Embed Size (px)
Citation preview

AEM, ch12RF Design Lab.1
A PDE is an equation that contains one or more partial derivatives of an unknownfunction that depends on at least two variables. Usually one deals with time t and theremaining with space (spatial variable(s)). The most important PDEs are the waveequations that can model the vibrating string (Secs. 12.2, 12.3, 12.4, 12.12) and thevibrating membrane (Secs. 12.8, 12.9, 12.10), the heat equation for temperature in a bar orwire (Secs. 12.5, 12.6), and the Laplace equation for electrostatic potentials (Secs. 12.6,12.10, 12.11). PDEs are very important in dynamics, elasticity, heat transfer,electromagnetic theory, and quantum mechanics. They have a much wider range ofapplications than ODEs, which can model only the simplest physical systems. Thus PDEsare subjects of many ongoing research and development projects.
AEM, ch12RF Design Lab.
A partial differential equation (PDE) is an equation involving one or more partialderivatives of an (unknown) function, call it u, that depends on two or more variables,often time t and one or several variables in space. The order of the highest derivative iscalled the order of the PDE. a PDE is linear if it is of the first degree in the unknownfunction u and its partial derivatives. Otherwise we call it nonlinear.
2

AEM, ch12RF Design Lab.3
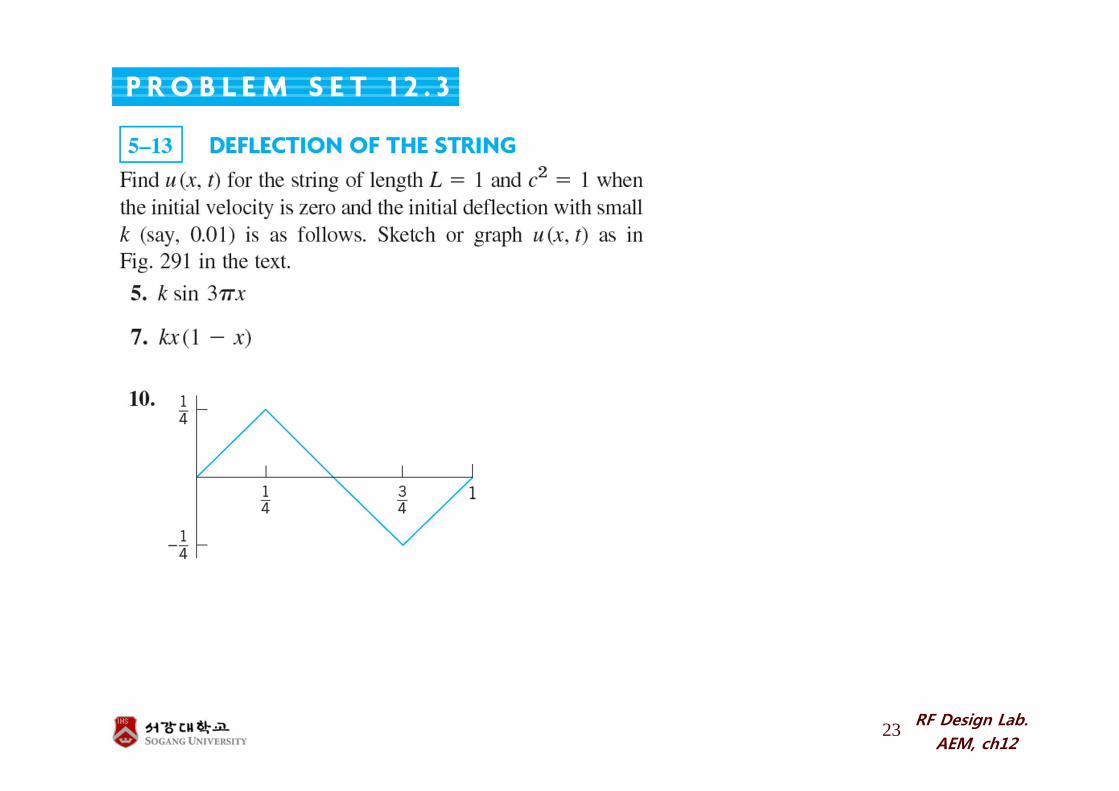
Verify (by substitution) that the given function is a solution of the PDE (1).
In general, many solutions satisfying a given PDE can exist.

AEM, ch12RF Design Lab.4
The unique solution of a PDE will be obtained by the use of additional conditions arisingfrom the physical problem.
Boundary conditions give the value of the function u on the boundary of the region R.Initial conditions specifies the value of u or / or both at 0.

AEM, ch12RF Design Lab.5

AEM, ch12RF Design Lab.6
We want to derive the PDE modeling small transverse vibrations of an elastic string suchas a violin string. We place the string along the x-axis, stretch it to length L, and fasten itat the ends 0 and . We then distort the string, and at some instant, call it 0,we release it and allow it to vibrate. The problem is to determine the vibrations of thestring, that is, to find its deflection , at any point x and at any time 0.
Physical Assumptions1. The mass of the string per unit length is constant along the string. The string isperfectly elastic and does not offer any resistance to bending.2. The tension of the string is so large that the action of the gravitational force on thestring can be neglected.3. The string performs small transverse motions in a vertical plane; that is, every particleof the string moves strictly vertically and so that the deflection and the slope at everypoint of the string always remain small in absolute value.
0
string ,
AEM, ch12RF Design Lab.7
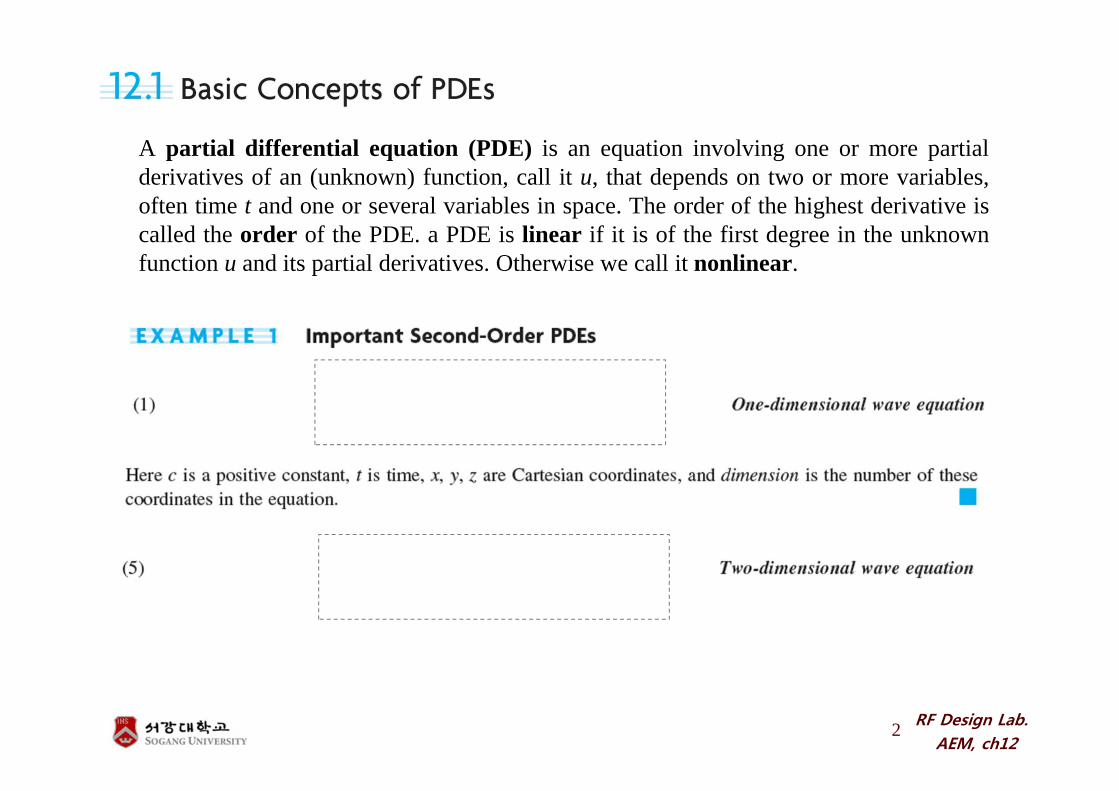
To obtain the PDE, we consider the forces acting on a small portion ∆ of the String.Since the string offers no resistance to bending, the tension is tangential to the curve of thestring at each point. Let and be the tension at the endpoints P and Q of that portion.Since the points of the string move vertically, there is no motion in the horizontal direction.Hence the horizontal components of the tension must be constant.
The vertical component of the force (tension) :
∆ , : mass of undeflected string per unit length
∆ : length of the portion of undeflected string
,

AEM, ch12RF Design Lab.8
This is called the one-dimensional wave equation. It is homogeneous and of the secondorder. “One dimensional” means that the equation involves only one space variable, x.

AEM, ch12RF Design Lab.9
for the unknown deflection , of the string and some additional conditions.
Boundary conditions : string is fastened at the ends 0 and .
The model of a vibrating elastic string (a violin string, for instance) consists of the one-dimensional wave equation (PDE)
Initial conditions: let’s call the initial deflection , and the initial velocity
0
We now have to find a solution of the PDE (1) satisfying the conditions (2) and (3).

AEM, ch12RF Design Lab.10
In the method of separating variables, or product method, we determine solutions of the wave equation (1) of the form
Differentiating (4), we obtain
AEM, ch12RF Design Lab.11
The variables are now separated, the left side depending only on t and the right side onlyon x. Hence both sides must be constant because, if they were variable, then changing tor x would affect only one side, leaving the other unaltered.
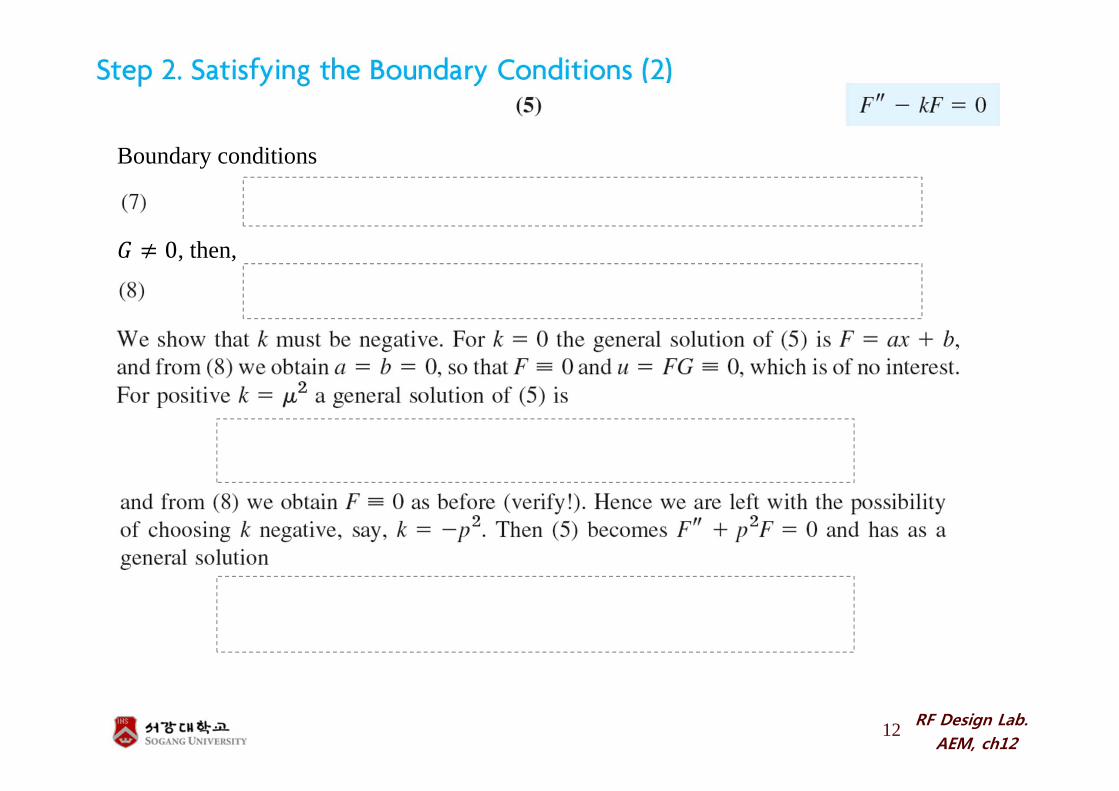
AEM, ch12RF Design Lab.12
Boundary conditions
0, then,
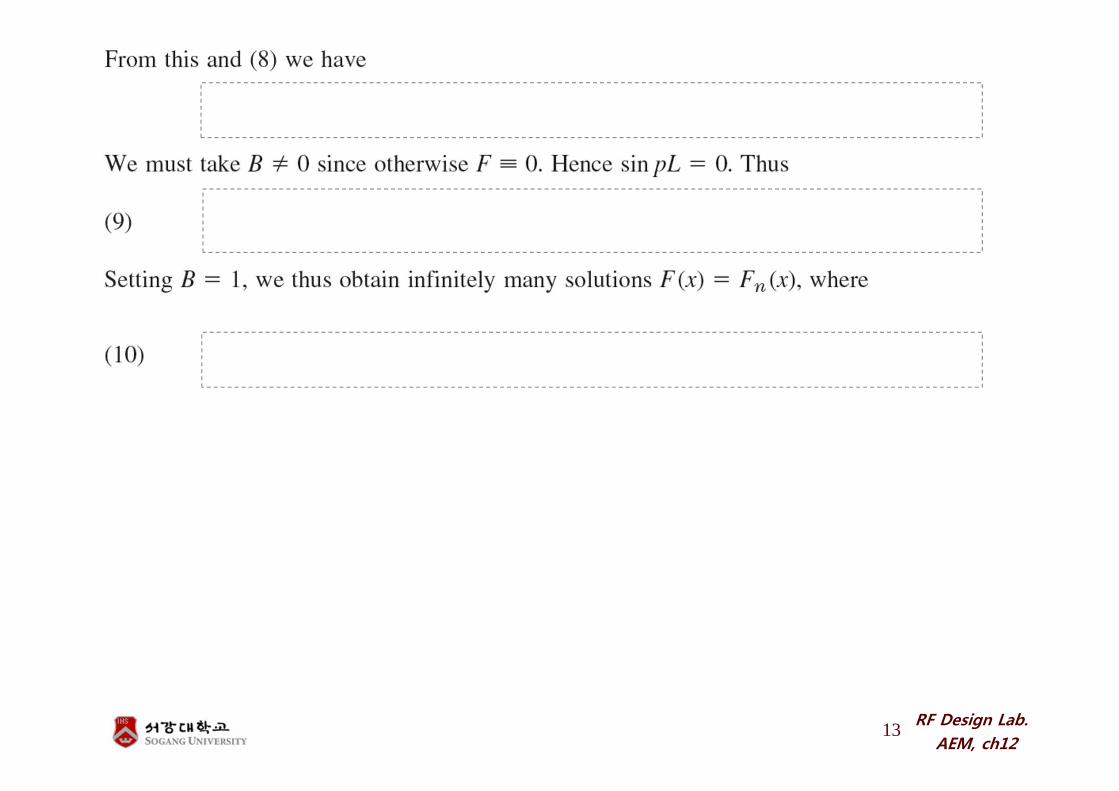
AEM, ch12RF Design Lab.13
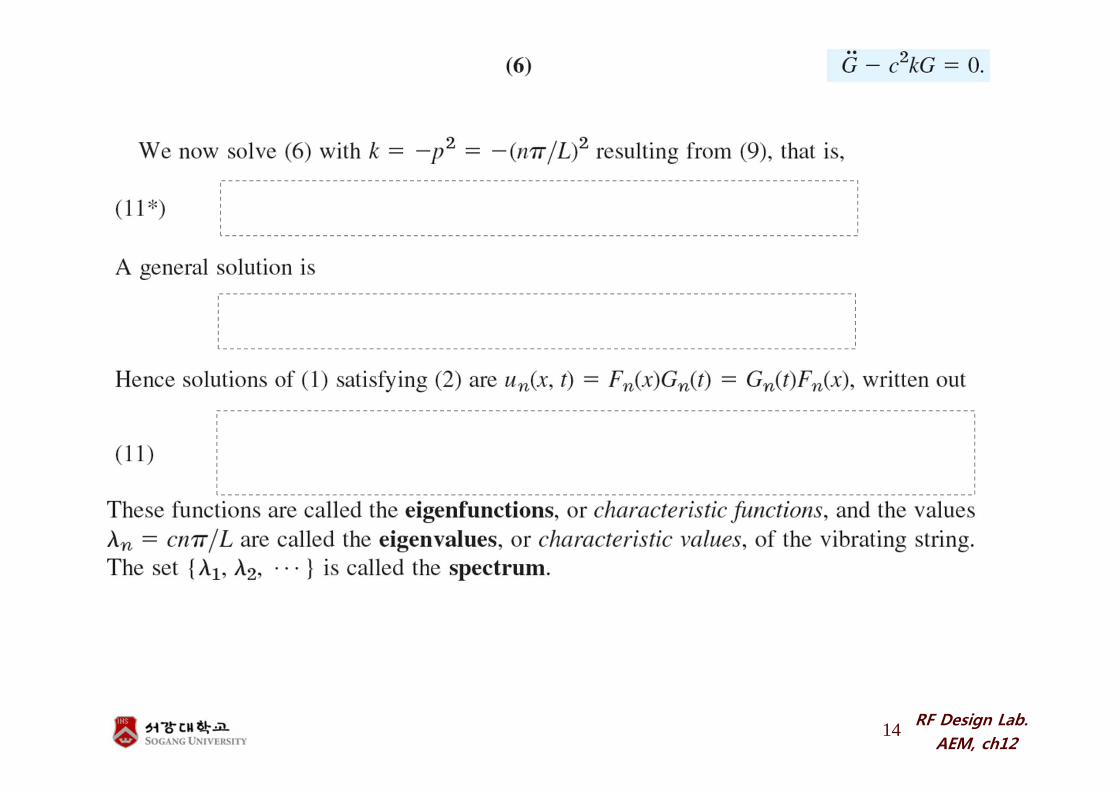
AEM, ch12RF Design Lab.14
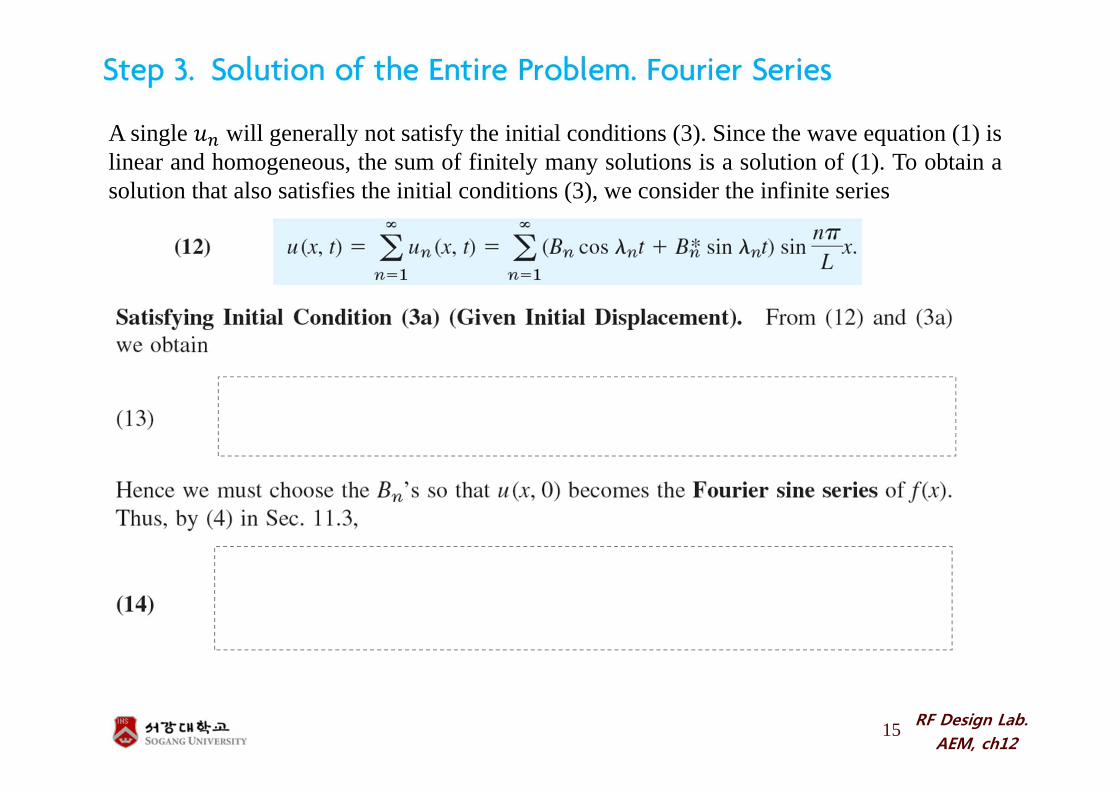
AEM, ch12RF Design Lab.15
A single will generally not satisfy the initial conditions (3). Since the wave equation (1) islinear and homogeneous, the sum of finitely many solutions is a solution of (1). To obtain asolution that also satisfies the initial conditions (3), we consider the infinite series

AEM, ch12RF Design Lab.16

AEM, ch12RF Design Lab.17
For the sake of simplicity, we consider only the case when the initial velocity is identically zero. Then the ∗ are zero, and (12) reduces to

AEM, ch12RF Design Lab.18

AEM, ch12RF Design Lab.19

AEM, ch12RF Design Lab.20
increases

AEM, ch12RF Design Lab.21

AEM, ch12RF Design Lab.22
Fundamental frequency of sound -> pitch :
Tuning is done by changing the tension .
Fundamental mode
cos cos 2 2∴ : fundamental mode
AEM, ch12RF Design Lab.23
AEM, ch12RF Design Lab.
• alternative approach to solve the wave equation using
24
New independent variables:(2) ,
1, 1, , Chain rules:
We assume that all the partial derivatives involved are continuous, so that .
2
By the same procedure, we find
2
By inserting these two results in (1), we get
(3) ≡ 0

AEM, ch12RF Design Lab.25
(3) can be readily solved by two successive integrations, first with respect to and then with respect to . This gives
and Solution:
(4) ,
This is known as d’Alembert’s solution of the wave equation (1).
D’Alembert’s Solution Satisfying the Initial Conditions
By differentiating (4), we have
, where primes denote derivatives with respect to the entire arguments and , respectively. From (4)-(6), we have
(7) , 0 ,
(8) , 0 .
AEM, ch12RF Design Lab.26
Dividing (8) by and integrating with respect to , we obtain
If we add this to (7), we obtain
Similarly, subtraction of (9) from (7) gives
In (10), we replace by . In (11), we replace by and get minus an integral from to to plus an integral from to . Then,
is

AEM, ch12RF Design Lab.27
If the initial velocity is zero ( 0), we see that (12) reduces to
(13) , ,
in agreement with (17) in Sec. 12.3.
Our result shows that the two initial conditions determine the solution uniquely.









![DRAFT: April 28, 2008 - Columbia Universitymiw2103/Courses/PDE-2008/PDE-Notes-miw04-28-08.pdfApril 28, 2008 Contents 1 First ... 9 The Heat / Di usion Equation 29 ... [˚] = ( 1) jf[](https://img.pdfslide.net/doc/110x75/5b05e8d47f8b9ad5548c1f65/draft-april-28-2008-columbia-miw2103coursespde-2008pde-notes-miw04-28-08pdfapril.jpg)