Embed Size (px)
Citation preview

Emirates Journal for Engineering Research, 19 (3), 19-31 (2014)
(Regular Paper)
19
A COMPLETE REACTIVE POWER MANAGEMENT STRATEGY
USING ANT COLONY OPTIMIZATION ALGORITHM
Mohamed T. Mouwafi1, Ragab A. El-Sehiemy
2, Adel A. Abou El-Ela
1
and Abdel-Mohsen M. Kinawy1
1 Electrical Engineering Department; Faculty of Engineering, Minoufiya university
Shebin El Kom , 32511 - Egypt 2 Electrical Engineering Department; Faculty of Engineering, Kafrelsheikh university,
Kafrelsheikh, 33511 - Egypt - e-mail: [email protected]
(Received June 2014 and Accepted December 2014)
دارج انقذرج انكهزتيح غيز انفعانح، ف حالاخ انرشغيم انعاديح إنحم يشكهح يقرزححسرزاذيجيح ايقذو هذا انثحس
يرعذد (Ant Colony Optimization Algorithm) وانطارئح نهظى انكهزتيح تاسرخذاو خىارسو يسرعزج انم
هيار جهىد قضثا الأحال إنع حذوز انفعال إجزاء انرحكى انىقائتسرزاذيجيح انقرزحح يق الاذطث ىذ. الأهذاف
جزاءاخ إعرثار انذوال يرعذدج الأهذاف انرانيح: يفاقيذ خطىط انقم، سيادج إ. حيس ذى ف الأظح انكهزتائيح انجهذج
انحذد، وذقهيم انقذرج غيز انفعانح نىحذاخ انرىنيذ يع ذقهيم ذثاعذ جهىد قضثا الأحال ع انجهذقثم؛ انكافحح ي
قيىد يرغيزاخ دانح انهذف )جهىد قضثا انرىنيذ وانقذرج غيز انفعانح ي يصادر انرىنيذ الأخزي( الإعرثارالأخذ ف
فحص ذى .هذهيار انجإوانرغيزاخ انراتعح )جهىد قضثا الأحال وانقذرج غيز انفعانح نهىنذاخ( تالاضافح ان قيذ
دفي قيى إجزاء انرحكى انىقائ ف حالاخ انرشغيم انطارئح تذو إجزاء عهياخ ذصحيحيح، حيس لا ذىجذ ذجاوساخ
. حيس أوضحد انرائج أ أسهىب خىارسو يسرعزج قضية 03الاسرزاذيجيح انقرزحح عه ظاو ذى ذطثيق و.انظا
.ال ف حالاخ انرشغيم انطارئح انخرهفحإجزاء انرحكى انىقائ انفعقذرج عه انم أكثز
This paper proposes a generalized strategy for reactive power management problem during
normal and emergency operating conditions. The proposed problem is solved via multi-objective
ant colony optimization (ACO) algorithm. The proposed strategy solves the reactive power
management problem and is creating efficient control actions to mitigate the occurrence of
voltage collapse in stressed power systems. The proposed multi-objective functions are:
minimizing the transmission line losses, maximizing the control actions by; minimizing the
voltage deviation of load buses with respect to the specified bus voltages and minimizing the
reactive power generation at generation buses based on control variables under voltage collapse,
control and dependent variable constraints. In addition, the proposed control actions are checked
under emergency conditions without making corrective control actions, while all system
constraints are kept within their permissible limits. The proposed ACO-based strategy is tested to
the IEEE standard 30-bus test system. The results show the capability of the proposed ACO
algorithm for the maximal preventive control actions to eradicate different emergency condition
effects.
Keywords: Ant colony optimization algorithm, voltage collapse, corrective action, sensitivity
analysis, security
1. INTRODUCTION
Over the last few decades, reactive power
management problem is one of the main problems for
both power system planners and operators. So, it is
very important issue in the expansion planning and
operation of power systems. The purpose of reactive
power management problem focuses to improve the
voltage stability in the system and to optimize system
losses keeping the voltage security in concern, power
system. The interest in reactive power management
has been growing, mainly because of the way in
which energy supplier charge a customer for reactive
power especially after deregulation. Moreover, the
energy price is growing, what force the
industry plants and individual customers to
minimize energy consumption, including reactive
power. Also, modern power systems are operated
fairly close to their limits due to economic
competition and deregulation [1-3].
The reactive power management in power systems
aims at minimizing reactive power flow in supplying
and distribution systems, minimizing the charge for
reactive power as well as aspire to active energy
limitation, in result, reducing fare for electrical
energy. In the matter of fact, the energy providers
want their customers to compensate reactive power.
Energy suppliers avoid paying for reactive power as
much as possible [2]. The management of reactive

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
20 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
power resources generation facilities under control of
transmission operators plays an important role in
maintaining voltage stability and system reliability
[3]. The optimization of reactive power management
problem is a very complicated one, main features are:
nonlinear, discrete and large scale, the convergence of
the initial dependence. To make the system network
loss and node voltage offset, it must be combined
minimum power reactive power optimization model
of multi-objective under system certain constraints.
The main objectives of the reactive power
management problem are:
- Maintaining the power factor determined by the
energy supplier in order to reduce paying for
energy consumption.
- Improving power quality
- Decreasing transmission power losses
- Decreasing the cross section of the wires
- Decreasing transformer costs.
- Lowering voltage drop of supplying network and
increasing the transmission capability.
The shortage in reactive power sources or heavy
loading conditions may lead to the occurrence of
voltage collapse problem that occurs when the
voltage magnitudes violate their minimum threshold
of their reasonable limits of voltages. So, it is
necessary to simulate the voltage collapse problem
within the reactive power managing. Also, preparing
sufficient preventive control actions is very important
requirement to alleviate the effects of different
emergency conditions. The preventive control actions
are carried out in the pre-contingency situation by
optimizing the control variables using optimization
techniques to obtain the maximum preventive control
actions by operators or controllers which react to the
stress imposed on the system in order to mitigate the
voltage collapse. While, the corrective control is
carried out in post-contingency to stabilize unstable
power system in order to restore system solvability
Feng et al. [4] presented a comprehensive approach to
systematically compute the corrective and preventive
control strategies to mitigate power system voltage
collapse.
Capitanescn and Cutsem [5] revisited the use of
sensitivities to identify which parameter changes are
most effective to deal with unstable or low voltages.
The proposed sensitivities focused on the weakest bus
voltage, identified in practice as the one experiencing
the largest drop due to the load increase or the
contingency.
Also, Capitanescu et al. [6] proposed an approach
coupling security-constrained optimal power flow
with time-domain simulation to determine an optimal
combination of preventive and corrective controls
ensuring a voltage stable transition of the system
towards a feasible long-term equilibrium, if any of a
set of postulated contingencies occurred.
Lenoir et al. [7] presented a concept overview of an
automatic operator of electrical networks for real-time
alleviation of component overloads and increase of
system static loadability, based on state-estimator
data only.
Fu and Wang [8] proposed unified preventive control
approach considering voltage instability and thermal
overload.
Bruno and Scala [9] proposed a methodology to
assess preventive control actions through adjustments
of unified power flow controllers of (UPFCs)
reference signals that represented a nonlinear model.
The UPFC model included electrical equivalent
circuits, a local control scheme and a centralized
control scheme. Control actions evaluated through a
nonlinear optimization process.
Li et al. [10] proposed an Integer-coded
multiobjective Genetic Algorithm (IGA) applied to
the full Reactive-power Compensation Planning
problem considering both intact and contingent
operating states.
Ant colony optimization (ACO) algorithms were first
proposed by Dorigo [11]. ACO algorithms are based
on the behavior of real ants that are members of a
family of social insects. However, a group of explorer
ants leave the colony for finding the food source in a
randomly directions where they marked their routes
by laying a chemical substance on the ground. Other
ants attractive to the route that has the largest amount
of pheromone that decays with time. So that, a shorter
route will be found that has a largest amount of
pheromone than a longer route. So that, they are
found the shortest route between the nest and food
source by indirect communication media that called
pheromone that laid on the ground as a guide for
another ants. Through few recent years, ACO
algorithms are employed to solve optimization
problems in different fields with more accurate and
efficiently solution compared with conventional and
other modern optimization algorithms.
In the field of power systems, in power systems, the
ACO has been applied to solve the optimum
generation scheduling problems [12], Power system
restoration [13], unit commitment [14], economic
dispatch [15], and for the constrained load flow [16].
The authors in [17] developed a procedure using
ACO algorithm for optimal distributed generation
placement for enhancing protective device in
distribution systems. In literature, there are different
optimization algorithms for solving the reactive
power management problem including the ant colony
algorithm as presented in [18-22].
In our previous work, it was solved the optimal
reactive power dispatch (ORPD) problem using ACO
algorithm [23]. In [24], a multiobjective fuzzy based
procedure is proposed for preparing preventive
control actions from generator and transmission lines
to overcome the emergency effects based on the
optimal power dispatch model. In that paper, the
control actions are customized via maximizing the
possible reserve from generators and the critical lines.

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 21
But, it was carried out on active power problem and
didn't consider of reactive power resources on the
emergency mitigation.
So, in present work, a proposed complete strategy is
proposed for solving the reactive power management
problem considering the voltage collapse constraints
at both normal and abnormal operating conditions.
The proposed reactive power management is solved
via the ACO algorithm. The proposed procedure is
checked for alleviating the effects of different
emergency conditions. The proposed procedure is to
take by operator's hands to secure and economize
crossover of emergency conditions. Problem solving
is carried out on IEEE 30 bus test system.
2. PROBLEM FORMULATION
The ORPD problem can be expressed as an
optimization problem as:
Min f x (1)
Subject to : 0
0
g x
h x
(2)
where, f(x) is the objective function such as
transmission line losses, generators fuel costs,...etc,
g(x), h(x) represent the equality and inequality
constraints, respectively and x is the vector of the
control variables.
The reactive power optimization mathematical model
should include object function, variable constraint
equations and power constraint equations. Then, the
objective function f(x) is the transmission line losses
that are a function in the generator voltages and
switchable reactive power, which are defined as:
1
1
/
/
N
L L G G
G
N
L SW SW
SW
Min P P V V
P Q Q
G
SW
(3)
where, ∆PL is the objective function of the change in
transmission line losses, ∆VG and ∆QSW are the
changes in the control variables of generation voltages
and switchable reactive power, respectively, NG is the
number of generation buses, NSW is the number of
buses which the switchable reactive sources are
located.
The changes in transmission line losses with respect
to changes in generator voltage can be derived based
on the load flow equations as:
i i iS V I (4)
Also;
i i iS P jQ (5)
From equations 4 and 5, the active power at bus i can
be formulated as:
1
cos sinN
i i ij ij ij ij j
j
P V G B V
(6)
At i = j, equation 6 can be rewritten as:
2
1,
cos sinN
i i ii i ij ij ij ij j
j j i
P V G V G B V
(7)
Now, the values of ∂Pi /∂Vi and ∂Pj /∂Vi can be
calculated by differentiating equation 7 as:
1,
/ 2 cos sinN
i i i ii ij ij ij ij ji NGj j i
P V V G G B V
(8)
/ cos sinj i j ji ij ji ijj NGP V V G B
(9)
where, Yij = -1 / Zij = Gij +j Bij is the line admittance
between buses i and j.
δi and δj are the angles of the voltages at buses i and
j, respectively.
Also, the change in transmission line losses due to
changes in switchable reactive power can be written
as:
/ / /L SW L SW SW SWP Q P V V Q (10)
where, ∂VSW / ∂QSW is the change of switchable
voltage buses with respect to change in switchable
reactive power at that bus, and determined based on
sensitivity that will be illustrated in the next Section.
The objective function (3) is subjected to the
following constraints:
a) Control variable constraints
Generation voltage constraints
The change in generator voltage must be within their
permissible limits as:
min max
G G GV V V (11)
where,
min min init
G G GV V V and max max init
G G GV V V
VGinit
is the initial value of the generator voltage at
each generator bus.
VGmin
and VGmax
are the minimum and maximum of
generation voltages, respectively.
∆VGmin
and ∆VGmax
are the minimum and maximum
changes in generation voltages, respectively.
Switchable reactive power constraints
The change in switchable reactive power must be
within their permissible limits as:
min max
SW SW SWQ Q Q (12)
where,
min min init
SW SW SWQ Q Q and max max init
SW SW SWQ Q Q

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
22 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
QSWinit
is the initial value of the switchable reactive
power.
QSWmin
and QSWmax
are the minimum and maximum of
switchable reactive power, respectively.
∆QSWmin
and ∆QSWmax
are the minimum and maximum
changes in switchable reactive power,
respectively.
a) Dependent variable constraints
Load voltage constraints
The voltage at each load bus must be within their
permissible limits as:
min max
L L LV V V (13)
where,
min min init
L L LV V V and
max max init
L L LV V V
VLinit
is the initial value of the voltage at each load
bus.
VLmin
and VLmax
are the minimum and maximum of
load bus voltages, respectively.
∆VLmin
and ∆VLmax
are the minimum and maximum
changes in load bus voltages, respectively.
Generation reactive power constraints
The reactive power of each generator must be within
their permissible limits as:
min max
G G GQ Q Q (14)
where,
min min init
G G GQ Q Q and
max max init
G G GQ Q Q
QGinit
is the initial value of reactive power at
generation buses.
QGmin
and QGmax
are the minimum and maximum
values of reactive power at generation buses,
respectively.
∆QGmin
and ∆QGmax
are the minimum and maximum
changes in reactive power at generation buses,
respectively.
3. VOLTAGE COLLAPSE
CONSTRAINT
Based on Thevenin's theorem that provides an
extremely valuable means for reducing a complex
circuit to a simple circuit containing an ideal voltage
source in series with equivalent impedance, thus, the
complex power circuit shown in Figure 1(a) can
always be reduced to the Thevenin's equivalent as
shown in Figure 1(b). From this circuit, the real
power transmitted to load can be calculated as:
2
2
L i i
i TH TH
i ii i ii
iTH
i ii
P real V I
Z E Ereal
Z Z Z Z
Zreal E
Z Z
(15)
To obtain the maximum power transmitted (PLmax
) to
the load, ∂PL/∂Zi is calculated and equals to zero as
follows:
0
i
L
Z
P
02
4
222
iii
iiiTHiTHiii
ZZ
ZZEZEZZreal
Hence, the maximum power transmitted to the load
occurs at Zi = Zii can be calculated as:
ii
THL
Z
ErealP
4
2max (16)
For preventing the occurrence of the voltage collapse
in power systems, it should satisfy the following
inequality constraint:
NiZZ iii ,....1;0.1/ (17)
where,
Zii is the ith
diagonal elements of the Thevenin's
equivalent impedance matrix.
N is the number of load buses.
Zi is the load impedance, which is calculated as:
iLii SVZ /2
(18)
where, |VLi| is the magnitude of the load voltage under
normal and emergency conditions at bus i. Si* is the
conjugate of the apparent power at bus i.
4. PROPOSED SENSITIVITY
PARAMETERS
The fast decoupled power flow (FDPF) method is one
of the load flow methods that assumed the changes in
active power flows due to changes in voltage phase
angles are higher than the changes due to voltage
Complex
Circuit
Bus i
ZL
Ii
Vi
ZL=Zi
Bus i ZTH = Zii
ETH
(a) Original circuit (b) Thevenin equivalent circuit
Figure 1. Reduction network using Thevenin's theorem

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 23
magnitudes. On the other hand, the changes in
reactive power flows due to changes in voltage
magnitudes are higher than the changes due to voltage
phase angles. So, it can be written as:
[∆P/V] = [B'] [∆δ] and [∆Q/V] = [B"] [∆V]
where, [∆P] and [∆Q] are the vectors of active and
reactive power mismatches, respectively. [B'] and
[B"] are the susceptance matrices. [∆δ] and [∆V] are
the vectors of changes in voltage angles and
magnitudes, respectively.
In this paper, the ORPD problem is based on the
second equation of the FDPF as:
[∆Q/V]=[B"][∆V] (19)
where, B" is the susceptance matrix as:
1"
1,
" "
1/ ; 1,2,....., 1
1/ ; , 1,2,....., 1
N
ii ij
j j i
ij ji ij
B X i N
B B X i j N
where, Xij is the line reactance between buses i and j.
Now, equation 19 can be rewritten in terms of control
and dependent variables as:
/
/
G G GGG GL
LG LLL L L
Q V VB B
B BQ V V
(20)
The sensitivity parameters between control and
dependent variables can be derived based on equation
20 as follows:
a) The load bus voltages related to control
variables
No changes in the reactive power at load-bus
(∆QL=0)
The sensitivity parameters relating the changes in
load-bus voltages due to the changes in generation-bus
voltages are given as:
GLGLLL VBBV 1
G
L
GL VSV (21)
where, LGLL
L
G BBS1
No changes in generation voltages (∆VG=0)
The sensitivity parameters relating to the changes in
load-bus voltages due to the changes in switchable
reactive power sources can be given as:
SW
L
SWL QSV (22)
where, 11 SWLL
L
SW VBS and, VSW is the vector
of bus voltages that connected to VAR sources.
b) Generation reactive power related to control
variables
The sensitivity parameters relating to the changes
in generated reactive power due to the changes in
generation-bus voltages can be written as:
LGLGGGGG VBVBVQ / (23)
By substituting from equation 21 into 23, we obtain:
G
L
GGLGGGGG VSBVBVQ /
G
G
GG VSQ (24)
where, L
GGLGGG
G
G SBBVS
The sensitivity parameters relating to the changes
in generated reactive power due to the changes in
switchable reactive power sources can be written
as:
LGLL
L
GGGGG VBVSBVQ 1
/ (25)
By substituting from equation 22 into 25, we get:
1
/ L LG G GG G GL SW SWQ V B S B S Q
SW
G
SWGG QSVQ / (26)
where, L
SWGL
L
GGGG
G
SW SBSBVS 1
Now, the proposed sensitivity between the control
and the dependent variables can be formulated based
on equations 21, 22, 24 and 26 in a compact matrix
form as:
L L
GL G SW
G GG SWG SW
VV S S
Q QS S
(27)
5. PROPOSED CONTROL ACTIONS
The proposed control actions are carried out as multi-
objective functions in the pre-contingency situation
by optimizing the control variables to avoid any
violation limit, which may occur at the emergency
condition.
a) Preventive control actions of load voltages
based on each generation voltage
The maximal effect of the preventive control actions
of load voltages obtained by minimizing the voltage
deviation with respect to the specified voltage can be
expressed as:
Max. YVLi
LiG
L
G
init
LiLsp YVVSVV . (28)
where, VLisp is the specified load voltage (equals to
one); VLiinit
is the initial value of load voltage at bus i;

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
24 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
YVLi is the maximal Preventive control actions due to
decrease the voltage deviation at load buses.
b) Preventive control actions of load voltages
based on each switchable reactive power
Equation 28 can be restated as a function of
switchable reactive power as:
Max. YVL
Subject to:
LiSW
L
SW
init
LiLsp YVQSVV . (29)
c) Preventive control actions of load voltages
based on all of generation voltage, switchable
reactive power and all of them
Equations 28 and 29 can be composed as multi-
objective functions to obtain the maximal preventive
control actions as:
Max. YVLi
SWGLiLi
init
LiLsp NNiYVVVV ,...,2,1,,...,2,1;. (30)
where, ∆VLi is the incremental change of load voltage
based on control variables using sensitivity
parameters of reactive power.
d) Preventive control actions of all generation
reactive power based on each generation
voltage
The maximal effect of the preventive control actions
of generation reactive power obtained by minimizing
the generation reactive power can be expressed as:
Max. YQGi
GiG
G
G
init
Gi YQVSQMin (31)
where, QGiinit
is the initial value of generation reactive
power of unit i; YQGi is the maximal Preventive
control actions due to decrease the reactive power at
generation buses.
e) Preventive control actions of all generation
reactive power based on each switchable
reactive power
Equation 31 can be restated as a function of
switchable reactive power as:
Max. YQGi
GiSW
G
SW
init
Gi YQQSQMin (32)
f) Preventive control actions of all generation
reactive power based on all of generation
voltage, switchable reactive power and all of
them
Equations 31 and 32 can be composed as multi-
objective functions to obtain the maximal preventive
control actions as:
Max. YQGi
SWGGiGi
init
Gi NNiYQQQMin ,...,2,1,,...,2,1; (33)
where, ∆QGi is the incremental change of generation
reactive power based on control variables using
sensitivity parameters of reactive power.
6. MATHEMATICAL MODEL OF ACO
ALGORITHM
A random amount of pheromone is deposited in each
rout after each ant completes it is tour, anther antes
attract to the shortest route according to the
probabilistic transition rule that depends on the
amount of pheromone deposited and a heuristic guide
function as equal to the inverse of the distance
between beginning and ending of each route. The
probabilistic transition rule of ant k to go from city i
to city j can be expressed as in Traveling Salesman
Problem (TSP) [13] as:
ki
qiqiq
ijijkij Nqj
tt
tttP
,;
)()(
)()()(
(34)
where, τij is the pheromone trail deposited between
city i and j by ant k, ηij is the visibility or sight and
equal to the inverse of the distance or the transition
cost between city i and j ( ηij = 1/dij ). α and β are two
parameters that influence the relative weight of
pheromone trail and heuristic guide function,
respectively. If α=0, the closest cities are more likely
to be selected that corresponding to a classical greedy
algorithm. On the contrary, if β=0, the probability
will be depend on the pheromone trial only. These
two parameters should be tuned with each other,
Dorigo [12] founds experimentally the good values of
α and β are 1 and 5, respectively, q is the cities that
will be visited after city i. While, Nrk is a tabu list in
the memory of ants that recode the cities which will
be visited to avoid stagnations After each tour is
completed, a local pheromone update is determined
by each ant depending on the route of each ant as in
equation 35, after all ants attractive to the shortest
route, a global pheromone update is considered to
show the influence of the new addition deposits by
the other ants that attractive to the best tour as shown
in equation 36:
)(1)1( tt ijij (35)
)()(1)1( ttt ijijij (36)
where, τij (t+1) is the pheromone after one tour or
iteration, ρ is the pheromone evaporation constant
equals to 0.5 as a good value by Dorigo in [8], ε is the
elite path weighting constant, τo = 1 / dij is the
incremental value of pheromone of each ant. While,
∆τij is the amount of pheromone for elite path as:

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 25
( ) 1/ij bestt d (37)
where, d best is the shortest tour distance found as in
TSP.
7. ACO ALGORITHM FOR ORPD
PROBLEM
ACO algorithm is applied to solve the ORPD problem
as an optimization technique with control and
dependent variable constraints. Also, it is applied to
solve a multi-objective functions to obtain the
maximal effect of preventive control action based on
control variables under control and dependent
variable constraints in addition to voltage collapse
constraint where artificial ants travels in search space
to find the shortest route that having the strongest
pheromone trail and a minimum objective function.
Our objectives in this paper are: minimize the power
losses as described in (3) with control variable
constraints in (11) and (12), and dependent variable
constraints in (13) and (14). Also, maximize
preventive control actions with equations 28-33 with
the same control and dependent variable constraints
with addition voltage collapse constraint in equation
17. So that, the heuristic guide function is the inverse
of each objective function for each ant that positioned
in the reasonable limit of the control variable to the
visibility of each ant. While, heuristic guide function
of the problem is the inverse of the total value of
objective functions at iteration t +1, e.g., for ORPD
problem, the heuristic guide function can be
expressed as:
1
1
( 1) 1/ /
/
N
L G G
G
N
L SW SW
SW
t P V V
P Q Q
G
SW
(38)
In ACO algorithm, a search space creates with
dimensions of stages on number of control variables
and states or the randomly distributed values of
control variables within a reasonable threshold.
Artificial ant's leaves colony to search randomly in
the search space based on the probability in (34) to
complete a tour matrix that consists of the positions
of ants with the same dimension of the search space.
Then, tour matrix is applied on the objective function
to find a heuristic guide function to find the best
solution and update local and global pheromone to
begin a next iteration. System parameters are adjusted
by trial and error to find the best values of theses
parameters. The ACO algorithm can be applied to
solve the proposed problem using the following steps:
Step 1: Initialization
Insert the lower and upper boundaries of each control
variable [(∆VGmin
, ∆VGmax
) and (∆QSWmin
, ∆QSWmax
)],
system parameters, and create a search space with a
dimensions of number of control variables (∆VG,
∆QSW) and the length of randomly distributed values
with the same dimension of the initial pheromone that
contains elements with very small equal values to
give all ants with the same chance of searching.
Step 2: Provide first position
Each ant is positioned on the initial state randomly
within the reasonable range of each control variable
in a search space with one ant in each control variable
in the length of randomly distributed values.
Step 3: Transition rule
Each ant decide to visit a next position in the range of
other control variables according to the probability
transition rule in equation 34 that depends on the
amount of pheromone deposited and the visibility that
is the inverse of objective function. Where, the effect
of pheromone and visibility on each other depends on
the two parameters α and β.
Step 4: Local pheromone updating
Local updating pheromone is different from ant to
other because each ant takes a different route. The
initial pheromone of each ant is locally updated as in
equation 35.
Step 5: Fitness function
After all ants attractive to the shortest path that
having a strongest pheromone, the best solution of the
objective function is obtained.
Step 6: Global pheromone updating
Amount of pheromone on the best tour becomes the
strongest due to attractive of ants for this path.
Moreover, the pheromone on the other paths is
evaporated in time.
Step 7: Program termination
The program will be terminated when the maximum
iteration is reached or the best solution is obtained
without the ants stagnations.
8. APPLICATIONS
a) Test Systems
The IEEE 30-bus standard test system [25] is used to
show the capability of the proposed technique to find
the ORPD problem and maximal preventive control
actions using ACO algorithm. The MVA base is
taken 100 and the cost of power losses is assumed
0.07 E.P. /KWh while, the cost of reactive power is
assumed 15 E.P. /KVar. The best values of ACO
algorithm parameters are α =1, β=5 ρ=0.5 and ε=5.
The load flow is done using the Newton-Raphson
load flow to get the initial values of power loss that
are 17.528 and 22.811 MW for 30-bus system.
Seven cases have been studied to obtain the maximal
preventive control actions which have the following
definitions:
Case (1): ACO algorithm is applied for the ORPD
problem considering the minimization of
transmission power losses.

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
26 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
Case (2): ACO algorithm is applied for maximizing
the preventive actions of load voltages
based on each generation voltage,
individually.
Case (3): ACO algorithm is applied for maximizing
the preventive actions of load voltages
based on each switchable reactive power,
individually.
Case (4): ACO algorithm is applied for maximizing
the preventive actions of load voltages
based on all of generation voltages,
switchable reactive power and all of them.
Case (5): The ACO algorithm is applied for
maximizing the preventive actions of all
generation reactive power based on each
generation voltage, individually.
Case (6): The ACO algorithm is applied for
maximizing the preventive actions of all
generation reactive power based on each
switchable reactive power, individually.
Case (7): The ACO algorithm is applied for
maximizing the preventive actions of all
generation reactive power based on all of
generation voltages, switchable reactive
power and all of them.
The considered emergency conditions that may occur
are:
a. Forced outage of line 2.
b. Unexpected outage of generation number 5.
Six cases are considered for post emergency
conditions and corrective actions due to emergency
conditions as:
Case (8): Load flow calculations for post-emergency
conditions depending on the initial state.
Case (9): Load flow calculations for post-emergency
conditions depending on the ORPD
(Case1).
Case (10): Load flow calculations for post-emergency
conditions depending on the maximum
preventive actions with the minimal
transmission line losses from Cases 2-7.
Case (11): Corrective actions with ORPD solutions
depending on case 8 as initial values.
Case (12): Corrective actions with ORPD solutions
depending on case 9 as initial values.
Case (13): Corrective actions with ORPD solutions
depending on case 10 as initial values).
B) Results and discussion
B.1) Normal conditions
Table 1 shows the results of the initial, ORPD
problem (Case 1) and the preventive control actions
of all load voltages based on each generation voltage
(Case 2). However, Cases (2-a)-(2-f) represent the
maximal effect of the preventive control actions from
generation voltage 1, 2, 5, 8, 11 and 13, respectively
while, all the system constraints are satisfied. In Case
1, the violation of generation reactive power at bus 13
is removed, while the transmission line losses (P.L)
are decreased by about 6.9% with respect to the initial
condition. In Cases (2-a)-(2-f), the maximal
preventive control actions with minimum line losses
and cost of power loss (CPL) obtained in case (2-b),
while case (2-a) has maximal preventive actions with
minimum root mean square of load-bus voltage
deviation (V.Dr.m.s) than other cases. Case (2-c) has
maximum preventive actions with maximum reactive
power reserve (RPR) and minimum cost of the
connected reactive power (CRP). However, line
losses are increased than Case 1.
Table 1. Preventive control actions of Cases 1 and 2
Variables Min.
Limit
Max.
Limit
Initial Case (1)
ORPD
Case (2)
2-a 2-b 2-c 2-d 2-e 2-f
Vg 1 1.00 1.10 1.050 1.0120 1.0952 1.0623 1.0786 1.0758 1.0804 1.0724
Vg 2 0.95 1.05 1.034 1.0217 1.0377 1.0315 1.0365 1.0269 1.0151 1.0379
Vg 5 0.95 1.05 1.006 1.0137 1.0352 1.0317 1.0358 1.0011 1.0062 1.0306
Vg 8 0.95 1.05 1.023 1.0148 1.0183 1.0267 1.0327 1.0085 1.0329 1.0104
Vg 11 1.00 1.10 1.091 1.0430 1.0568 1.0784 1.0546 1.0446 1.0449 1.0631
Vg 13 1.00 1.10 1.099 1.0380 1.0216 1.0516 1.0258 1.0662 1.0235 1.0662
Qsw 10 0.00 0.20 0.000 0.1023 0.1060 0.1547 0.1027 0.1027 0.1168 0.1723
Qsw 17 0.00 0.15 0.000 0.0886 0.0552 0.1426 0.0200 0.0910 0.0198 0.1166
Qsw 24 0.00 0.10 0.000 0.0822 0.0541 0.0023 0.0145 0.0338 0.0435 0.0652
QG 1 -0.30 1.00 -0.026 -0.230 0.3231 0.3821 0.2237 0.3731 0.2134 0.5874
QG 2 -0.40 0.50 -0.103 -0.187 -0.2773 -0.3311 -0.2451 -0.3286 -0.2324 -0.3921
QG 5 -0.20 0.60 0.036 0.511 0.2365 0.2921 0.2342 0.2683 0.1881 0.4226
QG 8 -0.20 0.70 0.048 0.185 0.1255 0.1458 0.1105 0.1425 0.1052 0.19501
QG 11 -0.06 0.34 0.308 0.236 0.3271 0.3294 0.3378 0.3317 0.3351 0.33951
QG 13 0.06 0.37 0.379* 0.335 0.3756 0.3684 0.3700 0.3700 0.3689 0.34621
P.L. (pu.) -- -- 0.17528 0.1631 0.1761 0.1728 0.1732 0.1756 0.1744 0.1745
CPL (EP) -- -- 1227 1141.7 1232.8 1209.6 1212.1 1229 1220.8 1221.6
(V.D.)rms -- -- 0.0182 0.0135 0.0127 0.0138 0.0170 0.0137 0.0142 0.0178
RPR -- -- 0.45 0.1769 0.2339 0.1504 0.3098 0.2230 0.2699 0.0960
CRP ( EPx103) -- -- 0.00 409.65 324.107 449.42 210.27 341.17 270.09 531
* Denotes violation of its limit

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 27
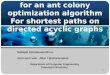
Table 2, Figures 2 and 3 show the maximal effect of
preventive actions for cases (3) and (4). For case (3),
the maximum preventive actions of load voltages
based on each switchable reactive power at buses 10,
17 and 24, respectively. Case (3-b) gives the
maximum preventive actions with minimum power
losses, CPL, while case (3-a) gives maximum
preventive actions with minimum V.Dr.m.s. Case (3-c)
gives maximum preventive actions with maximum
RPR and minimum CRP. However, line losses are
increased than case (1). For case (4), the maximum
preventive actions of load voltages based on all
generation voltages, all switchable reactive power and
all both of them. In this case, the system operators can
choice between taking more the preventive control
actions from all system generation voltages or from
all switchable reactive power or from both of them,
simultaneously. Figures 2 and 3 show the dependent
variables of load-bus voltages for cases (3) and (4),
respectively.
3 4 6 7 9 10 12 1415161718192021222324252627282930VLmin.
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
VLmax.
Load buses
Load b
us v
oltage (
pu.)
Vsp.VL (case 3.a)VL (case 3.b)VL (case 3.c)
Figure 1. Load voltages of case 3
3 4 6 7 9 10 12 14151617181920212223242526272829300.995
1
1.005
1.01
1.015
1.02
1.025
1.03
1.035
1.04
1.045
VLmax.
Load buses
Load b
us v
oltage (
pu.)
Vsp.VL (case 4.a)VL (case 4.b)VL (case 4.c)
Figure 2. Load voltages of case 4
Table 3 and Figure 4 show the results of case (5) that
obtained dependent on the maximal effects of
preventive actions of all generation reactive power
based on each generation voltage, while the system
constraints are satisfied. From this Table, case (5-d)
gives the maximum preventive actions based on
generation voltage at bus 8 with minimum
transmission line losses and CPL. While, case (5-a)
has maximal effect preventive actions with minimum
V.Dr.m.s than other cases. Case (5-e) has maximum
preventive actions with maximum RPR and minimum
CRP. However, line losses are increased than case
(1). Figure 4 shows the dependent variables of load-
bus voltages this case.
3 4 6 7 9 10 12 14151617181920212223242526272829300.99
1
1.01
1.02
1.03
1.04
VLmax.
Load buses
Load b
us v
oltage (
pu.)
Vsp.VL (case 5.a)VL (case 5.b)VL (case 5.c)VL (case 5.d)VL (case 5.e)VL (case 5.f)
Figure 3. Load voltages of case 5
Table 4 shows the maximal effect of preventive
actions for cases (6) and (7). For case (6), the
maximum preventive actions of all generation
reactive power based on each switchable reactive
power at buses 10, 17 and 24, respectively. Case (6-a)
gives the maximum preventive actions with minimum
power losses, CPL and V.Dr.m.s. While, case (6-c)
gives the maximum effect preventive actions with
maximum RPR and minimum CRP. However, line
losses are increased than case (1). For case (7), the
maximum preventive actions of all generation
reactive power based on all generation voltages, all
switchable reactive power and all both of them, In
this case, the system operators can choice between
taking more the preventive control actions from all
system generation voltages or from all switchable
reactive power or from both of them, simultaneously.
b.2) Emergency conditions
Unexpected outage of transmission line
Table 5 shows the post emergency condition cases
and corrective actions based on the pre-emergency
cases of initial, case (1) and case (2-b) that have the
maximal preventive actions with minimal line losses.
From Table 5, cases 8-10 based on initial, case (1)
and (2-b), respectively, while cases 11-13 show the
corrective actions based on initial values of control
variables of cases 8-10, respectively. From these
cases, it can be shown that, case 8 has violation limits
in generation reactive power at buses 5 and 13. Also,
case 9 has violation limits in generation reactive

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
28 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
power at bus 1 in addition voltage collapse at buses
26 and 30. While, case 10 hasn't any violations in
control or dependent variables, this means that the
preventive control actions are capable of avoid
voltage collapse under emergency conditions. Case
13 has a minimum transmission line loses and V.Dr.m.s
than cases 11 and 12, while case 12 has a maximum
RPR with minimum CRP. Figure 6 shows the
dependent variables of load-bus voltages for
corrective actions of cases 11-13, all of these voltages
are within their permissible limits.
Unexpected outage of generation unit
Table 6 shows the post emergency condition cases
and corrective actions based on the pre-emergency
cases of initial, case (1) and case (2-b) that have the
maximal preventive actions with minimal line losses.
From this table, case 8 has a violation limit in
generation reactive power at bus 13. Also, case 9 has
violation limits in generation reactive power at bus 1
in addition voltage collapse at buses 26 and 30.
While, case 10 hasn't any violations in control or
dependent variables, this means that the preventive
control actions are capable of avoid voltage collapse
under emergency conditions. Case 12 has a minimum
transmission line loses, CPL, while case 13 has a
minimum V.Dr.m.s. Case 11 has a maximum RPR with
minimum CRP than cases 12 and 13.
Table 2. Proposed preventive control actions of Cases 3 and 4
Variables Min.
Limit
Max.
Limit
Initial Case (3) Case (4)
3-a 3-b 3-c 4-a 4-b 4-c
Vg 1 1.00 1.10 1.050 1.0761 1.0832 1.0733 1.0893 1.0689 1.0932
Vg 2 0.95 1.05 1.034 1.0385 1.0195 1.0378 1.0211 1.0115 1.0235
Vg 5 0.95 1.05 1.006 1.0341 1.0333 1.0235 1.0135 1.0188 1.0333
Vg 8 0.95 1.05 1.023 1.0315 1.0105 1.0152 1.0192 1.0372 1.017
Vg 11 1.00 1.10 1.091 1.0447 1.0693 1.0578 1.0249 1.0379 1.0693
Vg 13 1.00 1.10 1.099 1.0536 1.0216 1.0762 1.0647 1.0517 1.0216
Qsw 10 0.00 0.20 0.000 0.1614 0.1737 0.1545 0.0328 0.1825 0.1075
Qsw 17 0.00 0.15 0.000 0.1377 0.1354 0.1268 0.0294 0.1351 0.0751
Qsw 24 0.00 0.10 0.000 0.0478 0.0816 0.0479 0.0381 0.0389 0.0841
QG 1 -0.30 1.00 -0.026 0.2667 0.5194 0.2416 0.2393 0.5332 0.4516
QG 2 -0.40 0.50 -0.103 -0.2683 -0.3983 -0.2384 -0.2491 -0.3953 -0.3621
QG 5 -0.20 0.60 0.036 0.2282 0.3752 0.1973 0.2163 0.3721 0.3068
QG 8 -0.20 0.70 0.048 0.1214 0.1817 0.1112 0.1116 0.1786 0.1592
QG 11 -0.06 0.34 0.308 0.3286 0.3400 0.3316 0.3308 0.3400 0.3382
QG 13 0.06 0.37 0.379* 0.3682 0.3634 0.3586 0.3700 0.3627 0.3498
P.L. (pu.) -- -- 0.17528 0.1741 0.1738 0.1758 0.1771 0.1730 0.1764
CPL (EP) -- -- 1227 1218.6 1216.5 1230.4 1239.9 1210.9 1234.5
(V.D.)rms -- -- 0.0182 0.0239 0.0251 0.0280 0.0165 0.0262 0.0197
RPR -- -- 0.45 0.1030 0.0593 0.1208 0.3494 0.0935 0.1833
CRP ( EPx103) -- -- 0.00 520.44 586 493.82 150.89 534.77 399.99
Table 3. Proposed control actions of case 5
Variables Min.
Limit
Max.
Limit
Initial Case (5)
5-a 5-b 5-c 5-d 5-e 5-f
Vg 1 1.00 1.10 1.050 1.0937 1.0905 1.0772 1.0741 1.0725 1.0716
Vg 2 0.95 1.05 1.034 1.0381 1.0351 1.0383 1.0331 1.0450 1.0411
Vg 5 0.95 1.05 1.006 1.0385 1.0325 1.0389 1.0347 1.0383 1.0357
Vg 8 0.95 1.05 1.023 1.0414 1.0442 1.0414 1.0472 1.0412 1.0291
Vg 11 1.00 1.10 1.091 1.0654 1.0579 1.0935 1.0373 1.0932 1.0581
Vg 13 1.00 1.10 1.099 1.0271 1.0512 1.0635 1.0632 1.0416 1.0774
Qsw 10 0.00 0.20 0.000 0.1532 0.1151 0.19821 0.1303 0.0835 0.1769
Qsw 17 0.00 0.15 0.000 0.1120 0.1246 0.1030 0.1131 0.0548 0.0553
Qsw 24 0.00 0.10 0.000 0.0055 0.0443 0.0762 0.0258 0.0436 0.0909
QG 1 -0.30 1.00 -0.026 0.4971 0.5341 0.6195 0.4421 0.2893 0.5337
QG 2 -0.40 0.50 -0.103 -0.3826 -0.400 -0.3893 -0.3589 -0.2855 -0.3798
QG 5 -0.20 0.60 0.036 0.3553 0.3921 0.4265 0.3227 0.2293 0.3621
QG 8 -0.20 0.70 0.048 0.1721 0.1793 0.2273 0.1625 0.1186 0.2539
QG 11 -0.06 0.34 0.308 0.3357 0.3285 0.3400 0.3371 0.3296 0.3183
QG 13 0.06 0.37 0.379* 0.3683 0.3699 0.3634 0.3700 0.3700 0.3482
P.L. (pu.) -- -- 0.17528 0.1779 0.1788 0.1785 0.1746 0.1755 0.1753
CPL (EP) -- -- 1227 1245.3 1251.2 1249.3 1222.3 1228.5 1227.1
(V.D.)rms -- -- 0.0182 0.0204 0.0215 0.0226 0.0218 0.0263 0.0270
RPR -- -- 0.45 0.1793 0.1659 0.0726 0.1808 0.2681 0.1269
CRP ( EPx103) -- -- 0.00 406.03 426.13 566.18 403.88 272.91 484.65

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 29
Table 4. Proposed control actions of case 6 and 7
Variables Min.
Limit
Max.
Limit
Initial Case (6) Case (7)
6-a 6-b 6-c 7-a 7-b 7-c
Vg 1 1.00 1.10 1.050 1.0612 1.0735 1.0893 1.0927 1.0724 1.0833
Vg 2 0.95 1.05 1.034 1.0282 1.0272 1.0287 1.0381 1.0325 1.0467
Vg 5 0.95 1.05 1.006 1.0381 1.0284 1.0255 1.0385 1.0283 1.0272
Vg 8 0.95 1.05 1.023 1.0437 1.0314 1.0384 1.0414 1.0214 1.0252
Vg 11 1.00 1.10 1.091 1.0695 1.0285 1.0267 1.0633 1.0253 1.0452
Vg 13 1.00 1.10 1.099 1.0583 1.0617 1.0783 1.0267 1.0752 1.0758
Qsw 10 0.00 0.20 0.000 0.1813 0.1667 0.1379 0.0973 0.1872 0.1513
Qsw 17 0.00 0.15 0.000 0.1287 0.1420 0.1146 0.1030 0.1390 0.1394
Qsw 24 0.00 0.10 0.000 0.0267 0.0247 0.0338 0.0035 0.0218 0.0653
QG 1 -0.30 1.00 -0.026 0.5355 0.5653 0.5791 0.3225 0.5682 0.3295
QG 2 -0.40 0.50 -0.103 -0.3862 -0.3653 -0.400 -0.3162 -0.400 -0.3210
QG 5 -0.20 0.60 0.036 0.4132 0.3735 0.4115 0.2337 0.3924 0.2661
QG 8 -0.20 0.70 0.048 0.2673 0.1667 0.3584 0.1125 0.2398 0.1538
QG 11 -0.06 0.34 0.308 0.3218 0.3395 0.3372 0.3400 0.3385 0.3400
QG 13 0.06 0.37 0.379* 0.3596 0.3671 0.3598 0.3700 0.3651 0.3700
P.L. (pu.) -- -- 0.17528 0.1730 0.1734 0.1788 0.1773 0.1736 0.1776
CPL (EP) -- -- 1227 1210.7 1214.1 1251.5 1241.1 1215.3 1242.9
(V.D.)rms -- -- 0.0182 0.0304 0.0318 0.0333 0.0228 0.0350 0.0283
RPR -- -- 0.45 0.1133 0.1167 0.1638 0.2462 0.1021 0.0940
CRP ( EPx103) -- -- 0.00 505.03 499.9 429.38 305.67 521.87 533.95
Table 5. Proposed procedures for forced line 2 outage
Variables Min.
Limit
Max.
Limit
Pre-emergency Post-emergency condition
Initial Case (1) Case (2-b) Case (8) Case (9) Case (10) Case (11) Case (12) Case (13)
Vg 1 1.00 1.10 1.050 1.0120 1.0623 1.050 1.0120 1.0623 1.0716 1.0637 1.0689
Vg 2 0.95 1.05 1.034 1.0217 1.0315 1.034 1.0217 1.0185 1.0172 1.0213 1.0156
Vg 5 0.95 1.05 1.006 1.0137 1.0317 1.006 1.0137 1.0317 1.0148 1.0285 1.0356
Vg 8 0.95 1.05 1.023 1.0148 1.0267 1.023 1.0148 1.0267 1.0253 1.0148 1.0224
Vg 11 1.00 1.10 1.091 1.0430 1.0784 1.091 1.0430 1.0784 1.0719 1.0831 1.0823
Vg 13 1.00 1.10 1.099 1.0380 1.0516 1.099 1.0380 1.0516 1.0413 1.0552 1.0618
Qsw 10 0.00 0.20 0.000 0.1023 0.1547 0.000 0.1023 0.1547 0.0985 0.1264 0.1475
Qsw 17 0.00 0.15 0.000 0.0886 0.1426 0.000 0.0886 0.1426 0.1482 0.1443 0.1356
Qsw 24 0.00 0.10 0.000 0.0822 0.0023 0.000 0.0822 0.0023 0.0563 0.0117 0.0118
QG 1 -0.30 1.00 -0.026 -0.230 0.3821 0.1335 -0.3085* 0.3935 0.5812 0.3972 0.3562
QG 2 -0.40 0.50 -0.103 -0.187 -0.3311 0.0450 0.4017 -0.3820 -0.3181 -0.3361 -0.3351
QG 5 -0.20 0.60 0.036 0.511 0.2921 -0.2365* -0.0388 0.0266 0.4186 0.3586 0.3263
QG 8 -0.20 0.70 0.048 0.185 0.1458 0.4816 0.5905 0.5405 0.5937 0.2148 0.4618
QG 11 -0.06 0.34 0.308 0.236 0.3294 0.3095 0.2037 0.2785 0.3379 0.3351 0.3351
QG 13 0.06 0.37 0.379* 0.335 0.3684 0.3931* 0.2660 0.2567 0.3641 0.3586 0.3584
P.L. (pu.) -- -- 0.17528 0.1631 0.1728 0.18227 0.1823 0.18187 0.17431 0.17968 0.17387
CPL (EP) -- -- 1227 1141.7 1209.6 1275.9 1276.1 1273.1 1220.2 1257.8 1217.1
(V.D.)rms -- -- 0.0182 0.0135 0.0138 0.0197 0.0306 0.0202 0.0171 0.0130 0.0097
RPR -- -- 0.45 0.1769 0.1504 0.45 0.1769 0.1504 0.147 0.1676 0.1411
CRP ( EPx103) -- -- 0.00 409.65 449.42 0.00 409.65 449.42 454.5 423.6 463.35

Mohamed T. Mouwafi, Ragab A. El-Sehiemy, Adel A. Abou El-Ela and Abdel-Mohsen M. Kinawy
30 Emirates Journal for Engineering Research, Vol. 19, No.3, 2014
Table 6. Proposed procedures for generation outage at bus 5
Variables Min.
Limit
Max.
Limit
Pre-emergency Post-emergency condition
Initial Case (1) Case (2-b) Case (8) Case (9) Case (10) Case (11) Case (12) Case (13)
Vg 1 1.00 1.10 1.050 1.0120 1.0623 1.050 1.0120 1.0623 1.0751 1.0583 1.0827
Vg 2 0.95 1.05 1.034 1.0217 1.0315 1.034 1.0217 1.0185 1.0227 1.0172 1.0155
Vg 5 0.95 1.05 1.006 1.0137 1.0317 1.006 1.0137 1.0317 1.0216 1.0243 1.0227
Vg 8 0.95 1.05 1.023 1.0148 1.0267 1.023 1.0148 1.0267 1.0287 1.0291 1.0243
Vg 11 1.00 1.10 1.091 1.0430 1.0784 1.091 1.0430 1.0784 1.0672 1.0524 1.0812
Vg 13 1.00 1.10 1.099 1.0380 1.0516 1.099 1.0380 1.0516 1.0528 1.0413 1.0681
Qsw 10 0.00 0.20 0.000 0.1023 0.1547 0.000 0.1023 0.1547 0.1089 0.1513 0.1794
Qsw 17 0.00 0.15 0.000 0.0886 0.1426 0.000 0.0886 0.1426 0.1372 0.1426 0.1397
Qsw 24 0.00 0.10 0.000 0.0822 0.0023 0.000 0.0822 0.0023 0.0814 0.0486 0.0472
QG 1 -0.30 1.00 -0.026 -0.230 0.3821 0.2715 -0.3268* 0.5093 0.7554 0.6962 0.6281
QG 2 -0.40 0.50 -0.103 -0.187 -0.3311 -0.1371 0.4363 -0.3911 -0.3391 -0.3491 -0.3295
QG 5 -0.20 0.60 0.036 0.511 0.2921 --- -- --- --- --- ---
QG 8 -0.20 0.70 0.048 0.185 0.1458 0.3381 0.5221 0.4636 0.5917 0.5527 0.4803
QG 11 -0.06 0.34 0.308 0.236 0.3294 0.2859 0.2612 0.2704 0.3394 0.3352 0.3291
QG 13 0.06 0.37 0.379* 0.335 0.3684 0.4127* 0.2475 0.2368 0.3700 0.3593 0.3572
P.L. (pu.) -- -- 0.17528 0.1631 0.1728 0.17658 0.17873 0.17912 0.17552 0.16977 0.17935
CPL (EP) -- -- 1227 1141.7 1209.6 1236.1 1251.1 1253.8 1228.6 1188.4 1255.5
(V.D.)rms -- -- 0.0182 0.0135 0.0138 0.0222 0.0301 0.0208 0.0180 0.0138 0.0094
RPR -- -- 0.45 0.1769 0.1504 0.45 0.1769 0.1504 0.1225 0.1075 0.0837
CRP ( EPx103) -- -- 0.00 409.65 449.42 0.00 409.65 449.42 491.25 513.75 549.45
9. CONCLUSION
This paper presents optimal control actions using ant
colony optimization (ACO) algorithm to mitigate the
occurrence of voltage collapse in stressed power
systems. The optimal control actions from the load
voltages and generation reactive power based on
each generation voltage, each switchable reactive
power and a combination of them are prepared at
normal conditions using multi objective functions
under control, dependent and voltage collapse
constraints. This procedure helps the system
operators to choose easily the optimal feasible
solution of the preventive control action operating
condition. The preventive actions are tested under
different emergency conditions. Also, this paper
proposes an efficient procedure to obtain the optimal
preventive control actions using the ACO technique
to overcome the emergency effects in power
systems. The power system operator can ramp the
load voltages and generation reactive power based
on each generation voltage, each switchable reactive
power and a combination of them corresponding to
the amount of the preventive control actions
requirements. The proposed procedures are suitable
routines that help the decision-maker to give the best
decision for removing emergency effects with
minimum incremental transmission losses, minimum
voltage deviation and switchable devices costs.
REFERENCES
1. Alexandra, M. 2006. Electric Power Systems: A
Conceptual Introduction. Wiley Survival Guides
in Engineering and Science, Wiley-IEEE Press.
2. Kępka, J. 2010. Power Factor Correction-Design
of automatic capacitor bank. Wroclaw University
of Technology, Poland.
3. Hao, S. 2003. A reactive power management
proposal for transmission operators. IEEE Trans.
Power Systems, Vol. 18(4):1374-1381.
4. Feng, Z., Ajjarapu, V. and Maratukulam, D. J.
2000. A Comprehensive Approach for Preventive
and Corrective Control to Mitigate Voltage
Collapse. IEEE Trans. on Power Systems, 15(2):
791-797.
5. Capitanescu and Van Cutsem, T. 2005. Unified
Sensitivity Analysis of Unstable or Low Voltages
Caused by Load Increases or Contingencies.
IEEE Trans. on Power Systems, 20(1):321-329.
6. Capitanescu, F., Van Cutsem, T. and Wehenkel,
L. 2009. Coupling Optimization and Dynamic
Simulation for Preventive-Corrective Control of
Voltage Instability. IEEE Trans. on Power
Systems, 24(2):796-805.
7. Lenoir, L., Kamwa, I. and Dessaint, L. A. 2009.
Overload Alleviation With Preventive-Corrective
Static Security Using Fuzzy Logic. IEEE Trans.
on Power Systems, 24(1):134-145.
8. Fu, X. and Wang, X. 2007. Unified Preventive
Control Approach Considering Voltage
Instability and Thermal Overload. IET Gener.
Transm. Distrib, 1(6): 864-871.
9. Bruno, S. and Scala, M. L. 2004. Unified Power
Flow Controllers for Security-Constrained
Transmission Management. IEEE Trans. on
Power Systems, 19(1):418-426.
10. Li, F., Pilgrim, J. D., Dabeedin, C., Chebbo, A.
and Aggarwal, R. K. 2005. Genetic Algorithms

A Complete Reactive Power Management Strategy Using Ant Colony Optimization Algorithm
Emirates Journal for Engineering Research, Vol. 19, No.3, 2014 31
for Optimal Reactive Power Compensation on
the National Grid System. IEEE Trans. on Power
Systems, 20(1):493-500.
11. Dorigo, M. 1992. Optimization, Learning and
Natural Algorithms", Ph. D. dissertation, Dept.
Electron. Politecnico di Milano, Milan, Italy.
12. In-Keun, Y. U., Chou, C. S. and Song, Y. H.
1998. Application of the ant colony search
algorithm to short-term generation scheduling
problem of thermal units. Proceedings of the
International Conference on Power System
Technology, 1:552-556.
13. Ketabil, A. and Feuillet, R. 2010. Ant Colony
Search Algorithm for Optimal Generators Startup
during Power System Restoration. Mathematical
Problems in Engineering, Volume 2010, Article
ID 906935.
14. El-Sharkh, M. Y., Sisworahardjo, N. S., Rahman,
A. and Alam, M. S. 2006. An improved ant
colony search algorithm for unit commitment
application. Proceedings of IEEE Power Systems
Conference and Exposition, pp. 1741-1746.
15. Hou, Y. H., Wu, Y. W., Lu, L. J. and Xiong, X.
Y. 2002. Generalized ant colony optimization for
economic dispatch of power systems.
Proceedings of IEEE International Conference on
Power System Technology, 1:225-229.
16. Vlachogiannis, J. G., Hatziargyriou, N. D. and
Lee, K. Y. 2005. Ant colony system-based
algorithm for constrained load flow problem.
IEEE Transactions on Power Systems, 20(3):
1241-1249.
17. Lingfeng, W. 2006. Reliability-Constrained
Optimum Recloser Placement in Distributed
Generation Using Ant Colony System Algorithm.
Proceedings of Power Systems Conference
and Exposition (PSCE '06), pp. 1860-1865.
18. Chandragupta, K. S., Thanushkodi, K.,
Sasikumar, K. and Aanandvelu, M. 2012.
Optimization of Reactive Power Based on
Improved Particle Swarm Algorithm. European
Journal of Scientific Research, 72(4):608-617.
19. Zhu, Y. P., Cai, Z. X., Zhang, Y. J., Song, Y. C.
and Yang, Y. G. 2011. Reactive Power
Optimization Based on Improved Particle Swarm
Optimization Algorithm Considering Voltage
Quality. Advanced Materials Research, pp. 4721-
4726.
20. Niknam, T. 2008. A new approach based on ant
colony optimization for daily Volt/Var control in
distribution networks considering distributed
generators. Energy Conversion and Management,
49:3417-3424.
21. Huang, M. 2010. Improved ant colony algorithm
in the distribution of reactive power
compensation device and optimization. Procedia
Engineering, 7:256-264.
22. Chang, C. 2008. Reconfiguration and Capacitor
Placement for Loss Reduction of Distribution
Systems by Ant Colony Search Algorithm. IEEE
Trans. Power Syst., 23(4):1747-1755.
23. Abou El-Ela, A. A., Kinawy, A. M., El-Sehiemy,
R. A. and Mouwafi, M. T. 2011. Optimal
reactive power dispatch using ant colony
optimization algorithm. Electrical
Engineering Journal, Springer, 93(2):103-116.
24. Abou El-Ela, A. A., Bishr, M., Allam, S. and El-
Sehiemy, R. A. 2005. Optimal Preventive
Control Actions using Multi-objective Fuzzy
Linear Programming Technique. Electric Power
Systems Research, 74:147-155.
25. Washington University Website:
www.ee.washington.edu/research/pstca/