Embed Size (px)
Citation preview

Engineering Structures 41 (2012) 108–117
Contents lists available at SciVerse ScienceDirect
Engineering Structures
journal homepage: www.elsevier .com/locate /engstruct
A numerical model of the structural behavior of buckling-restrained braces
F. López-Almansa a,⇑, J.C. Castro-Medina b, S. Oller c
a Technical University of Catalonia, Architecture Structures Department, Avda. Diagonal 649, 08028 Barcelona, Spainb Technical University of Catalonia, Department of Geotechnical Engineering and Geosciences, Campus Nord UPC, 08034 Barcelona, Spainc Technical University of Catalonia, Strength of Materials and Engineering Structures Department, Campus Nord UPC, 08034 Barcelona, Spain
a r t i c l e i n f o a b s t r a c t
Article history:Received 5 October 2011Revised 14 February 2012Accepted 26 March 2012Available online 26 April 2012
Keywords:Energy dissipatorsBuckling-restrained bracesPassive controlNumerical simulationDamage modelPlasticity
0141-0296/$ - see front matter � 2012 Elsevier Ltd. Ahttp://dx.doi.org/10.1016/j.engstruct.2012.03.045
⇑ Corresponding author. Tel.: +34 93 4016316, +34016320.
E-mail address: [email protected] (
This work presents a numerical model of the cyclic structural behavior of dissipative buckling-restrainedbraces, commonly used as an alternative to classical concentric braces for seismic protection of buildingframes and other structures. Such devices are usually composed of a slender steel core embedded in a stock-iest casing that is intended to prevent its buckling when it is under compression. The casing is made either ofmortar or steel, and a sliding interface is interposed between the core and the casing to prevent excessiveshear stress transfer. The behavior of the steel core is described by a damage and plasticity model; thebehavior of the mortar casing is described by an isotropic damage model and the sliding behavior of theinterface is described by a contact penalty model. These three models are implemented in the Abaqus soft-ware package following an explicit formulation. The ability of this algorithm to reproduce the cyclic behav-ior of buckling-restrained braces is verified in a number of representative yet simple situations. Theaccuracy of the proposed model is checked by comparison with experimental results; a satisfactory agree-ment is obtained. Preliminary conclusions are issued and further research needs are identified.
� 2012 Elsevier Ltd. All rights reserved.
1. Introduction
Energy dissipators are a convenient option for earthquake-resistant design of buildings and other civil engineering construc-tions since these devices absorb most of the input energy thusprotecting the main structure from damage even under strong seis-mic motions [17,37]; many applications have been reported [24].Several types of devices have been proposed; those based onplastification of metals (commonly termed as hysteretic) are sim-ple, economical and reliable while have shown repeatedly theirusefulness. Among them, the buckling-restrained braces are oneof the dissipators that have been mostly used, mainly for seismicprotection of building frames [43,11]. They consist of slender steelbars connected usually to the frame to be protected either like con-centric diagonal braces or like concentric chevron braces (as shownby Fig. 1a). Under horizontal seismic excitations, the inter-storydrift motion generates axial strains in such steel bars beyond theiryielding points. The buckling of these core bars is prevented byembedding them in a stockiest encasing; such casing is usuallycomposed either of steel elements [18,41] or of mortar coated withsteel (see Fig. 1b). Some sliding interface between the steel coreand the surrounding material is required to prevent excessive
ll rights reserved.
4 60 6807733; fax: +34 93
F. López-Almansa).
shear stress transfer, since it would reduce the longitudinal stressin the core thus impairing the energy dissipation capacity. As well,that interface involves some clearance between the core and themortar; such gap is required to allow the Poisson expansion ofthe core during compression.
The buckling-restrained braces possess several relevant advan-tages compared to other hysteretic devices:
� These dissipators constitute themselves a bracing system andno additional braces are required to connect each device tothe main frame.� Since the dissipative part of the device can encompass near the
whole length of the brace, the required strain is rather low.Therefore, the plastic excursions are moderate; as the degreeof plastification is uniform along the whole body of the core,expectedly the fatigue resistance will be high.� A relevant experience is available since a number of individual
and sub-assemblage tests have been carried out [41,7,22,38,42,21,12,25] and many realizations have been reported, mostlyin Japan [18], Taiwan [41], Canada [39] and the United States[7]. Preliminary versions of design codes have been proposed[19,20,31] and many references about design procedures areavailable [38,42,15,6,34,9].� The ratio between the dissipated energy and the added material
is the highest in the comparative devices [28]; such addedmaterial comprises the dissipators, the rest of the bracing sys-tem and the connections.

(a) Protected building frames (b) Detail of a device
Fig. 1. Buckling-restrained braces.
F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117 109
In spite of the aforementioned relevant existing backgroundabout the buckling-restrained braces, there are still some openquestions dealing mainly with the numerical modeling of the buck-ling behavior of these devices. The buckling design of the mortar-steel coating is based usually in simplified second-order formula-tions [7,42] whose parameters usually are not selected from the ac-tual characteristics of the device but mainly from semi-empiricalconsiderations; hence, such models are not highly accurate andmight yield unsafe results. In Refs. [29,30], approximate expressionsof the critical axial force and maximum bending moment in the cas-ing are derived in terms of the actual axial force and the initialeccentricities the core and of the casing; the accuracy of this formu-lation is checked by comparison with experimental results. Ref. [10]presents a similar study for buckling-restrained braces whose slid-ing interface consists of a small air gap. In that work, a finite elementmodel of the cyclic behavior of the considered devices is derived;this model is implemented in the computer program Abaqus [1].The von Mises yielding criterion was considered in the steel coreand restraining members; the cyclic effects were described by acombined isotropic and kinematic hardening model. The behaviorof the concrete was assumed to be elastic. The sliding interaction be-tween the steel core and the restraining members was modeled as ahard contact behavior, allowing separation of the interface in ten-sion and no penetration in compression; a friction coefficient equalto 0.1 was adopted to simulate greasy steel interfaces.
Apart from these rather simplified models, an accurate andcomprehensive numerical model of the coupled nonlinear behaviorof all the involved elements (steel core, casing and sliding inter-face) has not yet been proposed. This lack hinders the deep under-standing of the structural behavior of these devices, compels thatthe design is based on uncertain and over-conservative approachesand prevents the proposal of innovative and daring solutions. Thiswork aims to close this gap by proposing an accurate and reliablenumerical finite element model of the structural behavior of buck-ling-restrained braces composed of a steel core surrounded by amortar and steel casing. This model considers the joint behaviorof the involved materials (inner and outer steel, mortar and slidinginterface) and accounts for the partial sliding between the core andthe encasing mortar. The buckling behavior of the steel core isdescribed by a coupled damage and plasticity model formulatedfor large displacements; the behavior of the mortar casing is de-scribed by an isotropic damage model and the sliding behavior ofthe interface is described by a contact penalty model. These threemodels are jointly implemented in the Abaqus software package
[1] following an explicit formulation; the resulting combinedmodel is aimed to describe the structural behavior of buckling-re-strained braces and constitutes the main contribution of this work.The ability of the three individual models to simulate the corre-sponding behaviors and the capacity of the combined model toreproduce the cyclic behavior of buckling-restrained braces areverified in a number of simple yet representative situations. Theaccuracy of the proposed algorithm is checked by comparison withtwo sets of available experimental results [29,25]; satisfactoryagreements are obtained. Arising from these studies, relevant con-clusions are issued and further research needs are identified.
This work belongs to a research project that aims to promotethe mass use of patent-free buckling-restrained braces for seismicprotection of buildings in developing countries. The research ap-proach consists of: (i) designing, producing and testing individuallyshort length dissipators (about 400 mm long) [27,30], (ii) takingprofit of the gained experience to design, produce and test individ-ually larger prototype devices (near 3000 mm long) [29], (iii) deriv-ing a simplified model of the buckling behavior of these devices[29], (iv) developing an accurate numerical model of their struc-tural behavior, (v) designing, producing and testing on sub-assem-blies a number of full scale dissipators and (vi) performing anumerical parametric study about the seismic efficiency of suchdevices. The first three stages are completed while the last threeones are still in progress; this paper deals mainly with the fourthstage. It is expected that the proposed model will allow designingdevices that are more slender than the currently available ones;such devices might be less costly and, hence, more suitable formass use in developing countries.
2. Isotropic damage model for the mortar casing
The behavior of the mortar casing is described by a triaxial iso-tropic damage model. Damage models [23] consist basically ofdescribing the degradation of the material by a scalar damage in-dex d ranging between 0 (no damage) and 1 (destruction):
r ¼ ð1� dÞ r0 ¼ ð1� dÞ E0 : e ð1Þ
In this constitutive relation tensors r and e represent stressesand strains, respectively; r0 is the undamaged stress tensor andE0 contains the undamaged values of the constitutive parameters.Eq. (1) shows that the undamaged behavior is described by a linearelastic multiaxial model; damage arises when F(s, r) = G(s) � G(r)

110 F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117
ceases to be negative, where r is the damage threshold and s is anenergy norm. Function G governs the evolution of the damagethreshold r; an exponential law is chosen [23]:
GðrÞ ¼ 1� rr0
eC 1� r
r0
� �ð2Þ
Since the degradation is irreversible, r decreases continuouslyafter its initial value r0 = ft/(E)½ [8] where E is the initial deforma-tion modulus and ft is the mortar tensile strength. C is a dimension-less positive parameter given by [35]:
C ¼G�f E
l�f 2t� 1
2
� ��1
ð3Þ
In this equation G�f ¼ Gf l� where Gf is the fracture energy perunit area and l⁄ is a characteristic length of the finite elements usedin the discretization [26]. The energy norm is defined accountingfor the different values of the compressive (fc) and tensile strengths[8] as:
s ¼ hþ 1� hfc=ft
� � ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffir0 : E�1
0 : r0
qð4Þ
In this definition h is a scalar variable ranging between 0 for tri-axial compression and 1 for triaxial tension [8]. The loading andunloading behavior is governed by the well-known Kuhn–Tuckerconditions [36]:
_l P 0 Fðs; rÞ 6 0 _lFðs; rÞ ¼ 0 ð5Þ
l is a damage consistency parameter given by _r ¼ _l.In the proposed formulation the damage problem is solved by
an iterative algorithm [8].The ability of this model to describe the nonlinear behavior of
mortar members is verified in the simple yet representative situa-tion described by Fig. 2. Fig. 2 shows a prismatic mortar rod that isclamped in one of their ends and undergoes imposed axial dis-placements in its other end.
The bar is 500 mm long and the cross-section is square with100 mm side; such stocky design (slenderness k = 34.64) preventsthe risk of relevant buckling. As shown by Fig. 2, the bar is discret-ized by 8-node hexahedron Lagrangian elements. The mainmechanical parameters of the mortar are: compressive strength39.92 MPa, tensile strength 3.99 MPa, Poisson’s ratio 0.2 and defor-mation modulus 17.52 GPa. The fracture energy per unit area isGf = 0.104 MPa and the characteristic length l� is equal to the sideof the finite element. The imposed displacements consist of tworamp functions with final amplitudes 0.8 and 0.08 mm in shorten-ing (compression) and in elongation (tension), respectively. Fig. 3shows the obtained results for the outer finite element; in Fig. 3and in the subsequent ones, positive values correspond to tensionand to elongation. Plots from Fig. 3 depict a regular behavior.
0.8 mm
0.08 mm
500 × 100 × 100 mm
Fig. 2. Mortar member under imposed axial displacements.
3. Damage and plasticity model for the steel core
The cyclic buckling behavior of the steel core is described by acoupled damage and plasticity model; such model is formulatedfor large displacements, yet keeping small strains, to describe thebuckling instability. The coupling between damage (stiffness deg-radation) and plasticity (permanent strains) has been previouslypointed out [3]. However, both issues are rather different and can-not be described with the same constitutive model; this work pre-sents a new formulation that considers jointly damage andplasticity. The coupling between them is only weak since each ofthese mechanisms has their own threshold functions, dissipationpotentials, and consistency factors while the coupling is estab-lished through the effective stresses �r; e.g. those distributed inthe effective area (1 � d) A, A being the total area. The damage isdescribed by the same model explained in the previous section.The damage initiates once the failure surface is reached; the plas-tic-damage behavior is governed by:
r ¼ ð1� dÞ�r ¼ ð1� dÞE0 : ee ð6Þ
In this constitutive relation ee is the elastic part of the strain.The plastic hardening can be described either by isotropic or
kinematic models [36]; the plastic behavior is governed by theclassical conditions:
Fð�r� g;qÞ ¼ f ð�r� gÞ � �f y 6 0 _c P 0 ð7Þ
In these expressions g is a hardening variable, q is an internal plas-tic variable, �f y is the updated yielding limit, f is the yielding surfacegiven by the multiaxial Von Mises criterion f ð�r� gÞ ¼ðffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
32 devð�r� gÞ : devð�r� gÞ
qÞ and c is a plastic consistency parameter
given by _ep ¼ _c @Fð�r�g;qÞ@�r where _ep is the plastic strain rate.
The coupling between plasticity and damage is established interms of the free Helmholtz energy:
wðe;rp;q; dÞ ¼ ð1� dÞw0ðeÞ � e : rp þ wpðrp;qÞ ð8Þ
rp is the plastic stress, w0 is the energy corresponding to theundamaged state (being given by w0 ¼ 1
2 e : E0 : e) and wp is a plasticpotential. This formulation provides the values of the plastic consis-tency parameter and the tangent plastic tensor:
_c ¼@f@r : @2w0
@z�@z : _e@f@�r : @2w0
@z�@z : @f@�r
� �� ck
@f@g : @f
@�rþ@f@q : h
� �
ET ¼ @2w0
@e� @e�@2w0@z�@z : @f
@�r
� �� @2w0
@z�@z : @f@�r
� �@f@�r : @2w0
@z�@z : @f@�r
� �� ck
@f@g : @f
@�rþ@f@q : h
� � ð9Þ
In these expressions ck is a kinematic hardening variable and his a vector given by q ¼ _ch.
-8 -6 -4 -2 0
-10
-8
-6
-4
-2
0
Forc
e (k
N)
Displacement (mm)
Fig. 3. Numerical simulation of the stress–strain behavior of mortar.

F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117 111
In the proposed formulation the damage and plasticity prob-lems are solved by a mapping return algorithm [8].
The ability of this model to describe the hysteretic behavior ofsteel members is verified in the simple representative situation de-scribed by Fig. 4. Fig. 4 shows a prismatic steel rod that is clampedin one of their ends and undergoes an imposed axial displacementlaw in its other end.
The bar is 76 mm long and the cross-section is square with19 mm side; as in the mortar bar (Fig. 2), such stocky design (slen-derness k = 27.71) prevents the risk of relevant buckling. As shownby Fig. 4, the bar is discretized by 8-node hexahedron Lagrangianelements. The steel type is S355 [13], whose nominal yieldingpoint and ultimate strength are 355 and 470 MPa, respectively;the deformation modulus is 210 GPa and the Poisson’s ratio is0.3. Both kinematic and isotropic hardening have been considered;the kinematic hardening has been assumed as HK = 21 GPa (E / 10)while the isotropic hardening has been assumed as HI = 21 GPa. Nodamage has been considered inside the model. The imposed dis-placements consist of a series of triangular waves with growingamplitudes ±0.25 Dy, ±0.5 Dy, ±0.75 Dy, ± Dy and ±5 Dy; Dy is theyielding displacement. Fig. 5 depicts the obtained hysteresis loops.Plots from Fig. 5a and b correspond to regular kinematic and iso-tropic plastic behaviors, respectively.
4. Penalty contact model for the sliding interface
The sliding behavior of the interface between mortar and con-crete is described by a penalty contact model [44]. The steel surfaceis considered as ‘‘penetrating master’’ while the mortar one is‘‘penetrated slave’’; the penetration is described with a penalty for-mulation by interposing a highly stiff spring between both sur-faces. In the finite element discretization the contact has to beestablished node-to-node. The ensuing minimum-distance prob-lem is solved by minimizing the total potential energy:
P ¼ 12
ZCðkng2
n þ ktg2t ÞdA ð10Þ
In this equation C is the contact surface and kn and kt are posi-tive normal and tangent penalty factors, respectively [8]. Scalars gn
and gt correspond to the normal and tangent directions, respec-tively, and are given by:
gn ¼ ðxm � XsÞns gt ¼Z t
t0k€u _fkdt ð11Þ
Vectors xm and xs represent the mortar and steel coordinates,respectively, and ns is a unit vector normal to the surface; €u isthe updated steel relative acceleration and _f is the updated convec-tive velocity. The contact and separation conditions are governedby the well-known Herz–Signori–Moreau conditions [44]:
± 5 Δy
76 × 19 × 19 mm
Fig. 4. Steel member under imposed axial displacement.
gn P 0 pn 6 0 gnpn ¼ 0 ð12Þ
pn represents the normal contact force:
pn ¼kz
kþ kzðkh�mgÞ ð13Þ
In this equation k is the equivalent spring constant, ke is thepenalty parameter (interposed spring constant), h is the gap be-tween both surfaces, m is the mass associated to the node, and gis the acceleration of gravity.
In the proposed formulation the contact problem is solved by aniterative algorithm [8].
The ability of this model to describe the sliding contact behavioris verified in a simple representative situation; it consists of a pris-matic steel core embedded in a mortar casing as described byFig. 6.
Fig. 6 depicts a square steel core with 10 mm side and asurrounding square mortar with 30 mm side; both elements are100 mm long. As shown by Fig. 6, the steel core and the mortarcasing have been discretized by 8-node hexahedron Lagrangianelements; noticeably, the contact between steel and mortar isnode-to-node. The sliding interface consists merely of an air gapbeing 0.12 mm wide. The steel type is S275 [13], whose nominalyielding point is 275 MPa and whose ultimate strength is410 MPa; the kinematic hardening has been assumed asHK = 20 GPa. The main mechanical parameters of the mortar are:compressive strength 39.92 MPa, tensile strength 3.99 MPa, Pois-son’s ratio 0.2 and deformation modulus 17.52 GPa; the fractureenergy per unit area is Gf = 0.104 MPa. In the contact model thefriction coefficient is j = 0.1, the directionality is isotropic andthere is no limit in the transfer of shear stresses. A transversal dis-placement is imposed to the core; it consists of a ramp functionreaching 0.25 mm, followed by a constant branch. Fig. 7 depictsthe obtained time history results of the transversal displacementof a pair of contact nodes. Fig. 7 shows that before the contactthe displacement of the mortar is zero and that after contact bothnodes remain together; noticeably, the contact behavior is prop-erly reproduced, without spurious vibrations.
5. Integrated model for the buckling-restrained brace
The models described in the previous three sections are jointlyimplemented in the Abaqus software package [1]; the subsequentdynamic problem is solved following an explicit formulation. Theresulting combined model is aimed to describe the overallstructural behavior of buckling-restrained braces and constitutesthe main outcome of this work. The explicit formulation is chosenbecause the stiffness matrix is ill-conditioned as a result of thepenalty formulation of the contact model. The integration ofthe models of the mortar, the steel and the interface has been car-ried by imposing the energy balance equation:
Z t
0
ZVr : _edV
� �dt ¼
Z t
0
ZVr : _ee dV
� �dt þ
Z t
0
ZVr : _ep dV
� �
dt þZ t
0
ZVr : _ed dV
� �dt ð14Þ
In this equation the left-hand side corresponds to the internalenergy and the three terms in the right-hand side correspond tothe elastic, plastic and damage energies, respectively. ed is theyielding strain tensor.
The ability of this integrated model to describe the cyclic behav-ior of buckling-restrained braces is verified on the simple deviceconsidered in the previous section (see Fig. 6). The core undergoessix triangular cycles of growing imposed axial displacements; theiramplitudes are ±Dy, ±2 Dy, ±3 Dy, ±5 Dy, ±10 Dy and ±15 Dy; Dy is

-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6-200
-150
-100
-50
0
50
100
150
200
Forc
e (k
N)
Displacement (mm)-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6
-150
-100
-50
0
50
100
150
Forr
ce (
kN)
Displacement (mm)
(a) Kinematic hardening (b) Isotropic hardening
Fig. 5. Numerical simulation of hysteresis loops in an axially deformed steel bar.
0.25mm
100 × 30 × 30 mm (casing)
100 × 10 × 10 mm (core)
Fig. 6. Simple buckling-restrained brace considered for verification purposes.
0.0 0.1 0.20.00
0.05
0.10
0.15
0.20
0.25
Dis
plac
emen
t (m
m)
Time (s)
Mortar node Core node
Fig. 7. Numerical simulation of the sliding behavior of the contact interface.
112 F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117
the yielding displacement. The maximum amplitude is elected togenerate plastification and damage in the steel core. Fig. 8 displaysthe obtained monotonic behavior of the tensioned naked core (a)and of the compressed whole device (b) and Fig. 9 displays the ob-tained hysteresis loops.
In Fig. 8a and b the two corner points correspond successivelyto yielding and to failure of the steel core. Comparison betweenFigs. 8 and 9 shows that the monotonic behavior in Fig. 8 can bealso observed in the hysteresis loops in Fig. 9.
6. Comparison between numerical and experimental results
The accuracy of the proposed model is checked by comparisonwith experimental results obtained in two series of tests carriedout in the universities of Girona [29] and San Diego [25],respectively.
6.1. Tests in the University of Girona
These experiments consist of testing four buckling-restrainedbraces under imposed axial displacements until failure [29,30].Such devices are shaped as shown by Fig. 1b, being basically com-posed of a slender solid bar (cylinder) as dissipative steel core anda round thin-wall steel tube filled with high strength mortar (with-out shrinkage) as restraining casing. Two two-halved steel connec-tors are placed at both ends to ensure a proper anchoring to theframe. The sliding is ensured by a three-layer interface: the steelcore is coated with Teflon�, lubricated with grease and wrappedwith rubber. Fig. 10 shows a plan view of the device, an elevationof one of their ends and two front views; the left front view includesa steel connector while the right one shows a bare core end [29].These end connections are basically hinged.
The four tested devices are termed D1, D2, D3 and D4; thevalues of their geometrical parameters (Fig. 10) are summarizedin Table 1.
Table 1 shows that dissipators D1 and D2, as well as D3 and D4,are designed to be alike; this allows comparing their results. Fig. 11depicts the testing rig of device D1.
Fig. 11 shows that the tested device is connected in one of theirends to a fixed support while the other end is connected to a jack;its motion constitutes the imposed axial displacement.
In the core and in the outer tube the steel type is S275 [13],whose nominal yielding point and ultimate strength are 275 and410 MPa, respectively; coupon tests were conducted, providingaverage yielding points equal to 307 MPa (devices D1 and D2)and to 300.5 MPa (devices D3 and D4) and average ultimatestrength equal to 427 MPa (devices D1 and D2) and to423.63 MPa (devices D3 and D4). No tests about the Young’s mod-ulus and the Poisson’s ratio were conducted, nominal values wereconsidered instead; such values are 210 GPa and 0.3, respectively.The compressive strength and the deformation modulus of themortar were determined by testing; the average obtained valueswere 39.92 MPa and 17.52 GPa, respectively. The tensile strengthand the Poisson’s ratio are estimated as 3.99 MPa and 0.2,respectively.
The imposed displacements law consists of a number of grow-ing-amplitude cycles followed by constant-amplitude cycles thatmaintained until failure; in this last phase the half-amplitude is5 Dy. The values of the yielding displacement Dy are estimated as3.83 mm for dissipators D1 and D2 and 3.37 mm for dissipatorsD3 and D4. The first imposed cycles of devices D1 and D2 are dis-played in Fig. 12; they encompass the first phase (growing-ampli-tude cycles) and part of the second one (constant-amplitudecycles).
These experiments have been simulated with the proposedmodel. The plastic behavior of the steel core is described by a kine-

0
10
20
30
40
Yielding point
Forc
e (k
N)
Displacement (mm)
Failure
0.0 0.2 0.4 0.6 0.8 1.0
-1.0 -0.8 -0.6 -0.4 -0.2 0.0
-40
-30
-20
-10
0
Forc
e (k
N)
Displacement (mm)
(a) Elongation of the steel core (b) Shortening of the overall device
Fig. 8. Numerical simulation of the monotonic behavior.
-2 -1 0 1 2
-40
-20
0
20
40
Forc
e (k
N)
Displacement (mm)
Fig. 9. Numerical simulation of the hysteresis loops.
Ltu
Lco
Ldi
Lcasing
core steel connector
dco dtu
steel plates
ELEVATION
PLAN V
: we
cn
Fig. 10. Buckling-restrained brace teste
Table 1Main geometrical parameters of prototypes D1, D2, D3 and D4.
Devices Lco (mm) Lcn (mm) Ltu (mm) Ldi (m
D1 and D2 2808 200 2422 2466D3 and D4 2808 270 2152 2196
F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117 113
matic hardening model with hardening modulus HK = 21 GPa; nodamage has been considered. In the mortar casing the fracture en-ergy per unit area is Gf = 0.104 N/mm2 and the characteristic lengthl� is equal to the geometric average of the sides of the finite ele-ment [26]. The interface is considered as an air gap; in the contactmodel the friction coefficient is j = 0.1, the directionality is isotro-pic and there is no limit in the transfer of shear stresses. Thediscretization period of the imposed displacement history (seeFig. 12) is Dt = 0.05 s. In the explicit integration the time incrementis equal to the ratio between the propagation velocity of the shearwave inside the steel and the length l� of the finite element [1].
The devices have been discretized with 8-node hexahedronLagrangian elements. Taking advantage of the symmetry of thetested braces, only half length of the each device is modeled; one
mortar
steel tube
IEW
FRONT VIEWS
dcn
lding
d in the University of Girona [29].
m) dco (mm) dtu (mm) ttu (mm) dcn (mm)
10 90 3 8022 115 3 85

fix support
jack
Fig. 11. Testing rig in the University of Girona [30].
0 500 1000 1500 2000 2500-20
-10
0
10
20
Dis
plac
emen
t (m
m)
Number of points
Fig. 12. Initial cycles of dissipators D1 and D2 (University of Girona) [29].
-20 -15 -10 -5 0 5 10 15 20
-30
-20
-10
0
10
20
30Fo
rce
(kN
)
Displacement (mm)
Numerical Experimental
Fig. 13. Numerical and experimental hysteresis loops of dissipator D1 (Universityof Girona).
-15 -10 -5 0 5 10 15-150
-100
-50
0
50
100
150
Forc
e (k
N)
Displacement (mm)
NumericalExperimental
Fig. 14. Numerical and experimental hysteresis loop of dissipator D3 (University ofGirona).
114 F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117
of their ends is fully clamped while the other one is transversallyfree while the axial displacement is imposed to the core. Thecircular cross-sections depicted in Fig. 10 have been replaced byan equivalent square geometry to ease the mesh generation andto avoid having finite elements with high aspect ratios. Since theareas of the steel core and of the mortar casing are the same inboth cases, this modification does not alter significantly the struc-tural behavior. Aiming also to obtain a regular mesh, the outer steelhas been homogenized to mortar.
Fig. 13 shows a comparison between the experimental andnumerical hysteresis loops of device D1. Given the appearance ofthe experimental yielding branches, kinematic hardening was con-sidered for the numerical modeling of the steel core. Plots fromFig. 13 show a satisfactory agreement; the pinching effect observedin the experimental results is generated by gaps in the end connec-tions (Fig. 10). Both the experimental and the numerical resultsshow that the yielding and maximum compressive forces areslightly higher than the tensile ones; this difference is due to themortar casing contribution caused by the shear stress transfer gen-erated during the buckling of the core. Conversely, in Fig. 8 bothyielding points are alike since the core is significantly stockier.
The mortar did not experience any damage; this result fits theafter-test observations [29,30].
Fig. 14 shows a comparison between an experimental and anumerical hysteresis loop of device D3 corresponding to the cycles

(a) Overall view
(b) Cross-section of devices 1G & 2G (c) Cross-section of devices 3G & 4G
Fig. 15. Devices tested in the University of California [25].
F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117 115
with higher amplitude (5 Dy, see Fig. 12). The numerical and exper-imental values of the dissipated energy (area encompassed by theloop) are 4.624 and 4.477 kNm, respectively; this agreement isconsidered satisfactory.
6.2. Tests in the University of California
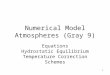
Two pairs of nominally-identical and full-scale buckling-re-strained brace sub-assemblages (termed 1G and 2G by one side,and 3G and 4G by the other side) were tested in the Universityof California, San Diego [25]. Fig. 15 describes the tested devices;they are composed of a steel surrounded by a grout-filled squaretube. The core of devices 1G and 2G is a flat plate while the oneof devices 3G and 4G has a cruciform cross-section. Table 2 dis-plays the values of the main geometrical parameters of thespecimens.
In Table 2, Ly is the length of the yielding segment, i.e. the onewhose cross-section is shaped as described by Fig. 15b or c.
The specimens underwent both longitudinal and transversalimposed displacements; only the axial components are consideredfor simulation. The loading protocol was a combination of thosestated in [2] and in FEMA 450 [16]. Such loading sequences areestablished in terms of Dby and Dbm. Dby is the yielding displace-ment, and Dbm corresponds to the design story drift; Dbm wasassumed as 5 Dby.
Table 2Main geometrical parameters of prototypes 1G, 2G, 3G and 4G (1 in. = 25.4 mm).
Devices L (in.) Lc (in.) Ly
1G and 2G 260–1/8 184–3/8 133G and 4G 250–3/16 164–7/16 14
The steel type of the core is A36 [4], whose actual average yield-ing point and ultimate strength are 37.5 and 70.3 ksi, respectively(1 ksi = 6.895 MPa); such values have been obtained from coupontests. In the outer tube the steel type is A500 Grade B [5]. The com-pressive strength of the grout was obtained by testing; the averagevalue at 28 days was 8825 psi. The deformation modulus, the ten-sile strength and the Poisson’s ratio are estimated as 2541 ksi,883 psi, and 0.2, respectively.
These experiments have been simulated with the proposedmodel. In the steel core the modulus of elasticity is taken as210 GPa and the plastic behavior is described by an isotropic andkinematic hardening model with hardening moduli HK = HI = 21GPa; no damage has been considered. In the grout fill the fractureenergy per unit area is Gf = 0.242 N/mm2 and the characteristiclength l� is equal to the side of the finite element. The sliding inter-face is considered as an air gap; in the contact model the frictioncoefficient is j = 0.1, the directionality is isotropic and there is nolimit in the transfer of shear stresses. In the explicit integrationthe time increment is equal to the ratio between the propagationvelocity of the shear wave inside the steel and the length of the fi-nite element [1].
As in the simulation of the experiments carried out in theUniversity of Girona, the devices have been discretized with 8-node hexahedron Lagrangian elements; taking advantage of thesymmetry of the devices, only half of the total length is modeled.Conversely to the discretization of the devices tested in the
(in.) Tube (in.) Core (in.)
2–1/2 14 � 14 � 5/16 8 � 1–1/24–7/16 16 � 16 � 5/16 9–3/4 � 9–3/4 � 1–1/2

(a) Device 1G (b) Device 3G
Fig. 16. Experimental hysteresis loops of devices tested in the University of California [25] (1 kip = 4448 N; 1 in. = 25.4 mm).
-500
0
500
Forc
e (k
ips)
Displacement (mm)-2 0 2
-500
0
500
Forc
e (k
ips)
Displacement (in)
(a) Device 1G. Isotropic hardening (b) Device 1G. Kinematic hardening
-1 0 1-1500
-1000
-500
0
500
1000
1500
Forc
e (k
ips)
Displacement (in)
-2 -1 0 1 2
-2 -1 0 1 2-2000
-1000
0
1000
2000
Forc
e (k
ips)
Displacement (in)
(c) Device 3G. Isotropic hardening (d) Device 3G. Kinematic hardening
Fig. 17. Numerical simulation of tests in the University of California (1 kip = 4448 N; 1 in. = 25.4 mm).
116 F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117
University of Girona, the outer steel has not been homogenized togrout.
Fig. 16 shows the experimental hysteresis loops of specimens1G and 3G and Fig. 17 displays the corresponding numericalsimulations.
Comparison between the experimental and the numerical re-sults showed in Figs. 16 and 17 shows a satisfactory agreement.In both Figures, for device 3G the maximum and yielding valuesof compressive and tensile forces are near alike while for device1G the compressive forces are higher. This dissimilarity can be ex-plained the big slenderness of the core of device 1G in its weakdirection (see Fig. 15b).
7. Conclusions
An accurate and continuum mechanics-based numerical modelof the cyclic behavior of dissipative buckling-restrained braces isbuilt. The proposed algorithm is oriented to devices composed of
a steel core embedded in a mortar or steel casing. The behaviorof the steel core is described by a model with a large displacementformulation and including multiaxial plasticity and isotropicdamage. The behavior of the mortar is described by an isotropicdamage model and the sliding behavior of the interface isdescribed by a contact penalty model. These three models areimplemented in the Abaqus software package; an explicit formula-tion is chosen because of the ill-conditioning of the stiffness matrixdue to the penalty formulation of the contact problem. The integra-tion of the models of the mortar, the steel and the interface guar-antees the stability of the energy balance. The ability of theindividual and integrated models to reproduce the cyclic behaviorof buckling-restrained braces is verified in a number of representa-tive situations. As well, the accuracy of the proposed algorithm issatisfactorily checked by comparison with two sets of experimen-tal results.
Further research will focus on extensive use of the proposedmodel to allow for accurate and innovative design of buckling-

F. López-Almansa et al. / Engineering Structures 41 (2012) 108–117 117
restrained braces, mainly for mass use in developing countries. Themain objective will be to gain a deep understanding of the inte-grated core-casing buckling behavior; preliminary results showthat slender cores generate relevant shear stress transfer to thecore while this phenomenon is less noticeable for stockier cores.It is expected that the proposed model will allow designing devicesmore slender and less costly than the commercially available ones.
Acknowledgements
This work has received financial support from the Spanish Gov-ernment under Projects CGL2008-00869/BTE and CGL2011-23621.
References
[1] ABAQUS analysis user’s manual version 6.6. Pawtucket (RI): Hibbitt, Karlsson &Sorensen, Inc.; 2006.
[2] AISC. Seismic provisions for structural steel buildings. Chicago: AmericanInstitute of Steel Construction; 2005.
[3] Armero F, Oller S. A general framework for continuum damage models. I.Infinitesimal plastic damage models in stress space. II. Integration algorithms,with application to the numerical simulation of porous metals. Int J SolidsStruct 2000;37:7409–36 (I), 7437–64 (II).
[4] ASTM A36. A36M-08 Standard specification for carbon structural steel.American Society for Testing of Materials; 2008.
[5] ASTM A500. A500M-10a Standard specification for cold-formed welded andseamless carbon steel structural tubing in rounds and shapes. AmericanSociety for Testing of Materials; 2010.
[6] Astrella M, Whittaker A. The performance-based design paradigm. MCERR.Report MCEER-05-0011 2005.
[7] Black C, Makris N, Aiken L. Component testing, seismic evaluation andcharacterization of buckling-restrained braces. J Struct Eng ASCE2004;130:329–37.
[8] Castro-Medina JC. Numerical modelling of the structural behaviour ofbuckling-restrained braces. Doctoral dissertation. Barcelona (Spain):Technical University of Catalonia; 2011 [in Spanish].
[9] Choi H, Kim J. Energy-based seismic design of buckling-restrained bracedframes using hysteretic energy spectrum. Eng Struct 2006;28:304–11.
[10] Chou CC, Chen SY. Subassemblage tests and finite element analyses ofsandwiched buckling-restrained braces. Eng Struct 2010;32:2108–21.
[11] Clark P, Aiken I, Kasai K, Ko E, Kimura I. Design procedures for buildingsincorporating hysteretic damping devices. In: Proceedings of the 68th annualconvention. Sacramento: Structural Engineers Association of California; 1999.p. 355–71.
[12] D’Aniello M, Della Corte G, Mazzolani FM, Landolfo R. Steel buckling-restrainedbraces. In: Seismic upgrading of RC buildings by advanced techniques – theILVA-IDEM research project. Italy: Polimetrica Publisher; 2006. p. 179–223.
[13] EN 10025. Hot rolled products of structural steels. European Committee forStandardization; 2002.
[15] Fahnestock LA, Sause R, Ricles JM. Seismic analysis and design of buckling-restrained braced frames. In: Walraven, Blaauwendraad, Scarpas, Snijder,editors. 5th International PhD symposium in civil engineering. Taylor &Francis; 2004.
[16] FEMA 450. NEHRP recommended provisions for seismic regulations for newbuildings and other structures. Federal Emergency Management Agency;2003.
[17] Housner GW, Bergman LA, Caughey TK, Chassiakos AG, Claus RO, Masri SF,et al. Structural control: past, present, and future. J Eng Mech ASCE1997;123:897–971.
[18] Iwata M. Applications-design of buckling-restrained braces in Japan. In: 13thWorld conference on earthquake engineering. Paper No. 3208. Vancouver,Canada; 2004.
[19] Kasai K, Kibayashi M. JSSI manual for building passive control technology. Part1 Manual contents and design/analysis methods. In: 13th World conference onearthquake engineering. Paper No. 2989. Vancouver, Canada; 2004.
[20] Kibayashi M, Kasai K, Tsuji Y, Kikuchi M, Kimura Y, Kobayashi T, et al. JSSImanual for building passive control technology. Part 2 criteria forimplementation of energy dissipation devices. In: 13th World conference onearthquake engineering. Paper No. 2990. Vancouver, Canada; 2004.
[21] Lee K, Bruneau M. Energy dissipation of compression members inconcentrically braced frames: review of experimental data. J Struct Eng ASCE2005;131:552–9.
[22] López WA, Gwie DS, Lauck TW, Saunders M. Structural design andexperimental verification of a buckling-restrained braced frame system. EngJ 2004;41(4):177–86.
[23] Lubliner J, Oliver J, Oller S, Oñate E. A plastic damage model for concrete. Int JSolids Struct 1989;25(3):299–326.
[24] Martelli A. Modern seismic protection systems for civil and industrialstructures. An advanced approach to earthquake risk scenarios, withapplications to different European towns; 2006. <http://www.samco.org/network/download_area/paper_martelli.pdf>.
[25] Newell J, Uang CM, Benzoni G. Subassemblage testing of core brace buckling-restrained braces (G Series). Report No. TR-2006/01. University of CaliforniaSan Diego; 2006.
[26] Oliver J. A consistent characteristic length for smeared cracking models. Int JNumer Meth Eng 1989;218:461–74.
[27] Palazzo G, Crisafulli F, López Almansa F, Cahís X. Análisis numéricoexperimental de barras de pandeo restringido. XIX Jornadas Argentinas deIngeniería Estructural. Mar del Plata Argentina 2006.
[28] Palazzo G, Crisafulli F. Estudio Comparativo de Distintos Disipadores porFluencia en Base a los Requerimientos Establecidos en Distintas Normas. XXXIJornadas Sud-Americanas de Ingeniería Estructural. Mendoza. Argentina;2004.
[29] Palazzo G, López-Almansa F, Cahís X, Crisafulli F. A low-tech dissipativebuckling-restrained brace. design, analysis, production and testing. Eng Struct2009;31:2152–61.
[30] Palazzo G, López-Almansa F, Cahís X, Crisafulli F. Theoretical and experimentalanalysis of dissipative buckling restrained braces. CIMNE Monograph, ReportIS-64; 2011.
[31] Sabelli R, Aiken I. US building-code provisions for buckling-restrained bracedframes: basis and development. In: 13th World conference on earthquakeengineering. Paper No. 1828. Vancouver, Canada; 2004.
[34] Sabelli R, Pottebaum W, Brazier JC, López W. Design of a buckling-restrainedbraced frame utilizing 2005 seismic standards. Metropolis & beyond 2005. In:Proceedings of the 2005 structures congress and the 2005 forensic engineeringsymposium, New York; 2005.
[35] Simo JC, Ju JW. Strain and stress-based continuum damage models. I.Formulation. Int J Solids Struct 1987;23(7):821–40.
[36] Simo JC, Hughes TJR. Computational inelasticity. Springer; 1998.[37] Soong T, Dargush G. Passive energy dissipation systems in structural
engineering. John Wiley; 1997.[38] Tremblay R, Bolduc P, Neville R, De Vall R. Seismic testing and performance of
buckling-restrained bracing systems. Can J Civil Eng 2006;33:183–98.[39] Tremblay R, Degrange G, Blouin J. Seismic rehabilitation of a four-storey
building with a stiffened bracing system. In: 8th Canadian conference onearthquake engineering. Vancouver: Canadian Association for EarthquakeEngineering; 1999. p. 549–54.
[41] Tsai KC, Lai JW, Hwang YC, Lin SL, Weng CH. Research and application ofdouble-core buckling-restrained braces in Taiwan. In: 13th World conferenceon earthquake engineering. Paper No. 2179. Vancouver, Canada; 2004.
[42] Wada A, Nakashima M. From infancy to maturity of buckling-restrained bracesresearch. In: 13th World conference on earthquake engineering. Paper No.1732. Vancouver, Canada; 2004.
[43] Watanabe A, Hitomi Y, Saeki E, Wada A, Fujimoto M. Properties of braceencased in buckling-restraining concrete and steel tube. In: Proceedings of theninth world conference on earthquake engineering, vol. IV. Tokyo-Kyoto(Japan): Japan Association for Earthquake Disaster Prevention; 1988. p. 719–24.
[44] Wriggers P. Computational contact mechanics. Springer-Verlag; 2006.