Embed Size (px)
Citation preview
Tampere University of Technology
A Survey on Wireless Transmitter Localization Using Signal Strength Measurements
CitationNurminen H Dashti M amp Picheacute R (2017) A Survey on Wireless Transmitter Localization Using SignalStrength Measurements Wireless Communications and Mobile Computing 2017 [2569645]httpsdoiorg10115520172569645Year2017
VersionPublishers PDF (version of record)
Link to publicationTUTCRIS Portal (httpwwwtutfitutcris)
Published inWireless Communications and Mobile Computing
DOI10115520172569645
LicenseCC BY
Take down policyIf you believe that this document breaches copyright please contact cristautunifi and we will remove accessto the work immediately and investigate your claim
Download date21042020
Review ArticleA Survey on Wireless Transmitter Localization Using SignalStrength Measurements
Henri Nurminen1 Marzieh Dashti2 and Robert Picheacute1
1Tampere University of Technology Tampere Finland2Nokia Bell Labs Dublin Ireland
Correspondence should be addressed to Henri Nurminen henrinurminentutfi
Received 3 October 2016 Accepted 23 January 2017 Published 16 February 2017
Academic Editor Sunwoo Kim
Copyright copy 2017 Henri Nurminen et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Knowledge of deployed transmittersrsquo (Tx) locations in a wireless network improves many aspects of network managementOperators and building administrators are interested in locating unknown Txs for optimizing new Tx placement detecting andremoving unauthorized Txs selecting the nearest Tx to offload traffic onto it and constructing radio maps for indoor and outdoornavigation This survey provides a comprehensive review of existing algorithms that estimate the location of a wireless Tx given aset of observations with the received signal strength indication Algorithms that require the observations to be location-tagged aresuitable for outdoor mapping or small-scale indoor mapping while algorithms that allow most observations to be unlocated tradeoff some accuracy to enable large-scale crowdsourcingThis article presents empirical evaluation of the algorithms using numericalsimulations and real-world Bluetooth Low Energy data
1 Introduction
Locating the wireless transmitters (Tx) in the network pro-vides mobile network operators with important and relevantinformation for a wide range of purposes including find-ing rogue and nonfunctional access points (AP) planningand operating the communication networks and estimatingthe radio frequency propagation properties of an area Txlocation determination is also used when constructing radiomaps for localization services
Every operator aims at providing good coverage sothat subscribers in most locations can access the networkCompetition between operators in providing the subscriberswith continuous and uninterrupted data usage prompt themto find unknown Txs that mainly belong to their competitorsBased on the knowledge of the deployed Tx locations oper-ators decide optimal places for installing new infrastructurewithin the area or steering the beam directions An unknownTx can be a WLAN (wireless local area network) AP withunlicensed spectrum or a femtocell AP whose spectrum islicensed to the operator These Txs may be managed byindividuals or groups or the operator itself
The operators offload users from their 3G or 4G cellsto adjacent small cells or indoor femtocells when the trafficbecomes heavy [1] Knowing Txsrsquo locations and coverageareas helps the operators to identify which cells are nearby
Locating unknown Txs helps the administrators securethe network when security loopholes are detected or whenthere are intruders that breach the area managed by theadministrators [2] Also when administrators update theirnetwork infrastructure within an authorized area a map ofexisting Tx locations helps to determine optimal locations fornew Txs
Moreover knowledge of Tx locations assists navigationin environments where GNSS (Global Navigation SatelliteSystem) navigation is not feasible such as indoors Indoornavigation requires detailed knowledge of the network topol-ogy of the building and unmanaged Txs can also be usedprovided that their locations are estimated In many indoorlocalization studies [3ndash5] it is assumed that Tx locations areknown a priori This assumption is usually only valid for Txsthat belong to the owner of the infrastructure
This survey provides the reader with a comprehensivereview on methods for locating wireless Txs using a set of
HindawiWireless Communications and Mobile ComputingVolume 2017 Article ID 2569645 12 pageshttpsdoiorg10115520172569645
2 Wireless Communications and Mobile Computing
Measurementcopy OpenStreetMap contributors
Tx
500m
(a)
MeasurementTx
10m
(b)
Figure 1 An outdoor cellular base station (a) and an indoor BLE Tx(b) with RSS measurement sets Red color indicates a strong RSS
measurements of the received signal strength (RSS) Most ofthe presented methods can be applied to different types ofwireless networks such as WLAN Bluetooth Low Energy(BLE) and cellular networks Figure 1 shows examples ofan outdoor cellular base station and an indoor BLE Tx andRSS measurement sets collected in the respective areas RSSinformation is available in reception reports of most wirelessnetworksrsquo receivers (Rx) without any special hardware orsoftware modifications [6]
This article categorizes themethods based on two criteriameasurement type and reference location requirement Themeasurement type can be the actual RSS from a Tx or justthe connectivity that is whether the Tx can be sensed or notSome of the reviewedmethods rely on locatedmeasurementsthat is they assume that every observation includes accurateinformation about the location of the measurement Somemethods assume that most of the observations are unlocatedlacking the location information The former are more accu-rate but are costly to implement while the latter are especiallysuitable for crowdsourcing We evaluate methods that uselocated measurements through numerical simulations andreal-world BLE data
The structure of this article is as follows firstly themethods are presented in detail connectivity-only methodsfirst in Section 2 then RSS based methods that use mea-surements with known locations in Section 3 and finallyRSS based methods that do not require all measurements tobe located in Section 4 Secondly experimental results arepresented in Section 5 along with a table that summarizes thebasic practical properties of each method Finally Section 6presents the conclusions
2 Connectivity Based Methods withLocated Observations
Connectivity based Tx localization algorithms assume thatthe closer one is to the Tx the higher is the probabilityof observing the Tx when listening with a Rx device Theobservations consist of tuples (p119894 ID119894) where p119894 is thereference position of the 119894thmeasurement and ID119894 is the set ofTx identifiers observed at the 119894th measurement Connectivityactually means that the RSS exceeds the receiverrsquos sensitivitythreshold [7] Thus connectivity based methods in fact relyon a very coarsely quantized RSS
The simplest connectivity basedTx localization algorithmis the (unweighted) centroid algorithm that was proposed forthe localization of awireless sensor networkrsquos nodes byBulusuet al [8] The centroid algorithm has also been proposed andtested at least in [9ndash13]The estimate of the location of the 119895thTx is the mean of the measurement locations
m119895 = 1 119894 119895 isin ID119894 119873sum119894=1 ⟦119895 isin ID119894⟧ sdot p119894 (1)
where 119860 is the number of elements in set 119860 119886 isin 119860 meansthat 119886 is an element of the set 119860 119873 is the total number ofmeasurements and ⟦ sdot ⟧ is the indicator function
⟦119909⟧ = 0 statement 119909 is false1 statement 119909 is true (2)
The centroid location is the solution of the optimizationproblem
argminm
119873sum119894=1
⟦119895 isin ID119894⟧ sdot 1003817100381710038171003817p119894 minusm10038171003817100381710038172 (3)
because (3) can be expressed as the weighted least squaresproblem
argminm
10038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817[[[[[[[radic1199081119868 0radic1199082119868
d
0 radic119908119873119868]]]]]]]([[[[[[[p1p2p119873
]]]]]]] minus[[[[[[[119868119868119868]]]]]]]m)
100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038172
(4)
where 119908119894 = ⟦119895 isin ID119894⟧ and 119868 is the identity matrix and(1) follows from (4) by the weighted linear least squaresformula Typically only the measurements where the 119895th Txhas been observed are used in the estimation of m119895 that isthe information of not observing the 119895th Tx in ameasurementis omitted In this sense the centroid also has a probabilisticinterpretation as the maximum likelihood solution to themeasurement model
P (119895 isin ID119894 | p119894m119895) prop 119890minus(12)(p119894minusm119895)T119878minus1(p119894minusm119895) (5)
Wireless Communications and Mobile Computing 3
x (m)
y (m
)
MeasurementTrue Tx location
CentroidRobust centroid
Figure 2 Robust centroid (] = 4) can outperform the conventionalcentroid algorithm when there are outlier measurements
where the positive-definite matrix 119878 is a constant that doesnot affect the solution and P denotes probability Koski et al[12] also estimate the coverage area parametermatrix 119878 for thepurpose of online mobile Rx positioning
The algorithm of Piche [14] can be considered a robus-tified version of the centroid algorithm This work considersthe assumption that there are outlier measurements with forexample erroneous reference position in the observation setby relying on the Studentrsquos 119905-distribution that gives a higherprobability for occasionally receiving the signal far from theTx
P (119895 isin ID119894 | p119894m119895)prop (1 + 1](p119894 minusm119895)T 119878minus1 (p119894 minusm119895))minus(]+2)2 (6)
where 119878 is a constant that does not affect the solution and ] isinR+ is a model parameter degrees of freedom and the closer ]is to zero the more robust the algorithm is Based on the Stu-dentrsquos 119905 model [14] use an EM (expectationndashmaximization)algorithm to solve the maximum a posteriori values of thecentroid and the coverage area matrix Figure 2 shows alocalization scenario where four out of the 50 measurementsare outliers In this scenario the robust centroidrsquos Tx locationestimates are significantly closer to the true location thanthe conventional centroid algorithmrsquos Notice that both [1214] mainly concentrate on online positioning and do notexplicitly assume that the Tx is actually located at m119895 theestimate rather models the center point of Txrsquos coverage area
The connectivity based methods are based on twoassumptions Txrsquos antenna is omnidirectional and measure-ments are collected uniformly in the whole reception area[8 10 19] As Bulusu et al [8] point out the performance ofthe centroid algorithm is highly dependent on the data Somestudies report [10 19] that the Tx position estimate will bebiased towards areas with the highest measurement densitiesA possible solution to this problem is to model the thorough-ness of the data collection in each location which would alsointroduce information on where the Tx is not hearable thisinformation has been used for mobile Rx localization [7]Another approach is gridding clustering the observationsin a regular grid so that each grid point represents all themeasurements in its vicinity which can partly mitigate the
problem of uneven measurement distribution Algorithmsfor detecting insufficient data collection and automaticallyproposing new measurement locations have been proposed[25]
The centroid method is straightforward to understandand implementThe basic centroid algorithm is computation-ally light and the robustified version is still computationallyfeasible for most purposes even though it is a constant factorheavier than the basic centroid Furthermore the centroidalgorithms have a small number of tunable configurationparameters which might be advantageous if there is littleprior information on the Tx locations and signal propagationmodels and there is no risk of overconfident RSS models
One important property of a method is whether the Txposition estimate can be updated when new observationsappear without needing to access all the old observations Forall the presented connectivity based methods updateabilitycan be achieved with a very low cost only the point estimateand the number of samples used need to be stored in thedatabase
3 RSS Based Methods withLocated Observations
This section reviews methods that estimate the Tx locationusing observations that consist of tuples (p119894 ID119894 r119894) where p119894is the reference location ID119894 is the list of Tx identifiers and r119894is the vector of corresponding RSSs
TheRSS is negatively correlatedwith the distance betweenthe Tx and Rx Attenuation of the signal strength (path lossPL) is due to both free space propagation loss governed bythe Friis equation and losses generated by various obstruc-tions in the environment [26 Ch 4] Accurate modeling ofthese obstructions is in most practical cases infeasible sosimplifying probabilistic models are commonly used Theconventional probabilistic model in both outdoor and indoorenvironments is the log-normal shadowingmodel [26 Ch 4]119903 (119889) = 119903(0) minus 10119899 log10 ( 119889119889(0)) + 119909120590 (7)
where 119903(119889) is the RSS in dBm (dB referenced to milliwatt) atdistance 119889 from the Tx 119889(0) is a reference distance typically1m 119903(0) fl 119903(119889(0)) is the RSS at the reference distance119899 is the PL exponent parameter and 119909120590 sim 119873(0 1205902) is anormally distributed shadowing term with variance 1205902 Theenvironment dependent PL parameters 119899 and 1205902 are usuallyestimated for a certain environment or for a certain Tx basedon data while the transmission power dependent parameter119903(0) can be assumed to be known based on the Tx properties[26 Ch 4] A typical assumption is that the shadowing term119909120590 is a statistically independent random variable for eachmeasurement while another possible approach is to assumespatially correlated shadowing see for example theGaussianprocess based algorithm [27] For localization purposes it isusually adequate to use distances in 2-dimensional Cartesiancoordinates in the localization of cellular base station towerfor example Txrsquos altitude affects the distance in the proximity
4 Wireless Communications and Mobile Computing
of the Tx but as most data typically comes from fartherdistances this effect can be neglected [16]
The signal shadowing consists of the so called small-scaleand large-scale shadowing components and typically the PLmodels model average of the both statistically as accurateanalysis of the multipath propagation patterns that causethe small-scale fading is not feasible in large systems Seefurther discussion in [28 Ch 72] Currently most wirelesscommunication networks transmit continuous waveformsand optimization for impulse signals is out of the scope ofthis article It should be noted that in case of most WLANsfor example the mapping from the reported RSS indicatorto the actual RSS in dBm is unknown This problem can becircumvented for example by using RSS ratios [29] or RSShistogram [30] The Rx can have one or multiple antennasand in the latter case the Rx device can either report all themeasurements separately or combine them into a single RSSmeasurement
31 Closed Form Solutions A commonly proposed closedform solution for Txrsquos position using RSS measurements isthe weighted centroid algorithm that was proposed for thelocalization of the wireless sensor nodes by Blumenthal etal [31] It has been proposed for WLAN Tx localization forexample by [9 11] In the weighted centroid approach theestimate of the 119895th Txrsquos location is
m119895 = 1sum119873119894=1 119908(119903119894119895) 119873sum119894=1119908(119903119894119895) sdot p119894 (8)
where 119908 is a weighting function that depends on the RSSand 119903119894119895 is the RSS of the signal transmitted by the 119895th Tx andreceived at the location p119894 Usually the weights are chosen sothat the stronger the RSS the greater the weightThe standardweighting methods are the distance based weighting [31]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot 10120582119903119894119895 (9)
and the RSS based weighting [11]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot (119903119894119895 minus 119903min)120582 (10)
In both the weighting methods 120582 isin R+ is a free parameterand 119903min is the signal detection threshold that is the lowestpossible RSS These weighting methods are compared forwireless node localization in [11] where it is found that thetwo methods have equal average performance The weightedcentroid location is the solution of the optimization problem
argminm119895
119873sum119894=1
119908(119903119894119895) 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 (11)
because (11) can be expressed as the weighted least squaresproblem (4) by setting 119908119894 = 119908(119903119894119895) and (8) follows from(4) by the linear least squares formula A correspondingprobabilistic interpretation is that the weighting functionvalue in the measurements where the 119895th Tx is observed
x (m)
y (m
)
minus80
minus70
minus60
minus50
minus40
minus30
RSS
(dBm
)
MeasurementTrue Tx location
CentroidWeighted c
Figure 3 When the Tx is not located in the middle of its coveragearea RSS based algorithms such as the distance-weighted centroidcan outperform the unweighted centroid
follows the exponential distribution whose scale parameteris inversely proportional to the squared TxndashRx distance Bythe change of variables formula for PDFs (probability densityfunctions) this gives119901 (119903119894119895 | 119895 isin ID119894 p119894m119895)= 10038171003817100381710038171003817p119894 minusm1198951003817100381710038171003817100381721199042 d119908
d119903119894119895 119890minus(p119894minusm11989521199042)119908(119903119894119895) (12)
where 119904 isin R+ is a constant that does not affect thesolution To obtain the objective function of (11) for themaximum likelihood solution the RxndashTx distance p119894 minusm119895is only to appear in the exponent so it is removed fromthe normalization constant by modeling the probability ofthe RSS exceeding the signal detection threshold 119903min to beinversely proportional to the squared RxndashTx distance
P (119895 isin ID119894 | p119894m119895) prop 10038171003817100381710038171003817p119894 minusm11989510038171003817100381710038171003817minus2 (13)
for distances exceeding a limitThe comments regarding the unweighted centroid are
applicable to the weighted version as well althoughmodelingof the RSS somewhat reduces the sensitivity to uneven datadensity Figure 3 shows a simulated example where Txrsquos actuallocation is not in themiddle of its coverage area In such a casetheweighted centroid algorithmoutperforms the unweightedcentroid due to the RSS measurement information
Another RSS based closed form solution is proposedby Koo and Cha [15] Earlier similar formulas have beenproposed for wireless sensor networks in [32] The sameformulas are used in [33] for distance measurement based
Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
Review ArticleA Survey on Wireless Transmitter Localization Using SignalStrength Measurements
Henri Nurminen1 Marzieh Dashti2 and Robert Picheacute1
1Tampere University of Technology Tampere Finland2Nokia Bell Labs Dublin Ireland
Correspondence should be addressed to Henri Nurminen henrinurminentutfi
Received 3 October 2016 Accepted 23 January 2017 Published 16 February 2017
Academic Editor Sunwoo Kim
Copyright copy 2017 Henri Nurminen et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Knowledge of deployed transmittersrsquo (Tx) locations in a wireless network improves many aspects of network managementOperators and building administrators are interested in locating unknown Txs for optimizing new Tx placement detecting andremoving unauthorized Txs selecting the nearest Tx to offload traffic onto it and constructing radio maps for indoor and outdoornavigation This survey provides a comprehensive review of existing algorithms that estimate the location of a wireless Tx given aset of observations with the received signal strength indication Algorithms that require the observations to be location-tagged aresuitable for outdoor mapping or small-scale indoor mapping while algorithms that allow most observations to be unlocated tradeoff some accuracy to enable large-scale crowdsourcingThis article presents empirical evaluation of the algorithms using numericalsimulations and real-world Bluetooth Low Energy data
1 Introduction
Locating the wireless transmitters (Tx) in the network pro-vides mobile network operators with important and relevantinformation for a wide range of purposes including find-ing rogue and nonfunctional access points (AP) planningand operating the communication networks and estimatingthe radio frequency propagation properties of an area Txlocation determination is also used when constructing radiomaps for localization services
Every operator aims at providing good coverage sothat subscribers in most locations can access the networkCompetition between operators in providing the subscriberswith continuous and uninterrupted data usage prompt themto find unknown Txs that mainly belong to their competitorsBased on the knowledge of the deployed Tx locations oper-ators decide optimal places for installing new infrastructurewithin the area or steering the beam directions An unknownTx can be a WLAN (wireless local area network) AP withunlicensed spectrum or a femtocell AP whose spectrum islicensed to the operator These Txs may be managed byindividuals or groups or the operator itself
The operators offload users from their 3G or 4G cellsto adjacent small cells or indoor femtocells when the trafficbecomes heavy [1] Knowing Txsrsquo locations and coverageareas helps the operators to identify which cells are nearby
Locating unknown Txs helps the administrators securethe network when security loopholes are detected or whenthere are intruders that breach the area managed by theadministrators [2] Also when administrators update theirnetwork infrastructure within an authorized area a map ofexisting Tx locations helps to determine optimal locations fornew Txs
Moreover knowledge of Tx locations assists navigationin environments where GNSS (Global Navigation SatelliteSystem) navigation is not feasible such as indoors Indoornavigation requires detailed knowledge of the network topol-ogy of the building and unmanaged Txs can also be usedprovided that their locations are estimated In many indoorlocalization studies [3ndash5] it is assumed that Tx locations areknown a priori This assumption is usually only valid for Txsthat belong to the owner of the infrastructure
This survey provides the reader with a comprehensivereview on methods for locating wireless Txs using a set of
HindawiWireless Communications and Mobile ComputingVolume 2017 Article ID 2569645 12 pageshttpsdoiorg10115520172569645
2 Wireless Communications and Mobile Computing
Measurementcopy OpenStreetMap contributors
Tx
500m
(a)
MeasurementTx
10m
(b)
Figure 1 An outdoor cellular base station (a) and an indoor BLE Tx(b) with RSS measurement sets Red color indicates a strong RSS
measurements of the received signal strength (RSS) Most ofthe presented methods can be applied to different types ofwireless networks such as WLAN Bluetooth Low Energy(BLE) and cellular networks Figure 1 shows examples ofan outdoor cellular base station and an indoor BLE Tx andRSS measurement sets collected in the respective areas RSSinformation is available in reception reports of most wirelessnetworksrsquo receivers (Rx) without any special hardware orsoftware modifications [6]
This article categorizes themethods based on two criteriameasurement type and reference location requirement Themeasurement type can be the actual RSS from a Tx or justthe connectivity that is whether the Tx can be sensed or notSome of the reviewedmethods rely on locatedmeasurementsthat is they assume that every observation includes accurateinformation about the location of the measurement Somemethods assume that most of the observations are unlocatedlacking the location information The former are more accu-rate but are costly to implement while the latter are especiallysuitable for crowdsourcing We evaluate methods that uselocated measurements through numerical simulations andreal-world BLE data
The structure of this article is as follows firstly themethods are presented in detail connectivity-only methodsfirst in Section 2 then RSS based methods that use mea-surements with known locations in Section 3 and finallyRSS based methods that do not require all measurements tobe located in Section 4 Secondly experimental results arepresented in Section 5 along with a table that summarizes thebasic practical properties of each method Finally Section 6presents the conclusions
2 Connectivity Based Methods withLocated Observations
Connectivity based Tx localization algorithms assume thatthe closer one is to the Tx the higher is the probabilityof observing the Tx when listening with a Rx device Theobservations consist of tuples (p119894 ID119894) where p119894 is thereference position of the 119894thmeasurement and ID119894 is the set ofTx identifiers observed at the 119894th measurement Connectivityactually means that the RSS exceeds the receiverrsquos sensitivitythreshold [7] Thus connectivity based methods in fact relyon a very coarsely quantized RSS
The simplest connectivity basedTx localization algorithmis the (unweighted) centroid algorithm that was proposed forthe localization of awireless sensor networkrsquos nodes byBulusuet al [8] The centroid algorithm has also been proposed andtested at least in [9ndash13]The estimate of the location of the 119895thTx is the mean of the measurement locations
m119895 = 1 119894 119895 isin ID119894 119873sum119894=1 ⟦119895 isin ID119894⟧ sdot p119894 (1)
where 119860 is the number of elements in set 119860 119886 isin 119860 meansthat 119886 is an element of the set 119860 119873 is the total number ofmeasurements and ⟦ sdot ⟧ is the indicator function
⟦119909⟧ = 0 statement 119909 is false1 statement 119909 is true (2)
The centroid location is the solution of the optimizationproblem
argminm
119873sum119894=1
⟦119895 isin ID119894⟧ sdot 1003817100381710038171003817p119894 minusm10038171003817100381710038172 (3)
because (3) can be expressed as the weighted least squaresproblem
argminm
10038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817[[[[[[[radic1199081119868 0radic1199082119868
d
0 radic119908119873119868]]]]]]]([[[[[[[p1p2p119873
]]]]]]] minus[[[[[[[119868119868119868]]]]]]]m)
100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038172
(4)
where 119908119894 = ⟦119895 isin ID119894⟧ and 119868 is the identity matrix and(1) follows from (4) by the weighted linear least squaresformula Typically only the measurements where the 119895th Txhas been observed are used in the estimation of m119895 that isthe information of not observing the 119895th Tx in ameasurementis omitted In this sense the centroid also has a probabilisticinterpretation as the maximum likelihood solution to themeasurement model
P (119895 isin ID119894 | p119894m119895) prop 119890minus(12)(p119894minusm119895)T119878minus1(p119894minusm119895) (5)
Wireless Communications and Mobile Computing 3
x (m)
y (m
)
MeasurementTrue Tx location
CentroidRobust centroid
Figure 2 Robust centroid (] = 4) can outperform the conventionalcentroid algorithm when there are outlier measurements
where the positive-definite matrix 119878 is a constant that doesnot affect the solution and P denotes probability Koski et al[12] also estimate the coverage area parametermatrix 119878 for thepurpose of online mobile Rx positioning
The algorithm of Piche [14] can be considered a robus-tified version of the centroid algorithm This work considersthe assumption that there are outlier measurements with forexample erroneous reference position in the observation setby relying on the Studentrsquos 119905-distribution that gives a higherprobability for occasionally receiving the signal far from theTx
P (119895 isin ID119894 | p119894m119895)prop (1 + 1](p119894 minusm119895)T 119878minus1 (p119894 minusm119895))minus(]+2)2 (6)
where 119878 is a constant that does not affect the solution and ] isinR+ is a model parameter degrees of freedom and the closer ]is to zero the more robust the algorithm is Based on the Stu-dentrsquos 119905 model [14] use an EM (expectationndashmaximization)algorithm to solve the maximum a posteriori values of thecentroid and the coverage area matrix Figure 2 shows alocalization scenario where four out of the 50 measurementsare outliers In this scenario the robust centroidrsquos Tx locationestimates are significantly closer to the true location thanthe conventional centroid algorithmrsquos Notice that both [1214] mainly concentrate on online positioning and do notexplicitly assume that the Tx is actually located at m119895 theestimate rather models the center point of Txrsquos coverage area
The connectivity based methods are based on twoassumptions Txrsquos antenna is omnidirectional and measure-ments are collected uniformly in the whole reception area[8 10 19] As Bulusu et al [8] point out the performance ofthe centroid algorithm is highly dependent on the data Somestudies report [10 19] that the Tx position estimate will bebiased towards areas with the highest measurement densitiesA possible solution to this problem is to model the thorough-ness of the data collection in each location which would alsointroduce information on where the Tx is not hearable thisinformation has been used for mobile Rx localization [7]Another approach is gridding clustering the observationsin a regular grid so that each grid point represents all themeasurements in its vicinity which can partly mitigate the
problem of uneven measurement distribution Algorithmsfor detecting insufficient data collection and automaticallyproposing new measurement locations have been proposed[25]
The centroid method is straightforward to understandand implementThe basic centroid algorithm is computation-ally light and the robustified version is still computationallyfeasible for most purposes even though it is a constant factorheavier than the basic centroid Furthermore the centroidalgorithms have a small number of tunable configurationparameters which might be advantageous if there is littleprior information on the Tx locations and signal propagationmodels and there is no risk of overconfident RSS models
One important property of a method is whether the Txposition estimate can be updated when new observationsappear without needing to access all the old observations Forall the presented connectivity based methods updateabilitycan be achieved with a very low cost only the point estimateand the number of samples used need to be stored in thedatabase
3 RSS Based Methods withLocated Observations
This section reviews methods that estimate the Tx locationusing observations that consist of tuples (p119894 ID119894 r119894) where p119894is the reference location ID119894 is the list of Tx identifiers and r119894is the vector of corresponding RSSs
TheRSS is negatively correlatedwith the distance betweenthe Tx and Rx Attenuation of the signal strength (path lossPL) is due to both free space propagation loss governed bythe Friis equation and losses generated by various obstruc-tions in the environment [26 Ch 4] Accurate modeling ofthese obstructions is in most practical cases infeasible sosimplifying probabilistic models are commonly used Theconventional probabilistic model in both outdoor and indoorenvironments is the log-normal shadowingmodel [26 Ch 4]119903 (119889) = 119903(0) minus 10119899 log10 ( 119889119889(0)) + 119909120590 (7)
where 119903(119889) is the RSS in dBm (dB referenced to milliwatt) atdistance 119889 from the Tx 119889(0) is a reference distance typically1m 119903(0) fl 119903(119889(0)) is the RSS at the reference distance119899 is the PL exponent parameter and 119909120590 sim 119873(0 1205902) is anormally distributed shadowing term with variance 1205902 Theenvironment dependent PL parameters 119899 and 1205902 are usuallyestimated for a certain environment or for a certain Tx basedon data while the transmission power dependent parameter119903(0) can be assumed to be known based on the Tx properties[26 Ch 4] A typical assumption is that the shadowing term119909120590 is a statistically independent random variable for eachmeasurement while another possible approach is to assumespatially correlated shadowing see for example theGaussianprocess based algorithm [27] For localization purposes it isusually adequate to use distances in 2-dimensional Cartesiancoordinates in the localization of cellular base station towerfor example Txrsquos altitude affects the distance in the proximity
4 Wireless Communications and Mobile Computing
of the Tx but as most data typically comes from fartherdistances this effect can be neglected [16]
The signal shadowing consists of the so called small-scaleand large-scale shadowing components and typically the PLmodels model average of the both statistically as accurateanalysis of the multipath propagation patterns that causethe small-scale fading is not feasible in large systems Seefurther discussion in [28 Ch 72] Currently most wirelesscommunication networks transmit continuous waveformsand optimization for impulse signals is out of the scope ofthis article It should be noted that in case of most WLANsfor example the mapping from the reported RSS indicatorto the actual RSS in dBm is unknown This problem can becircumvented for example by using RSS ratios [29] or RSShistogram [30] The Rx can have one or multiple antennasand in the latter case the Rx device can either report all themeasurements separately or combine them into a single RSSmeasurement
31 Closed Form Solutions A commonly proposed closedform solution for Txrsquos position using RSS measurements isthe weighted centroid algorithm that was proposed for thelocalization of the wireless sensor nodes by Blumenthal etal [31] It has been proposed for WLAN Tx localization forexample by [9 11] In the weighted centroid approach theestimate of the 119895th Txrsquos location is
m119895 = 1sum119873119894=1 119908(119903119894119895) 119873sum119894=1119908(119903119894119895) sdot p119894 (8)
where 119908 is a weighting function that depends on the RSSand 119903119894119895 is the RSS of the signal transmitted by the 119895th Tx andreceived at the location p119894 Usually the weights are chosen sothat the stronger the RSS the greater the weightThe standardweighting methods are the distance based weighting [31]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot 10120582119903119894119895 (9)
and the RSS based weighting [11]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot (119903119894119895 minus 119903min)120582 (10)
In both the weighting methods 120582 isin R+ is a free parameterand 119903min is the signal detection threshold that is the lowestpossible RSS These weighting methods are compared forwireless node localization in [11] where it is found that thetwo methods have equal average performance The weightedcentroid location is the solution of the optimization problem
argminm119895
119873sum119894=1
119908(119903119894119895) 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 (11)
because (11) can be expressed as the weighted least squaresproblem (4) by setting 119908119894 = 119908(119903119894119895) and (8) follows from(4) by the linear least squares formula A correspondingprobabilistic interpretation is that the weighting functionvalue in the measurements where the 119895th Tx is observed
x (m)
y (m
)
minus80
minus70
minus60
minus50
minus40
minus30
RSS
(dBm
)
MeasurementTrue Tx location
CentroidWeighted c
Figure 3 When the Tx is not located in the middle of its coveragearea RSS based algorithms such as the distance-weighted centroidcan outperform the unweighted centroid
follows the exponential distribution whose scale parameteris inversely proportional to the squared TxndashRx distance Bythe change of variables formula for PDFs (probability densityfunctions) this gives119901 (119903119894119895 | 119895 isin ID119894 p119894m119895)= 10038171003817100381710038171003817p119894 minusm1198951003817100381710038171003817100381721199042 d119908
d119903119894119895 119890minus(p119894minusm11989521199042)119908(119903119894119895) (12)
where 119904 isin R+ is a constant that does not affect thesolution To obtain the objective function of (11) for themaximum likelihood solution the RxndashTx distance p119894 minusm119895is only to appear in the exponent so it is removed fromthe normalization constant by modeling the probability ofthe RSS exceeding the signal detection threshold 119903min to beinversely proportional to the squared RxndashTx distance
P (119895 isin ID119894 | p119894m119895) prop 10038171003817100381710038171003817p119894 minusm11989510038171003817100381710038171003817minus2 (13)
for distances exceeding a limitThe comments regarding the unweighted centroid are
applicable to the weighted version as well althoughmodelingof the RSS somewhat reduces the sensitivity to uneven datadensity Figure 3 shows a simulated example where Txrsquos actuallocation is not in themiddle of its coverage area In such a casetheweighted centroid algorithmoutperforms the unweightedcentroid due to the RSS measurement information
Another RSS based closed form solution is proposedby Koo and Cha [15] Earlier similar formulas have beenproposed for wireless sensor networks in [32] The sameformulas are used in [33] for distance measurement based
Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Wireless Communications and Mobile Computing
Measurementcopy OpenStreetMap contributors
Tx
500m
(a)
MeasurementTx
10m
(b)
Figure 1 An outdoor cellular base station (a) and an indoor BLE Tx(b) with RSS measurement sets Red color indicates a strong RSS
measurements of the received signal strength (RSS) Most ofthe presented methods can be applied to different types ofwireless networks such as WLAN Bluetooth Low Energy(BLE) and cellular networks Figure 1 shows examples ofan outdoor cellular base station and an indoor BLE Tx andRSS measurement sets collected in the respective areas RSSinformation is available in reception reports of most wirelessnetworksrsquo receivers (Rx) without any special hardware orsoftware modifications [6]
This article categorizes themethods based on two criteriameasurement type and reference location requirement Themeasurement type can be the actual RSS from a Tx or justthe connectivity that is whether the Tx can be sensed or notSome of the reviewedmethods rely on locatedmeasurementsthat is they assume that every observation includes accurateinformation about the location of the measurement Somemethods assume that most of the observations are unlocatedlacking the location information The former are more accu-rate but are costly to implement while the latter are especiallysuitable for crowdsourcing We evaluate methods that uselocated measurements through numerical simulations andreal-world BLE data
The structure of this article is as follows firstly themethods are presented in detail connectivity-only methodsfirst in Section 2 then RSS based methods that use mea-surements with known locations in Section 3 and finallyRSS based methods that do not require all measurements tobe located in Section 4 Secondly experimental results arepresented in Section 5 along with a table that summarizes thebasic practical properties of each method Finally Section 6presents the conclusions
2 Connectivity Based Methods withLocated Observations
Connectivity based Tx localization algorithms assume thatthe closer one is to the Tx the higher is the probabilityof observing the Tx when listening with a Rx device Theobservations consist of tuples (p119894 ID119894) where p119894 is thereference position of the 119894thmeasurement and ID119894 is the set ofTx identifiers observed at the 119894th measurement Connectivityactually means that the RSS exceeds the receiverrsquos sensitivitythreshold [7] Thus connectivity based methods in fact relyon a very coarsely quantized RSS
The simplest connectivity basedTx localization algorithmis the (unweighted) centroid algorithm that was proposed forthe localization of awireless sensor networkrsquos nodes byBulusuet al [8] The centroid algorithm has also been proposed andtested at least in [9ndash13]The estimate of the location of the 119895thTx is the mean of the measurement locations
m119895 = 1 119894 119895 isin ID119894 119873sum119894=1 ⟦119895 isin ID119894⟧ sdot p119894 (1)
where 119860 is the number of elements in set 119860 119886 isin 119860 meansthat 119886 is an element of the set 119860 119873 is the total number ofmeasurements and ⟦ sdot ⟧ is the indicator function
⟦119909⟧ = 0 statement 119909 is false1 statement 119909 is true (2)
The centroid location is the solution of the optimizationproblem
argminm
119873sum119894=1
⟦119895 isin ID119894⟧ sdot 1003817100381710038171003817p119894 minusm10038171003817100381710038172 (3)
because (3) can be expressed as the weighted least squaresproblem
argminm
10038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817[[[[[[[radic1199081119868 0radic1199082119868
d
0 radic119908119873119868]]]]]]]([[[[[[[p1p2p119873
]]]]]]] minus[[[[[[[119868119868119868]]]]]]]m)
100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038171003817100381710038172
(4)
where 119908119894 = ⟦119895 isin ID119894⟧ and 119868 is the identity matrix and(1) follows from (4) by the weighted linear least squaresformula Typically only the measurements where the 119895th Txhas been observed are used in the estimation of m119895 that isthe information of not observing the 119895th Tx in ameasurementis omitted In this sense the centroid also has a probabilisticinterpretation as the maximum likelihood solution to themeasurement model
P (119895 isin ID119894 | p119894m119895) prop 119890minus(12)(p119894minusm119895)T119878minus1(p119894minusm119895) (5)
Wireless Communications and Mobile Computing 3
x (m)
y (m
)
MeasurementTrue Tx location
CentroidRobust centroid
Figure 2 Robust centroid (] = 4) can outperform the conventionalcentroid algorithm when there are outlier measurements
where the positive-definite matrix 119878 is a constant that doesnot affect the solution and P denotes probability Koski et al[12] also estimate the coverage area parametermatrix 119878 for thepurpose of online mobile Rx positioning
The algorithm of Piche [14] can be considered a robus-tified version of the centroid algorithm This work considersthe assumption that there are outlier measurements with forexample erroneous reference position in the observation setby relying on the Studentrsquos 119905-distribution that gives a higherprobability for occasionally receiving the signal far from theTx
P (119895 isin ID119894 | p119894m119895)prop (1 + 1](p119894 minusm119895)T 119878minus1 (p119894 minusm119895))minus(]+2)2 (6)
where 119878 is a constant that does not affect the solution and ] isinR+ is a model parameter degrees of freedom and the closer ]is to zero the more robust the algorithm is Based on the Stu-dentrsquos 119905 model [14] use an EM (expectationndashmaximization)algorithm to solve the maximum a posteriori values of thecentroid and the coverage area matrix Figure 2 shows alocalization scenario where four out of the 50 measurementsare outliers In this scenario the robust centroidrsquos Tx locationestimates are significantly closer to the true location thanthe conventional centroid algorithmrsquos Notice that both [1214] mainly concentrate on online positioning and do notexplicitly assume that the Tx is actually located at m119895 theestimate rather models the center point of Txrsquos coverage area
The connectivity based methods are based on twoassumptions Txrsquos antenna is omnidirectional and measure-ments are collected uniformly in the whole reception area[8 10 19] As Bulusu et al [8] point out the performance ofthe centroid algorithm is highly dependent on the data Somestudies report [10 19] that the Tx position estimate will bebiased towards areas with the highest measurement densitiesA possible solution to this problem is to model the thorough-ness of the data collection in each location which would alsointroduce information on where the Tx is not hearable thisinformation has been used for mobile Rx localization [7]Another approach is gridding clustering the observationsin a regular grid so that each grid point represents all themeasurements in its vicinity which can partly mitigate the
problem of uneven measurement distribution Algorithmsfor detecting insufficient data collection and automaticallyproposing new measurement locations have been proposed[25]
The centroid method is straightforward to understandand implementThe basic centroid algorithm is computation-ally light and the robustified version is still computationallyfeasible for most purposes even though it is a constant factorheavier than the basic centroid Furthermore the centroidalgorithms have a small number of tunable configurationparameters which might be advantageous if there is littleprior information on the Tx locations and signal propagationmodels and there is no risk of overconfident RSS models
One important property of a method is whether the Txposition estimate can be updated when new observationsappear without needing to access all the old observations Forall the presented connectivity based methods updateabilitycan be achieved with a very low cost only the point estimateand the number of samples used need to be stored in thedatabase
3 RSS Based Methods withLocated Observations
This section reviews methods that estimate the Tx locationusing observations that consist of tuples (p119894 ID119894 r119894) where p119894is the reference location ID119894 is the list of Tx identifiers and r119894is the vector of corresponding RSSs
TheRSS is negatively correlatedwith the distance betweenthe Tx and Rx Attenuation of the signal strength (path lossPL) is due to both free space propagation loss governed bythe Friis equation and losses generated by various obstruc-tions in the environment [26 Ch 4] Accurate modeling ofthese obstructions is in most practical cases infeasible sosimplifying probabilistic models are commonly used Theconventional probabilistic model in both outdoor and indoorenvironments is the log-normal shadowingmodel [26 Ch 4]119903 (119889) = 119903(0) minus 10119899 log10 ( 119889119889(0)) + 119909120590 (7)
where 119903(119889) is the RSS in dBm (dB referenced to milliwatt) atdistance 119889 from the Tx 119889(0) is a reference distance typically1m 119903(0) fl 119903(119889(0)) is the RSS at the reference distance119899 is the PL exponent parameter and 119909120590 sim 119873(0 1205902) is anormally distributed shadowing term with variance 1205902 Theenvironment dependent PL parameters 119899 and 1205902 are usuallyestimated for a certain environment or for a certain Tx basedon data while the transmission power dependent parameter119903(0) can be assumed to be known based on the Tx properties[26 Ch 4] A typical assumption is that the shadowing term119909120590 is a statistically independent random variable for eachmeasurement while another possible approach is to assumespatially correlated shadowing see for example theGaussianprocess based algorithm [27] For localization purposes it isusually adequate to use distances in 2-dimensional Cartesiancoordinates in the localization of cellular base station towerfor example Txrsquos altitude affects the distance in the proximity
4 Wireless Communications and Mobile Computing
of the Tx but as most data typically comes from fartherdistances this effect can be neglected [16]
The signal shadowing consists of the so called small-scaleand large-scale shadowing components and typically the PLmodels model average of the both statistically as accurateanalysis of the multipath propagation patterns that causethe small-scale fading is not feasible in large systems Seefurther discussion in [28 Ch 72] Currently most wirelesscommunication networks transmit continuous waveformsand optimization for impulse signals is out of the scope ofthis article It should be noted that in case of most WLANsfor example the mapping from the reported RSS indicatorto the actual RSS in dBm is unknown This problem can becircumvented for example by using RSS ratios [29] or RSShistogram [30] The Rx can have one or multiple antennasand in the latter case the Rx device can either report all themeasurements separately or combine them into a single RSSmeasurement
31 Closed Form Solutions A commonly proposed closedform solution for Txrsquos position using RSS measurements isthe weighted centroid algorithm that was proposed for thelocalization of the wireless sensor nodes by Blumenthal etal [31] It has been proposed for WLAN Tx localization forexample by [9 11] In the weighted centroid approach theestimate of the 119895th Txrsquos location is
m119895 = 1sum119873119894=1 119908(119903119894119895) 119873sum119894=1119908(119903119894119895) sdot p119894 (8)
where 119908 is a weighting function that depends on the RSSand 119903119894119895 is the RSS of the signal transmitted by the 119895th Tx andreceived at the location p119894 Usually the weights are chosen sothat the stronger the RSS the greater the weightThe standardweighting methods are the distance based weighting [31]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot 10120582119903119894119895 (9)
and the RSS based weighting [11]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot (119903119894119895 minus 119903min)120582 (10)
In both the weighting methods 120582 isin R+ is a free parameterand 119903min is the signal detection threshold that is the lowestpossible RSS These weighting methods are compared forwireless node localization in [11] where it is found that thetwo methods have equal average performance The weightedcentroid location is the solution of the optimization problem
argminm119895
119873sum119894=1
119908(119903119894119895) 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 (11)
because (11) can be expressed as the weighted least squaresproblem (4) by setting 119908119894 = 119908(119903119894119895) and (8) follows from(4) by the linear least squares formula A correspondingprobabilistic interpretation is that the weighting functionvalue in the measurements where the 119895th Tx is observed
x (m)
y (m
)
minus80
minus70
minus60
minus50
minus40
minus30
RSS
(dBm
)
MeasurementTrue Tx location
CentroidWeighted c
Figure 3 When the Tx is not located in the middle of its coveragearea RSS based algorithms such as the distance-weighted centroidcan outperform the unweighted centroid
follows the exponential distribution whose scale parameteris inversely proportional to the squared TxndashRx distance Bythe change of variables formula for PDFs (probability densityfunctions) this gives119901 (119903119894119895 | 119895 isin ID119894 p119894m119895)= 10038171003817100381710038171003817p119894 minusm1198951003817100381710038171003817100381721199042 d119908
d119903119894119895 119890minus(p119894minusm11989521199042)119908(119903119894119895) (12)
where 119904 isin R+ is a constant that does not affect thesolution To obtain the objective function of (11) for themaximum likelihood solution the RxndashTx distance p119894 minusm119895is only to appear in the exponent so it is removed fromthe normalization constant by modeling the probability ofthe RSS exceeding the signal detection threshold 119903min to beinversely proportional to the squared RxndashTx distance
P (119895 isin ID119894 | p119894m119895) prop 10038171003817100381710038171003817p119894 minusm11989510038171003817100381710038171003817minus2 (13)
for distances exceeding a limitThe comments regarding the unweighted centroid are
applicable to the weighted version as well althoughmodelingof the RSS somewhat reduces the sensitivity to uneven datadensity Figure 3 shows a simulated example where Txrsquos actuallocation is not in themiddle of its coverage area In such a casetheweighted centroid algorithmoutperforms the unweightedcentroid due to the RSS measurement information
Another RSS based closed form solution is proposedby Koo and Cha [15] Earlier similar formulas have beenproposed for wireless sensor networks in [32] The sameformulas are used in [33] for distance measurement based
Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 3
x (m)
y (m
)
MeasurementTrue Tx location
CentroidRobust centroid
Figure 2 Robust centroid (] = 4) can outperform the conventionalcentroid algorithm when there are outlier measurements
where the positive-definite matrix 119878 is a constant that doesnot affect the solution and P denotes probability Koski et al[12] also estimate the coverage area parametermatrix 119878 for thepurpose of online mobile Rx positioning
The algorithm of Piche [14] can be considered a robus-tified version of the centroid algorithm This work considersthe assumption that there are outlier measurements with forexample erroneous reference position in the observation setby relying on the Studentrsquos 119905-distribution that gives a higherprobability for occasionally receiving the signal far from theTx
P (119895 isin ID119894 | p119894m119895)prop (1 + 1](p119894 minusm119895)T 119878minus1 (p119894 minusm119895))minus(]+2)2 (6)
where 119878 is a constant that does not affect the solution and ] isinR+ is a model parameter degrees of freedom and the closer ]is to zero the more robust the algorithm is Based on the Stu-dentrsquos 119905 model [14] use an EM (expectationndashmaximization)algorithm to solve the maximum a posteriori values of thecentroid and the coverage area matrix Figure 2 shows alocalization scenario where four out of the 50 measurementsare outliers In this scenario the robust centroidrsquos Tx locationestimates are significantly closer to the true location thanthe conventional centroid algorithmrsquos Notice that both [1214] mainly concentrate on online positioning and do notexplicitly assume that the Tx is actually located at m119895 theestimate rather models the center point of Txrsquos coverage area
The connectivity based methods are based on twoassumptions Txrsquos antenna is omnidirectional and measure-ments are collected uniformly in the whole reception area[8 10 19] As Bulusu et al [8] point out the performance ofthe centroid algorithm is highly dependent on the data Somestudies report [10 19] that the Tx position estimate will bebiased towards areas with the highest measurement densitiesA possible solution to this problem is to model the thorough-ness of the data collection in each location which would alsointroduce information on where the Tx is not hearable thisinformation has been used for mobile Rx localization [7]Another approach is gridding clustering the observationsin a regular grid so that each grid point represents all themeasurements in its vicinity which can partly mitigate the
problem of uneven measurement distribution Algorithmsfor detecting insufficient data collection and automaticallyproposing new measurement locations have been proposed[25]
The centroid method is straightforward to understandand implementThe basic centroid algorithm is computation-ally light and the robustified version is still computationallyfeasible for most purposes even though it is a constant factorheavier than the basic centroid Furthermore the centroidalgorithms have a small number of tunable configurationparameters which might be advantageous if there is littleprior information on the Tx locations and signal propagationmodels and there is no risk of overconfident RSS models
One important property of a method is whether the Txposition estimate can be updated when new observationsappear without needing to access all the old observations Forall the presented connectivity based methods updateabilitycan be achieved with a very low cost only the point estimateand the number of samples used need to be stored in thedatabase
3 RSS Based Methods withLocated Observations
This section reviews methods that estimate the Tx locationusing observations that consist of tuples (p119894 ID119894 r119894) where p119894is the reference location ID119894 is the list of Tx identifiers and r119894is the vector of corresponding RSSs
TheRSS is negatively correlatedwith the distance betweenthe Tx and Rx Attenuation of the signal strength (path lossPL) is due to both free space propagation loss governed bythe Friis equation and losses generated by various obstruc-tions in the environment [26 Ch 4] Accurate modeling ofthese obstructions is in most practical cases infeasible sosimplifying probabilistic models are commonly used Theconventional probabilistic model in both outdoor and indoorenvironments is the log-normal shadowingmodel [26 Ch 4]119903 (119889) = 119903(0) minus 10119899 log10 ( 119889119889(0)) + 119909120590 (7)
where 119903(119889) is the RSS in dBm (dB referenced to milliwatt) atdistance 119889 from the Tx 119889(0) is a reference distance typically1m 119903(0) fl 119903(119889(0)) is the RSS at the reference distance119899 is the PL exponent parameter and 119909120590 sim 119873(0 1205902) is anormally distributed shadowing term with variance 1205902 Theenvironment dependent PL parameters 119899 and 1205902 are usuallyestimated for a certain environment or for a certain Tx basedon data while the transmission power dependent parameter119903(0) can be assumed to be known based on the Tx properties[26 Ch 4] A typical assumption is that the shadowing term119909120590 is a statistically independent random variable for eachmeasurement while another possible approach is to assumespatially correlated shadowing see for example theGaussianprocess based algorithm [27] For localization purposes it isusually adequate to use distances in 2-dimensional Cartesiancoordinates in the localization of cellular base station towerfor example Txrsquos altitude affects the distance in the proximity
4 Wireless Communications and Mobile Computing
of the Tx but as most data typically comes from fartherdistances this effect can be neglected [16]
The signal shadowing consists of the so called small-scaleand large-scale shadowing components and typically the PLmodels model average of the both statistically as accurateanalysis of the multipath propagation patterns that causethe small-scale fading is not feasible in large systems Seefurther discussion in [28 Ch 72] Currently most wirelesscommunication networks transmit continuous waveformsand optimization for impulse signals is out of the scope ofthis article It should be noted that in case of most WLANsfor example the mapping from the reported RSS indicatorto the actual RSS in dBm is unknown This problem can becircumvented for example by using RSS ratios [29] or RSShistogram [30] The Rx can have one or multiple antennasand in the latter case the Rx device can either report all themeasurements separately or combine them into a single RSSmeasurement
31 Closed Form Solutions A commonly proposed closedform solution for Txrsquos position using RSS measurements isthe weighted centroid algorithm that was proposed for thelocalization of the wireless sensor nodes by Blumenthal etal [31] It has been proposed for WLAN Tx localization forexample by [9 11] In the weighted centroid approach theestimate of the 119895th Txrsquos location is
m119895 = 1sum119873119894=1 119908(119903119894119895) 119873sum119894=1119908(119903119894119895) sdot p119894 (8)
where 119908 is a weighting function that depends on the RSSand 119903119894119895 is the RSS of the signal transmitted by the 119895th Tx andreceived at the location p119894 Usually the weights are chosen sothat the stronger the RSS the greater the weightThe standardweighting methods are the distance based weighting [31]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot 10120582119903119894119895 (9)
and the RSS based weighting [11]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot (119903119894119895 minus 119903min)120582 (10)
In both the weighting methods 120582 isin R+ is a free parameterand 119903min is the signal detection threshold that is the lowestpossible RSS These weighting methods are compared forwireless node localization in [11] where it is found that thetwo methods have equal average performance The weightedcentroid location is the solution of the optimization problem
argminm119895
119873sum119894=1
119908(119903119894119895) 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 (11)
because (11) can be expressed as the weighted least squaresproblem (4) by setting 119908119894 = 119908(119903119894119895) and (8) follows from(4) by the linear least squares formula A correspondingprobabilistic interpretation is that the weighting functionvalue in the measurements where the 119895th Tx is observed
x (m)
y (m
)
minus80
minus70
minus60
minus50
minus40
minus30
RSS
(dBm
)
MeasurementTrue Tx location
CentroidWeighted c
Figure 3 When the Tx is not located in the middle of its coveragearea RSS based algorithms such as the distance-weighted centroidcan outperform the unweighted centroid
follows the exponential distribution whose scale parameteris inversely proportional to the squared TxndashRx distance Bythe change of variables formula for PDFs (probability densityfunctions) this gives119901 (119903119894119895 | 119895 isin ID119894 p119894m119895)= 10038171003817100381710038171003817p119894 minusm1198951003817100381710038171003817100381721199042 d119908
d119903119894119895 119890minus(p119894minusm11989521199042)119908(119903119894119895) (12)
where 119904 isin R+ is a constant that does not affect thesolution To obtain the objective function of (11) for themaximum likelihood solution the RxndashTx distance p119894 minusm119895is only to appear in the exponent so it is removed fromthe normalization constant by modeling the probability ofthe RSS exceeding the signal detection threshold 119903min to beinversely proportional to the squared RxndashTx distance
P (119895 isin ID119894 | p119894m119895) prop 10038171003817100381710038171003817p119894 minusm11989510038171003817100381710038171003817minus2 (13)
for distances exceeding a limitThe comments regarding the unweighted centroid are
applicable to the weighted version as well althoughmodelingof the RSS somewhat reduces the sensitivity to uneven datadensity Figure 3 shows a simulated example where Txrsquos actuallocation is not in themiddle of its coverage area In such a casetheweighted centroid algorithmoutperforms the unweightedcentroid due to the RSS measurement information
Another RSS based closed form solution is proposedby Koo and Cha [15] Earlier similar formulas have beenproposed for wireless sensor networks in [32] The sameformulas are used in [33] for distance measurement based
Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Wireless Communications and Mobile Computing
of the Tx but as most data typically comes from fartherdistances this effect can be neglected [16]
The signal shadowing consists of the so called small-scaleand large-scale shadowing components and typically the PLmodels model average of the both statistically as accurateanalysis of the multipath propagation patterns that causethe small-scale fading is not feasible in large systems Seefurther discussion in [28 Ch 72] Currently most wirelesscommunication networks transmit continuous waveformsand optimization for impulse signals is out of the scope ofthis article It should be noted that in case of most WLANsfor example the mapping from the reported RSS indicatorto the actual RSS in dBm is unknown This problem can becircumvented for example by using RSS ratios [29] or RSShistogram [30] The Rx can have one or multiple antennasand in the latter case the Rx device can either report all themeasurements separately or combine them into a single RSSmeasurement
31 Closed Form Solutions A commonly proposed closedform solution for Txrsquos position using RSS measurements isthe weighted centroid algorithm that was proposed for thelocalization of the wireless sensor nodes by Blumenthal etal [31] It has been proposed for WLAN Tx localization forexample by [9 11] In the weighted centroid approach theestimate of the 119895th Txrsquos location is
m119895 = 1sum119873119894=1 119908(119903119894119895) 119873sum119894=1119908(119903119894119895) sdot p119894 (8)
where 119908 is a weighting function that depends on the RSSand 119903119894119895 is the RSS of the signal transmitted by the 119895th Tx andreceived at the location p119894 Usually the weights are chosen sothat the stronger the RSS the greater the weightThe standardweighting methods are the distance based weighting [31]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot 10120582119903119894119895 (9)
and the RSS based weighting [11]119908(119903119894119895) = ⟦119895 isin ID119894⟧ sdot (119903119894119895 minus 119903min)120582 (10)
In both the weighting methods 120582 isin R+ is a free parameterand 119903min is the signal detection threshold that is the lowestpossible RSS These weighting methods are compared forwireless node localization in [11] where it is found that thetwo methods have equal average performance The weightedcentroid location is the solution of the optimization problem
argminm119895
119873sum119894=1
119908(119903119894119895) 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 (11)
because (11) can be expressed as the weighted least squaresproblem (4) by setting 119908119894 = 119908(119903119894119895) and (8) follows from(4) by the linear least squares formula A correspondingprobabilistic interpretation is that the weighting functionvalue in the measurements where the 119895th Tx is observed
x (m)
y (m
)
minus80
minus70
minus60
minus50
minus40
minus30
RSS
(dBm
)
MeasurementTrue Tx location
CentroidWeighted c
Figure 3 When the Tx is not located in the middle of its coveragearea RSS based algorithms such as the distance-weighted centroidcan outperform the unweighted centroid
follows the exponential distribution whose scale parameteris inversely proportional to the squared TxndashRx distance Bythe change of variables formula for PDFs (probability densityfunctions) this gives119901 (119903119894119895 | 119895 isin ID119894 p119894m119895)= 10038171003817100381710038171003817p119894 minusm1198951003817100381710038171003817100381721199042 d119908
d119903119894119895 119890minus(p119894minusm11989521199042)119908(119903119894119895) (12)
where 119904 isin R+ is a constant that does not affect thesolution To obtain the objective function of (11) for themaximum likelihood solution the RxndashTx distance p119894 minusm119895is only to appear in the exponent so it is removed fromthe normalization constant by modeling the probability ofthe RSS exceeding the signal detection threshold 119903min to beinversely proportional to the squared RxndashTx distance
P (119895 isin ID119894 | p119894m119895) prop 10038171003817100381710038171003817p119894 minusm11989510038171003817100381710038171003817minus2 (13)
for distances exceeding a limitThe comments regarding the unweighted centroid are
applicable to the weighted version as well althoughmodelingof the RSS somewhat reduces the sensitivity to uneven datadensity Figure 3 shows a simulated example where Txrsquos actuallocation is not in themiddle of its coverage area In such a casetheweighted centroid algorithmoutperforms the unweightedcentroid due to the RSS measurement information
Another RSS based closed form solution is proposedby Koo and Cha [15] Earlier similar formulas have beenproposed for wireless sensor networks in [32] The sameformulas are used in [33] for distance measurement based
Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 5
wireless transmitter positioning without the estimation ofthe signal propagation parameter Instead of the log-normalshadowing model (7) [15] use a different PL model119901 (119903119894119895 | p119894m119895 119886119895 119887119895)= 119873(119903119894119895 119886119895 minus 119887119895 10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 1198872119895 1205902) (14)
where 119873(x120583 Σ) is the PDF of the (possibly multivariate)normal distribution with mean 120583 and covariance matrix Σevaluated at x and 119886119895 and 119887119895 are the parameters of this non-logarithmic PL model that are not directly related to the PLparameters 119903(0) and 119899 in (7) (The notation is simplified from[15])Thus the distribution of two conditionally independentRSSsrsquo difference is119901 (119903119896119895 minus 119903119894119895 | p119896 p119894m119895 119886119895 119887119895)= 119873(119903119896119895 minus 119903119894119895 119887119895 (10038171003817100381710038171003817p119894 minusm119895100381710038171003817100381710038172 minus 10038171003817100381710038171003817p119896 minusm119895100381710038171003817100381710038172) 21198872119895 1205902)= 11003816100381610038161003816100381611988711989510038161003816100381610038161003816119873(119910119896119894 119867119895119896119894 [[[
m1198951119887119895 ]]] 21205902)(15)
where 119910119896119894 = 1003817100381710038171003817p11989410038171003817100381710038172 minus 1003817100381710038171003817p11989610038171003817100381710038172 119867119895119896119894 = [2 (p119894 minus p119896)T 119903119896119895 minus 119903119894119895] (16)
Given the flat prior for the Tx positionm119895 and the improperprior 119901(1119887119895) prop |1119887119895|minus1 the posterior of (m119895 1119887119895) is thusgiven by the standard linear least squares (LLS) formulas
119901(m119895 1119887119895 | 1199031119873 p1119873)= 119873([[[
m1198951119887119895 ]]] (119867T119895 119867119895)minus1119867T
119895 119910119895 21205902 (119867T119895 119867119895)minus1) (17)
where
119867119895 = [[[[[[[[1198671198951211986711989534119867119895(119873minus1)119873]]]]]]]]
119910119895 = [[[[[[[1199101211991034119910(119873minus1)119873]]]]]]]
(18)
In this formula each RSS measurement is used only onceto avoid correlations between RSS differences A strength ofthis LLS method is the existence of closed form formulas themethod thus has rather low and predictable computationalcost and convergence is not an issue Addition of priorinformation on the Tx location is also straightforwardHowever if the actual RSS follows the log-normal shadowingmodel (7) the approximation (14) can be crude
32 Iterative Methods Maximizing the likelihood of the Txposition and possibly some model parameters 120579 using themodel (7) leads to the nonlinear least squares (LS) problem
(m119895 ) = argmin(m120579)
119873sum119894=1
(ℎ119894 (m 120579))2 (19)
whereℎ119894 (m 120579) = 119903119894119895 minus 119903(0) (120579) + 10119899 (120579) log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (20)
is the model function of one measurementThis optimization problem can be solved using various
nonlinear LS methods that are typically iterative algorithms[34] The general form of the nonlinear LS problem is
argminx f (x)2 (21)
where f is a knownnonlinear function and sdot is the Euclideannorm Many solution methods are based on differentiationeither on the first order derivative (gradient Jacobian) suchas the steepest descent and GaussndashNewton (GN) methods oron the second-order derivative (Hessian matrix) such as theNewtonmethod [34] To the authorsrsquo knowledge the second-order information has not been used in problem (19) becauseof the difficulty of analytical differentiation Given an initialpoint x0 a GN iteration is
x119896+1 = x119896 minus (119865T119896 119865119896)minus1 119865T119896 f (x119896) (22)
where 119865119896 is the Jacobian matrix of the function f evaluated inx119896
The GN method has been applied to problem (19) in[16 17] for example In this case the model function f is thefunction h whose 119894th element is[h (m 119903(0) 119899)]119894 = 119903119894119895 minus 119903(0) + 10119899 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 (23)
and the 119894th row of its Jacobian matrix119867 is[119867 (m 119903(0) 119899)]119894= [minus 10ln10119899(p119894 minusm)T1003817100381710038171003817p119894 minusm10038171003817100381710038172 minus1 10 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817] (24)
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
6 Wireless Communications and Mobile Computing
minus80
minus75
minus70
minus65
RSS
(dBm
)
MeasurementTrueCentroid
Weighted cGN
x (m)
y (m
)
Figure 4 Centroid algorithms can suffer from biased samplingmore than PL model based nonlinear methods such as the GNThecolored dots are measurement locations in a 2-dimensional map Asimulated example
If the parameters 119903(0) and 119899 are known for a certain environ-ment the corresponding columns can be left out from thematrix (24)TheGN algorithm can sometimes diverge A lessdivergence-prone GN version is the LevenbergndashMarquardt(LM) algorithm used for Tx localization in [18] Alternativelythe divergence can be addressed by using an additionalline search algorithm that ensures decrease of the objectivefunction value as in [16]
As pointed out in [35] if the posterior covariance matrixis approximated by the covariance matrix of the linearizedmodel the estimate can be updated when newmeasurementsare obtained Including a Gaussian prior distribution119873(120583 Σ)for x keeps the problem as a nonlinear LS problem
argminx [(x minus 120583)T Σminus1 (x minus 120583) + h (x)T 119877minus1h (x)] (25)
for which a GN iteration is [35]
x119896+1 = x119896 minus (Σminus1 + 119867T119896 119877minus1119867119896)minus1times (Σminus1 (x119896 minus 120583) + 119867T
119896 119877minus1h (x119896)) (26)
where 119877 = 1205902 sdot 119868 is the measurement noise covariance matrixand 1205902 is the shadowing variance in (7)This iteration enablesapproximative updating of the estimate without storing theold observations by using the covariancematrix update (Σminus1+119867T119896 119877minus1119867119896)minus1 Notice that if there is enough knowledge of the
PL parameters the Tx location estimate can be outside theobservation area as illustrated by Figure 4
The GN converges to a local minimum so the choice ofthe initial point x0 is important Proposed choices of x0 in Txlocalization are the location of the strongest observation [16]the centroid of all observations [17] or the result of a grid-type algorithm which is discussed in Section 33 A drawbackof GN and LM is that if there are several separate areas ofstrong measurements the computed Tx location estimatedepends strongly on the initial point so that different strongareas are not compared
Due to the assumption of normally distributed shadow-ing the GN algorithm can be sensitive to outlier measure-ments where the RSS differs significantly from the valuepredicted by the PL model Outlier removal procedures fortackling this issue have been proposed at least in [36]
33 Monte Carlo and Grid Methods This section discussesmethods that are based on explicit evaluation of the Txlocations PDF at several points of the location space Ingrid methods prespecified evaluation points are used whileMonte Carlo (MC) algorithms are based on pseudorandomevaluation points
Importance sampling is a basic form of MC samplingKim et al [10] use a method where the MC samples of thelocation of one Tx m(119896)119895 are generated from a prespecifiedprior distribution and then given weights 119908(119896)119895 based on thetraining measurements and known PL parameters Kim et aldo not explain their weightingmethod but the formula basedon the model (7) is119908(119896)119895 = 119890minus(121205902) sum119873119894=1(119903119894119895minus119903(0)+10119899 log10p119894minusm(119896)119895 )2 (27)
The MC estimate of the posterior mean is then the weightedaverage of the samples
m119895 = 1sum119873119901119896=1 119908(119896)119895 119873119901sum119896=1119908(119896)119895 m(119896)119895 (28)
where 119873119901 is the number of MC samples This method canalso be called a particle filter with the static state modelas in [10] since the weights can be updated recursively Adrawback is that importance sampling suffers from sampleimpoverishment in static state estimation [37 Ch 34] allweight will over time concentrate to a few samples andthere will be little variability because of lack of dynamicsThis problem can to some extent be overcome by usingresampling techniques such as resample-move algorithm orMarkov Chain Monte Carlo techniques [37 Ch 34]
For some models a solution to sample impoverishmentis Rao-Blackwellization [37 Ch 34] that is proposed forsimultaneous mobile Rx and static Tx localization by Brunoand Robertson [21] They do online Tx localization using aRao-Blackwellized particle filter (RBPF) so that the trainingmeasurementsrsquo locations are obtained by inertial positioningThus the distribution of the Rx locations is obtained by MCsampling The distribution of each Tx location is approxi-mated by a Gaussian mixture for each MC sample and eachvalue of the PL parameter 119903(0) The PL exponent 119899 is assumedto be known This gives a recursive algorithm for jointestimation of the Rx andTx locationsThis solution is suitablefor cases where the locations of the training measurementsare imprecise but form a time-series that can be filtered
Han et al [19] propose a grid method where a plane119903 = 119891(p) is fitted to the 3-dimensional positionndashRSS space(p 119903119895) for each grid point The direction of gradient of 119891 is
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
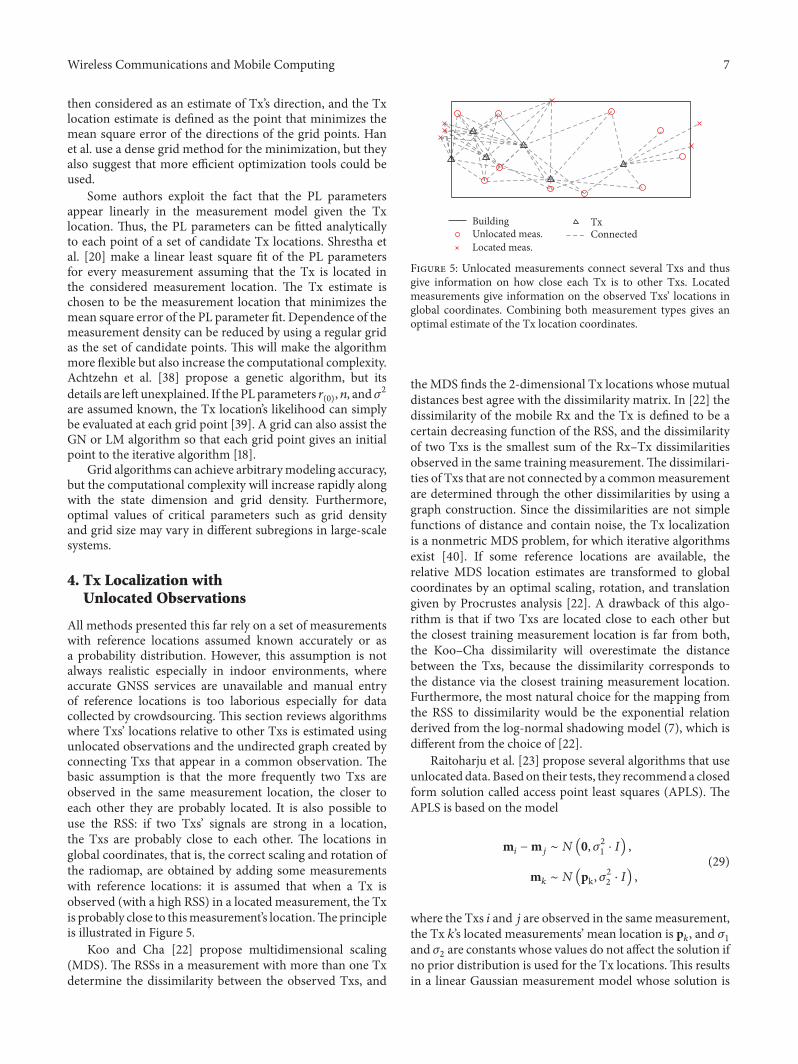
Wireless Communications and Mobile Computing 7
then considered as an estimate of Txrsquos direction and the Txlocation estimate is defined as the point that minimizes themean square error of the directions of the grid points Hanet al use a dense grid method for the minimization but theyalso suggest that more efficient optimization tools could beused
Some authors exploit the fact that the PL parametersappear linearly in the measurement model given the Txlocation Thus the PL parameters can be fitted analyticallyto each point of a set of candidate Tx locations Shrestha etal [20] make a linear least square fit of the PL parametersfor every measurement assuming that the Tx is located inthe considered measurement location The Tx estimate ischosen to be the measurement location that minimizes themean square error of the PL parameter fit Dependence of themeasurement density can be reduced by using a regular gridas the set of candidate points This will make the algorithmmore flexible but also increase the computational complexityAchtzehn et al [38] propose a genetic algorithm but itsdetails are left unexplained If the PL parameters 119903(0) 119899 and1205902are assumed known the Tx locationrsquos likelihood can simplybe evaluated at each grid point [39] A grid can also assist theGN or LM algorithm so that each grid point gives an initialpoint to the iterative algorithm [18]
Grid algorithms can achieve arbitrarymodeling accuracybut the computational complexity will increase rapidly alongwith the state dimension and grid density Furthermoreoptimal values of critical parameters such as grid densityand grid size may vary in different subregions in large-scalesystems
4 Tx Localization withUnlocated Observations
All methods presented this far rely on a set of measurementswith reference locations assumed known accurately or asa probability distribution However this assumption is notalways realistic especially in indoor environments whereaccurate GNSS services are unavailable and manual entryof reference locations is too laborious especially for datacollected by crowdsourcing This section reviews algorithmswhere Txsrsquo locations relative to other Txs is estimated usingunlocated observations and the undirected graph created byconnecting Txs that appear in a common observation Thebasic assumption is that the more frequently two Txs areobserved in the same measurement location the closer toeach other they are probably located It is also possible touse the RSS if two Txsrsquo signals are strong in a locationthe Txs are probably close to each other The locations inglobal coordinates that is the correct scaling and rotation ofthe radiomap are obtained by adding some measurementswith reference locations it is assumed that when a Tx isobserved (with a high RSS) in a located measurement the Txis probably close to thismeasurementrsquos locationTheprincipleis illustrated in Figure 5
Koo and Cha [22] propose multidimensional scaling(MDS) The RSSs in a measurement with more than one Txdetermine the dissimilarity between the observed Txs and
BuildingUnlocated measLocated meas
TxConnected
Figure 5 Unlocated measurements connect several Txs and thusgive information on how close each Tx is to other Txs Locatedmeasurements give information on the observed Txsrsquo locations inglobal coordinates Combining both measurement types gives anoptimal estimate of the Tx location coordinates
the MDS finds the 2-dimensional Tx locations whose mutualdistances best agree with the dissimilarity matrix In [22] thedissimilarity of the mobile Rx and the Tx is defined to be acertain decreasing function of the RSS and the dissimilarityof two Txs is the smallest sum of the RxndashTx dissimilaritiesobserved in the same training measurementThe dissimilari-ties of Txs that are not connected by a commonmeasurementare determined through the other dissimilarities by using agraph construction Since the dissimilarities are not simplefunctions of distance and contain noise the Tx localizationis a nonmetric MDS problem for which iterative algorithmsexist [40] If some reference locations are available therelative MDS location estimates are transformed to globalcoordinates by an optimal scaling rotation and translationgiven by Procrustes analysis [22] A drawback of this algo-rithm is that if two Txs are located close to each other butthe closest training measurement location is far from boththe KoondashCha dissimilarity will overestimate the distancebetween the Txs because the dissimilarity corresponds tothe distance via the closest training measurement locationFurthermore the most natural choice for the mapping fromthe RSS to dissimilarity would be the exponential relationderived from the log-normal shadowing model (7) which isdifferent from the choice of [22]
Raitoharju et al [23] propose several algorithms that useunlocated data Based on their tests they recommend a closedform solution called access point least squares (APLS) TheAPLS is based on the model
m119894 minusm119895 sim 119873(0 12059021 sdot 119868) m119896 sim 119873(pk 12059022 sdot 119868) (29)
where the Txs 119894 and 119895 are observed in the samemeasurementthe Tx 119896rsquos located measurementsrsquo mean location is p119896 and 1205901and 1205902 are constants whose values do not affect the solution ifno prior distribution is used for the Tx locations This resultsin a linear Gaussian measurement model whose solution is
8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Wireless Communications and Mobile Computing
the standard linear least squares formula Raitoharju et al[23] also propose that the accuracy can be improved with thecost of increased running time by applying a GaussndashNewtonmethod (22) where the log-normal shadowing model withfixed PL parameter values is used so that both Tx locationsand mobile Rx locations are unknown The GN algorithmis more accurate than the APLS due to modeling of RSSbut multimodality of the posterior distribution can causeconvergence to nonglobal extrema [24]
Chintalapudi et al [24] present a method that relies ona genetic algorithm for finding initial points for iterativeoptimization methods In the first phase all initial points aregenerated randomly genetic algorithms are thusMonteCarloalgorithms The initial points are then treated in a mannerthat depends on the objective function value (fitness) of thelocal maxima given by the iterative optimization method foreach initial point The initial points with high fitness areretained while the initial points with low fitness are replacedby generating new values added random noise or mixedby random convex combinations This cycle is iterated untilthe solution stops improving Chintalapudi et al estimatethe mobile user location p119894 the Tx location m119895 and thePL parameters 119903(0) and 119899 jointly for each 119894th measurementand 119895th Tx Chintalapudi et al use a fitness function thatis based on the mean absolute error but the standard leastsquares approach of (19) can also be used for more standardmodeling and a wider range of optimization methods Thegenetic algorithm is capable of finding the global maximumwith amuch higher probability than a single gradient descentalgorithm The disadvantage is the increased computationalburden Chintalapudi et al discuss criteria to select a subsetof Txs and training data so that computational requirementsare somewhat reduced without losing accuracy significantly
5 Tests
51 Simulations We implemented 11 Rx localizationmethodswith Matlab We simulated 100 Txs with 250 measure-ments for each We generated the measurement points frombivariate normal distributions whose covariance matriceswere generated separately for each Tx from the Wishartdistribution with three degrees of freedom119882((20m)2 sdot 119868 3)Each measurement point was then assigned a RSS valuegenerated from the distribution119903119894 sim 119873(minus70 minus 10 sdot 2 log10 1003817100381710038171003817p119894 minusm1003817100381710038171003817 62) (30)
that is the used PL parameters are 119903(0) = minus70 119899 = 2and 120590 = 6 which are approximately in line with the values119903(0) = minus7039 119899 = 132 and 120590 = 585 given in [41] EachTx localization method that uses measurements with knownreference locations is then applied to each measurement set
The parameter values used in the tests were the followingIn the robust centroid algorithm the number of EM iterationswas five and the number of degrees of freedom ] = 4In the weighted centroid we set 119903min = minus120 dBm Weoptimized the parameter 120582 with a Monte Carlo simulation
0
1
2
3
Med
ian
erro
r (m
)
Wcentroid-distWcentroid-RSS
10minus2 10minus1 100 101 102
120582
Figure 6 Optimization of the weighted centroidrsquos parameter 120582for distance based (black) and RSS based (grey) weighted centroidalgorithms The values chosen for the further tests were 007 fordistance based and 5 for RSS based algorithm
using 10000 replications and the median Tx positioningerror as a function of 120582 is shown in Figure 6 Based onthis we set the parameter value to 007 for distance basedand 5 for RSS based weighted centroid The GN iterationwas terminated when change in the Tx location betweentwo successive iterations was less than 1mm or after 1000iterations The importance sampling used 5000 Monte Carlosamples In the RSS gradientmethod the gradients were fittedfor each point of the regular grid with 1-meter spacing so thatthe grid squares that did not have any measurements wereremoved The window size of the gradient fitting was chosenaccording to the advice given in [19] the window size wasincreased until at least 30 of the grid points had at leastthree measurements to fit the gradient The grid-point-wisePL parameter fitting method was based on a regular gridusing 075-meter spacing and the square around the strongestRSS measurement with side length 60 m
The Tx localization error distributions are illustrated inFigure 7 In these boxplots the asterisks show the maximumandminimum error of themethod and the box levels are 525 50 75 and 95 error quantiles In the left subplotthe measurement locations are generated from the bivariatenormal distributions In the right subplot the measurementswhose east coordinates are greater than those of the Tx areremoved this test is done to study the robustness of themethods to training data distributions that are not symmetricwith respect to the Tx location Some of the algorithms canbe given prior information on the PL parameters Note thatthis kind of prior information is not always available in real-world scenarios The red boxes in Figure 7 show the errordistributions when the PL parameters are given the prior119903(0) sim 119873(minus70 102) (31a)119899 sim 119873(2 052) (31b)
With the importance sampling method estimation withoutprior means using a prior with a large variance
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
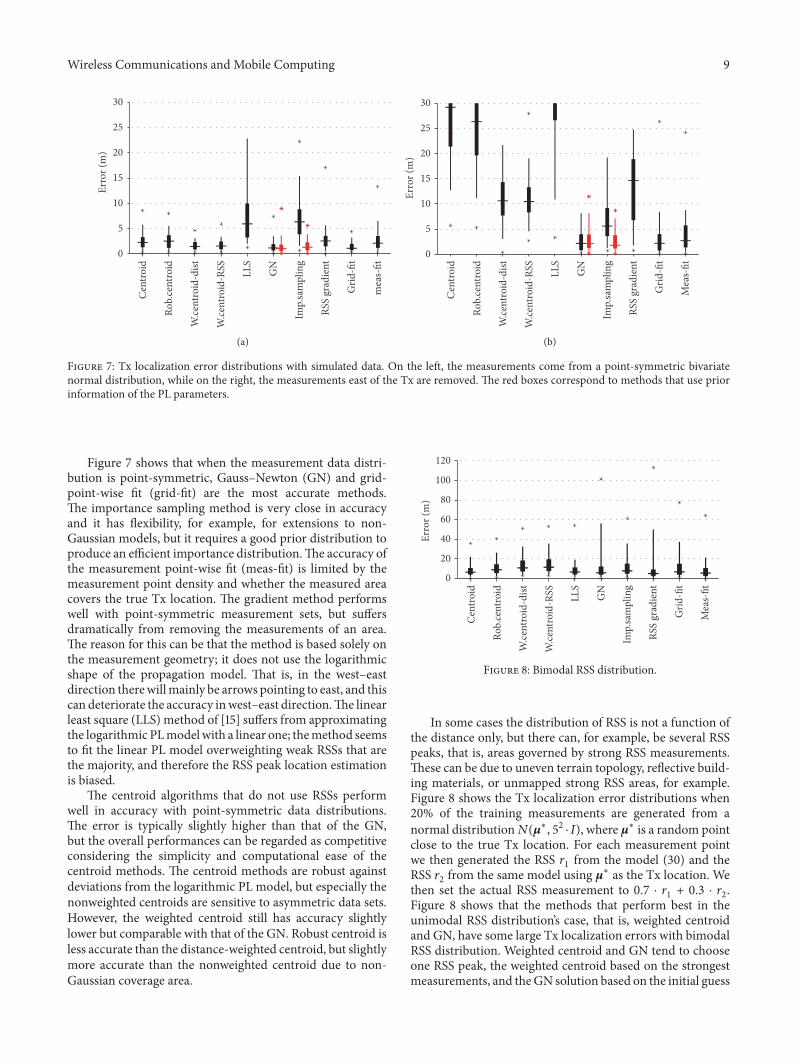
Wireless Communications and Mobile Computing 9
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
mea
s-fit
0
5
10
15
20
25
30Er
ror (
m)
(a)
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
(b)
Figure 7 Tx localization error distributions with simulated data On the left the measurements come from a point-symmetric bivariatenormal distribution while on the right the measurements east of the Tx are removed The red boxes correspond to methods that use priorinformation of the PL parameters
Figure 7 shows that when the measurement data distri-bution is point-symmetric GaussndashNewton (GN) and grid-point-wise fit (grid-fit) are the most accurate methodsThe importance sampling method is very close in accuracyand it has flexibility for example for extensions to non-Gaussian models but it requires a good prior distribution toproduce an efficient importance distributionThe accuracy ofthe measurement point-wise fit (meas-fit) is limited by themeasurement point density and whether the measured areacovers the true Tx location The gradient method performswell with point-symmetric measurement sets but suffersdramatically from removing the measurements of an areaThe reason for this can be that the method is based solely onthe measurement geometry it does not use the logarithmicshape of the propagation model That is in the westndasheastdirection therewillmainly be arrows pointing to east and thiscan deteriorate the accuracy inwestndasheast directionThe linearleast square (LLS) method of [15] suffers from approximatingthe logarithmic PLmodelwith a linear one themethod seemsto fit the linear PL model overweighting weak RSSs that arethe majority and therefore the RSS peak location estimationis biased
The centroid algorithms that do not use RSSs performwell in accuracy with point-symmetric data distributionsThe error is typically slightly higher than that of the GNbut the overall performances can be regarded as competitiveconsidering the simplicity and computational ease of thecentroid methods The centroid methods are robust againstdeviations from the logarithmic PL model but especially thenonweighted centroids are sensitive to asymmetric data setsHowever the weighted centroid still has accuracy slightlylower but comparable with that of the GN Robust centroid isless accurate than the distance-weighted centroid but slightlymore accurate than the nonweighted centroid due to non-Gaussian coverage area
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
20
40
60
80
100
120
Erro
r (m
)
Figure 8 Bimodal RSS distribution
In some cases the distribution of RSS is not a function ofthe distance only but there can for example be several RSSpeaks that is areas governed by strong RSS measurementsThese can be due to uneven terrain topology reflective build-ing materials or unmapped strong RSS areas for exampleFigure 8 shows the Tx localization error distributions when20 of the training measurements are generated from anormal distribution119873(120583lowast 52 sdot 119868) where 120583lowast is a random pointclose to the true Tx location For each measurement pointwe then generated the RSS 1199031 from the model (30) and theRSS 1199032 from the same model using 120583lowast as the Tx location Wethen set the actual RSS measurement to 07 sdot 1199031 + 03 sdot 1199032Figure 8 shows that the methods that perform best in theunimodal RSS distributionrsquos case that is weighted centroidand GN have some large Tx localization errors with bimodalRSS distribution Weighted centroid and GN tend to chooseone RSS peak the weighted centroid based on the strongestmeasurements and theGN solution based on the initial guess
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
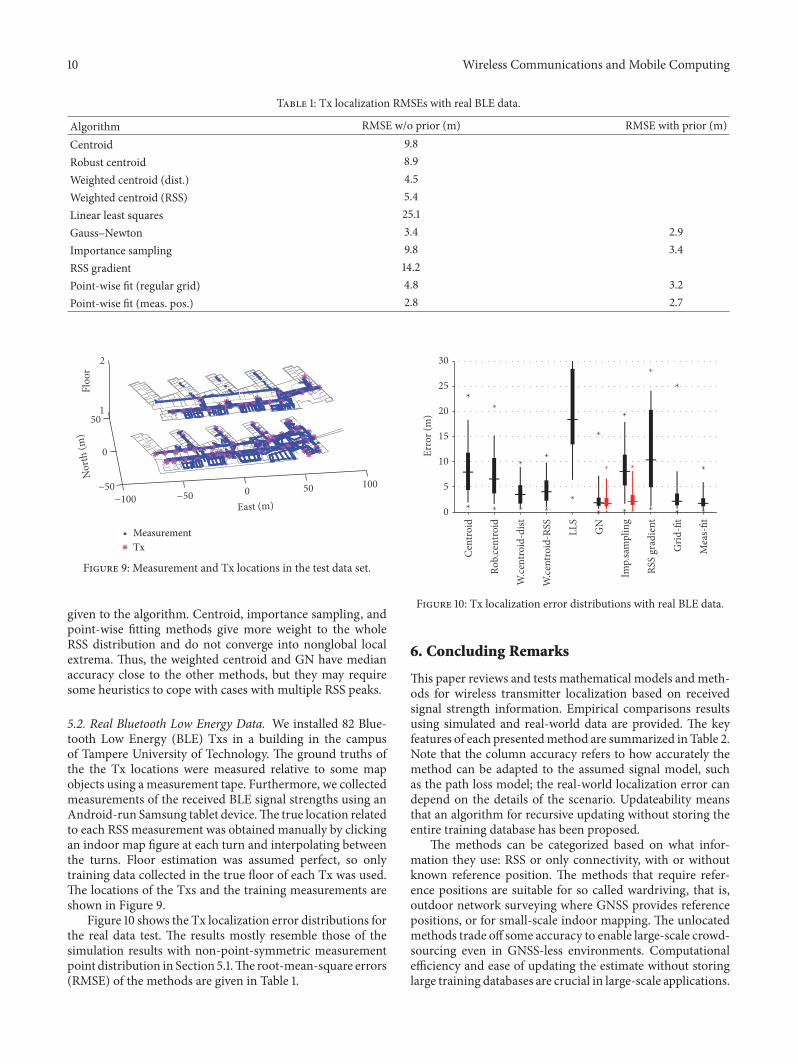
10 Wireless Communications and Mobile Computing
Table 1 Tx localization RMSEs with real BLE data
Algorithm RMSE wo prior (m) RMSE with prior (m)Centroid 98Robust centroid 89Weighted centroid (dist) 45Weighted centroid (RSS) 54Linear least squares 251GaussndashNewton 34 29Importance sampling 98 34RSS gradient 142Point-wise fit (regular grid) 48 32Point-wise fit (meas pos) 28 27
150
Floo
r
2
Nor
th (m
)
0
East (m)
10050minus50 0minus50minus100
MeasurementTx
Figure 9 Measurement and Tx locations in the test data set
given to the algorithm Centroid importance sampling andpoint-wise fitting methods give more weight to the wholeRSS distribution and do not converge into nonglobal localextrema Thus the weighted centroid and GN have medianaccuracy close to the other methods but they may requiresome heuristics to cope with cases with multiple RSS peaks
52 Real Bluetooth Low Energy Data We installed 82 Blue-tooth Low Energy (BLE) Txs in a building in the campusof Tampere University of Technology The ground truths ofthe the Tx locations were measured relative to some mapobjects using ameasurement tape Furthermore we collectedmeasurements of the received BLE signal strengths using anAndroid-run Samsung tablet deviceThe true location relatedto each RSS measurement was obtained manually by clickingan indoor map figure at each turn and interpolating betweenthe turns Floor estimation was assumed perfect so onlytraining data collected in the true floor of each Tx was usedThe locations of the Txs and the training measurements areshown in Figure 9
Figure 10 shows the Tx localization error distributions forthe real data test The results mostly resemble those of thesimulation results with non-point-symmetric measurementpoint distribution in Section 51The root-mean-square errors(RMSE) of the methods are given in Table 1
Cen
troid
Rob
cent
roid
Wce
ntro
id-d
ist
Wce
ntro
id-R
SS LLS
GN
Imp
sam
plin
g
RSS
grad
ient
Grid
-fit
Mea
s-fit
0
5
10
15
20
25
30
Erro
r (m
)
Figure 10 Tx localization error distributions with real BLE data
6 Concluding Remarks
This paper reviews and tests mathematical models andmeth-ods for wireless transmitter localization based on receivedsignal strength information Empirical comparisons resultsusing simulated and real-world data are provided The keyfeatures of each presentedmethod are summarized in Table 2Note that the column accuracy refers to how accurately themethod can be adapted to the assumed signal model suchas the path loss model the real-world localization error candepend on the details of the scenario Updateability meansthat an algorithm for recursive updating without storing theentire training database has been proposed
The methods can be categorized based on what infor-mation they use RSS or only connectivity with or withoutknown reference position The methods that require refer-ence positions are suitable for so called wardriving that isoutdoor network surveying where GNSS provides referencepositions or for small-scale indoor mapping The unlocatedmethods trade off some accuracy to enable large-scale crowd-sourcing even in GNSS-less environments Computationalefficiency and ease of updating the estimate without storinglarge training databases are crucial in large-scale applications
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
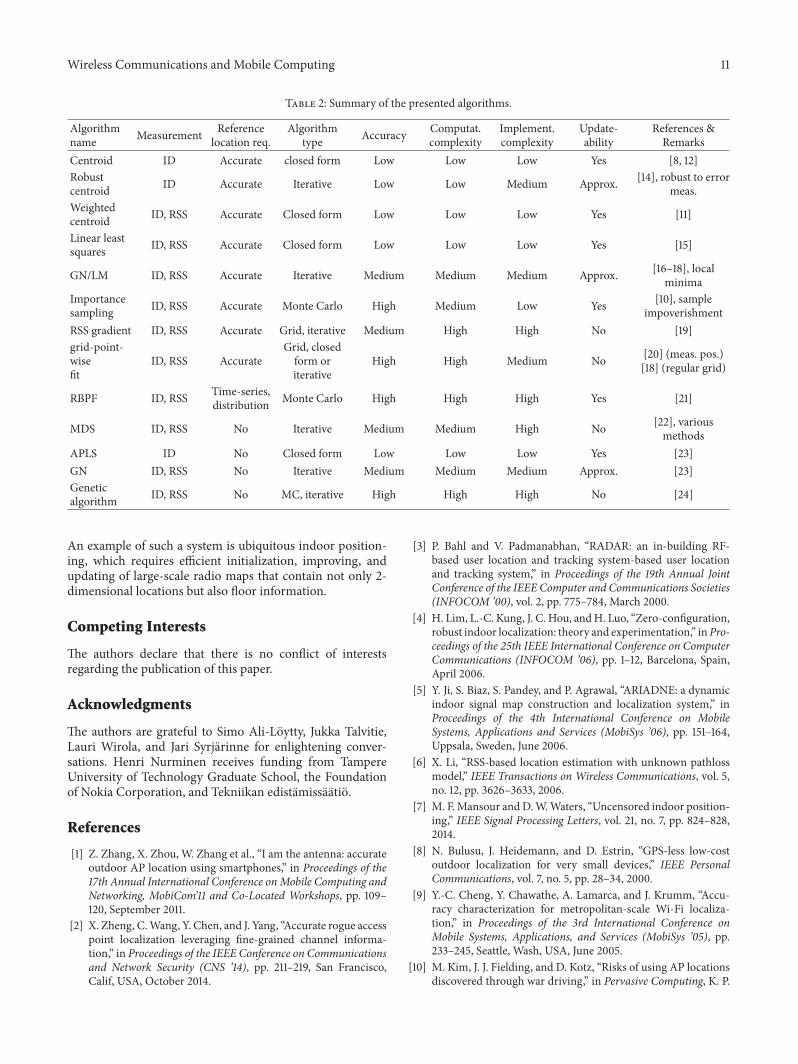
Wireless Communications and Mobile Computing 11
Table 2 Summary of the presented algorithms
Algorithmname Measurement Reference
location reqAlgorithm
type Accuracy Computatcomplexity
Implementcomplexity
Update-ability
References ampRemarks
Centroid ID Accurate closed form Low Low Low Yes [8 12]Robustcentroid ID Accurate Iterative Low Low Medium Approx [14] robust to error
measWeightedcentroid ID RSS Accurate Closed form Low Low Low Yes [11]
Linear leastsquares ID RSS Accurate Closed form Low Low Low Yes [15]
GNLM ID RSS Accurate Iterative Medium Medium Medium Approx [16ndash18] localminima
Importancesampling ID RSS Accurate Monte Carlo High Medium Low Yes [10] sample
impoverishmentRSS gradient ID RSS Accurate Grid iterative Medium High High No [19]grid-point-wisefit
ID RSS AccurateGrid closedform oriterative
High High Medium No [20] (meas pos)[18] (regular grid)
RBPF ID RSS Time-seriesdistribution Monte Carlo High High High Yes [21]
MDS ID RSS No Iterative Medium Medium High No [22] variousmethods
APLS ID No Closed form Low Low Low Yes [23]GN ID RSS No Iterative Medium Medium Medium Approx [23]Geneticalgorithm ID RSS No MC iterative High High High No [24]
An example of such a system is ubiquitous indoor position-ing which requires efficient initialization improving andupdating of large-scale radio maps that contain not only 2-dimensional locations but also floor information
Competing Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to Simo Ali-Loytty Jukka TalvitieLauri Wirola and Jari Syrjarinne for enlightening conver-sations Henri Nurminen receives funding from TampereUniversity of Technology Graduate School the Foundationof Nokia Corporation and Tekniikan edistamissaatio
References
[1] Z Zhang X Zhou W Zhang et al ldquoI am the antenna accurateoutdoor AP location using smartphonesrdquo in Proceedings of the17th Annual International Conference on Mobile Computing andNetworking MobiComrsquo11 and Co-Located Workshops pp 109ndash120 September 2011
[2] X Zheng CWang Y Chen and J Yang ldquoAccurate rogue accesspoint localization leveraging fine-grained channel informa-tionrdquo in Proceedings of the IEEE Conference on Communicationsand Network Security (CNS rsquo14) pp 211ndash219 San FranciscoCalif USA October 2014
[3] P Bahl and V Padmanabhan ldquoRADAR an in-building RF-based user location and tracking system-based user locationand tracking systemrdquo in Proceedings of the 19th Annual JointConference of the IEEE Computer and Communications Societies(INFOCOM rsquo00) vol 2 pp 775ndash784 March 2000
[4] H Lim L-C Kung J C Hou andH Luo ldquoZero-configurationrobust indoor localization theory and experimentationrdquo inPro-ceedings of the 25th IEEE International Conference on ComputerCommunications (INFOCOM rsquo06) pp 1ndash12 Barcelona SpainApril 2006
[5] Y Ji S Biaz S Pandey and P Agrawal ldquoARIADNE a dynamicindoor signal map construction and localization systemrdquo inProceedings of the 4th International Conference on MobileSystems Applications and Services (MobiSys rsquo06) pp 151ndash164Uppsala Sweden June 2006
[6] X Li ldquoRSS-based location estimation with unknown pathlossmodelrdquo IEEE Transactions on Wireless Communications vol 5no 12 pp 3626ndash3633 2006
[7] M FMansour andDWWaters ldquoUncensored indoor position-ingrdquo IEEE Signal Processing Letters vol 21 no 7 pp 824ndash8282014
[8] N Bulusu J Heidemann and D Estrin ldquoGPS-less low-costoutdoor localization for very small devicesrdquo IEEE PersonalCommunications vol 7 no 5 pp 28ndash34 2000
[9] Y-C Cheng Y Chawathe A Lamarca and J Krumm ldquoAccu-racy characterization for metropolitan-scale Wi-Fi localiza-tionrdquo in Proceedings of the 3rd International Conference onMobile Systems Applications and Services (MobiSys rsquo05) pp233ndash245 Seattle Wash USA June 2005
[10] M Kim J J Fielding and D Kotz ldquoRisks of using AP locationsdiscovered through war drivingrdquo in Pervasive Computing K P
12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

12 Wireless Communications and Mobile Computing
Fishkin B Schiele P Nixon and A Quigley Eds vol 3968 ofLecture Notes in Computer Science pp 67ndash82 Springer BerlinGermany 2006
[11] C Laurendeau and M Barbeau ldquoCentroid localization ofuncooperative nodes in wireless networks using a relative spanweighting methodrdquo EURASIP Journal on Wireless Communica-tions and Networking vol 2010 Article ID 567040 2009
[12] L Koski T Perala and R Piche ldquoIndoor positioning usingWLAN coverage area estimatesrdquo in Proceedings of the Interna-tional Conference on Indoor Positioning and Indoor Navigation(IPIN rsquo10) Zurich Switzerland September 2010
[13] J Wang P Urriza Y Han and D Cabric ldquoWeighted cen-troid localization algorithm theoretical analysis and distributedimplementationrdquo IEEE Transactions on Wireless Communica-tions vol 10 no 10 pp 3403ndash3413 2011
[14] R Piche ldquoRobust estimation of a reception region from locationfingerprintsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo11) pp 31ndash35 June 2011
[15] J Koo and H Cha ldquoLocalizing WiFi access points using signalstrengthrdquo IEEE Communications Letters vol 15 no 2 pp 187ndash189 2011
[16] H Nurminen J Talvitie S Ali-Loytty et al ldquoStatistical pathloss parameter estimation and positioning using RSS mea-surementsrdquo in Proceedings of the International Conference onUbiquitous Positioning Indoor Navigation and Location BasedService (UPINLBS rsquo12) October 2012
[17] Y Zhuang Z Syed J Georgy and N El-Sheimy ldquoAutonomoussmartphone-based WiFi positioning system by using accesspoints localization and crowdsourcingrdquo Pervasive and MobileComputing vol 18 pp 118ndash136 2015
[18] M A Abd Rahman M Dashti and J Zhang ldquoLocalizationof unknown indoor wireless transmitterrdquo in Proceedings of theInternational Conference on Localization and GNSS (ICL-GNSSrsquo13) June 2013
[19] D Han D Andersen M Kaminsky K Papagiannaki and SSeshan ldquoAccess point localization using local signal strengthgradientrdquo in Passive and Active Network Measurement S BMoon R Teixeira and S Uhlig Eds vol 5448 of Lecture Notesin Computer Science pp 99ndash108 Springer 2009
[20] S Shrestha J Talvitie and E S Lohan ldquoDeconvolution-basedindoor localization with WLAN signals and unknown accesspoint locationsrdquo in Proceedings of the International Conferenceon Localization and GNSS (ICL-GNSS rsquo13) pp 1ndash6 IEEE TurinItaly June 2013
[21] L Bruno and P Robertson ldquoWiSLAM improving FootSLAMwith WiFirdquo in Proceedings of the International Conference onIndoor Positioning and Indoor Navigation (IPIN rsquo11) pp 1ndash10Guimaraes Portugal September 2011
[22] J Koo andHCha ldquoUnsupervised locating ofWiFi access pointsusing smartphonesrdquo IEEE Transactions on Systems Man andCybernetics Part C Applications and Reviews vol 42 no 6 pp1341ndash1353 2012
[23] M Raitoharju T Fadjukoff S Ali-Loytty and R Piche ldquoUsingunlocated fingerprints in generation ofWLANmaps for indoorpositioningrdquo in Proceedings of the IEEEION Position Locationand Navigation Symposium (PLANS rsquo12) pp 576ndash583 MyrtleBeach SC USA April 2012
[24] K Chintalapudi A P Iyer and V N Padmanabhan ldquoIndoorlocalization without the painrdquo in Proceedings of the 16th AnnualConference on Mobile Computing and Networking (MobiComrsquo10) pp 173ndash184 September 2010
[25] X Yang and B Chen ldquoA novel method for measurement pointsselection in access points localizationrdquo Wireless Networks pp1ndash14 2016
[26] T S RappaportWireless Communications Principles and Prac-tice Prentice Hall PTR Upper Saddle River NJ USA 2ndedition 1996
[27] S Yiu M Dashti H Claussen and F Perez-Cruz ldquoLocatinguser equipments and access points using RSSI fingerprints agaussian process approachrdquo in Proceedings of the IEEE Interna-tional Conference on Communications (ICC rsquo16) pp 1ndash6 KualaLumpur Malaysia May 2016
[28] A FMolischWireless CommunicationsWiley-IEEEHobokenNJ USA 2nd edition 2011
[29] M B Kjaeligrgaard ldquoIndoor location fingerprinting with hetero-geneous clientsrdquo Pervasive and Mobile Computing vol 7 no 1pp 31ndash43 2011
[30] C Laoudias R Piche and C G Panayiotou ldquoDevice self-calibration in location systems using signal strength his-togramsrdquo Journal of Location Based Services vol 7 no 3 pp165ndash181 2013
[31] J Blumenthal R Grossmann F Golatowski and D Timmer-mann ldquoWeighted centroid localization in Zigbee-based sensornetworksrdquo in Proceedings of the IEEE International Symposiumon Intelligent Signal Processing (WISP rsquo07) October 2007
[32] A Savvides C C Han and M B Strivastava ldquoDynamicfine-grained localization in Ad-Hoc networks of sensorsrdquo inProceedings of the 7th Annual International Conference onMobile Computing and Networking (MobiCom rsquo01) pp 166ndash179ACM Rome Italy 2001
[33] K M Harwell A comparison of 80211 wireless transmitterlocalization techniques [MS thesis] Oklahoma State University2008 httphdlhandlenet1124410211
[34] A Bjorck Numerical Methods for Least Squares ProblemsSIAM Philadelphia Pa USA 1996
[35] H Nurminen Position estimation using RSS measurementswith unknown measurement model parameters [MS thesis]Tampere University of Technology Tampere Finland 2012httpURNfiURNNBNfitty-201212121369
[36] Y Zhuang Y Li H Lan Z Syed and N El-Sheimy ldquoWirelessaccess point localization using nonlinear least squares andmulti-Level quality controlrdquo IEEE Wireless CommunicationsLetters vol 4 no 6 pp 693ndash696 2015
[37] S SarkkaBayesian Filtering and Smoothing CambridgeUniver-sity Press Cambridge UK 2013
[38] A Achtzehn L Simic P Gronerth and P Mahonen ldquoApropagation-centric transmitter localization method for deriv-ing the spatial structure of opportunistic wireless networksrdquoin Proceedings of the 10th Annual Conference on Wireless On-DemandNetwork Systems and Services (WONS rsquo13) pp 139ndash146March 2013
[39] A Hansson and L Tufvesson Using sensor equipped smart-phones to localize WiFi access points [MS thesis] Lund Univer-sity 2011 httpwwwcontrollthsedocuments20115880pdf
[40] I Borg and P J Groenen Modern Multidimensional ScalingSpringer New York NY USA 2nd edition 2005
[41] E S Lohan J Talvitie P Figueiredo e Silva H NurminenS Ali-Loytty and R Piche ldquoReceived signal strength modelsfor WLAN and BLE-based indoor positioning in multi-floorbuildingsrdquo in Proceedings of the International Conference onLocalization and GNSS (ICL-GNSS rsquo15) IEEE GothenburgSweden June 2015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
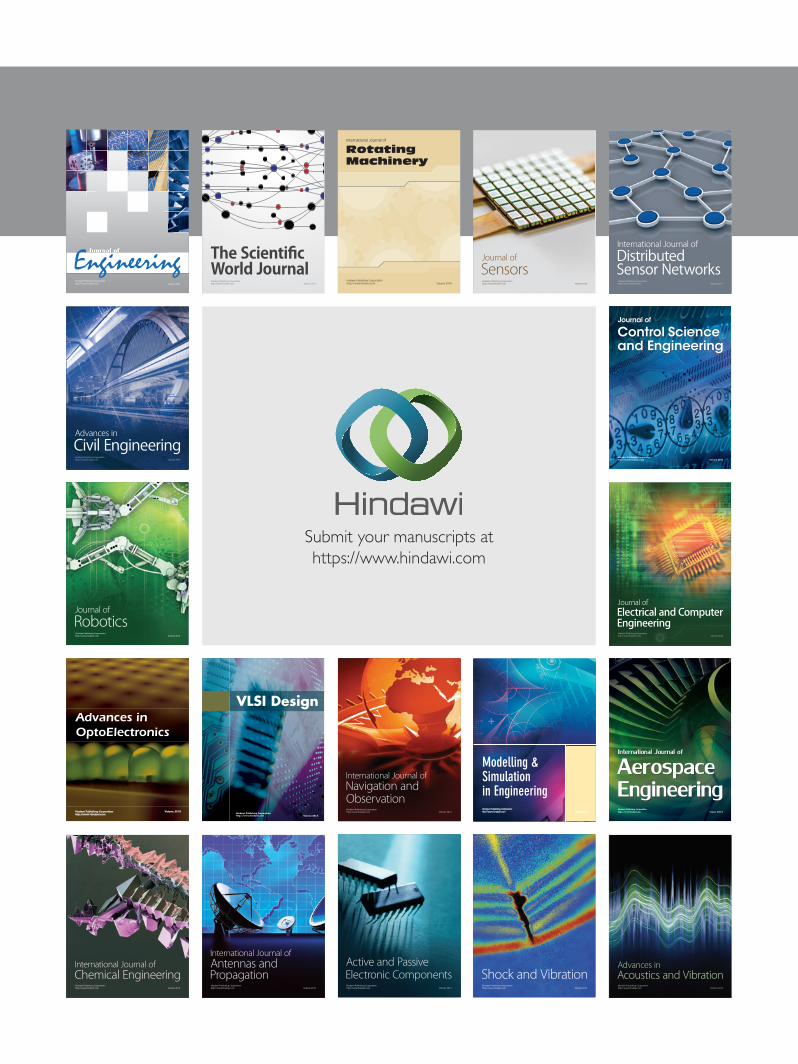
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of





























