Embed Size (px)
Citation preview

This article was downloaded by: [RMIT University]On: 21 February 2013, At: 11:31Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH,UK
Polymer-Plastics Technologyand EngineeringPublication details, including instructions forauthors and subscription information:http://www.tandfonline.com/loi/lpte20
A Dynamic Injection-MoldingProcess Model for SimulatingMold Cavity Pressure PatternsSuzanne L. B. Woll a & Douglas J. Cooper aa Chemical Engineering Department, University ofConnecticut, U-222 Storrs, Connecticut, 06269-3222Version of record first published: 20 Aug 2006.
To cite this article: Suzanne L. B. Woll & Douglas J. Cooper (1997): A DynamicInjection-Molding Process Model for Simulating Mold Cavity Pressure Patterns,Polymer-Plastics Technology and Engineering, 36:5, 809-840
To link to this article: http://dx.doi.org/10.1080/03602559708000662
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.tandfonline.com/page/terms-and-conditions
This article may be used for research, teaching, and private study purposes.Any substantial or systematic reproduction, redistribution, reselling, loan,sub-licensing, systematic supply, or distribution in any form to anyone isexpressly forbidden.
The publisher does not give any warranty express or implied or make anyrepresentation that the contents will be complete or accurate or up todate. The accuracy of any instructions, formulae, and drug doses should beindependently verified with primary sources. The publisher shall not be liablefor any loss, actions, claims, proceedings, demand, or costs or damages

whatsoever or howsoever caused arising directly or indirectly in connectionwith or arising out of the use of this material.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

P0LYM.-PLAST. TECHNOL. ENG., 36(5), 809-840 (1997)
A DYNAMIC INJECTION-MOLDING PROCESS MODEL FOR SIMULATING MOLD CAVITY PRESSURE PATTERNS
SUZANNE L. B. WOLL and DOUGLAS J . COOPER*
Chemical Engineering Departmenl University of Connecticut, U-222 Storrs, Connecticut 06269-3222
Abstract
The quality of injection-molded parts is typically controlled in the plant using statistical techniques that involve measuring parts as well as monitoring processing parameters. Part quality is also con- trolled by machine operators who adjust processing conditions in response to trends in process behavior. To achieve direct on-line monitoring and automatic control of part quality, a multivariable, nonlinear process model must be developed that relates process behavior to machine-controllable parameters. Presented in this work are the details of such a model derived from first principles and proven correlations. Because recent work has shown that complete mold cavity pressure patterns are good indicators of part quality, the focus of this lumped-parameter model is to simu- late mold cavity pressure patterns observed during the filling, packing, and cooling stages of the process, given machine set points for barrel temperature and holding pressure. The model
* To whom correspondence should be sent.
809
Copyright 0 1997 by Marcel Dekker, Inc.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

81 0 WOLL AND COOPER
is validated experimentally using a production injection-molding machine and parameter-sensitivity case studies are presented.
Key Words: Injection molding; Process model; Cavity pressure; Process control; Pattern Based.
INTRODUCTION
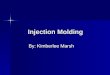
Injection molding is a multibillion dollar industry that is fundamental to a wide range of high-technology and consumer products. In this high- volume, low-cost manufacturing process, molten plastic is injected into a chilled mold under high pressure. A schematic of an injection-molding machine is shown in Figure 1. After the mold is filled, a holding pressure is applied to pack the mold as the melt cools and solidifies in the mold. When the part or parts are sufficiently cool, the mold opens and they are ejected. This cycle, which ranges from less than a minute to several minutes depending on the size of the parts, then repeats.
Difficulties in producing precision injection-molded parts arise be- cause slight variations in processing conditions can cause significant changes in part quality. The injection-molding process is multivariable
Feed
Hydraulic Barrel Nozzle Mold System
FIG. 1. Schematic of instrumented injection-molding machine.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 81 1
and nonlinear and, as such, presents a complex monitoring and control problem. Previous work on injection-molding process control has fo- cused on machine control of pressure [l-31, melt temperature [4,5], and ram velocity [6,7]. However, because material variations can affect part quality without significantly upsetting machine performance, ma- chine control alone is insufficient to consistently produce high-quality parts.
In a review of injection-molding process control strategies, Agrawal et al. [8] recommend that polymer variables be used for control pur- poses. Peak cavity pressure is one polymer variable long known to be directly related to part quality [9-12]. More recent evidence, however, suggests that complete cavity pressure sensor patterns contain signifi- cantly more information about part quality than do single peak values [ 13-1 51.
The process model described herein generates complete mold cavity pressure sensor patterns, given machine and material parameters. It builds on the one-dimensional frameworks of Shankar and Paul [I61 and Chiu et al. [17]. The model is derived from first principles and proven correlations. It relates the dynamic interaction of manipulated variables such as barrel temperature and holding pressure to measured process variables such as the mold cavity pressure pattern. The filling, packing, and cooling stages involved in the molding of a rectangular ASTM flame bar are modeled. The resulting model, a system of nonlin- ear ordinary differential and algebraic equations, is solved simultane- ously using a Bulirsch-Stoer numerical technique.
Previous Work
Early pioneers in the development of injection-molding process models include Spencer and Gilmore [18] who first investigated the filling stage and McKelvey [19] and Pearson 1201 who first described the process using the fundamental transport equations. The numerical solution of these transport equations was achieved soon after by Harry and Parrott [21] and Kamal and Kenig [22,23].
Molding simulations have since been expanded to include irregular geometries, crystallization kinetics, and viscoelastic effects [24-341. Two- and three-dimensional complex phenomena such as fountain flow, part morphology, and shrinkage and warpage can now be pre- dicted throughout the filling, packing, and cooling stages.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

81 2 WOLL AND COOPER
These fundamental models focus on the polymer melt rather than the machine. They are useful for part and mold design but are too complex and expensive to use for on-line process monitoring and con- trol. As a result, researchers in process control have generally relied on empirical machine models for machine control [l-71. In more recent attempts to include the interaction between the polymer and the ma- chine, heuristic process models for part quality monitoring and control have been developed [35-391.
In contrast to the models previously discussed, Shankar and Paul [16] developed a fundamental process model that included the dynamics of the machine and the polymer. They recognized that a generalized machine/polymer model could effectively be used off-line for control system design as well as machine component selection. Their one-di- mensional mathematical model is based on first-order valve dynamics, Newton’s Second Law, the transport equations, a Spencer-Gilmore equation of state, and the equation of energy. The streamlined lumped- parameter model consists of ordinary differential equations and related algebraic equations and assumes that flow through channels can be found using equivalent resistances, a concept upheld by Booy [40]. Despite some experimental difficulties, demonstrations show that gen- eral pressure pattern features can be predicted €or the filling, packing, and cooling stages.
Chiu et al. [ 171 developed a dynamic machine/polymer model similar to that of Shankar and Paul [16]. Their goal was to investigate the relationship between melt flow rate and cavity pressure as a first step in designing an on-line part quality controller. The major differences between the work of Chiu et al. and Shankar and Paul are that Chiu et al. did not assume steady-state flow in the momentum equation and that they restricted themselves to the filling stage. Further work by Wei et al. [41] extended the model to include the nonlinear dynamics of a servo-pump system. Experimental validation by both Chiu et al. and Wei et al. show good agreement with their models.
The model described in this work builds on the ideas of both Shankar and Paul [16] and Chiu et al. [17]. Similar to the work of Shankar and Paul, this model considers the filling, packing, and cooling stages and, similar to the work of Chiu et al., the purpose of this model is to design a part quality controller based on cavity pressure. The novel features of this lumped-parameter model are that the packing and cooling stages are considered to occur concurrently, the compressibility of the poly-
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIM U LATl NG MOLD CAVITY PR ESSU RE PATTERNS 81 3
mer is a function of temperature and pressure, and the cooling equations account for the heat of crystallization generated by semicrystalline polymers. In addition, this model includes a Tait equation of state, a Cross viscosity model, and first-order ram velocity dynamics. This process model generates cavity pressure sensor patterns as a function of machine-controllable variables such as barrel temperature and hold pressure. The process model described herein was designed to be sim- ple enough to use in real-time monitoring and control applications at the plant level, yet detailed enough to correctly predict process trends.
PROCESS MODEL
The fundamental equations employed in the process model include Newton’s Second Law as well as the equations of continuity, momen- tum, and energy. This model relates the dynamic interactions of the manipulated variables, including barrel temperature and holding pres- sure, to the measured process variables such as the mold cavity pres- sure profile. The model assumes the following:
The ram velocity can be modeled with first-order dynamics. The polymer is compressible in the continuity equation but in- compressible in the momentum equation. Flow in the conduit is laminar and unidirectional. The filling stage occurs isothermally. During the packing stage, the conduit can be divided into five geometrical sections. The viscosity of the polymer can be represented by the Cross model. The PVT behavior of the polymer can be represented by the Tait equation. The pressure drop between the barrel and the nozzle is negligible. The mold wall temperature remains constant. During cooling, the bulk polymer temperature is found from a non-steady-state heat conduction model. The heat capacity is a function of temperature.
The resulting system of equations is solved for the hydraulic pressure, nozzle pressure, ram velocity, polymer flow, and cavity pressure pat- terns.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

81 4 WOLL AND COOPER
Movement of the Screw
During injection, the velocity of the ram is controlled by regulating the influx of hydraulic oil to the chamber behind the ram. Although specific knowledge about a machine’s hydraulic system may be proprietary and/ or unavailable, the ram velocity set points are generally known and ram velocity can be measured directly. Experiments show that it is reasonable to describe the ram velocity, v , with first-order dynamics:
dv r l - + u = Klvf dt
The ram velocity trajectory is assumed to consist of three stages. Thus, the ram velocity set point, v f , is defined as
where x is the position of the ram at any point in time. K , and T~ are the ram velocity process gain and time constant, respectively. Figure 2 compares the ram velocity model with actual baseline data. Although the first-order model does not provide an exact fit to the data, the model provides a good first approximation.
During injection, when the ram velocity is given by Eq. ( I ) , the hydraulic pressure, P h y d , is found by rearranging Newton’s Second Law,
The force applied to the ram is the hydraulic force and the forces that resist movement of the ram are a friction force and a viscous damping force. P h y d and Pbrl are the hydraulic and barrel pressures, respectively. Similarly, Ahyd is the cross-sectional area of the hydraulic cylinder and Abrl is the cross-sectional area of the barrel. M is the mass of the actua- tor assembly. The coefficients Cfand Bfcan be determined from closed
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SI M U LATl NG MOLD CAVITY PR ESSU RE PATTERNS 81 5
I I I I
0 5 10 15 2o
RAM POSITION (mm) FIG. 2. Ram velocity model.
nozzle and injection-to-air experiments following the procedure de- scribed by Chiu et al. [I7].
During packing, machine control switches from velocity control to pressure control. Machine switchover occurs when the ram position exceeds a given set point, x3. A value of 20.3 cm was chosen for x3 rather than the actual machine value of 19.6 cm in order to more accu- rately reflect the observed cavity pressure data. The 2.6% difference in shot volume accounts for errors in calculating conduit volume, check ring leakage, use of ideal thermodynamic data to model nonideal dy- namic polymer compressibility, and the formation of a polymer skin on the surface of the conduit during injection.
In the packing regime, the hydraulic pressure is quickly transitioned to the specified holding pressure, Phold, using first-order dynamics:
and Newton's Second Law is then used directly to describe the deceler- ation of the screw. The time constant, T ~ , was determined from a simple experiment in which the holding pressure set point was changed mid- way through the packing stage. K 2 , the process gain, equals one.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

81 6 WOLL AND COOPER
Filling
Polymer flows due to the physical displacement by the screw as well as an increase in polymer pressure. The relationship between polymer pressure, P,,, screw position, x , and polymer flow, Q l , can be found by applying the continuity equation for a compressible fluid to the vol- ume of polymer in the barrel, Vbrl:
The pressure drop along the barrel is assumed to be negligible and the nozzle pressure upstream of the nozzle orifice is assumed to equal the barrel pressure. The volume of polymer remaining is dependent on the position of the ram and the initial volume of polymer in the barrel, Vbrl, 0:
and the bulk modulus of the polymer, K,, is defined as
The polymer density, p, is found using the Tait equation of state [42, 431 :
The expressions for uO and BT are given as
and
BT = b3 exp( - b4T)
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 81 7
where T = T - Tf. The parameters b1,... ,4 are specific to the material used and C is the universal Tait parameter equal to 0.0894. The transi- tion temperature, TI, refers to either the crystallization or glass transi- tion temperature depending on whether the polymer is semicrystalline or amorphous. Because it is well known that fast cooling rates depress transition temperatures, the equilibrium transition temperature was re- placed in this model with a lower, dynamic transition temperature as determined by a differential scanning calorimetry (DSC) experiment. The adjustment to the Tait model represents a reasonable attempt to compensate for the inconsistency of using equilibrium equations to de- scribe a dynamic system.
By differentiating the Tait equation of state, assuming constant tem- perature, the bulk modulus can be expressed as
K p = pnoz C + l l r j l - c lo+ + a]) To calculate the flow of polymer from the nozr.,: into the mold cav-
ity, the equations of motion must be solved. Assuming laminar flow of an incompressible fluid in a cylindrical conduit, the relevant momentum equation is
where P is the polymer pressure, r is the conduit radius, 7 , is the shear stress acting in the radial direction perpendicular to the axial direction, z , p is the polymer density, and v, is the velocity of flow in the axial direction.
By applying this equation to the polymer in the conduit sections of the nozzle orifice, sprue, runner system, gate, and mold cavity ( i = 1 ,. . , , 5 ) , the polymer flow in the conduit during filling, Q , , is described by
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

81 8 WOLL AND COOPER
The pressure at the flow front during filling, Pflow is assumed to be atmospheric, and the average polymer density, pavg, is found by evaluating the Tait equation of state at the melt temperature, TO, and the mean nozzle pressure, P,,,/2.
The resistive shear force in the ith section, Fs , i , is the shear stress present in the ith section, T ~ ~ , ; , multiplied by the surface area of the ith section, As,i,
where
The polymer viscosity, qi, is evaluated from the Cross equation 1441
The zero shear rate viscosity, Yo.;, is determined as a function of tem- perature, Ti, and pressure, Pi,
where Tb and p are rheological constants. The power index is repre- sented by n.
The shear rate, +;, is calculated simply as
where Qi is the flow rate and Dh,; is the hydraulic diameter of the ith section. The parameter, T * , is the shear stress evaluated at the zero shear rate viscosity, q0,;, and the critical shear rate, qc:
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 81 9
The critical shear rate, yc, is defined as the shear rate at the intersection of purely Newtonian and power-law fluid behaviors on the viscosity versus shear rate graph.
To evaluate the summations in Eq. (9), it is necessary to know the axial position of the polymer flow front within the conduit. By integrat- ing the flow of polymer from the nozzle over time, the total volume of polymer, Vtot, present in the conduit can be determined as
Then, given the geometries of the individual sections, the position of the flow front and the fractional hydraulic length of the leading section can be found. When the polymer flow front is at or beyond the point where the cavity pressure transducer is located, the cavity pressure, Ps , is calculated from the Hagen-Poiselle equation for the flow of non- Newtonian polymers between flat plates as
where w is the cavity width and h is the cavity height. The hydraulic flow length, H L , c , corresponds to the polymer flow length between the center of cavity pressure transducer pin and flow front.
Switchover from filling to packing with regard to the polymer occurs when the total volume of polymer injected into the conduit equals the total volume of the mold cavity and the runner system, that is,
Packing
At this point in the simulation, it can no longer be assumed that the polymer in the conduit is incompressible in the momentum equation and the continuity and momentum equations must be applied to each section of the conduit. Thus, the polymer density for the ith section, pi, is calculated as
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

820 WOLL AND COOPER
and the polymer flow for the ith segment, Q;, is calculated as
where Pi is the pressure within a given section as determined from the Tait equation. For the case i = I , Po is the nozzle pressure and po is the density of the polymer in the nozzle. For the case i=5 , Q6 refers to the flow of polymer out the opposite end of mold and is equal to zero.
While solving the model at each step, the temperature of each sec- tion, Ti , is determined from the cooling equations as discussed below. An average polymer temperature between two sections of conduit, Tmid,;, is calculated and then used within the corresponding i and i- I sections to determine the appropriate polymer viscosities and resistive shear forces. Given the pressure, P , , from the previous step, the flow into the ith section, Qi, and the density of the previous section, pi- I ,
are determined from the simultaneous solution of Eqs. (22) and (23) from the midpoint of one section to the midpoint of the next over all five sections. The density of the mold, ps, is simply a function of the flow into the mold, Q5, and the density of the polymer at the gate, p4. Following this procedure, the pressures of each section are updated using the Tait equation.
Cooling
During filling, the heat generated by viscous dissipation is assumed to be offset by the heat lost due to conduction and, therefore, the melt temperature is assumed to be constant. Once the mold is filled, how- ever, cooling of the polymer melt is significant and the temperature of the polymer in the conduit is determined by solving the equation of energy for non-steady-state heat conduction. Assuming that heat loss occurs perpendicular to the polymer-mold interface and that shear heating is negligible, the cooling rate for each section of conduit can be found as
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SI MU LATl NG MOLD CAVITY PRESSURE PATTERNS 821
where the overall heat transfer coefficient, Uo,i , is defined as
For the gate section (i = 4), the heat transfer coefficient applied in the model is assumed to be half the value calculated to account for end effects in this region.
Rather than include a specific heat generation term to account for crystallization, a variable heat capacity, Cp, i , is used. The following functional form predicts a broad peak in heat capacity during solidifica- tion for semicrystalline polymers [31]:
where Ti = Ti - c5. The coefficients are found by fitting the upper and lower halves of a DSC curve. In particular, the coefficient, c5, is the temperature corresponding to the crystalline peak observed in the DSC scan.
The cooling portion of the DSC experiment was conducted at a rate of 5 K/min. Although this rate is approximately one to two decades slower than the cooling rates observed in injection molding, the DSC experiment provides a good first approximation of the heat capacity and crystallization behavior for the system modeled in this work.
Using the DSC experiment heat capacity information to conduct an entropy balance, it is assumed that the fraction of polymer that is solid at any given temperature, &,;, can be approximated by
The upper perturbation temperature, T,,, , corresponding to 100% mol-
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

822 WOLL AND COOPER
ten polymer is defined as 10 K, and the lower perturbation temperature, Ts, corresponding to 100% solid polymer is defined as the temperature at which
As a result of solidification, the polymer flow is restricted and the following relations hold for calculating the hydraulic diameter, the cross-sectional area, and the surface area of each section:
where DHo,i is the initial hydraulic diameter before solidification. The partial pressure contribution due to the solid fraction was assumed to be negligible as compared to that of the liquid, allowing the total pressure observed in a given section of conduit to be set equal to the partial pressure of the liquid phase as calculated by the Tait equation:
When the cross-sectional area in the gate falls to zero, the flow of polymer into the mold ceases. At this point, the gate is said to be frozen and the packing is complete. From this point on, a constant polymer density in the mold cavity is assumed. Cooling continues until the mold is opened.
Model Summary
The dynamic equations in this model can be used to compute mold cavity pressure patterns. The equations describe the velocity and pres- sure control stages of the machine as well as the filling, packing, and cooling stages of the polymer. Ancillary equations are used to describe mold geometry, polymer viscosity, and polymer state changes. The machine parameters, polymer property data, and conduit geometrical
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SI M U LATl NG MOLD CAVITY PRESSURE PATTERNS 823
TABLE 1 Injection-Molding Machine Parameters
Parameter Value ~~
Unit
11,340 1,134
400 1,000
250 1 0.34
200 2.88, 3.6, or 4.32
322 508, 514, or 519
146,400 20 40
5 3.8
15.2 20.3 0.025 0.072 0.025
mm2 mm2 N drnm N W/mZ K
W/mK kg MPa K K mm3 % % % cm cm cm
-
S
S
S
data used in this model are given in Tables 1, 2, and 3, respectively. Numerical solution of this stiff system of equations is found using a variable-step-size, semiexplicit Bulirsch-Stoer method [45].
The system of equations is integrated from the start of injection until the cooling is complete. At machine switchover, the model switches the driving force of the process from velocity to pressure dynamics. Similarly, following polymer switchover, the model switches from using the continuity and momentum equations for filling the mold to the continuity, momentum, and energy equations for packing and cool- ing the mold. In this manner, the process model is solved and mold cavity pressure patterns are computed.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

824 WOLL AND COOPER
TABLE 2 Polymer Property Data
Parameter Value Unit
8.6 x 1 O - I o
9.0 x 10-4 6.3 x 10-7
1.6 x 1 0 - 3
1.0 x 108
0.0894 2,000 2,300
-1 5
6,500 6,200
0.075 0.050
463 14,380
468 6.3 x 105
Pa.s m3/kg m3/kg K Pa K - ’
Jig K Jlg K Jlg K’ Jlg K2 Jlg K Jlg K K-2
K - 2
K K K Pa
-
TABLE 3 Conduit Data
Orifice Sprue Runner Gate Mold Transducer Unit ~ ~~
1 =
Geometry
~
0 or I Cylindrical
25.3 143
5.67 8.0
202
-
2 3 4 Conical Trapezoidal Irregular
43.5 30.2 5.6 2066 4324 34
5.43 6.35 2.67 85.8 194.6 4 .O
4067 5085 17
~ ~~~
5 Rectangular
40.4 4034
5.09 127.0
3.2 12.7
5129
Circular mm2 mmz
6.35 mm 9.53 mm
mm3 mm mm
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 825
EXPERIMENTAL PROCEDURE
Pelletized, unreinforced polybutylene terephthlate (PBT) was molded into ASTM flame bars using a 90-ton Toyo Plastar injection-molding machine. The machine was programmed to inject plastic melt into the mold under velocity control and then to “pack out” the mold under pressure control. Switchover from velocity to pressure control oc- curred when the ram position reached the designated stroke value. The machine-mold assembly was instrumented with hydraulic, nozzle, and cavity pressure sensors as shown in Figure 1. High-speed data were collected from two separate step test experiments to validate the pres- sure pattern simulations of the model.
Material
The PBT selected for these experiments, GE Valox 325, is a semicrys- talline material with a melt temperature of 235°C (455°F) and a specific gravity of 1 . 3 1. Valox is characterized by comparatively high chemical and thermal resistance properties and is used extensively in the plastics industry for automotive electrical applications. This material was se- lected for its industrial significance as well as its semicrystalline be- havior.
Equipment
A MoldMaster ASTM mold was configured to produce an ASTM flame bar (D 635) approximately 127 mm long, 12.7 mm wide, and 3.8 mm thick. A Dynisco FT44DH 250-kg (550-lb) cavity pressure transducer was inserted behind a 6.35-mm- (%-in.) diameter ejector pin as shown in Figure 3. The mold was then installed in a Toyo Ti90G2 injection- molding machine and connected to a ConAir TCI-DI thermolator to maintain the mold coolant water temperature at 49°C (120°F).
The machine-mold assembly was also instrumented with a Kyowa PAV-200KEM33 hydraulic pressure transducer, a Dynisco PT465XL 210-MPa (30,000-psig) nozzle pressure transducer and a Lucas-Shae- vitz magnetorestrictive linear displacement transducer. Data were col- lected and displayed on a Gateway 486 personal computer using a Strawberry Tree high-speed data acquisition system. Prior to process- ing, the Valox material was dried in a ConAir D30H4 dessicant dryer at 121°C (250°F) for at least 4 h.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

826 WOLL AND COOPER
-:: IQ c
SPRUE (Projects from Page)
RUNNER
4’
PART
CAVITY
SENSOR pREssuRE
FIG. 3. Diagram of solid plastic form as ejected from mold.
Procedure
Initial processing conditions were determined from the material manu- facturer’s literature and refined on-line. The baseline processing condi- tions were defined as a barrel temperature of 241°C (465°F) and a hold- ing pressure of 3.55 MPa (500 psig). Note that a barrel temperature set point of 241°C (465°F) refers to a descending series of barrel heater band set points, 241-238-235-232°C (465-460-455-450°F). for which the nozzle temperature set point is 241°C. The cycle time to produce a flame bar was approximately 1 min.
Two step test experiments were run in which the barrel temperature and holding pressure were varied. At the onset of each experiment, the machine was operated at baseline conditions for at least 1 h before data were collected to allow for machine equilibration. During each experiment, the set point of interest was stepped up, then stepped back down to baseline conditions, then stepped down further, and then fi- nally stepped back up to baseline conditions. The barrel temperature set point values of interest were 246, 241, and 235°C (475, 465, and 455°F) and holding pressure set point values of interest were 4.24,3.55, and 2.86 MPa (600, 500, and 400 psig).
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SI M U LATl NG MOLD CAVITY PRESS U RE PATTERNS 827
Pressure sensor data were collected at a rate of 25 Hz over a period of 13 s beginning from the start of injection for a given shot. Due to differences observed in the process response, approximately 20 injec- tion cycles worth of data were recorded for each holding pressure step change, whereas 90 injection cycles worth of data were recorded for each barrel temperature step change.
For convenience, the number of data points per injection cycle was reduced from 325 to 36. Every other data point corresponding to an injection time of less than 1.5 s and every fifteenth data point thereafter was retained. The resulting patterns were “front-loaded’’ in this man- ner to ensure that the injection peak would be properly captured. The cavity pressure data patterns were also adjusted vertically to account for sensor calibration drift and horizontally to eliminate lag variability introduced from the hydraulic actuation system. Of the data recorded, data from 10 injection cycles per operating condition were averaged to obtain the data patterns plotted in Figures 4-5 and 7-9.
RESULTS AND DISCUSSION
The process model describes the time-dependent behavior of the injec- tion-molding process from the hydraulic system to the mold cavity. Validation of this process model is based on the ability of the model to reasonably reproduce the pressure patterns observed in the step test experiments.
Validation of Baseline Model
Data patterns collected under a baseline processing condition are first used to validate the model. The ability of the model to track experimen- tal process changes from this baseline condition then completes the validation.
Figure 4 compares baseline hydraulic pressure patterns. During in- jection, the model follows the rise in pressure closely but deviates somewhat in the peak region. Once machine switchover occurs, the model again closely tracks the data. The discrepancy in the peak region of the hydraulic pressure patterns is most likely due to mismatch be- tween the actual ram velocity dynamics and the first-order model imple- mented in the simulation.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

828
241 "C 3.55 MPa O Data -Model
1
WOLL AND COOPER
Lrl c4 h
d * n z TIME (s)
FIG. 4. Baseline hydraulic pressure response
Figure 5 compares baseline nozzle pressure patterns. Once again, the model shows good agreement with the data, although there is some discrepancy in the peak region. Note that the magnitude of the model pressure pattern closely approximates the data. This evidence validates the model assumption that the pressure drop between the nozzle and the barrel is negligible.
Figure 6 shows the simulated melt flow rate of polymer as it flows from the nozzle. The rise in flow corresponds to an increase in ram velocity as the melt flows through the orifice and into the sprue. Then, the flow rate decreases sharply as the melt enters the runner system from the sprue. By the time the melt reaches the gate, the flow rate drops once more as a result of a substantial decrease in injection speed as well as the presence of a significant flow restriction. The final drop in flow rate occurs following machine switchover when the hydraulic pressure drops significantly and flow reverses direction momentarily. During the packing and cooling stages, the melt flow rate initially rises slightly above zero and then gradually decreases with time.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SI M U LATl NG MOLD CAVITY PRESSU RE PATTERNS 829
n g 120
c - 100 w p! 80 3 rn c/1 60 w
40
1 241 "C 3.55 MPa
0 0.5 1 1.5 2 2.5 3 3.5 4
TIME (s) FIG. 5. Baseline nozzle pressure response.
w t-. 20 4
241 o c 3.55 MPa i 6 0 r 40 C
I - , - .
I '
I '
I '
1 ' - - Ram Velocity .' -Melt Flow Rats
0 0.5 1 1.5 2 2.5 3
TIME (s) FIG. 6. Simulated melt flow rate at baseline conditions.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

a30 WOLL AND COOPER
Figure 7 demonstrates the overall correlation between the cavity pressure patterns of the process and those of the model. As expected due to the ram velocity model mismatch discussed earlier, there is some discrepancy between the simulation and the data in the filling region. However, the model is successful in accurately predicting the peak pressure as well as the lag time associated with the progression of the flow front to the transducer. The peak observed in the data is sharper than the one obtained from the simulation. Shrinkage due to the forma- tion of a polymer skin at the melt-mold interface could cause the pres- sure observed at the ejector pin to be less than that predicted by the model.
A convective heat transfer coefficient, h,, of 250 W/m2 K was used to fit the pressure decay data during packing. Although different from that used by some researchers, the value is of the order of that calcu- lated from the thermal contact resistance work of Yu et al. [46]. As packing continues, the gate slowly freezes and the slope of the cavity pressure pattern becomes slightly more negative. Despite the primitive nature of the packing model, the model is successful in predicting this change in slope for this system. Melt continues to flow into the mold and increase part density but at a decreasing rate.
At about 10 s into the injection cycle, the gate completely freezes and the pressure drops rapidly. As shown in Figure 7, the pressure
O Data -Model
u 0 2 4 6 8 1 0 1 2 1 4
TIME (s) FIG. 7. Baseline cavity pressure response.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 831
decay predicted by the model is not as steep as the observed data, but a substantial change in slope is evident. The primary cause of this decay is part shrinkage. In this region, however, the model assumes constant density and the pressure is a function of the liquid fraction of polymer remaining in the cavity.
Process-Sensitivity Case Studies
Data patterns collected from the step test experiments demonstrate the sensitivity of the process to changes in barrel temperature and holding
60
50
40
30 h cd 5 20
3 W
3 0 ,A
U J v.) 0 2 4 6 8 1 0 1 2 1 4
235 "C 3.55 MPa O Data -Model
d u 30
20
10
0 0 2 4 6 8 1 0 1 2 1 4
TIME (s) FIG. 8. Temperature sensitivity of cavity pressure response.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

832 WOLL AND COOPER
pressure. These data patterns also validate the trending capabilities of the model.
Figure 8 compares cavity pressure data patterns obtained for barrel temperature set points of 235°C and 246°C (455°F and 475°F). Note that at the higher temperature, the injection peak is steep, but at the lower temperature, the injection peak is absent. The simulation predicts this behavior quite well. Using the model, an explanation for this phenome- non can be found.
As shown by the Cross viscosity model [Eq. (15)] melt viscosity increases as temperature decreases. Under ram velocity control, the
60
so
40
30 A
i2 20 8 3 lo 3 0 2
241 "C 4.24MPa O Data -Model
0 2 4 6 8 1 0 1 2 1 4
I 241 "C 2.86 MPa O Data -Model
0 2 4 6 8 1 0 1 2 1 4
TIME (s) FIG. 9. Packing pressure sensitivity of cavity pressure response.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 833
injection pressure required to maintain ram velocity increases with in- creased melt viscosity. Melt compression increases in the nozzle and the average density of the polymer flowing in the conduit increases. As a result, for a given displacement of the ram, the volume of polymer in the conduit is less for lower melt temperatures. If machine switch- over occurs before the mold fills with polymer, no steep injection peak is observed. Vice versa, if machine switchover occurs a long time after the mold fills, a very steep injection pressure peak is observed. Patterns exhibiting these extreme features are often associated with the produc- tion of short shots or parts with flash.
Figure 9 compares cavity pressure data patterns obtained for holding pressure set points of 2.86 and 4.24 MPa (400 and 600 psig). As ex- pected, higher holding pressure set points result in higher cavity pres- sures during packing. The simulation successfully predicts this trend even though the magnitude of packing pressure plateau lacks accuracy.
CONCLUSIONS
Cavity pressure patterns are used frequently in the injection-molding industry to establish process operating conditions and troubleshoot pro- cessing problems. In our work, we seek to extend the use of cavity pressure patterns to on-line part quality monitoring and control. The process model described in this work quickly and accurately generates the cavity pressure pattern features and trends observed in the filling, packing, and cooling stages of the injection-molding process. Output from this model will be used to generate a pattern map relating cavity pressure patterns to machine-controllable parameters, and this pattern map will be incorporated into an overall part quality control scheme.
At the plant level, part quality control is currently accomplished in two ways. First, statistical techniques are used to monitor part quality and discrete on-line processing parameters. Problems with this method include long lag times and inaccurate predictions resulting from parame- ter interactions and discrete data. The second method relies on experi- enced operators to evaluate process behavior over time and adjust ma- chine set points accordingly. Although the problems of the first method are overcome, a new problem is variability in operator skill.
In our cascade, on-line part quality control strategy shown in Figure 10, we seek to improve upon the current pattern-based technique. Our strategy will evaluate cavity pressure patterns and determine set point
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

834 WOLL AND COOPER
Set Point Set Points Injection Desired Pattern !Hold
' B a m l
Pattern Controller - Set Point Set Points Injection Molding System
Desired Pattern 'Hold TBamI
Pattern Machine + Injection Controller - Controller Molder
Measurement PHold- T B m I
Pattern Analyzer Measurement
Cavity Pressure Patterns
FIG. 10. Pattern-based cascade control strategy.
errors using an artifical neural network trained on a pattern map. Ma- chine set points will be adjusted using a suitable multivariable control algorithm.
The process model presented in this work represents a first step toward improved on-line part quality monitoring and control capabili- ties for injection molding. The model was designed to be general enough to use for a large number of machine, mold, and material combinations, yet specific enough to accurately represent cavity pressure trends. The model was also designed to be simple enough to allow a pattern map to be generated easily at the plant level, if necessary.
NOMENCLATURE
Cross-sectional area of ram in the hydraulic cylinder Cross-sectional area of ram in the injection cylinder Cross-sectional area of ith section of conduit Surface area of ith section of conduit Tait parameter Viscous damping coefficient Tait parameters for determining BT and uo Universal Tait parameter
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIMULATING MOLD CAVITY PRESSURE PATTERNS 835
Coulombic friction force Heat capacity of polymer of ith section of conduit Parameters for heat capacity relation for upper half of DSC scan Parameters for heat capacity relation for lower half of DSC scan Temperature corresponding to crystalline peak in DSC scan Initial hydraulic diameter of ith section of conduit Hydraulic diameter of ith section of conduit Force acting on polymer within barrel Shear force in the ith section of the conduit Mold cavity height Convective heat transfer coefficient in mold Hydraulic length of the polymer front from the position of the transducer Hydraulic length of the ith section of the conduit covered by polymer Bulk modulus of the polymer Velocity controller gain Hydraulic system gain Thermal conductivity of polymer Mass of injection ram Power index in Cross viscosity equation Polymer pressure in machine barrel Hydraulic holding pressure set point for the packing stage Pressure of fluid in hydraulic cylinder Polymer pressure in the ith section of conduit Mean polymer pressure in the conduit during the filling stage Polymer pressure in the nozzle Volumetric flow of polymer into ith section of conduit Perturbation temperature for Tait equation Perturbation temperature for heat capacity equation Perturbation temperature corresponding to 100% molten polymer Perturbation temperature corresponding to 100% solid polymer Rheological constant in Cross equation Initial temperature of polymer and constant temperature of polymer in the nozzle
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

836 WOLL AND COOPER
7;- Tmid,i
Vhyd
Vbr1,O
Vbrl
V i
Vtot
Temperature of polymer in ith section of conduit Average temperature of polymer between the i and i - 1 sections of conduit Temperature of mold Transition temperature of polymer Time during integration Overall heat transfer coefficient for the ith section of conduit Volume of oil in the hydraulic cylinder Initial volume of polymer in the barrel Volume of polymer in the barrel Volume of ith section of conduit Total volume of polymer that has flowed from the nozzle into the mold Screw velocity Screw velocity set point for velocity controller Screw velocity in axial direction for the ith section Specific volume of polymer at zero pressure Velocity set points for individual machine stages Mold cavity width Screw position (x = 0 when the injection cylinder is charged) Screw positions associated with velocity set point changes Screw position triggering machine switchover Axial direction of polymer flow
Greek Symbols
P Pi
Paw Pnoz
71
72
Rheological constant Shear rate in the ith section of conduit Viscosity of polymer Viscosity of polymer at zero shear rate Volume fraction of solid polymer in the ith section of conduit Density of polymer Density of polymer in the ith section of conduit Average density of polymer in conduit during filling Density of polymer in nozzle Velocity controller time constant Hydraulic system time constant
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

SIM U LATl NG MOLD CAVITY PRESSURE PATTERNS 837
T*
T r z , i
Shear stress at zero shear rate viscosity and critical shear rate Shear stress in the ith section of the conduit
ACKNOWLEDGMENTS
The authors wish to gratefully acknowledge the support the United Technologies Research Center, especially Blair V. Souder who pro- vided invaluable molding advice. The authors also wish to acknowledge the support of the University of Connecticut Precision Manufacturing Institute.
REFERENCES
1.
2.
3.
4.
5 .
6.
7.
8 .
9.
10.
M. R. Kamal, W. I . Patterson, D. A. Fara, and A. Haber, A Study of Injection Molding Dynamics, Soc, Plast, Eng., Annu. Tech. Conf., 41, 658 (1983). D. A. Fara, M. R. Kamal, and W. 1. Patterson, Evaluation of Simple Dynamic Models and Controllers for Hydraulic and Nozzle Pressure in Injection Molding, Polym. Eng. Sci., 25, 714 (1985). M. R. Kamal, W. I. Patterson, N. Conley, D. Abu Fara, and G. Lohfink, Dynamics and Control of Pressure in the Injection Molding of Thermo- plastics, Polym. Eng. Sci., 27, 1403 (1987). V . G. Comes, W. I . Patterson, and M . R. Kamal, An Injection Molding Study. Part 11: Evaluation of Alternative Control Strategies for Melt Tem- perature, Polym. Eng. Sci., 26, 867 (1986). D. E. Gustafson and W. B. Lebow, Model Predictive Control of Injection Molding Machines, in Proc. 26th IEEE Conf. on Decision and Control, 1987, p. 2017. I . 0. Pandelidis and A. R. Agrawal, Self-Tuning Control of RAM Velocity in Injection Molding, Soc. Plast. Eng., Annu. Tech. Conf., 45,235 (1987). C . Ou-Yang and G. P. Maul, Optimal Injection Velocity Profiling, Znt. J . Prod. Res., 27, I I (1989). A. R. Agrawal, I. 0. Pandelidis, and M. Pecht, Injection-Molding Process Control-A Review, Polym. Eng. Sci., 27, 18 (1987). J . W. Mann, Multi-Parameter Process Control for Injection Molding Ma- chines, Soc. Plast. Eng. , Annu. Tech. Conf., 19, 513 (1973). H . T . Plant and R. T. Maher, A Preliminary Analysis of the Injection Molding Process and Factors Effecting Part Size Control, Soc. Ptast. Eng., Annu. Tech. Conf., 21, 74 (1975).
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

838 WOLL AND COOPER
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
M. Takizawa, S. Tanaka, S. Fujita, and K. Kayanuma, Adaptive Control in Injection Molding, Soc. Plast. Eng., Annu. Tech. Conf., 21, 165 (1975). N . H. Golden, N . R. Schott, and R. Youndsaye, An Experimental Evalua- tion of a Peak Cavity Pressure Controller in Injection Molding, Soc. Plast. Eng., Annu. Tech. Conf., 21, 158 (1975). F. Frech and U. Meyer, Measuring and Interpreting the Mold Cavity Pressure in Injection Molding, Ind. Appl. Piezoelectric. Pressure Manage- ment, 3 , 17 (1982) J.-L. Wu, S. J. Chen, and R. Malloy, Development of an On-Line Cavity Pressure-Based Expert System for Injection Molding Process, Soc. Plast. Eng., Annu. Tech. Conf., 49, 444 (1991). S. L. B. Woll, D. J. Cooper, and B. V . Souder, Online Pattern Based Part Quality Monitoring of the Injection Molding Process, Polym. Eng. Sci., 36, 1447 (1996). A. Shankar and F. W. Paul, A Mathematical Model for the Evaluation of Injection Molding Machine Control, Truns. ASME, 104, 86 (1982). C.-P. Chiu, M.-C. Shih, and J . H. Wei, Dynamic Modeling of the Mold Filling Process in an Injection Molding Machine, Polym. Eng. Sci., 31, 1417 (1991). R. S. Spencer and G. D. Gilmore, Some Flow Phenomena in the Injection Molding of Polystyrene, J . Colloid Sci., 6 , 188 (1951). J . M. McKelvey, Polymer Processing, John Wiley and Sons, New York, 1962. J. R. A. Pearson, Meclzunical Principles o j Polymer Melt Processing, Pergarnon Press, Oxford, 1966. D. H. Harry and R. G. Parrott, Numerical Simulation of Injection Mold Filling, Polym. Eng. Sci., 10, 209 (1970). M. R. Kamal and S . Kenig, The Injection Molding of Thermoplastics. Part I: Theoretical Model, Polym. Eng. Sci., 12, 294 (1972). M. R. Kamal and S . Kenig, The Injection Molding of Thermoplastics. Part 11: Experimental Test of the Model, Polyrn. Eng. Sci., 12,302 (1972). M. R. Kamal and P. G. Lafleur, Computer Simulation of Injection Mold- ing, Polym. Eng. Sci., 22, 1066 (1982). T. S . Chung and Y. Ide, Analysis of the Packing Stage in Injection Molding of Disk Cavities, J . Appl . Polym. Sci . , 28, 2999 (1983). P. G. Lafleur and M. R. Kamal, A Structure-Oriented Computer Simula- tion of the Injection Molding of Viscoelastic Crystalline Polymers. Part I: Model with Fountain Flow, Packing, Solidification, Polym. Eng. Sci., 26, 92 (1986). M. R. Kamal and P. G. Lafleur, A Structure-Oriented Computer Simula- tion of the Injection Molding of Viscoelastic Crystalline Polymers. Part 11: Model Predictions and Experimental Results, Polym. Eng. Sci., 26, 103 (1986).
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

S I M U LATl NG MOLD CAVITY PRESSURE PATTERNS 839
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
K. K. Wang and C. A. Heiber, A Viscosity-Based Simulation of the Injec- tion Molding Process, Inferdisiplinav Issues in Malerials Processing and Manufacturing, Annual Meeting, ASME, 1987, Vol. 2, p. 645. J. F. Agassant, H. Alles, S. Philipon, and M. Vincent, Experimental and Theoretical Study of the Injection Molding of Thermoplastic Materials, Polym. Eng. Sci., 28, 460 (1988). B. S. Chen and W. H. Lui, Numerical Simulation and Experimental Inves- tigation of Injection Mold Filling with Melt Solidification, Polym. Eng. Sci., 29, 1039 (1989). H. H. Chiang, C. A. Heiber, and K. K. Wang, A Unified Simulation of the Filling and Postfilling Stages in Injection Molding. Part I : Formulation, Polym. Eng. Sci., 31, 116 (1991). H. H. Chiang, C. A. Heiber, and K. K. Wang, A Unified Simulation of the Filling and Postfilling Stages in Injection Molding. Part 11: Experimental Verification, Polym. Eng. Sci. , 31, 125 (1991). H. H. Chiang, K. Himesekhar, N. Santhanam, and K. K. Wang, Inte- grated Simulation of Fluid Flow and Heat Transfer in Injection Molding for the Prediction of Shrinkage and Warpage, J. Eng. Muter. Techno/., 115, 37 (1993). K. T. Nguyen and M. R. Kamal, Analysis of the Packing Stage of a Viscoelastic Melt, Polym. Eng. Sci., 33, 665 (1993). K. K. Wang and L. Shah, Adaptive On-Line Process Control of Injection Molding Using an Empirical Model, in Proc. of RETEC Con$, 1987, p. 49. R. C. Ricketson and K. K. Wang, Injection Molding Process Control Based on Empirical Models, SOC. Plast. Eng., Annu. Tech. Conf., 45, 231 (1987). J.-L. Wu and S. J. Chen, Pattern Analysis Injection Molding Process: Statistical Correlation Study, Soc. Plast. Eng., Annu. Tech. Conf., 48, 233 (1990). J. Hauessler and J . Wortberg, Quality Assurance in Injection Molding with Neural Networks, Soc. Plast. Eng., Annu. Tech. Conf., 51, 123 ( 1993). D. J. Cooper and S. L. Woll, Using Pressure Sensor Pattern Analysis for Precision Injection Molded Parts, in Proc. World Congr. on Neural Networks, San Diego, CA, 1, 179 (1994). M. Booy, A Network Flow Analysis of Extrusion Dies and Other Flow Systems, Polym. Eng. Sci . , 22, 432 (1982). J.-H. Wei, C.-C. Chang, and C.-P. Chiu, A Nonlinear Dynamic Model of a Servo-Pump Controlled Injection Molding Machine, Polym. Eng. Sci., 34, 881 (1994). P. Zoller, Specific Volume of Polysulfone as a Function of Temperature and Pressure, J. Pnlym. Sci., Polyrn. Phys., 16, 1261 (1978).
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013

840 WOLL AND COOPER
43. 44.
45.
P. G. Tait, Phys. Chem., 2 , 1 (1888). M. M. Cross, Relationship Between Viscoelasticity and Shear-thinning Behavior in Liquids, Rheol. Acta, 18, 609 (1979). W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery, Numerical Recipes in FORTRAN, The Art of Scientific Computing, Cam- bridge University Press, New York, 1992, p. 727. C. J. Yu, J . E. Sunderland, and C. Poli, Thermal Contact Resistance in Injection Molding, Polym. Eng. Sci., 30, 1599 (1990).
46.
Dow
nloa
ded
by [
RM
IT U
nive
rsity
] at
11:
31 2
1 Fe
brua
ry 2
013