Embed Size (px)
Citation preview

A Hybrid Algorithm for Crustal Velocity Modeling
Federico Ramırez∗, Olac Fuentes†, Rodrigo Romero† and Aaron Velazco‡∗Department of Computer Science, Instituto Tecnologico de Apizaco,
Av Instituto Tecnologico s/n, Apizaco, Tlaxcala, MexicoEmail: federico [email protected]†Department of Computer Science,‡Department of Geological Science
University of Texas at El Paso,500 West University Avenue, El Paso, TX-79902, USA
Email: {fuentes, raromero2, aavelazco}@utep.edu
Abstract—We present a hybrid method to produce a velocitymodel of the Earth’s crust using evolutionary and seismictomography algorithms. This method takes advantage of theglobal search ability of an evolution strategy and the quickconvergence of an iterative three-dimensional seismic tomog-raphy technique to generate a model of the Earth’s crustalstructure from recorded arrival times of wave fronts producedby controlled sources. The evolution strategy finds a three-dimensional velocity model with constant lateral velocity layersthat minimizes the root mean square residuals computed bythe tomographic algorithm. The model found is provided asthe initial search point to a first arrival traveltime seismictomography algorithm, which then computes the final three-dimensional velocity model. The method was tested with a real-world data set from an active source experiment performed inthe Potrillo Volcanic Field, in Southern New Mexico. Resultsshow that our hybrid method obtains faster convergence andmore accurate results than the conventional methods, and doesnot require an expert-supplied one-dimensional model for theseismic tomography procedure.
Keywords-Hybrid algorithm; Evolution Strategies; SeismicTomography; Velocity model;
I. INTRODUCTION
Seismic tomography computes images of the Earth’scrustal velocity structure that are used to determine andanalyze the internal crustal properties of the Earth. Input dataare usually obtained from a set of receivers placed on theEarth surface to record seismic signals generated by passiveor active energy sources. Seismic energy can be produced atpredetermined locations with controlled explosions, whichare referred to as shotpoints and are one type of activesource, and it can be sensed by a set of receivers, suchas geophones, distributed over the area to survey. Sourceand receiver locations together with measured first arrivaltravel times of seismic waves can then be utilized to gen-erate crustal models by combining algorithms for forwardmodeling, inversion, search, and optimization.
Velocity models obtained with seismic tomography pro-vide information that can be used for a wide variety ofapplications such as archeological surveys [13], quality
control and assessment of engineering projects [11], anddiscovery of deposits of water, oil, or waste material [10].
Conventional methods for seismic tomography rely ongradient information to guide the search; however, due tonoise and the complexity of the search space, multiple localminima commonly exist, thus the accuracy of the final solu-tion depends on the choice of the initial search point, whichis normally provided by a human expert [3]. This results ina time-consuming trial-and-error process. Such dependenceis typical in standard optimization methods - they need agood initial approximation to find a good solution. With agood initial model, these local optimization algorithms havethe advantage of being faster than global methods to reachsuccessful results. In contrast with gradient-based meth-ods, global search methods such as evolutionary algorithms(EAs) can search in very large spaces and are not dependenton the initial solution’s proximity to the optimum. EAs havebeen used to tackle Geophysics inversion problems [5], [12],[14]. In geology, evolutionary algorithms have been used incombination with different techniques [4], [7], [9], yieldingsatisfactory results.
We designed a hybrid method for seismic tomography thatconsists of two top-level steps. The first step uses an evolu-tion strategy (ES) to find a one-dimensional (1D) model, oran equivalent flat-layered 3D velocity model, of the surveyedregion. The second step uses a first arrival traveltime seismictomography algorithm, which was developed by Vidale [16]and Hole [8], to compute a 3D velocity model with complexlateral velocity variations. To compute the 1D model, the ESsearches for a tridimensional velocity model that minimizesthe average root mean square (rms) residuals between firstarrival times recorded by receivers and those calculatedusing the model. The model is discretized at 1km intervalsin three dimensions and it assumes constant velocity withineach depth layer. The evolution strategy searches for a setof ordered pairs that determines the inflexion points of the1D model. The remaining values of the model are calculatedusing linear interpolation. Running times are short becauseof the low dimensionality of the search problem and the

fact that the 1D models obtained after a few generationsare accurate enough to be used as starting point to ensurethat the 3D gradient-based search will reach a near-optimalsolution.
To evaluate the presented method we used data obtainedfrom the Potrillo volcanic field experiment [1]. Test volumedimensions for the experiment are 231 km in width, 26 kmin length, and 69 km in depth. The volume was discretizedin intervals of 1 km, which produced a 3D grid with 414,414vertices. The main goal of the method is to compute velocityvalues for each vertex of the test volume using as inputs themeasurements of first arrival travel times of seismic wavesgenerated by 7 shot points and recorded by 793 geophones,the locations of sources and receivers, a velocity range, anda monotonicity constraint on vertex velocities to ensure thatvelocities increase with depth in the test volume. The largenumber of parameters is the main challenge to solve thisproblem.
The next section briefly describes the fundamentals of ESalgorithms. Section 3 describes how we used ES to find theinitial crustal velocity model for the seismic tomographyalgorithm. Section 4 presents an analysis and some generated1D models. The last section presents conclusions and futurework.
II. EVOLUTION STRATEGIES
Evolution Strategies (ES) [15], [2] are a class of proba-bilistic search algorithms loosely based on biological evo-lution that have been applied successfully to optimizationproblems in poorly-modeled domains and in the presence ofnoisy data [6]. ES are based on processing a population ofindividuals. An individual is represented by a vector of realnumbers, which is a well-suited representation for problemsdealing with continuous parameters. Each vector element isreferred to as an object variable xi and it has an associatedstandard deviation σi, which is referred to as the strategyparameter.
The ES algorithm starts by randomly generating a pop-ulation of individuals; each individual represents a searchpoint in the space of potential solutions of the problem ofinterest. Subsequently this population is updated by meansof randomized processes of recombination, mutation, andselection, which are inspired by biological evolution. Eachindividual is evaluated according to a fitness function thatdepends on the problem to be solved. The selection processis completely deterministic and favors fit individuals fromthe current population to reproduce in the next generation.For (µ+λ)-selection, the µ best individuals from the unionof µ parents and λ offspring are selected as parents toform the next generation. For (µ, λ)-selection, the µ bestindividuals are selected only from the λ offspring; whereµ < λ.
The recombination process allows combining informationfrom different members of the population to create offspring.
Typical mechanisms include discrete recombination, whichcreates two offspring vectors from two parent vectors copy-ing selected elements from each parent, and intermediaterecombination, which commonly uses an arithmetic aver-age, possibly weighted, or extrapolation in the direction ofincreasing fitness.
Mutation consists of generating random changes in anindividual and often provides new relevant information. Mu-tation is applied independently to each object variable of anindividual while strategy parameters may be mutated using amultiplicative logarithmic Gaussian process as shown below:
σ′i = σi × exp(N(0, 1) +Ni(0, 1))
x′i = xi + σi ×N(0, 1)
where N(0, 1) is a normally distributed random variablehaving an expectation of zero and a standard deviation ofone; Ni(0, 1) indicates that the random variable is sampledevery time the index i changes.
III. PROPOSED ALGORITHM TO FIND INITIAL SEARCHPOINT
In this section we present our novel method to computea crustal velocity model of the earth using a (µ + λ)-ES.The test volume of the Earth’s crust is discretized as a verylarge 3D grid of vertices, where each vertex represents acrustal velocity value. The goal of this method is to find a1D velocity model, or its equivalent flat-layered 3D model,with minimal rms residuals between calculated first arrivaltimes and traveltimes measured from waves sensed by thereceivers. Since the number of vertex velocities to computein a 3D model is very large, our first goal is to find a1D model where each layer in the depth dimension has aconstant lateral velocity and each layer satisfies the velocityconstraint vi < vj at depths di and dj respectively, wheredi < dj , for any two layer velocities vi and vj in the model.To reduce the load on the ES algorithm further, we searchonly for the 1D model inflection points and calculate theremaining points using linear interpolation
To find the inflection points of the 1D model, we use a(µ + λ)-selection ES because the number of parameters toevolve is small and parameters are real values within theinput velocity range. Thus, an individual represents a smallset of layer depth values of the 3D model and their associatedvalues of constant lateral velocity.
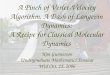
A. Individual RepresentationEach individual has two parts with p elements. The first
part contains p layer velocity values and the second partcontains p layer depths as shown in Figure 1. Each partof an individual is a sorted set of values to meet thevelocity constraint expressed above. The number of 1Dmodel inflexion points to search is provided by the user. Thevalues of velocity of the layers between a pair of inflexionpoints are calculated by linear interpolation.

Figure 1. 1D and 3D representation of an evolution strategy individualshowing constant velocity values in each depth layer
B. Fitness Function
To evaluate each individual, which represents a 1D veloc-ity model, we compute the first arrival times throughout thediscretized velocity model and then we back trace seismicwaves from receivers to sources through the resulting dis-cretized traveltime field using the seismic tomography pro-cedures deve—loped by Vidale [16] and Hole [8]. Computedfirst arrivals of the back-traced waves are compared againstthe observed first arrival times from the field experiment.The average of the root mean squared differences betweenobserved and calculated times, referred to as the residuals,is calculated for all sensors and shotpoints and returned asa fitness value. The fitness function is computed with thefollowing equation:
f(Ip) =1
M
M∑i=1
√√√√ 1
N
N∑j=1
(toij − tcij)2
where Ip is an individual with p inflexion points, M is thenumber of shotpoints, N is the number of sensors, toij isthe measured first arrival traveltime between shotpoint i andsensor j , and tcij is the computed first arrival traveltimecounterpart of toij .
To accelerate the ES search, each individual is sorted be-fore evaluation using the velocity constraint at the beginningof this section. Although the crustal structure may containsoft material that reduces the velocity of seismic waves, thisis not considered by the ES to generate the 1D velocitymodel.
IV. EXPERIMENTAL RESULTS
In this section we present the results achieved by applyingthe presented hybrid approach to the data collected froman experiment performed in the Potrillo volcanic field [1].With the reference 1D model provided by a geologist, theobserved traveltimes, the shotpoints, the receiver locations,and the model geometry, we ran the Vidale-Hole seismictomography algorithm. The first iteration of the algorithmproduced a velocity model with an rms residual time of
Table IEXPERIMENTAL RESULTS FOR EACH 1D MODEL
1D Model Generator RMS RESIDUAL TIME (seconds)1D Model Final Model
Expert reference 0.2476 0.0770ES (6 points) 0.2518 0.0813ES (7 points) 0.2149 0.0853ES (8 points) 0.1880 0.0765ES (9 points) 0.1986 0.0787
0.2476s. The final model obtained had an overall rmsresidual time of 0.0770s.
To determine whether our hybrid approach can produce asimilar or better result without using an initial 1D modelprovided by a domain expert, we applied an evolutionstrategy to find an initial 1D model using the velocityconstraint and the fitness function described in the previoussection.
(µ + λ)-ES was applied to find 1D models with 6, 7, 8and 9 inflexion points and we used interpolation to generateinitial 3D velocity models for the seismic tomography proce-dure used as the second step of the hybrid algorithm. The ESparameters were an initial population of µ = 30 individuals;each individual consisted of 2 ∗ p elements, where p isthe number of inflexion points. The first p elements weresorted real numbers in the user-input velocity range of 1to 10 Km/s and the second p numbers were sorted integernumbers in the user-input depth range of 1 to 69 Km;objective variables were randomly generated with a uniformprobability density function. Initial standard deviations usedfor mutation were also random numbers, but they weregenerated with a normally distributed probability densityfunction with zero mean and standard deviation equal to0.5.
Each ES test ran for 50 generations. In each generation,a new population of λ = 30 offspring was reproducedby means of mutation over 60% of the individuals; theremaining 40% were generated by recombination using thefollowing types of recombination operators: intermediate,discrete, global intermediate and global discrete operations.Ten percent was allocated for individuals of each operatortype. Before passing each individual to a new population,individual elements were sorted with respect to both depthand velocity.
Table I shows the results of tests using from 6 to 9inflection points and a test with a 1D model provided byan expert geologist applied to data; the values shown inthe table are the average of five runs for each case. Thefirst column identifies the generator of the 1D model usedfor the seismic tomography algorithm; the second columnshows the fitness value or rms residual time average of the1D models; and the third column shows the values of thefinal rms residuals obtained using each of the 1D models asinput for the tomographic algorithm.

We can observe that the all the 1D models produced by ESare competitive with those produced by the expert, and thatthe model with 8 inflection points produces the best searchpoint and final rms residual time of the seismic tomographyalgorithm. 1D models provided by ES after 50 generationshave rms residual times below 0.26 s, which is a user-definedthreshold. In addition, initial rms residuals of 1D modelswith 7 or more inflection points are below the value ofthe model provided by the expert. Final rms residual valuesare clustered around the value obtained using the referencemodel, but using 1D models with 8 and 9 inflection pointsproduced the best final residual values.
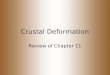
Figure 2. The expert-generated 1D model and the best model generatedby our algorithm, which uses eight inflexion points.
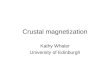
Figure 3. Residuals at different points of the search generated by theVidale-Hole algorithm using the expert-provided and ES generated startingpoints.
Figure 2 shows a comparison of the model generated bythe expert and the best 1D model generated by ES. Themodels are remarkably similar and lead to similar initial andfinal errors, with the ES-generated model having superiorperformance. Figure 3 shows the performance of the Vidale-Hole seismic tomography algorithm using the starting pointprovided by the expert and the one obtained by ES. It canbe seen that results are similar, with ES producing smallerresiduals at every point of the search.
V. CONCLUSION AND FUTURE WORK
We proposed a two-step hybrid algorithm that combinesa (µ + λ)-selection evolution strategy and a first arrivaltraveltime seismic tomography algorithm to generate a 3D
crustal velocity model of the Earth. The ES was appliedto find a 1D velocity model comprised of a set of layersof constant lateral velocity. The ES was used to search forinflexion points of the 1D velocity model and the full modelvertex velocity values were interpolated. Using an ES togenerate an initial 1D velocity model eliminates the need fora 1D model provided by an expert geologist for the seismictomography algorithm and enables users to define a targetinitial rms residual for the seismic tomography algorithm.The latter point is especially important because large initialrms residuals in the model tend to be associated with lackof model convergence. We tested this method using 6 to9 inflexion points per 1D model. Our results show that ahigher number of inflexion points in the 1D model tendsto decrease the rms residual time for the model. However,using more inflexion points translates into a larger searchspace, which results in longer computation times to find agood solution.
In this work we searched for an initial model for theseismic tomography algorithm with constant lateral velocitylayers. Future work includes generating a model with three-dimensional regions of constant lateral velocity using anevolutionary algorithm with recursive subdivision of thesearch space. Additionally, we will experiment with theanalysis of other seismic data sets that are currently beinggenerated by our group and others.
ACKNOWLEDGMENT
This material is based upon work supported in part bythe National Science Foundation under CREST Grant No.HRD-0734825 and Grant No. CNS-0923442. Any opinions,findings, and conclusions or recommendations expressed inthis material are those of the author(s) and do not necessarilyreflect the views of the National Science Foundation (NSF).
REFERENCES
[1] M. G. Averill. A Lithospheric Investigation of the SouthernRio Grande Rift. PhD thesis, Department of GeologicalSciences, University of Texas at El Paso, El Paso, TX, 2007.
[2] Thomas Back, Frank Hoffmeister, and Hans-Paul Schwefel. Asurvey of evolutionary strategies. In Proceedings of the FourthInternational Conference on Genetic Algorithms. MorganKaufmann Publishers, Inc, 1991.
[3] Ahmet T. Basokur, Irfan Akca, and Nedal W.A. Siyam. Hy-brid genetic algorithms in view of the evolution theories withapplication for the electrical sounding method. GeophysicalProspecting, 55(3):393–406, 2007.
[4] Maximiliano J. Bezada and Colin A. Zelt. Gravity inversionusing seismically derived crustal density models and geneticalgorithms: an application to the Caribbean-South AmericanPlate boundary. Geophysical Journal International, 185(2),2011.

[5] Sung-Joon Chang and Chang-Eob Baag. Crustal structurein southern korea from joint analysis of regional broadbandwaveforms and travel times. Bulletin of the SeismologicalSociety of America, 96(3):856–870, June 2006.
[6] Olac Fuentes and Randal C. Nelson. Learning dextrousmanipulation strategies for multifingered robot hands usingthe evolution strategy. Machine Learning, 31:223–237, 1998.
[7] Gorkhan Gokturkler. A hybrid approach for tomographicinversion of crosshole seismic first-arrival times. Journal ofGeophysics and Engineering, 8(99), 2011.
[8] J. A. Hole. Nonlinear high-resolution three-dimensionalseismic travel time tomography. Journal of GeophysicalResearch, 97(B5):65536562, 1992.
[9] N. N. Kishore, P. Munshi, M. A. Ranamale, V. V. Ramakr-ishna, and W. Arnold. Tomographic reconstruction of defectsin composite plates using genetic algorithms with clusteranalysis. Research in Nondestructive Evaluation, 22(1):31–60, 2011.
[10] Eva Lanz, Hansruedi Maurer, and Alan G. Green. Refractiontomography over a buried waste disposal site. Geophysics,63(4):1414–1433, 1998.
[11] Lanbo Liu and Tieshuan Gu. Seismic non-destructive testingon a reinforced concrete bridge column using tomographicimaging techniques. Journal of Geophysics and Engineering,2(23), 2005.
[12] Klaus Mosegaard and Malcolm Sambridge. Monte Carloanalysis of inverse problems. Inverse Problems, 18(3), 2002.
[13] L. Polymenakos, , and S. P. Papamarinopoulos. Exploringa prehistoric site for remains of human structures by three-dimensional seismic tomography. Archaeological Prospec-tion, 12(4):221–233, 2005.
[14] G.R. Potty and J.H. Miller. Tomographic mapping of sedi-ments in shallow water. Oceanic Engineering, IEEE Journalof, 28(2):186 – 191, april 2003.
[15] I. Rechenberg. Evolutionsstrategie: Optimierung technis-cher Systeme nach Prinzipien der biologischen Evolution.Frommann-Holzboog, Stuttgart, 1973.
[16] John E. Vidale. Finite-difference calculation of traveltimes inthree dimensions. Geophysics, 55(5):521–526, May 1990.