Embed Size (px)
Citation preview

A space-time Trefftz method for the second order waveequation
Lehel Banjai
The Maxwell Institute for Mathematical SciencesHeriot-Watt University, Edinburgh
Rome, 10th Apr 2017
Joint work with: Emmanuil Georgoulis (Leicester & Athens), Oluwaseun F Lijoka
(HW)
1 / 36

Outline of the talk
1 Motivation
2 An interior-penalty space-time dG method
3 Damped wave equation
4 Numerical results
2 / 36

Outline
1 Motivation
2 An interior-penalty space-time dG method
3 Damped wave equation
4 Numerical results
3 / 36

Acoustic wave equationFind u(t) ∈ H1
0(Ω), t ∈ [0,T ], s.t.
(u, v)L2(Ω) + (a∇u,∇v)L2(Ω) = 0 for all v ∈ H10(Ω),
u(x ,0) = u0(x), u(x ,0) = v0(x), in Ω.
Initial data u0 ∈ H10(Ω), v0 ∈ L2(Ω).
a(x) piecewise constant 0 < ca < a(x) < Ca.
Unique solution exists with
u ∈ L2([0,T ]; H1
0(Ω)), u ∈ L2([0,T ]; L2
(Ω)), u ∈ L2([0,T ]; H−1
(Ω))
u ∈ C([0,T ]; H10(Ω)), u ∈ C([0,T ]; L2
(Ω)).
For smooth enough solution we have the transmission conditions
uj = uk , aj∂nuj = ak∂nuk , on ∂Ωj ∩ ∂Ωk ,uj = u∣Ωj,uk = u∣Ωk
,
where Ωj and Ωk are subsets of Ω with a ≡ ak in Ωk and a ≡ aj in Ωj .
4 / 36

Acoustic wave equationFind u(t) ∈ H1
0(Ω), t ∈ [0,T ], s.t.
(u, v)L2(Ω) + (a∇u,∇v)L2(Ω) = 0 for all v ∈ H10(Ω),
u(x ,0) = u0(x), u(x ,0) = v0(x), in Ω.
Initial data u0 ∈ H10(Ω), v0 ∈ L2(Ω).
a(x) piecewise constant 0 < ca < a(x) < Ca.
Unique solution exists with
u ∈ L2([0,T ]; H1
0(Ω)), u ∈ L2([0,T ]; L2
(Ω)), u ∈ L2([0,T ]; H−1
(Ω))
u ∈ C([0,T ]; H10(Ω)), u ∈ C([0,T ]; L2
(Ω)).
For smooth enough solution we have the transmission conditions
uj = uk , aj∂nuj = ak∂nuk , on ∂Ωj ∩ ∂Ωk ,uj = u∣Ωj,uk = u∣Ωk
,
where Ωj and Ωk are subsets of Ω with a ≡ ak in Ωk and a ≡ aj in Ωj .
4 / 36

How to discretize the wave equation?
The usual approach:
Construct a spatial mesh and a corresponding spatially discrete space:locally polynomial, continuous or discontinuous across the boundariesof the spatial elements (the spatial skeleton).
Finite difference approximation in time.
Solution computed by time-stepping.
In this talk (Trefftz):
Construct a space-time mesh and corresponding fully discrete space: In each space time element exact (polynomial or non-polynomial) exact
solution of the wave equation. Discontinous across the space-time skeleton.
Solve either by time-stepping or as a large system.
5 / 36

How to discretize the wave equation?
The usual approach:
Construct a spatial mesh and a corresponding spatially discrete space:locally polynomial, continuous or discontinuous across the boundariesof the spatial elements (the spatial skeleton).
Finite difference approximation in time.
Solution computed by time-stepping.
In this talk (Trefftz):
Construct a space-time mesh and corresponding fully discrete space: In each space time element exact (polynomial or non-polynomial) exact
solution of the wave equation. Discontinous across the space-time skeleton.
Solve either by time-stepping or as a large system.
5 / 36

Frequency domain motivation
Frequency domain
Take cue from frequency domain
u(x) ≈k
∑j=1
fjeiωx⋅aj ,
where aj are directions, ∣aj ∣ = 1.
Motivation −∆u − ω2u = 0:
For large ω, minimize the number of degrees of freedom per wavelength.
Time-domain
Time-domain equivalent
u(x, t) ≈k
∑j=1
fj(t − x ⋅ aj)
≈k
∑j=1
p
∑`=0
αj ,`(t − x ⋅ aj)`.
6 / 36

Frequency domain motivation
Frequency domain
Take cue from frequency domain
u(x, ω) ≈k
∑j=1
fj(ω)e iωx⋅aj ,
where aj are directions, ∣aj ∣ = 1.
Time-domain
Time-domain equivalent
u(x, t) ≈k
∑j=1
fj(t − x ⋅ aj)
≈k
∑j=1
p
∑`=0
αj ,`(t − x ⋅ aj)`.
6 / 36

Frequency domain motivation
Frequency domain
Take cue from frequency domain
u(x, ω) ≈k
∑j=1
fj(ω)e iωx⋅aj ,
where aj are directions, ∣aj ∣ = 1.
Time-domain
Time-domain equivalent
u(x, t) ≈k
∑j=1
fj(t − x ⋅ aj)
≈k
∑j=1
p
∑`=0
αj ,`(t − x ⋅ aj)`.
6 / 36

Frequency domain motivation
Frequency domain
Take cue from frequency domain
u(x, ω) ≈k
∑j=1
fj(ω)e iωx⋅aj ,
where aj are directions, ∣aj ∣ = 1.
Time-domain
Time-domain equivalent
u(x, t) ≈k
∑j=1
fj(t − x ⋅ aj)
≈k
∑j=1
p
∑`=0
αj ,`(t − x ⋅ aj)`.
6 / 36

(A bit of) Literature on Trefftz methods for wavesPlenty of literature in the frequency domain
O. Cessenat and B. Despres, Application of an ultra weak variationalformulation of elliptic PDEs to the two-dimensional Helmholtz equation,SIAM J. Numer. Anal., (1998)
R. Hiptmair, A. Moiola, I. Perugia, A survey of Trefftz methods for theHelmholtz equation. Springer Lect. Notes Comput. Sci. Eng., 2016, pp.237-278.
Fewer in time-domain
S. Petersen, C. Farhat, and R. Tezaur, A space-time discontinuous Galerkinmethod for the solution of the wave equation in the time domain, Internat.J. Numer. Methods Engrg. (2009)
F. Kretzschmar, A. Moiola, I. Perugia, S. M. Schnepp, A priori error analysisof space-time Trefftz discontinuous Galerkin methods for wave problems,IMA J. Numer. Anal., 36(4) 2016, pp. 1599-1635.
L. Banjai, E. Georgoulis, O Lijoka, A Trefftz polynomial space-timediscontinuous Galerkin method for the second order wave equation, SIAM J.Numer. Anal. 55-1 (2017), pp. 63–86.
7 / 36

(A bit of) Literature on Trefftz methods for wavesPlenty of literature in the frequency domain
O. Cessenat and B. Despres, Application of an ultra weak variationalformulation of elliptic PDEs to the two-dimensional Helmholtz equation,SIAM J. Numer. Anal., (1998)
R. Hiptmair, A. Moiola, I. Perugia, A survey of Trefftz methods for theHelmholtz equation. Springer Lect. Notes Comput. Sci. Eng., 2016, pp.237-278.
Fewer in time-domain
S. Petersen, C. Farhat, and R. Tezaur, A space-time discontinuous Galerkinmethod for the solution of the wave equation in the time domain, Internat.J. Numer. Methods Engrg. (2009)
F. Kretzschmar, A. Moiola, I. Perugia, S. M. Schnepp, A priori error analysisof space-time Trefftz discontinuous Galerkin methods for wave problems,IMA J. Numer. Anal., 36(4) 2016, pp. 1599-1635.
L. Banjai, E. Georgoulis, O Lijoka, A Trefftz polynomial space-timediscontinuous Galerkin method for the second order wave equation, SIAM J.Numer. Anal. 55-1 (2017), pp. 63–86.
7 / 36

Outline
1 Motivation
2 An interior-penalty space-time dG method
3 Damped wave equation
4 Numerical results
8 / 36

DG setting
Time discretization 0 = t0 < t1 < ⋅ ⋅ ⋅ < tN = T , In = [tn, tn+1];τn = tn+1 − tn.
Spatial-mesh T n of Ω consisting of open simplices such thatΩ = ∪K∈TnK . In each simplex K , a(x) is constant.
Space-time slabs Tn × In, h-space-time meshwidth.
The skeleton of the space mesh denoted Γn and Γn ∶= Γn−1 ∪ Γn.
Usual jump and average definitions (e = K+ ∩K− ∈ Γint)
u ∣e =1
2(u+ + u−), v ∣e =
1
2(v+ + v−),
[u] ∣e = u+n+ + u−n−, [v] ∣e = v+ ⋅ n+ + v− ⋅ n−,
and if e ∈ K+ ∩ ∂Ω,
v ∣e = v+, [u] ∣e = u+n+
Also⟦u(tn)⟧ = u(t+n ) − u(t−n ), ⟦u(t0)⟧ = u(t+0 ).
9 / 36

Local Trefftz spacesThe space of piecewise polynomials on the time-space mesh denoted
Sh,pn ∶= u ∈ L2
(Ω × In) ∶ u∣K×In ∈ Pp(Rd+1
), K ∈ Tn ,
Let Sh,pn,Trefftz ⊂ Sh,p
n with
v(t, x) − a∆v(t, x) = 0, t ∈ In, x ∈ K , for any v ∈ Sh,pn,Trefftz.
The dimensions of the spaces Sh,pn and Sh,p
n,Trefftz for spatial dimension d are
1D 2D 3D
poly 12(p + 1)(p + 2) 1
6(p + 1)(p + 2)(p + 3) 2D × 14(p + 4)
Trefftz 2p + 1 (p + 1)2 16(p + 1)(p + 2)(2p + 3)
We expect the approximation properties of solutions of the waveequation to be the same for the two spaces of different dimension.
10 / 36

Constructing the polynomial spaces
Choose directions ξj :
(t −1
√a
x ⋅ ξj)`
, ` = 0,1, . . . ,p.
Alternatively propagate polynomial initial condition:
u(0) = xαk , u(0) = 0,
andu(0) = 0, u(0) = xβk ,
with ∣αk ∣ ≤ p and ∣βk ∣ ≤ p − 1, αk , βk multi-indices.
Important observation: trunctation of the Taylor expansion of exactsolution is a polynomial solution of the wave equation.
11 / 36

Constructing the polynomial spaces
Choose directions ξj :
(t −1
√a
x ⋅ ξj)`
, ` = 0,1, . . . ,p.
Alternatively propagate polynomial initial condition:
u(0) = xαk , u(0) = 0,
andu(0) = 0, u(0) = xβk ,
with ∣αk ∣ ≤ p and ∣βk ∣ ≤ p − 1, αk , βk multi-indices.
Important observation: trunctation of the Taylor expansion of exactsolution is a polynomial solution of the wave equation.
11 / 36

Constructing the polynomial spaces
Choose directions ξj :
(t −1
√a
x ⋅ ξj)`
, ` = 0,1, . . . ,p.
Alternatively propagate polynomial initial condition:
u(0) = xαk , u(0) = 0,
andu(0) = 0, u(0) = xβk ,
with ∣αk ∣ ≤ p and ∣βk ∣ ≤ p − 1, αk , βk multi-indices.
Important observation: trunctation of the Taylor expansion of exactsolution is a polynomial solution of the wave equation.
11 / 36

The space on Ω × [0,T ] is then defined as
V h,pTrefftz = u ∈ L2
(Ω × [0,T ]) ∶ u∣Ω×In ∈ Sh,pn,Trefftz, n = 0,1 . . . ,N.
(Abuse of) Notation:
uh ∈ V h,pTrefftz-discrete function on Ω × [0,T ]
un ∈ Sh,pn,Trefftz, restriction of u on Ω × In.
uex– the exact solution.
12 / 36

The space on Ω × [0,T ] is then defined as
V h,pTrefftz = u ∈ L2
(Ω × [0,T ]) ∶ u∣Ω×In ∈ Sh,pn,Trefftz, n = 0,1 . . . ,N.
(Abuse of) Notation:
uh ∈ V h,pTrefftz-discrete function on Ω × [0,T ]
un ∈ Sh,pn,Trefftz, restriction of u on Ω × In.
uex– the exact solution.
12 / 36

An interior penalty dG method
We start with
∫
tn+1
tn[∫
Ωuv + a∇u ⋅ ∇vdx − ∫
Γa∇u ⋅ [v]ds − ∫
Γ[u] ⋅ a∇vds
+ σ0∫Γ[u] ⋅ [v]ds ]dt = 0.
Testing with v = u gives
∫
tn+1
tn
d
dtE(t,u)dt = 0,
where the energy is given by
E(t,u) = 12∥u(t)∥2
Ω +12∥
√a∇u(t)∥2
Ω +12∥
√σ0 [u(t)] ∥2
Γ −∫Γa∇u ⋅ [u]ds.
Discrete inverse inequality in space and usual choice of penalty parametergives E(t,u) ≥ 0.
13 / 36

Jumps in time
Summing over n gives
E(t−N) − E(t+0 ) −N−1
∑n=1
⟦E(tn)⟧ = 0.
To give a sign to the extra terms (Hughes, Hulbert ’88):
1
2⟦(u(tn), u(tn))L2(Ω)⟧ − (⟦u(tn)⟧, u(t+n ))L2(Ω) =
1
2(⟦u(tn)⟧, ⟦u(tn)⟧)L2(Ω).
Do this for all the terms, including the stabilization.
Obtain a dissipative method.
14 / 36

Space-time dG formulation
a(u, v) ∶=N−1
∑n=0
(u, v)Ω×In + (⟦u(tn)⟧, v(t+n ))Ω
+ (a∇u,∇v)Ω×In + (⟦a∇u(tn)⟧,∇v(t+n ))Ω
− (a∇u , [v])Γn×In − (⟦a∇u(tn)⟧, [v(t+n )])Γn
− ([u] ,a∇v)Γn×In − (⟦[u(tn)]⟧,a∇v(t+n ))Γn
+ (σ0 [u] , [v])Γn×In + (σ0⟦[u(tn)]⟧, [v(t+n )])Γn
+ (σ1 [u] , [v])Γn×In + (σ2 [a∇u] , [a∇v])Γn×Inand
binit(v) ∶= (v0, v(t+0 ))Ω + (a∇u0,∇v(t+0 ))Ω − (a∇u0 , [v(t+0 )])Γ0
− ([u0] ,a∇v(t+0 ))Γ0+ (σ0 [u0] , [v(t+0 )])Γ0
.
Find uh ∈ V h,pTrefftz(Ω × [0,T ]) such that
a(uh, v) = binit(v), ∀v ∈ V h,p
Trefftz(Ω × [0,T ]).15 / 36

Time-space dG as a time-stepping method
an(u, v) ∶= (u, v)Ω×In + (u(t+n ), v(t+n ))Ω
+ (a∇u,∇v)Ω×In + (a∇u(t+n ),∇v(t+n ))Ω
− (a∇u , [v])Γn×In − (a∇u(t+n ) , [v(t+n )])Γn
− ([u] ,a∇v)Γn×In − ([u(t+n )] ,a∇v(t+n ))Γn
+ (σ0 [u] , [v])Γn×In + (σ0 [u(t+n )] , [v(t+n )])Γn
+ (σ1 [u] , [v])Γn×In + (σ2 [a∇u] , [a∇v])Γn×In ,
bn(u, v) ∶= (u(t−n ), v(t+n ))Ω + (a∇u(t−n ),∇v(t+n ))Ω − (a∇u(t−n ) , [v(t+n )])Γn
− ([u(t−n )] ,a∇v(t+n ))Γn−1+ (σ0 [u(t−n )] , [v(t+n )])Γn
,
Find un ∈ Sh,pn,Trefftz such that
an(un, v) = bn(un−1, v), ∀v ∈ Sh,pn,Trefftz.
16 / 36

Consistency and stability
Theorem
The following statements hold:
1 The method is consistent for a sufficiently smooth solution u.
2 There exists a choice of σ0 ∼ h−1, such that for any v ∈ Sh,pn,Trefftz and
t ∈ In the energy is bounded below as
E(t, v) ≥1
2∥v(t)∥2
L2(Ω) +1
4∥√
a∇v(t)∥2L2(Ω).
3 Let uh ∈ V h,pTrefftz discrete solution. Then
E(t−N ,uh) ≤ E(t−1 ,u
h).
17 / 36

a(⋅, ⋅)1/2∶= ∣∣∣⋅∣∣∣ - a norm on V h,p
Trefftz
a(w ,w) = Eh(t−N ,w) + Eh(t+0 ,w) +N−1
∑n=1
(12∥⟦w(tn)⟧∥
2Ω + 1
2∥√
a⟦∇w(tn)⟧∥2Ω
− (⟦a∇w(tn)⟧, ⟦[w(tn)]⟧)Γn+ 1
2∥⟦√σ0 [w(tn)]⟧∥
2Γn)
+N−1
∑n=0
(∥√σ1 [w]∥
2Γn×In + ∥
√σ2 [a∇w]∥
2Γn×In).
Theorem
a(v , v)1/2 = ∣∣∣v ∣∣∣ = 0 Ô⇒ v = 0, for v ∈ V h,pTrefftz.
Hence, the time-space dG method
a(u, v) = binit(v), ∀v ∈ V h,p
Trefftz
has a unique solution in V h,pTrefftz.
The proof is by noticing that if ∣∣∣v ∣∣∣ = 0 then v is a smooth solution ofthe wave equation, uniquely determined by the initial condition.
18 / 36

a(⋅, ⋅)1/2∶= ∣∣∣⋅∣∣∣ - a norm on V h,p
Trefftz
a(w ,w) = Eh(t−N ,w) + Eh(t+0 ,w) +N−1
∑n=1
(12∥⟦w(tn)⟧∥
2Ω + 1
2∥√
a⟦∇w(tn)⟧∥2Ω
− (⟦a∇w(tn)⟧, ⟦[w(tn)]⟧)Γn+ 1
2∥⟦√σ0 [w(tn)]⟧∥
2Γn)
+N−1
∑n=0
(∥√σ1 [w]∥
2Γn×In + ∥
√σ2 [a∇w]∥
2Γn×In).
Theorem
a(v , v)1/2 = ∣∣∣v ∣∣∣ = 0 Ô⇒ v = 0, for v ∈ V h,pTrefftz.
Hence, the time-space dG method
a(u, v) = binit(v), ∀v ∈ V h,p
Trefftz
has a unique solution in V h,pTrefftz.
The proof is by noticing that if ∣∣∣v ∣∣∣ = 0 then v is a smooth solution ofthe wave equation, uniquely determined by the initial condition.
18 / 36

Convergence analysis
If we prove continuity of a(⋅, ⋅)
∣a(u, v)∣ ≤ C⋆∣∣∣u∣∣∣⋆∣∣∣v ∣∣∣, ∀u ∈ cont. sol. +V h,pTrefftz, v ∈ V h,p
Trefftz,
we can use Galerkin orthogonality to show, for any v ∈ V h,pTrefftz
∣∣∣uh− v ∣∣∣2 = a(uh
− v ,uh− v)
= a(uex − v ,uh− v)
≤ C⋆ ∣∣∣uex − v ∣∣∣⋆∣∣∣uh− v ∣∣∣
and hence we have quasi-optimality
∣∣∣uh− uex ∣∣∣ ≤ inf
v∈V h,pTrefftz
∣∣∣uh− v ∣∣∣ + ∣∣∣v − uex ∣∣∣
≤ infv∈V h,p
Trefftz
∣∣∣v − uex ∣∣∣ + C⋆∣∣∣v − uex ∣∣∣⋆
19 / 36

Convergence analysis
If we prove continuity of a(⋅, ⋅)
∣a(u, v)∣ ≤ C⋆∣∣∣u∣∣∣⋆∣∣∣v ∣∣∣, ∀u ∈ cont. sol. +V h,pTrefftz, v ∈ V h,p
Trefftz,
we can use Galerkin orthogonality to show, for any v ∈ V h,pTrefftz
∣∣∣uh− v ∣∣∣2 = a(uh
− v ,uh− v)
= a(uex − v ,uh− v)
≤ C⋆ ∣∣∣uex − v ∣∣∣⋆∣∣∣uh− v ∣∣∣
and hence we have quasi-optimality
∣∣∣uh− uex ∣∣∣ ≤ inf
v∈V h,pTrefftz
∣∣∣uh− v ∣∣∣ + ∣∣∣v − uex ∣∣∣
≤ infv∈V h,p
Trefftz
∣∣∣v − uex ∣∣∣ + C⋆∣∣∣v − uex ∣∣∣⋆
19 / 36

Integrating by parts a few times (this is how to implement the method)
a(w , v) =N−1
∑n=0
( (a∇w , [v])Γn×In − (σ0 [w] , [v])Γn×In − (w , [a∇v])Γintn ×In
+ (σ1 [w] , [v])Γn×In + (σ2 [a∇w] , [a∇v])Γn×In )
−N
∑n=1
( (w(t−n ), ⟦v(tn)⟧)Ω + (a∇w(t−n ), ⟦∇v(tn)⟧)Ω
− (a∇w(t−n ) , ⟦[v(tn)]⟧)Γn− ([w(t−n )] , ⟦a∇v(tn)⟧)Γn
+ (σ0 [w(t−n )] , ⟦[v(tn)]⟧)Γn).
Recall
∣∣∣v ∣∣∣2 = E(t−N , v) + E(t+0 , v) +N−1
∑n=1
(12∥⟦v(tn)⟧∥
2Ω + 1
2∥⟦∇v(tn)⟧∥2Ω
+ (⟦∇v(tn)⟧, ⟦[v(tn)]⟧)Γn+ 1
2∥⟦√σ0 [v(tn)]⟧∥
2Γn)
+N−1
∑n=0
(∥√σ1 [v]∥2
Γ×In + ∥√σ2 [∇v]∥2
Γ×In),
20 / 36

Integrating by parts a few times (this is how to implement the method)
a(w , v) =N−1
∑n=0
( (a∇w , [v])Γn×In − (σ0 [w] , [v])Γn×In − (w , [a∇v])Γintn ×In
+ (σ1 [w] , [v])Γn×In + (σ2 [a∇w] , [a∇v])Γn×In )
−N
∑n=1
( (w(t−n ), ⟦v(tn)⟧)Ω + (a∇w(t−n ), ⟦∇v(tn)⟧)Ω
− (a∇w(t−n ) , ⟦[v(tn)]⟧)Γn− ([w(t−n )] , ⟦a∇v(tn)⟧)Γn
+ (σ0 [w(t−n )] , ⟦[v(tn)]⟧)Γn).
Hence define,
∣∣∣w ∣∣∣2⋆ =
12
N
∑n=1
(∥w(t−n )∥2Ω + ∥
√a∇w(t−n )∥
2Ω + ∥
√σ0 [w(t−n )] ∥
2Γn+ ∥σ
−1/20 a∇w(t−n ) ∥
2Γn)
+N−1
∑n=0
(∥√σ1 [w]∥
2Γn×In + ∥
√σ2 [a∇w]∥
2Γn×In + ∥σ
−1/22 w∥
2Γintn ×In
+ ∥σ−1/21 a∇w∥
2Γn×In + ∥σ0σ
−1/21 [w]∥
2Γn×In) .
20 / 36

The choice of stabilization parameters and convergence
Let τn = tn+1 − tn, h = diam(K), (x , t) ∈ K × (tn, tn+1),K ∈ Tn.
diam(K)/ρK ≤ cT , ∀K ∈ Tn, n = 0,1, . . . ,N − 1, where ρK is theradius of the inscribed circle of K .
Assume space-time elements star-shaped with respect to a ball.
Choice of parameters σ0 = p2cT C 2
a Cinv(cah)−1, σ1 = Cap3(hτn)
−1
σ2 = h(Caτn)−1.
Theorem
For sufficiently smooth solution and h ∼ τ
∣∣∣uh− uex∣∣∣ = O(hp−1/2
).
Proof uses truncated Taylor expansion.
21 / 36

Error estimate in mesh independent normUsing a Gronwall argument we can show for v ∈ Sh,p
n,Trefftz
∥v∥2Ω×In + ∥
√a∇v∥2
Ω×In ≤ τneC(tn+1−tn)/hn (∥v(t−n+1)∥2Ω + ∥
√a∇v(t−n+1)∥
2Ω) ,
hn ∶= minx∈Ω h(x , t), t ∈ In. Let τ = max τn and h = min hn. Then
∥V ∥2Ω×(0,T) + ∥
√a∇V ∥
2Ω×(0,T) ≤ CτeCτ/h∣∣∣V ∣∣∣
2⋆, ∀V ∈ V h,p
Trefftz.
Proposition
∥uh− uex∥
2Ω×[0,T ] + ∥∇uh
−∇uex∥2Ω×[0,T ]
≤ C infV ∈V h,p
Trefftz
(τeCτ/h∣∣∣V − uex∣∣∣2⋆
+ ∥V − uex∥2Ω×[0,T ] + ∥
√a∇(V − uex)∥
2Ω×[0,T ]).
Hence in mesh independent energy norm we expect error O(hp).22 / 36

Outline
1 Motivation
2 An interior-penalty space-time dG method
3 Damped wave equation
4 Numerical results
23 / 36

Wave equation with damping
Damped wave equation:u + αu −∆u = 0.
The extra term decreases the energy:
d
dtE(t) = −α∥u∥2,
hence only a minor modification to the DG formulation needed.
However: truncations of the Taylor expansion are no longer solutions!
Grysa, Maciag, Adamczyk-Krasa ’14 consider solutions of the form
e−αtp1(x , t) + p2(x , t)
with p1 and p2 polynomial in x and t.
24 / 36

Wave equation with damping
Damped wave equation:u + αu −∆u = 0.
The extra term decreases the energy:
d
dtE(t) = −α∥u∥2,
hence only a minor modification to the DG formulation needed.
However: truncations of the Taylor expansion are no longer solutions!
Grysa, Maciag, Adamczyk-Krasa ’14 consider solutions of the form
e−αtp1(x , t) + p2(x , t)
with p1 and p2 polynomial in x and t.
24 / 36

Wave equation with damping
Damped wave equation:u + αu −∆u = 0.
The extra term decreases the energy:
d
dtE(t) = −α∥u∥2,
hence only a minor modification to the DG formulation needed.
However: truncations of the Taylor expansion are no longer solutions!
Grysa, Maciag, Adamczyk-Krasa ’14 consider solutions of the form
e−αtp1(x , t) + p2(x , t)
with p1 and p2 polynomial in x and t.
24 / 36

Solution formula in 1D
Instead, use basis functions obtained by propagating polynomial initialdata:
u(x ,0) = u0(x) = xαj , u(x ,0) = v0(x) = 0,
andu0(x) = 0, v0(x) = xβj
with∣αj ∣ ≤ p ∣βj ∣ ≤ p − 1.
In 1D solution is then given by the d’Alambert-like formula
u(x , t) =1
2[u0(x − t) + u0(x + t)] e−αt/2
+α
4e−αt/2
∫
x+t
x−tu0(s)I0 (ρ(s)α2 ) +
t
ρ(s)I1 (ρ(s)α2 )ds
+1
2e−αt/2
∫
x+t
x−tv0(s)I0 (ρ(s)α2 )ds, ρ(s; x , t) =
√t2 − (x − s)2.
25 / 36

Solution formula in 1D
Instead, use basis functions obtained by propagating polynomial initialdata:
u(x ,0) = u0(x) = xαj , u(x ,0) = v0(x) = 0,
andu0(x) = 0, v0(x) = xβj
with∣αj ∣ ≤ p ∣βj ∣ ≤ p − 1.
In 1D solution is then given by the d’Alambert-like formula
u(x , t) =1
2[u0(x − t) + u0(x + t)] e−αt/2
+α
4e−αt/2
∫
x+t
x−tu0(s)I0 (ρ(s)α2 ) +
t
ρ(s)I1 (ρ(s)α2 )ds
+1
2e−αt/2
∫
x+t
x−tv0(s)I0 (ρ(s)α2 )ds, ρ(s; x , t) =
√t2 − (x − s)2.
25 / 36

Solution formula ctd.
Rearranging (the last term)
1
2te−αt/2
∫
1
0[v0(x + st) + v0(x − st)] I0 (αt2
√1 − s2)ds.
For example for v0(x) = x2
x2te−αt/2∫
1
0I0 (αt2
√1 − s2)ds + t3e−αt/2
∫
1
0s2I0 (αt2
√1 − s2)ds.
Corresponding term in 3D
te−αt/2
1
∫
0
−∫∂B(0,1)
[v0(x + tsz) +Dv0(x + tsz)] ⋅zdSz I0 (αt2
√1 − s2)ds
Hence need efficient representation of functions of the type
%j(t) = ∫1
0s j I0 (αt2
√1 − s2)ds
26 / 36

Solution formula ctd.
Rearranging (the last term)
1
2te−αt/2
∫
1
0[v0(x + st) + v0(x − st)] I0 (αt2
√1 − s2)ds.
For example for v0(x) = x2
x2te−αt/2∫
1
0I0 (αt2
√1 − s2)ds + t3e−αt/2
∫
1
0s2I0 (αt2
√1 − s2)ds.
Corresponding term in 3D
te−αt/2
1
∫
0
−∫∂B(0,1)
[v0(x + tsz) +Dv0(x + tsz)] ⋅zdSz I0 (αt2
√1 − s2)ds
Hence need efficient representation of functions of the type
%j(t) = ∫1
0s j I0 (αt2
√1 − s2)ds
26 / 36

Solution formula ctd.
Rearranging (the last term)
1
2te−αt/2
∫
1
0[v0(x + st) + v0(x − st)] I0 (αt2
√1 − s2)ds.
For example for v0(x) = x2
x2te−αt/2∫
1
0I0 (αt2
√1 − s2)ds + t3e−αt/2
∫
1
0s2I0 (αt2
√1 − s2)ds.
Corresponding term in 3D
te−αt/2
1
∫
0
−∫∂B(0,1)
[v0(x + tsz) +Dv0(x + tsz)] ⋅zdSz I0 (αt2
√1 − s2)ds
Hence need efficient representation of functions of the type
%j(t) = ∫1
0s j I0 (αt2
√1 − s2)ds
26 / 36

Damped wave equation: Efficient implementation
Need efficient representation of functions of the type
%j(t) = ∫1
0s j I0 (αt2
√1 − s2)ds
In Matlab: Chebfun works well.
Note computations are done on a small space-time element, i.e.t ∈ (0,h) for a small h > 0.
Can use truncated Taylor expansions of analytic functions I0 and I1with efficiency increasing for decreasing h.
We expect similar effect for any lower order terms.
27 / 36

Changes to the analysis
Polynomial in space Ô⇒ the same discrete inverse inequalities used+ the extra term decreases energy Ô⇒ choice of parameters,stability and quasi-optimality proof identical.
Approximation properties of the discrete space (in 1D): Away from the boundary, in each space-time element K × (t−, t+)
project solution to K and neighbouring elements at time t− topolynomials and propagate.
At boundary, extend exact solution anti-symmetrically and againproject and propagate.
28 / 36

Outline
1 Motivation
2 An interior-penalty space-time dG method
3 Damped wave equation
4 Numerical results
29 / 36

One dimensional settingSimple 1D setting:
Ω = (0,1), a ≡ 1.
Initial data
u0 = e−( x−5/8
δ)
2
, v0 = 0, δ ≤ δ0 = 7.5 × 10−2.
Interested in having few degrees of freedom for decreasing δ ≤ δ0.
0 0.2 0.4 0.6 0.8 1
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
t = 1.5, δ = δ0
0 0.2 0.4 0.6 0.8 1
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
t = 1.5, δ = δ0/4
Energy of exact solution
exact energy = 12∥ux(x ,0)∥2
Ω ≈ 2δ−1∫
∞
−∞y 2e−2y2
dy = δ−1
√π
2√
2.
We compare with full polynomial space.Note for polynomial order p
2p + 1 Trefftz 12(p + 1)(p + 2)full polynomial space.
In all 1D experiments square space-time elements.
30 / 36

One dimensional settingSimple 1D setting:
Ω = (0,1), a ≡ 1.
Initial data
u0 = e−( x−5/8
δ)
2
, v0 = 0, δ ≤ δ0 = 7.5 × 10−2.
Energy of exact solution
exact energy = 12∥ux(x ,0)∥2
Ω ≈ 2δ−1∫
∞
−∞y 2e−2y2
dy = δ−1
√π
2√
2.
We compare with full polynomial space.
Note for polynomial order p
2p + 1 Trefftz 12(p + 1)(p + 2)full polynomial space.
In all 1D experiments square space-time elements.30 / 36

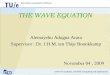
Error in dG-norm, δ = δ0, T = 1/4:
Trefftz poly Full poly
10 -3 10 -2 10 -1
h
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4p = 5
10 -3 10 -2 10 -1
h
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4p = 5
Trefftz p-convergence (fixed h in space and time):
1 2 3 4 5 6 7 8 9 10p
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
31 / 36

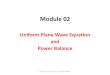
Energy conservation
For δ = δ0/4:
Trefftz poly Full poly
10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3
Time
0
5
10
15
20
25
30
35
Ener
gy
Energy, p=1Energy, p=2Energy, p=3Energy, p=4Exact Energy
10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3
Time
0
5
10
15
20
25
30
35
Ener
gyEnergy, p=1Energy, p=2Energy, p=3Energy, p=4Exact Energy
32 / 36

Relative error for decreasing δ
errorδ = (δ
2∥u(⋅,T ) − uh(⋅,T
−)∥
2Ω +
δ
2∥∇u(⋅,T ) −∇uh(⋅,T
−)∥
2Ω)
1/2
10 -2 10 -1 10 0 10 1
h=/
10 -10
10 -8
10 -6
10 -4
10 -2
10 0
Err
or
p=2, / = /0p=3, / = /0p=4,/ = /0p=5, / = /0p=2, / = /0=2p=3, / = /0=2p=4, / = /0=2p=5, / = /0=2p=2, / = /0=4p=3, / = /0=4p=4, / = /0=4p=5, / = /0=4
33 / 36

2D experimentOn square [0,1]2 with exact solution
u(x , y , t) = cos(√
2πt) sinπx sinπy .
Energy of error at final time:
error = (12∥u(⋅,T ) − uh(⋅,T
−)∥
2Ω + 1
2∥∇u(⋅,T ) −∇uh(⋅,T−)∥
2Ω)
1/2.
Trefftz poly Full poly
0.02 0.03 0.04 0.05 0.06 0.07 0.080.090.1Mesh-size
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4
0.02 0.03 0.04 0.05 0.06 0.07 0.080.090.1Mesh-size
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4
34 / 36

Damped wave equation in 1D
Error in dG norm. Exact solution on Ω = (0,1):
u(x , t) = e(−αt/2) sin(πx)
⎡⎢⎢⎢⎢⎣
cos
√
π2 −α2
4t +
α
2√π2 − α2/4
sin
√
π2 −α2
4t
⎤⎥⎥⎥⎥⎦
.
Trefftz poly Full poly
10 1 10 2 10 3 10 4
Number of DOF
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4
10 1 10 2 10 3 10 4
Number of DOF
10 -8
10 -6
10 -4
10 -2
10 0
10 2
Err
or
p = 1p = 2p = 3p = 4
35 / 36

ConclusionsA space-time interior penalty dG method for the acoustic wave equation insecond order form:
Can be considered either as implicit time-stepping method or a largespace-time system.
Allows Trefftz basis functions, polynomial in space.
Fewer degrees of freedom than full polynomial method and requiresintegration only over the space-time skeleton.
Stability and convergence analysis available.
Also practical for damped wave equation.
To do:
A posteriori error analysis
Adaptivity in h, p, wave directions.
Tent-pitching meshes allow quasi explicit time-stepping.
p-analysis in higher dimension.
Applications.
36 / 36

ConclusionsA space-time interior penalty dG method for the acoustic wave equation insecond order form:
Can be considered either as implicit time-stepping method or a largespace-time system.
Allows Trefftz basis functions, polynomial in space.
Fewer degrees of freedom than full polynomial method and requiresintegration only over the space-time skeleton.
Stability and convergence analysis available.
Also practical for damped wave equation.
To do:
A posteriori error analysis
Adaptivity in h, p, wave directions.
Tent-pitching meshes allow quasi explicit time-stepping.
p-analysis in higher dimension.
Applications.36 / 36