Embed Size (px)
Citation preview

Computers & Graphics 27 (2003) 107–121
Technical section
A rational cubic spline for the visualization of monotonic data:an alternate approach
M. Sarfraz*
Department of Information and Computer Science, King Fahd University of Petroleum and Minerals, KFUPM # 1510,
Dhahran 31261, Saudi Arabia
Accepted 18 October 2002
Abstract
A smooth curve interpolation scheme for monotonic data was developed by Sarfraz (Comput. Graph. 24(4) (2000)
509). This scheme is reviewed and a new alternate approach, which was indicated in Sarfraz (Comput. Graph. 26(1)
(2002) 193), has been introduced with all details and solid proofs here. In theory, the new scheme uses the same
piecewise rational cubic functions as in Sarfraz (2000), but it utilizes a rational quadratic in practice. The two families of
parameters, in the description of the rational interpolant, have been constrained to preserve the monotone shape of the
data. The new rational spline scheme, like the old one in Sarfraz, 2000, has a unique representation. The degree of
smoothness attained is C2 and the method of computation is robust.
Both, old as well as new shape preserving methods, seem to be equally competent. This is shown by a comparative
analysis. There is a trade off between the two methods as far as computational aspects are concerned. However, the new
method is superior to the old method as far as accuracy is concerned. This fact has been proved by making an error
analysis over the actual and computed curves.
r 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Data visualization; Rational spline; Interpolation; Shape preserving; Monotone
1. Introduction
Smooth curve representation, to visualize the scientific
data, is of great significance in the area of Computer
Graphics and in particular Data Visualization. Particu-
larly, when the data is obtained from some complex
function or from some scientific phenomena, it becomes
crucial to incorporate the inherited features of the data.
Moreover, smoothness is also one of the very important
requirements for pleasing visual display. Ordinary spline
schemes, although smoother, are not helpful for the
interpolation of the shaped data. Severely misleading
results, violating the inherent features of the data, are
seen when undesired oscillations occur. For example, for
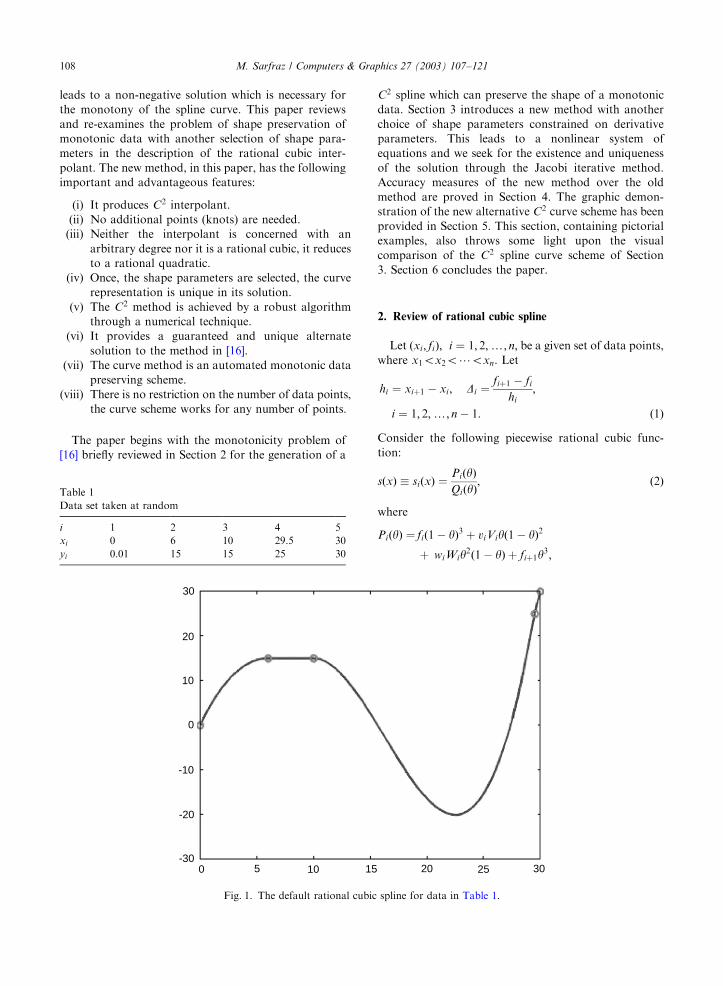
the data sets in Table 1 (data taken randomly) and Table
2 (Akima’s data [3]), their corresponding curves in
Figs. 1 and 2, respectively, are not as may be desired by
the user for a monotonically increasing data. The user
would visualize them as they appear in Figs. 5 and 6,
respectively. Thus, unwanted oscillations which com-
pletely distort the data features, need to be controlled.
Various authors have discussed this issue. For brevity,
the reader is referred to [1–19].
This paper reviews the method of shape preservation
of monotonic data in [16] and introduces a new alternate
approach, indicated in [19]. The motivation to this work
is due to some observations in the past work [16] of the
author. One observation was that the shape parameters,
in the description of the rational cubic interpolant, were
restricted to a particular choice. But, the author
observed equally good results for another choice too.
Another observation made was that there is no
guarantee that the system of linear equations, in [16],*Tel.: +966-3-860-2763; fax: +966-3-860-1562.
E-mail address: [email protected] (M. Sarfraz).
0097-8493/03/$ - see front matter r 2002 Elsevier Science Ltd. All rights reserved.
PII: S 0 0 9 7 - 8 4 9 3 ( 0 2 ) 0 0 2 4 9 - 2
leads to a non-negative solution which is necessary for
the monotony of the spline curve. This paper reviews
and re-examines the problem of shape preservation of
monotonic data with another selection of shape para-
meters in the description of the rational cubic inter-
polant. The new method, in this paper, has the following
important and advantageous features:
(i) It produces C2 interpolant.
(ii) No additional points (knots) are needed.
(iii) Neither the interpolant is concerned with an
arbitrary degree nor it is a rational cubic, it reduces
to a rational quadratic.
(iv) Once, the shape parameters are selected, the curve
representation is unique in its solution.
(v) The C2 method is achieved by a robust algorithm
through a numerical technique.
(vi) It provides a guaranteed and unique alternate
solution to the method in [16].
(vii) The curve method is an automated monotonic data
preserving scheme.
(viii) There is no restriction on the number of data points,
the curve scheme works for any number of points.
The paper begins with the monotonicity problem of
[16] briefly reviewed in Section 2 for the generation of a
C2 spline which can preserve the shape of a monotonic
data. Section 3 introduces a new method with another
choice of shape parameters constrained on derivative
parameters. This leads to a nonlinear system of
equations and we seek for the existence and uniqueness
of the solution through the Jacobi iterative method.
Accuracy measures of the new method over the old
method are proved in Section 4. The graphic demon-
stration of the new alternative C2 curve scheme has been
provided in Section 5. This section, containing pictorial
examples, also throws some light upon the visual
comparison of the C2 spline curve scheme of Section
3. Section 6 concludes the paper.
2. Review of rational cubic spline
Let ðxi; fiÞ; i ¼ 1; 2;y; n; be a given set of data points,where x1ox2o?oxn: Let
hi ¼ xiþ1 � xi; Di ¼fiþ1 � fi
hi
;
i ¼ 1; 2;y; n � 1: ð1Þ
Consider the following piecewise rational cubic func-
tion:
sðxÞ � siðxÞ ¼PiðyÞQiðyÞ
; ð2Þ
where
PiðyÞ ¼ fið1� yÞ3 þ viViyð1� yÞ2
þ wiWiy2ð1� yÞ þ fiþ1y
3;
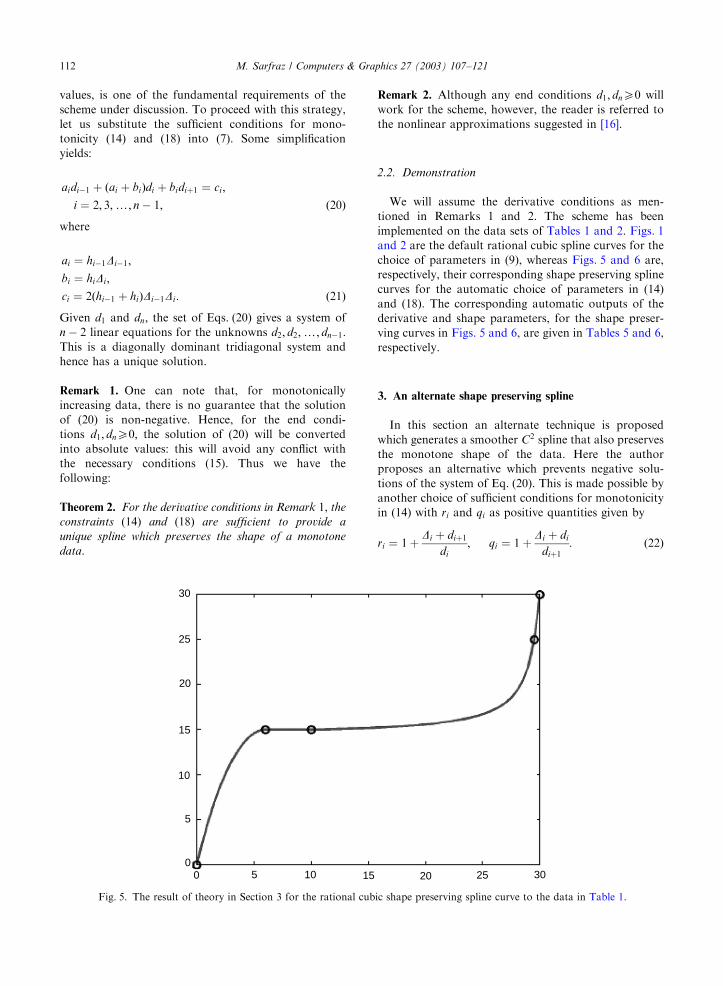
Table 1
Data set taken at random
i 1 2 3 4 5
xi 0 6 10 29.5 30
yi 0.01 15 15 25 30
30
20
10
0
-10
-20
-300 5 10 15 20 25 30
Fig. 1. The default rational cubic spline for data in Table 1.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121108
QiðyÞ ¼ ð1� yÞ3 þ viyð1� yÞ2
þ wiy2ð1� yÞ þ y3;
Vi ¼ fi þhidi
vi
; Wi ¼ fiþ1 �hidiþ1
wi
; ð3Þ
y ¼x � xi
hi
: ð4Þ
The function in (2) is the Hermite interpolant
sAC1½x1; xn� as it satisfies the following C1 interpolatory
properties:
sðxiÞ ¼ fi; sðxiþ1Þ ¼ fiþ1;
sð1ÞðxiÞ ¼ di; sð1Þðxiþ1Þ ¼ diþ1: ð5Þ
Here sð1Þ denotes the first derivative of s with respect to
x; and di denotes derivative value given at the knot xi:The parameters vi’s, wi’s, and the derivatives di’s are
to be chosen such that the monotonic shape is preserved
by the interpolant (2). One can note that when vi ¼wi ¼ 3; the rational function obviously becomes the
standard cubic Hermite polynomial. Variation for the
values of vi’s and wi’s control (tighten or loosen) the
curve at different segments of the curve. For detailed
analysis of the shape parameters, the reader is referred
to [16].
In most applications, the derivative parameters fdigare not given and hence must be determined either from
the given data ðxi; fiÞ; i ¼ 1; 2;y; n; or by some other
means. In this article, they are computed exactly from
the system of equations which arises after applying the
splining constraints:
sð2ÞðxiþÞ ¼ sð2Þðxi�Þ; i ¼ 2; 3;y; n � 1: ð6Þ
The C2 constraints then lead to the consistency
equations:
hidi�1 þ ½hiðwi�1 � 1Þ þ hi�1ðvi � 1Þ�di þ hi�1diþ1
¼ hivi�1Di�1 þ hi�1wiDi; i ¼ 2; 3;y; n � 1: ð7Þ
For given appropriate end conditions d1 and dn; thissystem of equations is a tridiagonal linear system. This is
also diagonally dominant for the following constraints
on the shape parameters:
vi ;wi > 2; i ¼ 1; 2;y; n � 1; ð8Þ
and hence has a unique solution for the di’s. As far as
the computation method is concerned, it is much more
economical to adopt the LU-decomposition method to
solve the tridiagonal system.
The parametric representation of this rational spline
method has been discussed in detail in [15] for CAD
applications. Therefore, the reader is referred to [15] for
the detailed analysis and demonstration. Demonstration
of the above scheme, in the context of scalar curves, is
referred to [16]. For the demonstration of this C2
rational cubic curve scheme, we will choose the
following value of the shape parameters:
vi ¼ 3 ¼ wi; ð9Þ
and the derivatives will be computed from the system of
Eqs. (7) to generate the initial default curve. This initial
90
80
70
60
50
40
30
20
10
00 2 4 6 8 10 12 14 16
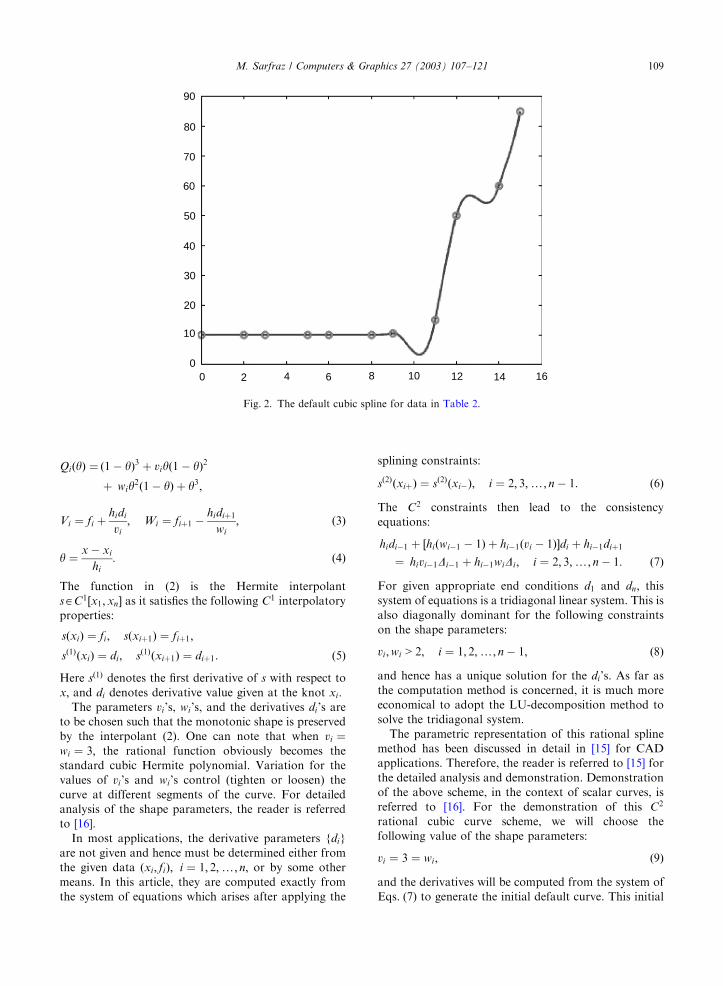
Fig. 2. The default cubic spline for data in Table 2.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 109
default curve is actually the same as a cubic spline curve.
Further modifications can be made by changing these
parameters.
The rational spline method, described above, has
deficiencies as far as the shape preserving issue is
concerned. For example, in Fig. 1, it does not preserve
the shape of the monotonic data of Table 1. Very clearly,
this curve is not preserving the shape of the data. It is
required to assign appropriate values to the shape
parameters so that they generate a data preserved shape.
Similarly an unwanted behaviour can be observed in
Fig. 2 for the data set in Table 2. Thus, it looks as if
ordinary spline schemes do not provide the desired
shape features and hence some further treatment is
required to achieve a shape preserving spline for
monotone data.
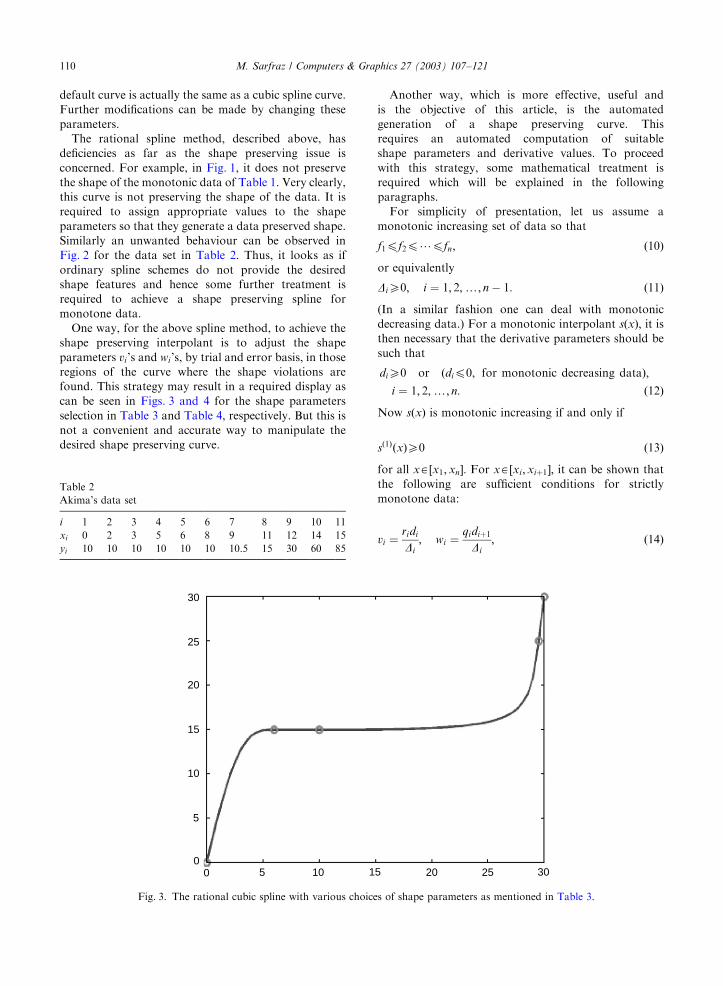
One way, for the above spline method, to achieve the
shape preserving interpolant is to adjust the shape
parameters vi’s and wi’s, by trial and error basis, in those
regions of the curve where the shape violations are
found. This strategy may result in a required display as
can be seen in Figs. 3 and 4 for the shape parameters
selection in Table 3 and Table 4, respectively. But this is
not a convenient and accurate way to manipulate the
desired shape preserving curve.
Another way, which is more effective, useful and
is the objective of this article, is the automated
generation of a shape preserving curve. This
requires an automated computation of suitable
shape parameters and derivative values. To proceed
with this strategy, some mathematical treatment is
required which will be explained in the following
paragraphs.
For simplicity of presentation, let us assume a
monotonic increasing set of data so that
f1pf2p?pfn; ð10Þ
or equivalently
DiX0; i ¼ 1; 2;y; n � 1: ð11Þ
(In a similar fashion one can deal with monotonic
decreasing data.) For a monotonic interpolant sðxÞ; it isthen necessary that the derivative parameters should be
such that
diX0 or ðdip0; for monotonic decreasing dataÞ;
i ¼ 1; 2;y; n: ð12Þ
Now sðxÞ is monotonic increasing if and only if
sð1ÞðxÞX0 ð13Þ
for all xA½x1; xn�: For xA½xi;xiþ1�; it can be shown that
the following are sufficient conditions for strictly
monotone data:
vi ¼ridi
Di
; wi ¼qidiþ1
Di
; ð14Þ
30
25
20
15
10
5
00 5 10 15 20 25 30
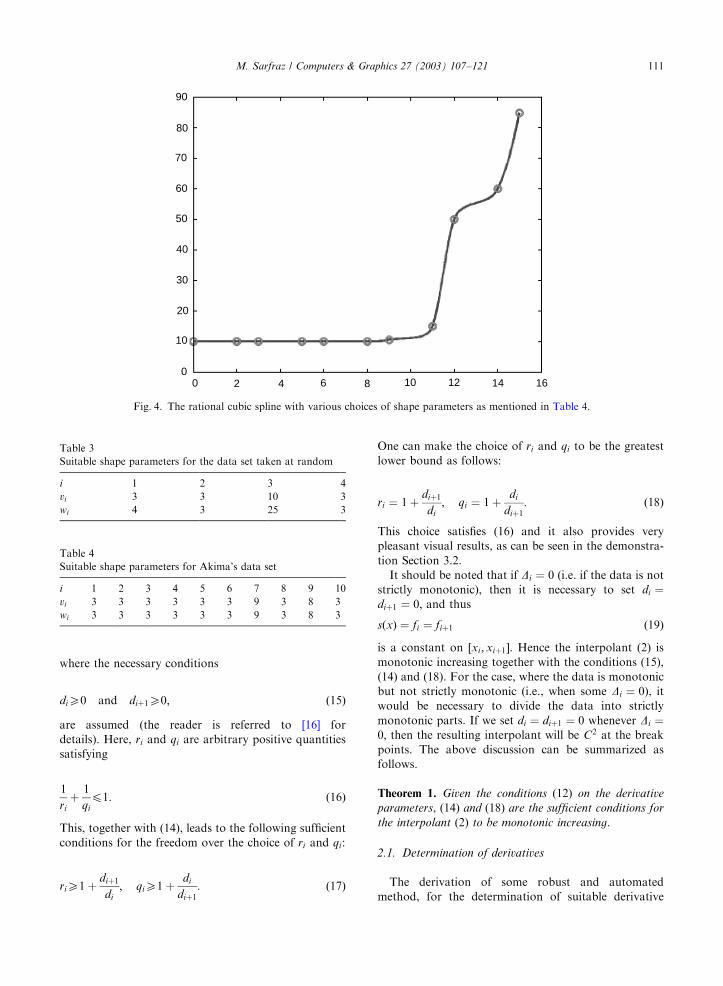
Fig. 3. The rational cubic spline with various choices of shape parameters as mentioned in Table 3.
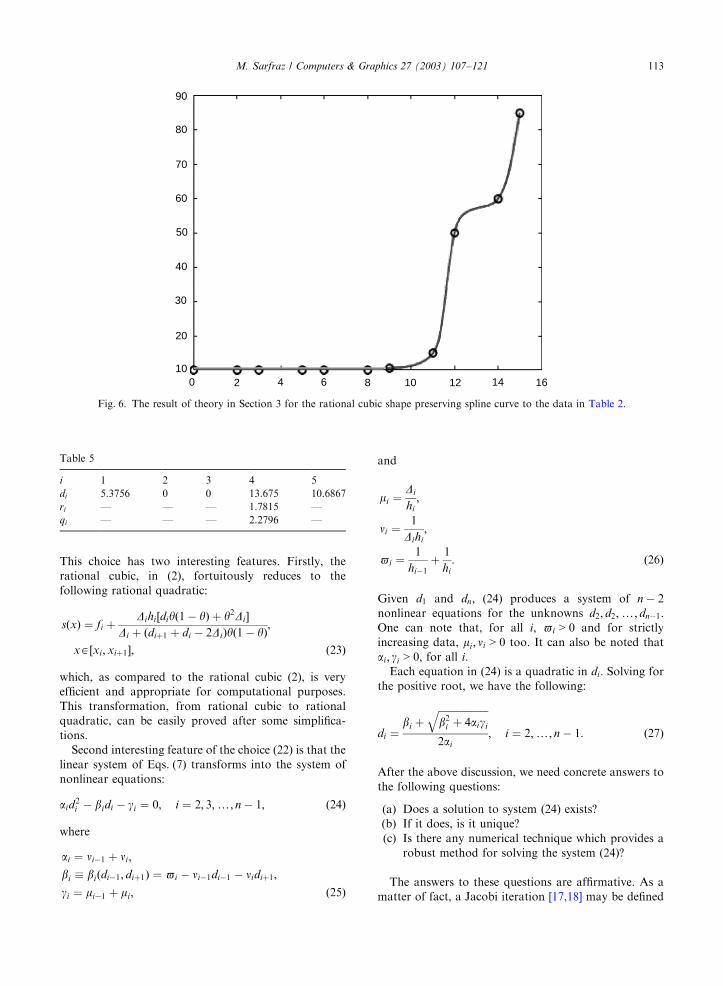
Table 2
Akima’s data set
i 1 2 3 4 5 6 7 8 9 10 11
xi 0 2 3 5 6 8 9 11 12 14 15
yi 10 10 10 10 10 10 10.5 15 30 60 85
M. Sarfraz / Computers & Graphics 27 (2003) 107–121110
where the necessary conditions
diX0 and diþ1X0; ð15Þ
are assumed (the reader is referred to [16] for
details). Here, ri and qi are arbitrary positive quantities
satisfying
1
ri
þ1
qi
p1: ð16Þ
This, together with (14), leads to the following sufficient
conditions for the freedom over the choice of ri and qi:
riX1þdiþ1
di
; qiX1þdi
diþ1: ð17Þ
One can make the choice of ri and qi to be the greatest
lower bound as follows:
ri ¼ 1þdiþ1
di
; qi ¼ 1þdi
diþ1: ð18Þ
This choice satisfies (16) and it also provides very
pleasant visual results, as can be seen in the demonstra-
tion Section 3.2.
It should be noted that if Di ¼ 0 (i.e. if the data is not
strictly monotonic), then it is necessary to set di ¼diþ1 ¼ 0; and thus
sðxÞ ¼ fi ¼ fiþ1 ð19Þ
is a constant on ½xi; xiþ1�: Hence the interpolant (2) is
monotonic increasing together with the conditions (15),
(14) and (18). For the case, where the data is monotonic
but not strictly monotonic (i.e., when some Di ¼ 0), it
would be necessary to divide the data into strictly
monotonic parts. If we set di ¼ diþ1 ¼ 0 whenever Di ¼0; then the resulting interpolant will be C2 at the break
points. The above discussion can be summarized as
follows.
Theorem 1. Given the conditions (12) on the derivative
parameters, (14) and (18) are the sufficient conditions for
the interpolant (2) to be monotonic increasing.
2.1. Determination of derivatives
The derivation of some robust and automated
method, for the determination of suitable derivative
90
80
70
60
50
40
30
20
10
00 2 4 6 8 10 12 14 16
Fig. 4. The rational cubic spline with various choices of shape parameters as mentioned in Table 4.
Table 3
Suitable shape parameters for the data set taken at random
i 1 2 3 4
vi 3 3 10 3
wi 4 3 25 3
Table 4
Suitable shape parameters for Akima’s data set
i 1 2 3 4 5 6 7 8 9 10
vi 3 3 3 3 3 3 9 3 8 3
wi 3 3 3 3 3 3 9 3 8 3
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 111
values, is one of the fundamental requirements of the
scheme under discussion. To proceed with this strategy,
let us substitute the sufficient conditions for mono-
tonicity (14) and (18) into (7). Some simplification
yields:
aidi�1 þ ðai þ biÞdi þ bidiþ1 ¼ ci;
i ¼ 2; 3;y; n � 1; ð20Þ
where
ai ¼ hi�1Di�1;
bi ¼ hiDi;
ci ¼ 2ðhi�1 þ hiÞDi�1Di: ð21Þ
Given d1 and dn; the set of Eqs. (20) gives a system of
n � 2 linear equations for the unknowns d2; d2;y; dn�1:This is a diagonally dominant tridiagonal system and
hence has a unique solution.
Remark 1. One can note that, for monotonically
increasing data, there is no guarantee that the solution
of (20) is non-negative. Hence, for the end condi-
tions d1; dnX0; the solution of (20) will be converted
into absolute values: this will avoid any conflict with
the necessary conditions (15). Thus we have the
following:
Theorem 2. For the derivative conditions in Remark 1, the
constraints (14) and (18) are sufficient to provide a
unique spline which preserves the shape of a monotone
data.
Remark 2. Although any end conditions d1; dnX0 will
work for the scheme, however, the reader is referred to
the nonlinear approximations suggested in [16].
2.2. Demonstration
We will assume the derivative conditions as men-
tioned in Remarks 1 and 2. The scheme has been
implemented on the data sets of Tables 1 and 2. Figs. 1
and 2 are the default rational cubic spline curves for the
choice of parameters in (9), whereas Figs. 5 and 6 are,
respectively, their corresponding shape preserving spline
curves for the automatic choice of parameters in (14)
and (18). The corresponding automatic outputs of the
derivative and shape parameters, for the shape preser-
ving curves in Figs. 5 and 6, are given in Tables 5 and 6,
respectively.
3. An alternate shape preserving spline
In this section an alternate technique is proposed
which generates a smoother C2 spline that also preserves
the monotone shape of the data. Here the author
proposes an alternative which prevents negative solu-
tions of the system of Eq. (20). This is made possible by
another choice of sufficient conditions for monotonicity
in (14) with ri and qi as positive quantities given by
ri ¼ 1þDi þ diþ1
di
; qi ¼ 1þDi þ di
diþ1: ð22Þ
30
25
20
15
10
5
00 5 10 15 20 25 30
Fig. 5. The result of theory in Section 3 for the rational cubic shape preserving spline curve to the data in Table 1.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121112
This choice has two interesting features. Firstly, the
rational cubic, in (2), fortuitously reduces to the
following rational quadratic:
sðxÞ ¼ fi þDihi½diyð1� yÞ þ y2Di�
Di þ ðdiþ1 þ di � 2DiÞyð1� yÞ;
xA½xi; xiþ1�; ð23Þ
which, as compared to the rational cubic (2), is very
efficient and appropriate for computational purposes.
This transformation, from rational cubic to rational
quadratic, can be easily proved after some simplifica-
tions.
Second interesting feature of the choice (22) is that the
linear system of Eqs. (7) transforms into the system of
nonlinear equations:
aid2i � bidi � gi ¼ 0; i ¼ 2; 3;y; n � 1; ð24Þ
where
ai ¼ ni�1 þ ni;
bi � biðdi�1; diþ1Þ ¼ $ i � ni�1di�1 � nidiþ1;
gi ¼ mi�1 þ mi; ð25Þ
and
mi ¼Di
hi
;
ni ¼1
Dihi
;
$ i ¼1
hi�1þ
1
hi
: ð26Þ
Given d1 and dn; (24) produces a system of n � 2
nonlinear equations for the unknowns d2; d2;y; dn�1:One can note that, for all i; $ i > 0 and for strictly
increasing data, mi ; ni > 0 too. It can also be noted that
ai; gi > 0; for all i:Each equation in (24) is a quadratic in di: Solving for
the positive root, we have the following:
di ¼bi þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2i þ 4aigi
q2ai
; i ¼ 2;y; n � 1: ð27Þ
After the above discussion, we need concrete answers to
the following questions:
(a) Does a solution to system (24) exists?
(b) If it does, is it unique?
(c) Is there any numerical technique which provides a
robust method for solving the system (24)?
The answers to these questions are affirmative. As a
matter of fact, a Jacobi iteration [17,18] may be defined
90
80
70
60
50
40
30
20
100 2 4 6 8 10 12 14 16
Fig. 6. The result of theory in Section 3 for the rational cubic shape preserving spline curve to the data in Table 2.
Table 5
i 1 2 3 4 5
di 5.3756 0 0 13.675 10.6867
ri — — — 1.7815 —
qi — — — 2.2796 —
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 113

as follows:
dðkþ1Þi ¼
bðkÞi þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðbðkÞi Þ2 þ 4aigi
q2ai
;
i ¼ 2;y; n � 1 ð28Þ
where
bðkÞi ¼ biðdðkÞi�1; d
ðkÞiþ1Þ; i ¼ 2;y; n � 1; ð29Þ
and
dðkþ1Þ1 ¼ d
ðkÞ1 ¼ d1 and dðkþ1Þ
n ¼ dðkÞn ¼ dn ð30Þ
are the given end conditions. This leads to the following
theorem.
Theorem 3. For strictly increasing data and given
end conditions d1X0 and dnX0; there exists a unique
solution d2;y; dn�1 satisfying the nonlinear consistency
equation (24) and the monotonicity conditions diX0;i ¼ 2; 3;y; n � 1:
Proof. Let us initially define a set of functions Ji; i ¼1; 2;y; n on the domain Rn by
J1ðcÞ ¼ d1;
JiðcÞ ¼biðci�1;ciþ1Þ þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2i ðci�1;ciþ1Þ þ 4aigi
q2ai
;
i ¼ 2;y; n � 1; ð31Þ
JnðcÞ ¼ dn;
where w ¼ ðci ;y;cnÞARn: Let J ¼ ðJ1;y; JnÞ and d ¼ðd1;y; dnÞ: Then the Jacobi iteration (28) takes the form
dðkþ1Þ ¼ Jðd ðkÞÞ:
It can be noted that the numerator in (31) is a
monotonic function of ji ¼ ni�1ci�1 þ niciþ1: Thus forciX0; i ¼ 1;y; n and hence jiX0; we have
JiðcÞpUi; i ¼ 1;y; n; ð32Þ
where
Ui ¼$ i þ ð$2
i þ 4aigiÞ1=2
2ai
; i ¼ 2;y; n � 1;
and U1 ¼ d1;Un ¼ dn: Furthermore, for cipUi; i ¼1;y; n and hence jipni�1Ui�1 þ niUiþ1; we have the
following:
LipJiðcÞ; i ¼ 1;y; n; ð33Þ
where
Li ¼biðUi�1;Uiþ1Þ þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2i ðUi�1;Uiþ1Þ þ 4aigi
q2ai
;
i ¼ 2;y; n � 1;
and L1 ¼ d1;Ln ¼ dn: Thus (32) and (33) leads to:
LipJiðcÞpUi; for all LipcipUi;
where LiX0; i ¼ 1;y; n: This proves that J is a
mapping from I to I where IDRn is an n-dimensional
interval. Moreover, since JiðcÞX0 for all wARn; theabove analysis shows that the Jacobi iteration will
become restricted to I for any initial vector dð0Þ ¼ðdð0Þ
1 ;y; d ð0Þn ÞARn: Next we show that the mapping J
from I to I is a contraction. Let r; sAI and let
V1;i ¼ biðri�1; riþ1Þ; V2;i ¼ biðsi�1; siþ1Þ:
Then, for i ¼ 2;y; n � 1;
JiðrÞ � JiðsÞ
¼V1;i � V2;i þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV21;i þ 4aigi
q�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV22;i þ 4aigi
q2ai
¼ðV1;i � V2;iÞ
2ai
� 1þðV1;i þ V2;iÞ
ðffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV21;i þ 4aigi
qþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV22;i þ 4aigi
qÞ
8><>:
9>=>;;
and
J1ðrÞ � J1ðsÞ ¼ 0;
JnðrÞ � JnðsÞ ¼ 0:
Now
jV1;i � V2;i jai
¼jni�1ðri�1 � si�1Þ þ niðriþ1 � siþ1Þj
ðni�1 þ niÞ
p jjr � sjjN;
and
jV1;i þ V2;i jffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV21;i þ 4aigi
qþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiV22;i þ 4aigi
qp
jV1;i j þ jV2;i jffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðjV1;i j þ jV2;i jÞ
2 þ 8aigi
q¼
1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1þ 8aigi
ðjV1;i jþjV2;i jÞ2
q :
Table 6
i 1 2 3 4 5 6 7 8 9 10 11
di 0 0 0 0 0 0 1.35 10.7658 20.9409 6.4708 36.5963
ri — — — — — — 8.9747 2.9451 1.3090 6.6556 —
qi — — — — — — 1.1254 1.5141 4.2362 1.1768 —
M. Sarfraz / Computers & Graphics 27 (2003) 107–121114

Hence, because of the existence of upper bounds U ’s we
have the following:
jjJðrÞ � JðsÞjjNp1
21þ
1ffiffiffiffiffiffiffiffiffiffiffi1þ l
p( )
jjr� sjjN; ð34Þ
where
l ¼2 mini aigi
ðmaxi;r biðrÞÞ2> 0:
It follows from (34) that J is a contraction mapping on I.
Hence the Jacobi iteration converges to a unique fixed
point d in I, i.e. d ¼ GðdÞ: This d is the unique solution tothe system (24). &
Remark 3. While it is true that a nonlinear quadratic
system may not be as efficient as a linear system
of equations, this computational drawback, is
compensated by the use of a rational quadratic
interpolant (23) instead of a rational cubic (2) through
another interesting feature of the choice of shape
parameters in (22).
Remark 4. It is hoped that the author, in future, will be
able to improve on the numerical technique for resolving
the system of nonlinear Eqs. (24). This work is currently
in progress and will be reported in a future paper.
4. Better accuracy
In this section we establish error bounds for the
rational cubic spline methods of Sections 3 and 4. This
will show that new monotone curve scheme, in Section
4, is superior to the scheme in Section 3 as far as
accuracy is concerned. The main results follows in the
following theorem.
Theorem 4. Let vi;wiXai > �1; fAC4½x1; xn�; and s be
the piecewise rational cubic interpolant function such that
sðxiÞ ¼ f ðxiÞ and sð1ÞðxiÞ ¼ di; i ¼ 1; 2;y; n: Then for
xA½xi; xiþ1� and
bi ¼ð1þ aiÞ=4 if � 1oaio3;
1 if aiX3;
(
jf ðxÞ � sðxÞjphi
4bi
gi þEðf Þ98
�;
where
gi ¼ maxðjf ð1Þi � di j; jf
ð1Þiþ1 � diþ1jÞ;
Eðf Þ ¼ fh3i jjfð4Þjjð1þ jai � 3j=4Þ þ 4jai � 3jðh2l jjf
ð3Þjj
þ 3hi jjf ð2ÞjjÞg;
and the symbol jj:jj denotes the uniform norm.
Proof. The proof of the theorem is highly mathematical
and hence is left to avoid unnecessary length. &
The following result follows directly from the above
Theorem.
Corollary 5. Let xA½xi;xiþ1�; and m ¼ 2; 3; then if gi ¼OðhmÞ; and ai � 3 ¼ Oðhm�1Þ; the error bounds are
achieved as jf ðxÞ � sðxÞj ¼ Oðhmþ1Þ:
Remark 5. It is worth to note that, in Section 4, vi ¼1þ di þ diþ1=Wi ¼ wi: Hence, the choice vi ¼ ai ¼ wi;leads to the following:
ai � 3 ¼ �2þdi þ diþ1
Wi
:
It can be also shown that
ai � 3 ¼ ðdi � fð1Þ
i þ diþ1 � fð1Þ
iþ1Þ=jWi j þ Oðh2i Þ:
Remark 6. The above corollary shows the superiority of
the method of Section 4 over the method of Section 3
with an error bound Oðh2Þ: It can be seen that the error
bound of the method in Section 3 is only Oð1Þ:
5. Demonstrations
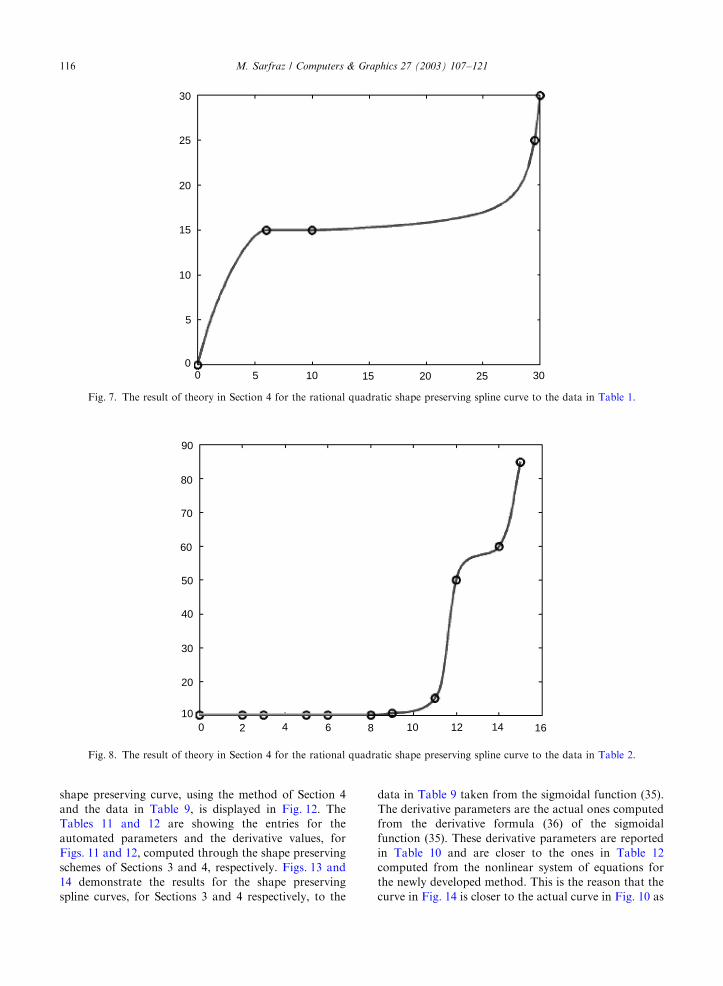
The new monotone curve scheme, in Section 4, has
been successfully implemented for the C2 spline case.
This can be seen in the curves in Figs. 7 and 8
corresponding to the data in Tables 1 and 2 respectively.
Their corresponding traditional cubic spline versions, as
explained in Section 2, are demonstrated in Figs. 1 and 2
respectively. It is quite clear that the ordinary spline
versions are not suitable for preserving the monotone
shape of the data. However, one can observe the shape
preserving curves in Figs. 5 and 7, and Figs. 6 and 8
drawn by old and new methods respectively. There is
hardly much difference, both curve schemes provide
visually pleasing results.
To see the power of the new method further, consider
the data in Table 7, arose from the following sigmoidal
function:
f ðxÞ ¼ ð1þ 2e�3ðx�6:7ÞÞ�1=2: ð35Þ
One can easily compute its derivative as follows:
f ð1ÞðxÞ ¼ 3e�3ðx�6:7Þð1þ 2e�3ðx�6:7ÞÞ�3=2: ð36Þ
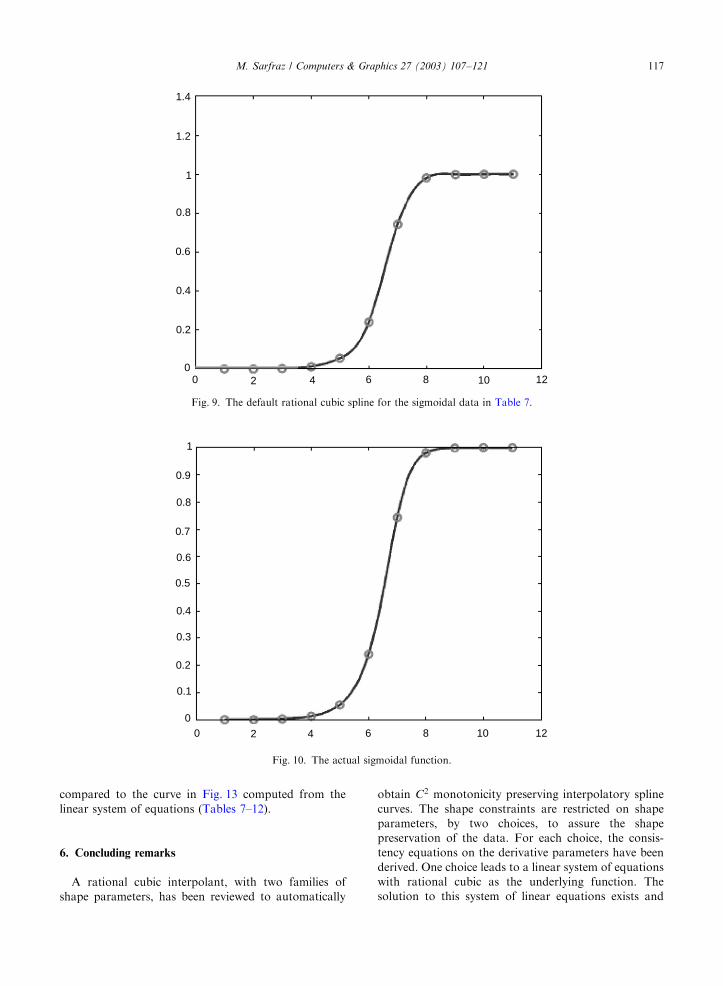
Fig. 9 demonstrates the ordinary cubic spline curve to
the data of in Table 9 taken from the sigmoidal function
(35). The sigmoidal function (35) is shown in Fig. 10.
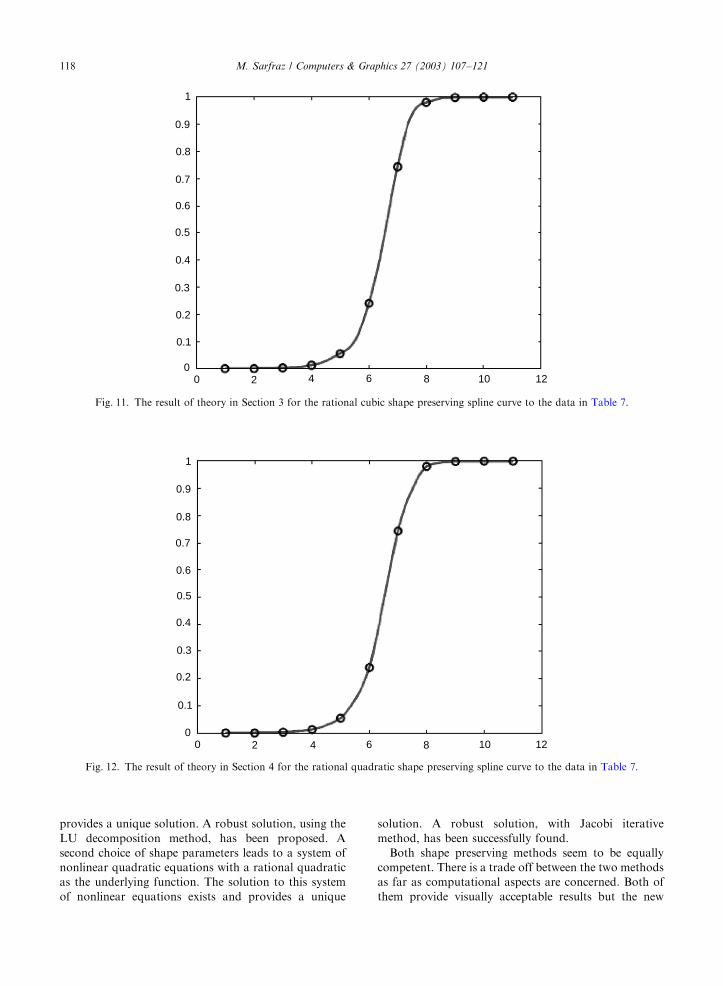
The shape preserving curve, using the method of Section
3 and the data in Table 9, is presented in Fig. 11. The
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 115
shape preserving curve, using the method of Section 4
and the data in Table 9, is displayed in Fig. 12. The
Tables 11 and 12 are showing the entries for the
automated parameters and the derivative values, for
Figs. 11 and 12, computed through the shape preserving
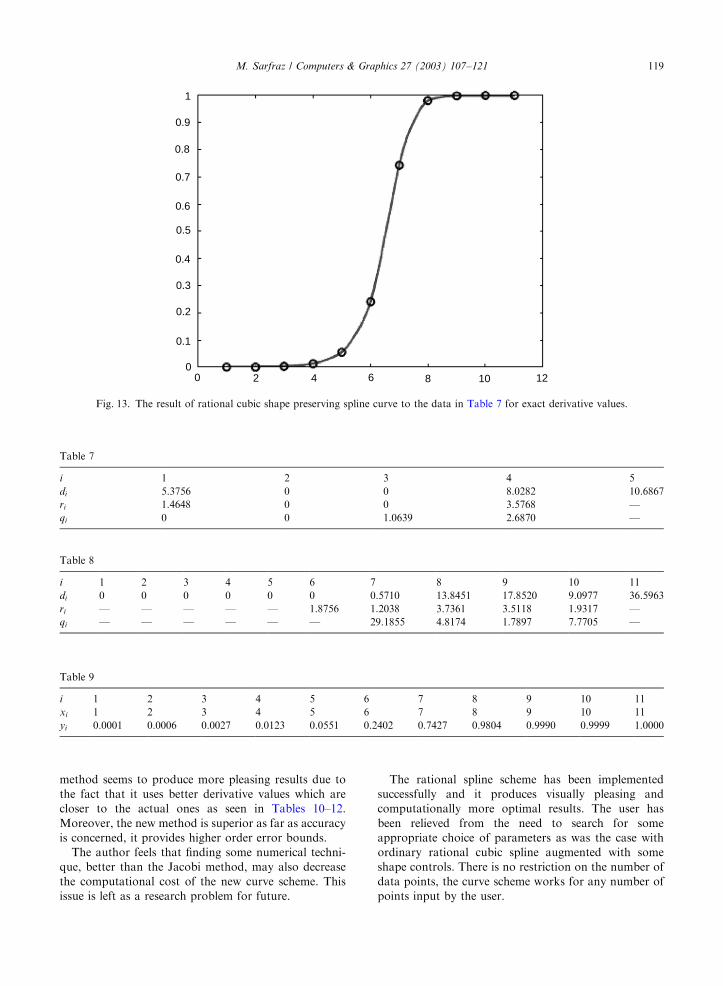
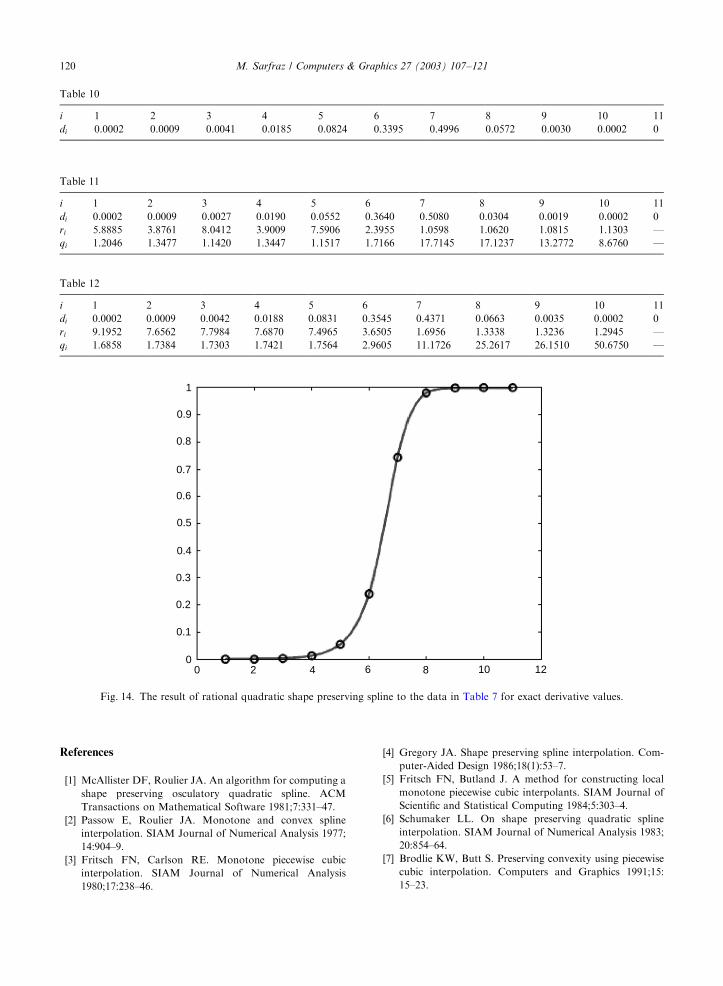
schemes of Sections 3 and 4, respectively. Figs. 13 and
14 demonstrate the results for the shape preserving
spline curves, for Sections 3 and 4 respectively, to the
data in Table 9 taken from the sigmoidal function (35).
The derivative parameters are the actual ones computed
from the derivative formula (36) of the sigmoidal
function (35). These derivative parameters are reported
in Table 10 and are closer to the ones in Table 12
computed from the nonlinear system of equations for
the newly developed method. This is the reason that the
curve in Fig. 14 is closer to the actual curve in Fig. 10 as
30
25
20
15
10
5
00 5 10 15 20 25 30
Fig. 7. The result of theory in Section 4 for the rational quadratic shape preserving spline curve to the data in Table 1.
90
80
70
60
50
40
30
20
100 2 4 6 8 10 12 14 16
Fig. 8. The result of theory in Section 4 for the rational quadratic shape preserving spline curve to the data in Table 2.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121116
compared to the curve in Fig. 13 computed from the
linear system of equations (Tables 7–12).
6. Concluding remarks
A rational cubic interpolant, with two families of
shape parameters, has been reviewed to automatically
obtain C2 monotonicity preserving interpolatory spline
curves. The shape constraints are restricted on shape
parameters, by two choices, to assure the shape
preservation of the data. For each choice, the consis-
tency equations on the derivative parameters have been
derived. One choice leads to a linear system of equations
with rational cubic as the underlying function. The
solution to this system of linear equations exists and
1.4
1.2
1
0.8
0.6
0.4
0.2
00 2 4 6 8 10 12
Fig. 9. The default rational cubic spline for the sigmoidal data in Table 7.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 2 4 6 8 10 12
Fig. 10. The actual sigmoidal function.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 117
provides a unique solution. A robust solution, using the
LU decomposition method, has been proposed. A
second choice of shape parameters leads to a system of
nonlinear quadratic equations with a rational quadratic
as the underlying function. The solution to this system
of nonlinear equations exists and provides a unique
solution. A robust solution, with Jacobi iterative
method, has been successfully found.
Both shape preserving methods seem to be equally
competent. There is a trade off between the two methods
as far as computational aspects are concerned. Both of
them provide visually acceptable results but the new
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 2 4 6 8 10 12
Fig. 11. The result of theory in Section 3 for the rational cubic shape preserving spline curve to the data in Table 7.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 2 4 6 8 10 12
Fig. 12. The result of theory in Section 4 for the rational quadratic shape preserving spline curve to the data in Table 7.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121118
method seems to produce more pleasing results due to
the fact that it uses better derivative values which are
closer to the actual ones as seen in Tables 10–12.
Moreover, the new method is superior as far as accuracy
is concerned, it provides higher order error bounds.
The author feels that finding some numerical techni-
que, better than the Jacobi method, may also decrease
the computational cost of the new curve scheme. This
issue is left as a research problem for future.
The rational spline scheme has been implemented
successfully and it produces visually pleasing and
computationally more optimal results. The user has
been relieved from the need to search for some
appropriate choice of parameters as was the case with
ordinary rational cubic spline augmented with some
shape controls. There is no restriction on the number of
data points, the curve scheme works for any number of
points input by the user.
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 2 4 6 8 10 12
Fig. 13. The result of rational cubic shape preserving spline curve to the data in Table 7 for exact derivative values.
Table 7
i 1 2 3 4 5
di 5.3756 0 0 8.0282 10.6867
ri 1.4648 0 0 3.5768 —
qi 0 0 1.0639 2.6870 —
Table 8
i 1 2 3 4 5 6 7 8 9 10 11
di 0 0 0 0 0 0 0.5710 13.8451 17.8520 9.0977 36.5963
ri — — — — — 1.8756 1.2038 3.7361 3.5118 1.9317 —
qi — — — — — — 29.1855 4.8174 1.7897 7.7705 —
Table 9
i 1 2 3 4 5 6 7 8 9 10 11
xi 1 2 3 4 5 6 7 8 9 10 11
yi 0.0001 0.0006 0.0027 0.0123 0.0551 0.2402 0.7427 0.9804 0.9990 0.9999 1.0000
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 119
References
[1] McAllister DF, Roulier JA. An algorithm for computing a
shape preserving osculatory quadratic spline. ACM
Transactions on Mathematical Software 1981;7:331–47.
[2] Passow E, Roulier JA. Monotone and convex spline
interpolation. SIAM Journal of Numerical Analysis 1977;
14:904–9.
[3] Fritsch FN, Carlson RE. Monotone piecewise cubic
interpolation. SIAM Journal of Numerical Analysis
1980;17:238–46.
[4] Gregory JA. Shape preserving spline interpolation. Com-
puter-Aided Design 1986;18(1):53–7.
[5] Fritsch FN, Butland J. A method for constructing local
monotone piecewise cubic interpolants. SIAM Journal of
Scientific and Statistical Computing 1984;5:303–4.
[6] Schumaker LL. On shape preserving quadratic spline
interpolation. SIAM Journal of Numerical Analysis 1983;
20:854–64.
[7] Brodlie KW, Butt S. Preserving convexity using piecewise
cubic interpolation. Computers and Graphics 1991;15:
15–23.
Table 10
i 1 2 3 4 5 6 7 8 9 10 11
di 0.0002 0.0009 0.0041 0.0185 0.0824 0.3395 0.4996 0.0572 0.0030 0.0002 0
Table 11
i 1 2 3 4 5 6 7 8 9 10 11
di 0.0002 0.0009 0.0027 0.0190 0.0552 0.3640 0.5080 0.0304 0.0019 0.0002 0
ri 5.8885 3.8761 8.0412 3.9009 7.5906 2.3955 1.0598 1.0620 1.0815 1.1303 —
qi 1.2046 1.3477 1.1420 1.3447 1.1517 1.7166 17.7145 17.1237 13.2772 8.6760 —
Table 12
i 1 2 3 4 5 6 7 8 9 10 11
di 0.0002 0.0009 0.0042 0.0188 0.0831 0.3545 0.4371 0.0663 0.0035 0.0002 0
ri 9.1952 7.6562 7.7984 7.6870 7.4965 3.6505 1.6956 1.3338 1.3236 1.2945 —
qi 1.6858 1.7384 1.7303 1.7421 1.7564 2.9605 11.1726 25.2617 26.1510 50.6750 —
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
00 2 4 6 8 10 12
Fig. 14. The result of rational quadratic shape preserving spline to the data in Table 7 for exact derivative values.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121120

[8] Sarfraz M. Convexity preserving piecewise rational inter-
polation for planar curves. Bulletin of the Korean
Mathematical Society 1992;29(2):193–200.
[9] Sarfraz M. Preserving Monotone shape of the Data using
Piecewise Rational Cubic Functions. Computers and
Graphics 1997;21(1):5–14.
[10] Brodlie KW. Methods for drawing curves. In: Earnshaw
RA, editor. Fundamental algorithm for computer
graphics. Berlin: Springer, 1985. p. 303–23.
[11] DeVore A, Yan Z. Error analysis for piecewise quadratic
curve fitting algorithms. Computer Aided Geometric
Design 1986;3:205–15.
[12] Greiner K. A survey on univariate data interpolation and
approximation by splines of given shape. Mathematical
and Computer Modelling 1991;15:97–106.
[13] Constantini P. Boundary-valued shape preserving inter-
polating splines. ACM Transactions on Mathematical
Software 1997;23(2):229–51.
[14] Lahtinen A. Monotone interpolation with application to
estimation of taper curves. Annals of Numerical Mathe-
matics 1996;3:151–61.
[15] Sarfraz M. Interpolatory rational cubic spline with biased,
point and interval tension. Computers and Graphics
1992;16(4):427–30.
[16] Sarfraz M. A rational cubic spline for the visualization of
monotonic data. Computers and Graphics 2000;24(4):509–16.
[17] Press WH, Teukolsky SA, Vetterling WT, Flannery BP.
Numerical recipes in C: The art of scientific computing.
Cambridge: Cambridge University Press, 1992.
[18] Press WH, Teukolsky SA, Vetterling WT, Flannery BP.
Numerical recipes in Fortran 90: The art of parallel
scientific computing. Cambridge: Cambridge University
Press, 1996.
[19] Sarfraz M. Some remarks on a rational cubic spline for the
visualization of monotonic data. Computers and Graphics
2002;26(1):193–7.
M. Sarfraz / Computers & Graphics 27 (2003) 107–121 121