Embed Size (px)
Citation preview

ION GNSS+ 2018
Sept. 24-28 2018
Miami, Forida
A multi-sensor autonomous integrity
monitoring approach for railway and
driver-less cars
Pietro Salvatori1, Alessandro Neri1,2, Cosimo Stallo1
1 Radiolabs, Rome, Italy
2 University of ROMA TRE, Rome, Italy

Contents
• Rail & Road Accuracy and Integrity Requirements
• EM Scenario
• Space Diversity based Multipath Detection & Exclusion
• GNSS vs. Odometry based Multipath Detection & Exclusion
• Experimental results
• Conclusions

RAIL - SAFETY CRITICAL Requirements
GNSS Functionality Alert Limit Accuracy
VB detection VITAL 1 m 25 cm
VB detection NON
VITAL
5 m 125 cm
Track discrimination 2 m 50 cm
ERTMS/ETCS
Safety Integrity Level SIL-4
THR <10-9 [hazard/(h x Train)]
RBC 160 km/h
Train 2 Train 1
Section 1 Section 2 Section 3 Section 4Balise A Balise B Balise C Balise DTrack Circuit
Permitted Speed

ROAD - SAFETY CRITICAL Requirements
KPI Value
Lateral ALERT LIMIT < 25 cm
Longitudinal ALERT LIMIT 2 m
Speed accuracy ?
Trajectory handshake latency <100 msec
Status message latency <10 msec
Status message loss rate < 10-6
Status message rate > 10 Hz
Vehicles and Road users
• Position, speed
• acceleration
• direction (heading)
• Yaw rate
Static obstacles
• Position
Infrastructure
• High Accuracy
Digital map
From other sources
• traffic
• weather information
0Driver
Assistance
No
Automation
12 3
45
Partial
Automation
Conditional
AutomationHigh
Automation
Full
Automation
HUMAN DRIVER Automated Driving System ELECTRONIC
HORIZON

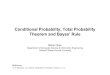
Railway EM scenario
Yellow: Unconstrained RTK (GPS)
Red: IMU+GPS• MULTIPATH is a Major Hazard

The EM scenario
Multipath is a
Major Hazard
Trains and Cars operate in the same EM Environment
MITIGATIONS
Camera Visible Horizon
Signal Domain
Correlation Domain
Measurement Domain
Position Domain (ARAIM)
Credits: Prof. Per Enge
5
-50
10
2015
25 RAIL

Enhanced Odometers
Ref. B. Allotta, et Al. (2012):Evaluation of odometry algorithm performances using a railway vehicle dynamic model, VehicleSystem Dynamics: Int. Journal of Vehicle Mechanics and Mobility, 50:5, 699-724
TACHOMETERd
dt
Acceleration Criterion
State Machine for velocity Estimation
Axle angular speed
PositionIncrement
Velocity
GYRO
ACCELEROMETERGravity
CompensationACCKF
GYROKF
OrientationReset
( ) ( ) ) ( )(en
OD k k k S ktv v t tt
zero mean
NARROW BAND
Gaussian process
zero mean
WHITE
Gaussian
Process
• Velocity measurement model

GNSS vs. ODOMETER
Difference between GNSS and ODOMETER velocity estimates

GNSS vs. ODOMETER
Difference between GNSS and ODOMETER velocity estimates

The Track constraint
• The location of the train is completely determined by its MILEAGEfrom the terminus station
Two unknowns:• Train mileage• Rx clock error
Virtual Balise
ai
li
VBR
Track Parametric Equations
( )Rx Rx sX X
Train mileage
Rx
Rx
s
c t
H
Sat
T
x NRx
Rs
E 1
X
Track Constrained Positioning

Virtual Track Concept
Reference path
Lateral offset
Virtual Track
virtual
track
q
s
(sVT ,qVT )
(s, q)
Nominal
path
Planned
path
Use of Imaging to estimate the lateraL OFFSET
Vehicle Position determined byIts curviinearcoordinates basedon lane middle line

Space Diversity Multipath Resilience
GPS BEIDOUBy fact:• Best Engineering practices
do suggest the use of• 2 independent Rx
Rx2 Rx1
2 2
p p
Rx Rxr e1 1
p p
Rx Rxr e
2 2 2 2,
p p q q
p q Rx Rx Rx RxDD
p-th
satellite
location
q-th
satellite
location
Double Difference
• Pseudorange Double Difference equations
2 2, / 1ˆ ˆ ˆ, q p
p q k k Rx Rxqp DD b e eζ
2 2, ,, q p
p q Rx Rx p qDD b e e
11 2 1 2 22 1
,
Rx Rx Rx Rx Rx Rx Rx Rx
pp p q q qp qq pn n n n
Thermal noise Multipath error
• Pseudorange difference Multipath Indicator

Space Diversity Multipath Resilience
GPS BEIDOUBy fact:• Best Engineering practices
do suggest the use of• 2 independent Rx
Rx2 Rx1
2 2
p p
Rx Rxr e1 1
p p
Rx Rxr e
2 2 2 2,
p p q q
p q Rx Rx Rx RxDD
p-th
satellite
location
q-th
satellite
location
Double Difference
• DOPPLER Double Difference equations (negligible rotations)
,p q Dq
DOP
p DD f ζ
• DOPPLER difference Multipath Indicator
,, ,
n
p q
MP
p Dq D qp DDD f DDDD f f
Thermal noiseMultipath error

ODOMETRY Based Multipath Resilience
GPS BEIDOUBy fact:• Best Engineering practices
do suggest the use of• 2 independent Rx
Rx2 Rx1
2 2
p p
Rx Rxr e1 1
p p
Rx Rxr e
2 2 2 2,
p p q q
p q Rx Rx Rx RxDD
p-th
satellite
location
q-th
satellite
location
Double Difference
• DOPPLER – ODOMETER Difference equations
, ,
ODO
p q D p q Dq
ODO
p SD f SD f ζ
• DOPPLER – ODOMETER Multipath Indicator
, ,,,
ODO MP
p q
n
p qp q DD p q D DSD Sf fS f f DD SD
, ,,p
pC
S
ODO p p
D Rx Rxp
R
at DOp
xt
O
Sa
ff
c
v e ev e
v

a. Initialize the set HealthyS of healthy satellites to the set of
visible satellites with elevation greater than the elevation
mask.
b. Repeat
for each satellite in HealthyS compute p
c. Select the satellite with the largest p
ˆHealthy p
p Sp Arg Max
d. If p exceeds a predefined threshold
remove p from the healthy set HealthyS
and mark the satellite as unreliable.
until p and HealthyS is non empty.
Multipath Detection and Exclusion
• Multipath detection is performed by thresholding |p|
• To avoid masking of SIS of weak multipath by SISs with strongerMultipath an the iterative procedure that removes at each iteration the effects produced by those satellites whose signal is already classified as faulty is adopted
Iteration #1

a. Initialize the set HealthyS of healthy satellites to the set of
visible satellites with elevation greater than the elevation
mask.
b. Repeat
for each satellite in HealthyS compute p
c. Select the satellite with the largest p
ˆHealthy p
p Sp Arg Max
d. If p exceeds a predefined threshold
remove p from the healthy set HealthyS
and mark the satellite as unreliable.
until p and HealthyS is non empty.
Multipath Detection and Exclusion
• Multipath detection is performed by thresholding |p|
• To avoid masking of SIS of weak multipath by SISs with strongerMultipath an the iterative procedure that removes at each iteration the effects produced by those satellites whose signal is already classified as faulty is adopted
Iteration #2

a. Initialize the set HealthyS of healthy satellites to the set of
visible satellites with elevation greater than the elevation
mask.
b. Repeat
for each satellite in HealthyS compute p
c. Select the satellite with the largest p
ˆHealthy p
p Sp Arg Max
d. If p exceeds a predefined threshold
remove p from the healthy set HealthyS
and mark the satellite as unreliable.
until p and HealthyS is non empty.
Multipath Detection and Exclusion
• Multipath detection is performed by thresholding |p|
• To avoid masking of SIS of weak multipath by SISs with strongerMultipath an the iterative procedure that removes at each iteration the effects produced by those satellites whose signal is already classified as faulty is adopted
Iteration #3

Multipath in rail environment
• Line length: 120 km
• Physical Balises: about 500
• Track AreaAugmentation Network
3 RIMs equipped with 2 GPS receivers each
• PONTREMOLESE line
• Trains:
• 2 Ale.642 tractions equipped with 2 GPS receivers each
• Track Database based on RTK positioning survey

Multipath in rail environment
08/02/2016
• Line length: 120 km
• Physical Balises: about 500
• Track AreaAugmentation Network
3 RIMs equipped with 2 GPS receivers each
• PONTREMOLESE line
• Trains:
• 2 Ale.642 tractions equipped with 2 GPS receivers each
• Track Database based on RTK positioning survey
• Challenging environment w.r.t. multipath
• Tunnels
• Sky occlusions

Results: Doppler Double Diff. (2 Rx)
OFF ON

Results: Odometry based FDE
OFF ONOFF ON

Results: Doppler Double Diff. + Odometry
OFF ONOFF ON

Results
2oo2 Logic: The two estimates of the train mileage provided by the two receivers are
considered to be valid if the magnitude of their difference falls below a threshold
FDE OFF
2oo2Logic
FDE OFF

Results
2oo2 Logic: The two estimates of the train mileage provided by the two receivers are
considered to be valid if the magnitude of their difference falls below a threshold
FDE ON
2oo2Logic
FDE ON

2oo2 Performance
2 2
2 10 1 22 2 2 2
1 2 1 2
ˆ ˆ ˆs s s
(1) ( 2)
(1) (2)
0 2 1/ , ,ˆ ˆ ˆPr , , ,
i j
GSS
i jMI s H HP s s AL s s s H H
(1) ( 2)
(1) (1)
, , , ,
/ ,
1 1
2 22 2i j
Norm Norm
i j i j i j i jMI
GSS H H
AL ALP erfc erfc
(1) ( 2)
(2) (2)
, , , ,
/ ,
1 11
2 22 2i j
Norm Norm
i j i j i j i jMD
GSS H HP erfc erfc
(1) ( 2)
(1) ( 2) (1) ( 2)
(1) (2)
/ , , ,0 0
( ) Pr 0, 0i j i j
h hHMI GSS
GSS i j MI s H H H Hi j
P s FD FD P P
• O2O Mileage linear combination
11
1,i
2
2
2, j
• Let
• Then Misleading Information Probability is

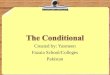
Results: Doppler Double Diff. + Odometry
Doppler DD
ODO
OFF
Doppler DD + ODO

Conclusions
• EXPLOITATION of the two GNSS receivers of independent manufacturer usually deployed to reduce HW/SW Hazards allows to increase location AVAILABILITY even with single constellation
• GEOREFERENCED KNOWLEDGE of the railway is not essential when doppler are compared (pseudorange comparison requires a guess of the baseline between the receivers)
• ODOMETER- GNSS DOPPLER comparison is an effective means to face Multipath even when just one receiver is available
• COMPARISON of the positions provided by two receivers dramatically improves resilience.
• The proposed Multipath Detection & Exclusion is fully
COMPATIBLE with other means to mitigate multipath.

We recognize the contribution of the ERSAT-GGC project, which has received
funding from the European GNSS Agency under the European Union’s Horizon 2020
research and innovation programme, under grant agreement No 776039
Thank you for your attention