Embed Size (px)
Citation preview

Research ArticleA Relaxed Self-Adaptive Projection Algorithm for Solving theMultiple-Sets Split Equality Problem
Haitao Che 1 and Haibin Chen 2
1School of Mathematics and Information Science, Weifang University, Weifang, Shandong, China2School of Management Science, Qufu Normal University, Rizhao, Shandong, China
Correspondence should be addressed to Haibin Chen; [email protected]
Received 11 March 2020; Accepted 20 April 2020; Published 11 May 2020
Guest Editor: Chuanjun Chen
Copyright © 2020 Haitao Che and Haibin Chen. This is an open access article distributed under the Creative Commons AttributionLicense, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work isproperly cited.
In this article, we introduce a relaxed self-adaptive projection algorithm for solving the multiple-sets split equality problem. Firstly,we transfer the original problem to the constrained multiple-sets split equality problem and a fixed point equation system isestablished. Then, we show the equivalence of the constrained multiple-sets split equality problem and the fixed point equationsystem. Secondly, we present a relaxed self-adaptive projection algorithm for the fixed point equation system. The advantage ofthe self-adaptive step size is that it could be obtained directly from the iterative procedure. Furthermore, we prove theconvergence of the proposed algorithm. Finally, several numerical results are shown to confirm the feasibility and efficiency ofthe proposed algorithm.
1. Introduction
Let H1,H2, andH3 be real Hilbert spaces. For i = 1, 2,⋯, t,j = 1, 2,⋯, r, Ci and Qj are nonempty closed convex subsetsof Hilbert spaces H1 and H2, respectively, and assume thatA : H1 ⟶H3, B : H2 ⟶H3 are two bounded linear opera-tors. The multiple-sets split equality problem (MSSEP) is tofind x and y satisfying the property
x ∈ C =\ti=1
Ci, y ∈Q =\rj=1
Qj such thatAx = By: ð1Þ
When B = I, MSSEP (1) reduces to the multiple-sets splitfeasibility problem
find a point x ∈ C =\ti=1
Ci, Ax ∈Q =\rj=1
Qj, ð2Þ
which is applied to intensity-modulated radiation ther-apy [1–11], signal processing [12–21], and image recon-struction [22–38]. Censor et al. [39] proposed the
proximity function pðxÞ to measure the distance of a pointto all sets
p xð Þ = 12〠
t
i=1li x − PCi
xð Þ�� ��2 + 12〠
r
j=1λj Ax − PQj
Axð Þ��� ���2, ð3Þ
where li > 0 for all i, and λ j > 0 for all j with ∑ti=1 li +
∑rj=1 λj = 1 . To solve (2), they considered the following
constrained MSSEP:
find a point x ∈Ω such that x solves 2ð Þ, ð4Þ
and then presented the projection method
xk+1 = PΩ xk − s∇p xð Þð Þ, ð5Þ
where s > 0 and Ω is an auxiliary simple nonempty closedconvex set with Ω ∩ S ≠∅, and S denotes the solution setof (2). The convergence of the projection method wasobtained under some mild conditions.
HindawiJournal of Function SpacesVolume 2020, Article ID 6183214, 12 pageshttps://doi.org/10.1155/2020/6183214

When t = r = 1, MSSEP (1) reduces to the split equalityproblem which was introduced by Moudafi [40] as follows:
find two points x ∈ C, y ∈Q such thatAx = By, ð6Þ
which is applied to the game theory [41] and optimal con-trol and approximation theory [42]. The following alter-nating CQ algorithm (ACQ) was introduced by Moudafi[40] as follows:
xk+1 = PC xk − γkA∗ Axk − Bykð Þð Þ,
yk+1 = PQ yk + βkB∗ Axk+1 − Bykð Þð Þ,
(ð7Þ
where γk, βk ∈ ðε, min fð1/λAÞ, ð1/λBÞg − εÞ for smallenough ε > 0, A∗ and B∗ denote the adjoint of A and B,respectively. λA and λB are the spectral radiuses of A∗Aand B∗B, respectively. Since the computation of PC andPQ onto a closed convex subset might be hard to beimplemented, Fukushima [43] suggested a way to computethe projection onto a level set of a convex function byconsidering a sequence of projections onto half-spacescontaining the original level set. Then, Moudafi [44] intro-duced the following relaxed alternating CQ algorithm(RACQ):
xk+1 = PCkxk − γkA
∗ Axk − Bykð Þð Þ,yk+1 = PQk
yk + βkB∗ Axk+1 − Bykð Þð Þ,
(ð8Þ
where Ck and Qk are two sequences of closed convex sets.Recently, Dang et al. [45] gave the following relaxed two-
point projection method to solve MSSEP (1):
xk+1 = PΩ1xk − γ 〠
t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ ! !
,
yk+1 = PΩ2yk − γ 〠
r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk+1 − Bykð Þ ! !
,
8>>>>><>>>>>:
ð9Þ
where γ ∈ ð0, min ff1/21/2, 1/ð4kAk2Þð1/4kAk2Þ, 1/ð4kBk2ÞgÞ,Ci,k, i = 1, 2,⋯, r andQj,k, j = 1, 2,⋯, t are two sequences ofclosed convex sets corresponding to Ci and Qj, respec-tively. Ω1 ⊂H1 and Ω2 ⊂H2 are auxiliary simple sets. αi> 0 for all i, and βj > 0 for all j with ∑t
i=1αi +∑rj=1βj = 1.
Under some mild conditions, the weak convergence ofthe algorithm (9) was obtained.
Noting that the determination of the stepsize γ of algo-rithm (9) depends on the operator (matrix) norms ∥A∥ and∥B∥. This implies that if we implement the relaxed two-point projection method (9), one first need to calculate oper-ator norms of A and B, which is in general not an easy workin practice. To overcome this weakness, Lopez et al. [46] andZhao and Yang [47] introduced self-adaptive methods ofwhich the advantage of the methods is that the stepsizes donot need prior knowledge of the operator norms. Motivatedby them, we introduce a relaxed self-adaptive projection
algorithm for solving the multiple-sets split equality problem.First, we transfer the origin problem to the constrainedmultiple-sets split equality problem and establish the fixedpoint equation system. We show the equivalence of the con-strained multiple-sets split equality problem and the fixedpoint equation system. Second, based on the fixed pointequation system, we present a relaxed self-adaptive projec-tion algorithm for solving the constrained multiple-sets splitequality problem, and the convergence of the proposed algo-rithm is obtained. Finally, several numerical results areshown to confirm the feasibility and efficiency of the pro-posed algorithm.
The remainder of this paper is organized as follows. Sec-tion 2 shows some preliminaries and notations used for sub-sequent analysis. In Section 3, we transfer the origin problemto the constrained multiple-sets split equality problem andestablish the fixed point equation system and propose arelaxed self-adaptive projection algorithm for solving theconstrained multiple-sets split equality problem. The conver-gence of the proposed algorithm is obtained. In Section 4,several numerical results are shown to confirm the effective-ness of our algorithm.
2. Preliminaries
Throughout this paper, we use ⟶ and ⇀ to denote thestrong convergence and weak convergence, respectively. Wewrite ωwðxkÞ = fx : ∃xkj ⇀ xg to indicate the weak ω-limit
set of fxkg. For any x ∈H, there exists a unique nearest pointin C, denoted by PCx, such that
∥x − PCx∥ ≤ ∥x − y∥,∀y ∈ C: ð10Þ
It is well known that PC is nonexpansive and firmly non-expansive. Moreover, PC has the following well-known prop-erties (see for example [48]).
Lemma 1. Let C ⊂H be nonempty, closed and convex. Thenfor all x, y ∈H and z ∈ C,
(i) hx − PCx, z − PCxi ≤ 0
(ii) ∥PCx − PCy∥2 ≤ hPCx − PCy, x − yi ;
(iii) ∥PCx − z∥2 ≤ ∥x − z∥2−∥PCx − x∥2:
Definition 2. Letf : H ⟶ Rbe convex. The subdifferential of fat xis defined as
∂f xð Þ = ξ ∈H ∣ f yð Þ ≥ f xð Þ + ξ, y − xh i,∀y ∈Hf g: ð11Þ
An element of ∂f ðxÞ is said to be a subgradient.
Lemma 3. Suppose f : H ⟶ R is a convex function, then it issubdifferentiable everywhere and its subdifferentials are uni-formly bounded set of H:
2 Journal of Function Spaces

3. Algorithm and Its Convergence
In this section, we focus on a relaxed self-adaptive projectionalgorithm and obtain the convergence of the proposed algo-rithm. Following the idea of Censor et al. [39], we give twoadditional closed convex sets Ω1 ⊂H1 and Ω2 ⊂H2 and con-sider the constrained multiple-sets split equality problem
find x ∈Ω1, y ∈Ω2 such that x, yð Þ solves 1ð Þ, ð12Þ
where the sets Ci and Qj can be expressed by
Ci = x ∈H1 ∣ ci xð Þ ≤ 0f g,Qj = y ∈H2 ∣ qj ykð Þ ≤ 0
n o,
ð13Þ
ci : H1 ⟶ R and qj : H2 ⟶ R are convex functions forall i = 1, 2,⋯, t and j = 1, 2,⋯, r, and Γ denotes the solutionset of (32). Define
Ci,k = x ∈H1 ∣ ci xkð Þ + ξi,k, x − xk� �
≤ 0� �
, ð14Þ
where ξi,k ∈ ∂ciðxkÞ and
Qj,k = y ∈H2 ∣ qj ykð Þ + ηj,k, y − ykD E
≤ 0n o
, ð15Þ
where ηj,k ∈ ∂qjðykÞ. It is easily seen that Ci ⊂ Ci,k and Qj ⊂Qj,k for all k. Notice that Ci,k andQj,k are half-spaces and thusthe corresponding projections have closed-form expressions.Hence, we focus on the following multiple-sets split equalityproblem (CMSSEP):
find x ∈Ω1, y ∈Ω2 to solve x
∈ C =\ti=1
Ci,k, y ∈Q =\rj=1
Qj,ksuch thatAx = By:
ð16Þ
Now, we define the proximity function pkðx, yÞ:
pk x, yð Þ = 12〠
t
i=1αi x − PCi,k
xð Þ��� ���2 + 1
2〠r
j=1βj y − PQj,k
yð Þ��� ���2
+ 12 Ax − Byk k2,
ð17Þ
where αi > 0 for all i, and βj > 0 for all j with ∑ti=1 αi +∑r
j=1βj = 1.
Using the proximity function pkðx, yÞ, we can obtain thefollowing technical lemmas.
Lemma 4. Assume that (16) is consistent (i.e.,(16) has a solu-tion) and denotes its solution set by Γ. If ðx,yÞ ∈ Γ, then itsolves the fixed point equation system
x = PΩ1x − λ 〠
t
i=1αi x − PCi,k
xð Þ� �
+ AT Ax − Byð Þ ! !
,
y = PΩ2y − β 〠
r
j=1βj y − PQj,k
yð Þ� �
− BT Ax − Byð Þ ! !
:
8>>>>><>>>>>:
ð18Þ
Proof. To solve the problem (16), we consider the minimiza-tion problem
min pk x, yð Þ ∣ x ∈Ω1, y ∈Ω2f g: ð19Þ
(19) leads to the following unconstrained optimizationproblem:
minx∈Ω1,y∈Ω2
δΩ1xð Þ + δΩ2
yð Þ + pk x, yð Þ� �, ð20Þ
where δΩiis a indicator function of Ωi for i = 1, 2 defined by
δΩixð Þ =
0, x ∈Ωi,+∞, otherwise:
(ð21Þ
Note that ∂δΩ1ðxÞ =NΩ1
ðxÞ and ∂δΩ2ðyÞ =NΩ2
ðyÞ,where NΩ1
and NΩ2are the normal cone of the convex sets
Ω1 and Ω1, respectively. From the optimality conditions of(20), it yields
0 ∈ 〠t
i=1αi x − PCi,k
xð Þ� �
+ AT Ax − Byð Þ + ∂δΩ1xð Þ,
0 ∈ 〠r
j=1βj y − PQj,k
yð Þ� �
− BT Ax − Byð Þ + ∂δΩ2yð Þ,
8>>>>><>>>>>:
ð22Þ
which means that, for λ > 0, β > 0,
x − λ 〠t
i=1αi x − PCi,k
xð Þ� �
+ AT Ax − Byð Þ !
= x + λ∂δΩ1xð Þ,
y − β 〠r
j=1βj y − PQj,k
yð Þ� �
− BT Ax − Byð Þ !
= y + β∂δΩ2yð Þ,
ð23Þ
that is,
x = I + λNΩ1
−1 x − λ 〠t
i=1αi x − PCi,k
xð Þ� �
+ AT Ax − Byð Þ ! !
,
y = I + βNΩ2
−1 y − β 〠r
j=1βj y − PQj,k
yð Þ� �
− BT Ax − Byð Þ ! !
:
ð24Þ
3Journal of Function Spaces

Since ðI + λNΩ1Þ−1 = PΩ1
and ðI + βNΩ2Þ−1 = PΩ2
, weobtain
x = PΩ1x − λ 〠
t
i=1αi x − PCi,k
xð Þ� �
+ AT Ax − Byð Þ ! !
,
y = PΩ2y − β 〠
r
j=1βj y − PQj,k
yð Þ� �
− BT Ax − Byð Þ ! !
:
8>>>>><>>>>>:
ð25Þ
Thus, the desired result can be obtained.The following lemma reveals that ESEP (16) is equivalent
to the fixed point equation system (18).
Lemma 5. Assume that the problem (16) is consistent. ðx∗, y∗Þ∈ Γ solves ESEP (2) if and only if ðx∗, y∗Þ solves the fixed pointequation system (18).
Proof. From Lemma 4, we reveal that ðx∗, y∗Þ can solve (16);it also can solve (18). Next, we will prove that ðx∗, y∗Þ cansolve (18), it also can solve (16). Obviously, one has x∗
∈Ω1, and y∗ ∈Ω2. It follows from the proposition of pro-jection that
x∗ − λ 〠t
i=1αi x∗ − PCi,k
x∗ð Þ� �
+ AT Ax∗ − By∗ð Þ !
− x∗, u − x∗* +
≤ 0, u ∈ Γ,
y∗ − β 〠r
j=1βj y∗ − PQj,k
y∗ð Þ� �
− BT Ax∗ − By∗ð Þ !
− y∗, v − y∗* +
≤ 0, v ∈ Γ:
8>>>>><>>>>>:
ð26Þ
which means
−λ 〠t
i=1αi x∗ − PCi,k
x∗ð Þ� �
+ AT Ax∗ − By∗ð Þ !
, u − x∗* +
≤ 0, u ∈ Γ,
−β 〠r
j=1βj y∗ − PQj,k
y∗ð Þ� �
− BT Ax∗ − By∗ð Þ !
, v − y∗* +
≤ 0, v ∈ Γ:
8>>>>><>>>>>:
ð27Þ
Hence, from Lemma 3, we add two inequalities toobtain
〠t
i=1αi x∗ − PCi,k
x∗ð Þ��� ���2 + 〠
r
j=1βj y∗ − PQj,k
y∗ð Þ��� ���2
+ Ax∗ − By∗, Bv − Au + Ax∗ − By∗h i ≤ 0:ð28Þ
Furthermore, from Au = Bv, we deduce
∥x∗ − PCi,kx∗ð Þ∥ = 0, for i = 1, 2,⋯, t,
y∗ − PQj,ky∗ð Þ
��� ���2 = 0, for j = 1, 2,⋯, r,
Ax∗ − By∗k k2 = 0:
ð29Þ
Thus, ðx∗, y∗Þ solves ESEP (16). This completes theproof.
Based on (18), we can introduce a relaxed self-adaptiveprojection algorithm to solve (16), with σk ∈ ð0, 1Þ.
Alggorithm 6. Let x0 ∈H1, y0 ∈H2 be arbitrary. We calculatethe ðk + 1Þth iterate via the following formula
uk = PΩ1xk − λk 〠
t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ ! !
,
xk+1 = γkxk + 1 − γkð Þuk,
vk = PΩ2yk − λk 〠
r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ ! !
,
yk+1 = γkyk + 1 − γkð Þvk,
8>>>>>>>>>>><>>>>>>>>>>>:
ð30Þ
where the stepsize λk is chosen by
with σk ∈ (1, 0).
Next, we will focus on the convergence analysis ofAlgorithm 6.
Theorem 7. Assume limk→∞
γk = 0, ∑∞k=1 γk =∞ and σk ∈ ½M1,
M2� ⊂ ð0, 1Þ, then the sequence ðxk, ykÞ generated by Algo-rithm 6 converges to a solution of (1).
Proof. Taking ðx∗, y∗Þ ∈ Γ, one has
Ax∗ = By∗: ð32Þ
From (30) and the fact that the projection is nonexpan-sive, we have
λk = 2σk∑t
i=1 αi∥xk − PCi,kxkð Þ∥2 +∑r
j=1 βj∥yk − PQj,kykð Þ∥2+∥Axk − Byk∥
2
∥∑ti=1 αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ∥2+∥∑rj=1 βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ∥2= 4σk
pk xk,ykð Þ∥∇pk xk, ykð Þ∥2 , ð31Þ
4 Journal of Function Spaces

uk − x∗k k2 = PΩ1xk − λk 〠
t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ ! !
− x∗�����
�����2
≤ xk − λk 〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ !
− x∗�����
�����2
= xk − x∗∥2 + λkð Þ2∥〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ�����
�����2
− 2λk 〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ, xk − x∗* +
:
ð33Þ
Since
−2λk 〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ, xk − x∗* +
= −2λk 〠t
i=1αi xk − PCi,k
xkð Þ� �
, xk − x∗* +
− 2λk AT Axk − Bykð Þ, xk − x∗� �
= −2λk 〠t
i=1αi xk − PCi,k
xkð Þ, xk − x∗D E
− 2λk Axk − Byk, Axk − Ax∗h i
≤ −2λk 〠t
i=1αi∥xk − PCi,k
xkð Þ∥2 − λk∥Axk − Byk∥2
− λk∥Axk − Ax∗∥2 + λk∥Byk − Ax∗∥2,ð34Þ
together with (33), we deduce
∥uk − x∗∥2 ≤ ∥xk − λk 〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ !
− x∗∥2
= ∥xk − x∗∥2 + λkð Þ2∥〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ∥2
− 2λk 〠t
i=1αi∥xk − PCi,k
xkð Þ∥2 − λk∥Axk − Byk∥2
− λk∥Axk − Ax∗∥2 + λk∥Byk − Ax∗∥2:
ð35Þ
Similarly, we have
∥vk − y∗∥2 = ∥PΩ2yk − λk 〠
r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ ! !
− y∗∥2
≤ ∥yk − λk 〠r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ !
− y∗∥2
≤ ∥yk − y∗∥2 + λkð Þ2∥〠r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð ÞÞ∥2
− 2λk 〠t
i=1βj∥yk − PQj,k
ykð Þ∥2 − λk∥Byk − By∗∥2
− λk∥Axk − Byk∥2 + λk∥Axk − By∗∥2:
ð36Þ
From (35) and (36), it follows
∥uk − x∗∥2 + ∥vk − y∗∥2 ≤ ∥xk − x∗∥2 + ∥yk − y∗∥2
− λk 2 〠t
i=1αi∥xk − PCi,k
xkð Þ∥2 + 〠t
i=1βj∥yk
− PQj,kykð Þ∥2+∥Axk − Byk∥
2!
− λk ∥〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ∥2
+ ∥〠r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ∥2!!
,
ð37Þ
which together with (31) means
∥uk − x∗∥2 + ∥vk − y∗∥2 ≤ ∥xk − x∗∥2 + ∥yk − y∗∥2: ð38Þ
Furthermore, it follows from (31) and (38) that
∥xk+1 − x∗∥2 + ∥yk+1 − y∗∥2 = ∥γkxk + 1 − γkð Þuk− x∗∥2 + ∥γkyk + 1 − γkð Þvk − y∗∥2
≤ γk∥xk − x∗∥2 + 1 − γkð Þ∥uk − x∗∥2
+ γk∥yk − y∗∥2 + 1 − λkð Þ∥vk − y∗∥2
≤ γk ∥xk − x∗∥2 + ∥yk − y∗∥2
+ 1 − γkð Þ ∥uk − x∗∥2 + ∥vk − y∗∥2
≤ ∥xk − x∗∥2 + ∥yk − y∗∥2,
ð39Þ
By induction, one has
∥xk+1 − x∗∥2 + ∥yk+1 − y∗∥2 ≤ ∥x0 − x∗∥2 + ∥y0 − y∗∥2: ð40Þ
Hence, fxng and fyng are bounded. Following (31), (36),and (39), we have
∥xk+1 − x∗∥2 + ∥yk+1 − y∗∥2 ≤ γk ∥xk − x∗∥2 + ∥yk − y∗∥2
+ 1 − γkð Þ ∥uk − x∗∥2 + ∥vk − y∗∥2
≤ ∥xk − x∗∥2
+ ∥yk − y∗∥2 − 1 − γkð Þλk 2 〠t
i=1αi∥xk − PCi,k
xkð Þ∥2
+ 〠t
i=1βj∥yk − PQj,k
ykð Þ∥2 + ∥Axk − Byk∥2!
− λk ∥〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ∥2
+ ∥〠r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ∥2!!
:
ð41Þ
5Journal of Function Spaces

Without loss of generality, we can assume that there isσ > 0 such that 4ð1 − γkÞσkð1 − σkÞ > σ for all k. Settingsk = ∥xk − x∗∥2 + ∥yk − y∗∥2, together with (41), we havethe following inequality
σpk xk,ykð Þð Þ2
∥∇pk xk, ykð Þ∥2 + sk+1 − sk ≤ 0: ð42Þ
Since sk is eventually decreasing, we obtain sk as con-vergent. From (42), we have lim
k→∞pkðxk, ykÞ = 0: Further-
more,
limk→∞
∥xk − PCi,kxkð Þ∥2 = 0, f ori = 1, 2,⋯, t, ð43Þ
limk→∞
∥yk − PQj,kykð Þ∥2 = 0, f orj = 1, 2,⋯, r, ð44Þ
limk→∞
∥Axk − Byk∥2 = 0: ð45Þ
Furthermore,
∥xk+1 − xk∥ = ∥γkxk + 1 − γkð Þuk − xk∥ = 1 − γkð Þ∥uk − xk∥
≤ 1 − γkð Þλk 〠t
i=1αi∥xk − PCi,k
xkð Þ∥+∥AT Axk − Bykð Þ∥ !
,
ð46Þ
which with (41), (45), and the assumption on γk means
limk→∞
∥xk+1 − xk∥2 = 0: ð47Þ
Note that
∥xk+1 − uk∥ = ∥γkxk + 1 − γkð Þuk − uk∥ = γk∥xk − uk∥, ð48Þ
we have
limk→∞
∥xk+1 − uk∥2 = 0: ð49Þ
(47) and (49) imply
limk→∞
∥xk − uk∥2 = 0: ð50Þ
Similarly, we have
limk→∞
∥yk+1 − yk∥2 = 0,
limk→∞
∥yk+1 − vk∥2 = 0,
limk→∞
∥yk − vk∥2 = 0:
ð51Þ
Thus, fxkg and fykg are asymptotically regular.Notice that
〠t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð ÞÞ∥2�����
+ ∥〠r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð ÞÞ����2
≤2 〠t
i=1αi∥ xk, − , PCi,k
; xkð Þ�
∥2 + ∥A∥2∥Axk − Byk∥2
+ 〠r
j=1βj∥yk − PQj,k
ykð Þ∥2 + ∥B∥2∥Axk − Byk∥2!
≤2max 1,∥A∥2 + ∥B∥2� �
〠t
i=1αi∥ xk, − , PCi,k
; xkð Þ�
∥2
+ ∥Axk − Byk∥2 + 〠
r
j=1βj∥yk − PQj,k
ykð Þ∥2!,
ð52Þ
which implies that
λk ≥ σk1
max 1,∥A∥2 + ∥B∥2� � : ð53Þ
Moreover, it follows from (22) that
∥xk+1 − xk
λk∥ = 1 − γkð Þ 1
λk∥uk − xk∥≤ 1 − γkð Þ
� 〠t
i=1αi∥xk − PCi,k
xkð Þ∥ + ∥AT Axk − Bykð Þ∥ !
,
ð54Þ
which with (43), (45), and the assumption on γk yields
limk→∞
∥xk+1 − xk
λk∥ = 0: ð55Þ
Similarly, one has
limk→∞
∥yk+1 − yk
λk∥ = 0: ð56Þ
Let �x and �y be, respectively, weak cluster points ofthe sequences fxkg and fykg, then there exist two subse-quences of fxkg and fykg (again labeled fxkg and fykgwhich converge weakly to �x and �y). Next, we will showthat ð�x, �yÞ ∈ Γ. It follows from (30) that
6 Journal of Function Spaces

xk+1 − xkλk 1 − γkð Þ − λk 〠
t
i=1αi xk − PCi,k
xkð Þ� �
+ AT Axk − Bykð Þ !
∈NΩ1
xk+1 − γkxk1 − γk
� �,
yk+1 − ykλk 1 − γkð Þ − λk 〠
r
j=1βj yk − PQj,k
ykð Þ� �
− BT Axk − Bykð Þ !
∈NΩ2
yk+1 − γkyk1 − γk
� �:
ð57Þ
From the graphs of the maximal monotone operators,NC andNQ are weakly-strongly closed, and by passing tothe limit in the last inclusions, we obtain that �x ∈Ω1 and�y ∈Ω2.
On the other hand, from Lemma 1 and the definition ofCi,k, one has
ci xkð Þ ≤ ξi,k, xk − PCi,kxkð Þ
D E≤ ∥ξi,k∥∥xk − PCi,k
xkð Þ∥≤M1∥xk − PCi,k
xkð Þ∥,ð58Þ
whereM satisfies ∥ξi,k∥≤M1 for all k. The lower semicontinu-ity of function ciðxÞ and (41) assert that
ci �xð Þ ≤ lim infk→∞
ci xkð Þ ≤ 0: ð59Þ
Thus, �x ∈ Ci for i = 1, 2,⋯, t. Likewise, we can obtain
qj xkð Þ ≤ ηj,k, yk − PQj,kykð Þ
D E≤ ∥ηj,k∥∥yk − PQj,k
ykð Þ∥≤M2∥yk − PQj,k
ykð Þ∥,ð60Þ
where M2 satisfies ∥ηj,k∥≤M2 for all k. The lower semiconti-nuity of function qjðxÞ and (42) lead to
qi �yð Þ ≤ lim infk→∞
qi ykð Þ ≤ 0: ð61Þ
Thus, �y ∈Qj for j = 1, 2,⋯, r. Moreover, the weak con-vergence of Axk − Byk to A�x − B�y and the lower semicontinu-ity of the squared norm imply
∥A�x − B�y∥≤lim infk→∞
∥Axk − Byk∥ = 0, ð62Þ
hence, ð�x, �yÞ ∈ Γ. This completes the proof.
4. Numerical Examples
We are in a position to show numerical examples to demon-strate the performance and convergence of Algorithm 6. Thewhole programs are written in MATLAB 7.0. All the numer-ical results are carried out on a personal Lenovo computerwith Intel®Core™ i7-7500U CPU 2.70GHz and RAM
4.00GB. We denote the vector with all elements 1 by e inwhat follows.
Example 8. Let
A =3 −1 22 1 03 0 3
0BB@
1CCA, B =
4 −4 2 13 −1 4 35 1 0 4
0BB@
1CCA ð63Þ
C1 = fx ∈ R3 ∣ x1 + 5x22 + 4x3 ≤ 0g, C2 = fx ∈ R3 ∣ 3x1 +10x3 ≤ 0g,Q1 = fy ∈ R4 ∣ 2y1 − 3y2 − 2y3 +4y4 ≤ 0g, andQ2 =fy ∈ R4 ∣ 2y21 − y2 + 4y3 − 3y4 ≤ 0g. Find x ∈ C = C1 ∩ C2, y ∈Q =Q1 ∩Q2 such that Ax = By.
Example 9. Let
A =
0:2620 0:0268 0:2589
0:5697 0:5004 0:0458
0:3595 0:8270 0:2464
0BBB@
1CCCA,
B =
0:6607 0:0130 0:0335 0:9213
0:3294 0:7180 0:4060 0:9840
0:6594 0:3911 0:7163 0:9834
0BBB@
1CCCA
ð64Þ
C1 = fx ∈ R3 ∣ x41 + x22 − 2x23 − 1 ≤ 0g, C2 = fx ∈ R3 ∣ 2x21+ x32 − 3x23 − 1 ≤ 0g,Q1 = fy ∈ R4 ∣ 2y31 − y22 + 2y33 + 6y4 − 2 ≤0g, andQ2 = fy ∈ R4 ∣ 2y21 + 3y23 + 2y24 − 2 ≤ 0g. Find x ∈ C =C1 ∩ C2, y ∈Q =Q1 ∩Q2 such that Ax = By:
Example 10. Let A = ðaijÞJ×N and B = ðbijÞJ×M . C1 = fx1 ∈ RN
∣∥x1∥≤2g, C2 = fx2 ∈ RN ∣−e ≤ x2 ≤ 3eg:Q1 = fy1 ∈ RM∣−2e ≤y1 ≤ 6eg, and Q2 = fy2 ∈ RM ∣∥y2∥≤4g, where faijg, fbijg ∈ð0, 1Þ are all generated randomly; J , N and M are pos-itive integers. Find x ∈ C = C1 ∩ C2, y ∈Q =Q1 ∩Q2 suchthat Ax = By:
In this example, we consider J = 10,N = 10, andM = 20 ;J = 20,N = 30, andM = 40 ; and J = 40,N = 50, andM = 60and three initial values:
(i) Case 1 x = onesðN , 1Þ, y = onesðM, 1Þ ;(ii) Case 2 x = 10 ∗ onesðN , 1Þ, y = 10 ∗ onesðM, 1Þ ;(iii) Case 3 x = −10 ∗ onesðN , 1Þ, y = −10 ∗ onesðM, 1Þ:We take Ω1 = C1,n, Ω2 =Q1,n when the algorithm iterates
to step n, γk = 1/20k, σk = ð1/4Þ + ð1/2kÞ, α1 = α2 = β1 = β2 =1/4 in Algorithm 6. In the following tables and figures, wedenote Algorithm 6 and the algorithm in reference [45] byQSPA and RTPPM, respectively. And we set }n}, }s} and }
x∗, } and }y∗} to express the number of iteration, CPU timein seconds, and the final solution, respectively. Init. denotethe initial points, and pkðx, yÞ ≤ ε = 10−4 is used as the stop
7Journal of Function Spaces

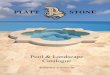
criterion. The numerical results can be seen from Tables 1–3and Figures 1–4. For Figures 3 and 4, take J = 20,N = 30,andM = 40 in Example 10.
From Tables 1–3, we can see that the iterative numberand CPU time of Algorithm 6 is less algorithm RTPPM.Figures 1–4 indicate that Algorithm 6 is more stable thanRTPPM.
Furthermore, for testing the stationary property of itera-tive number, we carry 500 experiments for the initial pointwhich are presented randomly, such as
x1 = rand 3, 1ð Þ, y1 = rand 4, 1ð Þ, ð65Þ
in Example 9, the results can be found in Figure 1.
Table 3: The numerical results of Example 10.
QSPR with λn QSPR with 0.5 λn RTPPM with λnJ N M n s n s n s
Case 1
10 10 20 30 0:003122 48 0.004302 808 0:05093320 30 40 37 0.005304 94 0.011647 1994 0.258627
40 50 60 91 0.013088 188 0.028659 4014 1.286561
Case 2
10 10 20 56 0.011269 125 0.031055 3236 0.201379
20 30 40 107 0.038957 171 0.039266 1762 0.233102
40 50 60 295 0.041663 351 0.100628 5084 1.673274
Case 3
10 10 20 67 0.008644 98 0.016412 812 0.051558
20 30 40 118 0.015576 178 0.028107 1953 0.270206
40 50 60 233 0.058625 302 0.108850 4176 1.360695
Table 1: The numerical results of Example 8.
Init. QSPR RTPPM
x1 = 0, 0, 0ð ÞT n = 14, s = 0:000671 n = 7684, s = 0:198442
y1 = 1, 0,−1, 1ð ÞTx∗ = 0:0196,−0:0222,−0:0055ð ÞT x∗ = 0:0342,−0:0734,−0:0153ð ÞT
y∗ = 0:0345,0:0119,0:0071,−0:0357ð ÞT y∗ = 0:0509,0:0012,−0:0023,−0:0495ð ÞT
x1 = 0, 1, 1ð ÞT n = 15, s = 0:000636 n = 49, s = 0:001585
y1 = 0, 0, 0, 0ð ÞTx∗ = −0:0750,0:0232,0:0181ð ÞT x∗ = −0:2420,−0:0354,0:0589ð ÞT
y∗ = −0:0279,0:0205,0:0014,−0:0109ð ÞT y∗ = −0:0721,0:0426,−0:0254,−0:0566ð ÞT
x1 = 1, 1, 1ð ÞT n = 258, s = 0:008365 n = 34587, s = 0:816461
y1 = 1, 1,−1,−1ð ÞTx∗ = −0:1554,−0:0125,−0:0255ð ÞT x∗ = 0:0836,−0:1013,−0:0566ð ÞT
y∗ = −0:0951,0:0345,0:0180,−0:0257ð ÞT y∗ = 0:0496,−0:0180,0:0025,−0:0371ð ÞT
Table 2: The numerical results of Example 9.
Init. QSPR RTPPM
x1 = 1, 1, 1ð ÞT n = 16, s = 0:001268 n = 478, s = 0:029797
y1 = 1, 1, 1, 1ð ÞTx∗ = 0:1710,0:1525,0:1824ð ÞT x∗ = 1:2294,0:7761,0:9712ð ÞT
y∗ = 0:1110,0:1218,0:1283,0:0100ð ÞT y∗ = 0:6171,0:7022,0:6533,0:1692ð ÞT
x1 = 10 1, 1, 1ð ÞT n = 37, s = 0:001877 n = 1687, s = 0:079442
y1 = 10 1, 1, 1, 1ð ÞTx∗ = 0:2973,0:3380,0:7617ð ÞT x∗ = 1:5257,0:4196,1:5156ð ÞT
y∗ = 0:6560,0:3316,0:2638,−0:1878ð ÞT y∗ = 0:9622,0:8416,0:2119,0:1513ð ÞT
x1 = 100 1, 1, 1ð ÞT n = 63, s = 0:003101 n = 2651, s = 0:110352
y1 = 100 1, 1, 1, 1ð ÞTx∗ = 0:5363,−0:1663,2:0146ð ÞT x∗ = 1:5276,0:3916,1:5165ð ÞT
y∗ = 0:9380,0:0704,−0:1862,0:0354ð ÞT y∗ = 0:9713,0:8464,0:1785,0:1454ð ÞT
8 Journal of Function Spaces

On the other initial point, such as
x1 = rand 3, 1ð Þ ∗ 10, y1 = rand 4, 1ð Þ ∗ 10, ð66Þ
in Example 9, the results can be found in Figure 2.
Similarly, we carry 500 experiments for the initial pointwhich are presented randomly, such as
x1 = rand N , 1ð Þ, y1 = rand M, 1ð Þ, ð67Þ
in Example 10, the results can be found in Figure 3.
Number of experiment
6
8
10
12
14
16
18
Num
ber o
f ite
ratio
n fo
r QSP
A
0
50
100
150
200
250
300
350
400
450
Num
ber o
f ite
ratio
n fo
r RTP
PM
0 50 100 150 200 250 300 350 400 450 500Number of experiment
0 50 100 150 200 250 300 350 400 450 500
Figure 1: The iteration number of QSPA and RTPPM.
15
20
25
30
35
40
Num
ber o
f ite
ratio
n fo
r QSP
A
0
500
1000
1500
2000
2500
3000
3500
4000
Num
ber o
f ite
ratio
n fo
r RTP
PM
Number of experiment0 50 100 150 200 250 300 350 400 450 500
Number of experiment0 50 100 150 200 250 300 350 400 450 500
Figure 2: The iteration number of QSPA and RTPPM.
50
60
70
80
90
100
110
120
130
140
Num
ber o
f ite
ratio
n fo
r QSP
A
1200
1400
1600
1800
2000
2200
2400
2600
Num
ber o
f ite
ratio
n fo
r RTP
PM
Number of experiment0 50 100 150 200 250 300 350 400 450 500
Number of experiment0 50 100 150 200 250 300 350 400 450 500
Figure 3: The iteration number of QSPA and RTPPM.
9Journal of Function Spaces

On the other initial point, such as
x1 = rand N , 1ð Þ ∗ 10, y1 = rand M, 1ð Þ ∗ 10, ð68Þ
in Example 10, the results can be found in Figure 4.
Data Availability
The data used to support the findings of this study are avail-able from the corresponding author upon request.
Conflicts of Interest
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Authors’ Contributions
Each author equally contributed to this paper and read andapproved the final manuscript.
Acknowledgments
This project is supported by the Natural Science Foundationof China (11401438, 11671228, 11601261, and 11571120),Shandong Provincial Natural Science Foundation(ZR2019MA022), and Project of Shandong Province HigherEducational Science and Technology Program (Grant No.J14LI52).
References
[1] J. R. Palta, T. R. Mackie, and Z. Chen, “Intensity-modulatedradiation therapy-the state of the art,” Medical Physics,vol. 30, no. 12, pp. 3265–3265, 2003.
[2] G. López, V. Martin, and H. Xu, “Iterative algorithms for themultiple-sets split feasibility problem,” Biomedical Mathemat-ics: Promising Directions in Imaging, Therapy Planning andInverse Problems, pp. 243–279, 2009.
[3] X. Zhang, L. Liu, Y. Wu, and Y. Cui, “A sufficient and nec-essary condition of existence of blow-up radial solutions for
a k-Hessian equation with a nonlinear operator,” NonlinearAnalysis: Modelling and Control, vol. 25, pp. 126–143, 2020.
[4] C. Chen, H. Liu, X. Zheng, and H. Wang, “A two-grid MMOCfinite element method for nonlinear variable-order time- frac-tional mobile/immobile advection–diffusion equations,” Com-puters and Mathematics with Applications, vol. 79, no. 9,pp. 2771–2783, 2020.
[5] X. Zhang, J. Xu, J. Jiang, Y. Wu, and Y. Cui, “The convergenceanalysis and uniqueness of blow-up solutions for a Dirichletproblem of the general k-Hessian equations,” Applied Mathe-matics Letters, vol. 102, 2020.
[6] X. Zhang, J. Jiang, Y. Wu, and Y. Cui, “The existence and non-existence of entire large solutions for a quasilinear Schrödingerelliptic system by dual approach,” Applied Mathematics Let-ters, vol. 100, p. 106018, 2020.
[7] J. He, X. Zhang, L. Liu, Y. Wu, and Y. Cui, “A singular frac-tional Kelvin-Voigt model involving a nonlinear operatorand their convergence properties,” Boundary Value Problems,vol. 2019, no. 1, 2019.
[8] X. Zhang, J. Jiang, Y. Wu, and Y. Cui, “Existence and asymp-totic properties of solutions for a nonlinear Schrödinger ellip-tic equation from geophysical fluid flows,” AppliedMathematics Letters, vol. 90, pp. 229–237, 2019.
[9] C. Chen, X. Zhang, G. Zhang, and Y. Zhang, “A two-grid finiteelement method for nonlinear parabolic integro-differentialequations,” International Journal of Computer Mathematics,vol. 96, no. 10, pp. 2010–2023, 2018.
[10] C. Chen, W. Liu, and C. Bi, “A two-grid characteristic finitevolume element method for semilinear advection-dominateddiffusion equations,” Numerical Methods for Partial Differen-tial Equations, vol. 29, no. 5, pp. 1543–1562, 2013.
[11] C. Chen and X. Zhao, “A posteriori error estimate for finitevolume element method of the parabolic equations,” Numeri-cal Methods for Partial Differential Equations, vol. 33, no. 1,pp. 259–275, 2017.
[12] C. Chen, K. Li, Y. Chen, and Y. Huang, “Two-grid finite ele-ment methods combined with Crank-Nicolson scheme fornonlinear Sobolev equations,” Advances in ComputationalMathematics, vol. 45, no. 2, pp. 611–630, 2019.
[13] X. Zhang, Y. Wu, and L. Caccetta, “Nonlocal fractional orderdifferential equations with changing-sign singular perturba-tion,” Applied Mathematical Modelling, vol. 39, no. 21,pp. 6543–6552, 2015.
60
80
100
120
140
160
180
200
220
240N
umbe
r of i
tera
tion
for Q
SPA
1.5
1.6
1.7
1.8
1.9
2
2.1
Num
ber o
f ite
ratio
n fo
r RTP
PM
Number of experiment0 50 100 150 200 250 300 350 400 450 500
Number of experiment0 50 100 150 200 250 300 350 400 450 500
×104
Figure 4: The iteration number of QSPA and RTPPM.
10 Journal of Function Spaces

[14] X. Zhang, L. Liu, Y. Wu, and Y. Cui, “The existence and non-existence of entire large solutions for a quasilinear Schrödingerelliptic system by dual approach,” Journal of MathematicalAnalysis and Applications, vol. 464, no. 2, pp. 1089–1106, 2018.
[15] X. Zhang, L. Liu, Y. Wu, and Y. Cui, “Existence of infinitelysolutions for a modified nonlinear Schrodinger equation viadual approach,” Electronic Journal of Differential Equations,vol. 147, pp. 1–15, 2018.
[16] J. He, X. Zhang, L. Liu, and Y. Wu, “Existence and nonexis-tence of radial solutions of the Dirichlet problem for a classof general k-Hessian equations,” Nonlinear Analysis: Model-ling and Control, vol. 23, no. 4, pp. 475–492, 2018.
[17] X. Zhang, Y. Wu, and Y. Cui, “Existence and nonexistence ofblow-up solutions for a Schrödinger equation involving a non-linear operator,” Applied Mathematics Letters, vol. 82, pp. 85–91, 2018.
[18] T. Ren, S. Li, X. Zhang, and L. Liu, “Maximum and minimumsolutions for a nonlocal p-Laplacian fractional differential sys-tem from eco-economical processes,” Boundary Value Prob-lems, vol. 2017, no. 1, 2017.
[19] X. Zhang, L. Liu, and Y. Wu, “Multiple positive solutions of asingular fractional differential equation with negatively per-turbed term,” Mathematical and Computer Modelling,vol. 55, no. 3-4, pp. 1263–1274, 2012.
[20] H. Che and M. Li, “The conjugate gradient method for splitvariational inclusion and constrained convex minimizationproblems,” Applied Mathematics and Computation, vol. 290,pp. 426–438, 2016.
[21] H. Che, H. Chen, and M. Li, “A new simultaneous iterativemethod with a parameter for solving the extended split equal-ity problem and the extended split equality fixed point prob-lem,” Numerical Algorithms, vol. 79, no. 4, pp. 1231–1256,2018.
[22] X. Xu, F. T. S. Chan, and C. K. Chan, “Optimal option pur-chase decision of a loss-averse retailer under emergent replen-ishment,” International Journal of Production Research,vol. 57, no. 14, pp. 4594–4620, 2018.
[23] H. Che, H. Chen, and Y. Wang, “On the M-eigenvalue estima-tion of fourth-order partially symmetric tensors,” Journal ofIndustrial & Management Optimization, vol. 16, no. 1,pp. 309–324, 2020.
[24] H. Che, H. Chen, and Y. Wang, “M-positive semi-definitenessand M-positive definiteness of fourth-order partially symmet-ric Cauchy tensors,” Journal of Inequalities and Applications,vol. 2019, no. 1, 2019.
[25] H. Che, H. Chen, and Y. Wang, “C-eigenvalue inclusion theo-rems for piezoelectric-type tensors,” Applied Mathematics Let-ters, vol. 89, pp. 41–49, 2019.
[26] W. Wang, H. Chen, and Y. Wang, “A new C-eigenvalue inter-val for piezoelectric-type tensors,” Applied Mathematics Let-ters, vol. 100, p. 106035, 2020.
[27] H. Chen, Z. H. Huang, and L. Qi, “Copositivity detection oftensors: theory and algorithm,” Journal of Optimization The-ory and Applications, vol. 174, no. 3, pp. 746–761, 2017.
[28] H. Chen, Y. Chen, G. Li, and L. Qi, “A semi-definite programapproach for computing the maximum eigenvalue of a class ofstructured tensors and its applications in hypergraphs andcopositivity test,” Numerical Linear Algebra with Applications,vol. 25, no. 1, 2018.
[29] H. Chen, Z. H. Huang, and L. Qi, “Copositive tensor detectionand its applications in physics and hypergraphs,” Computa-
tional Optimization and Applications, vol. 69, no. 1, pp. 133–158, 2018.
[30] H. Chen and Y. Wang, “On computing minimal H-eigenvalueof sign-structured tensors,” Frontiers of Mathematics in China,vol. 12, no. 6, pp. 1289–1302, 2017.
[31] H. Chen, L. Qi, and Y. Song, “Column sufficient tensors andtensor complementarity problems,” Frontiers of Mathematicsin China, vol. 13, no. 2, pp. 255–276, 2018.
[32] C. Wang, H. Chen, Y. Wang, and G. Zhou, “On copositivenessidentification of partially symmetric rectangular tensors,”Journal of Computational and Applied Mathematics, vol. 372,p. 112678, 2020.
[33] K. Zhang, H. Chen, P. Zhao, College of Applied Sciences, Bei-jing University of Technology, Beijing 100124, China, Schoolof Management Science, Qufu Normal University, Rizhao,Shandong 276800, China, and College of Architecture andCivil Engineering, Beijing University of Technology, Beijing100124, China, “A potential reduction method for tensor com-plementarity problems,” Journal of Industrial ManagementOptimization, vol. 15, no. 2, pp. 429–443, 2019.
[34] H. Chen, L. Qi, L. Caccetta, and G. Zhou, “Birkhoff-von Neu-mann theorem and decomposition for doubly stochastic ten-sors,” Linear Algebra and its Applications, vol. 583, pp. 119–133, 2019.
[35] H. Chen and Y. Wang, “High-order copositive tensors and itsapplications,” Journal of Applied Analysis and Computation,vol. 8, no. 6, pp. 1863–1885, 2018.
[36] Y. Wang, L. Caccetta, and G. Zhou, “Convergence analysis of ablock improvement method for polynomial optimization overunit spheres,” Numerical Linear Algebra with Applications,vol. 22, no. 6, pp. 1059–1076, 2015.
[37] Y. Wang, K. Zhang, and H. Sun, “Criteria for strong H-ten-sors,” Frontiers of Mathematics in China, vol. 11, no. 3,pp. 577–592, 2016.
[38] G. Zhou, G. Wang, L. Qi, and M. Alqahtani, “A fast algorithmfor the spectral radii of weakly reducible nonnegative tensors,”Numerical Linear Algebra with Applications, vol. 25, no. 2,2018.
[39] Y. Censor, T. Elfving, N. Kopf, and T. Bortfeld, “The multiple-sets split feasibility problem and its applications for inverseproblems,” Inverse Problems, vol. 21, no. 6, pp. 2071–2084,2005.
[40] A. Moudafi, “Alternating CQ-algorithm for convex feasibilityand split fixed-point problems,” Journal of Nonlinear and Con-vex Analysis, vol. 15, no. 4, pp. 809–818, 2014.
[41] H. Attouch, P. Redont, and A. Soubeyran, “A new class ofalternating proximal minimization algorithms with costs-to-move,” SIAM Journal on Optimization, vol. 18, no. 3,pp. 1061–1081, 2007.
[42] P. L. Combettes, “The foundations of set theoretic estimation,”Proceedings of the IEEE, vol. 81, no. 2, pp. 182–208, 1993.
[43] M. Fukushima, “A relaxed projection method for variationalinequalities,” Mathematical Programming, vol. 35, no. 1,pp. 58–70, 1986.
[44] A. Moudafi, “A relaxed alternating CQ-algorithm for convexfeasibility problems,” Nonlinear Analysis: Theory, Methodsand Applications, vol. 79, pp. 117–121, 2013.
[45] Y. Dang, J. Yao, and Y. Gao, “Relaxed two points projec-tion method for solving the multiple-sets split equalityproblem,” Numerical Algorithms, vol. 78, no. 1, pp. 263–275, 2018.
11Journal of Function Spaces

[46] G. López, V. Martín-Márquez, F. Wang, and H.-K. Xu, “Solv-ing the split feasibility problem without prior knowledge ofmatrix norms,” Inverse Problems, vol. 28, no. 8, 2012.
[47] J. Zhao and Q. Yang, “A simple projection method for solvingthe multiple-sets split feasibility problem,” Inverse Problems inScience and Engineering, vol. 21, no. 3, pp. 537–546, 2013.
[48] K. Goebel and S. Reich, Uniform Convexity, Hyperbolic Geom-etry, and Nonexpansive Mappings, Marcel Dekker, New York,NY, 1984.
12 Journal of Function Spaces