Embed Size (px)
Citation preview

IEEE COMMUNICATIONS LETTERS, VOL. 10, NO. 12, DECEMBER 2006 807
A Localized Algorithm for FindingDisjoint Paths in Wireless Sensor Networks
Ronghui Hou, Student Member, IEEE, and Haoshan Shi
Abstract— This letter presents a localized algorithm that findsmultiple node-disjoint paths in wireless sensor networks. Thealgorithm needs only local topology knowledge and providesautomatic path restoration. We describe the algorithm, givethe proof of correctness, and evaluate its performance usingsimulation. We conclude that the proposed algorithm is moresuitable for wireless sensor networks than the existing distributedalgorithms.
Index Terms— Disjoint paths, localized algorithm, wirelesssensor networks.
I. INTRODUCTION
THIS letter addresses the problem of finding minimumcost node-disjoint paths in wireless sensor networks. The
motivation for the shortest disjoint paths problem consideredin this letter is two-fold. The first is the need to raise robust-ness. Besides environmental factors and probabilistic failure ofhardware components, sensor networks can fail rather quicklydue to wasteful energy expenditure. The degree of failureprotection is directly related to the degree of disjointedness,k, of the paths joining a node to a data sink. A k-disjointstructure can protect against failure of k links or nodes. Thesecond motivation is the importance of energy efficiency inwireless sensor networks. A more energy efficient approach isto create multiple paths so that less route updating is required.
There are many multi-path network structures mentionedin the research literature [1]-[4]. They mostly deal with thegeneration of multiple node-disjoint or edge-disjoint pathsfrom each node to one single destination, but they all needglobal topology information which is difficult for wirelesssensor networks. These algorithms create strong couplingbetween routing tables that makes a localized recovery schemenearly impossible. As a rule of thumb, to generate a k-disjointstructure requires about k times than the overhead complexityof a shortest path algorithm. After the k +1 failures occurred,a global scale recomputation with complexity k times that ofa shortest path algorithm will be required. Therefore, thesealgorithms are very energy wasteful. SAR [5] proposed analgorithm which loosens up this coupling effect by relaxingthe disjoint requirement outside the one-hop neighborhoodof the sink and provides automatic path restoration, but thismethod lowers the degree of failure protection. In this letter,we present a localized algorithm for finding node-disjointpaths (LAND). The algorithm not only constructs a set of
Manuscript received July 13, 2006. The associate editor coordinating thereview of this letter and approving it for publication was Prof. GianlucaMazzini.
The authors are with the School of Electrical and Information, Northwest-ern Polytechnical University, Xi’an, China (email: hrh [email protected]).
Digital Object Identifier 10.1109/LCOMM.2006.061095.
minimum cost node-disjoint paths from every node to a sinkonly by using local information, but also provides localizedpath restoration.
II. DEFINITION AND NOTATION
For a finite set X, |X|denotes the number of elements inX. For convenience, the following list summarizes notationintroduced in this section:
N— set of nodesE— set of directed linkss–sink(i, j)— link from node i to node jA(i)— {∀j ∈ N | (i, j)∈E}z(i, j)— cost of link (i, j)L(p)— the neighbor of sink on path p, also presents the
path identifierT (i, s)— the shortest path from i to s, also presents set of
nodes on the path from i to s. A node k∈T (i, s) is called theuptree of i, and i is called the downtree of k
Th(i, s)— the path from i to s with L(p)=h, also presentsset of nodes on the path from i to s with L(p)=h
{Tj(i)}— set of routing tables for node i, contains theinformation of {(h, j) | h∈A(s), j∈A(i)}
D(h, i)— minimum path length from i to s with L(p)=hDi(h, k)— the value of D(h, k) that was last received by
node i from node kp(i)— p(i) ∈ T (i, s) ∧ p(i) ∈ A(i). p(i) is successor of i,
and i is predecessor of p(i)H(i)— the neighbor which is not successor or predecessor
of i, called nontree neighbor, link which connects i and H(i)is called nontree link
h∗(i)— h∗(i)∈L(p) ∧ h∗(i)∈T (i, s)d(i)— shortest distance from i to sd1(i)— the least length of all paths from i to s except
T (i, s)Then, d(i), Tj(i), and d1(i) are computed according to:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
d(i)= min(h,l)∈A(s)×A(i)
{Di(h, l) + z(i, l)}T1(i)=(h∗, l∗)=arg d(i)d1(i)= min
(h,l)∈A(s)×A(i)−(h∗,l∗){Di(h, l) + z(i, l)}
T2(i)=(h1, l1)=arg d1(i)...
dj(i)= min(h,l)∈A(s)×A(i)−{T1(i),...,Tj−1(i)}
{Di(h, l)+z(i, l)}Tj(i)=(hj−1, lj−1)=arg dj(i)
(1)Where, 1 < j < min{|A(k)|, |A(i)|} + 1.
1089-7798/06$20.00 c© 2006 IEEE

808 IEEE COMMUNICATIONS LETTERS, VOL. 10, NO. 12, DECEMBER 2006
III. LOCALIZED ALGORITHM
Initially, d(i) = d1(i) = Di(h, k) = D(h, i) = ∞ for i �= sand h∈A(s); D(h, h)= z(s, h) for h∈A(s) ; all other vari-ables are initially undefined. Two type of messages are sent byeach node i: M1(h, i) contains the information {d(i), h∗(i)},and M2(h, i) contains the information {d1(i), h1(i)}. The sinks starts the algorithm by sending the message M1(s, s) to allof its neighbors, and this message is only used to initiate thepaths construction process. The algorithm for each node i �= sis as follows:
1) If node i receives a message M1(s, s), it sets d(i) =z(i, s), h∗(i)= i.
2) If node i receives a message M1(h, l) from node l ∈A(i), it updates its routing information according to (1).
3) If node i receives a message M2(h, l) from node l ∈A(i) and d1(i) < Di(h′, i) ∧ d1(i) < D(h, k) forh′ ∈ A(s) and k ∈ A(i), i includes T ′ = (h, l) in{Tj(i)}, and excludes from {Tj(i)} every path whichintersects T ′=(h, l), and updates its routing informationaccording to (1).
4) If d(i) changes, node i sends M1(h∗, i) to each of itsneighbors. If l∗ changes, node i requires node l∗ to beits predecessor.
5) If d1(i) changes, node i sends M2(h1, i) to its eligibleneighbor. Node i does not send M2(h1, i) to a neighbork, if h∗(k)=h∗(i) ∧ p(k) �=p(i) ∧ k �=p(i).
6) If the energy resources in node k is completely ex-hausted, node i∈A(k) who registered the path from kto sink will initiate the path restoration by broadcastingREQ message.
7) If node j ∈ A(i) receives REQ message, it sendsM1(h, j) and M2(h1, j) to its eligible neighbors.
Lemma 1: D(h, l) + z(i, l) is the least length of the path(i, l)Th(l, s).
Proof: We prove this by induction on the length of thepath (i, l)Th(l, s). Let h= l, then D(l, l)=z(l, s). Because anypath from l to s at least contains (l, s), Di(l, l)+ z(i, l) is theleast length of the path (i, l)Tl(l, s). Our induction hypothesisstates that D(h, k) is the least length of the path from k to swith h for k∈Th(l, s). Node j∈A(k)∧ j∈Th(l, s) computes
D(h, j)=D(h, k) + z(j, k)= minm∈A(j)
{Dj(h,m) + z(j,m)}
so the least length of the path Th(j, s) is D(h, j). Continuingthis argument, eventually we have j = l, so D(h, l) + z(i, l)is the least length of the path (i, l)Th(l, s). The Lemma 1 isshown.
Theorem 1: The algorithm constructs the shortest node-disjoint paths from every node to sink.
Proof: By Lemma 1, every path Th(l, s) is shortest.It suffice to show that if node i compute k paths T ={T1(h∗, l∗), T2(h1, l1), . . . , Tk(hk−1, lk−1)}, any two differ-ent paths have no common nodes.
We first show that T1(h∗, l∗) and Tj(hj−1, lj−1)∈T haveno common nodes. There are two cases that we need toconsider:
1) If h∗(lj−1) �= h∗(i), we know that Di(hj−1, lj−1) =d(lj−1) and hj−1 =h∗(lj−1), and according to the prop-
TABLE I
THE TOTAL NUMBER OF MESSAGES FOR DIFFERENT ALGORITHMS
Network(n, r) LAND SF SS SAR
(100,40) 162583 239193 162939 725112
(200,40) 607082 893402 628544 2727356
(300,40) 1485111 2244997 1546307 7284348
(400,40) 2564982 3930716 2696953 12958866
(500,40) 3936976 5552524 4248653 19084902
(500,30) 1818965 1720124 1879564 5903070
(500,50) 6538484 11863722 6573843 46031101
(500,60) 9463978 20744167 9360945 83665193
TABLE II
THE TOTAL NUMBER OF PATHS FOR DIFFERENT ALGORITHMS
Network(n, r) LAND SF SS SAR
(100,40) 34955 30354 19726 84744(29620)
(200,40) 120413 103299 79079 329343(105948)
(300,40) 281701 234203 176264 807587(247423)
(400,40) 474863 390174 301617 1398078(424199)
(500,40) 720481 559305 497199 2181628(651408)
(500,30) 390473 154967 296322 1149548(384404)
(500,50) 1163305 908797 499000 3381723(980050)
(500,60) 1759508 1273269 499000 4354773(1357933)
erties of spanning tree, the paths (i, lj−1)Thj−1(lj−1, s)and (i, l∗)Th∗(l∗, s) have no common nodes.
2) If h∗(lj−1)=h∗(i), suppose the two paths have commonnode m. According to our algorithm, if p(lj−1) �= p(i)∧i �= p(lj−1), lj−1 will not send M2(hj−1, lj−1) to i, sonode is uptree of lj−1. There must exist a node m1 ∈(i, lj−1)Thj−1(lj−1, s) such that h∗(m1) �= h∗(m) anda nontree link e = (mi,mj) ∈ (i, lj−1)Thj−1(lj−1, s)for h∗(mi) �= h∗(mj) ∧ h∗(mj) = h∗(m). Hence, thepath (i, lj−1)Th∗(mi)(lj−1, s) is shorter than the path(i, lj−1)Thj−1(lj−1, s), which contradicts that the path(i, lj−1)Thj−1(lj−1, s is shortest.
We then show that any two paths Tj+1(hj , lj) ∈ T andTk+1(hj , lk)∈T have no common nodes. Suppose that nodem is the first common node of these two paths, so node mwill send two different message M2(hj ,m) and M2(hk,m). IfD(hj ,m) < D(hk,m), according to our algorithm, the neigh-bors of node m will discard the information of M2(hk,m).Therefor, node i will not receive the information of the pathTk+1(hk, lk)∈T, which contradicts our supposition.
IV. SIMULATION
In this section, we present simulation results based onour algorithm (LAND), Sidhu-Nair (SF) [2], Ogier-Shacham(SS) [3], and SAR [5]. We simulate networks of a varyingnumber of nodes, n. Initially, 100 nodes were randomly placedin a 227m by 227m square. We study five sensor fields,ranging from 100 to 500 nodes in increments of 100 nodes.Network size is generated by scaling the square and keepingthe average density of sensor nodes constant [6]. To comparethe quality of paths found by these four algorithms, we use thestretch factor for a path Th(i, s) which is defined as z(Th(i,s))
z(T (i,s)) .
HOU and SHI: A LOCALIZED ALGORITHM FOR FINDING DISJOINT PATHS IN WIRELESS SENSOR NETWORKS 809
TABLE III
THE QUALITY OF PATHS FOR DIFFERENT ALGORITHMS
Network(n, r) LAND SF SS SAR
(100,40) 1.23258 1.49028 1.04603 1.36969
(200,40) 1.13599 1.40632 1.02446 1.26789
(300,40) 1.11259 1.40492 1.01851 1.22865
(400,40) 1.09055 1.40891 1.01124 1.20189
(500,40) 1.07838 1.43611 1.00967 1.17142
(500,30) 1.0378 1.23312 1.02159 1.1236
(500,50) 1.10451 1.33649 1.01171 1.21943
(500,60) 1.13734 1.31464 1.011862 1.24276
TABLE IV
THE OVERHEAD EFFICIENCY FOR DIFFERENT ALGORITHMS
Network(n, r) LAND SF SS SAR
(100,40) 4.65121 7.88011 8.26011 8.5565
(200,40) 5.04166 8.6487 7.9483 8.2812
(300,40) 5.27194 9.58569 8.77268 9.01989
(400,40) 5.40152 10.0743 8.94165 9.26906
(500,40) 5.46437 9.92754 8.54518 8.74801
(500,30) 4.65836 11.0999 6.34298 5.13512
(500,50) 5.62061 13.0543 13.174 13.6117
(500,60) 5.37876 16.2921 18.7594 19.2123
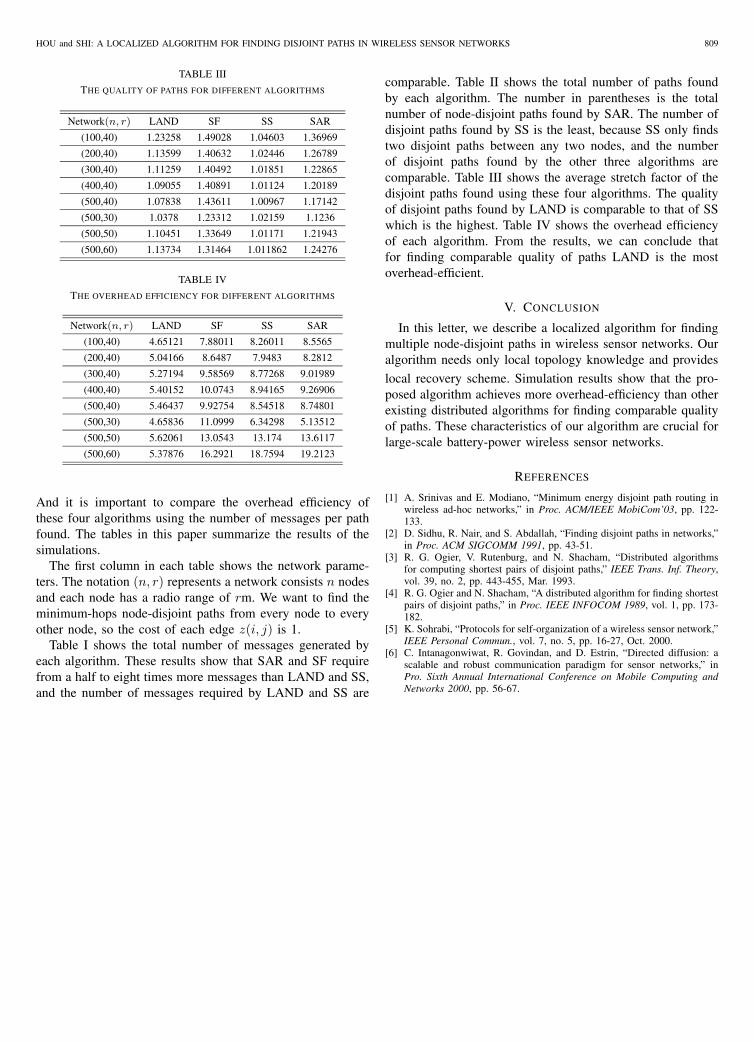
And it is important to compare the overhead efficiency ofthese four algorithms using the number of messages per pathfound. The tables in this paper summarize the results of thesimulations.
The first column in each table shows the network parame-ters. The notation (n, r) represents a network consists n nodesand each node has a radio range of rm. We want to find theminimum-hops node-disjoint paths from every node to everyother node, so the cost of each edge z(i, j) is 1.
Table I shows the total number of messages generated byeach algorithm. These results show that SAR and SF requirefrom a half to eight times more messages than LAND and SS,and the number of messages required by LAND and SS are
comparable. Table II shows the total number of paths foundby each algorithm. The number in parentheses is the totalnumber of node-disjoint paths found by SAR. The number ofdisjoint paths found by SS is the least, because SS only findstwo disjoint paths between any two nodes, and the numberof disjoint paths found by the other three algorithms arecomparable. Table III shows the average stretch factor of thedisjoint paths found using these four algorithms. The qualityof disjoint paths found by LAND is comparable to that of SSwhich is the highest. Table IV shows the overhead efficiencyof each algorithm. From the results, we can conclude thatfor finding comparable quality of paths LAND is the mostoverhead-efficient.
V. CONCLUSION
In this letter, we describe a localized algorithm for findingmultiple node-disjoint paths in wireless sensor networks. Ouralgorithm needs only local topology knowledge and provides
local recovery scheme. Simulation results show that the pro-posed algorithm achieves more overhead-efficiency than otherexisting distributed algorithms for finding comparable qualityof paths. These characteristics of our algorithm are crucial forlarge-scale battery-power wireless sensor networks.
REFERENCES
[1] A. Srinivas and E. Modiano, “Minimum energy disjoint path routing inwireless ad-hoc networks,” in Proc. ACM/IEEE MobiCom’03, pp. 122-133.
[2] D. Sidhu, R. Nair, and S. Abdallah, “Finding disjoint paths in networks,”in Proc. ACM SIGCOMM 1991, pp. 43-51.
[3] R. G. Ogier, V. Rutenburg, and N. Shacham, “Distributed algorithmsfor computing shortest pairs of disjoint paths,” IEEE Trans. Inf. Theory,vol. 39, no. 2, pp. 443-455, Mar. 1993.
[4] R. G. Ogier and N. Shacham, “A distributed algorithm for finding shortestpairs of disjoint paths,” in Proc. IEEE INFOCOM 1989, vol. 1, pp. 173-182.
[5] K. Sohrabi, “Protocols for self-organization of a wireless sensor network,”IEEE Personal Commun., vol. 7, no. 5, pp. 16-27, Oct. 2000.
[6] C. Intanagonwiwat, R. Govindan, and D. Estrin, “Directed diffusion: ascalable and robust communication paradigm for sensor networks,” inPro. Sixth Annual International Conference on Mobile Computing andNetworks 2000, pp. 56-67.





























