Embed Size (px)
Citation preview

International Journal on Document Analysis and Recognition manuscript No.(will be inserted by the editor)
A Local Evaluation of Vectorized Documents by means of PolygonAssignments and Matching.
R. Raveaux, J. C. Burie and J. M. Ogiere-mail: [email protected]
L3I laboratory, University of La Rochelle, av M. Crepeau, 17042 La Rochelle Cedex 1, France
The date of receipt and acceptance will be inserted by the editor
Abstract. This paper presents a benchmark for eval-uating the Raster to Vector conversion systems. Thebenchmark is designed for evaluating the performanceof graphics recognition systems on images that containpolygons (solid) within the images. Our contribution istwo-fold, an object mapping algorithm to spatially locateerrors within the drawing, and then a cycle graph match-ing distance that indicates the accuracy of the polygo-nal approximation. The performance incorporates manyaspects and factors based on uniform units while themethod remains non-rigid (thresholdless). This bench-mark gives a scientific comparison at polygon level of co-herency and uses practical performance evaluation meth-ods that can be applied to complete polygonization sys-tems.
A system dedicated to cadastral map vectorizationwas evaluated under this benchmark and its performanceresults are presented in this paper. By stress testing agiven system, we demonstrate that our protocol can re-veal strengths and weaknesses of a system. The behaviorof our set of indices was analyzed when increasing imagedegradation. We hope that this benchmark will help as-sessing the state of the art in graphics recognition andcurrent vectorization technologies.
Key words: Vectorized Object Comparison – PolygonAssignment – Polygonization Accuracy – Performanceevaluation – Polygon detection quality – Graphics recog-nition – Machine drawing understanding system
1 Introduction
In this paper, the question of performance evaluationis discussed. A bird’s-eye view methodology is adoptedstarting from the generic idea about evaluation of vec-torization and the main principles of the proposed ap-proach. Then, the introduction turns into a deeper dis-cussion explaining in details both related works and thedescription of the proposed method.
Correspondence to: M. Raveaux
1.1 Bird’s-eye view of vectorization evaluation
Driven by the need to convert a large number of hardcopy engineering drawings into CAD files, raster to vec-tor conversion has been a field of intense research forthe last four decades. In addition to research prototypesin several academic and industrial research centers, sev-eral commercial software products are currently avail-able to assist users in converting raster images to vector(CAD) files. However, the process of selecting the rightsoftware for a given vectorization task is still a difficultone. Although trade magazines have published surveys ofthe functionality and ease of use of vectorization prod-ucts [1], a scientific, well designed, comparison of theauto-vectorization capability of the products was still re-quired.
Responding to this need, the International Associ-ation for Pattern Recognition’s technical committee ongraphics recognition (IAPR TC10) organized the seriesof graphics recognition contests. The first contest, held atthe GREC’95 workshop in University Park, PA, focusedon dashed line detection [2], [3], [4]. The second con-test, held at the GREC’97 workshop in Nancy, France,attempted to evaluate complete (automatic) raster tovector conversion systems [5], [6], [7]. The third con-test, held off-line associated with the GREC’99 work-shop in Jaipur, India, also aimed to evaluate complete(automatic) raster to vector conversion systems. Thesecontests tested the abilities of participating algorithms/ systems to detect segments and arcs from raster im-ages. They adopted a set of performance metrics basedon the published line detection performance evaluationprotocol [8] to evaluate and compare the participatingalgorithms / systems on-line at the workshop site withtest data of different quality and complexity. Pre-contesttraining images and the performance evaluation softwarewere provided before the contests, so prospective par-ticipants could try their systems and improve them foroptimal performance. Test images could be synthesizedand/or real scanned images.
Performance evaluation and benchmarking have beengaining acceptance in all areas of computer vision andso in the graphics recognition field of science.

2 R. Raveaux: Evaluation of Vectorized Documents
Early work on this topic was carried out to evaluateperformance of thinning algorithms. [9] was the first topropose a general approach for performance evaluationof image analysis, with thinning taken as a case in point.Evaluation and comparison of thinning algorithms havealso been performed by [10], [11], [12] and [13]. Someof these evaluation and comparison works were carriedout from the viewpoint of OCR, while the work of [12]is domain independent. Although thinning may also beemployed as preprocessing of line detection, the latterhas different characteristics and therefore requires a dif-ferent evaluation protocol.
Vectorization and other line detection techniques havebeen developed to convert images of line drawings invarious domains from pixels to vector form (e.g., [14],[15], [16]) and a number of methods and systems havebeen proposed and implemented (e.g., [17], [18], [19],[20]). Objective evaluations and quantitative compar-isons among the different shape detection algorithms areavailable thanks to protocols issued from GREC contests[21], [22], [23] that provide quantitative measurements.
Performance evaluation of vectorization and line de-tection has been reported by [3], [24], [8] and [5]. Kong etal. [3] propose a quantitative method for evaluating therecognition of dashed lines. Hori and Doermann [24] pro-pose a quantitative performance measurement methodol-ogy for task-specific raster to vector conversion. Wenyinand Dori [8] present a protocol for evaluating the recog-nition of straight and circular lines. Phillips and Chhabra[5] define a methodology for evaluating graphics recog-nition systems operating on images that contain vari-ous objects such as straight lines and text blocks. All ofthese methods are limited in their applicability and arediscussed in the next subsection.
In this article, we present a benchmark designed forevaluating the performance of graphics recognition sys-tems on images that contain occlusions within the im-ages. Most engineering documents could be approximatedby polygons and our study focuses on these particularprimitives. For instance, parcels into a cadastral mapare well modeled by polygons. Accurate and efficientvectorization of line drawings is essential for any higherlevel processing in document analysis and recognitionsystems. In spite of the prevalence of vectorization meth-ods, no standard for their performance evaluation proto-col exists at a polygon level. All prior works focused ona lower level of consistency (arcs and segments). We pro-pose a protocol for evaluating polygon extraction to helpcompare, select, improve, and even design object detec-tion algorithms to be incorporated into drawing recog-nition and understanding systems. The protocol can beseen as an extension to polygon level of related approachesby proposing an evaluation which is closer to the userrequirements (i.e. at a semantic level). This new view-point on the problem involves two local dissimilaritymeasures for estimating polygon detection and approxi-mation quality.
1.2 Related work
Kong et al. [3] have developed a protocol and a systemfor systematically evaluating the performance of line de-tection algorithms, mainly for dashed-line detection al-gorithms. They define the overlap criteria of the matchbetween a ground truth and a detected line based on theangle and the distance between them, and the partialoverlap is also considered. They do not allow for frag-mentation of detected lines. They use several arbitraryand rigid thresholds, for example, the angle should beless than 3◦ and the distance between two lines less than5 cells.
Hori and Doermann [24] instantiate and extend Har-alick’s framework for performance characterization in im-age analysis [9], in an application-dependent manner, formeasuring the performance of raster to vector conver-sion algorithms. They provide a set of metrics (evalua-tion contents) which is specifically geared to vectoriza-tion of mechanical engineering drawings. The ”applica-tions” addressed in the work are thinning, medial linefinding, and line fitting all low-level techniques that donot completely constitute vectorization. It is hard to ex-tend the work to evaluate a complete vectorization sys-tem. Hori and Doermann’s protocol does not distinguishbetween detection rate and false alarm rate. It does notinclude an overall evaluation metric. It does not allowfor fragmentation of detected lines. The metrics for lineevaluation are given in several nonuniform units. It useslength ratio, deviation, and count ratio to evaluate theline length detection, line location detection, and linequantity detection, respectively. There is lack of an over-all evaluation metric which provides an overall combinedperformance evaluation of the algorithm under consider-ation.
Wenyin and Dori [8] propose performance evaluationindices for straight and circular line detection. Detectionand false alarm rates are defined at both the pixel leveland the vector level. Use of pixel level performance in-dices (measures of shape preservation) is not completelyappropriate for real images that contain severe distor-tions such as warping and/or other defects introduced inthe hard copy drawing and/or defects generated by thescanning/imaging system. On such images, attempts toobtain a high pixel recovery index would unnecessarilyrequire the detected vectors to be true to the distortedshape of the imaged lines, thereby making the detectedlines fragmented. For such images, the pixel recovery in-dex needs to be assigned less weight than the vector re-covery index. However, there is no way to predeterminethe right relative weights for the pixel and vector recov-ery indices.
Phillips and Chhabra [5] present the task of evalua-tion from the opposite angle. They do not look at thecomplexity of the entities to be recognized. Instead, intheir view, the true measure of performance has to begoal directed. The goal of line drawing recognition is toconvert a paper copy or a raster image of a line draw-ing into a useful form (such as a vector CAD file). Howwell a graphics recognition system works should be mea-sured by how much manual effort is required to correct

R. Raveaux: Evaluation of Vectorized Documents 3
the mistakes made by the system, not by how well itrecognizes difficult shapes. The goal of the evaluation isto measure the cost of postprocessing operations thatare necessary to correct the vectorization mistakes. Ed-itCost is the cost estimate for human post-editing effortto clean-up the recognition result.
Based on this synthesis of performance evaluationsystems, one can observe that most of these methodsremain at a very low level of analysis of the informa-tion (vector level), while user requirements often con-cern high-level analysis. From the related work whichfocuses on low-level primitives (segments, arcs), we ex-tend the global concept of performance evaluation of vec-torized documents to polygon level. Herein, we presentour work, a recovery index which combines a local over-lapping metric at polygon level when data are closer tothe semantic level and a matching distance for evaluat-ing the polygonal approximation correctness in terms ofedit operations.
1.3 Our approach
[8] and [5] are well-suited tools to tackle the performanceevaluation problem of vectorized documents. However,to be more realistic and closer to objects handled by hu-mans, [8] and [5] also underlined the need to considermore complex structures or domain-specific objects intothe assessment process. For instance, in [5], Dr. Chhabrareported as a shortcoming that ”The detection of poly-lines, polygons, objects, symbols, etc. was not tested”.A step in this direction is to address the problem underthe prism of grouping of vectors. Unfortunately, prior al-gorithms cannot be easily modified to reach higher levelobjects since no match was attempted between solid en-tities. In fact, if in the case of low-level primitives thematching can be easily reduced to an overlapping cri-terion; for more complex elements the question is moreambitious. Due to fragmentation phenomena introducedby R2V tools, an entity of the ground-truth can possi-bly be related to many elements of the auto-vectorizedversion of the document. Solving this ambiguity requirescomplex matching algorithms that are not provided byprior works because the underlying problem does notexist at a low level of analysis. Rather than considerpolygon fragmentation and combination as being simplywrong, and only allow the best match with the maximumoverlap, we address the question in an optimal mannerto find best polygon assignments. As a consequence, toaddress the performance evaluation problem at polygonlevel, we need to provide a robust object matching. In ourour approach, this major phase is carried out by a com-binatorial framework to perform polygon assignments.Secondly, starting from the original idea of EditCostexplained by Phillips and Chhabra, the cost estimatefor human post-editing effort to clean-up the recogni-tion result, we propose the use of a graph matching. Thisparadigm provides more than a value in R, it reveals thesequence of corrections to be made to transform a set ofconnected line segments into another.
Through the reading of the literature, on the topic ofperformance evaluation of document image algorithms,we took into account comments and limitations of formerprotocols to detect five desired points:
1. To consider object fragmentation2. To provide indices in uniform units3. A generic and a domain-independent protocol4. An overall evaluation metric5. To evaluate how much manual effort is required to
correct mistakes made by the system
Our proposal fulfills these five points: (1) A polygon as-signment method and a graph matching algorithm tackleboth polygon and line fragmentation problems; (2) Ourtwo indices are bounded between 0 and 1; (3) No as-sumptions as to the kind of documents are made by ourprotocol, the only constraint is that the document mustcontain polygons; (4) An overall metric is provided bylinear combination of the two proposed indices; (5) TheEditCost representative of the manual labor to be madeto correct a document is envisaged through the graphmatching question in terms of basic edit operations (ad-dition, deletion, substitution). Furthermore, working atpolygon level offers many advantages. It makes the spot-ting of errors easier, there are much less polygons thanvectors in a drawing, so the visualization of mistakes ispretty fast. This point is very important for industrialsystems, since it permits to reduce the user correctiontime, by helping him to focus on errors directly. Fur-thermore, this facilitates the study of large samples ofdocuments and new error categorizations may arise. Ad-dressing the question from another point of view can helpdevelopers to improve and design R2V software.
We can’t solve problems by using the same kind
of thinking we used when we created them.
(Albert Einstein)
We propose here a novel and optimal object match-ing for polygon comparison from a viewpoint that differsfrom prior works. We consider the coherency of the doc-ument at a polygon level. Our polygonization evaluationis based on a polygon mapping constrained by the topo-logical information. While this measure appreciates thequality of the polygon overlapping, a cycle graph match-ing takes a closer look at a lower level of information:the segment layout within the polygons. In this way, weexpress the consistency of the drawing from a polygonpoint of view.
The smallest item that can be found in a engineeringdrawing is the segment.
Definition 1. (Segment) In geometry, a line segment isa part of a line that is bounded by two end points, andcontains every point on the line between its end points.
This object is considerably versatile, the number of linesegments present in a wire drawing can be significantlyimpacted by the vectorization algorithm due to the noisethat occurred in the original image of documents (Noisedue to storage conditions, digitization steps). On the op-posite, we decide to investigate a more consistent andreliable object called polygon.

4 R. Raveaux: Evaluation of Vectorized Documents
Definition 2. (Polygon) In geometry, a polygon is tra-ditionally a plane figure that is bounded by a closed pathor circuit, composed of a finite sequence of straight linesegments (i.e., by a closed polygonal chain). These seg-ments are called its edges or sides, and the points wheretwo edges meet are the polygon’s vertices or corners. Apolygon is a 2-dimensional example of the more generalpolytope in any number of dimensions.
The polygons are formed by running a cycle detectionalgorithm on the heap of segments that composed thedrawing. Invented in the late 1960s, Floyd’s cycle-findingalgorithm [25] is a pointer algorithm that uses only twopointers, which move through the sequence of points atdifferent speeds. This polygon layer is more reliable andso it provides a better foundation to build a dissimilar-ity measure on top of it. A conventional way of defin-ing measures of dissimilarity between complex objects(maps, drawing obtained by vectorization) is to basethe measure on the quantity of shared terms. Betweentwo complex objects o1 and o2, the aim is to find thematching coefficient mc, which is based on the numberof shared terms. The polygon organization of a docu-ment is a good viewpoint, more stable and less subjectto variations than the segment layer. In the mean time,it represents a complimentary view of the problem.
Polygonized elements issued from a raster to vec-tor conversion method are assigned and measured upto a manually vectorized Ground Truth. The assign-ment problem is one of the fundamental combinatorialoptimization problems in the branch of optimization oroperations research in mathematics. It consists of find-ing a maximum weight matching in a weighted bipartitegraph.
In its proposed form, the problem is as follows:
– Let DGT , DCG be a Ground Truth document and aComputer Generated document, respectively.
– There are |DCG| number of polygons in DCG and|DGT | number of polygons in DGT . Any polygons(PCG) from DCG can be assigned to any polygons(PCG) of DCG, while incurring some cost that mayvary depending on the PCG-PGT assignment. It isrequired to map all polygons by assigning exactly onePCG to each PGT in such a way that the total costof the assignment is minimized. This matching costis directly linked to the cost function that measuresthe similarity between polygons.
Our combinatorial framework cuts down the algorith-mic complexity to an O(n3) upper bound, depending onthe number of polygons in the largest drawing. Hence,the matching can be achieved in polynomial time whichtackles the computational barrier. We stand apart fromthe prior approaches by grouping low-level primitivesinto polygons and then considering their matching at thishigh-level point of view. Once polygons are mapped, it isinteresting to take a closer look at a lower level by check-ing out segment layouts within the mapped polygons.This presents some advantages as elements are locallyaffected to define a local dissimilarity measure which isvisually interesting; it makes easier the spotting of mis-detected areas. A complete data flow process for poly-
Fig. 1. Overview of the overall methodology. A bipartitegraph weighted by the symmetric difference, and cycle graphedit distance applied to mapped polygons
gonized document evaluation is proposed. Our contribu-tion in this domain is two-fold. Firstly, we compare aground truth document and a computer generated doc-ument thanks to an optimal framework that proceedswith object mapping. Finally, another operator providesestimates on the relation between the segments withintwo mapped polygons in terms of edit operations, bymeans of a cycle graph matching. Figure 1 depicts anoverview of our methodology.
1.4 Organization
The organization of the paper is as follows: Sect. 2.1 de-scribes theoretically and in terms of algorithm the poly-gon mapping method, Sect. 2.2 explains the cycle graphmatching process in order to assess the quality of thepolygonal approximation. Sect. 2.3 sets forth the type oferrors that are likely to occur in object retrieval systems.Sect. 3 describes the experimental protocol, this sectionalso explains how to interpret our new set of indices in aapplication to cadastral map evaluation. A summary isincluded in Sect. 4, followed by discussions and conclud-ing remarks.
2 A set of indices for polygonization evaluation
In this section, we define the two criteria involved inour proposal for a performance evaluation tool dedicatedto polygonization. In the first part, a polygon assign-ment method is described. It aims at taking into accountshape distortions caused by retrieval systems. Secondly,a matched edit distance is defined. This measure rep-resents the variations introduced when a given systemapproximates digital curves. It is a synthesis on vector-ization precision. Finally, mis-detection or over-detection

R. Raveaux: Evaluation of Vectorized Documents 5
errors due to raster to polygon conversion are introducedin a third part. This breakdown leads to the definitionof specific notations and error categorizations.
2.1 Polygon mapping using the Hungarian method
Once polygons are located within the vectorized docu-ment, it can be seen as a partition of polygons. Compar-ing two documents (D1, D2) comes down to matchingeach polygon of D1 with each polygon of D2. This assign-ment is performed using the Hungarian method which isformally described in the next part.
Algorithmic of the Hungarian methodOur approach for vectorized document comparison isbased on the assignment problem. The assignment prob-lem considers the task of finding an optimal assignmentof the elements of a set D1 to the elements of a set D2.Without loss of generality, we assume that |D1| ≥ |D2|.The complete bipartite graph Gpm = D1∪D2 ∪4, D1 ×(D2 ∪4), where 4 represents empty dummy polygons,is called the polygon matching of D1 and D2. A polygonmatching between D1 and D2 is defined as a maximalmatching in Gpm. We define the matching distance be-tween D1 and D2, denoted by PMD(D1, D2), as thecost of the minimum-weight polygon matching betweenD1 and D2 with respect to the cost function K. Thecost function is especially dedicated to our problem andis fully explained in section 2.1. This optimal polygonassignment induces a univalent vertex mapping betweenD1 and D2, such that the function PMD : D1 × (D2 ∪4) → R
+0 minimizes the cost of polygon matching. If
the numbers of polygons are not equal in both docu-ments, then empty ”dummy” polygons are added untilequality |D1| = |D2| is reached. The cost to match anempty ”dummy” polygon is equal to the cost of insertinga whole unmapped polygon (K(∅, P )). A shortcoming ofthe method is the one-to-one mapping aspect of the al-gorithm, however, this latter is performed at a high levelof perception where data are less likely to be fragmented.Finally, this disadvantage should not discourage the useof the PMD distance considering the important speed-upit provides while being optimal, deterministic and quiteaccurate. In addition, unmapped elements are not leftbehind, they are considered either as ”false alarm” or”false negative” according to the kind of mistakes theyinduced (see section 2.3).
Cost function for polygon assignmentsMunkres’ algorithm as introduced in the last section pro-vides us an optimal solution to the assignment problemin O(n3) time. In its generic form, the assignment prob-lem considers the task of finding an optimal assignmentof the elements of a set GT to the elements of a setCG assuming that numerical costs are given for eachassignment pair. In fact, a cost function does exist be-tween each pair of polygons to express numerically theirsimilarity, in the same way a ”zero” will represent two
identical polygons and ”one” two polygons not sharingany common features. The polygon overlay, inspired bythe theory of sets, measures the similarity between poly-gons. When polygons are compared into the same axissystem, the overlay takes into account spatial adjust-ment between polygons. The process of overlaying poly-gons shares common points with set theory. Let’s assumethat A and B are two sets, the intersection can be refor-mulated through the set theory. Intersection, where theresult includes all those set parts that occur in A and B.A way to compare them is to find out how A differs fromB (see figure 2): In mathematics, the difference of twosets is the set of elements which are in one of the sets,but not in both. This operation is the set-theoretic kin ofthe exclusive disjunction in Boolean logic. The symmet-ric difference of the sets A and B is commonly denotedby A∆B. The symmetric difference is equivalent to theunion of both relative complements, that is:
A∆B = (A \ B) ∪ (B \ A)
and it can also be expressed as the union of the two sets,minus their intersection:
A∆B = (A ∪ B) \ (B ∩ A) (1)
The symmetric difference is commutative and asso-ciative:
A∆B = B∆A
The empty set is neutral, and every set is its own inverse:
A∆∅ = A
A∆A = ∅
The set difference can be expressed as the union ofthe two sets, minus their intersection and represents thenumber of shared terms. In order to define measures ofdissimilarity between complex objects (sets, polygons,...),a suitable possibility is to settle the measure on the quan-tity of shared terms. Based on this paradigm, the sim-plest similarity measure between two complex objects o1
and o2 is the matching coefficient mc :
mc =o1 ∧ o2
o1 ∨ o2(2)
Where o1∧o2 denotes the intersection of o1,o2 and o1∨o2
stands for the union between the two objects.Derived from the equation 2, dissimilarity measures whichtake into account the maximal common shared terms(mcs) of two sets were put forward:
d(o1, o2) = 1 −mcs(o1, o2)
max(| o1 |, | o2 |)(3)
Where | o | denotes the size of o. From the equation 2,the expression o1 ∨ o2 is substituted by the size of thelargest object and the intersection of two objects (o1∧o2)is represented by the maximum common subset.

6 R. Raveaux: Evaluation of Vectorized Documents
Finally, to obtain a dissimilarity measure betweenpolygons, let us define a function K that induces a map-ping of P1 and P2 into R (K : P1×P2 → R) where P1and P2 are two polygons:
K(P1, P2) = 1 −mcs(P1, P2)
| P1 | + | P2 | −mcs(P1, P2)(4)
Where |P | denotes the area of the polygon P and wheremcs(P1, P2) is the largest set common to P1 and P2,i.e. it cannot be extended to another common set by theaddition of any element. Straightforwardly, the largestcommon subset between P1 and P2 can be seen as thearea in interception between P1 and P2. Consequently,equation 4 can be re-written as follows:
K(P1, P2) = 1 −|P1 ∩ P2|
|P1| + |P2| − |P1 ∩ P2|(5)
In a general way, the equation 3 has been proved to bea metric in [26] and [27]. As long as, |P1∩P2| is a validmaximum common shared terms for polygons, the metricproperties hold true for the equation 5.
Now, let us take a closer look at the basic propertiesof this dissimilarity measure :
K(P1, P2) >= 0 ∀P1, P2 (6)
K(P1, P2) = 0 → P1 = P2 (7)
K : [0; 1] (8)
Theoretical discussion on our dissimilarity measureTwo questions are addressed in this part, the first oneconcerns the unity of PMD when facing heterogeneousdocuments (different scales and orientations) and thesecond point is devoted to the proof of PMD as beinga metric. This point is crucial to demonstrate the abilityof providing a rank information which is representativeof the error level of a given document with respect to theentire collection.
The cost function behavior: One condition imposed bythe Hungarian method is that the cost function has tobe strictly positive or zero, this assumption is respected(see equation 6). In addition, the normalization betweenzero and one (see equation 5, equation 8) confers someinteresting aspects to the distance.
Without normalization, the distance is highly depen-dent on the polygon surfaces. A higher importance wouldbe given to large polygons and they could highly impactthe final score, while small polygons would not be treatedwith significance.
Hence, this measure considers with equity whetherthe concerned polygons are small or not. It means thatno bias will be introduced when facing large polygons.
Fig. 2. A∆B
Thereby, a highly over-segmented vectorization with manysmall areas will be roughly as bad as an under-segmentedvectorization with few large polygons. Finally, the nor-malization leads to a lower and an upper bound (equa-tion 8) of our distance which is useful to compare a docu-ment collection with different scales. In this way, PMD isdependent on scale, translation and rotation variations.Nevertheless, these are desired properties for a distancewhich is meant to represent the exactness between twopolygonized drawings.
The Polygon Matching Distance is a metric (PMD):
Proof. To show that our measure of similarity betweendocuments is a metric, we have to prove four propertiesfor this similarity measure.
– PMD(D1, D2) ≥ 0The polygon matching distance between two docu-ments is the sum of the cost for each polygon match-ing. As the cost function is non-negative, any sum ofcost values is also non-negative.
– PMD(D1, D2) = PMD(D2, D1)The minimum-weight maximal matching in a bipar-tite graph is symmetric, if the edges in the bipartitegraph are undirected. This is equivalent to the costfunction being symmetric. As the cost function is ametric, the cost for matching two polygons is sym-metric. Therefore, the polygon matching distance issymmetric.
– PMD(D1, D3) ≤ PMD(D1, D2) + PMD(D2, D3)As the cost function is a metric, the triangle inequal-ity holds for each triple of documents in D1, D2 andD3 and for those polygons that are mapped to anempty polygon. The polygon matching distance is thesum of the cost of the matching of individual poly-gons. Therefore, the triangle inequality also holds forthe polygon matching distance.
– PMD(D1, D2) = 0 ⇒ D1 = D2
If one of the polygons of D1 cannot be matched ex-actly with a polygon of D2 then PMD(D1, D2) > 0.A straightforward interpretation of this fact leads tothe uniqueness property. Where all D1’ polygons arematched with a cost of zero to the polygons of M2,it implies D1 = D2.
2.2 Matched edit distance for polygon comparison
The Hungarian method provides a formal framework toperform a one to one mapping between polygons. Eachmapped pair of polygons minimizes its symmetric differ-ence providing a topological information. However, this

R. Raveaux: Evaluation of Vectorized Documents 7
(a) Polygon (b) Cycle Graph
Fig. 3. From polygon to cycle graph
measure does not take into account the labor work thathas to be done to change a polygon from the CG to acorrect polygon from the GT. In order to compensatethis weakness, we decide to include an additional mea-sure which reveals how many edit operations have to bedone to change a polygon into another according to somebasic operations. That’s why we present an edit distancefor polygon comparison. From definition 2 and figure 3, aclear link exists between a polygon and its representationby a cycle graph. The next part defines a Cycle GraphEdit Distance (CGED) for polygon comparison, this lat-ter deals with the graph matching problem applied cyclegraph.
A Cycle Graph Matching Distance for Polygon Compar-isonVisually, two chains of segments are similar if the lengthattributes and angles between consecutive segments canbe aligned. In the literature on polygonal shape recog-nition, most approaches base the distance definition be-tween two polygonal shapes on length and angle differ-ences. For example, Arkin et al. used in [28] the turn-ing function which gives the angle between the counter-clockwise tangent and the x-axis as a function of thearc length. Their results are in accordance with the in-tuitive notion of shape similarity. More recently, in [29],Llados et al. represented regions by polylines and stringmatching techniques are used to measure their similar-ity. The algorithm follows a branch and bound approachdriven by the RAG edit operations. This formulationallows matching computing under distorted inputs. Thealgorithm has been used for recognizing symbols in handdrawn diagrams.
Polygonal shapes require to characterize the segments(their length) but also their relationships by the angleinformation.
The graph-based representation was preferred to stringrepresentation. In fact, the protocol is designed for poly-gons but may also be extended to other line shapes, forinstance this could be made by completing the graphrepresentation to connected vectors instead of searchingfor cyclic polygons. In this way, the graph-based view-point could be the container of a wider range of entities.
It leaves the door open to a more global paradigm, theobject matching question.
The concept of edit distance has been extended fromstrings to trees and to graphs [30], [31]. Similarly tostring edit distance, the key idea of graph edit distanceis to define the dissimilarity, or distance, of graphs bythe minimum amount of distortion that is needed totransform one graph into another. Compared to otherapproaches to graph matching, graph edit distance isknown to be very flexible since it can handle arbitrarygraphs and any type of node and edge labels. Further-more, by defining costs for edit operations, the conceptof edit distance can be tailored to specific applications.A standard set of distortion operations is given by in-sertions, deletions, and substitutions of both nodes andedges. We denote the substitution of two nodes u andv by (u → v), the deletion of node u by(u → λ), andthe insertion of node v by (λ → v). For edges we use asimilar notation.
Given two graphs, the source graph G1 and the targetgraph G2, the idea of graph edit distance is to deletesome nodes and edges from G1, relabel (substitute) someof the remaining nodes and edges, and insert some nodesand edges in G2, such that G1 is finally transformed intoG2.
A sequence of edit operations e1; ...; ek that trans-forms G1 completely into G2 is called an edit path be-tween G1and G2. Obviously, for every pair of graphs(G1; G2), there exist a number of different edit pathstransforming G1 into G2. To find the most suitable editpath, one introduces a cost for each edit operation, mea-suring the strength of the corresponding operation. Theidea of such a cost function is to define whether or notan edit operation represents a strong modification of thegraph. Obviously, the cost function is defined with re-spect to the underlying node or edge labels. Clearly, be-tween two similar graphs, there should exist an inexpen-sive edit path, representing low cost operations, while fordissimilar graphs an edit path with high costs is needed.Consequently, the edit distance of two graphs is definedby the minimum cost edit path between two graphs. Thecomputation of the edit distance is carried out by meansof a tree search algorithm which explores the space ofall possible mappings of the nodes and edges of the firstgraph to the nodes and edges of the second graph.
Definition 3. (Cycle Graph Matching)In this work, the problem which is considered con-
cerns the matching of cycle directed labeled graphs. Suchgraphs can be defined as follows: Let LV and LE denotethe set of node and edge labels, respectively. A labeledgraph G is a 4-tuple G = (V, E, µ, ξ) , where
– V is the set of nodes,– E ⊆ V × V is the set of edges– µ : V → LV is a function assigning labels to the
nodes, and– ξ : E → LE is a function assigning labels to the edges.– |V |=|E|
Now, let us define a function CGED based on theCycle Graph Edit Distance that induces a mapping of

8 R. Raveaux: Evaluation of Vectorized Documents
Table 1. Edit costs
Node Edge
LabelSubstitu-tion
γ((lAi ) → (lBj )) =
∣
∣
∣
∣
∣
∣
lAi|A|
−lBj|B|
∣
∣
∣
∣
∣
∣
γ((ΦAi ) → (ΦB
j )) =|ΦA
i −ΦBj |
360
Addition γ(λ → (lBj )) =lBj|B|
γ(λ → (ΦBj )) =
|ΦBj |
360
Deletion γ((lAi ) → λ) =lAi|A|
γ((ΦAi ) → λ) =
|ΦAi |
360
G1 and G2 into R (CGED : G1 × G2 7→ R) :
CGED(G1, G2) = min(e1,..,ek)∈γ(G1,G2)
k∑
i=1
(edit(ei))
Where γ(G1, G2) denotes the set of edit paths transform-ing G1 into G2, and edit denotes the cost function mea-suring the strength edit(ei) of edit operation ei
.
A Cycle Graph is a cycle which visits each vertex ex-actly once and also returns to the starting vertex. As aconsequence, the set of all edit paths is considerably re-duced and the Cycle Graph matching can be solved inO(nm log m) time.
In order to use cycle graph matching for polygon ac-curacy evaluation, we use an attributed graph represen-tation. Starting from a polygonal approximation of theshape, a graph is built. We use the segments as prim-itives, encoding them with a set of nodes. Each nodeis labeled with a real number li, where li denotes thelength of the segment si. Then, edges are built using thefollowing rule: two nodes are linked with a directed andattributed edge if two constitutive segments share a com-mon point. Each edge is labeled with a real number Φi
that denotes the angle between si and si−1 in the coun-terclockwise direction. We can appreciate an example ofhow these attributes are computed for a sample shapein figure 3.
Let A and B be two chains of adjacent segments,represented as cycle graphs, with total lengths |A| = nand |B| = m and with respectively attributed cycle graphrepresentations:
GA = (V A, EA) = (lAi ...lAn ), (ΦAi ...ΦA
n )
and,
GB = (V B, EB) = (lBi ...lBm), (ΦBi ...ΦB
m)
The cost functions for attributed cycle graph match-ing are reported in table 1
Interpretation of the edit operationsThere are the proposed cost functions inspired by theones designed by Tsay and Tsai in [32] where they usestring matching for shape recognition.
The operation attributes decrease the edit costs forprimitives undergoing noisy transformations, as the in-herent segment fragmentation from the raster-to-vector
process. And it aims to compare polygons with differ-ent number of segments making the system tolerant tosegment cardinality.
Furthermore, our edition functions can describe realtransformations applied to polygons. When editing avectorization, basic operations are: Remove, Add or Movea segment; a visual illustration of theses operations isgiven in figure 4. Through the linear combination of thecost functions, it is possible to recreate the usages of aperson modifying a vectorization, and the definitions be-low present the combinations to obtain different polygontransformations. Conceptually, we are here very close tothe ideas proposed by Chhabra [5].
Reasoning in a segment deletion context, we proceedby two simple case analysis to detail the elaboration ofthe generated operation sequence and then to describethe impact of the involved cost functions.
Case 1. Edit operation for segment deletionAt first, deleting a segment comes with the deletions ofa node and an edge into the graph representation.We conclude that
deletions = γ((lAi ) → λ) + γ((ΦAi ) → λ)
In addition, the deletions of a node and an edge in a cyclegraph creates an orphan edge that must be reconnected.To take into account this modification, an edge labelsubstitution is operated.Consequently we conclude:
substitution = γ((ΦAi ) → (ΦB
j ))
Finally, the sequence of operations is:
γ(si → λ) = deletions + substitution
Plainly, we change the formal expressions by their cor-responding costs to obtain the following formula:
γ(si → λ) =lAi|A|
+ΦA
i
360+
|ΦAi − ΦB
j |
360
Case 2. Cost function for a segment deletionA segment deletion is operated to remove a segment er-roneously inserted by a given R2V system. We can showthat the cost function associated to the edit operationγ(si → λ) is representative of the mistake importance.We proceed by a simple case analysis. The global costfunction is impacted by two parameters, the size and themisalignment of the removed segment. γ(si → λ) ex-presses two deformations: (i) How large was the segmentto be removed and (ii) How misaligned was the segmentto be removed compared with the adjacency vectors. Inthis way, larger is the segment to be removed and biggeris the mistake made by the R2V. The cost function re-sponds correctly, larger is the segment and bigger is the
quantity γ(si → λ) by the increase of thelAi|A| factor. The
second kind of errors generated by R2V systems is thesegment misalignment. Larger is the angle variations ofthe removed segment with the adjacency segments in thepolygon and bigger is the committed error. Accordingly,

R. Raveaux: Evaluation of Vectorized Documents 9
(a) Original (b) Add
(c) Delete (d) Move
Fig. 4. Basic edit operations applied to a polygon.
larger is the angle variations of the removed segmentand bigger is the quantity γ(si → λ) by the increase ofΦA
i
360 +|ΦA
i −ΦBj |
360 combination.
Thereby, we provide the definitions for segment dele-tion, addition and move.
Definition 4. Segment deletion transformation
γ(si → λ) = γ((lAi ) → λ)+γ((ΦAi ) → λ)+γ((ΦA
i ) → (ΦBj ))
γ(si → λ) =lAi|A|
+ΦA
i
360+
|ΦAi − ΦB
j |
360
Definition 5. Segment addition transformation
γ(λ → sj) = γ(λ → (lAj ))+γ(λ → (ΦAj ))+γ((ΦA
i ) → (ΦBj ))
γ(λ → sj) =lAj|A|
+ΦA
j
360+
|ΦAi − ΦB
j |
360
Definition 6. Segment move transformation
γ(si) → (sj) = γ((lAi ) → (lBj )) + γ((ΦAi ) → (ΦB
j ))
γ(si) → (sj) =
∣
∣
∣
∣
∣
lAi|A|
−lBj|B|
∣
∣
∣
∣
∣
+|ΦA
i − ΦBj |
360
Matched Edit DistanceTo complete the process, the Cycle Graph Matching Dis-tance (CGED) has to be performed on every pair ofmapped polygons found by the Hungarian methods whenit is based on the symmetric difference. Note that if onepolygon is associated to an empty dummy item then thecycle graph matching distance will be only composed ofaddition operations. The Matched Edit Distance(MED)is then composed of the sum of all CGED(G1, G2) com-puted on every pair of graphs extracted from the poly-gons.
MED(D1, D2) =
max (|(D1|,|D2|)∑
i=1
CGED(GD1
i , GD2
i )
max (|(D1|, |D2|)
2.3 Types of error and notations
Here, we sum up a set of two criteria which will help us toevaluate a given raster to vector conversion. Each mea-sure is a viewpoint on the vectorization process. How-ever, every criterion can still be divided into two cate-gories according to the nature of the error it expresses.Hence, the next part defines the different kinds of er-rors that can occur when dealing with object retrievalsystems.
Types of error
– Type I error, also known as an ”error of the firstkind”, a false alarm or a ”false positive”: the error ofrejecting a null hypothesis when it is actually true.Plainly speaking, it occurs when we are detecting apolygon when in truth there is none, thus indicatinga test of poor specificity. An example of this wouldbe if an application should retrieve a polygon whenin reality there is none. Type I error can be viewedas the error of excessive credulity.
– Type II error, also known as an ”error of the secondkind”, a ”false negative”: the error of failing to rejecta null hypothesis when it is in fact not true. In otherwords, this is the error of failing to detect a polygonwhen in truth there is one, thus indicating a test ofpoor sensitivity. An example of this would be if a testshould show that there is no polygon when in realitythere is one. Type II error can be viewed as the errorof excessive skepticism.
NotationsFor the understanding of these tests, we first introducenotations that will make the reading much simpler. Adissimilarity measure between vectorized documents is afunction :
d : X × X → R
where X is a vectorized document. We report in table2, the notations derived from this general form.
Xtp puts forward the cost involved when matching apair of mapped polygons. This is a synonym of accuracy,it denotes how well suited is the detected polygon fromthe DCG. Xfp takes the stock of the over-detections is-sued from the raster to vector conversion step. On theother hand, Xfn represents the mis-detections, it oc-curs when the software used to vectorize has a strictpolicy of rejection which leads to an under-detection ofobjects. For clarity reasons, when no precision is spec-ified, X refers to Xall. Finally, a desirable informationis the number of false alarms, false negative and truepositive polygons retrieved by the retro-conversion sys-tem. These values are normalized as follows to obtain acomparable rate between documents.
ηfn =] of mis-detected polygons
max (|(D1|, |D2|)
ηfp =] of over-detected polygons
max (|(D1|, |D2|)

10 R. Raveaux: Evaluation of Vectorized Documents
Notation Method Type of error Distance
PMDtp PMD True Positive symmetricdifference
PMDfn PMD False Negative symmetricdifference
PMDfp PMD False Positive symmetricdifference
PMDmd PMD Mis-detection (fn+fp) symmetricdifference
PMDall PMD (tp+fn+fp) symmetricdifference
MEDtp MED True Positive CycleGraphMatching
MEDfn MED False Negative CycleGraphMatching
MEDfp MED False Positive CycleGraphMatching
MEDmd MED Mis-Detection (fn+fp) CycleGraphMatching
MEDall MED (tp+fn+fp) CycleGraphMatching
ηtp - True Positive ] of well-detectedpolygons
ηfp - False Positive ] of over-detectedpolygons
ηfn - False Negative ] of under-detectedpolygons
Table 2. Distance between vectorized documents.
3 Experiments
This section is devoted to the experimental evaluationof the proposed approach. Firstly, we describe databasesthat are used to benchmark our measures. Then the pro-tocol of our experiments is defined by enumerating thekind of assessments we performed. The two first tests arededicated to graphical symbols from GREC contests. Onthis basis, we aim at illustrating the ability of PolygonMatching Distance (PMD) and Matched Edit Distance(MED) of being representative of polygon deformations(shape variation and polygonal approximation modifi-cation, respectively). The last evaluation concerns thecadastral map subject, we show results on a large collec-tion of maps. We provide guidelines to understand themeaning of our set of indices. In this pedagogic objective,a visualization of detection errors is proposed.
In this practical work, methods were implementedin Java 1.5 and run on a 2.14GHz computer with 2GRAM. Both databases and performance evaluation toolsare freely available on this web site:
http://alpage-l3i.univ-lr.fr/
Both datasets and the experimental protocol are firstlydescribed before investigating and discussing the meritsof the proposed approach.
Table 3. Characteristics of the cadastral map collection:Base C
] of polygons ] of vectors
|GT | 2335 654017|CG| 2626 850667
mean |GT | 23.35 64.75mean |CG| 26.26 85.06max |GT | 83 101max |CG| 69 100
Table 4. Characteristics of the symbols data sets: Base A,B
Base A Base BNumber of classes (N) 70 53
| Base | 350 371Noise type Vectorial BinaryNoise levels 4 6
Assessment purpose Shape distortion Digital curveapproxima-tion
Fig. 5. A sample among the seventy symbols used in ourranking test. Polygon-less symbols were removed.
3.1 Databases in use
In recent years the subject of performance evaluationhas gained popularity in pattern recognition and ma-chine learning. In the graphics recognition community, ahuge amount of efforts was made to elaborate standardand publicly available data sets. Especially, E. Valveny[33],[34] and M. Delalandre [35] published on-line sym-bol datasets for a symbol classification purpose. In thissection, we describe two databases derived from [34] and[35] and we also present a cadastral map collection. Thecontent of each database is summarized in tables 3, 4.
Base A: Shape distortion. The paper presentedin [35] gave birth to a publicly available database ofsymbols1. From this setting, we removed all polygon-lesssymbols to fit our purpose which was to evaluate polygondetection methods. Hence, we selected 70 symbols fromthe GREC’05 contest [36] and a sample is presented infigure 5.
1 http : / / mathieu. delalandre.free.fr /projects /sesyd/sketches.html

R. Raveaux: Evaluation of Vectorized Documents 11
On perfect symbols, a vectorial noise is applied togenerate a collection of degraded elements. We could notafford to use real data because of the difficulty of collect-ing images with all kinds of transformations and noise.Besides, it is not easy to quantify the degree of noise in areal image. Then, it is not possible to define a ranking ofdifficulty of images according to the degree of noise. Inour experiments, we have re-used methods for the gen-eration of shape transformation (based on active shapemodels [33]).
Vectorial Distortion: The goal of vectorial distortion isto deform the ideal shape of a symbol in order to sim-ulate the shape variability produced by hand-drawing.The method for the generation of vectorial distortions ofa symbol is based on the Active Shape Models [37]. Thismodel aims to build a model of the shape, statisticallycapturing the variability of a set of annotated trainingsamples. In order to be able to apply this method, weneed to generate a good set of training samples. This isnot a straightforward task due to the statistical natureof the method. The number of samples must be highenough, and the samples must reflect the usual kind ofvariations produced by hand-drawing. However, it is dif-ficult to have a great number of hand-drawn samplesof each symbol. To be really significant, these samplesshould be drawn by many different people. Thus, thedecision of generating automatically the set of sampleshas arisen. Based on the generation of deformed samplesthrough the random modification of a different numberof vertices of the symbol each time [38].
Each sample is represented using the model describedin [39], which permits easy generation of deformed shapes.Each symbol is described as a set of straight lines, andeach line is defined by four parameters: coordinates ofmid-point, orientation and length. Thus, each deformedsample can be seen as a point xi in a 4n dimensionalspace, where n is the number of lines of the symbol.Then, principal component analysis (PCA) can be usedto capture the variability in the sample set. Given a setof samples of a symbol, we can compute the mean x andthe covariance matrix S. The main modes of variationare described by the first eigenvectors pk of the covari-ance matrix S. The variance explained by each eigenvec-tor is equal to its corresponding eigenvalue. Thus, eachshape in the training set can be approximated using themean shape and a weighted sum of the eigenvectors:
x = x + Pb
where P = p1, ..., pm is the matrix of the first m eigenvec-tors and b is a vector of weights. This way, new imagesof a symbol can be generated by randomly selecting avector of weights b. Increasing values of bi will result inincreasing levels of distortion (see figure 6).
The model of vectorial distortion described in theformer paragraph has been applied with four increasinglevels of distortion to generate 280 (70*4) images of sym-bols. The variance was tuned from 0.00025 to 0.00100 bystep of 0.00025. This way of changing the variance is co-herent with the protocol presented in [35]. The entire
Fig. 6. Examples of increasing levels of vectorial distortion
database is then made up of 350 elements, 280 degradedsymbols and 70 models. The shape distortion generator,3gT system was provided by M. Delalandre2. 3gT ”gen-eration of graphical ground Truth” is a system to gener-ate random graphical documents (exported into SVG) oflow-level primitives (vectors, circles, ...) with their cor-responding ground truth. Base A is a reliable source toevaluate the shape distortion sensitivity of our polygonlocation measure. Numerical details concerning this dataset are presented in table 4.
Base B: Binary degradation. First of all, we decidedto use the data set provided by the GREC’03 contest.Mainly two application domains, architecture and elec-tronics, were adopted as a representative sample of awide range of shapes. GREC’03 database is originallyconstituted of 59 symbols from which we removed sym-bols without polygons. This pruning step led us to adatabase of 53 symbols. From the 9 noise levels avail-able, we only focused on the 6 first levels. Consequently,database B is made up of 318 (6*53) binary degradedsymbols plus 53 ideal models, i.e. a total of 371 polygo-nized elements according to the process explained in thenext paragraph.
Binary Degradation: Kanungo et al. have proposed amethod to introduce some noise on bitmap images [40].The purpose of this method is to modelize noises ob-tained by operations like printing, photocopying, or scan-ning processes. The problem is approached from a sta-tistical point of view. The core principle of this methodis to flip black and white pixels by considering, for eachcandidate pixel, the distance between it and the closestinverse region. The degradation method is validated us-ing a statistical methodology. Its flexibility in the choiceof the parameters requires some adaptations. Indeed, alarge set of degradations can be obtained. The methoditself accepts no less than 6 parameters, allowing to tunethe strength of white and black noise, the size of the in-fluence area of these noises, a global noise (which doesnot depend of the presence of white/black pixels), and apost-processing closing based on well-known morpholog-ical operators. Of course, these 6 parameters may gener-ate a large number of combinations, and thus, of modelsof degradation. So, if the core method used for the degra-dation tests is formal and validated for its correctness,the determination of the set of parameters used for thecontest is more empirical. This framework was appliedto the organization of the GREC’03 contest on symbolrecognition. In [34], authors attempted to reproduce aset of degradations representing some realistic artifacts
2 http://mathieu.delalandre.free.fr/projects/3gT.html

12 R. Raveaux: Evaluation of Vectorized Documents
Fig. 7. Samples of some degraded images generated usingthe Kanungo method for each level of degradation used.
(to simulate noise produced when printing, photocopy-ing and scanning). Six levels of degradation (see figure7) were determined by [34]. They took care to representsome standard noises: local, global troubles.
Binary degradation impacts on polygonal approxima-tions: The higher is the noise level the higher are thedistortions on the polygonal approximation. The noiselevel has a direct influence on the vectorization algo-rithm. In this experiment, we used a standard data flowprocess to polygonize the symbols: (i) Cleaning3; (ii)Skeletonization; (iii) Polygonal approximation and (iv)Polygonizer. Arbitrarily, we adopted the well-known diBaja’s skeletonizer [41] and the Wall and Danielsson’svectorization [42]. Then a polygonizer was applied totransform the set of segments into polygons. These stepsare summed up in figure 8. A piece of polygon is zoomed-in to show the perturbation applied on the polygonalapproximation when noise increases. The method onlyrequires a single threshold i.e., the ratio between the al-gebraic surface and the length of the segments whichmakes this linear time algorithm fast and efficient. Thisparameter is set to 60 pixels for all the experiments. Wedid not want to assess the impact of the approximationthreshold but rather the impact of noise on polygoniza-tion when the threshold is frozen.
More information concerning those data is detailedin table 4.
Base C: Cadastral map collection. In the con-text of a project called ALPAGE, a closer look is givento ancient French cadastral maps related to the Parisianurban space during the 19th century (figure 9). Hence,the map collection is made up of 1100 images comingfrom the digitalization of Atlas books. On each map,domain-objects called Parcels are drawn by using color
3 A simple 5x5 median filter
Fig. 8. Example of the polygonal approximation when in-creasing the noise level.
Fig. 9. Example of cadastral map (7616 x 4895 Pixels, 200dpi, 24 BitsPerPixel)
to distinguish between them. From a computer scienceperspective, the challenge consists in the extraction of in-formation from color documents with the aim of provid-ing a vector layer to be inserted in a GIS (GeographicalInformation System).
Automatic polygon detection: In this project, a bottom-up strategy is adopted. In bottom-up strategies, algo-rithms are performed in a fixed sequence, usually start-ing low-level analysis of the gray level or black and whiteimage, from which primitives are extracted. From thisstarting point, the four stages for extracting parcels froma cadastral map are put forward. (i) At first, a color gra-dient is performed to locate objects within the image. (ii)Then, a text/graphic segmentation is run on the gradi-ent image to preserve only graphic elements [43], [44].(iii) Thirdly, a digital curve approximation is performedto transform pixels into vectors [45]. (iv) finally, vectors

R. Raveaux: Evaluation of Vectorized Documents 13
are gathered to form polgyons using a polygonizer algo-rithm [46]. The parcel extractor is evaluated using ourset of indices.
Ground-Truthing: With the help of experts in severalfields of sciences such as Historians, Archaeologists andGeographers, a campaign of handmade vectorization wascarried out. This work was intensively labor consumingyet necessary. It was the only way to give us the oppor-tunity to fully evaluate the accuracy of our work. Themain goal was to build a reference database to investigatethe merit of our parcel retrieval scheme. Manually, 100raster maps were carefully and precisely vectorized toconstitute a reliable collection of 2335 parcels of lands.These units are encoded as polygons according to thedefinition 2. Thereby, a real link does exist between aparcel and its polygon representation. This labor inten-sive procedure represents a real reference to measure upthe accuracy and the validity of our automatic vectoriza-tion [44], [47]. The content of the database is summarizedin table 3. In average, there are 25 parcels per map andthis accounts for about 75 line segments per parcel. Theground-truth was manually made according to simplerules. Each parcel had to be described by a polygon. Themedian line was favored in the line tracking phase. Theprecision question was solved by imposing to fit at bestthe parcel contour and consequently, in each polygon,a vertex corresponds to a significant direction change.For each image of document, there exists exactly onepair of vectorized maps, one map called Ground Truthand one map named Computer Generated, respectively< DGT ; DCG >. An example of a pair of vectorizationto be matched is displayed in figure 10. Further detailson this data set are presented in table 3. Note that thisdatabase is made up of real data.
A synthesis about this database is reported in table3 while the content is publicly available at
http://alpage-l3i.univ-lr.fr/PE/alpagedb.zip.
3.2 Protocol
Three different ways of evaluating our indices are pro-posed.
Polygon Matching Distance evaluation: To assess theability of the polygon mapping distance to increase whendocuments get badly reconstituted, we focus on Base A.Base A is representative of different shape distortionsand consequently, polygon shapes are affected by thisnoise. On Base A, we performed a ranking test usingPMD as a dissimilarity measure. A visual explanation ofhow ranks are obtained is brought to view in figure 11.Then, ranks are compared thanks to a statistical methodcalled a Kendall’s test and defined as follows:
Definition 7. Kendall’s testWe assess the correlation concerning the responses
to k-NN queries when using PMD as dissimilarity mea-sures. The setting is the following: in a given Base X, we
(a) GT
(b) CG
Fig. 10. Two vectorizations to be mapped (|DCG| = 46|DGT | = 40).
Fig. 11. Ranking explanation. Ranks 3 and 1 were swappedby PMD
select a number N of symbols, that are used to query bysimilarity the rest of the dataset. Top k responses to eachquery obtained using PMD are compared with the ground-truth. The ground-truth ranks are obtained thanks to thecontrol of noise level. The similarity of the PMD ranksand the ground-truth ranks is measured using Kendallcorrelation coefficient. We consider a null hypothesis ofindependence(H0) between the two responses and then,we compute, by means of a two-sided statistical hypoth-esis test, the probability (p-value) of getting a value ofthe statistic as extreme or more extreme than observedby chance alone, if H0 is true. The Kendall’s rank cor-relation measures the strength of monotonic associationbetween the vectors x and y (x and y may represent ranksor ordered categorical variables). Kendall’s rank correla-

14 R. Raveaux: Evaluation of Vectorized Documents
tion coefficient τ may be expressed as
τ =S
D
Where,
S =∑
i<j
(sign(x[j] − y[i]).sign(y[i]− x[j])) (9)
And,
D =k(k − 1)
2(10)
Polygonal approximation sensitivity: In this second ex-periment, we aim at assessing the capacity of the MatchedEdit Distance (MED) to increase when the polygonalapproximation gets badly reconstituted by the retrievalsystems. Base B is involved in this test. Base B is a bi-nary degraded set of symbols and the higher is the noiselevel on symbols and the more disturbed is the polygo-nal approximation from the original one. In this way, wecontrol the distortion level of the digital curve approxi-mation and consequently, we obtain a ground-truth or-der from an ideal symbol by controlling the noise level,in figure 8. Finally, the ranks returned by MED and theground-truth are compared according to the Kendall’stest described in Def.7. using a Kendall test.
Application to the evaluation of parcel detection: Ourlast experiments are based on real data that composedBase C. At first, we performed the PMD distance on asingle pair of given maps and this in order to highlightdissimilarities issued from the raster to vector conver-sion. Then, an experiment was dedicated to the evalua-tion of the entire collection of cadastral maps. We pro-vided an interpretation of the results through the view-points of our set of indices. Finally, a statistical frame-work was described to figure out relations between thedifferent indices.
3.3 Polygon Matching Distance evaluation
Using N = 70, k = 4 equal to the number of noise levelsavailable in Base A, we present in figure 12 and table5, the results obtained in terms of τ values. From the70 tests, only 9 have a p-value greater than 0.05, so wecan say that the hypothesis H0 of independence can berejected in 87.4% cases, with a risk of 5%. The observedcorrelation between the responses to k-NN queries whenusing the ground-truth and Polygon Matching Distance(PMD) tends to reveal a rank relation between both(median value of τ = 0.800). By stress testing a givensystem, we aim at demonstrating that our protocol canreveal strengths and weaknesses of a system. The PMDindex increases when image degradation increases.
Fig. 12. Base A: Kendal correlation. Histogram of τ valuesobtained comparing ground-truth and PMD ranks.
Min. 1st Qu. Median Mean 3rd Qu. Max.τ 0.0000 0.6000 0.8000 0.7029 0.8000 1.0000
Table 5. Summary of Kendall correlation (τ ). PMD vsground-truth
Min. 1st Qu. Median Mean 3rd Qu. Max.τ 0.3333 0.6190 0.7143 0.7107 0.8095 1.0000
Table 6. Summary of Kendall correlation (τ ). MED vsground-truth
3.4 Polygonal approximation sensitivity
Using N = 53, k = 6 equal to the number of noise levelsin Base A, we present in figure 13 and table 6, the resultsobtained in terms of τ values. From these results, we re-ject the null hypothesis of mutual independence betweenMED and the ground-truth rankings for the students.With a two-sided test we are considering the possibil-ity of concordance or discordance (akin to positive ornegative correlation). A one-sided test would have beenrestricted to either discordance or concordance, whichwould be an unusual assumption. In our experiment, wecan conclude that there is a statistically significant lackof independence between MED and the ground-truthrankings of the symbols by MED. MED tended to ranksymbols with apparently greater noise as being fartherfrom the ideal symbol than those with apparently lessnoise and vice versa.
3.5 Application to the evaluation of parcel detection
A visual dissimilarity measure of local anomalies: Inthis part, we focus on comparing maps two by two. This

R. Raveaux: Evaluation of Vectorized Documents 15
Fig. 13. Base B: Kendal correlation. Histogram of τ valuesobtained comparing ground-truth and MED ranks.
Xall Xtp Xfp
PMD 0.1856 0.0552 0.1304MED 0.5068 0.3764 0.1304
η 1 0.8695 0.1304
Table 7. Measures of performance.
difficult task requires a good observation of the local dif-ferences between the compared documents. On a ran-domly picked pair < DGT ; DCG >, we computed thePolygon Matching Distance (PMDall). A bi-dimensionalrepresentation of the costs to assign each element fromthe DCG to the DGT is displayed in figure 14, whereasvalues of the different measures are reported in table 7.Figure 14 provides a visual understanding of where theanomalies are located. Firstly, it facilitates the spottingof errors and other aberrations and especially, this frame-work can help domain experts understanding the limitsand advantages of a vectorization software. Figure 14 isworth a thousand words, it makes easier the communica-tion and the implementation of mutualized working toolsfor both Information and Communication Technologies(ICT) - Humanities and Social Sciences (HSS) commu-nities.
To conclude, it can help users to spot where the mis-takes are located and so save them a lot of time (timesaver). It can help software designers to locate easilywhere the R2V conversion failed and consequently, thislocal visualization at a polygon level facilitates the cat-egorization of detection errors.
Evaluation of a collection of maps: From the data setof vectorized maps, we attempted to evaluate the qualityof the overall conversion process through the viewpoints
Fig. 14. Local dissimilarities between the two maps. Thelighter the better. It means the darker is a parcel, the worst isits assignment. The overall cost=0.1856 can be broken downinto a mis-detection cost, PMDfp=0.1304 and a true positivecost PMDtp=0.0552
offered by the two main criteria that we have described,PMD, MED.
Over the map collection, we observed in figure 15an over-detection tendency. In average, 31% of the re-trieved polygons are misleading. 71% of these wrongpolygons are concerned by an over-detection behavior(ηfp = 0.22).
Now, we want to figure out the nature of the mis-takes, if these over-detected polygons are just some tinypolygons due to noise in the raster or if they represent amajor information altered during the process of conver-sion. To this aim, we pay attention to figure 16. Figure 16shows that only 36% of the overall cost PMDall is dueto the well-detected polygons, hence, most of the infor-mation is accurately retrieved from the rasters and theretrieved polygons do fit precisely the Ground-Truth. Onthe opposite 64% of the mistakes are attributable to thewrongly detected polygons. Figure 16 strengthens theidea that anomalies are caused by the over-acceptationpolicy of the automatic application.
In another step, we aim at assessing how much man-ual work has to be made to correct the automaticallyvectorized polygons. A fact observed from figure 17 isthat 54% of the MEDall mistakes are caused by theoperations to be made when correcting the polygonsMEDtp. A non-negligible part of the errors are causedby the corrections to be made to fit in the ground truth.An explanation could be a fragmentation phenomenon;many noisy strokes are broken into small pieces duringthe polygonal approximation process.
The rest of the errors, that is to say the MEDmd
values, is mainly due to an intensive use of the deletionoperator in order to remove the over-detected polygons.
Finally, based on a common work with the historiansHelene Noizet and Laurent Costa4, an algorithm witha combined index (PMDall + MEDall) of 0.70 or lessmay be considered good with respect to human vision
4 Members of LAboratoire de Medievistique Occidentale deParis (LAMOP). UMR 8589 CNRS / UNIVERSITE PARIS1 Pantheon Sorbonne

16 R. Raveaux: Evaluation of Vectorized Documents
(a) ηmd
(b) ηfn (c) ηfp
Fig. 15. Histogram of η. The mean value ηmd = 0.31 and itcan be broken down in two parts, ηfp = 0.22 and ηfn = 0.09.
evaluation. However, more work should make use of thisprotocol on a series of algorithms and degraded drawingsto obtain an objective assessment on commonly acceptedcriteria.
Inter-indices correlation: A correlation matrix is builtfrom the data series of indices (illustrated in figure 18(c)),the Pearson correlation is 1 in the case of an increasinglinear relationship, -1 in the case of a decreasing linearrelationship, and some value between -1 and 1 in all othercases, indicating the degree of linear dependence betweenthe variables. The closer the coefficient is to either -1or 1, the stronger the correlation between the variables.This matrix aims to compare the different quality mea-sures between them. A matrix is not expressive enough,so, a 256 shades of grey image is generated to express itssubstantial meaning in a 2D representation, called imageof correlations (figure 18(b)). In addition, the matrix ofscatterplots between the different measures of quality isgiven (figure 18(a)). From these data representations, astraightforward remark deals with the proportional be-havior of the ηtp and ηmd, which are closely coupled andshare the same information. On the other hand, there isno evident relation between MED and the η measures,the Pearson correlation coefficient between these two se-ries is not indicative enough, nevertheless, the coefficientis low enough (0.60) to indicate no significant redun-dancy of information. Finally, a clear tendency appears
(a) PMDall
(b) PMDtp (c) PMDmd
Fig. 16. Histogram of PMD. The mean value PMDall = 0.5and it can be broken down in two parts, PMDtp = 0.18 andPMDmd = 0.32.
between PMD and MED, it reveals a low correlation(0.24) between PMD and MED. A situation of inde-pendence between the two series can be accepted. Thesevariables really express two different kinds of informa-tion. They represent original viewpoints on the underly-ing problem.
4 Conclusion and perspectives
In this paper, we defined a protocol for performance eval-uation of polygon detection algorithms. A discussion be-tween the proposed protocol and the literature is alsopresented. As a consequence, our protocol is positionedas an extension of prior works, an extension at poly-gon level. In this way, it is closer to the semantic leveland closer to objects handled by humans. Former bench-marks only include synthetic images with image degra-dation but we completed these artificial samples by realimages with manually created ground-truth. Gatheringreal data to test and comparing graphics recognition sys-tems is very time consuming that is why we propose ourdata set to the community.
Our contribution is two-fold, an object mapping al-gorithm to roughly locate errors within the drawing, andthen a cycle graph matching distance that depicts the ac-curacy of the polygonal approximation. Both were theo-

R. Raveaux: Evaluation of Vectorized Documents 17
(a) MEDall
(b) MEDtp (c) MEDmd
Fig. 17. Histogram of MED. The mean value MEDall =0.66 and it can be broken down in two parts, MEDtp = 0.36and MEDmd = 0.30.
(a) Scatterplots (b) Image of the correlationmatrix
PMDtp MEDtp ηtp ηmd
PMDtp 1.0000000 0.2411222 0.4311698 -0.4311698MEDtp 0.2411222 1.0000000 0.6088518 -0.6088518
ηtp 0.4311698 0.6088518 1.0000000 -1.0000000ηmd -0.4311698 -0.6088518 -1.0000000 1.0000000
(c) Correlation matrix
Fig. 18. (a) Scatterplots of the proposed indices; (b) Image ofthe inter-indices correlation matrix , the lighter is the shade ofgrey, the higher is the correlation coefficient; (c) Correlationmatrix.
retically defined and adapted to the performance evalua-tion of polygonized documents. Especially, cost functionswere reconsidered, using a set distance for the polygonmatching distance (PMD) and defining particular editcosts for the graph matching method.
The proposed protocol is objective and comprehen-sive, both detection and false alarm rates are considered.By stress testing a given system, we demonstrated thatour protocol can reveal strengths and weaknesses of asystem. The behavior of our set of indices was analyzedwhen increasing image degradation.
The results presented in figure 16 and 17 indicatethat the proposed protocol reflects polygon detectionand approximation performance accurately. In figure 18,the statistical tests demonstrated that the two proposedmeasures offer different kinds of information.
We have also confronted our measures of quality toa human-based evaluation. However, more work shouldbe done in this respect to obtain an objective assessmenton commonly accepted criteria.
The protocol is designed for polygons but may alsobe extended to other line shapes by completing the graphrepresentation to connected vectors instead of searchingfor cyclic polygons. In this context, the PMD would nothave to be modified at all. The MED which is represen-tative of the manual effort to be made to correct mistakesengendered by a R2V system is envisaged through thegraph matching question in terms of basic edit opera-tions (addition, deletion, substitution). The graph for-malism confers to the approach a more generic natureand opens the way to future works on more complex ob-jects. This graph-based viewpoint could be the containerof a wider range of entities. Instead of focusing on poly-gon items, a given element could be constituted of allconnected segments to form a more complex structurethan a polygon while the entire principle would remainunchanged. The graph representation is an open way toa more global paradigm, the object matching question.This could change the scope of our performance evalua-tion tool to the direction of object spotting.
References
1. David Byrnes. Raster-to-vector comes of age with Auto-CAD Release 14. CADALYST, pages 48–70, 1997.
2. R Kasturi and K Tombre (eds.). Graphics Recognition:Methods and Applications. First International Work-shop, University Park, PA, USA, August 1995, Selectedpapers published as Lecture Notes in Computer Science,1072, 1996.
3. B Kong, I T Phillips, R M Haralick, A Prasad, andR Kasturi. A benchmark: performance evaluation ofdashed-line detection algorithms. Graphics recognitionmethods and applications (Lecture Notes in ComputerScience), 1072:270–285, 1996.
4. D Dori, L Wenyin, and M Peleg. How to win a dashed linedetection contest. Graphics Recognition Methods and Ap-plications, Lecture Notes in Computer Science, Springer,1072, 1996.
5. A Chhabra and I Phillips. The Second InternationalGraphics Recognition Contest - Raster to Vector Con-version: A Report. Graphics Recognition: Algorithms and

18 R. Raveaux: Evaluation of Vectorized Documents
Systems, Lecture Notes in Computer Science, Springer,1389, 1998.
6. I Phillips, J Liang, A Chhabra, and R Haralick. A Per-formance Evaluation Protocol for Graphics RecognitionSystems. Graphics Recognition: Algorithms and Systems,Lecture Notes in Computer Science, Springer, 1389, 1998.
7. I Phillips and A Chhabra. Empirical Performance Eval-uation of Graphics Recognition Systems. IEEE Trans-action of Pattern Analysis and Machine Intelligence, 21,No 9:849–870, 1999.
8. Liu Wenyin and Dov Dori. A protocol for performanceevaluation of line detection algorithms. Machine Visionand Applications, 9(5):240–250, 1997.
9. R M Haralick. Performance characterization in imageanalysis thinning, a case in point. Pattern Recogn Lett,13:5–12, 1992.
10. S Lee, L Lam, and C Y Suen. Performance evaluation ofskeletonization algorithms for document image process-ing. Proceedings of the First International Conference onDocument Analysis and Recognition, 1:260–271, 1991.
11. L Lam and C Y Suen. Evaluation of thinning algorithmsfrom an OCR viewpoint. Proceedings of the Second Inter-national Conference on Document Analysis and Recogni-tion, 1:287–290, 1993.
12. M Y Jaisimha, R M Haralick, and D Dori. A methodol-ogy for the characterization of the performance of thin-ning algorithms. Proceedings of the Second Interna-tional Conference on Document Analysis and Recogni-tion, 1:282–286, 1993.
13. L P Cordella and A Marcelli. An alternative approachto the performance evaluation of thinning algorithms fordocument processing applications. Graphics recognitionmethods and applications (Lecture Notes in ComputerScience), 1072:13–22, 1996.
14. R Kasturi, S T Bow, W El-Masri, J Shah, J R Gat-tiker, and U B Mokate. A system for interpretation ofline drawings. IEEE Trans Pattern Anal Machine Intell,17:978–992, 1990.
15. V Nagasamy and N Langrana. Engineering drawing pro-cessing and vectorization system. Comput Vision Graph-ics Image Process, 49:379–397, 1990.
16. A J Filipski and R Flandrena. Automated conversion ofengineering drawings to CAD form. Proc IEEE, 80:1195–1209, 1992.
17. L Boatto. An interpretation system for land registermaps. IEEE Computer, 25(7):25–32, 1992.
18. P Vaxiviere and K Tombre. Celestin: CAD conversion ofmechanical drawings. IEEE Comput, 25:46–54, 1992.
19. D Dori. Vector-based arc segmentation in the machinedrawing understanding system environment. IEEE TransPattern Anal Machine Intell, 17:959–971, 1995.
20. D Dori, Y Liang, J Dowell, and I Chai. Spare pixel recog-nition of primitives in engineering drawings. MachineVision Appl, 6:79–82, 1993.
21. Rangachar Kasturi and Karl Tombre, editors. Graph-ics Recognition, Methods and Applications, First Interna-tional Workshop, University Park, PA, USA, August 10-11, 1995, Selected Papers, volume 1072 of Lecture Notesin Computer Science. Springer, 1996.
22. Graphics Recognition, Algorithms and Systems, SecondInternational Workshop, GREC’97, Nancy, France, Au-gust 22-23, 1997, Selected Papers. In Karl Tombre andAtul K Chhabra, editors, GREC, volume 1389 of LectureNotes in Computer Science. Springer, 1998.
23. Atul K Chhabra and Dov Dori, editors. Graphics Recog-nition, Recent Advances, Third International Workshop,GREC’99 Jaipur, India, September 26-27, 1999, SelectedPapers, volume 1941 of Lecture Notes in Computer Sci-ence. Springer, 2000.
24. O Hori and D S Doermann. Quantitative measurementof the performance of raster-to-vector conversion algo-rithms. Graphics recognition methods and applications(Lecture Notes in Computer Science), 1072:57–68, 1996.
25. Robert W Floyd. Nondeterministic Algorithms. J. ACM,14(4):636–644, 1967.
26. H Bunke. On a relation between graph edit distanceand maximum common subgraph. Pattern RecognitionLetters, 18(9):689–694, 1997.
27. Horst Bunke and Kim Shearer. A graph distance met-ric based on the maximal common subgraph. PatternRecognition Letters, 19(3-4):255–259, 1998.
28. E M Arkin, L P Chew, D P Huttenlocher, K Kedem,and J S B Mitchell. An Efficiently Computable Metricfor Comparing Polygonal Shapes. IEEE Transactions onPattern Analysis and Machine Intelligence, 13(3):209–216, 1991.
29. J Llados, E Marti, and J J Villanueva. Symbol Recogni-tion by Error-Tolerant Subgraph Matching between Re-gion Adjacency Graphs. IEEE Transactions on PatternAnalysis and Machine Intelligence, 23:1137–1143, 2001.
30. H Bunke and G Allermann. Inexact graph matching forstructural pattern recognition. Pattern Recognition Let-ters, 1:245–253, 1983.
31. A Sanfeliu and K Fu. A distance measure between at-tributed relational graphs for pattern recognition. IEEETransactions on Systems, Man, and Cybernetics, (PartB) 1:353–363, 1983.
32. Y T Tsay and W H Tsai. Model-guided Attributed StringMatching by Split-and-merge for Shape Recognition. In-ternational Journal on Pattern Recognition and ArtificialIntelligence, 3(2):159–179, 1989.
33. Ernest Valveny and Philippe Dosch. Symbol RecognitionContest: A Synthesis. Graphics Recognition, pages 368–385, 2004.
34. E Valveny, P Dosch, Adam Winstanley, Yu Zhou,Su Yang, Luo Yan, Liu Wenyin, Dave Elliman, Math-ieu Delalandre, Eric Trupin, Sebastien Adam, and Jean-Marc Ogier. A general framework for the evaluation ofsymbol recognition methods. International Journal onDocument Analysis and Recognition, 9(1):59–74, March2007.
35. Mathieu Delalandre, Ernest Valveny, Tony Pridmore,and Dimosthenis Karatzas. Generation of synthetic doc-uments for performance evaluation of symbol recognition& spotting systems. International Journal on DocumentAnalysis and Recognition, page Online first, 2010.
36. Philippe Dosch and Ernest Valveny. Report on the Sec-ond Symbol Recognition Contest, 2006.
37. T F Cootes, C J Taylor, D H Cooper, and J Graham. Ac-tive shape models—their training and application. Com-put. Vis. Image Underst., 61(1):38–59, 1995.
38. D. GHOSH and A. P. SHIVAPRASAD. An analytic ap-proach for generation of artificial hand-printed characterdatabase from given generative models. Pattern recogni-tion, 32(6):907–920, 1999.
39. E Valveny and E Marti. A model for image generationand symbol recognition through the deformation of linealshapes. Pattern Recognition Letters, 24(15):2857–2867,2003.

R. Raveaux: Evaluation of Vectorized Documents 19
40. Robert M Haralickt, Henry S Baird, and David Adihan.Document Degradation Models: Parameter Estimationand Model Validation, June 2009.
41. Gabriella Sanniti di Baja and Edouard Thiel. Skele-tonization algorithm running on path-based distancemaps. Image and Vision Computing, 14(1):47–57, 1996.
42. Karin Wall and Per-Erik Danielsson. A fast sequentialmethod for polygonal approximation of digitized curves.Comput. Vision Graph. Image Process., 28(3):220–227,1984.
43. Romain Raveaux, Jean-Christophe Burie, and Jean-MarcOgier. A colour text/graphics separation based on agraph representation. 19th International Conference onPattern Recognition (ICPR), pages 1–4, 2008.
44. Romain Raveaux, Jean-Christophe Burie, and Jean-MarcOgier. Object Extraction from Colour Cadastral Maps.IAPR International Workshop on Document AnalysisSystems, 0:506–514, 2008.
45. Herve Locteau, Romain Raveaux, Sebastien Adam, YvesLecourtier, Pierre Heroux, and Eric Trupin. Approxima-tion of Digital Curves using a Multi-Objective GeneticAlgorithm. In 18th International Conference on PatternRecognition (ICPR), pages 716–719, Washington, DC,USA, 2006. IEEE Computer Society.
46. Alfredo Ferreira Jr, Jr. Manuel, J Fonseca, andJoaquim A Jorge. Polygon Detection from a Set of Lines.In In Proceedings of 12 o Encontro Portugues de Com-putacao Grafica (12th EPCG), pages 159–162, 2003.
47. R Raveaux, J.-C. Burie, and J.-M. Ogier. A Colour Doc-ument Interpretation: Application to Ancient CadastralMaps. Document Analysis and Recognition, InternationalConference on, 2:1128–1132, 2007.
Romain Raveaux received the B. Eng. and M.Sc. degreesin Computer Science and Information Engineering from theUniversity of Rouen, France, in 2004 and 2006, respectively.He is currently a Ph.D. student in the department of Com-puter Science at the University of La Rochelle, France. Hisresearch interests include algorithm and data structure forimage retrieval, data mining and graph-based representation.
Jean-Christophe Burie received his Ph.D. degree in Au-tomatic Control Engineering and Industrial Data Processingfrom University of Lille, France, in 1995. During his thesis(1993 - 1995), he worked on stereovision algorithms for ob-stacle detection in the framework of the European ProjectEUREKA-Prometheus. He was a research fellow in the De-partment of Mechanical Engineering for Computer-ControlledMachinery, Osaka University, Japan from 1995 to 1997 in theframework of the Lavoisier Program of the French ForeingOffice. Since 1998, Jean-Christophe Burie is assistant pro-fessor in the Computer Science Department at La RochelleUniversity. His current research interests include computervision, color image processing, pattern recognition.
Jean-Marc Ogier received his Ph.D. degree in ComputerScience from the University of Rouen, France, in 1994. Dur-ing his thesis, he worked on cadastral maps recognition andwas involved in several research projects. From 1994 to 2000,he was an Assistant Professor in Computer Engineering atthe University of Rennes, and at the University of Rouen. In2000, he obtained his advanced Ph.D. (Habilitation) in Com-puter Science from the University of Rouen for his work inthe fields of graphic recognition. Since 2001, he has been a
full Professor in the university of La Rochelle. His present re-search interests deal with graphic recognition, a more specif-ically graphic document indexing. He is the leader of the re-search team i-Medoc of the L3I Laboratory, and manages sev-eral national (and european research projects (MADONNE,NAVIDOMASS, RECONOMAD, ...) He is deputy directorof the GDR I3 of the French CNRS and is Vice-Chair ofthe Technical 10 (Graphic Recognition) of the InternationalAssociation for Pattern Recognition.






















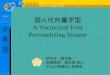






![1 Technische Universitat Darmstadt, Germany¨ Abstract ... · ple Eigen’s transformations [7] for depth estimation. Eval-uating on KITTI dataset [9] for moderate objects, Center3D](https://img.pdfslide.net/doc/110x75/5f80b3f009b83d54436d7f3e/1-technische-universitat-darmstadt-germany-abstract-ple-eigenas-transformations.jpg)