Embed Size (px)
Citation preview

A catalogue of stable equilibria of planar extensible or inextensible
elastic rods for all possible Dirichlet boundary conditions
Robert S. Manning∗
May 17, 2013
Abstract
We catalogue configurations that locally minimize energy for a planar elastic rod (extensible-shearable or inextensible-unshearable) subject to arbitrary Dirichlet boundary conditions in positionand orientation. Via a combination of analysis and computation, we determine several bifurcationsurfaces in the 3-parameter space of boundary conditions and explore how they depend on the rodmaterial parameters, including in the inextensible limit. For each possible boundary condition, we findall stable equilibria with sufficiently low energy that they might be competitive within a Boltzmanndistribution if the rod were used to model DNA with tens or hundreds of base pairs, the length-scalerelevant for DNA looping. Depending on the boundary conditions, there are as many as three suchequilibria.
Keywords: planar elastic rod, bifurcation analysis, parameter continuation, extensible and shearable rod,inextensible limit, conjugate point stability theory, Dirichlet boundary conditionsMSC codes: 74K10 (primary), 74G60 (primary), 74S30, 49K15, 34B08, 34B60
1 Introduction
The problem of finding equilibrium configurations of an elastic rod has a long history dating back at leastas far as Euler. The condition of equilibrium depends not merely on the model chosen for the materialparameters of the rod, but also on the choice of boundary conditions, be they Dirichlet (as in a “clamped”end), Neumann (as in a “pinned” end), or some other form relevant to a particular application. Herewe focus on the simplest material parameters (a planar rod with quadratic energy in the strains andno self-contact effects) and aim to give a complete account of the equilibria for all possible Dirichletboundary conditions.
This choice is motivated in part by an interest in the problem of DNA “looping”, the process wherebya protein binds to a piece of DNA at two sites separated by tens to hundreds of basepairs and thus deformsthe DNA [25]. Hence, the protein imposes boundary conditions on the DNA segment between the bindingsites1. There are examples of proteins providing quite a wide range of boundary conditions, e.g., the lacand gal systems are thought to simultaneously permit roughly (but not exactly) parallel or antiparallel
∗Mathematics Department; Haverford College; Haverford, PA 19041 ([email protected])1If the binding protein is rigid, then it is plausible to model the protein as Dirichlet boundary conditions. If one assumes
substantial protein flexibility, then the problem is more complicated but the results for Dirichlet boundary conditions maystill be exploited, as was done in [28].
1

boundary conditions [26, 28, 23, 31], so that a thorough study of all Dirichlet boundary conditions willbe a valuable addition to the modeling of DNA looping. Our study also applies to DNA “cyclization”, inwhich two ends of a DNA segment bind to each other, including cases of DNA cyclization in the presenceof single-site binding by a protein that induces a kink in the DNA.
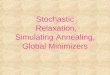
DNA looping is, of course, a three-dimensional process, whereas here we only consider planar rods.In part this is a matter of practicality: the all-Dirichlet-boundary-condition problem in 2D involves threeparameters whereas the corresponding 3D problem involves six. Beyond this pragmatic reason, however,it seems plausible that the 2D problem contains many of the key qualitative phenomena that appear inthe 3D problem. For example, the 2D problem involves two displacement boundary conditions: a heightand a lateral displacement of one end relative to the other (where the “height”/“lateral” distinction isdefined by choosing coordinate axes centered at one end of the rod with the z or “height” axis alignedwith the rod frame at that end; see Fig. 1). Moving to the 3D problem adds a second lateral displacementboundary condition, which should behave similarly to the lateral boundary condition present in the 2Dproblem (indeed, there is circular symmetry about the z-axis). Similarly, the 2D problem involves a singleorientation boundary condition (the angle between the frames at the two ends), and moving to the 3Dproblem adds a second orientation boundary condition that should behave similarly.
This is not to say that our study stands in for a careful study of the 3D problem; indeed, we see it asa prelude to that next study, hopefully providing a useful skeleton for what happens when the additionalparameters are introduced. (Note also that the twist boundary condition present in 3D has no analoguein our 2D study.) Furthermore, the 2D problem proves to be mathematically rich, involving severalbifurcation phenomena that presumably are present in the 3D problem as well, but more easily depictedand analyzed in the 2D setting.
Along with finding equilibria, we also determine their stability (in the sense of whether they arelocal minimizers of the elastic energy) using conjugate point tools from the calculus of variations. Weaim throughout to catalogue all stable equilibria. In addition, since our numerical strategy is parametercontinuation, we also explore some unstable equilibria (saddle points on the energy hypersurface), espe-cially those that connect branches of stable equilibria as boundary condition parameters are continuouslyvaried. We emphasize that since our problem setting is 2D, the notion of stability is explicitly 2D aswell, i.e., any configurations we determine to be stable are only local minimizers of the elastic energywhen compared to neighbors that are also planar; some of these planar equilibria will be stable in a3D rod setting, but some will not. Our computations do not determine which are stable in this morerobust sense, though note the results of Maddocks [16] related to stability with respect to in-plane andout-of-plane deformations, and of course one could apply the 3D conjugate point theory to those planarequilibria computed here.
We note that some solution branches are infinitely long, so our numerical computations can not explorethem in full. In these cases, we truncate the numerical computations when they reach some energy cutoff,and we set that cutoff generously so as to include any configuration that would be plausibly competitivewithin a Boltzman distribution given stiffnesses relevant for the DNA looping application (see discussionin Sec. 5 for details). Furthermore, the pattern of stability up to our chosen cutoff suggests that thereare not higher-energy stable configurations that are missed by this truncation. Said another way, givenany stable configuration with lowest or second-lowest energy for some choice of boundary conditions, wefollow by parameter continuation its behavior for all other boundary conditions.
We consider both extensible-shearable and inextensible-unshearable rods, as well as how the results forthe extensible case asymptote to those for the inextensible case in an appropriate limit. The inextensible
2

case is, in some sense, simpler, e.g., its one material parameter (bending stiffness) can be scaled away,whereas the extensible rod results depend on the ratios of shear and stretch stiffness to the bendingstiffness. On the other hand, the inextensible problem can attain only certain boundary conditions, andnumerical problems arise near the boundary of the attainable region. At the length scales relevant tolooping, DNA does not appear to be significantly extensible or shearable, so we focus our study towardthe inextensible and nearly-inextensible cases, though in Sec. 4.1 in particular, we explore how somefeatures of our results vary as we introduce substantial extensibility and shearability.
The global bifurcation analysis we present is in the same spirit as van der Heijden et al [29], Hendersonand Neukirch [8], several works of Domokos and collaborators [5, 3, 9, 10, 4], and Healey and Papadopoulos[7]. However, these studies considered quite different boundary conditions (parallel frame vectors wereassumed in [3, 29, 8, 9, 7], pinned-pinned conditions were assumed in [10], and none of the studiesconsidered lateral displacement boundary conditions) and different elastic rod models (all are inextensibleexcept for [7] which incorporates extensibility within a “hemitropic” energy function, and many of thesestudies focus on the role of one or more extra features: self-contact [3, 29], a potential field [9] or twoparallel constraining plates [10]).
The paper is organized as follows. Sec. 2 contains the formulation of the extensible-shearable andinextensible-unshearable elastic rods. Then we build up results by adding one parameter at a time. First,in Sec. 3, we consider the height-displacement parameter, i.e., we consider clamped-clamped bucklingwith the two ends of the rod and their tangent vectors all lying on the same line; some of these resultsrecreate classic Euler buckling, but we also derive results about the buckling load for the extensibleproblem and delve into the bifurcation structure of large-buckling configurations, including those withnegative “heights”. Then in Sec. 4, we introduce the lateral displacement parameter, i.e., we considerall configurations with parallel tangent vectors at the two ends but arbitrary displacement betweenthe two ends; these results include the numerical determination of curves of pitchfork and saddle-nodebifurcations and their dependence on the rod material parameters. Finally, in Sec. 5, we introduce theremaining boundary condition, the relative angle between the frames at the two ends.
2 Formulation of the Planar Elastic Rod and Energy Minimization
2.1 Rod Model
2.1.1 Extensible-shearable case
We define a planar rod to be a smooth framed curve in R2, a planar curve such that each point on thecurve has an associated “frame” of orthonormal vectors (d1,d3) (which need not have any particularrelationship to the curve at that point); see Fig. 1. It is convenient to describe the frame by a singleorientation angle θ, with the convention that d1 = (cos θ,− sin θ) and d3 = (sin θ, cos θ). We parametrizeby the arclength s of the undeformed rod, with the position of the curve denoted by r(s) = (x(s), z(s)),and the orientation angle by θ(s). We assume that the functions x(·), z(·), θ(·) are C2.
We define the (unitless) shear and stretch strains by:
v1 = r′ · d1 = x′ cos θ − z′ sin θ, (1)
v3 = r′ · d3 = x′ sin θ + z′ cos θ. (2)
This setup and notation is designed to be the planar restriction of a standard formulation of a 3D rod,
3

0 0.5
0
0.5
1
d1(0)
d3(0)
d3(1)
d1(1)
r(0)
r(1)
e(s)
x
z
Figure 1: Notation for planar elastic rod
4

where the frame gives the orientation of the rod cross-section (and there is an additional space coordinatey and an additional shear strain v2).
For this article, we consider an energy functional corresponding to a uniform rod whose undeformedstate is straight with its frames aligned with the rod at every point:
E[θ, x, z] =1
2
∫ L
0
[K(θ′(s))2 +A1(v1(s))
2 +A3(v3(s)− 1)2]ds.
The positive parameters K, A1, and A3 are “stiffnesses”: K for bending (with units of energy timesdistance), A1 for shearing (with units of energy over distance), and A3 for stretching or compression(same units as A1). Note that we make the simplifying assumptions that the energy is quadratic in thestrains (which is presumably the leading order behavior for small deformations) and that the stiffnessmatrix is diagonal, ignoring effects like shear-bend coupling.
We non-dimensionalize, measuring length in units of L and energy in units of K/L, arriving at theenergy functional:
E[θ, x, z] =1
2
∫ 1
0
[(θ′(s))2 +A1(v1(s))
2 +A3(v3(s)− 1)2]ds. (3)
By choosing coordinates appropriately, we may assume that x(0) = 0, z(0) = 0, and θ(0) = 0. We seekthe lowest-energy local minimizers of E for arbitrary fixed values of x(1), z(1), and θ(1).
2.1.2 Inextensible-Unshearable case
The inextensible-unshearable model assumes a specific connection between the curve and the frame:v1 = 0, v3 = 1. Thus, the functions x(s) and z(s) can be determined from the single unknown functionθ(s) via the constraints x′ = sin θ, z′ = cos θ. The energy functional reduces to
E[θ] =1
2
∫ 1
0(θ′(s))2ds.
2.2 Euler-Lagrange equations
2.2.1 Extensible-Shearable case
Next we consider the first-order necessary conditions for a critical point of the functional (3); these arethe Euler-Lagrange equations for a functional of the form
∫ 10 L(θ, θ′, x, x′, z, z′)ds:
0 =d
ds
[∂L
∂θ′
]− ∂L
∂θ= θ′′ +A1v1v3 −A3v1(v3 − 1),
0 =d
ds
[∂L
∂x′
]− ∂L
∂x=
d
ds[A1v1 cos θ +A3(v3 − 1) sin θ] ,
0 =d
ds
[∂L
∂z′
]− ∂L
∂z=
d
ds[−A1v1 sin θ +A3(v3 − 1) cos θ] .
The last two equations imply the existence of constants C1 and C2 so that
C1 = A1v1 cos θ +A3(v3 − 1) sin θ,
C2 = −A1v1 sin θ +A3(v3 − 1) cos θ,(4)
5

which can be rearranged to yield:
A1v1 = C1 cos θ − C2 sin θ, A3(v3 − 1) = C1 sin θ + C2 cos θ. (5)
Next, we substitute the expressions (1) and (2) for v1 and v3 into (4), to get
C1 +A3 sin θ = (A1 cos2 θ +A3 sin2 θ)x′ + (A3 −A1) cos θ sin θ z′,
C2 +A3 cos θ = (A3 −A1) cos θ sin θ x′ + (A1 sin2 θ +A3 cos2 θ)z′,
and by matrix inversion, we find differential equations for x and z:[x′
z′
]=
[1A1
cos2 θ + 1A3
sin2 θ A1−A3A1A3
cos θ sin θA1−A3A1A3
cos θ sin θ 1A1
sin2 θ + 1A3
cos2 θ
] [C1 +A3 sin θC2 +A3 cos θ
]. (6)
For convenience, we rewrite the second-order Euler-Lagrange equation for θ as a first-order system andapply (5) to arrive at
θ′ = pθ,
p′θ = −A1v1v3 +A3v1(v3 − 1)
= −v3 (C1 cos θ − C2 sin θ) + v1 (C1 sin θ + C2 cos θ)
= − (C1 cos θ − C2 sin θ)
(C1 sin θ + C2 cos θ
A3+ 1
)+ (C1 sin θ + C2 cos θ)
C1 cos θ − C2 sin θ
A1.
(7)
Thus the Euler-Lagrange equations are equivalent to the system of first-order differential equations givenby Eqs. (6) and (7) for the unknown functions x(·), z(·), θ(·), and pθ(·).
2.2.2 Inextensible-Unshearable case
In this case, any desired boundary conditions x(1) = α and z(1) = β can be used to convert therelationships x′ = sin θ and z′ = cos θ into isoperimetric constraints
∫ 10 sin θ(s)ds = α and
∫ 10 cos θ(s)ds =
β, and then the Euler-Lagrange equations involve corresponding Lagrange multipliers (cf. classic texts inthe calculus of variations such as [6]). The resulting equations are simply Eq. (7) from the extensible-shearable case in the limit that A1, A3 → ∞ (which intuitively is the inextensible-unshearable limit),with C1, C2 filling the role of Lagrange multipliers.
2.2.3 Numerical approach to solving Euler-Lagrange equations
The Euler-Lagrange differential equations (in either the extensible or inextensible case) can be solved inclosed form via elliptic functions (see, e.g., §262-263 of [15]), but that does not address the question posedhere of the solutions to the boundary value problem, including the question of the number of solutionsfor any particular boundary conditions. Rather than exploit the closed-form solutions (as was done,for example, for the inextensible case, in [27, 21]), we use instead the parameter-continuation softwarepackage AUTO2, which is specialized to give accurate and efficient solutions to boundary value problemsand allow detection of fold points and bifurcation points along a continuation branch.
2http://www.ma.hw.ac.uk/~gabriel/auto07/auto.html
6

2.3 Classification of Critical Points as Local Minimizers
2.3.1 Extensible-Shearable case
After solving (6) and (7) to identify critical points of E, we seek to identify which critical points corre-spond to local minima of E. Classical results developed by Jacobi, Legendre, Morse and others classifycritical points by assigning a non-negative integer called an index, the dimension of the space of allowed“variations” ζ = (ζθ, ζx, ζz) on which the second variation δ2E[ζ] is negative (see [19] for the index theory,or any standard text such as [6] for the simpler Jacobi condition, which distinguishes index-zero frompositive-index). This second variation can be written in the form δ2E[ζ] = 1
2
∫ 10 ζT (Sζ) ds, where S is the
second-order differential operator Sζ = − dds(Pζ
′+CT ζ) +Cζ′+Qζ, with the (potentially s-dependent)coefficient matrices
P =∂2L
∂(q′)2=
1 0 00 A1 cos2 θ +A3 sin2 θ (A3 −A1) cos θ sin θ0 (A3 −A1) cos θ sin θ A1 sin2 θ +A3 cos2 θ
,CT =
∂2L
∂q′∂q=
0 0 0−A1v3 cos θ −A1v1 sin θ +A3(v3 − 1) cos θ +A3v1 sin θ 0 0A1v3 sin θ −A1v1 cos θ −A3(v3 − 1) sin θ +A3v1 cos θ 0 0
,Q =
∂2L
∂(q)2=
A1(v3)2 −A1(v1)
2 −A3v3(v3 − 1) +A3(v1)2 0 0
0 0 00 0 0
,each evaluated at the critical point. (Note the shorthand q = (θ, x, z).)
A conjugate point is any σ ∈ (0, 1) such that the system Sζ = 0, ζ(0) = 0, ζ(σ) = 0 has a nontrivialsolution, and the number of conjugate points is the index. Defining w = Pζ′+CT ζ, we can write Sζ = 0as a first-order system
ζ′ = P−1[w − CT ζ
],
w′ = CP−1[w − CT ζ
]+Qζ.
For our extensible-shearable rod, these equations are:
ζ ′θ = wθ,
ζ ′x = −[A3(v3 − 1)−A1v3
A1cos θ +
(A3 −A1)v1A3
sin θ
]ζθ + (awx + bwz),
ζ ′z = −[
(A3 −A1)v1A3
cos θ +A1v3 −A3(v3 − 1)
A1sin θ
]ζθ + (cwx + dwz),
w′θ =
[A3 −A1
A1A3(A1v1)
2 + v3[A3(v3 − 1)]− [A3(v3 − 1)]2
A1
]ζθ
+
[A3(v3 − 1)−A1v3
A1cos θ +
(A3 −A1)v1A3
sin θ
]wx
+
[(A3 −A1)v1
A3cos θ +
A1v3 −A3(v3 − 1)
A1sin θ
]wz,
w′x = w′z = 0.
(8)
7

where
a =1
A1cos2 θ +
1
A3sin2 θ,
b = c =A1 −A3
A1A3cos θ sin θ,
d =1
A1sin2 θ +
1
A3cos2 θ.
If we find a basis of solutions of this system by using the initial conditions ζj(0) = 0,wj(0) = ej for
j = 1, 2, 3, then conjugate points are zeroes of det[M(σ)] for M =[ζ1; ζ2; ζ3
].
2.3.2 Inextensible-Unshearable case
The conjugate-point theory for the inextensible-unshearable rod involves the extension of the classictheory to handle isoperimetric constraints, as outlined in [18]. Several alternative approaches to stabilityin the inextensible case can be found in Domokos and Healey [4], Sachkov [24], Jin and Bao [11], Levyakovand Kuznetsov [14], O’Reilly and Peters [22], or Majumdar, Prior and Goriely [17]; see also the treatmentof both the inextensible and extensible cases in Kumar and Healey [13].
3 Buckling (x(1) = θ(1) = 0)
The question of rod “buckling” (by which we mean x(1) and θ(1) are fixed at zero and z(1) is allowedto vary) is well-studied. Our approach to the full boundary-value problem will be to begin with bucklingand then add the remaining boundary conditions one at a time. As such (and since the buckling resultsfor the extensible-shearable problem are perhaps less well known), we begin with a review of this case,where some analytic results can be found.
3.1 Extensible-Shearable case
3.1.1 Analysis of Straight Configurations
It is easy to check that for any λ > 0, the straight rod x(s) ≡ 0, θ(s) ≡ 0, z(s) = λs (with C1 = 0,C2 = A3(λ − 1), v1(s) ≡ 0, and v3(s) ≡ λ) is a solution to the Euler-Lagrange equations (6,7). Clearly,the λ = 1 configuration is a local minimizer of E, since it achieves the minimum possible energy value ofzero; hence for the rest of this section we assume that λ 6= 1. Intuitively, we expect that the straight rodwill only be a local minimizer of E for λ in some interval containing 1. We now determine this intervalsemi-analytically. The Jacobi equations (8) reduce to:
8

ζ ′θ = wθ,
ζ ′x = αζθ +1
A1wx,
ζ ′z =1
A3wz,
w′θ = −γζθ − αwx,w′x = w′z = 0,
where
α =A3(1− λ)
A1+ λ, γ = A3(1− λ)α = A3
[(A3
A1− 1
)(1− λ)2 + (1− λ)
]. (9)
Thus wx(·) and wz(·) are constants, equal to their prescribed initial values (wx)0 and (wz)0, and
therefore ζz(s) = (wz)0A3
s (recall from Sec. 2.3.1 that ζz has initial value zero in all cases). Next, theequations for wθ and ζθ can be solved in closed-form:
ζθ(s) =
1γ [α(wx)0 (cosh(
√−γs)− 1)−√−γ(wθ)0 sinh(√−γs)] if γ < 0,
1γ
[α(wx)0
(cos(√γs)− 1
)+√γ(wθ)0 sin(
√γs)]
if γ > 0,
(wθ)0s if γ = 0,
wθ(s) =
1√−γ [−α(wx)0 sinh(
√−γs) +√−γ(wθ)0 cosh(
√−γs)] if γ < 0,1√γ
[−α(wx)0 sin(
√γs) +
√γ(wθ)0 cos(
√γs)]
if γ > 0,
(wθ)0 if γ = 0.
(For the third case, note that γ = 0 implies α = 0 under our assumption λ 6= 1.) From the solution forζθ, we then derive:
ζx(s) =
(wx)0A1
s+ α2(wx)0 sinh(√−γs)
γ√−γ + α−α(wx)0s+(wθ)0−(wθ)0 cosh(
√−γs)
γ if γ < 0,(wx)0A1
s+α2(wx)0 sin(
√γs)
γ√γ + α
−α(wx)0s+(wθ)0−(wθ)0 cos(√γs)
γ if γ > 0,(wx)0A1
s if γ = 0.
In particular, note that ζ1, which has (wθ)0 = 1 and (wx)0 = (wz)0 = 0 is
ζ1(s) =
1γ
[−√−γ sinh(
√−γs) α(1− cosh(√−γs)) 0
]Tif γ < 0,
1γ
[√γ sin(
√γs) α(1− cos(
√γs)) 0
]Tif γ > 0,[
s 0 0]T
if γ = 0.
9

The solution ζ2, which has (wx)0 = 1 and (wθ)0 = (wz)0 = 0 is
ζ2(s) =
αγ
cosh(
√−γs)− 1(γ
A1α− α
)s+ α sinh(
√−γs)√
−γ
0
= αγ
cosh(√−γs)− 1
−λs+ α sinh(√−γs)√
−γ0
if γ < 0,
αγ
cos(√γs)− 1(
γA1α− α
)s+
α sin(√γs)√
γ
0
= αγ
cos(√γs)− 1
−λs+α sin(
√γs)√
γ
0
if γ > 0,
0sA1
0
if γ = 0.
Finally the solution ζ3, which has (wz)0 = 1 and (wθ)0 = (wx)0 = 0 is, for all values of γ, simply:
ζ3(s) =
00sA3
.Thus,
det[M(s)] =
αsA3γ2
[λs√−γ sinh(
√−γs) + 2α(1− cosh(√−γs))] if γ < 0,
αsA3γ2
[−λs√γ sin(
√γs) + 2α(1− cos(
√γs))
]if γ > 0,
s3
A1A3if γ = 0.
(10)
From here, the equation det[M(σ)] = 0 can be solved numerically and the number of roots in (0, 1)counted to determine the index (and if the index is zero, then the configuration is a local minimizer of E).Alternatively, we can consider the special case of this equation det[M(1)] = 0. Values of λ that satisfythis equation are bifurcation points on the branch of straight configurations (and we will find in the nextsection that branches of buckled configurations arise at these bifurcation points). The two bifurcationpoints that surround λ = 1 delineate the region of λ values for which the straight configuration is a localminimizer of E. This bifurcation condition is:
λ√−γ sinh
√−γ + 2α(1− cosh√−γ) = 0 (11)
for γ < 0 and−λ√γ sin
√γ + 2α(1− cos
√γ) = 0 (12)
for γ > 0.
Lemma 3.1. No bifurcation points arise when γ ≤ 0.
Proof: It is clear from the third line of Eq. (10) that the bifurcation condition det[M(σ)] = 0 has nosolution when γ = 0. Now we assume γ < 0 and prove that Eq. (11) is not satisfied.
Given that γ < 0, we must have λ > 1, since if 0 < λ ≤ 1, it is apparent from the definitions of α andγ that each is non-negative.
10

If A3 > A1, then λ > 1 implies α < 1 (α is a linear function of λ with negative slope that equals onewhen λ = 1). Combining this with the facts that sinhx > 0 and coshx > 1 for any x > 0, we have
λ√−γ sinh
√−γ + 2α(1− cosh√−γ) >
√−γ sinh√−γ + 2(1− cosh
√−γ),
which is positive, since the function g(x) ≡ x sinhx+ 2(1− coshx) is strictly positive for x > 0.On the other hand, if A3 ≤ A1, then α ≤ λ (α is a linear function of λ with slope and intercept each
between zero and one), so that
λ√−γ sinh
√−γ + 2α(1− cosh√−γ) ≥ λ√−γ sinh
√−γ + 2λ(1− cosh√−γ),
which is positive, since it is λ times some value of the known positive function g. �
Lemma 3.2. No bifurcation points arise when 0 < λ < 1 and 0 < γ < 4π2.
Proof: We note that α = A3A1
(1− λ) + λ > λ, and thus,
−λ√γ sin√γ + 2α(1− cos
√γ) > λ [2(1− cos
√γ)−√γ sin
√γ] ,
which is positive, since 2(1− cosx)− x sinx > 0 for 0 < x < 2π. Thus, Eq. (12) is not satisfied. �
Lemma 3.3. There is at least one bifurcation point λ ∈ (0, 1) if and only if A3 > 2π√A1 or
16π2A1
A1 + 16π2≤ A3 < min
(2π√A1,
A1
2
).
(Note: By plotting the functions 16π2xx+16π2 , 2π
√x, and x/2, we can restate the second condition as “A1 >
16π2 and 16π2A1A1+16π2 ≤ A3 < 2π
√A1.)
Proof: If A3 > 2π√A1, note that when λ = 0, we have γ = (A3)
2/A1 > 4π2, and when λ = 1, we haveγ = 0, so there must be some λ ∈ (0, 1) where γ = 4π2, which means that Eq. (12) is satisfied and this λis a bifurcation point.
On the other hand, if A3 ≤ 2π√A1, then when λ = 0, we have γ = (A3)
2/A1 ≤ 4π2. From thelast expression in Eq. (9), if A3 ≥ A1
2 , then γ is a strictly increasing function of 1 − λ, hence a strictlydecreasing function of λ, on (0, 1), which means that γ < 4π2 for λ ∈ (0, 1) and thus by Lemma 3.2 wehave no bifurcation point. If A3 <
A12 , then by that same expression, γ is a quadratic function of λ that
attains a maximum value of A1A34(A1−A3)
, which is greater than or equal to 4π2 if and only if
A3 ≥16π2A1
16π2 +A1.
If this condition holds, then there is some λ ∈ (0, 1) for which γ = 4π2 and we have a solution of Eq.(12), and if it does not hold, then γ < 4π2 for all λ ∈ (0, 1) so there is no solution of Eq. (12).�
Lemma 3.4. There is at least one bifurcation point λ ∈ (1,∞) if and only if A3 > A1.
11

Proof: If A3 > A1, then we have α < 0 for λ > λ∗ ≡ A3/(A3 − A1) > 1. Thus, γ > 0 for λ > λ∗,and there must be infinitely many solutions λ > λ∗ of Eq. (12) because
√γ grows without bound as λ
increases, and Eq. (12) is satisfied for√γ any multiple of 2π.
If A3 ≤ A1, then α > 0 for all λ > 0, so that γ < 0 for λ > 1, and Lemma 3.1 shows that there areno bifurcation points for λ > 1.�
Combining the previous two lemmas with the presumption stated above that the straight configurationis stable for the interval of values of λ that includes λ = 1 and extends in each direction until we reach abifurcation point or zero, we have:
Theorem 3.1. The straight configuration is stable if and only if λc < λ < λs, where:
λs ≡{
smallest solution of Eq. (12) such that λ > 1 if A3 > A1,
+∞ if A3 ≤ A1,
and
λc ≡
largest solution of Eq. (12) such that 0 < λ < 1 if A3 > 2π
√A1 or
16π2A1A1+16π2 ≤ A3 < min
(2π√A1,
A12
),
0 otherwise.
(If λs < +∞, it is the first shearing instability; if λc > 0, it is the first Euler buckling instability)
3.1.2 Numerical Exploration of Buckled Configurations
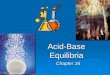
Numerical simulations reveal pitchfork bifurcations at λc and λs (if A1 < A3), as shown in the rightportion of Fig. 2 for stiffnesses close to the inextensible limit (A1 = 2560, A3 = 25600).3 For thecompression case, we have λc ≈ 1 (since we are near the inextensible limit) and we see in Fig. 2 thatfor 0 < z(1) < λc there is a pair of buckled solutions that are mirror images with respect to reflectionover the z-axis, one with the center of the rod buckling left and one with the center of the rod bucklingright. These buckled solutions are stable until they reach z(1) = 0, when the configuration becomes afigure-eight. A close-up view of one such solution (the one with z(1) = 0.495) is shown in Fig. 3; itinvolves a minimal amount of shearing, as illustrated by the inset plots of v1(s) and v3(s)− 1.
At z(1) = 0, there is a secondary bifurcation point (derived theoretically by [16]), where the branch ofbuckled configurations connects to a continuous family of rigid rotations of the figure-eight configuration(this family is generated by the origin “snaking” along the figure-eight combined with a rotation of theconfiguration to match the boundary conditions r(0) = 0 and θ(0) = 0. In a topologically-accuratebifurcation diagram, e,g., a 3D representation that plotted z(1), θ′(0) and C1, this branch would be aclosed loop, since we return to where we started once the origin “snakes” back to its original positionwithin the figure-eight. In the 2D representation in Fig. 2, this branch is instead seen as a vertical redline at z(1) = 0; this line is double-covered, since we are seeing the closed loop “end on”.
3The values A1 = 2560, A3 = 25600 are of an order of magnitude relevant to DNA looping. Nondimensionalization ofN -basepair DNA illustrates that A3/K ∝ N2 and preliminary computations from the laboratory of John Maddocks [privatecommunication] suggest a proportionality constant on the order of 10, so that for loops with 10 ≤ N ≤ 100, we would expect1000 ≤ A3 ≤ 100000. The ratio A3/A1 is less well-studied in the DNA literature, but preliminary analysis of moleculardynamics simulations [John Maddocks, private communication] suggests a ratio on the order of 1/10; in Sec. 4.1 below, weshow that the key features of our results are relatively insensitive to A3/A1 once we are close to the inextensible limit.
12

!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
!0.2 0 0.2 0.6 1!20
!10
0
10
20
z (1)
d!/ds(0
)
!0.2 0 0.2 0.6 1!20
!10
0
10
20
Figure 2: Bifurcation diagram for buckling with x(1) = θ(1) = 0 fixed, with sample rod configurationssuperimposed; thick lines are for stiffnesses A1 = 2560 , A3 = 25600, while thin lines are for inextensiblerod (mostly covered by the thick lines; note that there are no inextensible versions of the light bluesegment at θ′(0) = 0 or of the curves with z(1) > 1). As the parameter z(1) is varied, we plot θ′(0)of each configuration, with color indicated by stability (green denoting local minimizers of E; red andblue denoting unstable configurations). To simplify the diagram, we truncate the branch of straightconfigurations at z(1) ≈ 0.4, 1.15 (in fact it extends forever in each direction) and omit many higher-order(and more and more unstable) buckling branches that bifurcate off this branch of straight configurations.
There are four bifurcation points on this loop of figure-eights. The two bifurcation points at maximal|θ′(0)| connect to the branches of buckled configurations already discussed. The other two bifurcationpoints occur at θ′(0) = 0 and yield new branches. In fact, these new branches give stable configurationswith z(1) < 0 (whereas the original buckled configurations become unstable below z(1) = 0). In Fig. 2,these two bifurcation points are coincident and the branches that emerge form an “X”, but that is anartifact of the chosen 2D projection; in a topologically-correct representation, one stable-unstable pair ofbranches would be above the plane shown here and the other would be below.
For stretching, we see in Fig. 2 that for z(1) > λs, there is a pair of S-shaped buckled solutions thatare mirror images with respect to reflection over the z-axis. (Consonant with the theory in Sec. 3.1.1,if A1 > A3, this branch of solutions is not present and instead the branch of straight configurationsremains stable for all z(1) > 1.) These S-shaped configurations involve significant shearing, as can be
13

0 0.5
0
0.5
x
z
0 0.5 1−0.04
−0.02
0
0.02
0.04
s
shea
r stra
ins
Figure 3: Close-up of configuration from Fig. 2 at z(1) = 0.495, θ′(0) = 9.84. The inset plot shows v1(green) and v3 − 1 (red) as a function of arc length.
seen in the close-up view in Fig. 4. (For the near-inextensible case considered in Fig. 2, these S-shapedconfigurations involve very small deviations in the x-direction, so for purposes of illustration, the x-scalehas been significantly magnified for those two configurations in Fig. 2 as compared to the uniform aspectratios used for the other configurations; the true aspect ratio can be seen in Fig. 4.)
Summarizing what these results imply for the count of local minimizers, for λc < z(1) < λs, we have asingle local minimizer of the energy (the straight configuration), while for z(1) < λc or z(1) > λs, we havetwo equal-energy local minimizers. For z(1) > 0, the two local minimizers lie on the branches connectedto the branch of straight configurations, while for z(1) < 0, they lie on branches connected to the closedloop of figure-eights.
3.2 Inextensible-Unshearable Rod
For the inextensible-unshearable case, the classic results of Euler show that compression buckling occursat λ = 1, once a sufficient force (as manifested mathematically in the appropriate Lagrange multiplier)is sufficiently large. For purposes of comparison, we can show that in the limit A3 →∞ with fixed ratioA3/A1 for the extensible-shearable problem, the compression bifurcation point λc → 1, in agreement withthe inextensible result, because, as argued above, at λ = λc, we have
√γ ≤ 2π, and by (9), the value
14

0 0.010
0.4
0.8
1.2
x
z
0 0.5 1−0.6
−0.4
−0.2
0
0.2
s
shea
r stra
ins
Figure 4: Close-up of configuration from Fig. 2 at z(1) = 1.2, θ′(0) = 4.95. Frames drawn with correctangular orientation, despite the very unequal axis scaling in the (x, z) plot. The inset plot shows v1(green) and v3 − 1 (red) as a function of arc length.
γ = 4π2 corresponds to
1− λc =
−1 +
√1 + 16π2
A3
(A3A1− 1)
2(A3A1− 1) ,
which goes to zero as A3 → ∞ (at fixed A3/A1). This result matches a similar finding in [20], whichconsiders compressed straight equilibria and the first branch of buckled equilibria, in both the extensiblecase and the inextensible limit, and goes on to analyze dynamical oscillations about these configurations.
For the inextensible-unshearable case, λ > 1 is disallowed, so the stretching bifurcation points foundabove have no sensible “inextensible limit”.
15

4 Equilibria with θ(1) = 0, arbitrary x(1), z(1)
Building from the buckling results, we present results of a numerical exploration of all possible values ofx(1) and z(1), with θ(1) = 0 fixed. With an eye to applications near the inextensible limit, we consideronly rods with A3 sufficiently large that there is a compression bifurcation point λc ∈ (0, 1). A typicalresult is shown in Fig. 5.
0 0.2 0.4 0.6 0.8 1
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Closeup view
x(1)
z(1)
Figure 5: Local minimizers of energy for various boundary conditions x(1), z(1), with θ(1) = 0 fixed.The blue, red, and green curves denote bifurcations (see text for descriptions); the thick curves are forA1 = 2560, A3 = 25600, while the thin light blue and red curves are for the inextensible rod. The blackcurve is the boundary of admissible shapes for the inextensible problem (but solutions exist outside it forthe extensible problem). Shapes are shown in order of increasing energy within each group (in the groupsof shapes shown at (x(1), z(1)) = (0.75, 1) and (0.4, 1.25), the right-most configuration has tight curlicuesclose to each end of the rod, as shown in the inset closeup view for (0.75, 1)). Results for x(1) < 0 canbe determined by reflecting this diagram, and the shapes, about the vertical axis.
In Sec. 3, we saw that for x(1) = 0, there are two local energy minimum configurations when z(1) > λsor z(1) < λc. If we introduce a small perturbation in x(1), we have two corresponding perturbed localenergy minimizers. For 0 < z(1) < λc, this pair of configurations have the same energy (they are relatedby a 180◦ rotation followed by a translation to restore the boundary condition r(0) = 0), while they havedifferent energies (and are thus not symmetry-related) for z(1) > λs or z(1) < 0. The blue, green, andred curves in Fig. 5 describe the fate of these solutions as we vary (x(1), z(1)) globally.
16

The blue curve (which goes from (x(1), z(1)) = (0, 0) to (0, λc) in Fig. 5, and thus forms a closed loopin the full x(1)-z(1) plane) bounds the region in the x(1)-z(1) plane where there is a pair of lowest-energyconfigurations with the same energy. As we approach the blue curve from the inside, these two solutionscoalesce to yield a single lowest-energy configuration outside the blue curve. In other words, every pointon the blue curve is a (supercritical) pitchfork bifurcation point.
The green curve (a nearly horizontal curve passing through (0, λs)) is the lower boundary of the regionof existence for the higher-energy local-minimizer coming from the perturbation of the pair of solutionsat x(1) = 0, z(1) > λs. If we track these higher-energy configurations via parameter continuation, weexperience a fold at the green curve (and, as is typical, the branch becomes unstable after the fold); thus,this is a curve of saddle-node bifurcation points.
Similarly, the red curve is a curve of saddle-node points that bounds the region of existence for thehigher-energy local-minimizer coming from the perturbation of the pair of solutions at x(1) = 0, z(1) < 0.Note that this red curve approaches but does not touch the x(1) = 0 axis near z(1) = 1. As a result, ifwe track energy-minimizers by parameter continuation beginning with x(1) = 0 and 0 < z(1) < λc, we donot find these higher-energy local minimizers—they are found by the more circuitous route of first fixingx(1) = 0 and decreasing z(1) until it is negative (choosing the correct branch of the four that bifurcatesfrom the circle of figure-eights), then increasing x(1), and then increasing z(1).
Summarizing the counts of local minima that result from these bifurcation curves, to the left of theblue curve, or everywhere on the axis x(1) = 0 apart from the segment from (0, λc) to (0, λs), two shapesare tied for lowest energy; elsewhere, there is a single lowest-energy shape (except that at x(1) = z(1) = 0there is an infinite family of symmetry-related equal-energy figure-eights). To the right of the red curveor above the green curve there is a higher-energy local minimum in addition to the unique lowest-energyshape, or equal-energy pair of shapes, whichever is present. Thus, only in the skinny region bounded bythe green, red, and blue curves is there is a single local minimum with reasonably low energy.
4.1 Dependence on A1, A3
The bifurcation diagram in (x(1), z(1)) space depends considerably on the extension and shearing stiff-nesses. To illustrate this, we show in Fig. 6 how the blue, green, and red curves from Fig. 5 vary with A3
for a fixed value of the ratio A3/A1. All three curves appear to have asymptotic limits for A3 large. Next,we show in Fig. 7 that, for A3 large, the blue curve, and the portion of the red curve inside the circle[x(1)]2 + [z(1)]2 = 1, are largely independent of the value of A1, which would seem to be a prerequisiteif we are to sensibly discuss an “inextensible limit” of these curves. In contrast, the green curve andthe portion of the red curve outside [x(1)]2 + [z(1)]2 = 1 vary considerably with A1, and indeed do notexhibit any asymptotic behavior as A1 varies, since they drift to arbitrarily large values of z(1) as A1
increases. Given that these curves lie outside the accessible region for the inextensible problem, we wouldnot expect them to necessarily exhibit any “inextensible limit” behavior.
4.2 Inextensible-Unshearable Rod
The numerical experiments whose results are shown in Figs. 6 and 7 suggest possible inextensible-limitbehavior for the blue curve and the portion of the red curve inside the accessible region. This is confirmedby independent computation of these bifurcation curves within the inextensible model: the thin red andlight blue curves in Fig. 5.
17

0 0.3 0.6
0
0.5
1
x(1)
z(1)
0 0.3 0.6−0.5
0
0.5
1
x(1)
z(1)
0 0.3 0.61
1.2
1.4
x(1)
z(1)
Figure 6: The bifurcation curves from Fig. 5 as A3 varies, with A3/A1 = 10 fixed (lightest curve isA3 = 100, then A3 = 200, 400, etc. through darkest at A3 = 51200. The blue, red, and green curvesappear to approach asymptotic curves by around A3 = 10000, 50000, and 10000, respectively.
0 0.3 0.6
0
0.5
1
x(1)
z(1)
0 0.05 0.1
0
0.5
1
x(1)
z(1)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70.9
0.95
1
1.05
1.1
1.15
1.2
1.25
1.3
Figure 7: The bifurcation curves from Fig. 5 as A3/A1 varies, with A3 = 51200 fixed. For the left twofigures, four values of A3/A1 are shown: 10, 10/4, 10/16, and 10/64 from darkest to lightest (with allof them indistinguishable for the blue curve, and the last two being indistinguishable for the red curve.)For the right figure, three values of A3/A1 are shown: 10× 2, 10, and 10/2 from darkest to lightest.
5 Equilibria with θ(1) 6= 0
Figs. 8 and 11 shows the structure of the set of critical points of E as θ(1) varies, with Fig. 8 showing theregion accessible to the inextensible rod and Fig. 11 showing a region that requires extension (each figureshows results for two different extensible rods, with the first being nearly inextensible). The inset imagesat different (x(1), z(1)) locations are bifurcation diagrams plotting E versus θ(1) for those (x(1), z(1)),with color indicating stability as in Fig. 2. The black line in each bifurcation diagram denotes θ(1) = 0;thus, the intersections of green curves with this line corresponds to the configurations in Fig. 5 (really,the version of Fig. 5 for that A3, A1).
18

5.1 Compressed configurations (z(1) < 1)
5.1.1 Bifurcation Diagrams with θ(1) varying
To aid in a more detailed discussion, two of the more intricate bifurcation diagrams from the nearly-inextensible case in Fig. 8 are magnified in Fig. 9, and selected rod configurations are shown on one ofthe diagrams.
For the x(1) = 0.25, z(1) = 0.3 diagram in Fig. 9, note that three different green curves cross theθ(1) = 0 line, two at low (and nearly equal) energies and one at a higher energy. This corresponds to thetrio of configurations found at this (x(1), z(1)) location in Fig. 5. One of the low-energy configurationslies on a branch on which θ(1) increases monotonically until at least 3π but when decreasing hits a foldat θ(1) ≈ −π/5, after which θ(1) begins to increase and the configurations become unstable (the curveis colored red). This is followed by a sequence of folds with the energy increasing (beyond the rangeshown in the figure) and θ(1) oscillating around zero. The other low-energy configuration has a similarbehavior, it decreases monotonically without a fold, but when increasing, it hits a fold at θ(1) ≈ 2π/3 andundergoes a sequence of folds with increasing energy. In our experience, these two branches connect atsome high energy; i.e., if one starts at the point (θ(1), E) ≈ (π, 10) and decreases θ(1), one will encountera long sequence of folds with the energy increasing (and the stability index increasing by one at eachfold), and then at some point the energy (and index) will begin to decrease via a second sequence of folds,eventually reaching the stable configuration at (θ(1), E) ≈ (−π, 20).
There is, however, a second disjoint branch in this x(1) = 0.25, z(1) = 0.3 diagram. It containsthe higher-energy stable configuration at (θ(1), E) ≈ (0, 100), which lies on a short branch of energyminimizers ending at two folds, one with θ(1) > 0 and the other with θ(1) < 0. After these folds,the configurations become unstable and the energy increases. Continuing past either of these folds, onemeets a sequence of folds just as described in the previous paragraph; one such fold can be seen at(θ(1), E) ≈ (π/8, 105) where the branch changes from red to blue, and the rest occur above the energyrange shown here. In our experience, these two sequences of folds connect at some high energy, i.e., ifone starts at the point (θ(1), E) ≈ (0, 100) and goes in either direction, one will eventually return to thispoint. Thus, this branch is an “isola”, a loop disconnected from the other component of the bifurcationdiagram.
The x(1) = 0.5, z(1) = 0.5 diagram in Fig. 9 shows many of the same features as the x(1) = 0.25,z(1) = 0.3 diagram, but also a few differences. The lowest energies are lower and the folds that connectto these lowest energies (the zigzagging branches between θ(1) just below zero and θ(1) ≈ π/2) are closerto each other (so that we see more folds in the energy range displayed).
There is also a significant topological difference in that the entire diagram is now a single branch: thehigher-energy isola and the lower-energy branch from the x(1) = 0.25, z(1) = 0.3 diagram have merged.This merging has occurred via a new fold in the low-energy branch at (θ(1), E) ≈ (−3π/2, 60) (whichseems to have emerged from the slight “wiggle” in that region in the x(1) = 0.25, z(1) = 0.3 diagram).This bifurcation occurs on the purple curve in Fig. 8: outside the zone bounded by the purple and redcurves, all local minima lie on a single branch in the bifurcation diagram, while inside this zone, theenergy minimizers lie on two distinct branches (one containing the two low-energy local minima and theother containing the high-energy local minimum).
Elsewhere in Fig. 8, we see behaviors reminiscent of those shown up close in Fig. 9. When there isa pair of low-energy local minima at θ(1) = 0, one lies on a branch that folds soon after decreasing andthe other lies on a branch that folds soon after increasing, in each case yielding a sequence of folds with
19

the energy increasing (and we believe always connecting at high energy). In cases where there is a singlelow-energy local minimum, the fold that occurs after decreasing θ(1) is further from zero (often around−3π/2) and proceeding past that fold, one eventually connects to the high-energy local minimum.
We have truncated these diagrams in two ways: we only show θ(1) values up to ±3π and energiesup to E = 200. The diagrams appear to simplify once we reach |θ(1)| = 3π, in that there is a uniqueenergy minimizer at each fixed θ(1), and the energy increases monotonically with |θ(1)|. These large-|θ(1)| configurations are inflection-free (cf. the “inflection-free” criterion discussed in [1, 11, 12], the lastof which includes the extensible case) and contain a sequence of loop-the-loops (more and more as |θ(1)|increases). Such planar self-contacting solutions are unlikely to be achievable by a physical filament suchas DNA, and indeed are unlikely to survive as stable within a 3D theory, so we have not pursued a carefulstudy of them here.
In terms of the energy-window 0 ≤ E ≤ 200, we have, as reported above, explored some individualcases and found no additional stable configurations other than what are either shown here or implied byextrapolation of stable branches shown here (e.g., in the top half of Fig. 8, in the diagram at (x(1), z(1)) =(0.8, 0.4), the upper-left green branch continues beyond its truncation at E = 200). Thus, in practice, forautomated parameter studies, we often truncated branches once they reached E = 200, but the evidencesuggests that we have not thereby excluded any stable solutions.
Even if there are stable configurations with E > 200, they would not likely contribute appreciably to anequilibrium distribution of configurations at a given set of boundary conditions. For a DNA segment withN base pairs, we have L ≈ (0.34nm)N and K ≈ (50nm)(kBT ) (the 50nm is the bending “persistencelength”, kB the Boltzmann constant, and T the temperature), so that our nondimensional energy Ecorresponds to true energy EK/L ≈ 150E
N (kBT ). The Boltzmann distribution says that configurations
are weighted by the factors e−energy/(kBT ). Thus, in our diagrams, an increase in non-dimensionalized Eby 10 multiplies the Boltzmann weighting by e−1500/N . Thus, if we are studying DNA cyclization, whereN ≈ 200, an increase in E by 10 multiplies the Boltzmann weighting by e−7.5 ≈ 0.0005, and for thetypical DNA looping problem where N = 20–100, the decrease in Boltzmann weighting when we increaseE by 10 is even more dramatic. Examining the diagrams in Fig. 8, we can see that for |θ(1)| ≤ 2π,the lowest-energy stable configuration has E < 100, so that any configuration with E > 200 would haveBoltzman weighting many orders of magnitude below that of the lowest-energy configuration.
5.1.2 A different 2D slice (z(1) = 0.5)
For additional perspective on the bifurcations seen in Figs. 5 and 8, we show in Fig. 10 a different 2D sliceof the 3D bifurcation space, namely the (x(1), θ(1)) plane with z(1) = 0.5 fixed. Note the 180◦ rotationalsymmetry in the figure, due to the fact that for any energy minimizer with some (x(1), z(1), θ(1)), itsreflection about the z-axis is also an energy minimizer with final conditions (−x(1), z(1),−θ(1)). Wefocus our discussion on the region with x(1) > 0, since Figs. 5 and 8 were restricted to this region.
The two slices only intersect at those configurations that have θ(1) = 0 and z(1) = 0.5, which appearsas the horizontal line z(1) = 0.5 in Fig. 5 or 8, and the horizontal line θ(1) = 0 in Fig. 10. Nevertheless,juxtaposing the two figures confirms how the red and blue bifurcation curves in Fig. 5 extend as bifurcationsurfaces in the full 3D parameter space. For example, noting that the vertical gray lines in Fig. 10 showthe branches of local minimizers as θ(1) varies, we see that there are two local minimizers in the regioninside the blue curve and between the two red curves, which corresponds to the region in Fig. 5 insidethe blue curve and to the left of the red curve. Similarly, there are three local minimizers in the regioninside the blue curve and “outside” either red curve, which corresponds to the region in Fig. 5 inside the
20

blue curve and to the right of the red curve. There are two local minimizers in the region outside theblue curve and “outside” either red curve, corresponding to the region in Fig. 5 outside the blue curveand to the right of the red curve. Finally, there is a single local minimizer in the region outside the bluecurve and between the red curve, which corresponds to the sliver in Fig. 5 bounded by the red, blueand green curves, so apparently this zone is significantly larger than the θ(1) = 0 slice suggested (thegreen curve does not appear in Fig. 10 since it is a bifurcation curve due to stretching and here we havez(1) = 0.5 < 1).
Fig. 10 also gives a useful perspective on the isolas discussed above; they are the red-to-red verticalgray lines that occur for 0.07 ≤ x(1) ≤ 0.256 (or for −0.256 ≤ x(1) ≤ −0.07). Looking to the rightof this region, say at x(1) = 0.5, we see the middle vertical gray line extends from a point on the bluecurve around θ(1) = π/2 to a point on the red curve just above θ(1) = −2π; if we were to continue pastthis point (on a branch of unstable configurations not shown in the figure), we would eventually connectto the left vertical gray line at the point on the red curve just above θ(1) = 0, after which θ(1) woulddecrease along the left vertical gray line to large negative values. This connectivity changes for x(1) justbelow 0.256. For example, at x(1) = 0.2, we see that the middle vertical gray line still extends from apoint on the blue curve around θ(1) = π/2 down to a point on the red curve just above θ(1) = −2π, butnow if we were to continue past this point, we would connect to a quite different point on the red curve,around θ(1) = −8π/5, after which θ(1) would decrease to large negative values. Meanwhile the point onthe red curve just above θ(1) = 0 is now connected to another new point on the red curve, just aboveθ(1) = −π, and if this branch is continued, it closes up on itself to form the isola. Thus at x(1) = 0.256,we have the structure of a homoclinic bifurcation: as x(1) increases, a closed loop merges with a fold toform a single branch.
5.2 Stretched configurations (z(1) > 1)
Turning to the A3 = 51200, A1 = 5120 diagram in Fig. 11, we see in the region between the red and greencurves a relatively simple (E, θ(1)) diagram: a “well” with some flattening at |θ(1)| ≈ 2π. Above thegreen curve, we see similar (E, θ(1)) diagrams with the addition of the sort of cascade of folds surroundingθ(1) = 0 seen in Fig. 8. The addition of this cascade seems to derive from the fact that between the redand green curves there is a single local minimum with θ(1) = 0, whereas above the green curve thereare two similar-energy local minimizers with θ(1) = 0. Below the red curve, we add to the well shapeanother feature seen in Fig. 8: a fold around θ(1) = −2π that connects the branch to a higher-energylocal minimizer with θ(1) = 0. The A3 = 3200, A1 = 320 diagram in Fig. 11 shows the same pattern offeatures (refer back to Fig. 8 for diagrams just below the red curve).
Fig. 12 shows a close-up of one of the more intricate diagrams from Fig. 11, first with rod configurationssuperimposed, and then with plots of θ vs. s. The configurations are quite close to straight lines from(0, 0) to (x(1), z(1)), with tight curls included to achieve the boundary condition on θ(1). For example,for the three equilibria with θ(1) < 0 and E > 500, the configurations involve a curlicue quite close tothe origin that decreases θ by about 2π (as evidenced by the sharp initial drop in the θ-s plots) andthen at the s = 1 end of the rod, there is additional bending to hit the desired θ(1) value, although notethat to achieve θ(1) = −π, the rod bends clockwise by only π/4 while θ increases by π, and similarly toachieve θ(1) = −3π, the rod bends counterclockwise by 3π/4 while θ decreases by π. Similarly, for thetwo equilibria with θ(1) > π, the configurations involve a curlicue that increases θ by about 2π (near therod midpoint for the rightmost diagram and near the rod far endpoint for the other), and then at thes = 1 end of the rod, there is additional bending and sharp θ increase (in the same direction but not the
21

same magnitude) to hit the desired θ(1) value.
6 Discussion
We have explored the number of energy-minimizing configurations for the planar elastic rod over the3-dimensional space of possible boundary conditions. We used the classic Euler-buckling problem, andsubsequently the θ(1) = 0 problem, as 1D and 2D organizing centers for understanding the results forthe full 3D space of boundary conditions. Whereas the Euler-buckling problem tells a relatively simplestory in terms of number of minima—a single energy minimizer for λc < z(1) < λs and two equal-energyconfigurations for all other values of z(1)—the 2D θ(1) = 0 slice reveals more interesting features as itbreaks some of the symmetry. First, it exhibits curves in (x(1), z(1)) space (the blue and green curvesin Fig. 5) that serve to separate the region with a single low-energy minimizer from the region withtwo low-energy minimizers, just as the points λc and λs did in the Euler-buckling problem. In addition,the θ(1) = 0 slice introduces a new element: the presence of higher-energy minimizers that are connectto Euler-buckling configurations only in the region z(1) < 0, but nevertheless exist in a wide swath of(x(1), z(1)) space (everything to the right of the red curve in Fig. 5).
Adding the third parameter θ(1) introduces some additional complications and yet the basic structureseen in the θ(1) = 0 slice is largely preserved. For example, the z(1) = 0.5 slice in Fig. 10 shows the sameblue and red curves that divide space into zones of one, two or three energy minimizers, though now thetwo low-energy minimizers in the interior of the blue curve need not have the same energy. Similarly theθ(1)-bifurcation diagrams seen in Figs. 8 and 9 show fairly consistent qualitative features over the wholespace of (x(1), z(1)) values, with single energy-minimizers for large positive and negative values of θ(1)connected via one, two, or three separated curves of energy-minimizers.
Looking to possible applications, the results paint a pretty clean picture of the lowest-energy config-urations that would be most relevant to using this theory to predict DNA looping probabilities (thoughwe repeat our disclaimer that this planar study serves only as a first step toward, and not a substitutefor, a 3D bifurcation study relevant for a full looping analysis). In the two 2D slices we considered, theblue curve divides the region with one or two low-energy minimizers; presumably (and our θ(1)-diagramssupport this conjecture) there is a “blue surface” in the full space of boundary conditions that plays thissame role. So, given boundary conditions of interest (say, from a binding protein), one would determinewhether one was inside or outside the surface and then know whether to compute one or two lowest-energyconfigurations. Our results also show one way to compute those lowest-energy configurations: they canbe found by following either of the Euler-buckling modes down to the z(1) value of interest, then changingx(1) to the value of interest (following the fold at the pitchfork bifurcation point to find two configurationsinside the blue curve, or branching off at the pitchfork bifurcation point to find the single configurationoutside the blue curve), and then varying θ(1) from one or both of these (x(1), z(1)) starting points.(Modeling DNA looping requires going beyond minimizing the energy, but a variety of approaches [30, 2]build a broader theory around this energy minimization step. In addition, many models for DNA addfeatures beyond the simple model used here, such as intrinsic bending and non-diagonal elastic energy,so that even to minimize the energy one would need to use the results of this article as a starting guessfor computations involving a more intricate energy model.)
In cases where the higher-energy minimizer is of interest, our results similarly show when to expecta higher-energy minimizer to exist and how to find it. The story is more complicated, including thepossibility of isolas of solutions, but again the θ(1) = 0 picture reveals most of the important features.
22

For many applications, these configurations are of such higher energy that they could be ignored, buttheir energies do become competitive with the lower energy solutions when the boundary conditions areclose to (x(1), z(1)) = (0, 0), so in that case at least, they would need to be considered.
Since we have the DNA looping application in mind, we have not focused as much on sheared orstretched configurations, but we have presented some results on those features that could serve as astarting point for more detailed study.
7 Acknowledgments
The author thanks Kathleen Hoffman and Mary Arthur for preliminary conversations and computationsthat contributed to the beginning of this project, and to John Maddocks for several useful consultationsduring and subsequent to sabbatical visits at the Ecole Polytechnique Federale de Lausanne.
23

References
[1] M. Born. Untersuchungen uber die Stabilitat der elastischen Linie in Ebene und Raum, underverschiedenen Grenzbedingungen. PhD thesis, University of Gottingen, 1906.
[2] L. Cotta-Ramusino and J.H. Maddocks. Looping probabilities of elastic chains: A path integralapproach. Phys. Rev. E, 82:051924, 2010.
[3] G. Domokos, W. B. Fraser, and I. Szeberenyi. Symmetry-breaking bifurcations of the uplifted elasticstrip. Physica D, 185:67–77, 2003.
[4] G. Domokos and T.J. Healey. Multiple helical perversions of finite intristically curved rods. Int. J.Bif. Chaos, 3:871–890, 2005.
[5] Z. Gaspar, G. Domokos, and I. Szeberenyi. A parallel algorithm for the global computation of elasticbar structures. Computer Assisted Mechanics and Engineering Sciences, 4:55–68, 1997.
[6] I. M. Gelfand and S. V. Fomin. Calculus of Variations. Dover, Mineola, NY, 1963.
[7] T.J. Healey and C.M. Papadopoulos. Bifurcation of hemitropic elastic rods under axial thrust. Q.Appl. Math., to appear.
[8] M. E. Henderson and S. Neukirch. Classification of the spatial equilibria of the clamped elastica:numerical continuation of the solution set. Int. J. Bif. Chaos, 14:1223–1239, 2004.
[9] P. Holmes, G. Domokos, and G. Hek. Euler buckling in a potential field. J. Nonlinear Sci., 10:477–505, 2000.
[10] P. Holmes, G. Domokos, J. Schmitt, and I. Szeberenyi. Constrained Euler buckling: an interplay ofcomputation and analysis. Comput. Methods Appl. Mech. Engrg., 170:175–207, 1999.
[11] M. Jin and Z. B. Bao. Sufficient conditions for stability of Euler elasticas. Mech. Res. Commun.,35:193–200, 2008.
[12] M. Jin and Z. B. Bao. Extensibility effects on Euler elastic’s stability. J. Elast., to appear.
[13] A. Kumar and T.J. Healey. A generalized computational approach to stability of static equilibriaof nonlinearly elastic rods in the presence of constraints. Comput. Methods Appl. Mech. Engrg.,199:1805–1815, 2010.
[14] S. V. Levyakov and V. V. Kuznetsov. Stability analysis of planar equilbrium configurations of elasticrods subjected to end loads. Acta Mech., 211:73–87, 2010.
[15] A. E. H. Love. A Treatise on the mathematical theory of elasticity. Dover, New York, 1944.
[16] J. H. Maddocks. Stability of nonlinearly elastic rods. Arch. Rational Mech. Anal., 85(4):180–198,1984.
[17] A. Majumdar, C. Prior, and A. Goriely. Stability estimates for a twisted rod under terminal loads:a three-dimensional study. J. Elast., 109:75–93, 2012.
24

[18] R. Manning, K. Rogers, and J. Maddocks. Isoperimetric conjugate points with application to thestability of dna minicircles. Proc. R. Soc. Lond. A, 454:3047–3074, 1998.
[19] M. Morse. Introduction to Analysis in the Large. Institute for Advanced Study, Princeton, NewJersey, 1951.
[20] S. Neukirch, J. Frelat, A. Goriely, and C. Maurini. Vibrations of post-buckled rods: the singularinextensible limit. J. Sound and Vibration, 331:704–720, 2012.
[21] M. Nizette and A. Goriely. Towards a classification of Euler-Kirchhoff filaments. J. Math. Phys.,40:2830–2866, 1999.
[22] O. M. O’Reilly and D. M. Peters. On stability analyses of three classical buckling problems for theelastic strut. J. Elast., 105:117–136, 2011.
[23] P.K. Purohit and P.C. Nelson. Effect of supercoiling on formation of protein mediated DNA loops.Phys. Rev. E, 74:061907, 2006.
[24] Yu. L. Sachkov. Conjugate points in the euler elastica problem. J. Dynamical and Control Syst.,14:409–439, 2008.
[25] R. Schleif. DNA looping. Annu. Rev. Biochem., 61:199–223, 1992.
[26] S. Semsey, K. Virnik, and S. Adhya. A gamut of loops: meandering DNA. TIBS, 30:334–341, 2005.
[27] Y. Shi and J.E. Hearst. The Kirchhoff elastic rod, the nonlinear Schrdingier equation, and DNAsupercoiling. J. Chem. Phys., 101:5186–5200, 1994.
[28] D. Swigon, B.D. Coleman, and W.K. Olson. Modeling the Lac repressor-operator assembly: theinfluence of DNA looping on Lac repressor conformation. Proc. Natl. Acad. Sci., 103:9879–9884,2006.
[29] G. H. M. van der Heijden, S. Neukirch, V. G. A. Goss, and J. M. T. Thompson. Instability andself-contact phenomena in the writhing of clamped rods. Int. J. Mech. Sci, 45:161–196, 2003.
[30] Y. Zhang and D.M. Crothers. Statistical mechanics of sequence-dependent circular DNA and itsapplication for DNA cyclization. Biophys. J., 84:136–153, 2003.
[31] Y. Zhang, A.E. McEwen, D.M. Crothers, and S.D. Levene. Statistical-mechanical theory of DNAlooping. Biophys. J., 90:1903–1912, 2006.
25

0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
1
x(1)
z(1)
A3 = 51200A1 = 5120
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
1
x(1)
z(1)
A3 = 3200A1 = 320
Figure 8: Plots of E vs. θ(1) (−3π ≤ θ(1) ≤ 3π, 0 ≤ E ≤ 200) superimposed on the θ(1) = 0 informationas in Fig. 5 for nearly inextensible (A3 = 51200, A1 = 5120) and somewhat extensible (A3 = 3200,A1 = 320) rods (see text for description of the purple curve). Location of each (E, θ(1)) inset gives its(x(1), z(1)) values; in each plot, green denotes energy minimizers, red and light blue denote unstableconfigurations, and vertical line is θ(1) = 0. 26

!3! !2! !! 0 ! 2! 3!0
40
80
120
160
200
!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!"(1)
E
!3! !2! !! 0 ! 2! 3!
x(1) = 0.25
z (1) = 0.3
!3! !2! !! 0 ! 2! 3!0
40
80
120
160
200
!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!"(1)
E
!3! !2! !! 0 ! 2! 3!
x(1) = 0.5
z (1) = 0.5
Figure 9: Two of the bifurcation diagrams from Fig. 8 (A3 = 51200, A1 = 5120).
27

x(1)
e(1)
!1 !0.5 0 0.5 1!2!
!!
0
!
2!
Figure 10: Red and blue bifurcation curves from Fig. 8 in the plane with (x(1), θ(1)) varying whilez(1) = 0.5 is fixed. The vertical gray lines show the branches of local minimizers as θ(1) is varied;whenever a vertical gray line terminates on the red or blue curve, there is a fold in θ(1) (and subsequentlocal of stability, so the continuation of that branch after the fold is not shown).
28

0 0.1 0.2 0.3 0.4 0.5 0.60.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
x(1)
z(1)
A3 = 51200A1 = 5120
0 0.1 0.2 0.3 0.4 0.5 0.60.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
x(1)
z(1)
A3 = 3200A1 = 320
Figure 11: Plots of E vs. θ(1) as in Fig. 8 but for higher values of z(1). Note that the energy scale forthe A3 = 51200, A1 = 5120 case has been broadened by a factor of 10 to 0 ≤ E ≤ 2000 in order toaccommodate the higher energies of the equilibria.
29

!3! !2! !! 0 ! 2! 3!0
240
480
720
960
1200
!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!"(1)
E
!3! !2! !! 0 ! 2! 3!
A3 = 51200A1 = 5120x(1) = 0.2z (1) = 1.05
Inset diagrams:Rod shapes
!3! !2! !! 0 ! 2! 3!0
240
480
720
960
1200
!3! !2! !! 0 ! 2! 3!!3! !2! !! 0 ! 2! 3!"(1)
E
!3! !2! !! 0 ! 2! 3!
A3 = 51200A1 = 5120x(1) = 0.2z (1) = 1.05
Inset diagrams:Plots of " vs. s
Figure 12: One of the bifurcation diagrams from Fig. 11, with sample rod configurations and plots of θvs. s superimposed.
30











![THE ARONSSON-EULER EQUATION FOR ABSOLUTELY ......Such minimizers are called absolutely minimizing Lipschitz extension, or absolute minimizers for short. In [1], Aronsson showed that](https://img.pdfslide.net/doc/110x75/607a00970aaae952d508037f/the-aronsson-euler-equation-for-absolutely-such-minimizers-are-called-absolutely.jpg)