Embed Size (px)
Citation preview

A PEG-BASED ASCENDING GUIDANCE ALGORITHM FORRAMJET-POWERED VEHICLES
Keum-Seong Kim∗ , Jung-Woo Park∗ , Min-Jea Tahk∗ , Han-Lim Choi∗∗Division of Aerospace Engineering, KAIST, Daejeon 305-701, Korea
[email protected]; [email protected]; [email protected]; [email protected]
Keywords: Missile Guidance, PEG, Supersonic engine vehicle
Abstract
This paper addresses guidance of ramjet vehiclesto minimize propellant consumption along the as-cending trajectory. An extension of the poweredexplicit guidance (PEG) algorithm is proposed to(a) incorporate parameter estimation of velocityto be gained and the burn time under unknownthrust profile, and (b) take into account aerody-namic forces on the vehicle flying at supersonicspeed, while taking advantage of fuel efficiencyof linear tangent-based approaches. Numericalsimulations demonstrate feasibility of the pro-posed approach.
1 Introduction
Ramjet propulsion systems have been studiedsince 1910s [1]. Advantages of ramjet propul-sion over other air-breathing propulsion systemsinclude fuel efficiency, light vehicle weight, andsimple structure; these advantages may enablethe use of a ramjet-powered vehicle as a high-speed precision guided weapon [2]. Operation ofa vehicle with a supersonic engine is often limiteddue to interaction between the vehicle motion andthe combustion process. Therefore, a specializedguidance scheme is needed for ramjet missiles inorder to consider maneuver limitations and thusto fully exploit the potential benefits of ramjet ve-hicles such as fuel efficiency.
Unfortunately, however, perhaps for securityreasons, there has been little open research onguidance algorithms for ramjet missiles. Instead,
there has been research on a fuel-efficient guid-ance framework in the context of launch vehicleguidance [3, 4, 5, 6], termed powered explicitguidance (PEG). The PEG algorithm does notrequire the intermediate information (e.g., posi-tion, velocity) to create the vehicle’s pitch com-mand, and is known to be used for vehicles withlarge variation in the thrust-weight ratio. Also, inprinciple the PEG, which is based on the lineartangent law, provides a minimum-time trajectoryonce the final orbit requirements are satisfied.
Note that the ascending phase of a ramjetmissile has similarities with the first phase oflaunch vehicles: (a) final constraints of the phasemust be satisfied, and (b) the thrust-weight ra-tio of the vehicle varies significantly. In addi-tion, for a given propulsion strategy, a minimum-fuel ascent trajectory is often very close to theminimum-time trajectory with a linear tangentscheme. Thus, a PEG approach can be a good so-lution for ramjet vehicle guidance for which pro-pellent saving is crucial; therefore, this work pro-poses a PEG-based method for ascending guid-ance of a ramjet missile.
However, since PEG was originally devel-oped for vehicles operating in exoatmosphere, itcannot directly be applied to guidance of ramjetmissiles flying in the air. The main contributionof this work is to present required modificationsto the PEG algorithm to incorporate additionalaerodynamic terms such as lift and drag. Nu-merical examples on two-dimensional ascendingguidance demonstrate feasibility of the proposedmethod for supersonic ramjet missiles.
1

KIM, PARK, TAHK, & CHOI
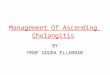
unit: m
Fig. 1 Ramjet Missile Configuration
2 Preliminaries
2.1 Missile Model
There are several missiles which are operatedby ramjet engine. The missile model used inthis research is based on Yakhont [7] which is amedium-range ship to ship missile.
In the simulation, the ramjet missile config-uration is needed to obtain aerodynamic data.A reference configuration which is used in thispaper is shown in Fig. 1. This work consid-ers a missile configuration to roughly model theYakhont[8] whose image is available on the In-ternet. Aerodynamic coefficients can be obtainedusing the shape of the missile and an aerody-namic coefficient generation program . The liftcoefficients and drag coefficients covers Mach1.5 to 3.3 with angle of attack between −6◦ and6◦.
Thrust modeling was conducted. Thrust canbe defined as a function of the Mach number, al-titude, angle of attack, nozzle throttle area, andrate of fuel injection. The ramjet engine doesnot have its own compressor, so it needs the com-bustion process of compressing air with its ownshape and fuel ignition. Base of this combus-tion process, the suction rate of air, combustionefficiency, and thrust properties are changed ac-cording to the flight conditions. Also, as the rateof fuel injection and nozzle throttle area change,the temperature and pressure of the combustorchange. Generally, the nozzle throttle area is usedto maintain stability of the combustor environ-ment, and thrust is not sensitively changed by the
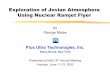
Fig. 2 Linear Tangent Steering Law[4]
nozzle throttle area. In this paper, the effect of thenozzle throttle area is assumed to be fixed duringthrust evaluation.
2.2 PEG Algorithm[4]
This section explains PEG algorithm which isalready-developed and studied by previous re-searchers, as a preliminary of the paper.
A general PEG algorithm has the advantageof not requiring the intermediate position and ve-locity to acquire the vehicle’s pitch command toaccomplish minimum time guidance and reachthe final orbit requirements[9]. PEG is an algo-rithm based on linear tangent law. It has beendeveloped to handle the space shuttle. Lineartangent law is irrelevant to the magnitude of thethrust vector, but relates to the direction of thevector.
The vehicle equation of motion can be ex-pressed as follows
Fm~uF +~gF =~r (1)
Fig. 2 represents the basic concept of the Lin-ear Tangent Steering Law [4]. Based on Fig.2, the
2

Guidance for Supersonic Engine Missile
thrust vector can be written as (2)
~uF =~λv +
~λ(t− tλ)√
1+~λ
2(t− tλ)
2(2)
λF is a vector defining the commanded thrust di-rection, λv is a unit vector in the direction of thevelocity to be gained, λ is a vector which is nor-mal to λv. tλ means the time chosen that the totalvelocity changes due to thrust along λv, and tc iscurrent time.
The PEG algorithm consists of three parts.First, the steering parameters are calculated. Thesteering parameters λv and tλ can be obtainedfrom (4), (4):
~λv =~vgo
L(3)
~tλ =JL
(4)
where
L =∫ tgo
0 (F/m)dt S =∫ tgo
0∫ t
0 (F/m)dsdtJ =
∫ tgo0 (F/m)dt Q =
∫ tgo0
∫ t0 (F/m) tdsdt
H =∫ tgo
0 (F/m) t2dt P =∫ tgo
0∫ t
0 (F/m) t2dsdt(5)
Finally ~λ can be represented as (6).
~λ =
~rgo−S~λv
Q−Stλ(6)
From (6), the control input can be calculated as(2).
The second step is the prediction of the cutoffstate. In this step, final states are predicted byusing parameters which are obtained in the firststep.
~vthrust = ~λv
[L− 1
2λ
2 (H− tλJ)]
(7)
~rthrust = ~λv
[S− 1
2λ
2 (P−2tλQ+ t2J)]
+~λ(Q−Stλ) (8)~vp = ~v+~vthrust +~vgrav (9)~rp = ~r+~vtgo +~rthrust +~rgrav (10)
Finally, correction in the ~vgo is needed toachieve null terminal errors. ~vmiss which is thedifference between the predicted final velocityand desired final velocity is calculated as (11)After that, ~vgo is updated by using the followingterm.
~vmiss = ~vp−~vd (11)~vgo (new) = ~vgo (old)−~vmiss (12)
A general PEG algorithm mentioned in thissection has the advantage of not requiring in-termediate position and velocity and generatesvehicle’s pitch command to accomplish mini-mum time guidance to reach final orbit require-ments. Because there are many similarities be-tween launch vehicle and ramjet missile, PEGcan be applied as a ramjet missile guidance withfixed propulsion strategy.
3 Modification of PEG Algorithm
The objective of PEG algorithm usually used inlaunch vehicle is minimizing time of fuel con-sumption during the launch phase. If thrust isfixed, the result of minimizing time of fuel con-sumption problem is almost same as the result ofminimizing fuel consumption problem. So PEGalgorithm can be used as a guidance algorithm forramjet supersonic missiles which have an objec-tive of minimizing propellent consumption.
However PEG algorithm does not considerabout aerodynamic forces. Also thrust profileneeds to be known to apply PEG algorithm to ve-hicles. To integrate the algorithm into ramjet mis-sile which flies at supersonic speed, additionalmodification to consider aerodynamic force andunknown thrust profile is needed.
The thrust of a supersonic missile varies withthe flight environment and flight conditions of thevehicle such as the Mach number, altitude, angleof attack, and equivalent ratio, and it cannot beestimated beforehand. It has the problem that itis impossible to calculate the initial ~vgo and tgodirectly. So it is impossible to apply the generalPEG algorithm directly to the supersonic enginemissile guidance. To apply PEG to missile guid-
3

KIM, PARK, TAHK, & CHOI
Fig. 3 Geometry for calculation time-to-go
ance, it is necessary to make modifications to thePEG algorithm.
Vgo Calculation: Initially the thrust profile isunknown, so~vgo which is an important parameterin PEG algorithm cannot be calculated. As a so-lution for this problem, the equation for the~vgo isreplaced as the difference between the current ve-locity and the desired cutoff velocity. The equa-tion is shown as below. In this modification, theassumption that the vehicle can always approachthe desired position using its thrust is made.
~vgo = (~vd−~v)−~vgrav (13)
tgo Estimation: The absence of information re-garding the thrust profile also makes it impossi-ble to directly calculate the tgo which indicatesthe remaining flight time. Because this param-eter is needed in the integration calculation pro-cess, a simple method is suggested in this paper.For the estimation, the assumption that the vehi-cle follows a circular arc trajectory as shown inFig. (3) is made. In Fig. (3), the radius R can becalculated through (14).
Rsinγ = dy/ tanγ
2(14)
dl is the distance between the current position andthe final destination, and it can be calculated by(15)
dl = γ(rad)R (15)
If the vehicle travels at a velocity equal to the av-erage of the vehicles current velocity and final ve-locity, tgo can be represented as follows.
tgo =dl
V1 +V2=
γdy
(V1 +V2)sinγ tan γ
2(16)
Aerodynamic Force Consideration: Gener-ally, PEG algorithm is used for the space shut-tle which is operated in the exoatmosphere. Sothere is no consideration of lift and drag terms inthe PEG algorithm. On the other hand, since mis-siles are sensitive to lift and drag, the lift and dragterms need to be additionally considered. For liftand drag consideration, a small angle of attack ofthe vehicle is assumed.
In (17),~vLïAšrepresents the velocity variationdepending on lift. This paper assumes that direc-tion of the lift and direction of the thrust is alwaysperpendicular, and from this assumption ~vL canbe estimated.
~vgo = (~vd−~v)−~vgrav−~vL (17)
In (18),~vthrust can be estimated as,~vthrust =~vd−~v, and β is a tuning variable.
~vthrust ·~vL = 0 (18)|~vthrust | = β |~vL| (19)
~rL represents the position obtained from acceler-ation which is generated from lift. To considerthe lift force,~rL is added to calculation of~rgo .
~rgo = ~rd−~r−~vtgo−~rL (20)
~rL =∫ tgo
0
∫ t
0~aLdsdt =
12~vLtgo (21)
From the assumption, drag vector has the samedirection with thrust. So, for the consideration ofdrag, the additional magnitude of drag is addedto the thrust.
4 Simulation Results
4.1 Trajectory Optimization
The objective of trajectory optimization is to ob-tain the optimal ascending trajectory of a super-sonic engine missile. Because there was no pre-vious research of specific guidance algorithm for
4

Guidance for Supersonic Engine Missile
ramjet missile, it is difficult to measure the utilityof the result obtained from this paper. Hence, theresult of the optimal trajectory will be used as acriterion of judgment to evaluate the suitability ofthe suggested algorithms which are introduced inthe following chapters. The major considerationof ramjet engine missile is a fuel consumption.The cost function for trajectory optimization isdefined as (22) which minimizes total fuel con-sumption.
minJ =∫ t f
t0m f dt (22)
The results of the simulation show ascending tra-jectories, fuel consumption rate and velocity pro-file of the ascending phase. The command ob-tained from result of trajectory optimization isapplied to 6DOF simulation.
4.2 Modified PEG
6DOF simulation is conducted with MPEG. Mis-sile model for 6DOF simulation is obtained froma previous section. In this paper, equivalence ra-tio for generating thrust is fixed as constant value.Simulation is conducted several times with differ-ent initial condition and final constraints.
Table. 1 represent several cases with differentconditions for simulations. For each of the cases,6DOF simulation results of trajectory optimiza-tion and MPEG which show the total fuel con-sumption and total ascending time are denoted inTable. 2. As you can see in the table total fuelconsumption of MPEG is 0.9% - 17% larger thantrajectory optimization results. About time vari-ables, some results of MPEG shows shorter as-cending time compare with results of trajectoryoptimization. Considering that result from tra-jectory optimization is the optimal, result of theMPEG shows promise of application. Figs. 4through 7 show exemplary simulation results ofmodified PEG algorithm for case 3. Simulationresults show that they satisfy final constraints,and the angle of attack of a vehicle varies be-tween -0.5◦ and 4.5 ◦.
Table 1 Simulation Condition
Case Initial FinalCondition Condition
1. Altitude(km) 2.1 16Mach 2.1 2.5Path angle (deg) 18 0
2. Altitude(km) 2.1 16Mach 2.1 2.5Path angle (deg) 36 0
3. Altitude(km) 2.1 16Mach 2.1 2.9Path angle (deg) 18 0
4. Altitude(km) 2.1 16Mach 2.1 2.9Path angle (deg) 36 0
Table 2 Simulation Result
units: Time - sec Trajectory MPEGFuel used - kg Optimization
1. Time 89.1 92.1Fuel used 291 342
2. Time 101.0 95.9Fuel used 335 338
3. Time 100.0 123.8Fuel used 343 375
4. Time 104.5 137.1Fuel used 365 377
5 Conclusion
This paper has presented a PEG-based guidancealgorithm for supersonic engine missiles. A mod-ified PEG algorithm that allows for consider-ing additional aerodynamic effects and real timeguidance is suggested. Numerical simulationshave verified reasonable performance of the pro-posed method, compared to the trajectory opti-mization result.
References
[1] Ronald S.Fry. A century of ramjet propulsiontechnology evolution. Journal of Propulsionand Power, 20, No. 1:27–58, 2004.
5

KIM, PARK, TAHK, & CHOI
Fig. 4 Trajectory Fig. 5 Mach
Fig. 6 Angle of attack Fig. 7 Pitch command, Flight path angle
[2] R.F.Calzone. Developments in missile ramjetpropulsion. Technical report, TNO Prins Mau-rits Laboratory, Dec 1996.
[3] U.R.No E.J.Song, J.M.Ahn and H.D.Choi.Powered explicit guidance for 3-staged satellitelaunch vehicle. KSAS, Apr 2005.
[4] A.D.Long F.F.Cockrell R.L.MacHenry,T.J.Brand and J.R.Thibodeau III. A spaceshuttle ascent guidance, navigation, and con-trol. The Journal of the Astronautical Sciences,XXVII, No. 1:1–38, 1979.
[5] Woongrae Roh and Youdan Kim. Trajectory op-timization for a multi-stage launch vehicle us-ing time finite element and direct collocationmethod. Engineering Optimization, 34:15–32,2002.
[6] R. Vijaya Vittal and M. Seetharama Bhat. Anexplicit closed-loop guidance for launch vihi-cles. Acta Astronautica, 25, No. 3:119–129,1991.
[7] http://en.wikipedia.org/wiki/P-800_Oniks.[8] Russia provides syria with
yakhont anti-ship missiles.http://israelmatzav.blogspot.kr/2011/11/russia-provides-syria-with-yakhont-anti.html, 2011.
[9] Michael A. Bolender Jason T. Parker andDavid B. Doman. Control-oriented modelingof an air-breathing hypersonic vehicle. Journalof Guidance, Control, and Dynamics, 30, No.3:856–869, 2007.
[10] Michael A. Bolender Lisa Fiorentini, An-drea Serrani and David B. Doman. Nonlinear
6

Guidance for Supersonic Engine Missile
robust adaptive control of flexible air-breathinghypersonic vehicles. Journal of Guidance, Con-trol, and Dynamics, 32, No. 2:401–416, 2009.
[11] Fariba Fahroo and I. Michael Ross. Costate es-timation by a legendre pseudospectral method.Journal of Guidance, Control, and Dynamics,24, No. 2:270–277, 2001.
[12] Stephen Yurkovich Michael A. Bolender JasonT. Parker, Andrea Serrani and David B. Do-man. Approximate feedback linearization ofan air-breathing hypersonic vehicle. pages 19–987. AIAA Guidance, Na-vigation, and ControlConference and Exhibit, Dec 2005.
[13] Frank M Perkins and AEROSPACE CORPEL SEGUNDO CA. Derivation of linear tan-gent steering law. Technical report, CommaderSpace Systemss Division Air Force SystmesCommand Los Angeles Air Force Station, Nov1966.
Copyright Statement
The authors confirm that they, and/or their company ororganization, hold copyright on all of the original ma-terial included in this paper. The authors also confirmthat they have obtained permission, from the copy-right holder of any third party material included in thispaper, to publish it as part of their paper. The authorsconfirm that they give permission, or have obtainedpermission from the copyright holder of this paper, forthe publication and distribution of this paper as part ofthe ICAS2012 proceedings or as individual off-printsfrom the proceedings.
7