Embed Size (px)
Citation preview

Multibody System Dynamics (2006) 15: 1–24
DOI: 10.1007/s11044-006-2359-z C© Springer 2006
A Modified Implicit Euler Algorithm for Solving
Vehicle Dynamic Equations
GEORG RILLFH Regensburg, University of Applied Sciences, Galgenbergstr. 30, 93053 Regensburg, Germany;E-mail: [email protected]
(Received: 27 May 2005; accepted in revised form: 6 June 2005)
Abstract. Vehicle modelling is usually done by Multibody Systems. Very often the overall model
consists of several subsystems, like the vehicle framework, the drive train and the steering system. Due
to the tire forces and torques and due to small but essential compliances in the axle/wheel suspension
systems the resulting differential equations are stiff. To improve the model quality dynamic models for
some components like damper, and rubber elements are used. Again these models contain stiff parts.
If the implicit Euler Algorithm is adopted to the specific problems in vehicle dynamics a very
effective numerical solution can be achieved. Applied to vehicle dynamic equations the algorithm
produces good and stable results even for integration step sizes in the magnitude of milliseconds. As
it gets along with a minimum number of operations a very good run time performance is guaranteed.
Hence, even with very sophisticated vehicle models real time applications are possible. Due to its
robustness the presented algorithm is very well suited for co-simulations. The modifications in the
implicit Euler Algorithm also make it possible to use a simple model for describing the dry friction
in the damper and in the brake disks.
A quarter car vehicle model with a longitudinal and a vertical compliancy in the wheel suspension
and a dynamic damper model including dry friction is used to explain the algorithm and to show its
benefits.
Keywords: multibody systems, vehicle dynamics, stiff differential equations, dry friction, implicit
integration algorithm, real-time simulation
1. Modelling Aspects
1.1. OVERALL VEHICLE MODEL
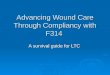
Vehicle modelling is normally based on Multibody Systems [3]. Usually the overallvehicle model is separated into different subsystems [7]. Figure 1 shows the com-ponents of a passenger car model which can be used to investigate the handling andride properties.
The vehicle framework consisting of the vehicle chassis and the wheel/axlesuspension system is the kernel of the model. It directly interacts with most ofthe other subsystems. The equations of motion for the vehicle framework can bederived from Jourdain’s principle [11].
An enhanced vehicle model with an elastically suspended engine, four passen-gers and complex axle models comes up to nD ≈ 80 degrees of freedom. Due to thetire forces and torques and due to small but essential compliances in the axle/wheel

2 G. RILL
Figure 1. Overall vehicle model.
suspension systems the resulting differential equations are stiff. To improve themodel quality dynamic models for some components like damper, and rubber ele-ments are used. Again these subsystems contain stiff parts.
1.2. ENHANCED QUARTER CAR MODEL
To demonstrate the basic structure and the specific properties of vehicle dynamicequations a much simpler but still typical quarter car model is used. Figure 2 shows
Figure 2. Quarter car model.

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 3
an enhanced quarter car model which consists of the chassis, the knuckle and thewheel. The model describes a modern passenger car rear axle suspension where thecompliances in bushing B are taken into account.
The momentary position of the model bodies are described by nD = 6 general-ized coordinates which are arranged in the 6 × 1-vector
y = [uC , wC︸ ︷︷ ︸vehicle: yV
; uB, wB, βK︸ ︷︷ ︸axle: yA
; βW︸︷︷︸wheel:yW
]T , (1)
where uC , wC are the horizontal and vertical chassis motions, u B , wB are thedisplacements in bushing B, the angle βK describes the rotation of the knucklerelative to the chassis and βW is the absolute wheel rotation. The sub-vectors yV ,yA and yW take the structure of the vehicle model into account.
The road irregularities are described by ξ = ξ (xQ), where xQ denotes the x-coordinate of a vector from the inertia frame to the tire contact point Q.
2. Vehicle Dynamic Equations
2.1. BASIC EQUATIONS
Figure 3 shows the elements of the enhanced quarter car model. Masses and mo-ments of inertia are given by mC , mK , mW and �K , The forces in the bushing,the spring and the damper are denoted by FB , FS and FD. Aerodynamic forcesare neglected within this quarter car model. The weight forces of the chassis, theknuckle and the wheel are expressed by GC , G K and GW . The braking torque TB
acts between wheel and knuckle whereas the drive torque TD acts between chassisand wheel. According to the standard tire interface (STI) [5], the tire forces FT andtorques TT generated in the contact area are transferred from the contact point Q
Figure 3. Elements of an enhanced quarter car model.

4 G. RILL
to the wheel center R. Finally FCK W describes the constraint force between wheel
and knuckle.Linear and angular momentum applied to each body yield
mC r0C,0 = −FB,0 − FS,0 − FD,0 + GC,0 ; (2)
mK r0K ,0 = FB,0 + FS,0 + FD,0 + G K ,0 + FCK W,0 ,
�K ω0K ,0 = rK B,0×FB,0 + rK S,0×FS,0 + rK D,0×FD,0
−TB,0 + rK R,0×FCK W,0 ; (3)
mW r0R,0 = FT,0 + G K ,0 − FCK W,0 ,
�W ω0W,0 = TD,0 + TT,0 + TB,0 (4)
where all vectors are expressed in the fixed frame 0 indicated by the comma sepa-rated subscript 0.
2.2. KINEMATICS
The momentary position of the chassis center C with respect to the fixed frame 0is given by
r0C,0 = r I0C,0 +
⎡⎢⎣ uC
0
wC
⎤⎥⎦, (5)
where r I0C,0 denotes the initial position of the chassis center.
The momentary position of the knuckle center K with respect to a fixed frame0 is described by
r0K ,0 = r0C,0 + r IC K ,0 +
⎡⎢⎣ uB
0
wB
⎤⎥⎦ + A0K
⎡⎢⎣ xBK
0
zBK
⎤⎥⎦︸ ︷︷ ︸
rBK ,0
, (6)
where the initial position of the knuckle center K relative to the chassis centerC is given by the vector r I
C K ,0 and the coordinates xBK , zBK are constants fixingthe position of K relative to the bushing center B at rotation angle βK = 0. Theorientation of the knuckle is given by the rotation matrix
A0K =
⎡⎢⎣ cosβK 0 sinβK
0 1 0
− sinβK 0 cosβK
⎤⎥⎦. (7)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 5
For a perfectly balanced wheel the wheel center R coincides with the center ofgravity. Hence, similar to Equation (6) we get
r0R,0 = r0C,0 + r IC B,0 +
⎡⎢⎣ uB
0
wB
⎤⎥⎦ + A0K
⎡⎢⎣ xB R
0
zB R
⎤⎥⎦︸ ︷︷ ︸
rB R,0
, (8)
where xB R , zB R are constants describing the position of R relative to the bushingcenter B at rotation angle βK = 0.
Finally, the angular velocities of the knuckle and the wheel are given by
ω0K ,0 =
⎡⎢⎣ 0
βK
0
⎤⎥⎦, ω0W,0 =
⎡⎢⎣ 0
βW
0
⎤⎥⎦. (9)
2.3. JOURDAIN’S PRINCIPLE
Using the principle of Jourdain the constraint forces can be eliminated and theequations of motion can be written as a set of two first order differential equations
K (y) y = z, (10)
M(y)z = q(y, z), (11)
where K is called kinematic matrix, y is the vector of generalized coordinates, z isthe vector of generalized speeds and M denotes the mass matrix.
Within three-dimensional vehicle models suitable generalized speeds can bedefined by using the components of the vectors of the absolute velocity and theabsolute angular velocity expressed in a moving reference frame, c.f. [10]. Due tothe simplicity of this quarter car model only trivial generalized speeds
y = z (12)
are possible.Corresponding to the model structure the 6 × 6 mass matrix
M =
⎡⎢⎢⎣MV V MT
V A MTV W
MV A MAA MTAW
MV W MAW MW W
⎤⎥⎥⎦, (13)

6 G. RILL
consists of submatrices for the overall vehicle MV V , the axle MAA, the wheel MW W ,and the coupling matrices MV A, MV W , MAW . The elements of the submatrices aregiven by
MV V =[
mV 0
0 mV
], (14)
MV A =
⎡⎢⎣ m A 0
0 m A
rzm A −rx m A
⎤⎥⎦, MAA =
⎡⎢⎣ m A 0 rzm A
0 m A −rx m A
rzm A −rx m A �A
⎤⎥⎦, (15)
MV W = [0 0], MAW = [0 0 0], MW W = [�W ], (16)
where the following abbreviations were used
m A = mK + mW , mV = mC + mK + mW ,
rx m A = rBK x,0 mK + rB Rx,0 mW , rzm A = rBK z,0 mK + rB Rz,0 mW , (17)
�A = �K + (r2
BK z +r2BK x
)mK + (
r2B Rz +r2
B Rx
)mW
and rBK x , rBK z and rBK x,0, rB Rx,0 are the x and z-coordinates of the vectors rBK ,0
and rB R,0 which are defined in Equation (6) and Equation (8).Within this quarter car model all elements of the submatrices MV W and MAW
are equal to zero. In general the mass coupling between the wheel rotation and thevehicle model can be neglected, cf. [9]. Hence, the vehicle framework and the drivetrain can be described by separate subsystems.
2.4. GENERALIZED FORCES
The generalized force vector can be separated into two parts
q = qi + qa . (18)
where qi contains the weight and inertia forces and qa collects the applied forcesand torques. The generalized weight and inertia force vector is given by
qiV =[
FC I x + FK I x + FW I x
FC I z + FK I z + FW I z
],
qi A =
⎡⎢⎣ FK I x + FW I x
FK I z + FW I z
rBK z FK I x −rBK x FK I z + rB Rz FW I x −rB Rx FW I z
⎤⎥⎦ ,
qiW = [0],
(19)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 7
where
FC I x = 0,
FC I z = −mC g;
FK I x = mK rBK x β2K ,
FK I z = mK(rBK z β2
K −g);
FW I x = mW rB Rx β2K ,
FW I z = mW(rB Rz β2
K −g) (20)
and g denotes the constant of gravity.The contribution of each applied force Fi or torque Tj to the generalized force
vector qa can be calculated via the virtual power. For nF applied forces and nT
applied torques we get
qa =nF∑
i=1
(∂vi
∂z
)T
Fi +nT∑j=1
(∂ω j
∂z
)T
Tj , (21)
where vi is the velocity in direction of the applied force and ω j is the angularvelocity around the acting direction of the applied torque. Finally, z denotes thevector of generalized speeds which is defined by Equation (12).
3. Applied Forces and Torques
3.1. BUSH FORCES
In modern axle suspension systems the bush compliances have become designparameters, cf. [4]. As the compliancy of a bushing is limited the forces in bushingB are modelled by nonlinear spring damper elements
FBx = FBx (uB, u B) and FBz = FBz(wB, wB) (22)
where uB , u B and wB , wB are the bush displacements and their derivatives inlongitudinal and vertical direction.
The contribution of the bush forces to the vector of generalized forces andtorques is given by
qaFB = [0 0 1 0 0 0︸ ︷︷ ︸
∂ u B/∂z
]TFBx + [
0 0 0 1 0 0︸ ︷︷ ︸∂wB/∂z
]TFBz . (23)
As u B/∂z and wB/∂z are generalized speeds the partial derivatives ∂ u B and ∂wB
are quite simple.

8 G. RILL
3.2. SPRING FORCE
The spring is attached to the knuckle at point S and to the chassis at point P ,Figure 3. Neglecting dissipative terms the spring force can be modelled by a purefunction of the spring displacement uS
FS = FS (uS) , (24)
where the spring displacement is defined by the difference of the actual length andthe length of the spring in design position
uS = � − �0 . (25)
The actual spring length follows from
� =√(
rC P,0 − rC S,0
)T (rC P,0 − rC S,0
), (26)
where the actual position of the attachment points S and P is given by
rC P,0 =
⎡⎢⎣xC P
0
zC P
⎤⎥⎦ ; rC S,0 =
⎡⎢⎣ xC B + uB + cos βK xBS + sin βK zBS
0
zC B + wB − sin βK xBS + cos βK zBS
⎤⎥⎦ . (27)
Here xC P , zC P , xC B , zC B and xBS , zBS are constants describing the design positionof the attachment points S and P and the bushing center B.
According to Equation (21) the contribution of the spring force FS to the gen-eralized force vector qa can be calculated via
qaFS =(
∂ uS
∂z
)T
FS. (28)
As �0 and rC P,0 are both constant, the time derivative of the spring displacementuS results in
uS = � =2 (rC P,0 − rC S,0)T
(−∂rC S,0
∂yy
)2
√(rC P,0 − rC S,0)T (rC P,0 − rC S,0)
= − eTS P,0
∂rC S,0
∂yy, (29)
where y is the time derivative of the vector of generalized coordinates defined inEquation (1) and
eS P,0 = rC P,0 − rC S,0√(rC P,0 − rC S,0)T (rC P,0 − rC S,0)
(30)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 9
denotes a unit vector into the direction of the spring. From Equation (27) one gets
∂rC S,0
∂y=
⎡⎢⎢⎣0 0 1 0 − sin βK xBS +cos βK zBS 0
0 0 0 0 0 0
0 0 0 1 − cos βK xBS −sin βK zBS 0
⎤⎥⎥⎦. (31)
In this modelling approach trivial generalized speeds y = z were used. Hence,the time derivative of the spring displacement Equation (29) delivers by simpleinspection
∂ uS
∂z= ∂ uS
∂ y= − eT
S P,0
∂rC S,0
∂y. (32)
3.3. DAMPER TOP-MOUNT COMBINATION
The damper top-mount combination represents a dynamic force element which isattached at point D to the knuckle and at point E to the chassis, Figure 3.
A simple damper top-mount model which also takes the dry friction in thedamper into account is shown in Figure 4. Damper and top-mount are both describedby force characteristics, FD = FD (s) and FS = FS (u − s), where u and s are theoverall element and the pure damper displacement. If the dry friction is modelledby |FF | ≤ Fmx
F with FmxF as the maximum friction force then, the force balance
FS = FD + FF delivers a differential equation for the damper displacement s whichis defined in sections
FD (s) = FS (u − s) + FmxF , FS < −Fmx
F ,
s = 0, |FS| ≤ FmxF , (33)
FD (s) = FS (u − s) − FmxF , FS > +Fmx
F .
Here the damper displacement s acts as an internal state variable. Dependingon the model complexity of the damper and the top mount additional internal statevariables may be added. In general the overall force can be expressed as
FD = FD (y, z, sD) , (34)
Figure 4. Damper top-mount combination including dry friction.

10 G. RILL
where y, z are the vectors of generalized coordinates and speeds and sD is a vectorof damper internal state variables.
Similar to Equation (28) and Equation (32) the contribution of the overall damperforce to the generalized force vector qa is given by
qaFD = −(
∂rC D,0
∂y
)T
eDE,0 FD, (35)
where the partial derivative of the vector rC D,0 from the chassis center C to point Dand the unit vector eDE,0 into the direction of the damper top-mount combinationcorrespond with Equation (31) and Equation (30).
3.4. TIRE FORCES AND TORQUES
Tire forces and torques have a dominant influence on vehicle dynamics. The tiremodel TMeasy used here is based on a semi-empirical model approach whichprovides an useful compromise between user-friendliness, model-complexity andefficiency in computation time on the one hand, and precision in representation onthe other hand [2].
In a steady state approach the tire forces FT and torques TT are calculated fromthe position of the rim center r0R,0, its velocity v0R,0, the orientation of the knuckleA0K , the angular velocity of the knuckle ω0K ,0, the angular velocity βW = �W ofthe wheel and the road profile ζ
FT = FT (r0R,0, v0R,0, A0K , ω0K ,0, �W , ζ ) ,
TT = TT (r0R,0, v0R,0, A0K , ω0K ,0, �W , ζ ) .(36)
In general the tire forces and torques can be expressed as functions of the generalizedcoordinates y and generalized speeds z, the road profile ζ and in the case of dynamictire models of internal tire state variables sT
FT = FT (y, z, ζ, sT ) and TT = TT (y, z, ζ, sT ) . (37)
According to Equation (21) the contribution of FT and TT follows from
qaFT TT =(
∂ r0R,0
∂z
)T
FT,0 +(
∂ω0W,0
∂z
)T
T TT,0, (38)
where the partial derivatives are given by
∂ r0R,0
∂z=
⎡⎢⎣1 0 1 0 − sin βK xB R +cos βK zB R 0
0 0 0 0 0 0
0 1 0 1 − cos βK xB R −sin βK zB R 0
⎤⎥⎦ , (39)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 11
∂ω0W,0
∂z=
⎡⎣0 0 0 0 0 00 0 0 0 0 10 0 0 0 0 0
⎤⎦ (40)
and the constants xB R , zB R describe the design position of the rim center R.
3.5. DRIVING TORQUE
In complex vehicle models the drive torque at each wheel is generated by a separateengine model. Here, the drive torque is modelled by a simple time dependentfunction
TD = TD(t). (41)
The contribution to the generalized force vector is given by
qaTD = [0 0 0 0 0 1
]︸ ︷︷ ︸∂ ˙βW /∂z
T TD . (42)
3.6. BRAKING TORQUE
The brake torque is modelled by an enhanced dry friction model
TB = TB(ω) = T stB − dN ω with |TB | ≤ T mx
B , (43)
where T stB is the static part, dN > 0 is a constant, T mx
B denotes the maximum brakingtorque and
ω = βW − βK (44)
describes the relative angular velocity between wheel and knuckle. The enhancedbrake torque model avoids the jump at ω = 0, Figure 5, but via the static part it stillprovides a locking torque, TB(ω=0) = T st
B .The contribution to the generalized force vector is given by
qaTB = [0 0 0 0 −1 1
]︸ ︷︷ ︸∂ω/∂z
T TB . (45)

12 G. RILL
3.7. STRUCTURE OF THE GENERALIZED FORCES AND TORQUES
For the quarter car model the contribution of the applied forces and torques to thevector of generalized forces and torques is given by the 6 × 1-vector
qa = qaFB + qaFS + qaFD + qaFT TT + qaTD + qaTB . (46)
According to the model structure it can be split into different parts
qa = [qaT
V qaTA qaT
W
]T, (47)
where the 2 × 1-vector qaV and the 3 × 1-vector qaA describe the generalizedapplied forces and torques for the vehicle framework and qaW is the resultinggeneralized torque applied to the wheel.
4. Numerical Solution
4.1. STRUCTURE OF THE DYNAMIC EQUATIONS
Vehicle models have a typical model structure which in principle can be shown bythe quarter car model. At first there is the vehicle framework described by two setsof first order differential equations
K (y) y = z, (48)
M(y) z = q(y, z, w, s), (49)
where now
y =[
yV
yA
]and z =
[zV
z A
](50)
denote the generalized coordinates and the generalized speeds for the vehicle frame-work only. Hence, the kinematic matrix K , the mass matrix M and the vector ofgeneralized forces and torques q also consist of the parts related to the vehicleframework only. In general, the kinematic matrix and the mass matrix are functionsof the generalized coordinates, K = K (y), M = M(y). Here, the kinematic matrixis equal to the matrix of identity K = E . The vector of generalized forces andtorques q depend on the state y, z of the vehicle framework and on additional statesw, s describing the dynamics of subsystems like the drive train and external forceelements.

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 13
Within the quarter car model the drive train model consists just of the wheelrotation[
βW
�W
]︸ ︷︷ ︸
w
=[
�W
qW /�W
]︸ ︷︷ ︸
r
(51)
where �W = βW is the absolute wheel angular velocity, �W is the inertia of wheeland rim and qW = qiW + qaW are the generalized torques for the wheel rotationwhich are defined in Equation (19) and Equation (47).
In Equation (33) the dynamics of the damper top-mount model is described bya first order differential equation for the damper displacement s. It can be writtenas
s = g (y, z, s) . (52)
To keep the vehicle model modular the differential equations for the differentmodel parts are not combined in one system of first order differential equations.
4.2. MODEL DATA AND STIFFNESS PROPERTIES
According to [12] a set of N linear differential equations x = A x + h(t) is calledstiff, if the eigenvalues of A have negative real parts real(λi ) < 0, i = 1, 2, . . . , Nand if
max (|λi |)min (|λi |) � 1 (53)
holds. The left side of the equation in Equation (53) is called stiff ratio. In vehicledynamics the differential equations are nonlinear due to the kinematics and due tononlinear characteristics of forces and torques.
The bush forces in longitudinal and vertical direction are modelled by nonlinearspring characteristics, Figure 6, and linear damping elements, where the constantsdBx = 500.000 N/(m/s) and dBz = 1200.000 N/(m/s) are used to describe thedamping properties. The nonlinear characteristics of the top-mount and the damperare plotted in Figure 7. The combination of a coil spring and stops results in anonlinear overall spring characteristics, Figure 8a. As usual, the longitudinal tireforce Fx is plotted versus the longitudinal slip sx . Figure 8b also shows the influenceof the vertical load Fz . All the remaining data of the quarter car model are given inTable I.
The stiff ratio of nonlinear systems can only be determined by linearizing theequations of motions with respect to a certain operating point. Driving on a flat roadwith a speed v = 30 m/s the quarter car model has a stiff ratio of approximately 200

14 G. RILL
Figure 5. Coulomb dry friction model and enhanced brake torque model.
Figure 6. Spring characteristics of bushing B.
Figure 7. Top-mount and damper characteristics.
which indicates a mildly stiff system. But running on rough road and or performinghard braking maneuvers the bush forces, the longitudinal tire force and the brakingtorque show an extreme nonlinear behavior which demand stiff differential equationsolvers.

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 15
Table I. Quarter car model data.
Height of chassis mass center 0.600 m
X -pos. of knuckle center rel. to chassis 0.050 m
Z -pos. of knuckle center rel. to chassis −0.275 m
X -pos. of wheel center rel. to chassis 0.000 m
Z -pos. of wheel center rel. to chassis −0.300 m
Chassis mass (quarter vehicle) 300.000 kg
Knuckle mass 30.000 kg
Wheel mass 15.000 kg
Knuckle moment of inertia 2.500 kgm2
Wheel moment of inertia 1.200 kgm2
X -pos. knuckle bush rel. to chassis 0.400 m
Z -pos. knuckle bush rel. to chassis −0.310 m
X -pos. spring at knuckle rel. to chassis 0.075 m
Z -pos. spring at knuckle rel. to chassis −0.250 m
X -pos. spring at chassis 0.100 m
Z -pos. spring at chassis −0.050 m
Spring preload 3637.000 N
X -pos. damper at knuckle rel. to chassis 0.025 m
Z -pos. damper at knuckle rel. to chassis −0.280 m
X -pos. damper at chassis 0.050 m
Z -pos. damper at chassis −0.020 m
Damper friction 50.000 N
Figure 8. Spring and tire characteristics.
4.3. STANDARD IMPLICIT EULER FORMULAS
The implicit Euler formula for a system of first order differential equations
x = f (x) (54)

16 G. RILL
is given by
xk+1 = xk + h f (xk+1), (55)
where h is the integration step size, and xk , xk+1 denote the state vector at time tand t + h. Applying the implicit Euler formalism to each system of the quarter carmodel results in
K (yk+1) yk+1 = K (yk+1) yk + h zk+1 ,
M(yk+1) zk+1 = M(yk+1) zk + h q(yk+1, zk+1, �k+1, sk+1) (56)
βk+1W = βk
W + h �k+1W ,
�W �k+1W = �W �k
W + h qW(yk+1, zk+1, �k+1
W
), (57)
sk+1 = sk + h g(yk+1, zk+1, sk+1) . (58)
Solving this set of nonlinear equations for yk+1, zk+1, βk+1W , �k+1
W and sk+1 wouldprovide an asymptotically stable solution but would cost a large number of opera-tions performing one single integration step. As the Euler approach delivers onlysolutions with an accuracy in the magnitude of the step size, comparatively smallstep sizes are needed in order to achieve acceptable results. To make it simple:the implicit Euler approach spends most of its effort to achieve a poor but stablesolution for large step sizes.
In vehicle dynamics the integration step size is bounded anyway, h ≤ hmax. Inreal time applications for example the maximum integration step size is determinedby the communication step size. Usually one millisecond is used, hmax = 1 ms. Onrough roads the step size is limited by the sample rate of the road irregularities. Iffor instance the vehicle is driving with a speed of v = 30 m/s and we want to samplethe road at least with the length of a passenger car tire contact area, �x ≈ 0.12 mthen, the maximum step size is given by hmax = �x/v = 4 ms. Hence, integrationalgorithms which are developed to run with large step sizes are usually not practicalin vehicle dynamic applications.
4.4. A MODIFIED IMPLICIT EULER APPROACH
4.4.1. Integrate and Calculate
The dynamics of the wheel rotation �k → �k+1 and the dynamics of externalstate variables sk → sk+1 usually is much faster than the dynamics of the vehicleframe work yk → yk+1 and zk → zk+1. Then, the generalized torque qk+1
W and thefunction gk+1 can be approximated by a truncated Taylor expansion
qW(yk+1, zk+1, �k+1
W
) ≈ qW(yk, zk, �k
W
) + ∂qW
∂�W
(�k+1
W − �kW
) + ... ,
g(yk+1, zk+1, sk+1) ≈ g(yk, zk, sk) + ∂g
∂s( sk+1 − sk ) + ... , (59)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 17
where small and all higher order terms were neglected. Using this approximationthe implicit Euler formulas Equation (57) and Equation (58) can be written as
�k+1W = �k
W + h
(�W −h
∂qW
∂�W
)−1
qW(yk, zk, �k
W
),
βk+1W = βk
W + h �k+1W , (60)
sk+1 = sk + h
(E − h
∂g
∂s
)−1
g(yk, zk, sk), (61)
where E denotes a matrix of identity of the same size as the Jacobian ∂g/∂s.If the equations Equation (60) and Equation (61) are solved first, then the new
states of the wheel rotation �k+1 and the external variables sk+1 are known andcan be used to calculate the vector of generalized forces and torques for the vehicleframework.
4.4.2. Displacement Prediction
Similar to Equation (59) the implicit state of the vector of generalized forces andtorques for the vehicle framework can be approximated by
q(yk+1, zk+1, �k+1, sk+1) ≈ q(yk +h K(yk)−1zk, zk, �k+1, sk+1)
+ ∂q
∂y
(yk+1 − yk − h K(yk)−1zk
)+ ∂q
∂z(zk+1 − zk) + ... , (62)
where again all higher order terms were neglected and yk+1E = yk +h K
(yk
)−1zk
is the explicit Euler solution of the kinematic differential equation Equation (48)and acts here as a first approximation to the yet unknown implicit position yk+1
o .If force elements have strong nonlinearities this displacement prediction improvesthe stability because the derivatives are taken at the estimated implicit position yk+1
Einstead of the momentary position yk .
As the bodies in the vehicle framework do not change their position very rapidlythe implicit states of the kinematic and the mass matrix can be approximated bytheir explicit values
K (yk+1) ≈ K (yk) M(yk+1) ≈ M(yk) . (63)
If trivial generalized speeds y = z are defined then, the kinematic matrix is equalto the matrix of identity and does not depend on generalized coordinates at all. Thisis the case within this quarter car model.

18 G. RILL
By using the first equation in Equation (56) the second term on the right side ofthe equation Equation (62) can be simplified to
∂q
∂y
(yk+1 − yk − h K(yk)−1zk
) = h∂q
∂yK(yk)−1(zk+1 − zk) (64)
and Equation (56) results in
zk+1 = zk + h M−1I q(yk +h K(yk)−1zk, zk, �k+1, sk+1)
yk+1 = yk + h K (yk)−1 zk+1 ,
(65)
where the ‘implicit’ mass matrix is given by
MI = M(yk) − h∂q
∂z− h2 ∂q
∂yK(yk)−1 (66)
The modified implicit Euler formulas Equations (60) (61), and (65) are basedon first approximations to the implicit state of the right hand side of the differentialequations. Hence, the derivatives needed in these formulas can be calculated witha similar or an equal approximation level.
4.5. DERIVATIVES
4.5.1. Approximation Level
According to Equation (18) the vector of generalized forces and torques consists ofa part qi containing weight and inertia forces and the part qa collecting the appliedforces and torques.
During normal vehicle motions the weight and inertia forces qi do not changerapidly. Then, the partial derivatives in Equation (66) can be approximated by
∂q
∂z≈ ∂qa
∂z= ∂
∂z(qaFB + qaFS + qaFD + qaFT TT + qaTD + qaTB ), (67)
∂q
∂y≈ ∂qa
∂y= ∂
∂y(qaFB + qaFS + qaFD + qaFT TT + qaTD + qaTB ). (68)
4.5.2. Standard Force Elements
The contribution of force elements to the vector of generalized forces and torques iscalculated via the virtual power Equation (21). Using the definition of generalizedspeeds Equation (10) the contribution of forces like the bush forces and the springforce can be written as
qaF =(
∂ u
∂z
)T
F(u) =(
∂ u
∂ y
∂ y
∂z
)T
F(u) =(
∂ u
∂ yK −1
)T
F(u) , (69)

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 19
where u denotes the displacement of the force F , z is the vector of generalizedspeeds, y is the time derivative of the vector of generalized coordinates and K isthe kinematic matrix. For the quarter car model the kinematic matrix is equal to thematrix of identity, K = E .
While taking one integration step from yk to yk+1 in vehicle models the kinematicmatrix K and the direction vector (∂ u/∂ y) will not change very much. Hence, thepartial derivative of qaF with respect to y results in
∂qaF
∂y=
(∂ u
∂ yK −1
)T∂ F(u)
∂u
∂u
∂y. (70)
The time derivative of the force displacement
u = d
dt(u(y)) = ∂u
∂yy (71)
delivers by simple inspection
∂ u
∂ y= ∂u
∂y. (72)
As ∂ u/∂ y is given by the kinematics of the force element and K comes from thedefinition of generalized speeds only the force derivative with respect to the forcedisplacement ∂ F/∂u is needed to calculate the contribution of a force element to thepartial derivative of the vector of generalized forces and torques. Usually nonlinearforce characteristics are defined by lookup tables which are interpolated by simplelines or cubic splines. Then, calculating the force F(u) and the derivative ∂ F(u)/∂ucosts only slightly more than the pure evaluation of the force.
4.5.3. Global Derivatives
The brake torque TB = TB(ω) was modelled by an enhanced dry friction model.Its contribution qaTB to the vector of generalized forces and torques is given byEquation (45). To calculate the partial derivative ∂qaTB /∂y which can be donesimilar to Equation (70) the derivative dTB/dω is needed. As the braking torquewas modelled quite simply in the neighborhood of ω = 0, jumps in the derivativewill occur.

20 G. RILL
The need for this derivative comes from the truncated Taylor expansion Equa-tion (62) which was applied to generate an approximation to the implicit stateqak+1 of the vector of generalized forces and torques. If we replace the ‘exact’derivative
dTB
dω=
⎧⎪⎨⎪⎩0, ω < ω1
−dN , ω1 ≤ ω ≤ ω2
0, ω > ω2
(73)
by the ‘global’ derivative
dTB
dω≈ TB(ω) − TB(0)
ω − 0= TB − T st
B
ω(74)
a smooth transition can be achieved, Figure 9.Using the ‘global’ derivative means that instead of a Newton step a secant step
is used to get an approximation of qak+1. For characteristics with sharp bends asingle secant step generates a better approximation than a single Newton step andthus increases the stability of the modified Euler formulas.
5. Results
5.1. OVERALL PERFORMANCE
To test the performance of the modified Euler algorithm a simple driving and brakingmanoeuver on a rough road was simulated. The road profile and the time history ofthe driving and the maximum braking torque are plotted in Figure 10.
Some results are shown in Figure 11. The vehicle starts with a speed ofv ≈ 70 km/h. By a ramp shaped drive torque it is accelerated to v ≈ 106 km/h. Ahard braking manoeuver reduces the speed to v ≈ 25 km/h. The maximum brake
Figure 9. Enhanced brake torque model and derivatives.

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 21
Figure 10. Road profile ξ (x) and torques TD(t) and T mxB (t).
Figure 11. Simulation results: modified euler compared to gear.
torque T mxB = 1200 Nm is large enough to lock the wheel in an instant. The brake
torque model discussed in section 3.6 automatically generates the appropriate braketorque |TB | ≤ T mx
B which is needed to keep the wheel locked. The drive torquehas nearly no influence to the knuckle rotation. The strong reaction of the knucklerotation to the brake torque is typical for a trailing arm rear axle suspension and in-dicates the contribution to the anti-dive reaction of the chassis. Due to the different

22 G. RILL
Figure 12. Damper displacement: – with friction, – without friction.
bush compliances the bush displacements in the vertical direction are significantlysmaller than in the longitudinal direction. The implicit displacement predictiondescribed in Section 4.4.2 improves and stabilizes the stiff parts of the bushmotion.
The modified implicit Euler algorithm was applied with an integration step sizeof h = 2 ms. Figure11 also shows the results of a Gear integration where theaccuracy was controlled by an absolute and relative error tolerance of εabs = εrel =10−6. Even in critical situations, like applying and releasing the brake, Euler andGear solutions are in very good conformity.
5.2. DAMPER FRICTION
In Figure 12 the displacement of the pure damper element is plotted versus timeusing a damper element with and without friction. To emphasize the effect of thedamper friction the road roughness was switched off and the maximum frictionforce was increased from Fmx
F = 50 N to FmxF = 200 N .
The modified implicit Euler algorithm perfectly handles the dry friction modeldeveloped in section 3.3. During normal driving and accelerating the friction forceis large enough to suppress any damper motion. The brake torque generates a largeknuckle rotation which results in a significant damper displacement. After finishingthe driving and braking maneuver the vehicle quickly returns to the equilibriumposition. Due to the dry friction in the damper element the equilibrium positionsof the damper displacement at the beginning (t = 0 s) and at the end (t = 8 s) arenot the same.
6. Conclusion
In this paper the implicit Euler algorithm is tailored to the specific problems invehicle dynamics. A first version of this approach was already used to achieve realtime performance for a full truck model, [8]. In particular the modifications within

A MODIFIED IMPLICIT EULER ALGORITHM FOR SOLVING VEHICLE DYNAMIC EQUATIONS 23
the implicit Euler algorithm pay off for large vehicle systems [6]. Since severalyears the presented algorithm is used successfully within VeDynA a commercialtool in Vehicle Dynamics [13]. VeDynA is embedded into the environment ofMATLAB/SIMULINK and it is widely used for off-line and real time applications,c.f. [1].
The enhanced quarter car model used here is simply enough to explain all themodification details but still is representative for complex vehicle models. At firstthe implicit Euler formulas are applied to each subsystem of the overall vehiclemodel. Then, the fully implicit Euler is replaced by a first order approximationwhere only dominant terms in the Jacobian are taken into account. In consequence,all derivatives are calculated in a first approximation level only. An implicit displace-ment prediction and global derivatives used to smoothen sharp bends in nonlinearforce or torque characteristics improve the stability of the algorithm. The latter alsosimplifies the modelling of dry friction.
As shown here, the modified implicit Euler algorithm achieves a good accuracyeven for comparatively large step sizes. Hence, the run time performance of detailedvehicle models is excellent. In general there is no need to simplify the vehicle modelin order to achieve real time performance.
References
1. Butz, T., von Stryk, O., Chucholowski, C., Truskawa, S. and Wolter, T.-M., ‘Modeling techniques
and parameter estimation for the simulation of complex vehicle structures’, in High-PerformanceScientific and Engineering Computing. Proceedings of the 3rd International FORTWIHR Con-ference, Erlangen, 12–14. Marz 2001, Breuer, M., Durst and F., Zenger, C. (eds.), Lec-
ture Notes in Computational Science and Engineering 21. Springer Verlag, 2002, S. 333–
340.
2. Hirschberg, W., Rill, G. and Weinfurter, H., ‘User-appropriate tyre-modelling for vehicle dy-
namics in standard and limit situations’, Vehicle System Dynamics 38(2), 2002, 103–125. Lisse:
Swets & Zeitlinger.
3. van der Jagt, P., The Road to Virtual Vehicle Prototyping; new CAE-models for accelerated
vehicle dynamics development, PhD-Thesis, Tech. Univ. Eindhoven, Eindhoven 2000, ISBN
90-386-2552-9 NUGI 834.
4. Kosak, W. and Reichel, M.: ‘Die neue Zentral-Lenker-Hinterachse der BMW 3er-Baureihe’,
Automobiltechnische Zeitschrift, ATZ 93, 1991, 5.
5. Van Oosten, J.J.M. et al., Tydex Workshop: Standardisation of Data Exchange in Tyre Testing
and Tyre Modelling, Proc. 2nd Int. Colloquium on Tyre Models for Vehicle Dynamic Analysis,
Swets & Zeitlinger, Lisse, 1997, 272–288.
6. Reindl, N. and Rill, G., ‘Modifikation von Integrationsverfahren fur rechenzeitoptimale Sim-
ulationen in der Fahrdynamik, Z. f. angew’, Math. Mech. (ZAMM) 68, 1988, 4, S. T107–
T108.
7. Rauh, J., ‘Virtual development of ride and handling characteristics for advanced passenger cars’,
Vehicle System Dynamics 40(1–3), 2003, 135–155.
8. Rill, G., Fahrdynamik von Nutzfahrzeugen im Daimler-Benz Fahrsimulator, In: Berechnung im
Automobilbau, VDI-Bericht 613. Dusseldorf: VDI-Verlag, 1986.
9. Rill, G., Simulation von Kraftfahrzeugen, Vieweg-Verlag, Braunschweig/Wiesbaden, 1994.

24 G. RILL
10. Rill, G., Modeling and Dynamic Optimization of Heavy Agricultural Tractors’, in 26th Interna-
tional Symposium on Automotive Technology and Automation (ISATA). Croydon: Automotive
Automation Limited 1993.
11. Rill, G., ‘Vehicle modelling for real time applications’, RBCM - J. of the Braz. Soc. MechanicalSciences XIX(2), 1997, 192–206.
12. Scientific Subroutine Library. Fujitsu Limited, Tokyo, Japan 1998.
13. www.tesis.de.