Embed Size (px)
Citation preview

Journal of Theoretical Biology 266 (2010) 712–722
Contents lists available at ScienceDirect
Journal of Theoretical Biology
0022-51
doi:10.1
n Corr
Medical
Tel.: +8
E-m
journal homepage: www.elsevier.com/locate/yjtbi
A stochastic model of neuronal growth cone guidance regulatedby multiple sensors
Taichiro Kobayashi a, Kenshi Terajima a,n, Motohiro Nozumi b, Michihiro Igarashi b, Kouhei Akazawa a
a Division of Information Science and Biostatistics, Niigata University Graduate School of Medical and Dental Sciences, 1 Asahimachi, Niigata 951-8520, Japanb Division of Molecular and Cellular Biology, Niigata University Graduate School of Medical and Dental Sciences, 1 Asahimachi, Niigata 951-8520, Japan
a r t i c l e i n f o
Article history:
Received 31 August 2009
Received in revised form
25 July 2010
Accepted 28 July 2010Available online 3 August 2010
Keywords:
Axonal growth
Filopodia
Axon guidance molecule
Computer simulation
Algorithm
93/$ - see front matter & 2010 Elsevier Ltd. A
016/j.jtbi.2010.07.036
espondence to: Department of Medical Inf
and Dental Hospital, 1 Asahimachi, Niigata 9
1 25 227 2472; fax: +81 25 227 0850.
ail address: [email protected] (K. Te
a b s t r a c t
Neuronal growth cones migrate directionally under the control of axon guidance molecules, thereby
forming synapses in the developing brain. The signal transduction system by which a growth cone
detects surrounding guidance molecules, analyzes the detected signals, and then determines the overall
behavior remains undetermined. In this study, we describe a novel stochastic model of this behavior
that utilizes multiple sensors on filopodia to respond to guidance molecules. Overall growth cone
behavior is determined by using only the concentration gradients of guidance molecules in the
immediate vicinity of each sensor. The detected signal at each sensor, which is treated as a vector
quantity, is sent to the growth cone center and then integrated to determine axonal growth in the next
step by means of a simple vector operation. We compared the results of computer simulations of axonal
growth with observations of actual axonal growth from co-culture experiments using olfactory bulb
and septum. The probabilistic distributions of axonal growth generated by the computer simulation
were consistent with those obtained from the culture experiments, indicating that our model accurately
simulates growth cone behavior. We believe that this model will be useful for elucidating the as yet
unknown mechanisms responsible for axonal growth in vivo.
& 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Axons protrude from the neuronal cell body, carry the outputof each neuron, and participate in the formation of synapses and,ultimately, neural networks. The tip of the growing axon in adeveloping neuron is called a growth cone (GC). In culturedneurons, the GC usually resembles a hand-shaped structure anddisplays ameboid movement (Barallobre et al., 2005; Mueller,1999). The ‘‘fingers’’ of the GC, known as filopodia, are mainlycomposed of dense actin filaments, and their behavior is governedby axon guidance molecules present in the surrounding environ-ment (Dent and Gertler, 2003; Huber et al., 2003). Some guidancemolecules, such as the neurotrophins and netrin, attract GCs;others, such as Slit1 and Sema3A, repel them (Barallobre et al.,2005; Huber et al., 2003). These molecules are believed to affectGCs by changing the distributions of their receptors, altering thebiochemical characteristics of intracellular signaling proteins,and/or changing the concentration of intracellular calcium.Ultimately, the guidance molecules induce extension or retraction
ll rights reserved.
ormatics, Niigata University
51-8520, Japan.
rajima).
of filopodia (Bouzigues et al., 2007; Fan and Raper, 1995; Lin andHolt, 2007; Maskery and Shinbrot, 2005; Whitford et al., 2002).Currently, the details of GC response to guidance molecules areusually analyzed by means of in vitro tissue culture experiments,and reports of these behaviors have been presented in previousresearch (Hu, 2001; Nguyen-Ba-Charvet et al., 2002; Stephens andHolder, 1987). However, there remain considerable technicalproblems in understanding how guidance molecules determinethe movement of GCs throughout the entire process of axonalgrowth in vivo. Therefore, an accurate simulation of GC behaviorunder various conditions is highly desirable for developmentalneurobiological research.
Simulation research has already produced several mathema-tical models of GC behavior regulated by guidance molecules. Inone such study, a simulation of axonal growth was developed toevaluate the binding affinity of guidance molecules for theirreceptors (Hentschel and van Ooyen, 1999). Other simulationswere developed to investigate the influence of GC turning incomputer-generated axonal trajectories (Krottje and van Ooyen,2007). Maskery et al. developed a mathematical model of GCbehavior induced by guidance molecules that was both determi-nistic and stochastic (Maskery et al., 2004). Van Veen et al.developed a multiple-sensor model representing a growth conewith blanching neurites (Van Veen, 1992). Goodhill et al. devel-oped a comprehensive mathematical model of a growth cone

T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722 713
(Goodhill et al., 2004). However, there have been no other studiesthat have utilized a model focusing on the as yet uncharacterizedsignal transduction system in which a growth cone detects axonalguidance cues, analyzes the gathered information, and finallydetermines its own behavior.
In this study, we propose a model of GC behavior that employsmultiple sensors designed for simulating the signal transductionsystem. We hypothesized the following condition in the signaltransduction system: (1) the signal detected at each filopodial tipcontains the magnitude and direction of the effects of surround-ing guidance molecules, which should be treated as a vectorquantity, (2) the signal detected at each filopodial tip is sent to thegrowth cone center, where all the signals are compared andintegrated to determine the overall growth cone behavior in thenext step, and (3) the processes of comparison and integration canbe achieved by a simple vector operation. Using this model, wedeveloped and ran a computer simulation that attempts to predictGC behavior. We compared the simulation results with those
Fig. 1. Flowchart of algorithm for axonal growth. The algorithm specifying growth con
vector, (2) modification of the initial axonal growth vector based on the presence of guid
these steps are described in Sections 2.1.1–2.1.3 in the main text.
obtained from co-culture experiments using rat olfactory bulband septum, the combination of which is suitable for observingactual axonal growth in response to a repulsive cue. Weconfirmed that the probabilistic distributions of axonal trajec-tories derived from the computer simulation were consistent withthose from the culture experiments. Thus, we conclude that ourmodel accurately represents GC behavior.
2. Materials and methods
2.1. Algorithms for axonal growth
The algorithm specifying GC behavior is composed of three parts:(1) generation of the initial axonal growth vector, (2) modification ofthe initial axonal growth vector based on the presence of guidancemolecules, and (3) regulation of the direction of axonal growth. Theflowchart for this algorithm is shown in Fig. 1.
e behavior is composed of three parts: (1) generation of the initial axonal growth
ance molecules, and (3) regulation of the direction of axonal growth. The details of

T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722714
2.1.1. Generation of the initial axonal vector
The initial setting of the direction and magnitude of axonalgrowth in the next step is defined by an initial growth vector.Although actual axonal growth occurs in three-dimensional space,the target of the computer simulations in this study is a two-dimensional fluorescence micrograph obtained from cultureexperiment. Therefore, the two-dimensional simulated axonimage is created by projecting the three-dimensional axontrajectories onto the specific xy-plane. Firstly, the initial axonalgrowth vector is constructed in three-dimensional space by usinga random walk model. The vector is then projected onto a two-dimensional xy-plane. The x- and y-elements of the vector followa two-dimensional normal distribution with x- and y-variances s2
x
and s2y . This projected two-dimensional vector is an initial growth
vector, which is then modified in the next step.
2.1.2. Modification of the initial axonal growth vector
It is commonly accepted that each filopodium has a sensor inits tip, which detects the presence of guidance molecules in thesurrounding environment (Bentley and Toroian-Raymond, 1986).Here, an odd number k sensors, from sensor #1 to sensor #k, areassumed to be placed equiangularly with an interval angle yaround the current position of the GC. The direction of the sensor#ðkþ1Þ=2, which is located in the middle position of the sensors,is identical to that of the growth vector generated in the previousstep of axonal growth (hereafter referred to as the ‘‘previousgrowth vector’’). These conditions were specified to ensure thatthe sensors were located symmetrically with respect to thedirection of axonal growth. The length of each sensor is providedby a single parameter l. In the vicinity of the GC, attractant and/orrepellant guidance molecules may be present (Fig. 2A). However,it has not been confirmed biologically whether each sensor in thefilopodial tip measures the absolute concentration of the guidancemolecules or the relative concentration, i.e., the concentrationgradient, of the molecules. Nevertheless, even when theconcentration of a guidance molecule around a filopodial tip issufficiently high, axonal growth toward a specific direction is notobserved in the absence of a concentration gradient around thefilopodial tip. Therefore, each sensor can measure theconcentration of the guidance molecules at a filopodial tip andcalculate the concentration gradient, which is believed to be thechemotactic factor responsible for growth cone behavior (Adamset al., 2005; Lang et al., 2008). Furthermore, guidance moleculesaffect growth cone behavior, not the axonal growth. In general,axonal growth can be distinguished from axon guidance. Ideally,neither attractant nor repellant guidance molecules affect axonalgrowth, although these molecules influence the rates of axonalgrowth when they have growth-promoting or -inhibiting activity.However, we believe that the overall effects of guidancemolecules on growth cone behavior can be treated as vectorquantities because these effects have direction and magnitude.
Initially, the concentration gradient vector that is detected byeach sensor is constructed. The direction of each concentrationgradient vector is identical to the direction of the correspondingsensor, and is inverted when the guidance molecule is repellant.The length of each concentration gradient vector is proportionalto that of the concentration gradient detected by the correspond-ing sensor. Then, the initial growth vector is modified by using amodifying vector, which is calculated by summing the concentra-tion gradient vectors (Fig. 2B). A similar concept was used in themodel of angiogenesis proposed by Milde et al. (Milde et al.,2008). After the modification of the initial growth vector iscompleted, the turning angle c between the modified growthvector and the previous growth vector is calculated. In the next
section, we will discuss whether this turning angle c isunrealistically large.
2.1.3. Regulation of the direction of axonal growth
Modification of the initial growth vector can sometimes resultin unrealistically large GC turning (Baker et al., 2006). In order toprohibit such fatal turning, the acceptable angle of GC turning f isalso calculated at each step of axonal growth. The algorithm forcalculating f, which is based on the work of Krottje et al. (Krottjeand van Ooyen, 2007), is as follows (Fig. 2C):
(1)
An initial value of f is given a priori. (2) One sensor is selected, and the concentration gradients ofguidance molecules detected by bilaterally adjacent sensorsare compared at the growth cone center, where the detectedconcentration gradients are gathered and integrated in thevector operation. If the difference in the concentrationgradients is greater than the predefined lower threshold Dc,then f is increased by 11. This process is repeated for all thesensors to determine the final value of f.
(3)
If the angle between the modified growth vector and theprevious growth vector is less than f, the modified growthvector is accepted as the confirmed growth vector in thecurrent step of axonal growth. Otherwise, no growth vector isgenerated.2.2. Computer simulations
In this study, we simulated axonal growth as observed in atissue culture experiment using rat olfactory bulb and septumcontaining the repellant guidance molecule Slit2. As described inthe previous section, the three-dimensional trajectories generatedby the subsequent computer simulations were projected onto atwo-dimensional plane so that the simulated axonal trajectoriescould be compared directly with the cultured axon trajectories, asdepicted in a two-dimensional photograph. The simulationparameters used in this study are shown in Table 1. Thenumber of sensors, k, was defined as 9, and the angle of the twoneighboring sensors, y, was defined as 101. The length of eachsensor l was assumed to be constant at 0.01 to simplify theconditions, although it seems more likely to be variable inbiological settings. The initial value of the acceptable angle ofGC turning f was defined as 51, and the lower threshold of thedifference in concentration gradients Dc for increasing f wasdefined as 0.001. The x- and y-variances of ðs2
x ,s2y Þwere defined as
(0.02, 0.02), a value proposed by Maskery et al. (Maskery et al.,2004).
The simulation program was written in the C programminglanguage using the Microsoft Visual C++ .NET standard packageversion 2003 (Microsoft Corporation, WA, USA). The axonaltrajectories generated by the computer simulation were plottedby using Matlab 2007b (Mathworks, MA, USA). To verify theaccuracy of our simulation program, the following three simula-tions were performed.
2.2.1. Simulation under virtual, simplified conditions
To evaluate the effects of axon guidance molecules on axonaltrajectories, a simplified simulation was developed (Sakumuraet al., 2005). On a two-dimensional xy-plane, attractant guidancemolecules were assumed to be released continuously from asingle point (0, 0), and to diffuse subsequently into thesurrounding environment. The concentration followed a two-dimensional normal distribution with x- and y-variances ofðB2
x ,B2y Þ. The starting point of axonal growth was located at a
single point (–7, –7). In order to determine the value of ðB2x ,B2
y Þ

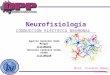
Fig. 2. The use of multiple sensors to modify the direction of axonal growth. (A) There are 9 sensors placed equiangularly around the current position of the growth cone.
The direction of the middle sensor, which is indicated by the solid line, is identical to that of the growth vector constructed in the previous step of the axonal growth
(previous growth vector). A concentration gradient vector is constructed by each sensor. The direction of each concentration gradient vector is inverted when the guidance
molecule is repellant. (B) All the concentration gradient vectors are summed and a modifying vector is generated. The initial growth vector is then altered by the modifying
vector. (C) In order to prohibit unrealistically large growth cone turns, the acceptable angle of growth cone turning f is calculated.
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722 715
used in the later simulations, we performed this simulation withðB2
x ,B2y Þ ¼ ð0,0Þ, i.e., without the guidance molecules, (1, 1), (3, 3), or
(5, 5).
2.2.2. Simulation of a single axonal trajectory traced on a cultured
axon image
We simulated the growth of a single axon traced on an imageof an axon obtained from the culture experiment. First, we chose asingle axon of interest on the cultured axon image. By referring tothe axon image, the starting point of the single axon was placed at(�7, �7), the center of gravity of the septum was placed at (0, 0),and the position and size of the areas corresponding to theseptum were specified on the xy-plane. The repellant guidancemolecule Slit2 was assumed to be released continuously from 50
equally spaced points around the area of the septum, and to thendiffuse into the surrounding environment (Tessier-Lavigne andGoodman, 1996). The concentration followed a two-dimensionalnormal distribution with x- and y-variances of ðB2
x ,B2y Þ ¼ ð3,3Þ. The
growth vector in the first step of axonal growth was specified inorder to make it identical to that of the traced trajectory.
2.2.3. Simulation of an image of a complete cultured axon
Finally, we simulated the image of a complete axon obtainedfrom the culture experiment. In addition to the simulationsettings described in the previous section, the area correspondingto the olfactory bulb was specified on the xy-plane. Axonal growthwas assumed to occur in any direction from any location within

Fig. 3. Representative results of computer simulation in a virtual simplified
setting. In the absence of guidance molecules, axonal trajectories generated by 20
runs of the computer simulation are distributed symmetrically along a vertical
axis (A); in contrast, axonal trajectories are ‘‘attracted’’ to the release point of the
guidance molecules (B).
Table 1Simulation parameters.
Description Parameter Symbol Value used in this study
Sensor Number of sensors k 9
Angle of neighboring two sensors y 101
Length of sensor l 0.01
Axonal growth Variance of each element of initial growth vector ðs2x ,s2
y Þ (0.02, 0.02)
Accepted angle of growth cone turning f 51 as initial value
Concentration threshold for increasing f Dc 0.0001
Starting area Coordinate of starting area by simulation setting (x, y) Provided as area or point
Axon guidance molecules Coordinate of release point ðmx ,myÞ Provided as area or point by simulation setting
Variance in concentration distribution ðB2x ,B2
y Þ (0, 0), (1, 1), (3, 3), (5, 5)
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722716
the area, and the number of axons was defined as 300, a valuebased on the measurement of the cultured axon image.
2.3. Tissue culture and axon imaging
2.3.1. Tissue culture
Olfactory bulb and septum were isolated from SD rat embryos(Japan SLC Inc., Shizuoka, Japan) at 14–19 days after conceptionand added to Dulbecco’s Modified Essential Medium (Wako PureChemical Industries Ltd., Osaka, Japan) after they had beenimmersed in collagen gel (Nitta Gelatin Inc., Osaka, Japan). Thosedissected tissues were co-cultured in neurobasal medium with0.5 mM L-glutamate in a humidified incubator at 37 1C and 5%CO2. Twenty-four hours after being immersed, the culturemedium was renewed. After 5 days culture, 4% paraformalde-hyde/phosphate-buffered saline was added to fix the axons andtissue, which were then left to incubate overnight.
2.3.2. Immunofluorescence
The axons were stained using the indirect immunocytochem-ical technique. As the primary antibody, mouse monoclonal anti-a-tubulin IgG antibody (Sigma-Aldrich Japan K.K, Tokyo, Japan)was added through PHTX (PBS/1% heat-inactivated goat serum/1%Triton X-100). After settling, excess antibodies were removed bycleaning the PHTX. Next, as the secondary antibody, goatpolyclonal anti-mouse IgG antibody conjugated with Alexa 488(Invitrogen Japan K.K., Tokyo, Japan) was added through PHTX tothe diluted solution.
2.3.3. Fluorescence microscopy
Labeled axons were imaged with a stereo fluorescencemicroscope. The fluorescence micrographs were collected with acomplementary metal oxide semiconductor (CMOS) camera, theLMZ-150 (Nikon Corp., Tokyo, Japan).
3. Results
3.1. Simulation under virtual, simplified conditions
Fig. 3 shows the results of 20 runs of the computer simulationunder virtual, simplified conditions for evaluating the effects ofaxon guidance molecules on axonal trajectories. As described inSection 2.2.1, the starting point of the simulation is (�7, �7). Inthe absence of guidance molecules, the axonal trajectories weresymmetrically distributed along a vertical axis, which suggeststhat the direction and magnitude of axonal growth are onlydetermined by a random-walk model (Fig. 3A). In contrast, the
axonal trajectories were ‘‘attracted’’ to the release point of theguidance molecules (Fig. 3B). Here, in order to measure the effectof a guidance molecule quantitatively, the final GC turning angleis defined as a phase angle of a position vector at the axonaltrajectory end. When an axonal trajectory is symmetrical along avertical axis, the final GC turning is 901. When an axonaltrajectory is attracted rightward, the final GC turning angle issmaller than 901; when an axonal trajectory is attracted leftward,the final GC turning angle is larger than 901. The values of final GCturning angles were summarized as histograms after thesimulations. The simulations were performed under severalconditions of the normal distribution of the concentration ofguidance molecules with x- and y-variances of ðB2
x ,B2y Þ. Fig. 4A–D

Fig. 4. Effect of guidance molecules on axonal trajectories generated by computer simulation. The histograms of the final growth cone turning angle at
ðB2x ,B2
y Þ ¼ ð0,0Þ, ð1,1Þ, ð3,3Þ, and (5, 5) after 400 runs of the computer simulation under the same virtual conditions as in Fig. 3. When guidance molecules have no
effect on axonal growth, the histogram shows a symmetrical distribution with an axis of symmetry at 901 (A and B). However, when the guidance molecules have an
attractant effect, the histogram is skewed leftward, with a peak at 451 (C). When ðB2x ,B2
y Þ is increased, the distortion of the histogram also increases (D).
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722 717
shows histograms after the simulation of 20 axons�400 times,with ðB2
x ,B2y Þ ¼ ð0,0Þ, ð1,1Þ, ð3,3Þ, or (5, 5). When the guidance
molecules had no effect on axonal growth, the histogram patternshows a symmetrical distribution with an axis of symmetry at 901(Fig. 4A). In contrast, when they are attractive to GCs, the patternwas skewed leftward, creating a peak at 451. The skewnessappeared to start at the value of ðB2
x ,B2y Þ ¼ ð3,3Þ, which was
statistically significant using the Wilcoxon signed-rank test(Po0.001) (Fig. 4B and C). Furthermore, when ðB2
x ,B2y Þ increased,
distortion of the histogram also increased (Fig. 4D). These resultsare consistent with those reported by Sakumura et al. (Sakumuraet al., 2005). Thus, ðB2
x ,B2y Þ was defined as (3, 3) in the subsequent
simulations.
3.2. Simulation of the trajectory of a single cultured axon
Fig. 5A shows the overlaid axonal trajectories generated after20 runs of the simulation. We simulated the growth of a singleaxon traced on an image of an axon obtained from the cultureexperiment. As described in Section 2.2.2, the starting point of thesimulation is (�7, �7), and the center of gravity of the septumwas (0, 0). The black line represents the single axonal trajectorytraced on the axon image obtained from the culture experiment,and the dark gray lines show axonal trajectories generated by 20runs of the computer simulation. Fig. 5B shows a pseudocolorimage generated after 1000 runs of the simulation. As the densityof the axonal trajectories increases, the color of the pixels changesfrom blue to red. Fig. 5A shows that the simulated axonaltrajectories were not consistent with the single, traced axonaltrajectory. However, after 1000 runs of the simulation, the densitydistribution began to resemble that of the single, traced axonaltrajectory (Fig. 5B). Fig. 5C is a histogram of the final GC turningangle, and Fig. 5D is a histogram of the distance between thestarting point and the end point of each axonal trajectory. In thesetwo histograms, the actual measurements obtained from the
single, traced axonal trajectory are within the corresponding 95%confidence intervals that were calculated after 1000 runs of thesimulation. These findings show that the computer simulationusing our model successfully predicts the stochastic behavior of asingle GC.
3.3. Simulation of an entire cultured axon image
Slit is a chemorepellent, i.e., a repulsive guidance moleculethat GCs avoid, that is expressed in septum and guides axonprojection from the olfactory bulb to the telencephalon (Li et al.,1999). The repulsion of these axons from Slit is easily reprodu-cible by the explant culture combination of olfactory bulb andseptum. In the present study, we used this culture system toevaluate our theoretical model.
Fig. 6A–C shows the cultured axon images. Fig. 6A is an originalimmunofluorescence-labeled axon image, Fig. 6B is the sameimage in pseudocolor, and Fig. 6C is a schematic representation ofthe axon image. In the presence of septum releasing the repellantguidance molecule Slit2, the distribution of the axonal trajectoriesis strongly skewed, contralateral to the septum.
Fig. 7A and B shows the results of the computer simulationusing the settings described in Section 2.2.3. The areascorresponding to olfactory bulb and septum were specified onthe xy-plane by referring to the cultured axon image. Axonalgrowth was assumed to occur in any direction from any locationwithin the area of olfactory bulb, and the number of axons wasdefined as 300, a value based on the measurement of the culturedaxon image. Fig. 7A shows overlaid axonal trajectories generatedby 1000 runs of the simulation; Fig. 7B is the same image inpseudocolor. Fig. 7C shows overlaid axonal trajectories generatedby another simulation in which attractive guidance molecules arereleased from the area of the septum. Fig. 7A and C shows thatattractive and repellant guidance molecules have contrasting

Fig. 5. Representative results of the computer simulation generating a single axonal trajectory. (A) Overlaid axonal trajectories generated by the simulation. The black and
gray lines represent an axonal trajectory traced on the axon image from the culture experiments, and those from a single starting point generated by 20 runs of the
computer simulation, respectively. (B) A pseudocolor image of overlaid axonal trajectories generated by 1000 runs of the simulation. There is a wide variation in the
distribution of the simulated axonal trajectories, but they are distributed symmetrically. (C and D) Histograms of the final GC turning angle (C) and the distance between
the starting and end points of each axonal trajectory (D). The actual values measured in the traced axonal trajectories are indicated in each histogram (arrows). Both of the
actual values are within the 95% confidence intervals of the corresponding values generated by 1000 runs of the simulation.
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722718
effects on the axonal trajectories, which demonstrates the validityof our model.
To compare the simulated axon image with the original image,both axon images were resized to 150�150 pixels. Next, usingthe method described by Castro et al. (de Castro et al., 1999), tworegions, namely, avoidance and growth regions, were defined onthe axon images (Fig. 8A). Finally, the ratio of pixels displayingaxonal trajectories to the total number of pixels, which indicatesthe probability of the existence of axonal trajectories, wascalculated in each region (Fig. 8B). In a comparison of theoriginal and simulated axon images, the graph shows that themedian values of pixel ratios are very similar, althoughthe dispersion of pixel ratios obtained from the cultured axonimages was much wider than that of the simulated axon images.This phenomenon is likely due to two factors. First, the target of
the computer simulation was a culture experiment performedunder ideal conditions, i.e., (1) guidance molecules arecontinuously released at a constant rate from the source point,(2) elongation length in each step is constant, (3) the number offilopodia is constant, (4) the length of each filopodium is constant,etc. Fig. 8C shows the effects of these ideal conditions on theresults of Fig. 8B. Randomization of filopodia length, length ofelongation, and the release rate of guidance molecules results inmuch wider dispersion of pixel ratios than in the originalsimulation. Second, measurement errors occur when makingfluorescence micrographs.
Fig. 9 shows effects of the number of sensors on the simulatedaxon images. Fig. 9A–D shows the images generated with k¼1(single-sensor model), 9, 17, and 21, respectively. When k
increases, the effect of the repellant guidance molecules

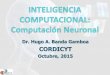
Fig. 6. Representative image of a complete axon from the culture experiment. (A) An original immunofluorescence-labeled image of an axon from the culture experiment
using rat olfactory bulb and septum; (B) a pseudocolor rendering of (A); and (C) a schematic representation of the axonal image. The release of a repellant guidance
molecule, Slit2, causes the distribution of the axonal trajectories to be skewed strongly contralateral to the septum.
Fig. 7. Representative results of a computer simulation generating multiple axonal trajectories. (A) Overlaid axonal trajectories derived from multiple starting points after
1000 runs of the simulation; (B) a pseudocolor rendering of (A). Highly random axonal trajectories are visible, as is an oval avoidance area on the left side, which
corresponds to the field of repellant guidance molecules. (C) Overlaid axonal trajectories generated by another simulation in which attractive guidance molecules are
released from the area of septum. This figure shows the contrasting effects of attractive guidance molecules on axonal trajectories.
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722 719

Fig. 8. Ratio of pixels displaying axonal trajectories in images of cultured and simulated axons. To compare the complete axon image obtained from the tissue culture
experiment (Fig. 6A) with a simulated axon image (Fig. 7A), the simulation generated 300 axonal trajectories per run for 1000 runs. The computer-generated axon images
and cultured axon image were resized to 150�150 pixels, and two regions, namely, the avoidance and growth regions, were defined on the axon image, as shown in (A).
Then, the proportion of pixels displaying axonal trajectories was calculated in each region. (B) shows a box-and-whisker plot of the calculated values in the avoidance
region and growth region. The box indicates the interquartile range of values from the simulated axon images; the line within the box indicates the median. Whiskers
above and below the box indicate the 90th and 10th percentiles, respectively. In both regions, the ratio of the pixels displaying axonal trajectories is highly consistent
between the images of cultured and simulated axons. (C) shows the effects of randomizing the simulation parameters. Randomization of filopodia length, length of
elongation, and the release rate of guidance molecules results in much wider dispersion of pixel ratios than in the original simulation.
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722720
becomes much clearer. As compared with the image generatedusing the single-sensor model (Fig. 9A), there are fewer axons inthe avoidance area and axonal trajectories are more abruptlycurved in the image generated using the multiple-sensor models(Fig. 9B–D). Furthermore, when sufficiently large, the number ofsensors does not have a substantial effect on the resultant axonaltrajectories (Fig. 9C and D).
4. Discussion
Neuronal growth cone guidance is one of the most interestingtopics in biological research. Previous seminal studies have shownthat filopodia and their components, namely, actin filaments, playan essential role in axon guidance through multiple signaltransduction pathways (Bentley and Toroian-Raymond, 1986;Zheng et al., 1996; Zhu et al., 2007). However, the details of thesignal transduction system that determines growth cone behavior
have not been elucidated. Therefore, the most distinctive andimportant feature of this study is that we developed a multiple-sensor GC model focusing on the signal transduction system,although a similar multiple-sensor model of the growth cone hasbeen previously developed by a few researchers. The first featureinevitably leads to the second feature of our model, the smallernumber of parameters defined in our model than in theseprevious studies. This second feature enables us to consider moreaccurately the discrete effects of each parameter on the behaviorof a growth cone in comparing the results of our simulation withthose of the culture experiments.
Our multiple-sensor model of GC behavior at the time of axonpathfinding utilizes multiple sensors and is based upon twoassumptions: (1) each filopodium has a sensor for detecting theconcentration gradient of guidance molecules, and (2) only localinformation on the concentration gradient is integrated and usedto determine the behavior of the whole GC. These assumptions arebiologically defensible because a GC alone cannot sense in

Fig. 9. Representative images of simulated axons generated by the growth cone model with different numbers of filopodia. The simulations were run under identical
conditions (Fig. 7) with the number of filopodia k¼1 (A), 9 (B), 17 (C), or 21 (D). The position of the septum is indicated in each figure. When k increases, the effect of the
repellant guidance molecules becomes much clearer. As compared with the image generated using the single-sensor model (A), there are fewer axons in the avoidance area
and axonal trajectories are more abruptly curved in the image generated using the multiple-sensor model (B–D). Furthermore, when sufficiently large, the number of
sensors does not have a substantial effect on the resultant axonal trajectories (C, D).
T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722 721
advance the distant origin of guidance molecules and thecharacteristics of their distribution; indeed, a GC can only detectthe concentration gradient in its vicinity and integrate localinformation on the concentration gradient acquired by eachsensor in order to modify subsequent GC behavior.
Furthermore, we simultaneously performed a culture experi-ment to verify the accuracy of our model. That is to say, wedeveloped and ran the computer simulation program whileincubating the nerve tissue obtained from rats in our laboratory.This enabled us to more carefully simulate the biologicalphenomena actually observed in our experiments. Also, we canimmediately make use of the results of the molecular biologicalstudies in our laboratory in order to improve our model.
Another important characteristic of our model is that GCbehavior is determined exclusively by a stochastic process. Evenwhen the initial conditions are identical, axonal trajectories arenever the same; instead, only the probability of the axonaltrajectory is determined. This assumption is also biologicallyplausible. It is very important to consider this characteristic of ourmodel in any attempt to reproduce it. Therefore, the resultsshown in Fig. 5A are not at all surprising: they demonstrate thevaried axonal trajectories generated by the computer simulationusing our model. However, the more the simulation is repeated,the more the distribution of the axonal trajectories begins toresemble that of the actual axonal trajectory obtained from the
culture experiments, as shown in Fig. 5B. This finding demon-strates that our model successfully simulates the behavior of asingle GC.
Of course, caution is warranted when comparing the results ofour simulation with those of the culture experiments. Highlyrandom axonal trajectories were observed in axon images fromboth the culture experiments and the simulation. Therefore, itwas impossible to directly compare axonal trajectories by super-imposing the two images. Thus, we used probabilistic distribu-tions generated by running the simulation many times. In acomparison of axon images from the cultures and the simulation,the ratio of pixels displaying axonal trajectories, which reflectstheir probabilistic distribution, was very similar. This resultdemonstrates that our model permits accurate simulation of theentire behavior of multiple and single GCs.
Despite the success of our model, some limitations must beacknowledged. In comparison with previous single-sensor mod-els, unrealistic GC turning is more likely to occur in our multiple-sensor model, despite our attempt to limit the angle of GC turning.An image of a simulated axon generated using the multiple-sensor model reveals an avoidance area relatively free fromaxonal growth and axonal trajectories that were more abruptlycurved than those visible in an image generated using a single-sensor model (Fig. 9). In addition, the rules governingthe algorithms regulating the ‘‘stiffness’’ of axonal fibers

T. Kobayashi et al. / Journal of Theoretical Biology 266 (2010) 712–722722
(Section 2.1.3) are artificial, and not biologically proven. To obtainmore natural axonal trajectories, it will be necessary to refine ouralgorithm, using biologically proven rules to regulate GC turning.Another limitation of our algorithm is that we did not modelmutual interaction among neighboring axons or the conditions forterminating GC movement. These limitations will be addressed infuture research.
In conclusion, our findings clearly demonstrate that our modelsuccessfully produces an accurate simulation of actual GC behaviorin axon pathfinding. We believe this model will prove useful forelucidating the mechanisms that underlie axonal growth in vivo.
Acknowledgements
We thank Dr. Kaoru Katoh (National Institute of AdvancedIndustrial Science and Technology, Ibaraki, Japan) for valuablediscussions throughout this study. This study was supported bygrants from the Ministry of Education, Culture, Sports, Science andTechnology of Japan, a Strategic Research Grant from NiigataUniversity, and a grant for Promotion of Niigata UniversityResearch Projects.
References
Adams, D.N., Kao, E.Y., Hypolite, C.L., Distefano, M.D., Hu, W.S., Letourneau, P.C.,2005. Growth cones turn and migrate up an immobilized gradient of thelaminin IKVAV peptide. J. Neurobiol. 62, 134–147.
Baker, K.A., Moore, S.W., Jarjour, A.A., Kennedy, T.E., 2006. When a diffusible axonguidance cue stops diffusing: roles for netrins in adhesion and morphogenesis.Curr. Opinion Neurobiol. 16, 529–534.
Barallobre, M.J., Pascual, M., Del Rio, J.A., Soriano, E., 2005. The Netrin family ofguidance factors: emphasis on Netrin-1 signalling. Brain Res. Rev. 49, 22–47.
Bentley, D., Toroian-Raymond, A., 1986. Disoriented pathfinding by pioneerneurone growth cones deprived of filopodia by cytochalasin treatment. Nature323, 712–715.
Bouzigues, C., Morel, M., Triller, A., Dahan, M., 2007. Asymmetric redistribution ofGABA receptors during GABA gradient sensing by nerve growth conesanalyzed by single quantum dot imaging. Proc. Natl. Acad. Sci. USA 104,11251–11256.
de Castro, F., Hu, L., Drabkin, H., Sotelo, C., Chedotal, A., 1999. Chemoattraction andchemorepulsion of olfactory bulb axons by different secreted semaphorins.J. Neurosci. 19, 4428–4436.
Dent, E.W., Gertler, F.B., 2003. Cytoskeletal dynamics and transport in growth conemotility and axon guidance. Neuron 40, 209–227.
Fan, J., Raper, J.A., 1995. Localized collapsing cues can steer growth cones withoutinducing their full collapse. Neuron 14, 263–274.
Goodhill, G.J., Gu, M., Urbach, J.S., 2004. Predicting axonal response to moleculargradients with a computational model of filopodial dynamics. Neural Comput.16, 2221–2243.
Hentschel, H.G., van Ooyen, A., 1999. Models of axon guidance and bundlingduring development. Proc. R. Soc. Lond. B Biol. Sci. 266, 2231–2238.
Hu, H., 2001. Cell-surface heparan sulfate is involved in the repulsive guidanceactivities of Slit2 protein. Nat. Neurosci. 4, 695–701.
Huber, A.B., Kolodkin, A.L., Ginty, D.D., Cloutier, J.F., 2003. Signaling at the growthcone: ligand-receptor complexes and the control of axon growth and guidance.Annu. Rev. Neurosci. 26, 509–563.
Krottje, J.K., van Ooyen, A., 2007. A mathematical framework for modeling axonguidance. Bull. Math. Biol. 69, 3–31.
Lang, S., von Philipsborn, A.C., Bernard, A., Bonhoeffer, F., Bastmeyer, M., 2008.Growth cone response to ephrin gradients produced by microfluidic networks.Anal. Bioanal. Chem. 390, 809–816.
Li, H.S., Chen, J.H., Wu, W., Fagaly, T., Zhou, L., Yuan, W., Dupuis, S., Jiang, Z.H., Nash,W., Gick, C., Ornitz, D.M., Wu, J.Y., Rao, Y., 1999. Vertebrate slit, a secretedligand for the transmembrane protein roundabout, is a repellent for olfactorybulb axons. Cell 96, 807–818.
Lin, A.C., Holt, C.E., 2007. Local translation and directional steering in axons. EMBOJ. 26, 3729–3736.
Maskery, S., Shinbrot, T., 2005. Deterministic and stochastic elements of axonalguidance. Annu. Rev. Biomed. Eng. 7, 187–221.
Maskery, S.M., Buettner, H.M., Shinbrot, T., 2004. Growth cone pathfinding:a competition between deterministic and stochastic events. BMC Neurosci. 5, 22.
Milde, F., Bergdorf, M., Koumoutsakos, P., 2008. A hybrid model for three-dimensional simulations of sprouting angiogenesis. Biophys. J. 95, 3146–3160.
Mueller, B.K., 1999. Growth cone guidance: first steps towards a deeperunderstanding. Annu. Rev. Neurosci. 22, 351–388.
Nguyen-Ba-Charvet, K.T., Plump, A.S., Tessier-Lavigne, M., Chedotal, A., 2002. Slit1and slit2 proteins control the development of the lateral olfactory tract.J. Neurosci. 22, 5473–5480.
Sakumura, Y., Tsukada, Y., Yamamoto, N., Ishii, S., 2005. A molecular model for axonguidance based on cross talk between rho GTPases. Biophys. J. 89, 812–822.
Stephens, N., Holder, N., 1987. The pattern of innervation in serially duplicatedaxolotl limbs: further evidence for the existence of local pathway cues?Development 100, 479–487.
Tessier-Lavigne, M., Goodman, C.S., 1996. The molecular biology of axon guidance.Science 274, 1123–1133.
Van Veen, M., 1992. A model for outgrowth of branching neurites. J. Theor. Biol.159, 1–23.
Whitford, K.L., Marillat, V., Stein, E., Goodman, C.S., Tessier-Lavigne, M., Chedotal,A., Ghosh, A., 2002. Regulation of cortical dendrite development by Slit-Robointeractions. Neuron 33, 47–61.
Zheng, J.Q., Wan, J.J., Poo, M.M., 1996. Essential role of filopodia in chemotropicturning of nerve growth cone induced by a glutamate gradient. J. Neurosci. 16,1140–1149.
Zhu, X.J., Wang, C.Z., Dai, P.G., Xie, Y., Song, N.N., Liu, Y., Du, Q.S., Mei, L., Ding, Y.Q.,Xiong, W.C., 2007. Myosin X regulates netrin receptors and functions in axonalpath-finding. Nat. Cell Biol. 9, 184–192.