methods havebeen frequentlymerged with soft computing approachesTherecursive structure of backstepping for instance representsa mighty feature that has been exploited in the developmentof intelligent controllers In [13] RBF neural networks areadopted as disturbance observers in a backstepping basedapproach to handle with a class of strict-feedback nonlinearsystems subject to modeling imprecisions and input nonlin-earities Lin et al [14] used neural networks and a tuningfunction-based adaptive technique to propose an adaptivebackstepping fault-tolerant control algorithm Gao et al[15] dealt with fault tolerant-control using neural networksand backstepping too but in their case the controller issuitable for multiple-input and multiple-output (MIMO)systems In [16] a neural-network-based adaptive backstep-ping controller is presented for a class of strict-feedbacknonlinear state constrained systems subject to input delayThe control of nonaffine nonlinear systems with time-delaysis in turn tackled with neural networks in a backsteppingway by Wang et al [17] By combining backstepping with aneural approximator Si et al [18] developed a robust controlscheme to cope with nonlinear systems with stochasticdisturbances and unknown hysteresis input Li et al [19]on the other hand proposed an adaptive fuzzy controllerbased on backstepping technique to deal with nonlinearstrict-feedback systems subject to input delay and outputconstraint By using small-gain approaches Zhang et al[20] and Su et al [21] designed adaptive fuzzy backstep-ping schemes for uncertain nonlinear systems Moreovermany other neural and fuzzy backstepping controllers havebeen recently employed in a variety of applications rangingfrom robotic manipulators [22ndash24] to spacecrafts [25ndash27]However although promising alternatives have already beenproposed [28 29] the explosion of complexity which is an
inherent issue in backstepping still poses some difficulties forthe implementation of control schemes based on thismethod
Dynamic surface control (DSC) emerged as an appealingalternative to overcome the problems related to the explosionof terms Nevertheless DSC may lead to instabilities in theclosed-loop system if the designed controller cannot properlycope withmodel uncertainty or external disturbances [30] Inorder to surmount this handicap intelligent approximatorscan be designed to compensate for modeling inaccuracieswithin DSC based schemes In [31] dynamic surface controlis combined with a radial basis function neural network andapplied to a single link manipulator with a flexible jointXu and Sun [32] used fuzzy logic to design an intelligentapproximator within a dynamic surface based controllerDynamic surface control has been also combined with otherneural networks based schemes [33ndash36] and with fuzzyinference systems [37ndash40]
Because of its familiarity with the computed torquetechnique the robotics community has commonly adoptedfeedback linearizationmethod together with machine intelli-gence By using intelligent algorithms the major drawback offeedback linearization namely the requirement of a preciseplant model can be overcome Modeling imprecisions anddisturbances lead to a significant increase in tracking errorwhen feedback linearization is applied without a compensa-tion scheme [41]Hence neural networks [42ndash48] fuzzy logic[49ndash52] and evolutionary computation [53ndash55] for instancehave been used to surpass this limitation and to improvecontrol performance
The fusion of sliding mode control (SMC) and softcomputing is considered a powerful approach to deal withhighly uncertain nonlinear systems [56] Sliding mode con-trollers can successfully handle bounded uncertainties [57]but the utilization of discontinuous relays may lead toundesirable chattering effects [41] Even though a properlydesigned boundary layer has the capacity to completelyeliminate chattering the adoption of this strategy usuallyresults in an inferior tracking performance [58] In this casecomputational intelligence might be used to overcome theshortcomings of smooth sliding controllers [59] As demon-strated by Bessa and Barreto [60] adaptive fuzzy inferencesystems for example can be properly embedded within theboundary layer to compensate for modeling imprecisionsfor the purpose of enhancing the overall control efficiencyThis procedure has already been successfully applied tothe dynamic positioning of underwater vehicles [61 62]vibration suppression in smart structures [63] tracking ofunstable periodic orbits in a chaotic pendulum [64] and thecontrol of electrohydraulic servosystems [65]
Considering that artificial neural networks can performuniversal approximation [66] neural based schemes havebeen also merged with sliding mode controllers for thecompensation of modeling inaccuracies In [67] Azzaro andVeiga proposed a sliding mode controller for nonlinear sys-tems with unknown dynamics By means of the Levenberg-Marquardt algorithm a neural network was trained toidentify the plant dynamics Fei and Lu [68] presented anadaptive sliding mode controller with a neural estimator anda fractional order sliding manifold RBF neural networks and
Mathematical Problems in Engineering 3
a fractional term in the sliding surface are used to improve thecontrol performance In [69] a double loop recurrent neuralnetwork is adopted to approximate unknown plant dynamicswithin a sliding mode controller Zhang et al [70] combinedintegral slidingmodes with a critic neural network to proposean optimal guaranteed cost control scheme for constrained-input nonlinear systems with matched and unmatched dis-turbances Yu and Kaynak addressed the integration of SMCwith some other soft computing techniques in [56] anddiscussed further aspects and new trends about this approachin [59]
Although it might be the dominant paradigm in theaforementioned works could the mere fusion of computa-tional intelligence with modern control theory be enoughto define the resulting control scheme as intelligent Wouldan autonomous mechatronic system equipped with such acontroller be considered an intelligent agent The answersto these questions rely on our understanding of what intelli-gencemeans Moreover as we show in this paper the sense ofwhat defines intelligence can provide a clear path to delineatethe scope of intelligent control
In this work supported by the most common definitionsof natural intelligence we propose a framework for the intelli-gent control of mechatronic agents The intelligent controllershould thereby be able to make reasonable predictions aboutthe expected dynamic behavior of the system adapt itself tochanges in the plant and in the environment learn by experi-ence and by interacting with the environment and be robustto modeling imprecisions and unexpected perturbations Inorder to comply with these four requirements an adaptiveneural network is embedded within the boundary layer ofa smooth sliding mode controller Although several otherapproaches would be possible within the proposed frame-work we think that the adopted strategy has some valuablefeatures which are discussed below Bymeans of a Lyapunov-like stability analysis rigorous proofs for the boundednessand convergence properties of the closed-loop signals areprovidedThe proposed approach is applied to the intelligentdepth control of a microdiving agent Both numerical andexperimental results obtained with the microdiving agentdemonstrate the efficacy of the proposed approach and itssuitableness for both stabilization and trajectory trackingproblems
The following advantages of the proposed strategy canalready be anticipated (i) robustness to both modelinginaccuracies and external disturbances (ii) the ability toincorporate prior knowledge of the plant and also to learnby interacting with the environment (iii) the adoption ofonline learning by minimizing a composite error signalinstead of supervised off-line training (iv) it does not sufferfrom the curse of dimensionality since the proposed neuralnetwork architecture requires only one neuron in the inputlayer instead of all system states or state errors The last twofeatures not only simplify the design process and the resultingcontrol law but also minimize the required computationaleffort As a matter of fact the adoption of only one neuronin the input layer allows the computational complexity of theneural network to be exponentially reduced Moreover theseattributes enable the proposed intelligent controller to be light
enough to be employed inmechatronic systems with reducedcomputational power
Moreover it should be highlighted that the intelligentscheme discussed here introduces a significant improvementover our recently proposed schemewhich has been presentedin [49] By merging sliding mode control with artificial neu-ral networks the new intelligent depth controller providesrobustness and enhances the learning capacities of the divingagent
The rest of the paper is organized as follows The usualconcepts of intelligence and their respective adoption as thebasis of a framework for intelligent control are addressedin Section 2 This discussion guides the design of a newintelligent controller for amicrodiving agent in Section 3Theperformance of the proposed intelligent scheme is evaluatedin Section 4 by means of numerical and experimental resultsFinally the concluding remarks are presented in Section 5
2 A Framework for Intelligent Control
The relevance of control theory to the investigation ofcomplex biological phenomena especially those related tothe nervous system and to natural self-regulating processeswas highlighted seventy years ago in the seminal work byNorbert Wiener [71] The cybernetic approach proposedby Wiener which turned out to be very fruitful to bothbiological and engineering sciences reinforced the benefitsof interdisciplinary research Motivated by this perspectivein this section we outline the essential requirements for anintelligent controller based on concepts derived from areassuch as neuroscience and psychology
21 What Is Intelligence Before starting to discuss the mostcommon definitions it should be clear that here we arereferring to intelligence in a strict sense In fact what weusually consider intelligent depends on our expectationsalthough ordinary people know how to play chess a babywith the same skill would be considered a genius a dog evenif it could only understand the rules of the game would benothing short of a miracle [72] Hence our focus lies on themost fundamental traits of intelligent behavior
In order to delineate the strict meaning of the termpsychologists and neuroscientists have been trying to findthe very essence of intelligence since the beginning of thetwentieth century According to Alfred Binet and TheodoreSimon the fathers of the IQ Test intelligence representsthe faculty of adapting oneself to new circumstances [73]Thereafter many researchers endorsed that adaptation is acore feature of intelligence [74] Nevertheless it should benoted that purely adaptive behavior seems to be not enoughto distinguish an intelligent agent Otherwise even bacteriawhich have the ability to adapt themselves to the environment[75] could be characterized as intelligent organisms Anagent equipped solely with the adaptation attribute has toadapt itself to each change in its environment even if thischange represents the return to a previously experiencedcondition We expect however that an intelligent agentshould be able to recognize an already experienced state and
4 Mathematical Problems in Engineering
thus act accordingly without any readaptation Such behaviorclearly suggests the need for memory and the ability to learn
According to Dawkins [76] the emergence of memory inliving beings represented a great advance inasmuch as theirbehavior could now be influenced not only by the immediatepast but also by events in the distant past
The psychologist Walter Dearborn has soon realized thatthe capacity to learn and to profit by experience representsa key aspect of intelligence [77] Donald Hebb whose workhad an enormous influence on the field of artificial neuralnetworks has also highlighted the importance of learning[78] As a matter of fact Hebbian theory is the basis ofone of the oldest and most important learning rules inneural networks Nowadays there is no doubt that learningis essential for all intelligent beings and it usually occursthroughout their entire lifetime This process involves thecontinuous assimilation of new information followed by theunceasing accommodation of the knowledge basis due toinformation arrival
More recently neuroscientists begun to draw attention toanother essential trait of intelligence the capacity to predictWolpert [79] argued that humans and animals in order toproperly activate their muscles and limbs develop an internalmodel of their own motor systems and of their environmentas well This internal model is constantly updated by sensoryfeedback and is used by the central nervous system (CNS) topredict the consequences of its control actions [80] Edwardset al [81] propose that the brain creates internal models of theenvironment to predict imminent sensory input Llinas [82]emphasized that prediction is the prime objective of the brainand is imperative for intelligent motricity In [83] Llinas andRoy suggested that the CNS has evolved for the purpose ofpredicting the outcomes of the impendingmotionMoreoversince prediction in this case should be unique the authorsalso claim that this feature may have led to the emergence ofself-awareness in complex living beings
Another well-known property of biological systems isrobustness [84] Robust organisms are able to keep theirfunctions even in the case of unexpected perturbationsand under diverse environmental conditions According toKitano [85] since robustness favors evolvability robust traitsare usually selected by evolution In addition these naturallyselected strategies can serve as inspiration for the design ofartificial intelligent systems [86]
In highly evolved systems such as human beings intel-ligence might be also associated with many other higherpredicates emotion creativity consciousness just to namea few Nevertheless robustness prediction adaptation andlearning surely represent the most basic characteristics of allintelligent organisms even the simplest ones Furthermorefrom the control theory perspective besides being hallmarksof intelligence these four features are also very convenientsince they can provide a structured way for the developmentof intelligent controllers
22 Intelligent Control Now based on our previous discus-sion and assuming that an intelligent controller should beable to emulate the most essential traits of intelligence thenit must possess at least the following competencies
Prediction Considering that prediction represents the ulti-mate function of the nervous system the intelligent controllermust be able to incorporate the available knowledge about theplant in order to anticipate the appropriate control action
Adaptation All intelligent organisms use adaptation toaccommodate themselves to the needs for survival Hencethe control scheme should also adapt itself to changes in theplant and in the environment
Learning The capacity to learn by experience and acquireknowledge by interacting with the environment is essential toan intelligent systemWithin the proposed framework onlinelearning improves the ability to predict the dynamics of theplant during task execution
Robustness Since living beings are able to maintain theirfunctions under diverse environmental circumstances theintelligent controller must be robust against modeling inac-curacies and external disturbances with the view of ensuringsafe operating conditions
The topology of an intelligent controller designed withinthe proposed framework is shown in Figure 1 In the adoptedscheme both prediction and learning blocks are responsiblefor incorporating knowledge to allow an appropriate controlaction However while the former takes a priori knowledgeavailable in the design phase into account the latter consid-ers a posteriori knowledge acquired by interacting with theenvironment The adaptation block is in charge of adjustingthe learning mechanism Finally by means of the signalscomputed using a priori and a posteriori knowledge therobustness block defines the control action that should besent to the plant
It is important to note that the four attributes consideredin the proposed framework can also be used to distinguish thewide range of control schemes Model-based controllers forexample are able to consider only a priori knowledge Purelyadaptive schemes can not learn and always have to adaptthemselves even to previously experienced situations In factit is easy to infer that neither adaptive nor model-basedcontrollers could be considered intelligent Neverthelessthere are several situations where the distinction would notbe so straightforward
Some control approaches thatmake use of soft computingtechniques might eventually be considered intelligent in abroad context Artificial neural networks employing offlinesupervised training or fuzzy methods based on heuristicschemes have been widely applied for control purposes andcertainly have their application scopes as well However amechatronic agent equipped with such controller could notadapt itself in face of new experiences neither would itperform online learning by interactingwith the environmentTherefore in a strict sense that agent would not be able tocome up with intelligent behavior
Lastly we would like to emphasize that the capacity toemulate intelligence does not necessarily imply better controlperformance There are situations as in the case of industrialrobots operating in a well structured environment and per-forming repetitive tasks in which a model-based controller
Mathematical Problems in Engineering 5
Prediction
Adaptation Robustness System
Reference
Sensory feedback
minus
Learning
INTELLIGENT CONTROLLER
Figure 1 Proposed topology for the intelligent controller
would be the most appropriate choice as long as contactdynamics are not predominant Moreover robust or adaptivemethods can also effectively deal with plants subject tostructured uncertainties ie parameter variations Howeverwhen a high level of uncertainties comes on the scene and amechatronic agent must operate in an environment of imper-fect information intelligent controllers represent the mostappropriate strategy In order to demonstrate this statementan intelligent controller is designed within the proposedframework in the next section Bymeans of the numerical andexperimental results we show in Section 4 that the designedintelligent scheme can handle large uncertainties and noisyinput signals
3 Depth Control of a Micro Diving Agent
Compact underwater agents play an important role inoceanographic research and industrialmonitoringThey havebeen deployed in the investigation of ocean phenomena [87]and in the development of underwater sensor networks [88]However the design of accurate controllers for this kindof mechatronic system can become very challenging dueto their intrinsic nonlinear behavior and highly uncertaindynamics [49] Furthermore they must have a compactsize to be hydrodynamically transparent [87] which clearlyrestricts the dimensions of the embedded electronics and theassociated computational power Therefore the control lawshould be able to deal with a challenging control task even inthe face of restricted computational resources
At this point the framework discussed in the previoussection is employed in the design of an intelligent depthcontroller for an autonomous diving agent Autonomousdiving agents are very representative of modern intelligentmechatronic systems since they should be able to presentreal-time learning in order to regulate their depth evenconsidering all uncertainties and perturbations related tothe underwater environment This framework has been alsosuccessfully applied to the accurate position tracking ofelectrohydraulic servomechanism [89]
The adopted microrobot is a revised and improvedversion of the agent introduced in [49] and was developedat the Institute of Mechanics and Ocean Engineering atHamburg University of Technology [90] The microdiving
agent and its main components are presented in Figure 2It is equipped with a Teensy 32 microcontroller boardan MS5803-01BA variometer to estimate the depth twoM24M02-DREEPROMchips a 37 V lithium polymer roundcell battery with 1200mAh and an ESP8266WiFi module forout-of-water communication purposes
The diving agent is able to adjust its depth by regulatingthe displaced volume which can be obtained by means of theactuation mechanism depicted in Figure 2(c) The actuationmechanism is composed by a rackpinion mechanism aFaulhaber AM1020-V-3-16 stepper motor with a planetarygear (2561) and a roller diaphragm By driving the piniongear with the stepper motor the rack displaces the rollerdiaphragm and changes the volume of the chamber and itsnet buoyancy force 120591 Considering that due to construc-tive aspects the actuation angle 120579 of the stepper motor isrestricted to 0∘ le 120579 le 130∘ and the net buoyancy force 120591related to 120579 can be estimated according to
120591 = minus120588119892nabla = 120588119892119860Dℎmax (120579max minus 2120579)(4119894rp120579max) (1)
with 120588 the water density 119892 the gravitational acceleration nablathe displaced volume 119860D = 707 times 10minus4m2 the area of theroller diaphragm ℎmax = 004m the maximum stroke of therack 119894rp = 256 the rackpinion transmission ratio and 120579max =227 rad (asymp 130∘) the maximum angular displacement of thestepper motor For more details concerning the diving agentsee [91]
31 System Dynamics The dynamic behavior of an under-water agent must consider both rigid body effects and itsinteraction with the water as well as the actuator dynamicsThe Navier-Stokes equations might be adopted to representthe fluid-rigid body interaction but it would be infeasiblefor real-time control In order to overcome this problem wechoose to adopt the standard lumped parameters approach[92] Thus the vertical motion of the diving agent can bedescribed as follows
119898t + 119888 || = 120591 (2)
where119898t = 119898 + 119898a stands for the mass of the agent plus thehydrodynamic added mass 119911 represents the depth position
6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
a fractional term in the sliding surface are used to improve thecontrol performance In [69] a double loop recurrent neuralnetwork is adopted to approximate unknown plant dynamicswithin a sliding mode controller Zhang et al [70] combinedintegral slidingmodes with a critic neural network to proposean optimal guaranteed cost control scheme for constrained-input nonlinear systems with matched and unmatched dis-turbances Yu and Kaynak addressed the integration of SMCwith some other soft computing techniques in [56] anddiscussed further aspects and new trends about this approachin [59]
Although it might be the dominant paradigm in theaforementioned works could the mere fusion of computa-tional intelligence with modern control theory be enoughto define the resulting control scheme as intelligent Wouldan autonomous mechatronic system equipped with such acontroller be considered an intelligent agent The answersto these questions rely on our understanding of what intelli-gencemeans Moreover as we show in this paper the sense ofwhat defines intelligence can provide a clear path to delineatethe scope of intelligent control
In this work supported by the most common definitionsof natural intelligence we propose a framework for the intelli-gent control of mechatronic agents The intelligent controllershould thereby be able to make reasonable predictions aboutthe expected dynamic behavior of the system adapt itself tochanges in the plant and in the environment learn by experi-ence and by interacting with the environment and be robustto modeling imprecisions and unexpected perturbations Inorder to comply with these four requirements an adaptiveneural network is embedded within the boundary layer ofa smooth sliding mode controller Although several otherapproaches would be possible within the proposed frame-work we think that the adopted strategy has some valuablefeatures which are discussed below Bymeans of a Lyapunov-like stability analysis rigorous proofs for the boundednessand convergence properties of the closed-loop signals areprovidedThe proposed approach is applied to the intelligentdepth control of a microdiving agent Both numerical andexperimental results obtained with the microdiving agentdemonstrate the efficacy of the proposed approach and itssuitableness for both stabilization and trajectory trackingproblems
The following advantages of the proposed strategy canalready be anticipated (i) robustness to both modelinginaccuracies and external disturbances (ii) the ability toincorporate prior knowledge of the plant and also to learnby interacting with the environment (iii) the adoption ofonline learning by minimizing a composite error signalinstead of supervised off-line training (iv) it does not sufferfrom the curse of dimensionality since the proposed neuralnetwork architecture requires only one neuron in the inputlayer instead of all system states or state errors The last twofeatures not only simplify the design process and the resultingcontrol law but also minimize the required computationaleffort As a matter of fact the adoption of only one neuronin the input layer allows the computational complexity of theneural network to be exponentially reduced Moreover theseattributes enable the proposed intelligent controller to be light
enough to be employed inmechatronic systems with reducedcomputational power
Moreover it should be highlighted that the intelligentscheme discussed here introduces a significant improvementover our recently proposed schemewhich has been presentedin [49] By merging sliding mode control with artificial neu-ral networks the new intelligent depth controller providesrobustness and enhances the learning capacities of the divingagent
The rest of the paper is organized as follows The usualconcepts of intelligence and their respective adoption as thebasis of a framework for intelligent control are addressedin Section 2 This discussion guides the design of a newintelligent controller for amicrodiving agent in Section 3Theperformance of the proposed intelligent scheme is evaluatedin Section 4 by means of numerical and experimental resultsFinally the concluding remarks are presented in Section 5
2 A Framework for Intelligent Control
The relevance of control theory to the investigation ofcomplex biological phenomena especially those related tothe nervous system and to natural self-regulating processeswas highlighted seventy years ago in the seminal work byNorbert Wiener [71] The cybernetic approach proposedby Wiener which turned out to be very fruitful to bothbiological and engineering sciences reinforced the benefitsof interdisciplinary research Motivated by this perspectivein this section we outline the essential requirements for anintelligent controller based on concepts derived from areassuch as neuroscience and psychology
21 What Is Intelligence Before starting to discuss the mostcommon definitions it should be clear that here we arereferring to intelligence in a strict sense In fact what weusually consider intelligent depends on our expectationsalthough ordinary people know how to play chess a babywith the same skill would be considered a genius a dog evenif it could only understand the rules of the game would benothing short of a miracle [72] Hence our focus lies on themost fundamental traits of intelligent behavior
In order to delineate the strict meaning of the termpsychologists and neuroscientists have been trying to findthe very essence of intelligence since the beginning of thetwentieth century According to Alfred Binet and TheodoreSimon the fathers of the IQ Test intelligence representsthe faculty of adapting oneself to new circumstances [73]Thereafter many researchers endorsed that adaptation is acore feature of intelligence [74] Nevertheless it should benoted that purely adaptive behavior seems to be not enoughto distinguish an intelligent agent Otherwise even bacteriawhich have the ability to adapt themselves to the environment[75] could be characterized as intelligent organisms Anagent equipped solely with the adaptation attribute has toadapt itself to each change in its environment even if thischange represents the return to a previously experiencedcondition We expect however that an intelligent agentshould be able to recognize an already experienced state and
4 Mathematical Problems in Engineering
thus act accordingly without any readaptation Such behaviorclearly suggests the need for memory and the ability to learn
According to Dawkins [76] the emergence of memory inliving beings represented a great advance inasmuch as theirbehavior could now be influenced not only by the immediatepast but also by events in the distant past
The psychologist Walter Dearborn has soon realized thatthe capacity to learn and to profit by experience representsa key aspect of intelligence [77] Donald Hebb whose workhad an enormous influence on the field of artificial neuralnetworks has also highlighted the importance of learning[78] As a matter of fact Hebbian theory is the basis ofone of the oldest and most important learning rules inneural networks Nowadays there is no doubt that learningis essential for all intelligent beings and it usually occursthroughout their entire lifetime This process involves thecontinuous assimilation of new information followed by theunceasing accommodation of the knowledge basis due toinformation arrival
More recently neuroscientists begun to draw attention toanother essential trait of intelligence the capacity to predictWolpert [79] argued that humans and animals in order toproperly activate their muscles and limbs develop an internalmodel of their own motor systems and of their environmentas well This internal model is constantly updated by sensoryfeedback and is used by the central nervous system (CNS) topredict the consequences of its control actions [80] Edwardset al [81] propose that the brain creates internal models of theenvironment to predict imminent sensory input Llinas [82]emphasized that prediction is the prime objective of the brainand is imperative for intelligent motricity In [83] Llinas andRoy suggested that the CNS has evolved for the purpose ofpredicting the outcomes of the impendingmotionMoreoversince prediction in this case should be unique the authorsalso claim that this feature may have led to the emergence ofself-awareness in complex living beings
Another well-known property of biological systems isrobustness [84] Robust organisms are able to keep theirfunctions even in the case of unexpected perturbationsand under diverse environmental conditions According toKitano [85] since robustness favors evolvability robust traitsare usually selected by evolution In addition these naturallyselected strategies can serve as inspiration for the design ofartificial intelligent systems [86]
In highly evolved systems such as human beings intel-ligence might be also associated with many other higherpredicates emotion creativity consciousness just to namea few Nevertheless robustness prediction adaptation andlearning surely represent the most basic characteristics of allintelligent organisms even the simplest ones Furthermorefrom the control theory perspective besides being hallmarksof intelligence these four features are also very convenientsince they can provide a structured way for the developmentof intelligent controllers
22 Intelligent Control Now based on our previous discus-sion and assuming that an intelligent controller should beable to emulate the most essential traits of intelligence thenit must possess at least the following competencies
Prediction Considering that prediction represents the ulti-mate function of the nervous system the intelligent controllermust be able to incorporate the available knowledge about theplant in order to anticipate the appropriate control action
Adaptation All intelligent organisms use adaptation toaccommodate themselves to the needs for survival Hencethe control scheme should also adapt itself to changes in theplant and in the environment
Learning The capacity to learn by experience and acquireknowledge by interacting with the environment is essential toan intelligent systemWithin the proposed framework onlinelearning improves the ability to predict the dynamics of theplant during task execution
Robustness Since living beings are able to maintain theirfunctions under diverse environmental circumstances theintelligent controller must be robust against modeling inac-curacies and external disturbances with the view of ensuringsafe operating conditions
The topology of an intelligent controller designed withinthe proposed framework is shown in Figure 1 In the adoptedscheme both prediction and learning blocks are responsiblefor incorporating knowledge to allow an appropriate controlaction However while the former takes a priori knowledgeavailable in the design phase into account the latter consid-ers a posteriori knowledge acquired by interacting with theenvironment The adaptation block is in charge of adjustingthe learning mechanism Finally by means of the signalscomputed using a priori and a posteriori knowledge therobustness block defines the control action that should besent to the plant
It is important to note that the four attributes consideredin the proposed framework can also be used to distinguish thewide range of control schemes Model-based controllers forexample are able to consider only a priori knowledge Purelyadaptive schemes can not learn and always have to adaptthemselves even to previously experienced situations In factit is easy to infer that neither adaptive nor model-basedcontrollers could be considered intelligent Neverthelessthere are several situations where the distinction would notbe so straightforward
Some control approaches thatmake use of soft computingtechniques might eventually be considered intelligent in abroad context Artificial neural networks employing offlinesupervised training or fuzzy methods based on heuristicschemes have been widely applied for control purposes andcertainly have their application scopes as well However amechatronic agent equipped with such controller could notadapt itself in face of new experiences neither would itperform online learning by interactingwith the environmentTherefore in a strict sense that agent would not be able tocome up with intelligent behavior
Lastly we would like to emphasize that the capacity toemulate intelligence does not necessarily imply better controlperformance There are situations as in the case of industrialrobots operating in a well structured environment and per-forming repetitive tasks in which a model-based controller
Mathematical Problems in Engineering 5
Prediction
Adaptation Robustness System
Reference
Sensory feedback
minus
Learning
INTELLIGENT CONTROLLER
Figure 1 Proposed topology for the intelligent controller
would be the most appropriate choice as long as contactdynamics are not predominant Moreover robust or adaptivemethods can also effectively deal with plants subject tostructured uncertainties ie parameter variations Howeverwhen a high level of uncertainties comes on the scene and amechatronic agent must operate in an environment of imper-fect information intelligent controllers represent the mostappropriate strategy In order to demonstrate this statementan intelligent controller is designed within the proposedframework in the next section Bymeans of the numerical andexperimental results we show in Section 4 that the designedintelligent scheme can handle large uncertainties and noisyinput signals
3 Depth Control of a Micro Diving Agent
Compact underwater agents play an important role inoceanographic research and industrialmonitoringThey havebeen deployed in the investigation of ocean phenomena [87]and in the development of underwater sensor networks [88]However the design of accurate controllers for this kindof mechatronic system can become very challenging dueto their intrinsic nonlinear behavior and highly uncertaindynamics [49] Furthermore they must have a compactsize to be hydrodynamically transparent [87] which clearlyrestricts the dimensions of the embedded electronics and theassociated computational power Therefore the control lawshould be able to deal with a challenging control task even inthe face of restricted computational resources
At this point the framework discussed in the previoussection is employed in the design of an intelligent depthcontroller for an autonomous diving agent Autonomousdiving agents are very representative of modern intelligentmechatronic systems since they should be able to presentreal-time learning in order to regulate their depth evenconsidering all uncertainties and perturbations related tothe underwater environment This framework has been alsosuccessfully applied to the accurate position tracking ofelectrohydraulic servomechanism [89]
The adopted microrobot is a revised and improvedversion of the agent introduced in [49] and was developedat the Institute of Mechanics and Ocean Engineering atHamburg University of Technology [90] The microdiving
agent and its main components are presented in Figure 2It is equipped with a Teensy 32 microcontroller boardan MS5803-01BA variometer to estimate the depth twoM24M02-DREEPROMchips a 37 V lithium polymer roundcell battery with 1200mAh and an ESP8266WiFi module forout-of-water communication purposes
The diving agent is able to adjust its depth by regulatingthe displaced volume which can be obtained by means of theactuation mechanism depicted in Figure 2(c) The actuationmechanism is composed by a rackpinion mechanism aFaulhaber AM1020-V-3-16 stepper motor with a planetarygear (2561) and a roller diaphragm By driving the piniongear with the stepper motor the rack displaces the rollerdiaphragm and changes the volume of the chamber and itsnet buoyancy force 120591 Considering that due to construc-tive aspects the actuation angle 120579 of the stepper motor isrestricted to 0∘ le 120579 le 130∘ and the net buoyancy force 120591related to 120579 can be estimated according to
120591 = minus120588119892nabla = 120588119892119860Dℎmax (120579max minus 2120579)(4119894rp120579max) (1)
with 120588 the water density 119892 the gravitational acceleration nablathe displaced volume 119860D = 707 times 10minus4m2 the area of theroller diaphragm ℎmax = 004m the maximum stroke of therack 119894rp = 256 the rackpinion transmission ratio and 120579max =227 rad (asymp 130∘) the maximum angular displacement of thestepper motor For more details concerning the diving agentsee [91]
31 System Dynamics The dynamic behavior of an under-water agent must consider both rigid body effects and itsinteraction with the water as well as the actuator dynamicsThe Navier-Stokes equations might be adopted to representthe fluid-rigid body interaction but it would be infeasiblefor real-time control In order to overcome this problem wechoose to adopt the standard lumped parameters approach[92] Thus the vertical motion of the diving agent can bedescribed as follows
119898t + 119888 || = 120591 (2)
where119898t = 119898 + 119898a stands for the mass of the agent plus thehydrodynamic added mass 119911 represents the depth position
6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
thus act accordingly without any readaptation Such behaviorclearly suggests the need for memory and the ability to learn
According to Dawkins [76] the emergence of memory inliving beings represented a great advance inasmuch as theirbehavior could now be influenced not only by the immediatepast but also by events in the distant past
The psychologist Walter Dearborn has soon realized thatthe capacity to learn and to profit by experience representsa key aspect of intelligence [77] Donald Hebb whose workhad an enormous influence on the field of artificial neuralnetworks has also highlighted the importance of learning[78] As a matter of fact Hebbian theory is the basis ofone of the oldest and most important learning rules inneural networks Nowadays there is no doubt that learningis essential for all intelligent beings and it usually occursthroughout their entire lifetime This process involves thecontinuous assimilation of new information followed by theunceasing accommodation of the knowledge basis due toinformation arrival
More recently neuroscientists begun to draw attention toanother essential trait of intelligence the capacity to predictWolpert [79] argued that humans and animals in order toproperly activate their muscles and limbs develop an internalmodel of their own motor systems and of their environmentas well This internal model is constantly updated by sensoryfeedback and is used by the central nervous system (CNS) topredict the consequences of its control actions [80] Edwardset al [81] propose that the brain creates internal models of theenvironment to predict imminent sensory input Llinas [82]emphasized that prediction is the prime objective of the brainand is imperative for intelligent motricity In [83] Llinas andRoy suggested that the CNS has evolved for the purpose ofpredicting the outcomes of the impendingmotionMoreoversince prediction in this case should be unique the authorsalso claim that this feature may have led to the emergence ofself-awareness in complex living beings
Another well-known property of biological systems isrobustness [84] Robust organisms are able to keep theirfunctions even in the case of unexpected perturbationsand under diverse environmental conditions According toKitano [85] since robustness favors evolvability robust traitsare usually selected by evolution In addition these naturallyselected strategies can serve as inspiration for the design ofartificial intelligent systems [86]
In highly evolved systems such as human beings intel-ligence might be also associated with many other higherpredicates emotion creativity consciousness just to namea few Nevertheless robustness prediction adaptation andlearning surely represent the most basic characteristics of allintelligent organisms even the simplest ones Furthermorefrom the control theory perspective besides being hallmarksof intelligence these four features are also very convenientsince they can provide a structured way for the developmentof intelligent controllers
22 Intelligent Control Now based on our previous discus-sion and assuming that an intelligent controller should beable to emulate the most essential traits of intelligence thenit must possess at least the following competencies
Prediction Considering that prediction represents the ulti-mate function of the nervous system the intelligent controllermust be able to incorporate the available knowledge about theplant in order to anticipate the appropriate control action
Adaptation All intelligent organisms use adaptation toaccommodate themselves to the needs for survival Hencethe control scheme should also adapt itself to changes in theplant and in the environment
Learning The capacity to learn by experience and acquireknowledge by interacting with the environment is essential toan intelligent systemWithin the proposed framework onlinelearning improves the ability to predict the dynamics of theplant during task execution
Robustness Since living beings are able to maintain theirfunctions under diverse environmental circumstances theintelligent controller must be robust against modeling inac-curacies and external disturbances with the view of ensuringsafe operating conditions
The topology of an intelligent controller designed withinthe proposed framework is shown in Figure 1 In the adoptedscheme both prediction and learning blocks are responsiblefor incorporating knowledge to allow an appropriate controlaction However while the former takes a priori knowledgeavailable in the design phase into account the latter consid-ers a posteriori knowledge acquired by interacting with theenvironment The adaptation block is in charge of adjustingthe learning mechanism Finally by means of the signalscomputed using a priori and a posteriori knowledge therobustness block defines the control action that should besent to the plant
It is important to note that the four attributes consideredin the proposed framework can also be used to distinguish thewide range of control schemes Model-based controllers forexample are able to consider only a priori knowledge Purelyadaptive schemes can not learn and always have to adaptthemselves even to previously experienced situations In factit is easy to infer that neither adaptive nor model-basedcontrollers could be considered intelligent Neverthelessthere are several situations where the distinction would notbe so straightforward
Some control approaches thatmake use of soft computingtechniques might eventually be considered intelligent in abroad context Artificial neural networks employing offlinesupervised training or fuzzy methods based on heuristicschemes have been widely applied for control purposes andcertainly have their application scopes as well However amechatronic agent equipped with such controller could notadapt itself in face of new experiences neither would itperform online learning by interactingwith the environmentTherefore in a strict sense that agent would not be able tocome up with intelligent behavior
Lastly we would like to emphasize that the capacity toemulate intelligence does not necessarily imply better controlperformance There are situations as in the case of industrialrobots operating in a well structured environment and per-forming repetitive tasks in which a model-based controller
Mathematical Problems in Engineering 5
Prediction
Adaptation Robustness System
Reference
Sensory feedback
minus
Learning
INTELLIGENT CONTROLLER
Figure 1 Proposed topology for the intelligent controller
would be the most appropriate choice as long as contactdynamics are not predominant Moreover robust or adaptivemethods can also effectively deal with plants subject tostructured uncertainties ie parameter variations Howeverwhen a high level of uncertainties comes on the scene and amechatronic agent must operate in an environment of imper-fect information intelligent controllers represent the mostappropriate strategy In order to demonstrate this statementan intelligent controller is designed within the proposedframework in the next section Bymeans of the numerical andexperimental results we show in Section 4 that the designedintelligent scheme can handle large uncertainties and noisyinput signals
3 Depth Control of a Micro Diving Agent
Compact underwater agents play an important role inoceanographic research and industrialmonitoringThey havebeen deployed in the investigation of ocean phenomena [87]and in the development of underwater sensor networks [88]However the design of accurate controllers for this kindof mechatronic system can become very challenging dueto their intrinsic nonlinear behavior and highly uncertaindynamics [49] Furthermore they must have a compactsize to be hydrodynamically transparent [87] which clearlyrestricts the dimensions of the embedded electronics and theassociated computational power Therefore the control lawshould be able to deal with a challenging control task even inthe face of restricted computational resources
At this point the framework discussed in the previoussection is employed in the design of an intelligent depthcontroller for an autonomous diving agent Autonomousdiving agents are very representative of modern intelligentmechatronic systems since they should be able to presentreal-time learning in order to regulate their depth evenconsidering all uncertainties and perturbations related tothe underwater environment This framework has been alsosuccessfully applied to the accurate position tracking ofelectrohydraulic servomechanism [89]
The adopted microrobot is a revised and improvedversion of the agent introduced in [49] and was developedat the Institute of Mechanics and Ocean Engineering atHamburg University of Technology [90] The microdiving
agent and its main components are presented in Figure 2It is equipped with a Teensy 32 microcontroller boardan MS5803-01BA variometer to estimate the depth twoM24M02-DREEPROMchips a 37 V lithium polymer roundcell battery with 1200mAh and an ESP8266WiFi module forout-of-water communication purposes
The diving agent is able to adjust its depth by regulatingthe displaced volume which can be obtained by means of theactuation mechanism depicted in Figure 2(c) The actuationmechanism is composed by a rackpinion mechanism aFaulhaber AM1020-V-3-16 stepper motor with a planetarygear (2561) and a roller diaphragm By driving the piniongear with the stepper motor the rack displaces the rollerdiaphragm and changes the volume of the chamber and itsnet buoyancy force 120591 Considering that due to construc-tive aspects the actuation angle 120579 of the stepper motor isrestricted to 0∘ le 120579 le 130∘ and the net buoyancy force 120591related to 120579 can be estimated according to
120591 = minus120588119892nabla = 120588119892119860Dℎmax (120579max minus 2120579)(4119894rp120579max) (1)
with 120588 the water density 119892 the gravitational acceleration nablathe displaced volume 119860D = 707 times 10minus4m2 the area of theroller diaphragm ℎmax = 004m the maximum stroke of therack 119894rp = 256 the rackpinion transmission ratio and 120579max =227 rad (asymp 130∘) the maximum angular displacement of thestepper motor For more details concerning the diving agentsee [91]
31 System Dynamics The dynamic behavior of an under-water agent must consider both rigid body effects and itsinteraction with the water as well as the actuator dynamicsThe Navier-Stokes equations might be adopted to representthe fluid-rigid body interaction but it would be infeasiblefor real-time control In order to overcome this problem wechoose to adopt the standard lumped parameters approach[92] Thus the vertical motion of the diving agent can bedescribed as follows
119898t + 119888 || = 120591 (2)
where119898t = 119898 + 119898a stands for the mass of the agent plus thehydrodynamic added mass 119911 represents the depth position
6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
Prediction
Adaptation Robustness System
Reference
Sensory feedback
minus
Learning
INTELLIGENT CONTROLLER
Figure 1 Proposed topology for the intelligent controller
would be the most appropriate choice as long as contactdynamics are not predominant Moreover robust or adaptivemethods can also effectively deal with plants subject tostructured uncertainties ie parameter variations Howeverwhen a high level of uncertainties comes on the scene and amechatronic agent must operate in an environment of imper-fect information intelligent controllers represent the mostappropriate strategy In order to demonstrate this statementan intelligent controller is designed within the proposedframework in the next section Bymeans of the numerical andexperimental results we show in Section 4 that the designedintelligent scheme can handle large uncertainties and noisyinput signals
3 Depth Control of a Micro Diving Agent
Compact underwater agents play an important role inoceanographic research and industrialmonitoringThey havebeen deployed in the investigation of ocean phenomena [87]and in the development of underwater sensor networks [88]However the design of accurate controllers for this kindof mechatronic system can become very challenging dueto their intrinsic nonlinear behavior and highly uncertaindynamics [49] Furthermore they must have a compactsize to be hydrodynamically transparent [87] which clearlyrestricts the dimensions of the embedded electronics and theassociated computational power Therefore the control lawshould be able to deal with a challenging control task even inthe face of restricted computational resources
At this point the framework discussed in the previoussection is employed in the design of an intelligent depthcontroller for an autonomous diving agent Autonomousdiving agents are very representative of modern intelligentmechatronic systems since they should be able to presentreal-time learning in order to regulate their depth evenconsidering all uncertainties and perturbations related tothe underwater environment This framework has been alsosuccessfully applied to the accurate position tracking ofelectrohydraulic servomechanism [89]
The adopted microrobot is a revised and improvedversion of the agent introduced in [49] and was developedat the Institute of Mechanics and Ocean Engineering atHamburg University of Technology [90] The microdiving
agent and its main components are presented in Figure 2It is equipped with a Teensy 32 microcontroller boardan MS5803-01BA variometer to estimate the depth twoM24M02-DREEPROMchips a 37 V lithium polymer roundcell battery with 1200mAh and an ESP8266WiFi module forout-of-water communication purposes
The diving agent is able to adjust its depth by regulatingthe displaced volume which can be obtained by means of theactuation mechanism depicted in Figure 2(c) The actuationmechanism is composed by a rackpinion mechanism aFaulhaber AM1020-V-3-16 stepper motor with a planetarygear (2561) and a roller diaphragm By driving the piniongear with the stepper motor the rack displaces the rollerdiaphragm and changes the volume of the chamber and itsnet buoyancy force 120591 Considering that due to construc-tive aspects the actuation angle 120579 of the stepper motor isrestricted to 0∘ le 120579 le 130∘ and the net buoyancy force 120591related to 120579 can be estimated according to
120591 = minus120588119892nabla = 120588119892119860Dℎmax (120579max minus 2120579)(4119894rp120579max) (1)
with 120588 the water density 119892 the gravitational acceleration nablathe displaced volume 119860D = 707 times 10minus4m2 the area of theroller diaphragm ℎmax = 004m the maximum stroke of therack 119894rp = 256 the rackpinion transmission ratio and 120579max =227 rad (asymp 130∘) the maximum angular displacement of thestepper motor For more details concerning the diving agentsee [91]
31 System Dynamics The dynamic behavior of an under-water agent must consider both rigid body effects and itsinteraction with the water as well as the actuator dynamicsThe Navier-Stokes equations might be adopted to representthe fluid-rigid body interaction but it would be infeasiblefor real-time control In order to overcome this problem wechoose to adopt the standard lumped parameters approach[92] Thus the vertical motion of the diving agent can bedescribed as follows
119898t + 119888 || = 120591 (2)
where119898t = 119898 + 119898a stands for the mass of the agent plus thehydrodynamic added mass 119911 represents the depth position
6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
(a) Assembled system
WiFi Module
Pinion
Microcontroller
(b) Inside view
PinionRack
Diaphragm
(c) Actuation mechanism
Figure 2 Microdiving agent and its main components
with the 119911-axis pointing downwards and 119888 is the coefficientof the hydrodynamic quadratic damping
Considering that the actuator dynamics should not beneglected [49] a first-order low pass filter is used to describeits behavior
120591 = minus120572 (120591 minus 119906) (3)
where 119906 is the control signal and 120572 is a strictly positiveparameter concerning the filter time constant
Equations (2) and (3) allow the intelligent controller to benumerically evaluated prior to its implementation in the realdiving agent
32 Intelligent Controller With the view to design the intel-ligent control scheme only the dynamical effects that can berigorously computed in a straightforward manner are takeninto consideration All terms in (2) whose coefficients haveto be experimentally estimated and are subject to variationsin time are considered as model uncertainties and neglectedin the design of the control law Thus for control purposes(3) is combined with the time derivative of 119898 = 120591 leadingto a third-order differential equation
119898119911 = 120572 (119906 minus 120591) + 119889 (4)
where 119889 stands for the neglected hydrodynamic effects andexternal disturbances that may occur
The distinction between the scopes of the two mathemat-ical models should be stressed while (2) and (3) are adoptedto simulate the dynamics of the agent in numerical studies(4) is considered in the design of the controller that is used inboth numerical and experimental evaluations
The control task is to ensure that the state vector z =[119911 ]⊤ will follow a desired reference zd = [119911d d d]⊤even in the presence of modeling inaccuracies At this pointthe sliding mode method is invoked to comply with the
required robustness and to accommodate the prior knowl-edge about the plant Hence a sliding manifold is establishedin the state space
120590 (z) = 119911 + 2120582 119911 + 1205822 = 0 (5)
where z = [ 119911 119911]⊤ = [119911 minus 119911d minus d minus d]⊤ is the errorvector and 120582 is a strictly positive constant
In order to avoid the undesirable chattering effects thestandard relay term sgn(120590) is smoothed out by means of asaturation function
sat(120590120601) =
sgn (120590) if1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 ge 1
120590120601 if
1003816100381610038161003816100381610038161003816100381612059012060110038161003816100381610038161003816100381610038161003816 lt 1 (6)
where 120601 is a positive parameter that represents the widthof the resulting boundary layer that neighbors the slidingmanifold In addition the control law is designed to ensurethe attractiveness of the boundary layer
119906 = 120572minus1 [120572120591 + 119898(119911d minus 2120582 119911 minus 1205822 119911) minus 119889 minus 120581 sat(120590120601)] (7)
with 120581 representing the control gain and 119889 standing for anestimate of 119889
Considering that artificial neural networks can be used asuniversal approximators [66] a single hidden layer network isadopted to estimate the neglected dynamical effects Further-more artificial neural networks have the capacity to fulfill therequired learning features
In order to avoid the issues related to the curse ofdimensionality [93] this work considers only the switchingvariable in the input layer
119889 = w⊤120593 (120590) (8)
where w = [1199081 1199082 119908119899]⊤ is the weight vector 120593(120590) =[1205931 1205932 120593119899]⊤ represents the vector with the activation
Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
Σ
Input Hidden layer Output
1
2
3
n
w1
w2
w3
wn
d
Figure 3 Single hidden layer network
functions120593119894 119894 = 1 119899 and 119899 is the total number of neuronsin the hidden layer The adopted layout for the single hiddenlayer network is depicted in Figure 3
It should be noted that if the three state errors ( 119911 119911)have been adopted as input instead of a single switching vari-able 120590 the computational complexity of the neural networkwould exponentially grow from 119899 to 1198993
Now the boundedness and the convergence propertiesof the closed-loop signals are investigated by means of aLyapunov-like stability analysis Thus let a positive-definitefunction 119881 be defined as
119881 (119905) = 121205902 + 1
2]120598⊤120598 (9)
where ] is a strictly positive constant and 120598 = w minus wwith w being the optimal weight vector that minimizes theapproximation error 120576 = 119889 minus w⊤120593
Considering that = w the time derivative of 119881 is
(119905) = 120590 + ]minus1120598⊤w
= (119911 minus 119911d + 2120582 119911 + 1205822 119911) 120590 + ]minus1120598⊤w
= [119898minus1 (120572119906 minus 120572120591 + 119889) minus 119911d + 2120582 119911 + 1205822 119911] 120590+ ]minus1120598⊤w
(10)
By applying the control law (7) to (10) becomes
(119905) = minus119898minus1 [(119889 minus 119889) + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [(119889 minus 120576 minus w⊤120593) + 120581 sat(120590120601)]120590+ ]minus1120598⊤w
= minus119898minus1 [120598⊤120593 minus 120576 + 120581 sat(120590120601)]120590 + ]minus1120598⊤w
= minus119898minus1 [120581 sat(120590120601) minus 120576] 120590
+ ]minus1120598⊤ (w minus 119898minus1]120593120590)
(11)
Since both 119898 and ] are strictly positive parameters theycan be combined into a single adaptation rate 120578 = 119898minus1]
Hence by updating w according to
w = 120578120593120590 (12)
the time derivative of 119881 becomes
(119905) = minus119898minus1 [120581 sat(120590120601) minus 120576] 120590 (13)
If the control gain is defined according to 120581 gt 120599 + 120576 with120599 being a strictly positive constant it follows from (6) thatoutside the boundary layer ie when |120590120601| ge 1 becomes
(119905) = minus119898minus1 [120581 sgn (120590) minus 120576] 120590 le minus119898minus1120599 |120590| (14)
Integrating both sides of (14) yields
lim119905997888rarrinfin
int1199050
119898minus1120599 |120590| d120585 le lim119905997888rarrinfin
[119881 (0) minus 119881 (119905)] le 119881 (0)lt infin
(15)
Since the absolute value function is uniformly continu-ous it follows from Barbalatrsquos lemma [41] that the proposedintelligent controller ensures the convergence of the trackingerror to the boundary layer
Moreover considering that |120590120601| lt 1may be rewritten asminus120601 le 120590(z) le 120601 it can be verified that inside the boundarylayer one has
minus120601 le 119911 + 2120582 119911 + 1205822 le 120601 (16)
Multiplying (16) by 119890120582119905 one getminus120601119890120582119905 le d2
d1199052 (119890120582119905) le 120601119890120582119905 (17)
Integrating (17) between 0 and 119905 givesminus120601120582119890120582119905 + 120601
120582 le dd119905 (119890
120582119905) minus dd119905 (119890
120582119905)10038161003816100381610038161003816100381610038161003816119905=0 le120601120582119890120582119905 minus 120601
120582 (18)
or conveniently rewritten as
minus120601120582119890120582119905 minus 1205771 le d
d119905 (119890120582119905) le 120601
120582119890120582119905 + 1205771 (19)
with 1205771 = 120601120582 + 119911(0) + 120582(0) being a constant valueIntegrating (19) between 0 and 119905 yields
minus 1206011205822 119890120582119905 minus 1205771119905 minus 1205770 le 119890120582119905 le 120601
1205822 119890120582119905 + 1205771119905 + 1205770 (20)
with 1205770 = 1206011205822 + (0) also being a constant valueDividing (20) by 119890120582119905 it can be verified for 119905 997888rarr infin that
minus 1206011205822 le le 120601
1205822 (21)
By imposing (21) to (19) and dividing it by 119890120582119905 it followsfor 119905 997888rarr infin that
minus2120601120582 le 119911 le 2120601120582 (22)
8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
-
z> z> z>(z)
w =
minus1[ + m (z> minus 2z minus 2z) minus sat()]
z z z
u
minus1= w⊤d
Figure 4 Block diagram of the intelligent controller
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(a) Gaussian type
0
02
04
06
08
1
i
minus minus4 minus20 minus40 0 40 20 4
(b) Triangular type
Figure 5 Adopted activation functions
Furthermore applying (21) and (22) to (16) gives
minus6120601 le 119911 le 6120601 (23)
Therefore the intelligent controller defined by (7) (8)and (12) ensures the exponential convergence of the trackingerror to the closed region Z = z isin R3||(119894)| le (119894 +1)120582119894minus2120601 119894 = 0 1 2
It is important to note that the adopted approach is intotal agreement with the framework proposed for intelligentcontrol The control law (7) not only yields the requiredrobustness but also accommodates both prior and acquiredinformation A priori knowledge is provided by (4) whichrepresents our knowledge on the plant during the designphase Equation (8) on the other hand gives a posterioriknowledge which stands for everything that is learned onlineby means of the interaction with the environment Finally(12) enables the controller to adapt itself online by adjustingthe weights of the neural network The online nature ofthe proposed adaptation law motivates the adoption oflocally supported activation functions in order to ensure theretention of learned experiences [94] The block diagram ofthe proposed intelligent controller is presented in Figure 4
4 Numerical and Experimental Results
The efficacy of the proposed control scheme is now evaluatedby means of both numerical and experimental investigations
41 Numerical Studies In order to simulate the dynamicbehavior of the diving agent the fourth-order Runge-Kuttamethod is employed for time integration The sampling ratesare 1 kHz for the control system and 10 kHz for the dynamicalmodel Model parameters are assumed as119898 = 038 kg 119898a =007 kg 119888 = 01 Nm2s2 and 120572 = 20Hz Control parametersare set to 120582 = 04 120581 = 01 and 120601 = 2 It should be noted thataccording to (7) neither the added hydrodynamic mass northe quadratic damping is taken into account in the controllaw In this case both hydrodynamic effects are considered asmodeling inaccuracies
Regarding the adopted neural network the weight vectoris initialized as w = 0 and updated at each iterationstep according to (12) The adaptation rate is initially setto 120578 = 1 As depicted in Figure 5 two different types oflocally supported activation functions are here taken intoconsideration Gaussian and Triangular In both cases sevenneurons are adopted in the hidden layer The center ofeach neuron is defined in accordance with the width of theboundary layer
In order to demonstrate the robustness of the proposedintelligent scheme against modeling imprecisions as wellas its almost indifference to the chosen neuron type thecontroller is implemented with bothGaussian and Triangularactivation functions The diving agent is released on thesurface and should dive to a depth of 119911d = 05mTheobtainedresults are presented in Figure 6With the view to facilitate thecomparison with the experimental results the control action
Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 9
0 10 20 30 40 50 60t [s]
ReferenceTriangularGaussian
00
01
02
03
04
05
06
07
z [m
]
(a) Obtained depth
TriangularGaussian
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 6 Depth regulation with both Gaussian and Triangular activation functions 120578 = 1
ReferenceStandardIntelligent
00
01
02
03
04
05
06
07
x [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
0
20
40
60
80
100
120
140C
ontro
l [de
g]
20 10 30 40 50 60 0t [s]
(b) Control action
Figure 7 Depth regulation with both adaptive and intelligent schemes 120578 = 1
is already presented bymeans of the actuation angle which iscomputed according to (1)
As observed in Figure 6 the performance associatedwith the two different types of neurons is quite similar TheGaussian type allows the agent to dive a little faster (seeFigure 6(a)) but at the cost of a slightly larger control actionat the very beginning (see Figure 6(b)) In both cases thecontroller is able to drive the agent to the desired depthregardless of the presence of structured and unstructureduncertainties respectively It is important to note that bysetting w initially to zero the neural network has no priorknowledge about the plant and should learn online and fromscratch how to compensate for modeling inaccuracies
The relevance of the ability to learn can be highlightedby confronting the proposed intelligent approach with anadaptive sliding mode controller For comparison purposes
the intelligent scheme can be easily converted to a purelyadaptive law by adopting a single neuron in the hiddenlayer and defining its activation function according to 120593 =1 Thus by evoking the Euler method the purely adaptivescheme becomes 119889119896+1 larr997888 119889119896 + 120578120590Δ119905 with Δ119905 beingthe sampling period of the controller 119889119896 standing for theestimation at the 119896-th iteration step and 1198890 = 0 Figures 7and 8 present the results obtained respectively with 120578 = 1and 120578 = 5 for both intelligent and adaptive controllersGaussian activation functions are taken into account withinthe intelligent approach
By inspecting Figures 7 and 8 it can be verified that amerely adaptive scheme does not represent the most suitablechoice to cope with unstructured uncertainties Regardless ofthe adopted adaptation rate 120578 = 1 or 120578 = 5 the intelligent
10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Mathematical Problems in Engineering
ReferenceAdaptiveIntelligent
00
01
02
03
04
05
06
07
z [m
]
10 20 30 40 50 60 0t [s]
(a) Obtained depth
AdaptiveIntelligent
10 20 30 40 50 60 0t [s]
0
20
40
60
80
100
120
140
Con
trol [
deg]
(b) Control action
Figure 8 Depth regulation with both adaptive and intelligent schemes 120578 = 5
controller is able to stabilize the agent at the desired depthFigures 7(a) and 8(a) with smooth control actions Figures7(b) and 8(b)The adaptive sliding mode controller howeverpresents an impaired performance for 120578 = 1 Figure 7(a)even considering the successive attempts of the steppermotorto regulate the displaced volume Figure 7(b) Moreover itshould be made clear that the inability of the adaptive controllaw is not amerematter of parameter settings Figure 8 showsthat the increase in the adaptation rate to 120578 = 5 can improvethe capacity of the purely adaptive scheme to stabilize theagent but at the cost of a prohibitive control action Thehigh control activity related to the adaptive scheme (seeFigure 8(b)) would lead to excessive power consumptionby the stepper motor which would compromise the agentrsquosbattery resources In addition repeatedly applied loads mayinduce mechanical failures due to fatigue
The power consumption related to each control schemecan be estimated by means of the angular velocity of themotor Considering that the rotational energy at the motorshaft is proportional to its squared angular velocity the totalenergy spent can be estimated according to
119864 = int119905end0
1205792 d119905 (24)
Table 1 presents the energy expenditure for the adaptiveand intelligent controllers respectively 119864ada and 119864int associ-ated with the adaptation rates evaluated in Figures 7 and 8
According to Table 1 the intelligent approach is muchmore efficient than the merely adaptive scheme Whencompared with the intelligent scheme the energy spent withthe adaptive controller is almost sixty times greater for 120578 = 1and more than a hundred and sixty times greater for for120578 = 5 This is because the adaptive control law lacks theability to learn from past experiences and needs to constantlyadjust itself The intelligent scheme on the other hand hasthe capacity to accommodate knowledge by approximatingthe modeling inaccuracies as a function of sigma On this
0 iterations50 iterations100 iterations500 iterations
1000 iterations5000 iterations10000 iterations
minus015
minus010
minus005
000
005
010 d
000 004 008minus004minus008
Figure 9 Convergence of the neural network with respect to thenumber of iterations 120578 = 5
basis the proposed intelligent controller learns through theiterations how to properly compensate for uncertainties asa function of the distance between the state errors and thesliding manifold The convergence of the neural networkaccording to the iteration step is shown in Figure 9
Considering that the controller has a sampling rate of 1kHz it can be verified in Figure 9 that after 5 seconds ie5000 iterations the output of the neural network convergesto a function of the sliding variable 120590
42 Experimental Validation Now the intelligent controllerdefined by (7) (8) and (12) is experimentally evaluatedThe control scheme was implemented in the Teensy 32microcontroller board following a procedural programmingparadigm in C++ The main loop runs at 40 Hz and consists
Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 11
Table 1 Energy expenditure for both adaptive and intelligent controllers
119864ada 119864int 119864ada119864int
120578 = 1 (Figure 7) 2845 050 5690120578 = 5 (Figure 8) 22724 140 16231
Figure 10 Wave tank at the Institute of Mechanics and Ocean Engineering Hamburg University of Technology
of pressure and temperature sensor queries for determiningwater depth which in turn is used to provide feedback forcontrol command computations and stepper motor actua-tion Data is stored in EEPROM and gathered after eachexperiment using the WiFi module All trials were carriedout in the wave tank of the Institute of Mechanics and OceanEngineering Hamburg University of Technology (Figure 10)
Since the proposed scheme requires the knowledge notonly of the depth but also of the depths first and secondtime derivatives state observers have to be implementedConsidering their appealing finite time convergence property[57] sliding mode observers have been adopted to estimateboth diving velocity and diving acceleration Hence follow-ing Shtessel et al [57] the estimated state 1199092 can be obtainedfrom a known input signal 1199091 according to
1199091 = minus120583 sat(1199091 minus 1199091120595 ) (25)
1199092 = minus120574 [1199092 + 120583 sat(1199091 minus 1199091120595 )] (26)
where 120574 120583 and 120595 are strictly positive parametersHere a cascade implementation of (25) and (26) is used
to estimate and by means of the measured depth 119911The choice of the observer parameters is straightforward andfollows [90] 120574 = 5 120583 = 25 and 120595 = 05 Gerrit [90]evaluates the influence of the parameters on both estimationperformance and convergence time of the observer confirm-ing its robustness to parameter variations and suitability tothe microdiving agent All control parameters are consideredas before Figure 11 shows the experimental evaluation of theproposed intelligent controller for the depth regulation at119911d = 05m
As observed in Figure 11 the intelligent controller isable to stabilize the diving agent at the desired depth witha smooth control action that does not compromise neither
the integrity of its mechanical components nor the batterycapacity
At this point in order to demonstrate the ability ofthe proposed intelligent scheme to allow not only depthregulation but also trajectory tracking the diving agent isset to follow a sinusoidal depth profile This is a very usefulfeature for a sensor platform that is intended to monitorenvironmental values in a liquid column Figure 12 presentsthe experimentally obtained results
By appraising Figure 12 it can be ascertained that theintelligent controller allows the diving agent to track thedesired trajectory even considering that the initial statesand the initial desired states do not match z(0) = zd(0)Moreover as observed in Figure 12(b) the control actionremains smooth throughout the tracking Regarding theadopted sliding mode observer it can be verified that veloci-ties and accelerations respectively (Figures 12(c) and 12(d))are estimated with good confidence Due to the doubledifferentiation process related to the cascade implementationthe estimated acceleration signal becomes slightly noisy(Figure 12(d)) Even though notwithstanding the presenceof noisy signals the proposed controller is able to track thereference (Figure 12(a)) without harming the smoothness ofthe control signal (Figure 12(b))
It should be emphasized that the designed intelligentdepth controller represents an important improvement overour recently proposed scheme which is discussed in [49] Bymeans of the combination of sliding mode control with arti-ficial neural networks the new intelligent depth controllerrsquoscontribution is twofold it provides robustness and enhancesthe learning capacities of the diving agent
Finally a self-organizing mechanism might also beimplemented to automatically set the architecture of theneural network However despite an eventual improvementin tracking performance this would certainly increase thecomputational requirements of the embedded electronicsThus in order to avoid compromising the implementation
12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

12 Mathematical Problems in Engineering
0 20 40 60 80 100 120t [s]
ReferenceExperimental
00
01
02
03
04
05
06
07z
[m]
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
Figure 11 Experimental depth regulation with the intelligent controller 120578 = 5
00
01
02
03
04
05
06
07
08
09
0 20 40 60 80 100 120
z [m
]
t [s]
ReferenceExperimental
(a) Measured depth
0
20
40
60
80
100
120
140
0 20 40 60 80 100 120
Con
trol [
deg]
t [s]
(b) Control action
ReferenceExperimental
minus006
minus004
minus002
000
002
004
006
0 20 40 60 80 100 120t [s]
z[m
s]
(c) Estimated velocity
ReferenceExperimental
minus002
minus001
000
001
002
0 20 40 60 80 100 120t [s]
z[m
s2]
(d) Estimated acceleration
Figure 12 Experimental depth tracking with the intelligent controller 120578 = 5
Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 13
in embedded systems the trade-off between computationalcosts and performance improvement must be taken intoaccount during the design phase of the mechatronic system
5 Concluding Remarks
In this work a framework for the intelligent control ofmechatronic systems is presented We have shown that theintelligent controller derived from this framework is able toemulate the essential traits of natural intelligence namelyrobustness prediction adaptation and learning In order tocomply with these required attributes we propose the designof an intelligent approach by embedding a neural networkwithin the boundary layer of a smooth sliding mode con-troller Thereby the sliding mode method provides a robuststructure to accommodate both a priori and a posterioriknowledge The introduction of a neural network with anonline adaptation scheme allows the controller to learn byinteracting with the environment without the necessity ofoffline training It should be emphasized that the adoption ofonly one input not only simplifies the resulting control lawbutalso avoids the issues related to the curse of dimensionalityBy keeping the complexity low the control scheme is allowedto be employed within the limited embedded hardware ofmost common mechatronic systems All these features havegranted the proposed approach to be taken into considerationwithin the design of a new depth controller for a divingagent By means of numerical and experimental results ithas been demonstrated that the designed control law cancope with a plant subject to large unstructured uncertaintiesincomplete information and noisy input signals In view ofthe robustness prediction adaptation and learning capaci-ties granted by the combination of artificial neural networkswith sliding mode control the resulting intelligent schemeprovides a stronger improved tracking performance over apurely adaptive one and allows power consumption at about98 lower
Data Availability
The experimental data used to support the findings of thisstudy are available from the corresponding author uponrequest
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the Alexander von HumboldtFoundation [32-BRA1159879 STPCAPES] the BrazilianCoordination for the Improvement of Higher EducationPersonnel [BEX 813614-9] the Brazilian National Councilfor Scientific and Technological Development [3084292017-6] and the German Research Foundation [Kr75233-1Kr75236-1]
References
[1] M Akbarzadeh-T K Kumbla E Tunstel and M JamshidildquoSoft computing for autonomous robotic systemsrdquo Computersamp Electrical Engineering vol 26 no 1 pp 5ndash32 2000
[2] P J Antsaklis K M Passino and S J Wang ldquoTowardsintelligent autonomous control systems Architecture and fun-damental issuesrdquo Journal of Intelligent amp Robotic Systems vol 1no 4 pp 315ndash342 1989
[3] M Jamshidi ldquoTools for intelligent control fuzzy controllersneural networks and genetic algorithmsrdquo Philosophical Trans-actions of the Royal Society A Mathematical Physical amp Engi-neering Sciences vol 361 no 1809 pp 1781ndash1808 2003
[4] M Boukens andA Boukabou ldquoDesign of an intelligent optimalneural network-based tracking controller for nonholonomicmobile robot systemsrdquo Neurocomputing vol 226 pp 46ndash572017
[5] J M Larrazabal and M S Penas ldquoIntelligent rudder control ofan unmanned surface vesselrdquo Expert Systems with Applicationsvol 55 pp 106ndash117 2016
[6] X Lu Y Zhao and M Liu ldquoSelf-learning interval type-2 fuzzyneural network controllers for trajectory control of a Deltaparallel robotrdquo Neurocomputing vol 283 pp 107ndash119 2018
[7] A Mai and S Commuri ldquoIntelligent control of a prostheticankle joint using gait recognitionrdquoControl Engineering Practicevol 49 pp 1ndash13 2016
[8] L Hu R Li T Xue and Y Liu ldquoNeuro-adaptive trackingcontrol of a hypersonic flight vehicle with uncertainties usingreinforcement synthesisrdquoNeurocomputing vol 285 pp 141ndash1532018
[9] S Li L Ding H Gao C Chen Z Liu and Z DengldquoAdaptive neural network tracking control-based reinforcementlearning for wheeledmobile robots with skidding and slippingrdquoNeurocomputing vol 283 pp 20ndash30 2018
[10] D Wang H He and D Liu ldquoIntelligent Optimal Control WithCritic Learning for a Nonlinear Overhead Crane Systemrdquo IEEETransactions on Industrial Informatics vol 14 no 7 pp 2932ndash2940 2018
[11] C Lucas D Shahmirzadi and N Sheikholeslami ldquoIntroducingBELBIC brain emotional learning based intelligent controllerrdquoIntelligent Automation and Soft Computing vol 10 no 1 pp 11ndash22 2004
[12] E Lotfi and A A Rezaee ldquoGeneralized BELBICrdquo NeuralComputing and Applications
[13] X Wang X Yin and F Shen ldquoRobust adaptive neural trackingcontrol for a class of nonlinear systems with unmodeleddynamics using disturbance observerrdquo Neurocomputing vol292 pp 49ndash62 2018
[14] X Lin H Dong and X Yao ldquoTuning function-based adaptivebackstepping fault-tolerant control for nonlinear systems withactuator faults andmultiple disturbancesrdquoNonlinear Dynamicsvol 91 no 4 pp 2227ndash2239 2018
[15] H Gao Y Song and C Wen ldquoBackstepping design of adaptiveneural fault-tolerant control for MIMO nonlinear systemsrdquoIEEE Transactions on Neural Networks and Learning Systemsvol 28 no 11 pp 2605ndash2613 2017
[16] D Li Y Liu S Tong C L Chen and D Li ldquoNeural Networks-Based Adaptive Control for Nonlinear State Constrained Sys-tems With Input Delayrdquo IEEE Transactions on Cybernetics pp1ndash10
[17] H Wang W Sun and P X Liu ldquoAdaptive Intelligent Controlof Nonaffine Nonlinear Time-Delay Systems With Dynamic
14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

14 Mathematical Problems in Engineering
Uncertaintiesrdquo IEEE Transactions on Systems Man and Cyber-netics Systems vol 47 no 7 pp 1474ndash1485 2017
[18] W Si X Dong and F Yang ldquoAdaptive neural prescribedperformance control for a class of strict-feedback stochasticnonlinear systems with hysteresis inputrdquo Neurocomputing vol251 pp 35ndash44 2017
[19] H Li L Wang and H Du ldquoAdaptive fuzzy backsteppingtracking control for strict-feedback systems with input delayrdquoIEEE Transactions on Fuzzy Systems 2016
[20] X Zhang X Liu and Y Li ldquoAdaptive fuzzy tracking control fornonlinear strict-feedback systems with unmodeled dynamicsvia backstepping techniquerdquoNeurocomputing vol 235 pp 182ndash191 2017
[21] H Su T Zhang andWZhang ldquoFuzzy adaptive control for SISOnonlinear uncertain systems based on backstepping and small-gain approachrdquo Neurocomputing vol 238 pp 212ndash226 2017
[22] L A Vazquez F Jurado C E Castaneda and V SantibanezldquoReal-Time Decentralized Neural Control via Backsteppingfor a Robotic Arm Powered by Industrial Servomotorsrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 2 pp 419ndash426 2018
[23] W Chang S Tong and Y Li ldquoAdaptive fuzzy backsteppingoutput constraint control of flexible manipulator with actuatorsaturationrdquo Neural Computing and Applications vol 28 no S1pp 1165ndash1175 2017
[24] B Baigzadehnoe Z Rahmani A Khosravi and B Rezaie ldquoOnpositionforce tracking control problem of cooperative robotmanipulators using adaptive fuzzy backstepping approachrdquo ISATransactions vol 70 pp 432ndash446 2017
[25] J Niu F Chen and G Tao ldquoNonlinear fuzzy fault-tolerantcontrol of hypersonic flight vehicle with parametric uncertaintyand actuator faultrdquoNonlinear Dynamics vol 92 no 3 pp 1299ndash1315 2018
[26] G Ma C Chen Y Lyu and Y Guo ldquoAdaptive Backstepping-Based Neural Network Control for Hypersonic Reentry VehicleWith Input Constraintsrdquo IEEE Access vol 6 pp 1954ndash19662018
[27] X Cao P Shi Z Li and M Liu ldquoNeural-Network-BasedAdaptive Backstepping Control With Application to SpacecraftAttitude Regulationrdquo IEEE Transactions on Neural Networksand Learning Systems vol 29 no 9 pp 4303ndash4313 2018
[28] Y Pan T Sun Y Liu and H Yu ldquoComposite learning fromadaptive backstepping neural network controlrdquo Neural Net-works vol 95 pp 134ndash142 2017
[29] Y Hou and S Tong ldquoCommand filter-based adaptive fuzzybackstepping control for a class of switched nonlinear systemsrdquoFuzzy Sets and Systems vol 314 pp 46ndash60 2017
[30] B Song and J K HedrickDynamic Surface Control of UncertainNonlinear Systems An LMI Approach Springer London UK2011
[31] X Liu C Yang Z Chen MWang and C Su ldquoNeuro-adaptiveobserver based control of flexible joint robotrdquoNeurocomputing2017
[32] B Xu and F Sun ldquoComposite intelligent learning control ofstrict-feedback systemswith disturbancerdquo IEEETransactions onCybernetics vol PP no 99 pp 1ndash12 2017
[33] X Shi C Lim P Shi and S Xu ldquoAdaptive Neural DynamicSurface Control for Nonstrict-Feedback Systems With OutputDead Zonerdquo IEEE Transactions on Neural Networks and Learn-ing Systems vol 29 no 11 pp 5200ndash5213 2018
[34] T ZhangNWangQWang andY Yi ldquoAdaptive neural controlof constrained strict-feedback nonlinear systems with inputunmodeled dynamicsrdquo Neurocomputing vol 272 pp 596ndash6052018
[35] T Zhang M Xia Y Yi and Q Shen ldquoAdaptive NeuralDynamic Surface Control of Pure-Feedback Nonlinear SystemsWith Full State Constraints and Dynamic Uncertaintiesrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 47no 8 pp 2378ndash2387 2017
[36] M Wang and C Wang ldquoLearning from adaptive neuraldynamic surface control of strict-feedback systemsrdquo IEEETransactions on Neural Networks and Learning Systems vol 26no 6 pp 1247ndash1259 2015
[37] H Dong S Gao B Ning T Tang Y Li and K P ValavanisldquoError-Driven Nonlinear Feedback Design for Fuzzy AdaptiveDynamic Surface Control of Nonlinear Systems With Pre-scribed Tracking Performancerdquo IEEE Transactions on SystemsMan and Cybernetics Systems pp 1ndash11
[38] Y Cui H Zhang Q Qu and C Luo ldquoSynthetic adaptive fuzzytracking control for MIMO uncertain nonlinear systems withdisturbance observerrdquo Neurocomputing vol 249 pp 191ndash2012017
[39] N Wang S Tong and Y Li ldquoObserver-based adaptive fuzzydynamic surface control of non-linear non-strict feedbacksystemrdquo IET Control Theory amp Applications vol 11 no 17 pp3115ndash3121 2017
[40] X Zhang Z Xu C Su et al ldquoFuzzy Approximator BasedAdaptive Dynamic Surface Control for Unknown Time DelayNonlinear Systems With Input Asymmetric Hysteresis Nonlin-earitiesrdquo IEEE Transactions on Systems Man and CyberneticsSystems vol 47 no 8 pp 2218ndash2232 2017
[41] J-J E Slotine and W Li Applied Nonlinear Control PrenticeHall New Jersey 1991
[42] B Rahmani andM Belkheiri ldquoAdaptive neural network outputfeedback control for flexible multi-link robotic manipulatorsrdquoInternational Journal of Control pp 1ndash15 2018
[43] C Lin T S Li and C Chen ldquoFeedback linearization andfeedforward neural network control with application to twinrotor mechanismrdquo Transactions of the Institute of Measurementand Control vol 40 no 2 pp 351ndash362 2016
[44] K Shojaei and M M Arefi ldquoOn the neuro-adaptive feedbacklinearising control of underactuated autonomous underwatervehicles in three-dimensional spacerdquo IET Control Theory ampApplications vol 9 no 8 pp 1264ndash1273 2015
[45] J Fang R Yin and X Lei ldquoAn adaptive decoupling control forthree-axis gyro stabilized platform based on neural networksrdquoMechatronics vol 27 pp 38ndash46 2015
[46] N Nikdel and M A Badamchizadeh ldquoDesign and implemen-tation of neural controllers for shape memory alloyndashactuatedmanipulatorrdquo Journal of Intelligent Material Systems and Struc-tures vol 26 no 1 pp 20ndash28 2014
[47] M Moradi and H Malekizade ldquoNeural network identificationbased multivariable feedback linearization robust control for atwo-link manipulatorrdquo Journal of Intelligent amp Robotic Systemsvol 72 no 2 pp 167ndash178 2013
[48] J M Fernandes M C Tanaka R C Freire Junior and W MBessa ldquoFeedback Linearization with a Neural Network BasedCompensation Schemerdquo in Intelligent Data Engineering andAutomated Learning - IDEAL 2012 vol 7435 of Lecture Notesin Computer Science pp 594ndash601 Springer Berlin HeidelbergBerlin Heidelberg 2012
Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 15
[49] W M Bessa E Kreuzer J Lange M Pick and E SolowjowldquoDesign and Adaptive Depth Control of a Micro Diving AgentrdquoIEEE Robotics and Automation Letters vol 2 no 4 pp 1871ndash1877 2017
[50] Y Zhang G Tao andM Chen ldquoRelative Degrees and AdaptiveFeedback Linearization Control of TndashS Fuzzy Systemsrdquo IEEETransactions on Fuzzy Systems vol 23 no 6 pp 2215ndash22302015
[51] G Li B Li D Wu J Du and G Yang ldquoFeedback linearization-based self-tuning fuzzy proportional integral derivative controlfor atmospheric pressure simulatorrdquo Proceedings of the Insti-tution of Mechanical Engineers Part I Journal of Systems andControl Engineering vol 228 no 6 pp 385ndash392 2014
[52] M C Tanaka J M de Macedo Fernandes and W M BessaldquoFeedback linearization with fuzzy compensation for uncertainnonlinear systemsrdquo International Journal of Computers Com-munications amp Control vol 80 no 5 pp 736ndash743 2013
[53] Y Soufi S Kahla and M Bechouat ldquoFeedback linearizationcontrol based particle swarm optimization formaximumpowerpoint tracking of wind turbine equipped by PMSG connected tothe gridrdquo International Journal of Hydrogen Energy vol 41 no45 pp 20950ndash20955 2016
[54] J O Pedro M Dangor O A Dahunsi and M M Ali ldquoIntel-ligent feedback linearization control of nonlinear electrohy-draulic suspension systems using particle swarm optimizationrdquoApplied Soft Computing vol 24 pp 50ndash62 2014
[55] J L Chen and W Chang ldquoFeedback linearization control ofa two-link robot using a multi-crossover genetic algorithmrdquoExpert Systems with Applications vol 36 no 2 pp 4154ndash41592009
[56] X H Yu and O Kaynak ldquoSliding-mode control with soft com-puting a surveyrdquo IEEE Transactions on Industrial Electronicsvol 56 no 9 pp 3275ndash3285 2009
[57] Y Shtessel C Edwards L Fridman andA Levant SlidingModeControl and Observation Springer New York NY USA 2014
[58] W M Bessa ldquoSome remarks on the boundedness and conver-gence properties of smooth sliding mode controllersrdquo Interna-tional Journal of Automation and Computing vol 6 no 2 pp154ndash158 2009
[59] X Yu and O Kaynak ldquoSliding Mode Control Made SmarterA Computational Intelligence Perspectiverdquo IEEE Systems Manand Cybernetics Magazine vol 3 no 2 pp 31ndash34 2017
[60] W M Bessa and R S Barreto ldquoAdaptive fuzzy sliding modecontrol of uncertain nonlinear systemsrdquo Sba Controle ampAutomacao Sociedade Brasileira de Automatica vol 21 no 2pp 117ndash126 2010
[61] W M Bessa M S Dutra and E Kreuzer ldquoDepth control ofremotely operated underwater vehicles using an adaptive fuzzyslidingmode controllerrdquoRobotics andAutonomous Systems vol56 no 8 pp 670ndash677 2008
[62] W M Bessa M S Dutra and E Kreuzer ldquoAn adaptivefuzzy slidingmode controller for remotely operated underwatervehiclesrdquo Robotics and Autonomous Systems vol 58 no 1 pp16ndash26 2010
[63] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of smart structuresrdquo The European Physical JournalSpecial Topics vol 222 no 7 pp 1541ndash1551 2013
[64] W Bessa A de Paula andM Savi ldquoAdaptive fuzzy slidingmodecontrol of a chaotic pendulum with noisy signalsrdquo ZAMM -Journal of Applied Mathematics and Mechanics Zeitschrift furAngewandte Mathematik und Mechanik vol 94 no 3 pp 256ndash263 2014
[65] W M Bessa M S Dutra and E Kreuzer ldquoSliding modecontrol with adaptive fuzzy dead-zone compensation of anelectro-hydraulic servo-systemrdquo Journal of Intelligent amp RoboticSystems vol 58 no 1 pp 3ndash16 2010
[66] F Scarselli andA Chung Tsoi ldquoUniversal ApproximationUsingFeedforward Neural Networks A Survey of Some ExistingMethods and Some New Resultsrdquo Neural Networks vol 11 no1 pp 15ndash37 1998
[67] J E Azzaro and R A Veiga ldquoSliding mode controller with neu-ral network identificationrdquo IEEE Latin America Transactionsvol 13 no 12 pp 3754ndash3757 2015
[68] J Fei and C Lu ldquoAdaptive fractional order sliding mode con-troller with neural estimatorrdquo Journal of The Franklin Institutevol 355 no 5 pp 2369ndash2391 2018
[69] J Fei and C Lu ldquoAdaptive sliding mode control of dynamicsystems using double loop recurrent neural network structurerdquoIEEE Transactions on Neural Networks and Learning Systemsvol 29 no 4 pp 1275ndash1286 2017
[70] H Zhang Q Qu G Xiao and Y Cui ldquoOptimal GuaranteedCost Sliding Mode Control for Constrained-Input NonlinearSystems With Matched and Unmatched Disturbancesrdquo IEEETransactions on Neural Networks and Learning Systems vol 29no 6 pp 2112ndash2126 2018
[71] N Wiener Cybernetics Or Control and Communication in theAnimal and the Machine John Wiley amp Sons Inc New YorkUSA 1948
[72] R Pfeifer and C ScheierUnderstanding Intelligence MIT PressCambridge MA USA 2001
[73] A Binet and T Simon The Development of Intelligence inChildren Williams ampWilkins Baltimore 1916
[74] R Sternberg Beyond IQ A Triarchic Theory of Human Intelli-gence Cambridge University Press New York 1985
[75] H Roy K Dare and M Ibba ldquoAdaptation of the bacterialmembrane to changing environments using aminoacylatedphospholipidsrdquo Molecular Microbiology vol 71 no 3 pp 547ndash550 2009
[76] R DawkinsThe Selfish Gene Oxford University Press OxfordUK 1976
[77] W F Dearborn ldquoIntelligence and Its Measurement ASymposiumndashXIIrdquo Journal of Educational Psychology vol 12no 4 pp 210ndash212 1921
[78] D O Hebb The Organization of Behavior John Wiley amp SonsInc New York 1949
[79] D M Wolpert ldquoComputational approaches to motor controlrdquoTrends in Cognitive Sciences vol 1 no 6 pp 209ndash216 1997
[80] S J Blakemore S J Goodbody and D MWolpert ldquoPredictingthe consequences of our own actions the role of sensorimotorcontext estimationrdquoThe Journal of Neuroscience vol 18 no 18pp 7511ndash7518 1998
[81] G Edwards P Vetter F McGruer L S Petro and L MucklildquoPredictive feedback to V1 dynamically updates with sensoryinputrdquo Scientific Reports vol 7 no 1 2017
[82] R R Llinas I of the Vortex FromNeurons to SelfTheMITPressCambridge MA USA 2001
[83] R R Llinas and S Roy ldquoThe rsquoprediction imperativersquo as thebasis for self-awarenessrdquo Philosophical Transactions of the RoyalSociety B Biological Sciences vol 364 no 1521 pp 1301ndash13072009
[84] A Roberts and K Tregonning ldquoThe robustness of naturalsystemsrdquo Nature vol 288 no 5788 pp 265-266 1980
16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

16 Mathematical Problems in Engineering
[85] H Kitano ldquoBiological robustnessrdquoNature Reviews Genetics vol5 no 11 pp 826ndash837 2004
[86] A Schuster Robust Intelligent Systems Springer London 2008[87] J S Jaffe P J Franks P L Roberts et al ldquoA swarm of
autonomous miniature underwater robot drifters for exploringsubmesoscale ocean dynamicsrdquoNature Communications vol 8p 14189 2017
[88] R W Coutinho A Boukerche L F Vieira and A A LoureiroldquoGeographic and opportunistic routing for underwater sen-sor networksrdquo Institute of Electrical and Electronics EngineersTransactions on Computers vol 65 no 2 pp 548ndash561 2016
[89] J dos Santos and W Bessa ldquoIntelligent control for accurateposition tracking of electrohydraulic actuatorsrdquo IEEE Electron-ics Letters
[90] G Brinkmann Machine learning for robot control ndash Conceptdevelopment and realization of a dive agent Master thesis Insti-tute ofMechanics andOcean Engineering HamburgUniversityof Technology 2017
[91] G Brinkmann W M Bessa D Duecker E Kreuzer andE Solowjow ldquoReinforcement Learning of Depth Stabilizationwith a Micro Diving Agentrdquo in Proceedings of the 2018 IEEEInternational Conference on Robotics and Automation (ICRA)pp 1ndash7 Brisbane QLD May 2018
[92] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons Inc Chichester 1994
[93] R Bellman Adaptive Control Processes A Guided Tour Prince-ton University Press New Jersey NJ USA 1961
[94] J A Farrell and M M Polycarpou Adaptive ApproximationBased Control Unifying Neural Fuzzy and Traditional AdaptiveApproximation Approaches Wiley Hoboken NJ USA 2006
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom