Embed Size (px)
Citation preview

1
Figure 1. Demonstrations of walking ability and speed. A five active layer inchworm actuator made from elastomer C actuated at 10 Hz (a-c). A four legged crawling robot made from elastomer A actuated at 1.5 Hz (d-f).
Abstract— A multilayer fabrication method has been used to create crawling soft robots based on dielectric elastomer actuators. These actuators are created without the need for pre-stretch, eliminating the need for rigid components. A four-legged, multi-gait capable crawler can be fabricated in a matter of hours and shows promise for future untethered systems. Studies on inchworm robots show them to be the fastest dielectric elastomer actuator-based systems reported to date, capable of traveling faster than 1 body length / second for the best elastomer available. Most importantly, the devices are primarily soft and deformable, with few rigid attachments.
I. INTRODUCTION
Rapid locomotion in soft robots on land has proven to be a challenge in both tethered [1] and untethered [2] systems. Locomotion in soft robots is typically achieved using pneumatic or hydraulic actuators, and are limited by both the viscoelasticity of the constituent materials, and the rate at which fluid can be pumped to the device. The most common adaptation to achieve rapid motions has been to rely on combustion of a fuel to generate high pressures over short time scales [3]. Although recent advances have increased the speed of pneumatic soft actuators [4], and the resilience of combustion-based actuators [5], fluidic actuaors inevitably require complex infrastructure to store or compress and distribute the fluids, as well as additional stored electrical energy to power fluid distribution. All of these requirements increase the complexity and rigidity of the robot. Alternative solutions include inchworms powered by shape memory alloys (SMA) [6] or electrical motors [7], as well as peristaltic meshworms driven by NiTi alloys [8]. Both SMAs and motors are driven electrically, which avoids the need for additional energy conversion sytems (i.e. from battery to compressed gas) and offsets the inherent disadvantage of using rigid actuators.
In contrast, dielectric elastomers are compliant capacitors which deform as a response to an applied electric field applied between their electrodes [9]. The soft nature of dielectric elastomers and the ability to respond to applied voltages (as opposed to fluid pressures) make them ideal candidates to control the motion of soft robots [10]. Conventionally, dielectric elastomer actuators (DEAs) have been limited by the need for pre-stretching to achieve large
* Research supported by the National Science Foundation (grant number DMR14-20570), the Wyss Institute for Biologically Inspired Engineering and the Link Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Mihai Duduta, David R. Clarke and Robert J. Wood are with the Harvard School of Engineering and Applied Sciences, Cambridge, MA 02138 USA (phone: 617-910-8467; e-mail: [email protected], [email protected], [email protected]). Robert J. Wood is also with the Wyss Institute for Biologically Inspired Engineering, Boston, MA 02115 USA.
actuation strains [11] [12], as well as high driving voltages (>50 V/µm) [13]. Advances in material design [14] and processing [15] have eliminated the need for pre-stretch and have provided a path to low actuation voltages by reducing the thickness of the elastomeric membranes. Recently, we demonstrated a method for building robust multilayer devices that can actuate without pre-stretch at relatively low voltages and at a power densities approaching mammalian muscle [16].
A High Speed Soft Robot Based On Dielectric Elastomer Actuators Mihai Duduta, David R. Clarke, Robert J. Wood

2
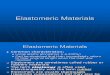
Figure 2. (a) An exploded CAD model showing from bottom to top: Mylar constraining layers, built up device with elastomer on top, final electrode, cover elastomer layer, and carbon fiber stiffeners. The active area of each actuator component is 20 mm by 10 mm. (b) Photo of final device, with added friction pads on the central body.
Generally, there is a trade-off between actuator rigidity and locomotion speed of a DEA-based robot. The fastest demonstrated walking DEA robots use the actuators as artificial muscles, which compress to displace rigid legs [17]. In this mode, DEA displacement arises from compression along the direction of the applied field and not expansion in the plane perpendicular to the field [18]. Beyond reducing the flexibility of the robot, fast locomotion also increases the complexity of fabrication [19]. This occurs because the only way to achieve large displacements (on the order of centimeters) in compression mode is to layer multiple elastomers. Since most elastomer layers are 50 – 100 microns thick, the process requires hundreds and even thousands of layers to achieve sufficient displacement.
Alternatively, other groups have explored using the expansion mode of a DEA to create motion in simple robotic systems with unimorph or bimorph actuators [20]. While the devices can be made predominantly soft, the main downside of expanding DEAs is the low force output, which often cannot overcome the robot weight [21]. One method to increase the force output is to increase the thickness of the elastomer [22]; however, thicker elastomers require larger voltages to deform (>15 kV) making power conversion a challenging task. For DEAs which use the expansion mode, the solution to increase force at low operating voltages is to create multilayer devices, stacking electrodes and elastomers [23]. Our previously reported method [16] is one of a limited set of fabrication techniques that builds multilayer actuators which do not require pre-stretch. However, our earlier work was limited to developing a fabrication method and evaluating the performance of the actuators as a baseline. The current effort is aimed at applying the method to make robots capable of moving their own weight as well as understanding the limitations of high speed locomotion for such lighweight systems.
Crawling or walking robots become more useful when they can carry more than their own weight, preferably incorporating sensing and manipulation capabilties. The reduction in voltage made possible by layering can simplify the requirements for power conversion. In an untethered system, the actuators must produce forces high enough to overcome their own weight, as well as those of the battery
and power converter. Commercially available power converters that boost the output of a battery (3.7 V) to 1 – 6 kV weigh 2 – 5 grams. Comparatively, low weight power conversion systems developed for microrobotics, can weigh as little as 100 milligrams and boost voltages up to several hundreds of volts [24]. Therefore, reductions in operating voltage are needed to minimize the power converter weight and free up additional space for increased on-board energy storage and sensing and control.
Simple, soft robots hold tremendous promise for exploration and use in challenging environments. Targeting soft robots capable of rapid locomotion, we created single and multi-actuator robots based on a simple unimorph geometry using our multilayer fabrication method The displacement capabilities of these unimorph and four legged robots are highlighed in Figure 1. First we discuss the specifics of the fabrication method for rapid fabrication of multigait robots (Section II). The number of layers and the thickness of each membrane dictate both the required actuation voltage and the force output. A model was built to aid experimental design by estimating the maximum energy densities for given material geometries and mechanical properties (Section III). Locomotion studies on unimorph-based inchworm robots elucidated optimal crawling conditions, including attachments and walking surfaces (Section IV). The results of the locomotion studies are compared to the performance of other soft robots and show that these multilayer devices are the fastest DEA-based crawling robots to date (Section V). The current designs are tethered; however, our results indicate that with increased force output, future versions can be made untethered.
II. FABRICATION METHODS
The method for building multilayer actuators consists of a sequence of precursor spin coating, elastomer UV curing and electrode stamping steps, and closely follows our earlier work [16]. The elastomers are made from three different precursors (A, B and C) each having different electromechanical properties. The nomenclature is similar to that used in [16], where A and C are urethane acrylic copolymers, and B is a polybutadiene acrylic copolymer. We chose to compare the device performance across these

3
Figure 3. Dependence of final elastomer layer thickness on spin duration at 3000 RPM for the three different precursors.
Figure 5. Model predictions for blocked force, maximum tip displacement and overall cantilever beam energy density as a function of constraining layer thickness. The maximum energy density in the 8-15 micron range leads to the choice of 12.5 micron Mylar film as constraining layer.
Figure 4. Inchworm deformation modeled as cantilever bending of two symmetrical sections about the center of the device. different polymers because of differences in ease of
processing (A is five times less viscous than B or C), stiffness (B is three times stiffer than A or C) and response speed (A is ten times slower than C). The electrodes are single wall carbon nanotube (SWCNT) mats at densities of ~8 mg/m2. The entire device is made in a serial sequence alternating the deposition of elastomer and electrode layers as illustrated in Figure 2.
The elastomers are deposited by spin coating the liquid precursors, then curing thin layers for 120 seconds under UV light (UVP Longwave Ultaviolet Crosslinker, Cole Parmer, Vernon Hills, IL). The thickness of each layer is determined by the spin speed and duration (Figure 3). The SWCNT mats are transferred by stamping [25] off of Teflon filters (47 miliimeter diameter, 0.2 micron pore size, Spectrum Chemicals, Gardena, CA) through customized masks. The masks give the dimensions of the actuator (20 mm long × 10 mm wide). The base and top elastomer layers are made from elastomer A, without any 1,6-hexanediol diacrylate (HDDA) crosslinker, and serves to electrically insulate the actuators from the environment and bond to additional components. Once all of the spin coating steps are completed, the robot profile is release cut using a 60 Watt CO2 laser, (Universal Laser Systems, Scottsdale, AZ). A thin Mylar sheet (12.5 microns) is attached and serves as the inactive layer in the unimorph. Stiff carbon fiber beams (80 microns thick, 500 microns wide 12 millimeters long, created from a [0/90/0] composite of YSH-50A) are aligned along the short axis of the unimorph to control the actuation direction[26]. Following the guidelines from [22], different types of feet are attached to the two ends of the unimorph to control the crawling direction. On the anterior portion we attached 80 grit sandpaper to promote friction with the substrate. On the posterior we used pins angled backwards to provide asymmetric friction. As a final step, electrical connections are made to all actuator tabs. First the tabs are blade cut to expose SWCNT electrode edges, which are then coated with colloidal silver (Ted Pella, Redding, CA) and attached to copper wires using conductive carbon tape (Electron Microscopy Sciences, Hatfield, PA).
Simple inchworms and four legged robots were created using the method as outlined above. The inchworm robots

4
Figure 6. Walking speeds for the five active layer inchworm actuators made using elastomers A and C on (a) silicone elastomer and (b) paper surfaces. Types of attachments used to improve the efficiency of locomotion: (c) partly bent needles pointing away from the inchworm, (d) hooks pointing towards the inchworm, (e) straight needles pointing away from the inchworm. The tests in (a) and (b) were done using attachment of the type (c) in all tests. The error bars correspond to crawling studies on three different inchworms, each tested five times.
were selected because of their simplicity of fabrication, as well as the many similar examples available in literature to compare crawling speeds. The four-legged robot was selected because it improved control to crawling direction by tuning the gait as a function of applied voltage to the different segments. The improved control aspect is briefly demonstrated here and will be explored in greater detail in -future work. The differences in final shape between the inchworms and the four-legged robots were defined by the release cut profiles, while the shape of the masks through which electrodes are stamped dictated which segments can be actuated. An exploded view of a four-legged robot is presented, alongside a photo for clarity (Figure 2). The fabrication of an inchworm robot is equivalent to the process needed to create one leg of the more complex robot.
III. MULTILAYER CANTILEVER BEAM MODEL
The simplicity of the fabrication method allows for rapid iteration through many material types and geometries. However, without some theoretical understanding of the design, the iterative method proved slow and resource consuming. A model was derived to estimate the deflection, blocked force and energy density of a multilayer DEA beam to simplify the design process, particularly regarding layer thicknesses. The unactuated state is a flat sheet, while the deformed inchworm has a semicircular shape in cross section (Figure 4). The strain in the actuated state is less than 3%, which validates the use of a linear elastic cantilever model, as the mechanical properties of the elastomers are nearly constant in this deformation range.
The bending cantilever is comprised of multiple layers, some of which are dielectric elastomers. The driving force for the induced deformations is the Maxwell stress in the active layers, which causes an electrically-induced strain. The model follows the derivation of a similar model for piezoelectric multilayer cantilevers developed by DeVoe and Pisano[27], incorporating Maxwell stress in the elastomer layers, instead of piezoelectric stresses, and taking the Young’s modulus of the elastomer to be constant across the range of deformation. Other groups have used similar approaches to model DEA cantilevers[28] [29], but only included single layer actuators.
As seen in Figure 4, when actuated the two ends of the inchworm create equal amounts of force in the plane of the walking surface, which does not produce movement in either direction. Anisotropic friction at one or both ends is needed in order to translate the bending of the inchworm into effective forward motion. Assuming the friction could be switched between the front and back segments, we needed to find the desired range of deformation. The maximum deformation in the model was taken as a semicircle because additional bending occassionally caused the robot to flip over rendering it unable to crawl. Smaller deformations caused the robot to be significantly slower, since the length of each step (L-2R) was shorter than steps in half circle deformations. In practice, the curvature of the inchworm was set by tuning the applied voltage (Equation 1):
1R=2βM2− N
V 2 (1)
where β, M and N are parameters which depend on material and geometrical properties and can be derived in a similar manner to [27].
The layer thicknesses were selected by using the model predictions and earlier empirical results. Specifically, the dielectric elastomer layer thickness was selected by limiting the maximum actuation voltage to 3 kV. For both elastomers A and C, an applied electric field of 50 V/µm was sufficient to bend the unimorph to a half circle shape. The maximum actuation voltage and applied field set the elastomer layer thickness to approximately 60 µm. The electrode thicknesses were kept to less than 0.1 µm by using 8 mg/m2 of SWCNTs. The base and cover elastomer layers were made to the same thickness as the dielectric layers to ensure good electrical insulation.
Finally, we used the model to select the thickness of the Mylar constraining layer that maximized device energy density. The model predictions (Figure 5) support the choice of a 12.5 µm thick Mylar layer, the closest commercially available thickness.. A small set of experiments was run to validate the model prediction for free deflection as a function of the constraining layer. The experimental results matched the model within 10% and were only limited by the range of commercially available thicknesses of Mylar (2.5, 12.5, 25,

5
and additional increments of 25 µm).
IV. CRAWLING LOCOMOTION STUDIES
Conversion of unimorph bending to effective inchworm forward motion requires sufficient deformation of the actuator, as well as directional friction to the surface the robot is walking on. These conditions apply to single degree-of-freedom (DOF) actuation, as inchworms can also be assembled in series to create undulatory motion that is less dependent on friction.
Effective directional friction was essential for maintaining a consistent crawling direction. Although several modes of creating directional or anisotropic friction were considered (for example, gecko-inspired dry adhesives[30] [31], electroadhesives[32] [33] and bio-inspired claws[34]) satisfactory locomotion was obtained using aligned sharp needles or hooks on the posterior end. This differential friction mechanism, inspired by earlier work on microspines[35] was considered the simplest and most efficient for such a simple and lightweight (<200 mg) crawler. Robots outfitted with these straight needles were extremely effective and exhibited high crawling speeds of up to one body length per second (BL/s). Multiple types of crawling surfaces were tested, including paper, soft silicone elastomer, and sandpaper of varying roughness.
Three types of feet were tested (hooks, straight and bent needles), for crawling on paper and silicone elastomer substrates are presented in Figure 4. At low frequencies all steps are effective and little slip is observed, therefore the crawling speed is directly proportional to the driving frequency. As the driving frequency is increased, some slipping begins to occur and the speed reaches a plateau. At high frequencies the DEA cannot deform quickly enough and the robot does not move. A demonstration of their crawling ability shows the unimorph robots capable of faster locomotion due to the elastomer used, but worse directional control (Figure 1, and the supplemental video). The actuator control was open loop, as voltage was applied as a square wave of varying frequency using a Trek 610E power supply and a Wavetek 75 Arbitrary Waveform Generator. The behaviors match earlier results that show elastomer C to be capable of actuation at higher driving frequencies than A, due to viscoelastic effects. The relative performance to other DEA-powered and soft robotic systems is compared in depth in Section V.
To demonstrate the versatility of our fabrication method, we also made four-legged crawling robots combining multiple inchworm actuators. While they are considerably slower than the simpler inchworms (Figure 1, and attached video), they are more complex, capable of multiple actuation modes, including different crawling gaits. Moreover, four legged robots have greater directional control and could more readily accommodate an energy supply, power converter, and control unit in future efforts. Future work will also incorporate different elastomer types (such as different formulations with lower viscoelastic losses) to increase crawling speed.
V. COMPARISON TO STATE-OF-THE-ART DEA ROBOTS In general, soft robots offer compliance and robustness at
the cost of actuation speed. Until now, the only strategies for rapid (>1 BL/s) locomotion have been limited to combustion of fuels to achieve rapid deformation of soft baloons, or clever bio-inspired methods, such as impulsive rolling of a soft crawler[36]. Comparatively, crawling or walking DEA-based robots have fallen into one of two categories: slow moving in the same plane of the dielectric elastomer or faster moving in the plane perpendicular to the dielectric elastomer, as listed in Table I. However, fast locomotion has been restricted to primarily rigid robots, in which the DEAs act as artificial muscles displacing rigid body components, in multi legged[37] or annelid-type robots[38].
TABLE I. COMPARISON OF ROBOT SPEEDS
a. Untethered robot
b. Mainly rigid robot c. Mainly soft robot
By building upon our multilayer fabrication method we were able to create devices with fast response times while requiring just five dielectric elastomers layers resulting in actuation at lower voltage and and with higher energy density than previously demonstrated DEA-based unimorphs, for one specific elastomer type. While the current four-legged robot is relatively slow, incorporation of elastomer C, as well as studies of the optimal actuation pattern will increase its speed considerably. Moreover, this novel design can serve as a test bed for creating fast, compliant and untethered DEA-based robots to continue to push the boundaries of soft robotics.
ACKNOWLEDGMENT
M.D. THANKS SEBASTIEN DE RIVAZ FOR HELP WITH CAD MODELING OF THE ACTUATORS. THE FIGURES FOR THIS ARTICLE HAVE BEEN CREATED USING THE SCIDRAW SCIENTIFIC FIGURE PREPARATION SYSTEM [M. A. CAPRIO, COMPUT. PHYS. COMMUN. 171, 107 (2005), HTTP://SCIDRAW.ND.EDU].
REFERENCES [1] M. T. Tolley, R. F. Shepherd, B. Mosadegh, K. C. Galloway, M.
Wehner, M. Karpelson, et al., "A resilient, untethered soft robot," Soft Robotics, vol. 1, pp. 213-223 %@ 2169-5172, 2014.
Demonstration Actuator Type Robot Type Maximum
Speed (BL/s)
Tolley, 2014 Pneumatic 4 legs multigaita,c 0.0077
Choi, 2007 12 Layer DEA Annelidb 0.05
Shian, 2013 Single layer DEA Inchwormc 0.028
Pelrine, 2002 Multilayer DEA Hexapodb 0.64
Multilayer DEA Inchwormc 0.60
This work
Elastomer A – 5 layers Inchworm 0.25
Elastomer C – 5 layers Inchworm 1.03
Elastomer A – 5 layers 4-legged 0.115

6
[2] R. F. Shepherd, F. Ilievski, W. Choi, S. A. Morin, A. A. Stokes, A. D. Mazzeo, et al., "Multigait soft robot," Proceedings of the National Academy of Sciences, vol. 108, pp. 20400-20403 %@ 0027-8424, 2011.
[3] R. F. Shepherd, A. A. Stokes, J. Freake, J. Barber, P. W. Snyder, A. D. Mazzeo, et al., "Using explosions to power a soft robot," Angewandte Chemie International Edition, vol. 52, pp. 2892-2896 %@ 1521-3773, 2013.
[4] B. Mosadegh, P. Polygerinos, C. Keplinger, S. Wennstedt, R. F. Shepherd, U. Gupta, et al., "Pneumatic networks for soft robotics that actuate rapidly," Advanced Functional Materials, vol. 24, pp. 2163-2170 %@ 1616-3028, 2014.
[5] N. W. Bartlett, M. T. Tolley, J. T. B. Overvelde, J. C. Weaver, B. Mosadegh, K. Bertoldi, et al., "A 3D-printed, functionally graded soft robot powered by combustion," Science, vol. 349, pp. 161-165 %@ 0036-8075, 2015.
[6] M.-S. Kim, W.-S. Chu, J.-H. Lee, Y.-M. Kim, and S.-H. Ahn, "Manufacturing of inchworm robot using shape memory alloy (SMA) embedded composite structure," International journal of precision engineering and manufacturing, vol. 12, pp. 565-568 %@ 1229-8557, 2011.
[7] T. Umedachi, V. Vikas, and B. A. Trimmer, "Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots," Bioinspiration & biomimetics, vol. 11, pp. 025001 %@ 1748-3190, 2016.
[8] S. Seok, C. D. Onal, K.-J. Cho, R. J. Wood, D. Rus, and S. Kim, "Meshworm: a peristaltic soft robot with antagonistic nickel titanium coil actuators," IEEE/ASME Transactions on mechatronics, vol. 18, pp. 1485-1497 %@ 1083-4435, 2013.
[9] R. Pelrine, R. Kornbluh, and G. Kofod, "High-Strain Actuator Materials Based on Dielectric Elastomers," Advanced Materials, vol. 12, pp. 1223-1225 %@ 1521-4095, 2000.
[10] R. Pelrine, R. D. Kornbluh, Q. Pei, S. Stanford, S. Oh, J. Eckerle, et al., "Dielectric elastomer artificial muscle actuators: toward biomimetic motion," 2002, pp. 126-137.
[11] R. Pelrine, R. Kornbluh, Q. Pei, and J. Joseph, "High-speed electrically actuated elastomers with strain greater than 100%," Science, vol. 287, pp. 836-839 %@ 0036-8075, 2000.
[12] S. M. Ha, W. Yuan, Q. Pei, R. Pelrine, and S. Stanford, "Interpenetrating Polymer Networks for High-Performance Electroelastomer Artificial Muscles," Advanced Materials, vol. 18, pp. 887-891 %@ 1521-4095, 2006.
[13] R. Pelrine, R. Kornbluh, J. Joseph, R. Heydt, Q. Pei, and S. Chiba, "High-field deformation of elastomeric dielectrics for actuators," Materials Science and Engineering: C, vol. 11, pp. 89-100 %@ 0928-4931, 2000.
[14] X. Niu, H. Stoyanov, W. Hu, R. Leo, P. Brochu, and Q. Pei, "Synthesizing a new dielectric elastomer exhibiting large actuation strain and suppressed electromechanical instability without prestretching," Journal of Polymer Science Part B: Polymer Physics, vol. 51, pp. 197-206 %@ 1099-0488, 2013.
[15] A. Poulin, S. Rosset, and H. R. Shea, "Printing low-voltage dielectric elastomer actuators," Applied Physics Letters, vol. 107, pp. 244104 %@ 0003-6951, 2015.
[16] M. Duduta, R. J. Wood, and D. R. Clarke, "Multilayer Dielectric Elastomers for Fast, Programmable Actuation without Prestretch," Advanced Materials %@ 1521-4095, 2016.
[17] Q. Pei, R. Pelrine, S. Stanford, R. D. Kornbluh, M. S. Rosenthal, K. Meijer, et al., "Multifunctional electroelastomer rolls and their application for biomimetic walking robots," 2002, pp. 246-253.
[18] G. Kovacs, L. Düring, S. Michel, and G. Terrasi, "Stacked dielectric elastomer actuator for tensile force transmission," Sensors and Actuators A: Physical, vol. 155, pp. 299-307 %@ 0924-4247, 2009.
[19] J. Eckerle, S. Stanford, J. Marlow, R. Schmidt, S. Oh, T. Low, et al., "Biologically inspired hexapedal robot using field-effect electroactive elastomer artificial muscles," 2001, pp. 269-280.
[20] C. Jordi, S. Michel, and E. Fink, "Fish-like propulsion of an airship with planar membrane dielectric elastomer actuators," Bioinspiration & biomimetics, vol. 5, pp. 026007 %@ 1748-3190, 2010.
[21] H. Godaba, J. Li, Y. Wang, and J. Zhu, "A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator," IEEE Robotics and Automation Letters, vol. 1, pp. 624-631 %@ 2377-3766, 2016.
[22] S. Shian, K. Bertoldi, and D. R. Clarke, "Use of aligned fibers to enhance the performance of dielectric elastomer inchworm robots," 2015, pp. 94301P-94301P-9.
[23] O. A. Araromi, A. T. Conn, C. S. Ling, J. M. Rossiter, R. Vaidyanathan, and S. C. Burgess, "Spray deposited multilayered dielectric elastomer actuators," Sensors and Actuators A: Physical, vol. 167, pp. 459-467 %@ 0924-4247, 2011.
[24] M. Karpelson, G.-Y. Wei, and R. J. Wood, "Milligram-scale high-voltage power electronics for piezoelectric microrobots," 2009, pp. 2217-2224 %@ 1424427886.
[25] S. Shian, R. M. Diebold, and D. R. Clarke, "Tunable lenses using transparent dielectric elastomer actuators," Optics express, vol. 21, pp. 8669-8676 %@ 1094-4087, 2013.
[26] S. Shian, K. Bertoldi, and D. R. Clarke, "Dielectric Elastomer Based “Grippers” for Soft Robotics," Advanced Materials, vol. 27, pp. 6814-6819 %@ 1521-4095, 2015.
[27] D. L. DeVoe and A. P. Pisano, "Modeling and optimal design of piezoelectric cantilever microactuators," Journal of Microelectromechanical systems, vol. 6, pp. 266-270 %@ 1057-7157, 1997.
[28] B. Balakrisnan, A. Nacev, and E. Smela, "Design of bending multi-layer electroactive polymer actuators," Smart Materials and Structures, vol. 24, pp. 045032 %@ 0964-1726, 2015.
[29] C. H. Nguyen, G. Alici, and R. Mutlu, "Modeling a soft robotic mechanism articulated with dielectric elastomer actuators," 2014, pp. 599-604 %@ 2159-6247.
[30] A. Parness, D. Soto, N. Esparza, N. Gravish, M. Wilkinson, K. Autumn, et al., "A microfabricated wedge-shaped adhesive array displaying gecko-like dynamic adhesion, directionality and long lifetime," Journal of the Royal Society Interface, vol. 6, pp. 1223-1232 %@ 1742-5689, 2009.
[31] M. J. Spenko, G. C. Haynes, J. A. Saunders, M. R. Cutkosky, A. A. Rizzi, R. J. Full, et al., "Biologically inspired climbing with a hexapedal robot," Journal of Field Robotics, vol. 25, pp. 223-242 %@ 1556-4967, 2008.
[32] J. Shintake, S. Rosset, B. Schubert, D. Floreano, and H. Shea, "Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators," Advanced Materials, vol. 28, pp. 231-238 %@ 1521-4095, 2016.
[33] H. Prahlad, R. Pelrine, S. Stanford, J. Marlow, and R. Kornbluh, "Electroadhesive robots—wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology," 2008, pp. 3028-3033 %@ 1424416469.
[34] B. F. Seitz, B. Goldberg, N. Doshi, O. Ozcan, D. L. Christensen, E. W. Hawkes, et al., "Bio-inspired mechanisms for inclined locomotion in a legged insect-scale robot," 2014, pp. 791-796.
[35] A. T. Asbeck, S. Kim, A. McClung, A. Parness, and M. R. Cutkosky, "Climbing walls with microspines," 2006.
[36] H.-T. Lin, G. G. Leisk, and B. Trimmer, "GoQBot: a caterpillar-inspired soft-bodied rolling robot," Bioinspiration & biomimetics, vol. 6, pp. 026007 %@ 1748-3190, 2011.
[37] C. T. Nguyen, H. Phung, T. D. Nguyen, C. Lee, U. Kim, D. Lee, et al., "A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators," Smart Materials and Structures, vol. 23, pp. 065005 %@ 0964-1726, 2014.
[38] K. Jung, J. C. Koo, Y. K. Lee, and H. R. Choi, "Artificial annelid robot driven by soft actuators," Bioinspiration & biomimetics, vol. 2, pp. S42 %@ 1748-3190, 2007.