-
19.12.2011 . Lozina: Mehanika 3, FESB 1
DINAMIKA TIJELAu PROSTORU
Jednadbe gibanja
9.12.2011 . Lozina: Mehanika 3, FESB 2
Vektorski pristup i gibanje tijelaTijelo je sustav estica, pa za
njega vrijede sve ope jednadbe izvedene za sustav estica.
Za tijelo u prostoru vrijede i do sada izvedene vektorske
jednadbe gibanja za tijelo u ravnini na koje nisu postavljana
posebna ogranienja u vezi prostora. Slijedi pregled:
9.12.2011 . Lozina: Mehanika 3, FESB 3
Tijelo je sustav estica=F G& G GM = H& 1 2 e gW T V V =
+ +
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 4
Kruto tijelo
Razmak izmeu proizvoljno odabranih estica krutog tijelase ne
mijenja
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 5
KINEMATIKA: Brzina ope estice tijela
{/i G
i G iv
v = v +
G
rG
ri
ivGvi/G
vi/G
vG
vi=vG+vi/G
vi
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 6
Neovisnost koliine gibanja o kutnoj brzini
( )i i
i G i
G i i
G
m
m
m m
m
=
= +
= +
=
G vG v G v G v
Ponavljanje
-
29.12.2011 . Lozina: Mehanika 3, FESB 7
Neovisnost Momenta koliine gibanja o brzini centra mase
( )( ) ( )
( )
G i i i
G i i G i
G i i G i i i
G i i i
m
m
m m
m
=
= +
= +
=
H v
H v
H v
H
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 8
Formalna slinost momenta koliine gibanja za nepominu toku tijela
O i centar mase G
d
d
Gm
Gm
m
m
=
=
H
H
&
d
d
Om
Om
m
m
=
=
H r v
H r r
Ponavljanje
vG
vi=vG+vi/G
vi
G
i
vi/G
ri
rG
vi/G
vG
O
9.12.2011 . Lozina: Mehanika 3, FESB 9
0
0 00 0 d
0 0
z y
z x
m
y x
z y xz x y m
y x z
=
H
Moment tromosti krutog tijelaNapomena:
0
00 d
0
z y
z x
m
y x
z y y zz x x z m
y x x y
= +
H
( )0d dmH = r rU matrinom obliku je:
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 10
( ) ( )( ) ( )
( ) ( )0 d
z x y x
z y y xm
z y z x
z x z y x y
z y z x x y m
y y z x x z
+
= +
+
H
2 2
2 20
2 2
dx
ym
z
z y xy xzyx x z yz mzx zy y x
+
= + +
H
0H = I
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 11
xx xy xz
yx yy yz
zx zy zz
I I II I II I I
=
I
( )( )
( )
2 2
2 2
2 2
d d d
d d d
d d d
m m m
m m m
m m m
z y m xy m xz m
yx m x z m yz m
zx m zy m y x m
+
= +
+
I
Gdje je: Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 12
( )2 2 dd
d
xx
m
xym
xz
m
I z y m
I xy m
I xz m
= +
=
=
I gdje je:
Ponavljanje
-
39.12.2011 . Lozina: Mehanika 3, FESB 13
Kinetika energija12 i i ii
T m= v v
i G i= + v v
( ) ( )12 i G i G ii
T m= + + v v
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 14
( ) ( )121 22
i G i G ii
i G Gi
T m
T m
= + +
= +
v v
v v12
( ) ( ) ( )0
12
i i
i G i i i ii i
m m
+
v
1442443 14444244443
( ) ( )1 12 2i i i i i ii i
m m =
Prelaskom u matrini oblik je:
1 12 2
Ti i i i i i
i im T mH I I = =
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 15
1 12 2
T TG GT m= +v v I
Konano, u matrinom obliku Kinetika energija je:
Ponavljanje
1 12 2
T TG GT v G H= +
9.12.2011 . Lozina: Mehanika 3, FESB 16
Primjer 1: Odredi matricu momenta tromosti tapa za centralne
osi. Poznato: l, m.
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 17
m mdm Adx dxAL L
= =
2 2
3 222 2 2
22
2 2 2
( ) 0
( )3 12
( )12
xx
m
L
yyL
m L
zz
m L
I y z dm
m m x mLI z x dm x dxL L
m mLI x y dm y dxL
= + =
= + = = =
= + = =
0
0
0
xym
yzm
zx
m
I yxdm
I zydm
I xzdm
= =
= =
= =
Ponavljanje
9.12.2011 . Lozina: Mehanika 3, FESB 18
2
2
0 0 0
0 012
0 012
mL
mL
=
I
Konano, matrica tromosti tapa je:
Ponavljanje
-
49.12.2011 . Lozina: Mehanika 3, FESB 19
Primjer 2: Odredi matricu momenata tromosti diska za centralne
osi. Poznato: R, m.
y
x
z
G
R
9.12.2011 . Lozina: Mehanika 3, FESB 20
2
4
m mdm LdA dAdAL pi
= =
( ) ( )2 2 2 22 24 2
2
2
4 4
32 84
2
Axx P
m A
xx
xx
m mI y z dm y z dA Jd d
m d mdId
mRI
pi pi
pi
pi
= + = + =
= =
=
9.12.2011 . Lozina: Mehanika 3, FESB 21
Konano, matrica tromosti diska je:
2 2zzI y x= +( ) 2
m m
dm y dm=
2
2
2
0 02
0 04
0 04
mR
mR
mR
=
I
( ) ( )2 2 2 2zz yy
xx
m m m
I I
I y z dm y dm z dm= + = + 123 14243
2 2yyI z x= +( ) 2
m m
dm z dm=
2
2 4xx
yy zzI mRI I= = =
yy zzI I=
9.12.2011 . Lozina: Mehanika 3, FESB 22
Jednadbe gibanja 1
=M H&Gm=F r&&
9.12.2011 . Lozina: Mehanika 3, FESB 23
Jednadbe gibanja 2
xyz
ddt
= +
HH H&
xyz
ddt
= +
= +
HH H
H I I
%&
%& &
Matrino:
9.12.2011 . Lozina: Mehanika 3, FESB 24
Jednadbe gibanja 2aIlustracija:
( ) {d
d d d /d
dd
xyz
xyz
t t
t
= +
= +
H H H
HH H&
+
H
(dH)xyz
x Hdt
dt
(dH)xyz x Hdt
-
59.12.2011 . Lozina: Mehanika 3, FESB 25
Jednadbe gibanja 30
00
x xx xy xz x z y xx xy xz x
y yx yy yz y z x yx yy yz y
z zx zy zz z y x zx zy zz z
M I I I I I IM I I I I I IM I I I I I I
= +
&
&
&
00
0
x xx x z y xx x
y yy y z x yy y
z zz z y x zz z
M I IM I IM I I
= +
&
&
&
( )( )( )
x xx x yy zz y z
y yy y zz xx z x
z zz z xx yy x y
M I I I
M I I I
M I I I
=
=
=
&
&
&
Za glavne osi tijela je:
9.12.2011 . Lozina: Mehanika 3, FESB 26
Primjer 1: Pojasni fizikalno znaenje momenata tromosti i
devijatorskih momenata tromosti na primjeru na slici. Sustav ima
jedan stupanj slobode gibanja: osovina se vrti samo oko osi z.
9.12.2011 . Lozina: Mehanika 3, FESB 27
2
2 2
2
00 ( ) 0
0
ma mar
m a r
mar mr
= +
I
O O O= +M I I %2
2 2
2
2
2 2
2
0 00 ( ) 0 0
0
0 0 0 0 0 0 0 ( ) 0 0
0 0 0 0
x
y
z z
z
z
z
M ma marM m a rM mar mr
ma mar
m a r
mar mr
= + +
+ +
Rjeenje:
9.12.2011 . Lozina: Mehanika 3, FESB 28
2
2
00
0
x
y z z
z
M marM marM mr
= +
9.12.2011 . Lozina: Mehanika 3, FESB 29
Primjer 2: Robot rotira sastavljenu elinu plou debljine t, prema
slici, oko nepomine toke O zadanom brzinom i ubrzanjem . Odredi
moment M kojim hvataljka rotira plou oko toke O, potrebnu snagu P
za zadanu rotaciju i trenutnu kinetiku energiju T sastavljene
ploe.Poznato: a=1m , b=0.8m , h=0.5m , t=0.02m , = -5i+9j1/s2, =
6i-4j 1/s, =7.9kg/m3, m1=0.126kg, m2=0.063kg
9.12.2011 . Lozina: Mehanika 3, FESB 30
2 2 21 2 1
2 21 1 2 2
O
2 2 22 1 2
O
( ) 03 3 4
4 3 3 4( )0
4 3 30.0456 0.025 0
0.025 0.0472 0.00630 0.0063 0.0823
m b m b h m ab
m ab m a m h m bh
m bh m a b m b
++
= + =
+ +
=
I
I
Rjeenje:
-
69.12.2011 . Lozina: Mehanika 3, FESB 31
( )
12
O 1
1 2
O 1
2 20
200
2
2
x
y
z
x
y
z
bm g b
m gMaM m g
M
bM m m g
aM m g
M
= + +
+
= +
M
M
0
0.5540.3980.595
x
y
z
MMM
= +
M
9.12.2011 . Lozina: Mehanika 3, FESB 32
O O O= +M I I %
0.554 0.0456 0.025 0 50.398 0.025 0.0472 0.0063 90.595 0 0.0063
0.0823 0
0 0 4 0.0456 0.025 0 0 0 6 0.025 0.0472 0.0063
4 6 0 0 0.0063 0.0823
x
y
z
MMM
+ = +
+
64
0
0.1870.090 Nm
0.59
x
y
z
MMM
=
9.12.2011 . Lozina: Mehanika 3, FESB 33
Snaga robota:
0.1876 4 0 0.090
0.590.208 W
x
Tx y z y
z
MP M
M
P
P
= =
=
=
M
9.12.2011 . Lozina: Mehanika 3, FESB 34
Trenutna kinetika energija sloene ploe (toka O je trenutni pol
brzina):
12
0.0456 0.025 0 61 6 4 0 0.025 0.0472 0.0063 42
0 0.0063 0.0823 03.6288 Nm
TOT
T
T
=
=
=
I
9.12.2011 . Lozina: Mehanika 3, FESB 35
Primjer 3: Rotacije slobodnog tijela u prostoru: Zadano je
slobodno tijelo u prostoru (kojem centar mase miruje, to nije bitna
pretpostavka, ve je vezana uz percepciju) s matricom tromosti I s
poetnom kutnom brzinom .Prikazati Poinsotovu konstrukciju polhoda i
komentirati stabilnost gibanja.Napomena: Razmatranje vrijedi i za
tijelo oslonjeno u centru mase u homogenom gravitacijskom
polju.
9.12.2011 . Lozina: Mehanika 3, FESB 36
Rjeenje:Poinsotova konstrukcija se oslanja na princip ouvanja
momenta koliine gibanja (nema vanjskih momenata):
0G
G
konstHH
=
=&
E T V= +0
konstT
=
=&
( )( )
2 2 21 1 2 2 3 3
2 2 21 1 2 2 3 3
12
2
T I I I
T I I I
= + +
= + +
1 1 1 2 2 2 3 3 3G I I IH e e e = + +
U glavnim osima je:
I Princip ouvanja mehanike energije (vanjske sile ne vre
rad):
kao i:
-
79.12.2011 . Lozina: Mehanika 3, FESB 37
Moment koliine gibanja je ouvan samo u inercijskom koordinatnom
sustavu:
GG GH H H= + o
&
0
0
G
G G
G G
H
H H
H H
=
= +
=
o
o
&
gdje krui oznaava lokalnu (materijalnu) vremensku derivaciju, pa
je:
Lako se uvjeriti da vrijedi:2 GT H =
9.12.2011 . Lozina: Mehanika 3, FESB 38
Osim toga vrijedi:
22 231 2
1 2 3
12 2 2T T TI I I
= + +
( )2 G GT H H
= =
Uoimo elipsoid u materijalnom koordinatnom sustavu:
odakle zakljuujemo da je vektor momenta koliine gibanja HG
okomit na tangencijalnu ravninu elipsoida u toki trenutne kutne
brzine, to se sve moe ilustrirati slikom:
9.12.2011 . Lozina: Mehanika 3, FESB 39
HG
12
= konst
12T
I
.
1 2 31 2 3
GTT T TT
H
e e e
= = + +
plhode
herplhode
9.12.2011 . Lozina: Mehanika 3, FESB 40
Djelomina analiza stabilnosti gibanja: Od interesa je
analizirati gibanje kutnom brzinom koja je paralelna momentu
koliine gibanja HG.
( )00
G
G
G
H I
I E
=
=
=
U sluaju kada nema vanjskog momenta, tijelo se vrti slobodno (po
inerciji) jednadba gibanja u glavnim osima tijela je (centralni
materijalni koordinatni sustav u smjeru glavnih osi tijela):
1 1 2 3 2 3
2 2 3 1 3 1
3 3 1 2 1 2
0 ( )0 ( )0 ( )
I I II I II I I
=
=
=
&
&
&
1 1 2 3 2 3
2 2 3 1 3 1
3 3 1 2 1 2
( )( )( )
I I II I II I I
=
=
=
&
&
&
2 31 2 3
1
3 12 3 1
2
1 23 1 2
3
( )
( )
( )
I II
I II
I II
=
=
=
&
&
&
9.12.2011 . Lozina: Mehanika 3, FESB 41
2 3 2 330 20
1 11 1
3 1 3 12 30 10 2
2 23 3
1 2 1 220 10
3 3
( ) ( )0
( ) ( )1 02
( ) ( ) 0
I I I II I
I I I II I
I I I II I
=
&
&
&
a) 1 2 30 0 0 = = 1 2 30 0 0 = =1 2 30 0 0 = =
b) c)
9.12.2011 . Lozina: Mehanika 3, FESB 42
odakle slijedi da je gibanje stabilno, tj. oscilira oko
trenutnog poloaja (vektor brzine
2 3 2 330 20
1 1
( ) ( )0 I I I II I
J
=3 1 3 1
30 102 2
( ) ( )0I I I II I
1 220
3
( )I II
1 2
103
( )I II
2 330
1
3 130
2
( )0 0
( ) 0 0
0 0 00
I II
I II
=
( )( )1
2 3 3 12/ 3
2 3
0
I I I Ii
I I
=
= =
a) Tangentna (Jacobieva) matrica u ovom sluaju je:Pripadne
svojstvene vrijednosti su:
-
89.12.2011 . Lozina: Mehanika 3, FESB 43
b) U ovom sluaju:2 3
201
1 230
3
( )0 0
0 0 0( ) 0 0
I II
JI I
I
=
( )( )1
2 3 1 22/3
1 3
0
I I I II I
=
= =
odakle slijedi da je ovo prijelazno gibanje kroz os 2, kutna
brzina samo prolazi kroz os 2.
c) Za os 1 se dobiju kompleksni korjeni to svjedoi o stabilnosti
gibanja kao za os 3 (vektor brzine krui oko osi 1).
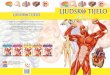
9.12.2011 . Lozina: Mehanika 3, FESB 44
Ove rezultate potkrepljuje slika polhoda:
Slika 3: Polhode na elipsoidu kutnih brzina u materijalnom
sustavu
1
3
2
Vidi video: YouTube: polhode
9.12.2011 . Lozina: Mehanika 3, FESB 45
Primjer 4: Pokai da svako slobodno tijelo sa zadanom poetnom
kutnom brzinom u realnim uvjetima gubitka energije tei vrtnji oko
glave osi I1 (osi najvie tromosti).
9.12.2011 . Lozina: Mehanika 3, FESB 46
Rjeenje:Za sve izolirane sustave pa tako i slobodno tijelo koje
se giba vrijedi prvi zakon termodinamike:
E T V= +
Q konst+ =
12 G
T H = {12 G
konst
T H =
G GH I = {G Gkonst
H I =
Vidi video: YouTube: stable rotation
9.12.2011 . Lozina: Mehanika 3, FESB 47
Posebni sluajevi gibanja tijela Sferno gibanja Prostorna
translacija Gibanje u paralelnim ravninama Vrtnja oko nepomine osi
Ravninsko gibanje
9.12.2011 . Lozina: Mehanika 3, FESB 48
Prostorna translacijax x y y z zF ma F ma F ma= = =
00
0
x xx xy xz x z y xx xy xz x
y yx yy yz y z x yx yy yz y
z zx zy zz z y x zx zy zz z
M I I I I I IM I I I I I IM I I I I I I
= +
&
&
&
Sferno gibanje
-
99.12.2011 . Lozina: Mehanika 3, FESB 49
Gibanje tijela u paralelenimravninama
000
x
y
z
v
v
v
=
00
x y
z
= =
9.12.2011 . Lozina: Mehanika 3, FESB 50
0x x y y zF ma F ma F= = =
0 0 0 00 0 0 0
0 0 0
x xx xy xz z xx xy xz
y yx yy yz z yx yy yz
z zx zy zz z zx zy zz z
M I I I I I IM I I I I I IM I I I I I I
= +
&
Jednadbe gibanja sada glase:
2
0
x xz yz
y z yz z xz
z zz
M I IM I IM I
= +
&
9.12.2011 . Lozina: Mehanika 3, FESB 51
Vrtnja oko nepomine osi
2N z
T z
a r
a r
=
=
Vrtnja oko nepomine osi se moe promatrai kao gibanje u
paralelnim ravninama.
9.12.2011 . Lozina: Mehanika 3, FESB 52
2 0x z y z zF m r F m r F = = =
2
0
x xz yz
y z yz z xz
z zz
M I IM I IM I
= +
9.12.2011 . Lozina: Mehanika 3, FESB 53
Ravninsko gibanje Ravninska Translacija Vrtnja oko nepomine toke
(osi) Ope ravninsko gibanje
x x y yF ma F ma= =
0xz yzI I= =
z zz zM I = &9.12.2011 . Lozina: Mehanika 3, FESB 54
Ogledna pitanja i zadaci 1 Pojasni pojam glavne osi tromosti
tijela. Prikai moment koliine gibanja (kinetiki
moment) tijela preko matrice tenzoratromosti i vektora kutne
brzine.
Da li se pri gibanju tijela vektor momenta koliine gibanja
poklapa po pravcu s vektorom kutne brzine?
-
10
9.12.2011 . Lozina: Mehanika 3, FESB 55
Ogledna pitanja i zadaci 2 Da li postoje okolnosti pod kojima se
pri
gibanju tijela vektor momenta koliine gibanja poklapa po pravcu
s vektorom kutne brzine?
Pojasni fizikalno znaenje devijatorskogmomenta tromosti na
odabranom primjeru.
Eulerove jednadbe gibanja.
9.12.2011 . Lozina: Mehanika 3, FESB 56
Ogledna pitanja i zadaci 3 Da li jednadbe gibanja tijela moemo
postaviti u
lokalnom koordinatnm sustavu tijela i zato? U inercijskom
sustavu, pri gibanju tijela u opem
sluaju, moment tromosti krutog tijela se stalno mijenja. Kako
prevladavamo tu potekou pri postavljanju jednadbi gibanja.
Pojasni izraz za punu vremensku derivaciju vektora prikazanog u
pominom koordinatnom sustavu.
9.12.2011 . Lozina: Mehanika 3, FESB 57
Ogledna pitanja i zadaci 4 Zadano je tijelo (matrica tenzora
tromosti)
te vektori kutne brzine i ubrzanja. Odredi moment koji uzrokuje
to gibanje.
Zadano je tijelo (matrica tenzora tromosti) te vektori kutne
brzine i ubrzanja. Odredi trenutni moment koliine gibanja H i
trenutnu kinetiku energiju T.
9.12.2011 . Lozina: Mehanika 3, FESB 58
Ogledna pitanja i zadaci 5 Slobodno gibanje tijela u prostoru
Poinsotova
konstrukcija Da li je slobodna vrtnja tijela u prostoru
stabilna
oko svake glavne osi tijela? Objasni pojavu da se tijelo, koje
se u realnim
uvjetima u prostoru slobodno vrti oko najmanje osi tromosti,
nakon odreenog vremena pone vrtiti oko osi s najveim momentom
tromosti.
9.12.2011 . Lozina: Mehanika 3, FESB 59
KRAJ