Embed Size (px)
Citation preview

ARTICLE IN PRESS
0925-2312/$ - se
doi:10.1016/j.ne
�CorrespondE-mail addr
Neurocomputing 71 (2008) 743–754
www.elsevier.com/locate/neucom
A robust model of the neuronal regulator of the lower urinary tractbased on artificial neural networks
Francisco Macia Perez, Juan Manuel Garcıa Chamizo, Antonio Soriano Paya,Daniel Ruiz Fernandez�
Tecnologia Informatica y Computacion, University of Alicante, P.O.9903080 Alicante, Spain
Available online 12 November 2007
Abstract
The neuronal regulator of the lower urinary tract is a very complex nervous system that consists of a heterogeneous group of neuronal
centres. We have developed a new system from a model based in a multi-agent system in which each neuronal centre corresponds with
an agent. This system incorporates a heuristic in order to make it more robust in the presence of possible inconsistencies. The heuristic
used is based on a neural network (orthogonal associative memory). Knowledge through training has been added to the system, using
correct patterns of behaviour of the urinary tract and behaviour patterns resulting from dysfunctions in two neuronal centres as a
minimum. The experiments prove that the model is robust and its functioning coincides with the behaviour of the biological system. This
work fulfils the expectations of providing a model of the regulator system that allows breaking the problem into simple modules each
with its own entity.
r 2007 Elsevier B.V. All rights reserved.
Keywords: Neural networks; Biological modeling; Multi-agent systems; Process control
1. Introduction
Artificial Intelligence is complementing, and sometimeseven replacing, statistical methods that are used to solvedifferent urological problems [20]. In this paper, we presenta neural network for controlling the neuronal regulator ofthe lower urinary tract (LUT).
Different biological models of the lower urinary tracthave been presented in various publications [2,6,10,18].Most of these papers do not propose a model in which theneuronal regulator of the LUT works properly beforeneuronal dysfunctions.
A model of the neuronal regulator of the LUT based in amulti-agent system like the proposed in [16] allows toincrease the robustness through the incorporation ofheuristics.
The neuronal regulator of the LUT is a complex systemconstituted by a group of neuronal centres located in a
e front matter r 2007 Elsevier B.V. All rights reserved.
ucom.2007.06.010
ing author.
ess: [email protected] (D. Ruiz Fernandez).
distributed way in the brain, pons area, thoracolumbararea and sacral zone. This complexity makes difficultthe diagnosis of urological dysfunctions with a neuro-logical component. The main objective of the work is togive to urologists a tool that helps them in the hardtask of the diagnosis of this kind of dysfunctions. With thismodel, they can test the response of the model for aurological problem based in a neurological malfunc-tion and then to verify if the results coincide with theones obtained in the urodynamical measures of thepatient. On the other hand the model can be also used toteach to students how the neuronal regulator of the LUTworks.In the following sections, we briefly describe the
performance of the neuronal regulator of the LUT. Wepresent the model based in agents to which we will improvethe robustness. In Section 3, we propose the heuristicthat we incorporate to the model. In Section 4, we showthe results obtained from the experiments. Finally, inSection 5, we offer conclusions and outline the differentareas of research where we are currently involved.

ARTICLE IN PRESSF. Macia Perez et al. / Neurocomputing 71 (2008) 743–754744
2. Background
2.1. Overview of the lower urinary tract
The lower urinary tract carries out two main functions:the storage of urine in the bladder and the outflow of urinethrough the urethra. Micturition is the passing of urinestored in the bladder through the urethra to the exterior.This action depends mainly on coordination between thedetrusor and the external sphincter [1]. The coordination iscarried out by a neuronal control which involves a complexsystem of interconnections and neuronal centres. The LUTcan be divided into two parts: the mechanical system(MLUT) and the neuronal regulator (RLUT). The first onedescribes the biomechanics of the LUT and is related withthe anatomy and physiology of the muscles and tissues thatmake it up. The second one refers to the anatomy andphysiology of the neuronal control pathways, retransmis-sion centres and stimulating and inhibitory areas asso-ciated with micturition [9].
The input and output signals of the model, as well as theinterconnections between centres, change with time. In thestorage phase, as urine enters the bladder (Qi), vesicalpressure (Pves) increases and pressure on the bladder wallis raised. At this point, in order to retain urine, the detrusorpressure and the disabling micturition neuronal signalsincrease. When the micturition process begins, it is possibleto observe coordination between the retaining elements(internal sphincter (IS) and external sphincter (ES)) and theemptying elements (detrusor). This happens in such a waythat the neuronal signals to the internal and externalsphincter are reduced to practically nil while the neuronal
Qi
Au
Pves
IIS
SEE
SIS
Qo
Ad
States of the systems0 ............... s0 s1 s3 s5s4
s'0 Times2
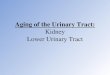
Fig. 1. Main signals and states of the model during a micturition cycle.
signal to the detrusor increases considerably. This is thereason of the change in the pressure which leads to the flowof urine (Qo) from the bladder to the urethra and then out.This process is carried out by afferent signals (detrusorafferent (Ad), urethral afferent (Au)) and efferent signals(stimulation internal sphincter (SIS), inhibition internalsphincter (IIS), stimulation external sphincter (SEE)).Fig. 1 shows the evolution of the main signals during the
filling and emptying phases. These phases allow us todetermine five different states in the system, which arecharacterized by the fact that they are sequential andperiodical. In the state s0 we identify a detrusor relaxationand a sphincter contraction (storage behaviour). State s00represents a state of transition randomly produced by adisruption, such as a cough, sneeze, blow to the abdomen,etc. State s1 is also related with the storage. The start of themicturition can be observed in the state s2 (sphincterrelaxation and detrusor contraction). State s3 representsthe urine outflow. States s4 and s5 represent the end of themicturition and they are related; they are voluntary statesand can be produced more than once. These states are outof present scope.
2.2. Model of the lower urinary tract
The model of the lower urinary tract presented is basedon the agent paradigm. The agents which constitute themulti-agent system correspond to the neuronal centres ofthe RLUT. These agents collect information generated bythe MLUT and process/transmit it back towards themechanical part. Each agent makes a contribution to thesystem, called influence, in such a way that the totalnumber of the different influences will determine theoverall state of the system and the activation or non-activation of the different signals involved. In the process,the model of the lower urinary tract is defined as [16]:
LUT ¼ MLUT;RLUT;MLUTIRLUT
� �(1)
where the MLUT models the mechanical part of the lowerurinary tract, the RLUT the neuronal regulator of thelower urinary tract and the MLUTIRLUT the relationbetween both parts. Since the interface regards the LUTas a system of actions and reactions [16], it is defined as:
MLUTIRLUT ¼X
;G;PD E
(2)
In this Equation S is the set of possible states in whichthe system can stay. G is the set of the possible intentions ofactions (an action proposed by an agent is represented asan intention of modification) in the system. P is the set ofthe actions (plans) that the different agents can executewith the objective of modifying their states.The neuronal regulator of the lower urinary tract is
composed of a set of neuronal centres (NC) that areconstantly perceiving, deliberating and executing.The neuronal centres are modelled as PDE (Perception-
Deliberation-Execution) agents with capacity of memoriz-

ARTICLE IN PRESSF. Macia Perez et al. / Neurocomputing 71 (2008) 743–754 745
ing and decision [5,13]. In this way, a centre aANC isdefined by [16]
a ¼ Fa;Sa;Percepta;Mema;Decisiona;Execa� �
(3)
where Fa corresponds to the set of perceptions; Sa
corresponds to the set of internal status; Percepta provi-des the centre with information about the state ofthe system; Mema allows the centre to show awarenessof the state; Decisiona selects the next influence; andExeca represents the agent’s intention of acting on thesystem. These functions present a general structurethat depends on specified sets and functions of each agent.We can appreciate the internal structure of an agent in theFig. 2.
More specifically, the perception function of an agent awill consist of extracting the sublist of pairs from the stateof the world whose afferent neuronal signals are thedestination of the a agent and whose efferent signals arethe origin. The memorization function will associatethe internal state of the agent with a perception and thedecision function will be in charge of associating a taskwith a perception in a specific internal state. The actions onthe system are carried out by means of the function ofexecution.
Percepta :X! Fa; Mema : Fa � Sa! Sa
Decisiona : Fa � Sa! P; Execa : P� Fa ! G ð4Þ
On the other hand, the mechanical system (MLUT)is defined like a function that from a set of efferentsignals generates afferent signals. This function is namedMLUT and it provides the next state of the systemdepending of the influences of the different agents and thecurrent state:
MLUT :X�G!
X(5)
The new state of the system is the result of evaluating theinfluences contributed by different agents when concur-rently performing their tasks. The state of the system with
α Exec()Decision()Percept()
Mem()
p
�α(t)
Neuronal Centre α
sα(t)
γ(t)
Fig. 2. Internal structure of the neuronal centres used in the model with
the perception (Percept), memorization (Mem), decision (Decision) and
execution (Exec) functions, the state of the system (s), perceptions (f),internal state (s), plan decided (p) and influences (g).
regard to time will be expressed by:
sðtþ 1Þ ¼MLUTðsðtÞ;Yn
i
ExeciðDecisioniðfiðtÞ; siðtÞÞ;fiðtÞÞÞ
s1ðtþ 1Þ ¼Memðf1ðtÞ; s1ðtÞÞ; . . . ;
snðtþ 1Þ ¼MemðfnðtÞ; snðtÞÞ ð6Þ
To validate the model of the LUT, a simulator has beendeveloped using Java as the programming languagetogether with the support of a graphical representationtool. We have carried out different LUT simulations withdata regarding both healthy individuals and those withdysfunctions due to neuronal causes.
2.2.1. Situation without dysfunctions
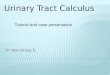
The result of the tests in average working conditions,without dysfunctions, can be observed in Fig. 3. In thestorage phase, the centre remains inhibited, allowing thebladder to be filled. During the emptying phase, the personactivates the micturition centres to contract the detrusor toexpel the urine.In the first part of the storage phase, we can observe that
an increase in urine generates exponential increases inpressure because of the initial stretching of the muscle.When the micturition begins, a contraction of the detrusortakes place generating a great increase in vesical pressure,reaching values of 40 cm of H2O. At the end of the process,the bladder will have practically emptied, maintaining abasal pressure. The urine flows out when the externalsphincter is opened. It can be seen how the output flow ofurine increases to 23ml/seg. As can be observed, urody-namic curves fall within the permitted ranges for theInternational Continence Society.
2.2.2. Situation with neuronal dysfunctions
When there is a lesion that affects interaction among thesacral centres and the rest of the neuronal centres(thoracolumbar centre, pontine centre and suprapontinecentres), interaction ceases. The LUT no longer controlsvoluntary and involuntary areas, but the vesicosomaticguarding reflex and the vesicosimpatic and urethralpar-asympathetic reflexes of micturition remain. A lesion ofthis type usually generates a detrusor- sphincter disinergy[19]. Fig. 4 shows the urodynamic curves of a suprasacrallesion. In it, detrusor-sphincter disinergy can be observed.When detrusor pressure is greater than sphincter pressure,urine loss takes place.Once we have presented the model that can simulate with
accuracy the behaviour of the biological system, we aregoing to propose an improvement of the model in order toavoid general dysfunctions when a centre is not workingproperly.
3. Heuristic
One problem that can be found in the system we arestudying is that a particular component can be unable to

ARTICLE IN PRESS
0 100 200 300 400 500 600 700 800
0
5
10
15
20
25
30
35
40
Vesical pressure
Pre
ssu
re (
cm
H2O
)
0 100 200 300 400 500 600 700 8000
10
20
30
40
50
60
70
External sphincter pressure
Pre
ssu
re
(cm
H2O
)
0 100 200 300 400 500 600 700 8000
5
10
15
20
25F
low
(m
l /
se
c)
0 100 200 30 0 400 500 600 700 800
0
50
100
150
200
250
300
350Vesical volumen
Time (seconds)
Vo
lum
en
(m
l)
Time (seconds) Time (seconds)
Urine outflow
Time (seconds)
Fig. 3. Urodynamic data (vesical volume, vesical pressure, external sphincter pressure, urine outflow) in a situation without dysfunctions.
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754746
contribute its influence because of a dysfunction in one ofthe neuronal centres, or the influence contributed is notcorrect. This problem can affect the functioning of thewhole model.
In order to develop a system that reduces this problem,we will incorporate to the model an artificial neuronalcentre with capacity to simulate the dynamic behaviour ofthe mechanical system; that is, the artificial centre willknow at any moment which are the afferent neuronalsignals that the mechanical system generates from theinfluences contributed by the centres. Since this centre isconnected with all the others, any centre will be able toquery it and to know in what state the system is and whatinfluences will have to contribute. Thus, it will be able todecide the influence with which it would have to contribute,according to the model.
In order to obtain the new neuronal centre, it isnecessary to determine a heuristic to infer the correct
influences. Let’s suppose that the heuristic function capableof contributing the correct influences is obtained from a setof influences of the different agents:
HG :X�G! G (7)
Now, if we replaced the original vector of influences bythe heuristic one in Eq. (6), we would reduce the problemsdescribed above. Then, the equation for the new state willbe:
sðtþ 1Þ ¼MLUT sðtÞ;HGðsðtÞ; gðtÞÞ� �
(8)
Fig. 5 shows, graphically, the structure of the modelincluding the heuristic which increases the robustness of thesystem. The heuristic HG will infer the correct vector ofinfluences from the influences contributed by the differentneuronal centres, whether they are correct or not.Although any classifier could be used as a heuristic, we

ARTICLE IN PRESS
0
5
10
15
20
25
30
35
40
Vesical pressure
4.8
5
5.2
5.4
5.6
5.8
6
6.2
6.4
External sphincter pressure
0
2
4
6
8
10
12F
low
(m
l / sec)
0 100 200 300 400 500 600 700 800
0
20
40
60
80
100
120
140Vesical volumen
Volu
men (
ml)
Time (seconds)
0 100 200 300 400 500 600 700 800
Time (seconds)
0 100 200 300 400 500 600 700 800
Time (seconds)
0 100 200 300 400 500 600 700 800
Time (seconds)
Pre
ssure
(cm
H2O
)
Pre
ssure
(cm
H2O
)
Urine outflow
Fig. 4. Urodynamic data (vesical volume, vesical pressure, external sphincter pressure, urine outflow) with suprasacral dysfunctions.
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754 747
decided to use a neural network because of the high degreeof dispersion among the values of the various vectors andtheir corresponding states. This tool suits to the character-istics of this type of problem because of its high faulttolerance and its great ease in modelling non-linearfunctions [8,14,15]. An interesting point is the fact thatthe neural network used in our model is an OrthogonalAssociative Memory (OAM), whose main advantages areits great capacity for storage and its high noise tolerance.
The function estimated by the neural network has asinput the vector of influences contributed by the centrestogether with the current state of the system. The output isthe estimation of the correct influence vector:
g0 ¼ HGðs; gÞ (9)
where s represents the current state of the system, gthe input (influence vector) of the agents corresponding to
the neuronal centres and g0 the output (influence vector)which the system’s output agents should have contributed(if all the neuronal centres would have functionedcorrectly).The main function of the OAM is to establish associa-
tions between input patterns and intermediate auxiliaryorthogonal vectors, and the associations of those with theoutput patterns. The OAM training phase involvesobtaining two matrices of synaptic weights:
W ¼ f 1ðAÞf 2ðQT Þ; V ¼ f 2ðQÞf 1ðB
T Þ, (10)
where the matrix A represents the input patterns, matrix B
corresponds to the output patterns, the intermediate matrixQ is an orthogonal Householder matrix [12], function f1()is a classic bipolar filter, and function f2() is anotherbipolar filter which depends on the orthogonal matrix used.

ARTICLE IN PRESS
αα3
ec()
α2
ec()
α1
Decision()
s1(t)Mem()�1(t)
p
γ3
γ1
γ2
Π
MLUTHΓ
σ(t+1)
Percept()
σ (t)
γ '(t)
γ(t)
Pe
Fig. 5. Representation of the model with the heuristic HG, the neuronal centres ai, the mechanical system MLUT and the module P to join the influences
of the different agents.
Table 1
Correct training pattern pairs
Input (ai) Output
(bi)
Input (ai) Output
(bi)
Input (ai) Output
(bi)
1 s0 gs0 gs0 6 s0 gs00 gs00 11 s1 gs2 gs22 s3 gs0 gs0 7 s1 gs1 gs1 12 s3 gs2 gs23 s00 gs0 gs0 8 s0 gs1 gs1 13 s3 gs3 gs34 s1 gs0 gs0 9 s2 gs1 gs1 14 s2 gs3 gs35 s00 gs00 gs00 10 s2 gs2 gs2 15 s0 gs3 gs3
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754748
Recall of an unknown pattern ai is obtained directly fromthe equation:
bi ¼ f 1ðf 2ðf 1ðaTi ÞWÞVÞ (11)
In order to obtain the heuristic, we have developeddifferent artificial neuronal networks of simulations fromthe initial regulator. In the training of the network wehave used two types of patterns. The first type is shown inTable 1 and it corresponds to all patterns making up a stateof the system plus a non-dysfunctioning influence vectorwhich is valid for the above state of the system. That is, if,for example, we are in a state of retention (s0), thebeginning of micturition (s2) can not be generated directlywithout having previously undergone a state of retention(s1). The second type of patterns used in the training phasecorresponds to patterns with several types of dysfunctions,randomly introduced, altering the influence vector compo-nents. At the end, we have tested different patterns fromtraining with several types of dysfunctions.
Once we have obtained the heuristic, we introduce it inan artificial neuronal centre, and, in order to achieve therobust model of the RLUT, we incorporate this new centreto the initial model (Eq. (6)). The results of the experimentsare shown in the following section.
4. Experiments
We have performed different recognition tests with therobust model using both correct patterns (Table 1) and alsopatterns with several dysfunctions. Next, we are going toexplain some examples.
4.1. Correct patterns and patterns with a maximum of two
dysfunctions
Fig. 6 presents the results corresponding to the networktrained with correct patterns and patterns with a maximumof two dysfunctions. In this case, between a hundred and athousand series of tests were performed on patterns withany type and any number of dysfunctions, producingaverage values which are approximately the same for all ofthem.Fig. 6a shows the curves of evolution for the patterns
recall belonging to a certain state of the system accordingto the number of dysfunctions introduced. It is possible tonotice that, regardless of the moment the dysfunctionoccurs, and since its number is accumulated, the perfor-mance of the network decreases almost linearly. Theexistence of a linear answer of the network to thedysfunctions allows the system to establish a minimumthreshold that matches up with the acceptable answer ofthe network. This threshold happens to be around fourdysfunctions.Fig. 6b offers the same data but presents dysfunction
curves in the different possible states of the system. Thistime, although the results are perfectly acceptable, we cansee a couple of alterations which should be commentedupon from a more qualitative approach.In the graph in Fig. 6b, it can be clearly seen that the
curve corresponding to patterns with one dysfunction has a70% of success rate in the case 5 (s00gs00), where the

ARTICLE IN PRESS
0
20
40
60
80
100
1 2 3 4 5 6 7 8 9
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Dysfunctions
s1
s0 s'0s2
s3 Average
Correct Patterns
0
20
40
60
80
100
% R
eca
ll%
Re
ca
ll
Curves based on the states
1
8
2 3 4
5 6 7
Curves based on number of dysfunctions
Fig. 6. Training the neural network with up to two dysfunctions (a) Recall
percentage based on the states of the system (b) Recall percentage based
on the number of dysfunction.0
20
40
60
80
100
1 2 3 4 5 6 7 8 9
s1
s0 s'0s3 Average
Curves based on the states
0
20
40
60
80
100
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1
Curves based on number of dysfunctions
8
2 3 4
5 6 7
% R
ecall
% R
ecall
Dysfunctions
Correct Patterns
Fig. 7. Training the neural network with up to four dysfunctions
(a) Recall percentage based on the states of the system (b) Recall
percentage based on the number of dysfunction.
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754 749
network was expected to recognize the vector gs00. This casecorresponds to a state of retention with an increase inpressure on the sphincter to absorb a disruption (cough,sneeze, blow to the abdomen, etc). However, the system isgenerated from a state of retention, and it is importantthat, at least, it keeps that state. If we analyze the vectorsinferred by the network when no recognition has occurred,we find gs0 in each case; that is, the retention state ismaintained and, therefore, it can qualitatively be consid-ered correct and perfectly viable.
In reference to Fig. 6b again, it can be observed that thecurve corresponding to two dysfunctions also presents avery low success rate: 65% for the case 9 (s2gs1). When weanalyze this point, we can see that it corresponds to state s2,where an initiation of micturition process was underway.However, the system turns back to a voluntary retentionstate s1. Upon closely examining the values returned by thenetwork, we can see that, in most cases, where the patterngs1 is not recognized, the vector gs2 is returned. This implies
that the system will find difficult to stop the micturitionprocess once it has begun. The same happens in thebiological process.
4.2. Correct patterns and patterns with a maximum of four
dysfunctions
The recognition experiments with the network trainedwith valid patterns and patterns with four dysfunctions areshown in Fig. 7.In Fig. 7a we can observe that, similarly to the previous
case, the network delivers a linear answer in response to anincrease in the number dysfunctions. In Fig. 7b however,there is a greater dispersion of curves.The results obtained are similar for both networks
(trained with two and with four dysfunctions). However,the network trained with patterns that presented amaximum of two dysfunctions has been able to recognizebetter the patterns with four or less dysfunctions whereas it

ARTICLE IN PRESSF. Macia Perez et al. / Neurocomputing 71 (2008) 743–754750
has had more problems to distinguish patterns with greaternumber of dysfunctions. The network trained with patternsthat presented up to four dysfunctions is able to recognizebetter (with respect to the previous network) any type ofpattern. Nevertheless, the first network is the one thatbetter adapts to the system because there is less chance forcases with more than four dysfunctions to occur in practiceand, in case of appearing, the level of dysfunctions wouldbe so high that take place the model could directly happento control all the neuronal centres.
5. Conclusion
The model of the neuronal regulator of the lower urinarytract based in an artificial neural network is able to workcorrectly with four simultaneous dysfunctions. Moreover,it allows the system to take dynamic control of thosemalfunctioning centres, temporarily correcting and per-forming its activity. Although at first it may seem that theability to detect only four dysfunctions is a restriction, inpractice it is unlikely that so many dysfunctions wouldappear at once. Therefore, the system can gradually absorbthem and even take total control of the RLUT if such ahigh number of dysfunctions were detected.
With this approach a fault tolerant system is established,in the sense that if one or several centres do not workcorrectly the system would tackle these dysfunctions andwould continue working suitably.
In a next research we want to use the structure of themodel presented to study the utility in other human organsand systems like the heart or digestive system.
Acknowledgements
This study has been supported as part of the researchproject GV05/158 by the Office of Science and Technologyof the Autonomous Government of Valencia (Spain).
Appendix
The mechanical system of the lower urinary tract(MSLUT) is defined as a function formed by a set of
Tdet Tdet
Tdet
Tdet
Pves
Rves
Tdet
Tdet
2ΔRvev
Fig. 8. Scheme and model of the bladder and detrusor. Pves: pressure in t
circumference of the bladder.
efferent and afferent signals. This function depends ondynamics of the three elements that make the mechanicalsystem: bladder, proximal urethra and distal urethra. Eachelement has associated a main muscle managed in an activeway by the neuronal regulator: bladder has associated thedetrusor muscle, the proximal urethra has the internalsphincter and the urethra distal has the external sphincter.The mechanical system is based on the active and passive
properties from the muscles of the bladder and the urethra,in the pressures that intervene and the urine flow. Theactive properties depend on the efferent neuronal signals.They are more active in the voiding phase than in the fillingphase [17]. The passive properties depend on the structuralproperties of the muscle. It is possible to distinguish severaltypes of passive properties: elastic [21], viscoelastic [11] andplastic [4].The bladder is covered by smooth muscle called detrusor
(D—Detrusor). Although its shape depends on thequantity of the urine stored and the external pressures,we consider it with spherical shape because simplicitycauses.The detrusor is modelled using a elastic structure made
by a nonlinear spring (PS—Parallel Spring) which is inparallel with another nonlinear element (SS—Serial Spring)and a serial contractile element (CE—Contractile Ele-ment), as it is shown in the Fig. 8. The way of the elementPS represents the elastic properties, while the way SS-CErepresents the viscoelastic properties when CE is not active.The active properties are represented through CE when it isactive [3].The pressure of the bladder (Pves) is obtained using the
Laplace’s law and the consideration that the pressure of theliquid is uniformly distributed over the internal surface,
PvesA ¼ TdetS (12)
Pves is the pressure of the bladder obtained from the stressin the wall of the bladder, A the area of the cross-section inwhich the pressure of the bladder acts, Tdet the stress in thewall of the bladder S the surface of the cross-section wherethe stress actsUsing the previous equation in terms of the elongation of
the circumference of the cross-section of the bladder (LPS)
CESS
PS
he bladderl, Tdet: stress in the wall of the bladder, Rves: radius of the

ARTICLE IN PRESSF. Macia Perez et al. / Neurocomputing 71 (2008) 743–754 751
we have the following:
Pves1
4pL2PS ¼ TdetS (13)
The volume of the wall of the bladder (Vwall) and thesurface of the cross-section of the wall of the bladder (S)and they are calculated as:
Vwall ¼4p3½ðRþ DRÞ3 � ðR� DRÞ3� ¼ 8pR2DR (14)
S ¼ p ðRþ DRÞ2 � ðR� DRÞ2� �
¼ 4pRDR (15)
If we relate S with Vwall,
S ¼Vwall
2R¼ p
Vwall
LPS(16)
Finally, it is possible to obtain the pressure of thebladder in terms of stress and volume.
Pves ¼ TdetVwallp
LPS
4pL2PS
(17)
On the other hand, the stress of the detrusor (Tdet) ismodelled as the adding of the stress of the parallel spring(TPS) and the stress of the serial spring (TSS)
Tdet ¼ TPS þ TSS (18)
The stress of the parallel spring (TPS) depends on thepassive properties of the detrusor according to thefollowing equation:
TPS ¼LPS � L0PS
LPSEPS exp
LPS � L0PS
LPSbPS
� 2 !
(19)
where L0PS is the initial length of the PS element, EPS theelasticity constant, bPS the rigidity factor
If we assume that the elongation of the parallel spring(LPS) is the length of the circumference of the bladder:
LPS ¼ 2p
ffiffiffiffiffiffiffiffiffiffiffiffi3V ves
4p3
r(20)
The volume of the bladder (Vves) depends on thequantity of the urine that goes into the bladder (Qi), theurine that goes out and into the proximal urethra ðBQPUÞ
and the volume of the mucosal layer in the bladder (Vmuc)according to the following equation:
V ves ¼ Vmuc þ
ZðQi �
BQPUÞdt (21)
When in the bladder there is not urine, the volume willbe equal to the volume of the mucosal layer. In thismoment: Vves ¼ V0ves, LPS ¼ L0PS.
The stress of the serial spring (TSS) is calculated using theequation:
TSS ¼LSS � L0SS
LSSESS exp
LSS � L0SS
LSSbSS
� 2 !
(22)
where L0SS is the initial length of the element SS, ESS theelasticity constant and bSS the rigidity factor
According to the model, the lengths of the two ways areequal:
LPS ¼ LSS þ LCE (23)
and the stresses of the elements in the serial way arebalanced:
TSS ¼ TCE (24)
The length of the contractile element depends on itscontraction velocity or elongation (vCE) and its initiallength (L0CE):
LCE ¼ L0CE þ
ZvCE dt (25)
The Hill’s equation allows describing the active andpassive properties of the viscoelastic behaviour of thedetrusor muscle and it can relate the velocity with themuscle stress [7]:
vCE ¼ �bTmax�CE � TCE
TCE þ a(26)
where Tmax-CE is the maximum stress that CE can generate,TCE the stress generated by CE, b the physiologicalconstant, a the constant (Tmax-CE/4)The maximum stress that can be generated by the
detrusor muscle (Tmax-CE) depends on its maximumisometric stress (Tmis-CE), its grade of stimulation becauseof the efferent signal (Ed) and the length of its fibres (LCE):
Tmax�CE ¼ Tmis�CELCEEd (27)
Due to that the neuronal control signals are normalisedbetween 0 and 1, it is necessary to adapt the levels of theefferent neuronal signal to the appropriate values tocalculate the maximum stress of the detrusor muscle usingthe equation:
Ed ¼ K1
1þ expð�ðC1TSED þ C2
SMEDÞ þ TÞ(28)
where K is the gain constant, T the time constant, C1 y C2the weights of the efferent neuronal signals, TSED y SMED
the efferent neuronal signals normalisedThe proximal urethra is modelled as a distensible
truncated cone tube rounded by a layer of smooth musclesand a mucosal layer. It has been incorporated thesympathetic efferent activity and we have modelled theinternal sphincter (IS—Internal Sphincter) as a smoothmuscle that facilitates the storage. This muscle is modelledas a stopcock between the bladder and the proximalurethra using an elastic structure similar to that used in thedetrusor. When it relaxes, the urine passes to the urethra.In the Fig. 9 it is shown the scheme of the proximalurethra.The internal sphincter is modelled using an elastic
structure similar to the one used in the detrusor, formedby a serial lineal spring (SS) and a contractile element (CE),and all this in parallel with other lineal spring (PS).We consider that the pressure of the proximal urethra
(Ppu) depends on the properties of the mucosal layer.

ARTICLE IN PRESS
Tpu
Tpu
Tpu
Tpu
Tpu
Tpu
Hpu
Ppu
R2pu
2ΔR2pu
R1pu
2ΔR1pu
Fig. 9. Scheme of the proximal urethra. Ppu: pressure of the proximal
urethra, Tpu: stress in the wall of the proximal urethra, R1pu: radius of the
small circumference of the proximal urethra, R2pu: radius of the big
circumference of the proximal urethra, Hpu: length of the proximal
urethra.
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754752
So, the pressure on the walls of the proximal urethra iscalculated as:
Ppu ¼k
L2pu
(29)
where k is the grade of compression for the mucosal layerof the proximal urethra, Lpu the length of the proximalurethra
Using the Laplace’s law and taking onto account thethickness of the wall (Swall), the stress in the walls of theproximal urethra (Tpu) is:
Tpu ¼PpuðLpuÞ
4pSwall(30)
Considering that the stress in the walls of the proximalurethra (Tpu) is the adding of the stress caused by theelongation of the parallel element (TPS) and the serial one(TSS), the stress of the serial spring is obtained as:
TSS ¼ Tpu � TPS ¼ TCE (31)
From TSS it is possible to calculate the length of theserial element (LSS):
LSS ¼TSSL0SS
ESSþ L0SS (32)
L0SS is the initial length of the element SS, ESS the constantfor the elastic behaviour
The resulting length of the elastic structure that modelsthe internal sphincter will be:
Lpu ¼ LPS ¼ LSS þ LCE (33)
The length of the contractile element (LCE) and itsvelocity (vCE) are obtained using the Hill’s equation. Thestress caused by the elongation of the parallel element (TPS)
is modelled as:
TPS ¼LPS � L0PS
L0PSEPS (34)
L0PS is the initial length of the element PS, EPS the constantof elastic behaviourThe maximum stress that the internal sphincter can
present, Tmax-CE, depends on its maximum isometric stress(Tmis-CE), the grade of stimulation through the efferentsignal (Eis) and the length of its fibres (LCE):
Tmax�CE ¼ Tmis�CELCEEis (35)
To adapt the levels of the efferent neuronal signalnormalised to the values adequate to calculate themaximum stress of the muscle, it is used the followingrelation:
Eis ¼ K1
1þ expð�ðC1TSEIS þ C2
SMEISÞ þ TÞ(36)
where K is the gain constant, T the time constant, C1 y C2the weights of the efferent neuronal signals, TSEIS y SMEIS
the efferent neuronal signals normalisedOn the other hand, the flow through the internal
sphincter (Bunsen’s Law applying the Theorem ofBernoulli) is:
BQPU ¼ Apu
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2ðPves � PpuÞ
r
s(37)
where BQPU is the flow through the proximal urethra, Apu
the area of the cross-section of the proximal urethra, r thedensity of the urine, Pves the pressure of the bladder, Ppu
the pressure of the proximal urethraFinally, the volume of urine stored in the proximal
urethra will be:
Vpu ¼h
12pðL2
pu þ LpuLure þ L2ureÞ (38)
where h is the high of the proximal urethra, Lpu the lengthof the circumference of the bigger base of the proximalurethra, Lure the length of the circumference of the smallerbase of the proximal urethraThe distal urethra is modelled as a cylinder rounded by
several types of muscles organised in concentric layersaround the distal urethra (urethral smooth muscle, intrinsicurethral striated muscle, extrinsic urethral striated muscleand pelvic floor muscle). The set of these muscles is calledexternal sphincter (ES—External Sphincter). We model theES as a stopcock using an elastic structure similar to theone used in the internal sphincter. When the externalsphincter relaxes, the urine passes towards the distalurethra. In the Fig. 10 it is shown the scheme.All the calculation and modelling process developed for
the proximal urethra is valid for the distal urethra. Equallythat with the other elements, if we apply the Laplace’s law,we obtain the stress in the walls of the distal urethra:
Tdu ¼PduLdu
2pSwall(39)

ARTICLE IN PRESS
Tdu
Tdu
Tdu
Tdu
Tdu
Tdu
RduHdu
Pdu
2ΔRdu
Fig. 10. Scheme of the distal urethra. Pdu: pressure of the distal urethra,
Tdu: stress in the wall of the distal urethra, Rdu: radius of the circumference
of the distal urethra, Hdu: length of the distal urethra.
F. Macia Perez et al. / Neurocomputing 71 (2008) 743–754 753
To adapt the levels of the efferent neuronal signalsnormalised to the values adequated to calculate the maximumisometric stress in the muscle, we use the following equation:
Ees
¼K
1þ expð�ðC1TSESU þ C2
SMEIUS þ C3SSEEUS þ C4
SSEPFÞ þ TÞ
ð40Þ
where K is the gain constant, T the time constant, C1, C2,C3 y C4 the weights of the efferent neuronal signals, TSESU,SMEIUS,
SSEEUS y SSEPF the normalised efferent neuronalsignals.
Using the theorem of Bernoulli, the flow through theproximal urethra will be:
BQPU ¼ APU �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2� ðPB � PPUÞ
r
s(41)
where PB y PPU have been defined previously, APU is thearea of the cross-section of the proximal urethra and r isthe density of the urine.
The flow that goes into the distal urethra PUQDU, that isto say, the flow that goes outside Q0, is obtained as:
PUQDU ¼ ADU �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2� ðPPU � PDUÞ
r
s(42)
where r and PPU have been defined previously, ADU is thearea of the cross-section of the distal urethra and PDU isthe pressure of distal urethra.
The MSLUT produce the afferent neuronal signals, thatis, the inputs to the neuronal regulator, from hydrody-namic of the urine, the passive properties of the musclesand the active properties of the muscles that depend on theefferent neuronal signals.
References
[1] B.F.M. Blok, G. Holstege, The central control of micturition and
continence: implications for urology, Brit. J. Urol. 83 (1999) 1–6.
[2] F. van Duin, P.F. Rosier, B.L. Bemelmans, H. Wijkstra, F.M.
Debruyne, A. van Oosterom, Comparison of different computer
models of the neural control system of the lower urinary tract,
Neurourol. Urodyn. 19 (2000) 289–310.
[3] F. van Duin, P.F.W.M. Rosier, N.J.M. Rijkhoff, P.E.V. van
Kerrebroeck, F.M.J. Debruyne, H. y Wijkstra, A computer model
of the neural control of the lower urinary tract, Neurology and
Urodynamics 17 (1998) 175–196.
[4] W.A. van Duyl, A model for both passive and active properties of the
urinary bladder tissue related to the bladder function, Neurourol
Urodynamics 4 (1985) 275–283.
[5] J. Ferber, Multi-Agent Systems. An Introduction to Distri-
buted Artificial Intelligence, Addison-Wesley, Reading, MA,
1999.
[6] J.M. Garcıa, A. Soriano, F. Macia, D. Ruiz, Simulation of the
neuronal regulator of the lower urinary tract using a multiagent
system, in: G. Goos, J. Hartmanis, J. van Leeuwen (Eds.), Artificial
Neural Nets Problem Solving Methods. Lecture Notes in Computer
Science 2687, Springer, Berlin Heidelberg New York, 2003
pp. 591–598.
[7] A.V. Hill, First and Last Experiments in Muscle Mechanics,
University Press, Cambridge, 1970.
[8] K. Hornik, M. Stinchcombe, H. White, Multilayer feedforward
networks are universal approximators, Neural Networks 1 (1989)
359–366.
[9] M.V. Kinder, E.H.C. Bastiaanssen, R.A. Janknegt, E. Marani,
Neuronal circuitry of the lower urinary tract, central and peripheral
neuronal control of the micturition cycle, Anat. Embryol. 192 (1995)
195–209.
[10] M.V. Kinder, E.H.C. Bastiaanssen, R.A. Janknegt, E. Marani, The
neuronal control of the lower urinary tract: a model of architecture
and control mechanisms, Arch. Physiol. Biochem. 107 (1999)
203–222.
[11] A. Kondo, J. Susset, J. Lefaivre, Viscoelastic properties of bladder I.
Mechanical model and its mathematical analysis, Investigative
Urology 10 (1972) 154–162.
[12] L. Leoncini, G. Manzini, L. Margara, Parallel complexity of
householder QR factorization, in: J. Dıaz, M.J. Serna (Eds.),
Algorithms-ESA ‘96, Lecture Notes in Computer Science,
vol. 1136, Springer, Berlin, 1996, pp. 290–301.
[13] F. Macia, Modelling of administration of heterogeneous of computer
networks. System of regeneration of nodes of networks. PhD
dissertation Dept. Comp. Tech. University of Alicante, Alicante,
Spain. 2001.
[14] K.S. Narendra, Neural networks for control: theory and practice,
Proceedings of IEEE 10 (1996) 1385–1402.
[15] M. Norgaard, Neural Networks for Modelling and Control of
Dynamic Systems, Springer, Berlin, 2000.
[16] D. Ruiz, J.M. Garcıa, F. Macia, A. Soriano, Modelling the
distributed control of the Lower Urinary tract using a multiagent
system. Lecture notes in artificial intelligence, vol. 3131, Springer,
Berlin Heidelberg, New York, 2004, pp. 104–114.
[17] J. Salinas, Obstruccion funcional del tracto urinario inferior, In: J.
Salinas, J. Romero, (eds.), Urodinamica Clınica 2%a ed., (1995)
229–246.
[18] A. Soriano, J.M. Garcıa, F. Ibarra, F. Macia, Urodynamic model
of the lower urinary tract. Proceedings of Computational Intelli-
gence for Modelling, Control & Automation CIMCA’99, 1999,
pp. 123–128.
[19] J.R. Sotolongo, Causes and treatment of neurogenic bladder
dysfunction, in: R.J. Krane, et al. (Eds.), Clinical Urology, J.B.
Lippincott Company, 1994, pp. 558–568.
[20] A. Tewari, Artificial intelligence and neural networks: con-
cept, applications and future in urology, Brit. J. Urol. 80 (1997)
53–58.
[21] N.R. Zinner, R.C. Ritter, A.M. Sterling, P.J. Donker, The physical
basis of some urodynamic mesasurements, Journal of Urology 117
(1977) 682–689.

ARTICLE IN PRESSocomputing 71 (2008) 743–754
Francisco Macia received his Bachelors degree
in Computer Science from the University of
Alicante (Spain) in 1994 and his Ph degree in
Computer Science from the same university in
2001. He has worked as Computer Administrator
in the University of Alicante for 4 years and now
he is an Assistant Professor and Director of the
Department of Computer Technology and In-
formation of the University of Alicante. He has
coordinated several national projects related to
F. Macia Perez et al. / Neur754
the computer networks. His research interests are focused in distributed
computing, computer networks and biocybernetics.
Juan Manuel Garcıa received his Bachelors
degree in Physics from the University of Granada
(Spain) in 1980 and his Ph degree in Computer
Science from the University of Alicante in 1994.
He is Professor of Computer Architectures and
Director of the Industrial Computing and Com-
puter Networks Research Group of the Univer-
sity of Alicante. He is a reviewer of several
international publications and he has coordi-
nated national projects related to computing. His
research interests are focused in computer vision, computer architectures,
networks and biocybernetics.
Antonio Soriano received his Bachelors degree in
Computer Science from the University Polytech-
nic of Valencia (Spain) in 1993 and his Ph degree
in Computer Science from the University of
Alicante (Spain) in 2001. He is an Assistant
Professor in the Department of Computer
Technology and Information of the University
of Alicante. He coordinates the division of
medical bioengineering of the Department. His
research interests are focused in biocybernetics,
computer architectures and computer networks.
Daniel Ruiz received his Bachelors degree
in Computer Science from the University of
Alicante (Spain) in 1998 and his Ph degree in
Computer Science from the same university in
2003. Between 1999 and 2004 he worked as a
lecturer at the University of Alicante. Since 2004,
he is an Associate Professor in the Department of
Computer Technology and Information of the
University of Alicante. He is a member of IEEE
and Computer Society. His research interests are
focused in biocybernetics, computer architectures, distributed computing
and computer networks.



![7 Catheter-associated Urinary Tract Infection (CAUTI) · UTI Urinary Tract Infection (Catheter-Associated Urinary Tract Infection [CAUTI] and Non-Catheter-Associated Urinary Tract](https://img.pdfslide.net/doc/110x75/5c40b88393f3c338af353b7f/7-catheter-associated-urinary-tract-infection-cauti-uti-urinary-tract-infection.jpg)