Embed Size (px)
Citation preview
A Versatile and Safe Mobility Assistant*
Kim, Min-Jung2001/6/12
Special Topics in RoboticsSpecial Topics in Robotics
Design and Control of Devices for Human-Movement Assistance
Article review
*A. Lankenau and T. Rofer, IEEE Robotics & Automation Magazine, March, 2001, pp. 29~37
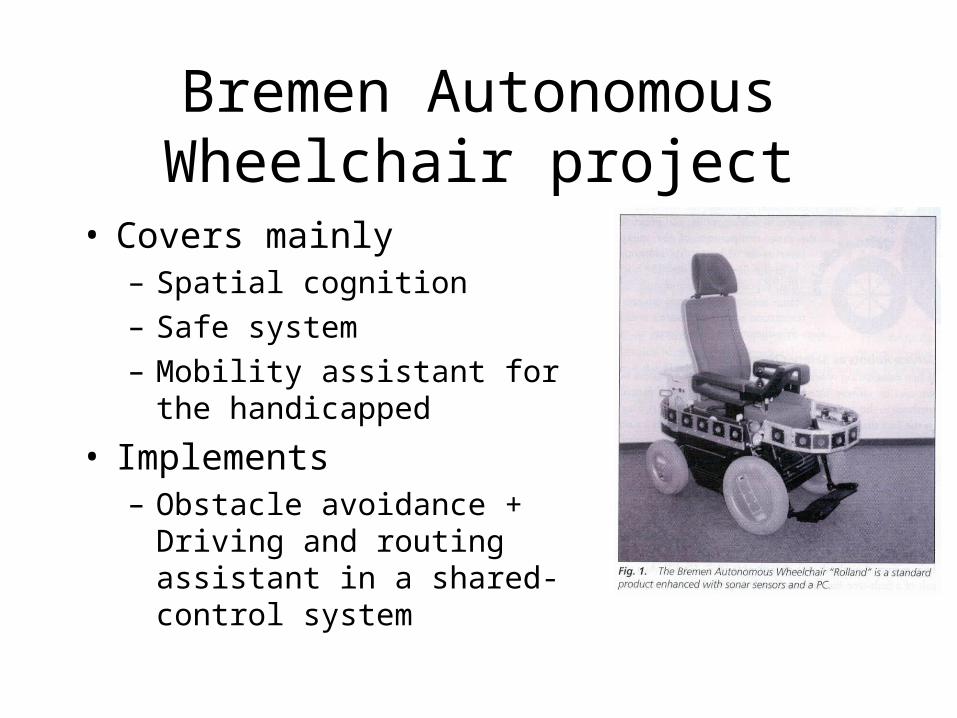
Bremen Autonomous Wheelchair project
• Covers mainly – Spatial cognition– Safe system– Mobility assistant for the
handicapped
• Implements – Obstacle avoidance +
Driving and routing assistant in a shared-control system
Principle idea
• A shared-control system– The wheelchair changes the
dangerous target command into a safe one.

Safety Layer (1/4)
• Local Obstacle Map– A quadratic array of cells,
each of which encodes the presence of an obstacle at the corresponding position in the environment of the wheelchair
– The wheelchair’s current rotational deviation to the map is continuously updated
Safety Layer (2/4)
• Adaptive Sonar Firing Strategy– 27 ultrasonic sensors– Can only fire 2 of its 27 sensors simultane
ously. It involves the risk of overlooking relevant obstacles.
Firing strategy is needed
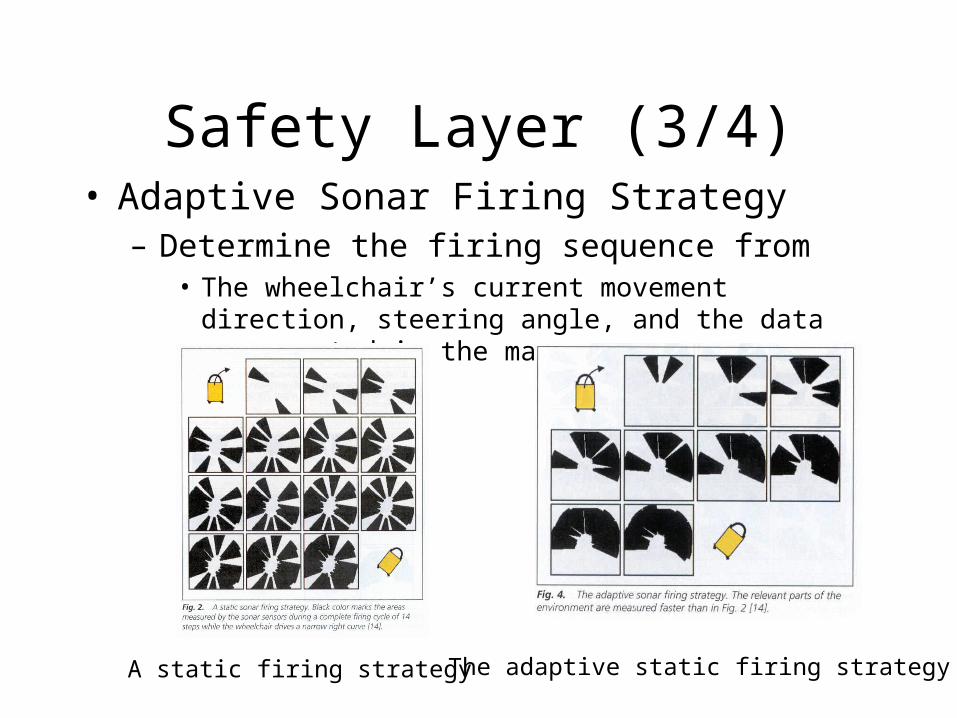
Safety Layer (3/4)• Adaptive Sonar Firing Strategy
– Determine the firing sequence from• The wheelchair’s current movement direction,
steering angle, and the data represented in the map
A static firing strategy The adaptive static firing strategy

Safety Layer (4/4)
• Stopping in time– The following things must be
considered• The wheelchair’s deceleration and its
reaction time• The travel distance to the closest
obstacle
Elementary skills (1/3)
• Smooth speed control– Early detection of obstacles can
make the wheelchair decelerate in a smooth manner
– The user can concentrate on steering

Elementary skills (2/3)
• Obstacle avoidance– The assistive system
infers the will of the user whether the user moves to right or left and reinforce the trend
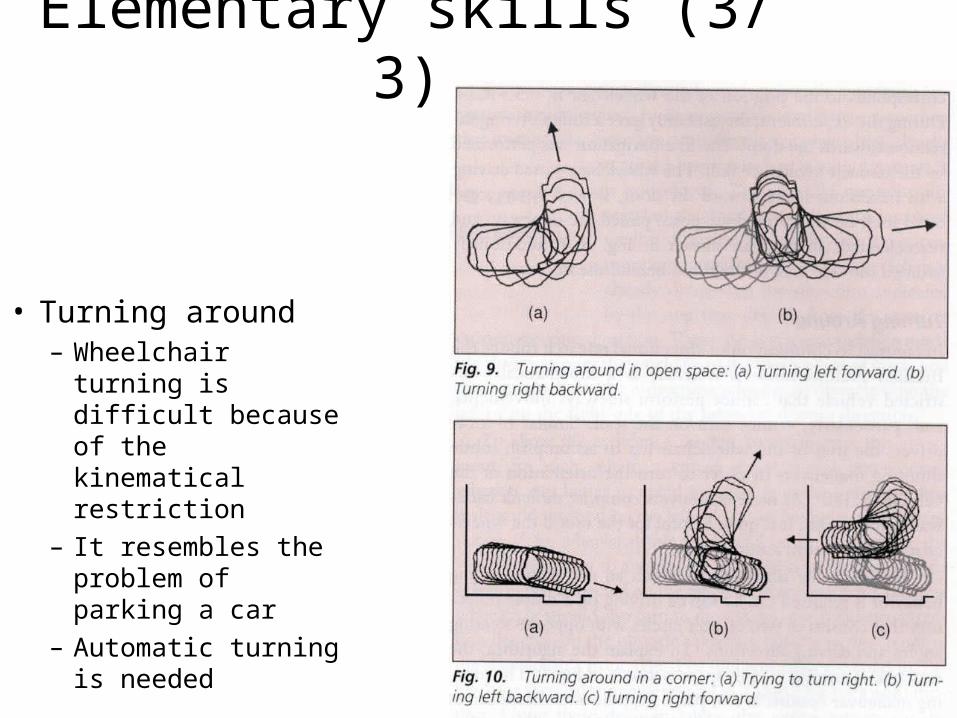
Elementary skills (3/3)
• Turning around– Wheelchair
turning is difficult because of the kinematical restriction
– It resembles the problem of parking a car
– Automatic turning is needed

The mobility assistant
• The driving assistant– It combines above three elementary
skills for the users to concentrate on steering
• The route assistant– The large scale navigation is done by
it especially for the users who have amnesia*
*amnesia: Partial or total loss of memory, usually resulting from shock, psychological disturbance, brain injury, or illness

Conclusion
• The Bremen Autonomous Wheelchair is designed for the handicapped in a shared-control manner
• Implemented safety layer and elementary skills for the user’s safe and comfortable navigation