Embed Size (px)
Citation preview

รายงานฉบับที่ วพ. 238 สํานักวิจัยและพัฒนางานทาง REPORT NO. RD 238 BEREAU OF ROAD RESEARCH AND DEVELOPMENT
ระยะหางในการขับรถยนตตามกันที่ปลอดภัย
โดย
ดร.พลเทพ เลิศวรวนิช นายณัฐสม สงวนวงษ
นายมงคล ทวีชัยทศพล
กรมทางหลวง กระทรวงคมนาคม DEPARTMENT OF HIGHWAYS, MINISTRY OF TRANSPORT
RATCHATHEWI, BANGKOK 10400, THAILAND

ระยะหางในการขับรถยนตตามกันที่ปลอดภัย
โดย
ดร.พลเทพ เลิศวรวนิช นายณัฐสม สงวนวงษ นายมงคล ทวีชัยทศพล
รายงานฉบับท่ี วพ. 238
สํานักวิจัยและพัฒนางานทาง กรมทางหลวง
มกราคม 2550
ISSN XXXX
รายงานน้ีเปนความคิดของผูเขียนเทาน้ัน กรมทางหลวงไมมีสวนผูกพันแตอยางใด

คํานําคํานํา กรมทางหลวง เปนหนวยงานหลักที่รับผิดชอบดาน การวางแผน การออกแบบ การกอสราง และการบํารุงรักษาทางหลวงแผนดินทั่วประเทศไทย ดังนั้น กรมทางหลวงจึงมีพันธกิจทั้งในดานการสงเสริมความมีประสิทธิภาพของการขนสงทางถนนและสงเสริมการอํานวยความปลอดภัยแกสาธารณะโดยพรอมกัน ในปจจุบันการคมนาคมขนสงเปนสวนที่ขาดไมไดของการดําเนินกิจกรรมทางเศรษฐกิจสังคม แตตนทุนการสูญเสียชีวิตและทรัพยสินอันเนื่องมาจากอุบัติเหตุทางถนนที่สังคมตองจาย แตผลที่ไมพึงประสงคของการเพิ่มขึ้นของการคมนาคมขนสงเชนเดียวกัน ซ่ึงคาใชจายสวนนี้ทุกคนในประเทศยอมตระหนักวามีผลกระทบรายแรงตอสภาพความเปนอยูของคนในสังคม ดวยความพยายามที่จะลดจํานวนอุบัติเหตุทางถนน งานวิจัยนี้ไดนําเสนอแนวคิดแบบใหมที่ไมเคยประยุกตใชมากอน ซ่ึงเรียกวาการกําหนดระยะหางที่ปลอดภัยในการขับขี่มาพิจารณา โดยไดทําการออกแบบปาย และ เครื่องหมายบนผิวจราจร เพื่อใหผูขับขี่สามารถทราบถึงระยะหางที่ปลอดภัยในระหวางการขับขี่ได อยางไรก็ตาม แบบแนะนําดังกลาวไมใชขอกําหนด หรือ ขอบังคับในการปฏิบัติ แตมีวัตถุประสงคเพื่อเปนการแนะนําในการขับขี่ที่ปลอดภัย และที่สําคัญคือเปนจุดเริ่มตนในการวิจัย และ พัฒนาเพื่อลดจํานวนอุบัติเหตุทางถนนตอไป
(นายทรงศักดิ์ แพเจริญ) อธิบดีกรมทางหลวง

บทคัดยอบทคัดยอ
ในปจจุบันนี้ การคมนาคมขนสงเปนสิ่งจําเปนในการดําเนินกิจกรรมทางเศรษฐกิจและสังคม แตผลเสียอันสืบเนื่องมาจากการเพิ่มขึ้นของการคมนาคม คือ การสูญเสียทรัพยสิน การสูญเสียชีวิต และ การบาดเจ็บที่สังคมตองแบกภาระไว ปจจุบันในประเทศไทยมีอุบัติเหตุทางถนนเกิดขึ้นมากกวา 100,000 คร้ังตอป โดยมีอัตราการเสียชีวิตที่เกี่ยวของกับอุบัติเหตุทางถนนถึง 12,000 รายตอป ดังนั้น ไมวาจะใชสูตร หรือ สมการทางคณิตศาสตรใด ๆ ในการคํานวณความสูญเสียหรือความเครียดทางจิตใจออกมาเปนตัวเงินแลว ตนทุนทางสังคมที่แทจริงอันสืบเนื่องมาจากอุบัติเหตุทางถนนนั้นมหาศาล และ จําเปนตองไดรับความใสใจจากสังคม ถึงแมวาไมมีสถิติแยกตามประเภทของสาเหตุการเกิดอุบัติเหตุทางถนน แตเปนที่เชื่อกันวาการชนทายเปนอุบัติเหตุทางถนนที่พบบอยคร้ังที่สุด ดังนั้น วัตถุประสงคของการวิจัยนี้คือ การหาแนวทางในการบรรเทาและลดความรุนแรงของการเกิดอุบัติเหตุ โดยเฉพาะอยางยิ่งอุบัติเหตจุากการชนทาย ซ่ึงในการวิจัยนี้ไดนําเสนอแนวคิดใหมที่เรียกวา การกําหนดระยะหางที่ปลอดภัยในการขับขี่และพัฒนาวิธีการคํานวณระยะหางที่ปลอดภัยในการขับขี่ สําหรับชวงความเร็ว 80 – 120 กิโลเมตรตอช่ัวโมง ซ่ึงเปนชวงความเร็วที่พบทั่วไปบนทางหลวงแผนดิน วิธีการที่พัฒนาขึ้นนี้ไดใชหลักการของ Maximum Likelihood Estimation (MLE) และ Perturbation Technique เพื่อหาระยะหางที่ปลอดภัยในการขับขี่ นอกจากนี้ในการงานวิจัยยังไดนําเสนอปายและเครื่องหมายบนผิวจราจรแบบ “DOT” Tailgating Treatment เพื่อชวยใหผูขับขี่ทราบถึงระยะหางในการขับขี่ที่ปลอดภัยดวย

Disclaimer
The contents of this report reflect only the views of the authors. Who are responsible for the facts and the accuracy of the data presented herein only. The contents do not necessarily reflect the official views or policies of the Department of Highways, Thailand. This report does not constitute any standard, specification, or regulation.

สารบัญสารบัญ
คํานํา หนา กิตติกรรมประกาศ บทคัดยอ สารบัญ สารบัญรูปภาพ สารบัญตาราง บทท่ี 1 บทนํา 1 บทท่ี 2 วรรณกรรมทบทวน 4 บทท่ี 3 วิธีการคํานวณระยะหางในการขับขี่ท่ีปลอดภัย การประมาณคาแบบจําลอง Car – following model 14 ดวยวิธี Maximum Likelihood Estimation แบบจําลอง GMS 5th Car – following model และ 14 แบบจําลองการจราจรที่สอดคลองกัน (Corresponding Traffic Stream Model) การประมาณคาพารามิเตอรของแบบจําลอง Car – following 16 Model โดยวิธี Maximum Likelihood Estimation การวิเคราะหเสถียรภาพของแบบจําลอง Car – following Model 18 สรุปวิธีการคํานวณระยะหางในการขับขี่ที่ปลอดภัย 21 บทท่ี 4 ผลการประมาณคาแบบจําลอง Car – following Model และ การประยุกต 23 ใชผลการประมาณในการหาคาระยะหางในการขับขี่ทีป่ลอดภัย ลักษณะของสถานที่เก็บขอมูล 23 ขั้นตอนการประมาณคาและผลการประมาณคาแบบจาํลอง 28
Car – following Model คําแนะนําสําหรับระยะหางในการขับขี่ที่ปลอดภัย 30 บทท่ี 5 บทสรุปการวิจัย และ แนวทางการวจัิยในอนาคต 38 เอกสารอางอิง 40 ภาคผนวก ก. ขอมูลระยะหางในการขบัรถที่ปลอดภัย 43

สาสารบัญรบัญรปูภาพรปูภาพ รูปที่ 1.1: แผนภาพแสดงองคประกอบของการขับรถตามกัน 2
รูปที่ 2.1: พฤติกรรมของ แบบจําลองทาง จิตวิเคราะห-กายภาพ 6 รูปที่ 3.1: ภาพเชิงคณิตศาสตรแสดงการขับรถตามกันอยางตอเนื่อง 19
รูปที่ 4.1: แผนที่แสดงทางหลวงที่ทําการศกึษา (ทางหลวงพิเศษหมายเลข 7) 24
รูปที่ 4.2: ภาพแสดงจุดเก็บขอมูล ณ พื้นที่ศึกษา 25 รูปที่ 4.3: ผังแสดง จุดติดตั้งเครื่องตรวจนับปริมาณการจราจร 25
รูปที่ 4.4: ภาพแสดงสถานที่ติดตั้งเครื่องตรวจนับปริมาณการจราจร 26 รูปที่ 4.5: แสดงกราฟในรูปอนุกรมเวลาของปริมาณการไหล และ ความเร็วจากพื้นที่ศึกษา 27
รูปที่ 4.6: กราฟของความเรว็-ปริมาณการไหลในพืน้ที่ศกึษา 28
รูปที่ 4.7: แสดงการเปรียบเทียบ ระยะหางที่ปลอดภัยในการขับขี่ดวยแบบจําลองชนิดตาง ๆ 31
รูปที่ 4.8: ภาพแสดงปาย และ การจัดตําแหนงของเครื่องหมายบนผวิจราจรแบบ “DOT” 34
รูปที่ 4.9: ขนาดของเครื่องหมายบนผิวจราจรแบบ “DOT” 35
รูปที่ 4.10: ระยะหางที่ปลอดภัยในการขับขี่ และ การติดตั้ง “DOT” 36
รูปที่ 4.11: เหตุผลในการปรับแกความยาวของรถยนต 37

สารบัญสารบัญตารางตาราง ตาราง 2.1: สรุปผลจากการประมาณคาเวลาการเกิดปฏิกิริยา 12
ตารางที่ 4.1: การประมาณคาพารามิเตอรของแบบจําลองการขับรถตามกันดวยวิธี 29 Maximum Likelihood

1
บทที่ 1 บทนําบทนํา
ส่ิงตาง ๆ เกิดขึ้นมากมายบนโลกนี้ อาทิ เหตุการณทางการเมือง ความซับซอนของระบบ
เศรษฐกิจโลก ความกาวหนาทางดานขอมูลขาวสารและเทคโนโลยี การพัฒนาในดานตาง ๆ เหลานี้ยังคงดําเนินไปอยางตอเนื่องทุกวันและทุกป ทั้งในปจจุบันและอนาคต ประเด็นทางสังคมที่สําคัญอันไดแก จริยธรรม สิทธิมนุษยชน สิทธิผูบริโภค การอนุรักษส่ิงแวดลอม การรักษาสุขภาพ และ การสงเสริมการศึกษาก็ยังคงเปนประเด็นที่เรงดวน ในปจจุบันการคมนาคมขนสงเปนสวนสําคัญของกิจกรรมในสังคม แตส่ิงที่นาเปนหวง คือ การขนสงที่ขาดประสิทธิภาพและความปลอดภัยจะนํามาซึ่ง การสูญเสีย การบาดเจ็บ อันเนื่องมาจาก อุบัติเหตุที่สังคมจําเปนตองแบกภาระไวไมมีใครสามารถปฏิเสธไดวาความสูญเสียดังกลาว มีมูลคามหาศาล ปจจุบันนี้ในประเทศไทยแตละปมีอุบัติเหตุทางถนนเกิดขึ้นมากกวา 100,000 คร้ัง และ มีผูเสียชีวิตถึงปละมากกวา 12,000 ราย ซ่ึงจากรายงานทางสถิติยังบงชี้วาจํานวนอุบัติเหตุยังคงเพิ่มขึ้นทุกปตามการเจริญเติบโตทางเศรษฐกิจของประเทศ ดังนั้นไมวาจะใชสูตรหรือสมการทางคณิตศาสตรใด ๆ ในการคํานวณความสูญเสียออกมาเปนตัวเงินหรือความเครียดทางจิตใจ ตนทุนทางสังคมที่แทจริงอันสืบเนื่องมาจากอุบัติเหตุทางถนนนั้น มีมูลคามาหาศาล และจําเปนตองไดรับความใสใจจากสังคม
กรมทางหลวง มีหนาที่ความรับผิดชอบในการวางแผน การออกแบบ การกอสราง และ
การบํารุงทางหลวงแผนดิน ดังนั้นจึงเปนความรับผิดชอบโดยตรงของกรมทางหลวงที่จะตองสงเสริมความมีประสิทธิภาพของการขนสงทางถนน พรอมกันนี้ก็ตองสงเสริมการอํานวยความปลอดภัยแกผูใชทางโดยทั่วไปถึง แมวาจะไมมีสถิติแยกตามประเภทของสาเหตุการเกิดอุบัติเหตุทางถนนแตก็เปนที่เชื่อกันวาการชนทายเปนอุบัติเหตุทางถนนที่พบบอยครั้งที่สุด ดังจะเห็นไดจากประสบการณการขับรถของบุคคลทั่วไปที่วา เมื่อมีขบวนของรถยนตเกาะกลุมกันอยูโดยที่รถยนตคันหนาสุดขับชา ผูขับขี่ที่ใจรอนมักจะขับขี่แบบจี้รถยนตคันหนาที่ขับชา ซ่ึงการขับขี่แบบจี้ในลักษณะนี้เปนการขับขี่ที่เสี่ยงตอการเกิดอุบัติเหตุโดยเฉพาะอยางยิ่ง การชนทายกัน ในขณะที่มีการขับขี่จี้กันนั้นระยะหยุดที่ปลอดภัยในการขับขี่ก็ลดลงไปดวย แต ถาผูขับขี่เวนระยะหางระหวางรถของตัวเองไปจนถึงรถคันหนาอยางพอเพียง แลวผูขับขี่ยอมมีเวลาในการตัดสินใจและบังคับรถไดอยางปลอดภัยในกรณีที่มีเหตุการณไมคาดคิดเกิดขึ้น
จากทฤษฎีการขับรถยนตตามกัน (Car – following theory) เปนหนึ่งในแบบจําลองที่ถูก
นํามาใชอยางแพรหลาย ในการอธิบายพฤติกรรมการขับขี่ตามกันของรถยนตในกระแสจราจร

2
ทฤษฎีนี้ถูกพัฒนาขึ้นครั้งแรกในชวงป ค.ศ. 1950 และ ยังคงไดรับการพัฒนาอยางตอเนื่องในปจจุบัน โดยทั่วไปแลว การขับขี่รถยนตตามกันบนทางตรงที่หามการขับแซงกันนั้น สามารถแยกยอยออกเปน 3 ขั้นตอนดังนี้
• การรับรู : ผูขับขี่รวบรวมขอมูลผานการมองเห็น โดยที่ขอมูลเหลานั้นไดแก การเคลื่อนที่ของรถยนตคันหนา และ รถยนตของผูขับขี่
• การตัดสินใจ : ผูขับขี่แปลขอมูลที่ไดรับจากการรับรู และ รวบรวมขอมูลดังกลาวเพื่อตัดสินใจในการบังคับรถยนต
• การควบคุม : ผูขับขี่ทําการควบคุมบังคับรถยนตโดยใชขอมูลผานการรับรู ความชํานาญและ การตัดสินใจเพื่อตอบสนองตอการเคลื่อนที่ของรถยนต
ซ่ึงทั้ง 3 ขั้นตอน สามารถแสดงเปนแผนภาพไดดังรูปที่ 1.1
รูปท่ี 1.1: แผนภาพแสดงองคประกอบของการขับรถตามกัน
ดังนั้น ถาเราเขาใจพฤติกรรมการขับขี่ตามกันไดอยางถองแท ยอมเปนไปไดที่เราจะ
สามารถหาแนวทางลดจํานวนอุบัติเหตุ หรือบรรเทาความรุนแรงของการเกิดอุบัติเหตุทางถนนไดอยางมีประสิทธิภาพโดยเฉพาะอยางยิ่งจาก อุบัติเหตุที่เกิดจากการชนทายกัน ขั้นตอนการวิจัยมีดังนี้
• ทบทวนผลงานที่เกี่ยวของกับแบบจําลองการขับรถตามกัน และ ความปลอดภัยบนทองถนน

3
• เก็บรวบรวมขอมูลภาคสนาม และ วิเคราะหขอมูลที่เก็บมาจากทางหลวงพิเศษหมายเลข 7 (กรุงเทพฯ – ชลบุรี) อาทิ ขอมูลความเร็ว และ ปริมาณการไหล เปนตน
• ปรับเทียบคาแบบจําลองการขับรถตามกัน (GM 5th car – following model) โดยใชแนวทางมหภาค (Macroscopic Approach)
• วิเคราะหเสถียรภาพของแบบจําลองการขับรถตามกันที่ไดปรับเทียบแลว • นําเสนอระยะหางที่ปลอดภัยในการขับขี่ในลักษณะของแบบแนะนําเพื่อนําไปใช
ในภาคสนามตอไป
ในสวนอื่นๆของรายงานฉบับนี้ประกอบไปดวย การทบทวนวรรณกรรมที่เกี่ยวของ อาทิ บทความที่มีเนื้อหาเกี่ยวกับ การขับรถตามกัน ความปลอดภัยบนถนน เปนตน ดังแสดงในบทที่ 2 สําหรับบทที่ 3 จะนําเสนอวิธีการปรับเทียบแบบจําลองการขับรถตามกันและการวิเคราะหเสถียรภาพของแบบจําลองโดยเทคนิคที่เรียกวา Perturbation ในบทที่ 4 จะอธิบายถึงการเก็บขอมูลบนทางหลวงพิเศษระหวางเมืองหมายเลข 7 รวมทั้งผลการปรับเทียบแบบจําลอง และ แบบแนะนําในการนําเอาผลการวิจัยไปใชจริงในรูปแบบของระยะหางที่ปลอดภัยในการขับขี่ สําหรับบทสรุปและขอเสนอแนะในการทําวิจัยตอไปในอนาคตไดนําเสนอไวในบทที่ 5 เปนสวนทาย

4
บทที่ 2 วรรณกรรมทบทวนวรรณกรรมทบทวน
ผูวิจัยไดทบทวนวรรณกรรมที่เกี่ยวของกบั แบบจําลองการขับรถยนตตามกัน และ การ
วิเคราะหเสถียรภาพของกระแสจราจร โดยนําเสนอผลการทบทวนไวดงันี้ Pipes (1953) ไดพัฒนาแบบจําลองการขับรถตามกันโดยอาศัยเกณฑในการขับขี่อยาง
ปลอดภัยของรัฐแคลิฟอเนียร ประเทศสหรัฐอเมริกาที่วา ระยะหางที่ปลอดภัยในการขับขี่ควรเวนไวอยางนอยประมาณชวงยาวหนึ่งคันรถในแตละความเร็ว 10 ไมลตอช่ัวโมง ยกตัวอยางเชน ถาขับรถยนตดวยความเร็ว 40 ไมลตอช่ัวโมง ควรเวนระยะหางที่ปลอดภัยในการขับขี่ไวที่ 4 ชวงความยาวของรถยนต จากกฎเกณฑดังกลาวนี้ ระยะเวลาที่นอยที่สุดระหวางรถยนต 2 คัน เมื่อวิ่งผานจุดอางอิงเดียวกัน (Minimum Time Headway) สามารถคํานวณไดโดยพิจารณาวาเปน ฟงกช่ันของ ความเร็วของรถยนต หรือ อยูที่ประมาณ 1.36 วินาที เมื่อทําการเปรียบเทียบกับการสังเกตภาคสนามพบวา Minimum Headway ที่ไดจากแบบจําลองของ Pipes มีคานอยกวาคาที่ไดจากสนามเล็กนอยในชวงความเร็ว 15 – 35 ไมลตอช่ัวโมง แตจะแตกตางจากคาที่ไดจากสนามเปนอยางมากในชวงความเร็วต่ําและความเร็วสูง
Forbes (1963) พิจารณาระยะเวลาตอบสนอง (Reaction time) วามีผลโดยตรงตอพฤติกรรม
การขับรถตามกัน ดังนั้นชวงเวลาระหวางกันชนทายของรถยนตคันที่นําหนา และ ชนทายของรถยนตคันที่ตามหลังควรจะตองมีคาไมนอยกวาระยะเวลาตอบสนอง นั้นหมายความวา Minimum time Headway มีคาเทากับ ระยะเวลาตอบสนอง รวมกับระยะเวลาสําหรับรถยนตคันนําหนาตองเคลื่อนที่เปนระยะทางเทากับความยาวของตัวรถยนต Forbes ทําการทดลองภาคสนามหลายครั้งพบวา Minimum Time gap มีคาแตกตางกันในแตละการทดลอง กลาวโดยสรุป แบบจําลองการขับรถตามกันของ Forbes ใหคาระยะหางในการขับขี่ที่ปลอดภัยใกลเคียงกับผลการวิจัยของ Pipes
Darroch และ Rothery (1973) นําเสนอวิธีการวิเคราะหเงื่อนไขความมีเสถียรภาพของ
แบบจําลองการขับรถตามกันแบบเชิงเสน (A Linear Car – Following Model) โดยใช การวิเคราะหสเปคตรัม (Spectral Analysis) แมวาวิธีการนี้จะไมใชวิธีใหมในการแปลงโมเดลเวลาเปนโมเดลความถี่ แตมันก็ถูกใชเปนครั้งแรกในการวิเคราะหแบบจําลองการขับรถตามกัน ในการวิจัยของ Darroch และ Rothery ไดเก็บขอมูล ความเร็ว ความเรง และ ระยะหางระหวางรถยนต จากนั้นทํา

5
การวิเคราะหหาเสถียรภาพของกระแสจราจร อยางไรก็ตามเนื่องจากความยุงยากในการคํานวณทางคณิตศาสตร วิธีการวิเคราะหสเปคตรัมจึงจํากัดอยูแคเพียงแบบจําลองการขับรถตามกันแบบเชิงเสนเทานั้น
Kohler (1973) ไดทําการตรวจสอบเงื่อนไขความมีเสถียรภาพของแบบจําลองการขับรถ
ตามกัน จากนั้น จึงพัฒนาแนวคิดการขับขี่อยางปลอดภัย ดวยการเวนระยะหางระหวางรถยนต เขาไดพิจารณาเงื่อนไขความมีเสถียรภาพของกระแสจราจรใน 2 ลักษณะ อันไดแก
1) เสถียรภาพแบบโลคอล (Local stability) และ 2) เสถียรภาพแบบแอสซิมโทติก
(Asymptotic stability) ในกรณีของเสถียรภาพแบบโลคอล การสั่นของคาความเร็วของรถยนตคันที่วิ่งตามถูกกําหนดโดยรถยนตคันที่วิ่งนําหนาอยางมีเสถียรภาพ สวนเสถียรภาพแบบแอสซิมโทตจะเกิดขึ้นก็ตอเมื่อ แอมพลิจูตการสั่นของกลุมของรถยนตหลายคันที่วิ่งตามกันมาคอยลดลง จากรถยนตคันหนึ่งไปสูรถยนตอีกคันหนึ่งในกลุมของรถยนต เมื่อรถยนตคันที่วิ่งนําหนาสุดเปลี่ยนแปลงความเร็วโดยที่การสั่นที่วานี้ หมายถึง ระยะหางระหวางรถยนต ในการวิจัยนี้ Kohler ไดปรับเทียบคาแบบจําลองการขับรถตามกันดวยขอมูลจากภาคสนาม ระยะหางที่ปลอดภัยในการขับขี่พิจารณาจาก 2 ลักษณะ ลักษณะแรกใชวิธีทางกลศาสตรของนิวตัน ลักษณะที่สองพิจารณาจากความมีเสถียรภาพของแบบจําลองการขับรถตามกันจากนั้นทําการเปรียบเทียบผลที่ไดจาก 2 ลักษณะ ซ่ึงพบวา
1. ในชวงความเร็วต่ํา ระยะทางที่ใชเบรก ส้ันกวาระยะหางที่ปลอดภัยในการขับขี่ 2. ถาจราจรเปนลักษณะกลุม (platoon) ซ่ึงแบบจําลองการขับรถตามกันสามารถอธิบาย
ได ก็ไมจําเปนตองกําหนดความเร็วสูงสุดเปนกฎเกณฑในการขับขี่ เพราะระยะหางที่ปลอดภัยในการขับขี่จะเปนตัวกําหนด
งานวิจัยของ Kohler ไดพัฒนาแนวคิดระยะหางที่ปลอดภัยในการขับขี่ อยางไรก็ตามใน
ขั้นตอนการปรับเทียบคาแบบจําลอง ใชวิธีกําลังสองนอยที่สุด (Least Square Method) ซ่ึงอาจจะไมใชวิธีการที่เหมาะสมเพื่อใหไดคาระยะเวลาในการตอบสนองซึ่งมักจะเปนตัวแปรสุม ไมใชคาคงที่

6
Leutzbach (1988) ไดแสดงใหเห็นถึงลักษณะ 2 ประการที่ไมสมจริงของแบบจําลองการขับรถตามกันของจีเอ็ม (GM Model) ไดแก 1) แบบจําลองที่สมมุติวาผูขับขี่จะขับรถตามรถยนตคันนําหนาแมวาระยะหางของรถยนตทั้งสองคันจะหางกันมากก็ตาม และ 2) การรับรู และ การตอบสนองของผูขับขี่เกิดขึ้นอยางสมบูรณแบบในระยะเวลาอันสั้น Leutzbach นําเสนอ ขอบเขตการรับรู (perception threshold) เพื่อนิยามคานอยที่สุดของสิ่งกระตุน (Stimulus) ที่ผูขับขี่จะตอบสนอง ขอบเขตการรับรูจะมีคาเพิ่มขึ้นตามระยะหางระหวางรถยนตที่เพิ่มขึ้น เมื่อระยะหางระหวางรถยนตแคบเขา และ ผูขับขี่จะไมอยูในลักษณะของการขับขี่ตามกัน เมื่อระยะหางระหวางรถยนตกวางขึ้นขอบเขตการรับรูนี้มีคาแตกตางกันไปตามการตัดสินใจเรงและชะลอรถยนต
รูปท่ี 2.1: พฤติกรรมของ แบบจําลองทาง จิตวิเคราะห-กายภาพ
รูปที่ 2.1 แสดงพฤติกรรมการขับขี่ตามกันภายใตสมมุติฐานของขอบเขตการรับรู เมื่อรถยนตวิ่งเร็วกวารถยนตคันที่อยูขางหนา จะทําใหระยะหางระหวางรถยนตทั้งสองลดลงจนขามขอบเขตการรับรูแบบชะลอ (deceleration perception threshold) ณ ตําแหนง a ในรูป ผูขับขี่จะพยายามชะลอเพื่อใหความเร็วสอดคลองกับรถยนตคันที่อยูขางหนา อยางไรก็ตามผูขับขี่ไมสามารถคาดการณไดอยางแมนยํา ทําใหระยะหางระหวางรถยนตทั้งสองเพิ่มขึ้นจนเลยขอบเขตการรับรูแบบเรง (acceleration perception threshold) ณ ตําแหนง b ในรูป ผูขับขี่จึงเรงความเร็วอีกครั้งหนึ่ง และ ขั้นตอนดังกลาวก็สามารถอธิบายไดดังรูป แบบจําลองในลักษณะนี้ สามารถอธิบายปรากฏการณการสั่นที่สังเกตไดในการทดลองการขับรถตามกัน แตอยางไรก็ตาม ไมมีการปรับเทียบแบบจําลองนี้อยางเปนกิจจะลักษณะเพื่อนํามาใชงาน

7
Subramanian (1996) นําเสนอวิธีการปรับเทียบแบบจําลองการขับรถตามกันของ จีเอ็มลําดับที่ 5 (GM 5th Car-following model) โดยใชเทคนิคทางสถิติที่เรียกวา Maximum Likelihood Estimation (MLE) ซ่ึงยังไมเคยถูกนํามาใชกอนหนานี้ ในการปรับเทียบแบบจําลอง ตัวคลาดเคลื่อน (Error Term) ถูกนํามาใสไวในแบบจําลองโดยสมมุติวามีการกระจายแบบปกติ (Normal Distribution) ซ่ึงในลักษณะนี้จะชวยใหสามารถนําวิธี MLE มาใชได ความเรงของรถยนตที่วิ่งตามหลังสามารถพิจารณาไดสองกรณีตามระยะหางระหวางรถยนตทั้งสอง เมื่อระยะหางระหวางรถยนตทั้งสองมีขนาดใหญ ผูขับขี่ของรถยนตคันที่วิ่งอยูขางหลัง จะขับขี่ดวยความเร็วที่เขาตองการ (Desired speed) ดังนั้น ความเรงของรถยนตที่ผูขับขี่ควบคุมขึ้นอยูกับ 2 กรณีคือ 1) ขับขี่ดวยความเร็วที่ตองการ และ 2) ขับขี่ในลักษณะการขับรถตามกัน โดยขอบเขตวาเมื่อไหรผูขับขี่จะขับดวยความเร็วที่ตองการ หรือขับในลักษณะการขับรถตามกันนั้น ขึ้นอยูกับระยะหางระหวางรถยนตคันที่วิ่งตามและรถยนตคันที่วิ่งนําหนาอยู ดังนั้น จึงมีความจําเปนที่จะตองกําหนดขอบเขต (threshold) เพื่อระบุวาการขับขี่จะอยูในลักษณะใด ซ่ึงขอบเขตที่วานี้ก็แตกตางกันไปตามแตละบุคคล ระยะเวลาการตอบสนองดวยเชนกันที่แตกตางกันไปตามแตละบุคคล โดยสมมุติวา มีการกระจายแบบล็อคนอรมอล (Log-Normal Distribution) แมวาวิธีการ MLE ที่นําเสนอนี้จะถูกตองตามหลักสถิติ แตตัวแบบจําลองที่กลาววาเปน จีเอ็ม ลําดับที่ 5 นั้นไมถูกตอง จึงทําใหผลการปรับเทียบนั้นไมแมนยํา
Holland (1998) ไดอธิบาย ความมีเสถียรภาพของแบบจําลองการขับรถตามกัน โดยใชทฤษฎี Perturbation Theory เพื่อหาความมีเสถียรภาพของการไหลของจราจร โดยดูจากการกอตัวของการรบกวนขนาดยอมที่ผานตลอดขบวนรถ และ แสดงใหเห็นวาแบบจําลองสวนใหญมีหลักของความมีเสถียรคลายคลึงกัน ในการหาความมีเสถียรภาพ ความรบกวนขนาดยอมจะถูกนําไปใสในสมการหลักของแบบจําลองการขับรถตามกัน ในการศึกษานี้ การรบกวนถูกสมมุติคาเปน
tin ef ωε ⋅= จากความสัมพันธการเกิดซ้ํา สําหรับรถท่ีวิ่งตามกันสองคันในโหมดของการขับรถ
ตามกัน ถาอัตราการขยายตัวของแอมพลิจูดของการสั่นนอยกวาหนึ่ง แสดงวามีเสถียรภาพแบบ Asymptotic หากไมเปนดังนี้แลว กระบวนการตามกันของรถจะไมมีความเสถียร จากการศึกษานี้มีขอเสนอแนะสี่ขอ เพื่อหลีกเลี่ยงความเสียสมดุลของการไหลของกระแสจราจร (Flow Breakdown) อันไดแก
1. ผูขับขี่ควรมองไปขางหนาในขณะขับรถ และคาดการณการเปลี่ยนแปลงปริมาณการจราจรโดยไฟเบรกดานทายรถ จะชวยเตือนผูขับขี่ที่ขับตามมาใหลดความเร็วลง
2. ผูขับขี่ตองมีปฏิกริยาที่วองไวในการตอบสนอง

8
3. ผูขับขี่ตองรักษาระยะหางในการขับขี่ตามกันไว ความสมดุลจะเกิดระหวาง การรักษาระยะหางของการขับขี่และปริมาณการไหลที่สูงที่สุด
4. ควรรักษาระดับการเปลี่ยนแปลงอัตราการไหลของจราจรใหต่ําไว ตัวอยางเชน การจํากัดความเร็วในทุกชองการจราจร เพื่อลดการเปลี่ยนชองจราจร
Winsum (1998) กลาวถึง แบบจําลองการขับรถตามกันที่มีพื้นฐานบนหลักจิตวิทยา แมวา
แบบจําลองชนิดนี้ไมไดมีการใชอยางแพรหลายเหมือนแบบจําลองการขับรถตามกันแบบจีเอ็ม (GM Car Following Model) ผูเขียนพบวาผูขับขี่พยายามที่จะรักษาระยะในการวิ่งตามรถคันหนา โดยใชชวงหางของระยะเวลา (Time Headway) ซ่ึงมีคาคงที่ในสภาพการณที่คลายคลึงกัน ดวยเหตุนี้ ผูขับขี่ใชชวงหางของระยะเวลา (Time Headway) ในการรักษาความปลอดภัยดวยการปรับการชะลอรถเพื่อใหสอดคลองกับเวลาที่จะชนกับรถคันนําหนา ดังนั้นความสัมพันธระหวางเวลาที่จะชนกันกับอัตราการเรงก็สามารถหาได แบบจําลองนี้ มีความเหมือนจริงมากกวาแบบจําลองทางคณิตศาสตรของการขับขี่ตามกัน ซ่ึงไมไดใชหลักจิตวิทยาในการจําลองผลกระทบของสภาพแวดลอม ปจจัยจากผูขับขี่ตอการไหลของการจราจร ความแออัดของกระแสจราจร และพฤติกรรมการขับขี่ตามกัน อยางไรก็ตามไมมีการรวบรวมขอมูลเพื่อปรับเทียบแบบจําลองอยางจริงจัง
Brackstone (1999) ทําการทบทวนแบบจําลองการตามกันของรถที่สําคัญไดแก 1) Gazis-
Herman-Rothery (GHR) หรือ แบบจําลอง จีเอ็ม (GM models) 2) แบบจําลองระยะทางที่ปลอดภัย หรือ แบบจําลองที่หลีกเลี่ยงการชนกัน (Safety distance or collision avoidance models) 3) แบบจําลองเชิงเสนของ Helly (Linear (Helly) models) 4) แบบจําลองตามหลักจิตวิทยา หรือ Action point models 5) Fuzzy logic-based models โดยแตละแบบจําลองดังกลาวมีเนื้อหาคราว ๆ ดังนี้
Gazis-Herman-Rothery (GHR) หรือ GM models:
เปนแบบจําลองที่ใชโดยทัว่ไป เขียนสูตรไดเปน

9
โดยเปนตนแบบของแบบจําลองการขับรถตามกัน ซ่ึงถูกคิดขึ้นมาในป 1950 โดย Chandler, Herman และ Montroll ที่ศูนยวิจัยบริษัท General Motors เมืองดีทรอยท (Detroit)โดยใชสมมุติฐานวา อัตราการเรงของผูขับขี่จะเปนสัดสวนกับความเร็วสัมพัทธ และระยะหางในการขับขี่ตามกัน ในป 1959 Gazis, Herman และ Potts พยายามหาความสัมพันธระดับมหภาค เพื่ออธิบายความสัมพันธระหวางความเร็ว และ ปริมาณการไหล ความไมถูกตองระหวางความสัมพันธมหภาคที่ไดจากสมการแบบจุลภาค ทําใหมีการแกไขดวยการเพิ่มระยะหางสัมพัทธระหวางรถยนตเขาไปดวย ในป 1960 Edie นําแบบจําลองมาปรับเทียบกับขอมูลมหภาคและพบวาจุดที่ตองแกไข คือ คาคงตัวของแบบจําลอง (sensitivity factor) จึงไดสรางแบบจําลองข้ึนมาใหมโดยใช m=1 และ l = 1 ในชวงปตอมาก็มีการทดสอบมากมายที่พยายามหาคาเหมาะสมที่สุดของ m และ 1 แบบจําลองระยะทางที่ปลอดภัย หรือ แบบจําลองที่หลีกเล่ียงการชนกัน (Safety Distance and Collision Avoidance Models) Kometani และ Sasaki (1959) ไดเสนอแบบจําลองระยะทางในการขับรถตามกันที่ปลอดภัยโดยใชสมการของการเคลื่อนที่ สูตรเปนดังนี้
พวกเขาไดปรับเทียบคาพารามิเตอรของแบบจําลอง ตอมา Gipps (1981) ไดพัฒนาแบบจําลองนี้ดวยสมมุติฐานที่วา ผูขับขี่จะยอมเพิ่มเวลาการตอบสนองที่ปลอดภัย แมวาแบบจําลองชนิดนี้จะใหผลที่ยอมรับได แตหากทําการเทียบกับแบบจําลอง simulation และ ขอมูลที่เก็บมายังพบวามีปญหาอีกมากมายที่ยังไมสามารถแกได ตัวอยางเชน สมมุติฐานของชวงระยะหางที่ปลอดภัย
constant are
factory sensitivit theis tat timecar th 1n theof velocity theis )(
tat timecar n th theof velocity theis )( tat timecar th 1n theof distance theis )(
tat timecar n th theof distance theis )( T tat timecar th 1n theof velocity theis )(
T tat timecar th 1n theofon accelerati theis )( where
)}()({)]()([
)]([)(
1
1
1
1
11
11
m, l
txtx
txtx
TtxTtx
txtxtxtx
TtxTtx
n
n
n
n
n
n
nnlnn
mn
n
α
α
+
+
++++++
−−
+=+
+
+
+
+
++
++
&
&
&
&&
&&&
&&
022
1 )()()()( btvtvTtvTtx nnln +++−=−∆ − ββα

10
(safe distance headway) นั้นไมถูกตอง เพราะผิดจากความจริงที่ผูขับขี่อาจจะพิจารณาเงื่อนไขของรถหลายคันที่วิ่งอยูขางหนา Linear (Helly) Models Helly (1959) นําเสนอแบบจําลองที่สามารถปรับคาอัตราเรงของรถยนตที่ขับตามเนื่องจากการหยุดของรถคันหนา
เมื่อ Dn(t) คือ ระยะทางการขับรถตามกันที่ตองการ ขอไดเปรียบของแบบจําลองเชิงเสนนี้คือความไมซับซอน ดวยการพิจารณาความความเร็วสัมพัทธ ระยะทางสัมพัทธ และ ความเร็วที่ตองการขับขี่ เพราะทําใหแบบจําลองนี้มีความแมนยํา และ ใชงานไดดีกวาแบบจําลองจีเอ็มแบบเดิม Psychophysical or Action Point Model (AP): Michael (1963) เสนอแบบจําลองการขับรถตามกันโดยนําปจจัยดานจิตวิทยามาพิจารณา ซ่ึงเขาพบวา ผูขับขี่สามารถบอกไดวาเขากําลังเขาใกลรถคันหนา โดยดูจากการเปลี่ยนแปลงขนาดของรถคันหนาดวยการสังเกตจากความความเร็วสัมพัทธ ตลอดจนการเปลี่ยนแปลงมุมในการมองเห็นรถคันหนา ซ่ึงหากเกินขอบเขตการรับรู (perception threshold)ไปผูขับขี่ก็จะเลือกชะลอความเร็วลง กระทั่ง เขาไมรูสึกถึงความเปลี่ยนแปลงของความเร็วสัมพัทธอีก Fuzzy Logic-Based Models: Kikuchi และ Chakroborty (1992) นําเสนอแบบจําลองการขับรถตามกันโดยใชแนวคิด fuzzy logic โดยกําหนดฟงกช่ันสมาชิก (membership function) เพื่อบอกระดับของระยะหางสัมพัทธ และ ชวงของเวลา (time headway) ระหวางรถสองคันในขณะขับขี่ตามกัน จากนั้นนําแบบจําลองไปเปรียบเทียบกับแบบจําลองจีเอ็ม (GM model) ซ่ึงพบวา แบบจําลองจีเอ็มจะใหคา time headway ที่แตกตางไป ขึ้นอยูกับอัตราการชะลอรถยนต และ ความเร็วสุดทายขณะขับขี่ นอกจากนี้ระยะหางในการขับรถตามกันขึ้นอยูกับความเร็วสุดทายโดยไมเกี่ยวของกับระยะหางตอนเริ่มตน หรือความเร็วเร่ิมตน ถึงแมวาแบบจําลองจะสะทอนการเปลี่ยนแปลงตามที่คาดไว แตรูปแบบของแบบจําลองนั้นไมใกลเคียงกับสภาพความเปนจริงในการขับรถยนตตามกัน งานวิจัยของ Ranjitkar(2000) กลาวถึงความมีเสถียรภาพของการไหลของกระแสจราจรจากพฤติกรรมของผูขับขี่ ความแปรปรวนของเวลาตอบสนอง และคาคงตัว (sensitivity factor) ของผูขับขี่แตละคน ถูกนํามาวิเคราะหตามสภาพการขับขี่ที่แตกตางกันโดยใชขอมูลที่มาจากการขับรถ
)()()( ; ))()(()()( 21 TtaTtvtDtDTtxCTtvCta nnnn −+−+=−−∆+−∆= γβα

11
ตามกันในชองวิ่งทดสอบและเก็บขอมูลดังกลาวดวยเครื่อง GPS ที่สามารถวัด การเคลื่อนที่ตามเวลาจริงได (The real time kinematics) โดยชองวิ่งทดสอบเปนทางตรงมีระยะทางยาว 1.2 กิโลเมตร เชื่อมตอกับครึ่งวงกลมที่มีความยาวชวงละ 0.3 กิโลเมตรสองสวน โดยทําการทดสอบที่หลายชวงความเร็ว โดยใหรถคันที่วิ่งนําเคลื่อนที่แบบ sinusoidal wave แบบความเร็วคงที่ และ แบบความเร็วไมแนนอน โดยใหมีรถยนตเขาทําการทดสอบเปนจํานวน 10 คันแบบเคลื่อนที่ตามกัน เวลาตอบสนอง (reaction time) จะประมาณจากกราฟระหวางอัตราเรง และ อนุกรมเวลาของความเร็วสัมพัทธ คาคงตัว(sensitivity factor) คํานวณจาก เวลาตอบสนองโดยใช regression technique ซ่ึงความมีเสถียรภาพของกระแสจราจรมีคาเทากับผลคูณของเวลาตอบสนองกับคาคงที่ (sensitivity factor) ผลการวิเคราะหพบวาเวลาการตอบสนองของผูขับขี่มีการกระจายตัวแบบ log-normal แมวาวิธีการนี้สามารถหาคาของพารามิเตอรของแบบจําลองการขับรถตามกันได แตการพิจารณาวาเวลาการตอบสนอง (reaction time) ใหเปนคาคงที่นั้นไมถูกตอง Gurusinghe (2001) แกไขแบบจําลองอันดับที่หนึ่งของจีเอ็ม (1st GM model) โดยนํามารวมเขากับแนวคิดความเร็ววิกฤต (Excess Critical Speed (ECS) Concept) โดยสมมุติวาผูขับตามใชความเร็วที่ปลอดภัย ขณะขับตามรถยนตคันหนาโดยพิจารณาจากระยะหางระหวางรถยนตในการตัดสินใจขณะขับขี่ หากผูขับตามมีอิสระในการเพิ่มความเร็วเขาจะขับอยูในชวงความเร็ววิกฤติ (Critical Speed) แตถาความเร็วเกินขีดจํากัดดังกลาว เขาจะชะลอรถเพื่อรักษาระยะหางอยางปลอดภัยกับรถคันที่วิ่งนําหนาอยู ความเร็ววิกฤตนี้ชวยปรับปรุงความแมนยําของแบบจําลองการขับรถตามกัน ทั้งยังสามารถปรับความถูกตองของแบบจําลองไดเปนอยางดีเมื่อทําการปรับแบบจําลองดวย regression กับขอมูลที่เก็บมา ผูวิจัยสรุปวา ผูขับขี่ใหความสําคัญกับระยะหางสัมพัทธมากกวาความเร็วในขณะที่เรงความเร็วแตจะใหความสําคัญกับความเร็วสัมพัทธมากกวาระยะหางสัมพัทธในขณะที่กําลังชะลอความเร็ว สรุป มีงานวิจัยมากมายที่กลาวถึงแบบจําลองการขับรถตามกัน เนื่องจากแบบจําลองขับรถตามกันนี้สามารถอธิบายการมีปฏิสัมพันธกันของรถที่วิ่งในลักษณะตามกันมาเปนหมูได นอกจากนี้ แบบจําลองการขับรถตามกันยังเปนสวนประกอบที่สําคัญของ แบบจําลองของการจราจรอีกดวย จากการทบทวนวรรณกรรมพบวา แบบจําลองการขับรถตามกันสวนใหญอธิบายอัตราเรงของรถคันที่วิ่งตามในการตอบสนองตอการเปลี่ยนแปลงการเคลื่อนที่ของรถคันที่วิ่งนําหนา แบบจําลองของจีเอ็มเปนแบบจําลองที่แพรหลายมากที่สุด ซ่ึงไดมีการพัฒนาออกมาถึง 5 รูปแบบดวยกันนับตั้งแตชวงป ค.ศ. 1950 เปนตนมา การปรับเทียบคาพารามิเตอรของแบบจําลองการขับรถตามกันสวนใหญ

12
มักใชวิธี Linear และ nonlinear regression techniques สําหรับวิธีการ Maximum likelihood ถูกนํามาใชเปนครั้งแรกโดย Subramanian (1996) เพื่อปรับเทียบแบบจําลองการขับรถตามกันใหมีความแมนยําสูง แตอยางไรก็ตาม รูปแบบของสมการที่นําเสนอโดย Subramanian (1996) นั้นไมถูกตอง ในสวนของแบบจําลองการขับรถตามกันชนิดอื่น ๆ เชน แบบจําลองทางจิตวิทยา – กายภาพ และแบบจําลอง fuzzy-logic ยังอยูในขั้นตอนการศึกษาวิจัยไมไดนํามาประยุกตใชจริง เวลาตอบสนองของผูขับขี่ในขณะขับรถตามกัน คือ เวลาที่ เหล่ือมกันระหวางการสังเกตเห็นการเปลี่ยนแปลงการเคลื่อนที่ของรถคันที่วิ่งนําหนากับการตอบสนองตอการเปลี่ยนแปลงนี้ของผูขับขี่รถยนตคันหลัง อยางไรก็ตาม จากมุมมองทางดานจิตวิทยายังมีขอแตกตางระหวาง Response Time กับ Reaction time โดยที่ Response Time ไดรวมเอาชวงเวลาตอบสนองไวแลวดวย ในขณะที่ Reaction time ไมรวมเอาชวงเวลาตอบสนอง มีงานวิจัยหลายงานที่ไดพยายามประมาณคาเวลาตอบสนองนี้ ซ่ึงผลสามารถสรุปไดดังตารางที่ 2.1 โดยปรากฏวาคาเฉลี่ยของระยะเวลาในการตอบสนองสวนใหญมีคานอยกวาหรือเทากับ 1.50 วินาที
ตาราง 2.1: สรุปผลจากการประมาณคาเวลาการเกิดปฏิกิริยา
การศึกษา เวลาในการตอบสนองเฉลี่ย (วินาที)
Ranjikar et.al (2002) 1.23- 1.33 Gurusinghe et.al (2001) 1.50 Fambro et al (1998), Review 1.28 Fambro et al (1998) 1.10 Lerner et al (1995) 1.31 Ahmed (1999) 1.34 ความมีเสถียรภาพของการจราจรในแบบจําลองการขับรถตามกัน ไดนํามาวิเคราะหและแบงไดเปนสองประเภท ไดแก 1) ความมีเสถียรภาพแบบ Local และ 2) ความมีเสถียรภาพแบบ Asymptotic ความมีเสถียรภาพแบบ Asymptotic มีการกลาวถึงในวรรณกรรมทบทวนมากกวา เนื่องจาก สามารถหาการเกิดปฏิสัมพันธระหวางรถแตละคันในกลุมได วิธีการแปลงแบบลาปลาซ (Laplace Transforms Technique) ไดถูกนํามาประยุกตใชในการหาความมีเสถียรภาพของการจราจรไดแตก็ยังมีขอจํากัดที่สามารถใชไดเฉพาะกับแบบจําลองเชิงเสนของการขับรถตามกันเทานั้น กลาวโดยสรุปแลว แบบจําลองการขับรถตามกันอันดับที่หาของจีเอ็ม (GM5th) ถาไดรับการปรับเทียบอยางถูกตอง จะเปนตัวแทนที่ดีในการอธิบายความสัมพันธของกลุมรถยนตที่วิ่งใน

13
ลักษณะขับรถยนตตามกัน ในบทที่ 3 จะแสดงถึงวิธีการปรับเทียบแบบจําลองอันดับที่หาของจีเอ็ม (GM5th) โดยใชแนวทางมหภาค

14
บทที่ บทที่ 33 วิธีการดําเนินการวิธีการดําเนินการ
ในบทนี้แสดงวิธีการปรับเทียบแบบจําลองการขับรถตามกันแบบจีเอ็มอันดับที่5 (GM5th )โดยใชการประมาณคาดวยวิธี Maximum Likelihood (MLE) โดยปกติแลวเราสามารถหาความสัมพันธระหวางแบบจําลองการขับรถแบบตามกันและแบบจําลองการไหลของจราจรได ในที่นี้ เราสรางแบบจําลองการไหลของจราจรแบบมหภาคที่สอดคลองกับแบบจําลองการขับรถตามกันของ GM5th จากนั้นจะทําการปรับเทียบแบบจําลองโดยใสตัวคลาดเคลื่อน (Error Term) เขาไปในสมการการไหลของจราจรโดยสมมติวาตัวคาดเคลื่อนนี้มีการกระจายแบบปกติ ในขั้นตอนที่ 2 ใชวิธีที่เรียกวา perturbation technique ในการตรวจสอบความมีเสถียรภาพของกระแสจราจร ในบทนี้ประกอบไป ดวย 3 สวน โดยสวนแรกแสดงวิธีการปรับเทียบแบบจําลองการขับรถตามกัน สวนที่ 2 เปนการวิเคราะหความมีเสถียรภาพที่เหมาะสมของแบบจําลองการขับรถตามกัน เพื่อนํามาประยุกตหาระยะหางในการขับขี่ที่ปลอดภัย และสวนสุดทายของบทนี้เปนบทสรุป 3.1 การประมาณคาแบบจําลอง Car-following model ดวยวิธี Maximum Likelihood Estimation ในสวนนี้แสดงแบบจําลองการขับรถตามกันโดยใชแบบจําลอง GM5th ที่นํามาดัดแปลงเพื่อใหวิธี Maximum Likelihood Estimation สามารถใชในการปรับเทียบคาพารามิเตอรได 3.1.1 แบบจําลองการตามกันของรถ GM5th และ ความสัมพันธกับแบบจําลองการไหลของการจราจร จากระบบสัญลักษณที่เราใชในวรรณกรรมทบทวน สมการของแบบจําลองการขับรถตามกันสามารถเขียนไดเปน (1) เราสมมุติใหความเรงของผูขับขี่ที่วิ่งตามหลัง ณ เวลา t ใด ๆ เปนสัดสวนกับความเร็วสัมพัทธ ระหวางรถนําหนา และ รถที่วิ่งตามหลัง โดยที่ ณ เวลา t คาคงตัว (sensitivity factor) เปน
)()(
)()( nnnn
ntn TtV
TtXtVta −∆
−∆⋅
= γ
βα

15
constant.)n integratioan is (C ; 11
1 11 Csv +⋅−
=⋅−
−− γβ
γα
β
ฟงกช่ันของความเร็วรถคันที่กําลังพิจารณาอยู และ ระยะหางระหวางรถคันที่วิ่งตามกับรถคันที่นําหนา โดยที่ Tn เปนเวลาการตอบสนองของผูขับรถคันที่ n สมมุติใหการจราจรอยูในภาวะที่มีความเสถียร สมการที่ 1 สามารถเขียนใหมไดเปน: (2) อินทิเกรตสมการที่ 2 ได
แทนคา 1/k ใน s โดยที่ความหนาแนนของการจราจรเปนสวนกลับของคาเฉล่ียของระยะหางระหวางรถยนตแตละคัน (3) ซ่ึงประกอบดวย 2 เงื่อนไข
(1) density) (jammed 0 jkkv =⇒= : (รถติด) (2) speed) flow-(free 0 fvvk =⇒= : (ความเร็วอิสระ)
โดยใช2 สมการนี้ในการแกหาคา C
parameters model following-car , ,
statesteady at headway distance the
state steadat trafficof speed the
=
=
=
⋅⋅
=
γβα
αγ
β
s
v
dtds
sv
dtdv
เมื่อ
Ckv +⋅−
=⋅−
−− 11
111 γβ
γα
β

16
11 1
1
1
1
11
fj
f
j
kv vk
vk
γ β
β
γ
γαβ
− −
−
−
⎡ ⎤⎛ ⎞⎢ ⎥= ⋅ − ⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
−= ⋅
−
(4)
สมการที่ 4 แสดงใหเห็นถึงความสัมพันธระหวางความเร็ว และ ความหนาแนน โดยสมการ
จะถูกตองเมื่อ 0 ≤β< 1 และ γ>1 ถาเราทราบคาเวลาในการตอบสนอง (reaction time) ของผูขับขี่อยูกอนแลว สมการที่ 4 ก็สามารถนําไปใชในการปรับเทียบพารามิเตอรของแบบจําลองการขับรถตามกันได โดยใชขอมูลของการจราจรมหภาค (macroscopic traffic data) เชน ความเร็ว และ ความหนาแนน โดยท่ัวไปแลว เวลาในการตอบสนองของผูขับขี่จะแตกตางกันไปในแตละคน ถึงแมวาตามทฤษฎี จะมีความเปนไปไดที่จะไดคาเฉลี่ยของเวลาการตอบสนองของผูขับขี่ผานกระบวนการปรับเทียบโดยใชขอมูลจุลภาค (microscopic traffic data) เชน ความเร็ว และ ความเรงของรถแตละคันใน แตก็เปนการยากที่จะเก็บขอมูลระดับจุลภาคกับรถยนตทุกคันในกระแสจราจร ดังนั้น คาเฉล่ียของเวลาในการตอบสนองที่ปรับเทียบจากรถเพียงสองหรือสามคันในการทดลองจึงไมใชตัวแทนที่ดีของระบบจราจรทั้งหมด ในการศึกษานี้ คาของเวลาในการตอบสนองที่ใชจะนํามาจากงานวิจัย และ บทความอื่นๆตามที่คนความาจากการทบทวนวรรณกรรม 3.1.2 การประมาณคาพารามิเตอรการขับรถตามกันดวย Maximum Likelihood ความสัมพันธระหวางความเร็ว-ความหนาแนน ของการจราจรที่ไดมาจากแบบจําลองการขับรถตามกันของ GM5th สามารถเขียนใหมไดเปน (5) โดยที่
density jammed theis k
speed flow-free theis v
interval observed i the toingcorrespond error term theis
interval observed th i at the stream trafficofdensity average theis
interval observed th i at the stream trafficof speed average theis
j
f
thi
i
i
k
v
ε
ij
ifi k
kvv εβγ
+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅=
−− 11
1
1

17
เมื่อตัวคลาดเคลื่อน (error term) ถูกสมมุติใหมีการกระจายแบบปกติ (Normal Distribution) (6)
⎩⎨⎧ =
= otherwisejiif
ji 0 ),(coυ
2σεε (7)
ดังนั้น likelihood function ของขอมูล N ชุด คือ ผลคูณของสมการที่ (6) เปนจํานวน N คร้ังตามคาของขอมูลแตละชุด เขียนเปน log likelihood ไดดังนี้
(8)
จากนั้นหาคามากที่สุดของ ln L(-) เพื่อประมาณคาพารามิเตอร 2,,,, σγβ jf kv ของแบบจําลอง ในการคํานวณหาคาเบี่ยงเบนมาตรฐาน (standard error) ของพารามิเตอรแตละตัวจะใช information matrix ที่หามาจากความสัมพันธของ Log-likelihood function ซ่ึงจะใหคาขอบลางของ
222
1
21)(
],0[~
2
2
ief
N
i
i
εσ
πσε
σε
−
⋅=
)kkvv
σ(
)πσ(
)kkvv
σ(
πσ
kvffkvL
βγ
j
ifi
N
iN
N
i
βγ
j
ifi
N
i
N
iiiijf
2
11
1
21 22
1
2
11
1
22
1 1
2
12
1exp2
1
12
1exp21
),( )( ),,,,(
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅−⋅=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅−⋅=
==
−−
=
=
−−
= =
∏
∏
∏ ∏εσγβ
2
1
11
1
222 1
21)2ln(
2),,,,(ln ∑
=
−−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−−⋅−−=
N
i
βγ
j
ifijf k
kvvNkvLσ
πσσγβ

18
คาเบี่ยงเบนมาตรฐาน (standard error) ของพารามิเตอรแตละตัว หลังจากทําการปรับเทียบพารามิเตอรของแบบจําลองการขับรถตามกันแลว ก็จะวิเคราะหสภาวะความมีเสถียรภาพของการจราจรตอไป 3.2 การวิเคราะหเสถียรภาพของแบบจําลองการขับรถตามกัน การขับรถตามกันอยางกระชั้นชิดอาจกอใหเกิดผลเสียอยางรายแรง เมื่อกลุมของรถยนตเร่ิมเขาใกลกันมากขึ้น อันเปนผลมาจากพลศาสตรของกลุมรถที่มีตอระยะหางสัมพัทธ ถาหากรถคันที่นําหนาของกลุมรถเหลานี้คอยๆลดความเร็วลง และ กลับไปสูความเร็วเดิมอีกครั้ง รถคันถัดมาอาจตอบสนองดวยการลดความเร็วอยางรวดเร็ว (ขึ้นกับพารามิเตอร เชน ระยะเวลาในการตอบสนอง และ ระยะหาง) รถคันที่สามก็จะลดความเร็วลงอยางรวดเร็วขึ้นตามรถคันกอนหนา ดังนั้นหากพิจารณารถแตละคันไลลงไปเรื่อยๆจะพบวา อัตราการชะลอของรถที่รุนแรงมากขึ้น จนกระทั่งเกินความสามารถที่จะหยุดรถไดทันทวงที สําหรับกลุมรถที่มีความยาวเพียงพอการชนทายกันของรถยนตภายในกลุมยอมเปนสิ่งที่หลีกเลี่ยงไมได
รูปที่ 3.1 แสดงผลจากแบบจําลองทางคณิตศาสตรของสถานการณของที่กลุมรถวิ่งตามกันมาโดยใชความเร็วเทากัน และ มีระยะหาง 40 ฟุตเทาๆกัน ตําแหนงของรถแตละคันจะมีความสัมพันธกับตําแหนงของรถคันแรก (labeled 1) สมมุติวา รถคันแรกนี้วิ่งไปดวยความเร็วคงที่ เมื่อเวลาที่ศูนยรถคันแรกลดความเร็วลงแลวกลับไปใชความเร็วเดิมใหม จะไดเสนกราฟที่แสดงการตอบสนองของรถที่วิ่งตามกันมา จากกราฟของรถที่วิ่งตามกันพบวา รถแตละคันจะเขาใกลไปชิดกับรถคันขางหนาไปเรื่อยจนกราฟตัดกันที่แนวการวิ่งของรถคันที่ 7 และ 8 หรือ อีกนัยหนึ่งก็คือ รถคันที่ 8 ไดชนทายรถคันที่ 7 นั่นเอง

19
รูปท่ี 3.1: ภาพเชิงคณติศาสตรแสดงการขบัรถตามกันอยางตอเนื่อง
จากตัวอยางนี้ แสดงใหเห็นถึงความไมมีเสถียรภาพของภายในแถวการขับรถตามกัน หากคนขับแตละคนเวนระยะหางในการขับขี่ตามกันอยางพอเพียงก็จะสามารถลดผลกระทบลงได ซ่ึงการชนกันก็จะไมเกิดขึ้นโดยทั่วไปการวิ่งตามกันเปนลําดับดวยระยะหางที่ไมเหมาะสมของรถภายในกลุมอาจทําใหเกิดการชนทาย ซ่ึงเปนหนึ่งในอุบัติเหตุที่เกิดขึ้นมากที่สุดในประเทศไทย ระยะหางที่ไมเหมาะสมเปนผลมาจาก ความไมระมัดระวังในการขับขี่และบางสวนมาจากความผิดพลาดของผูขับขี่ในการรักษาระยะหางใหสอดคลองกับความเร็ว ดังนั้น ความปลอดภัยในการจราจรจะเพิ่มขึ้นถาผูขับขี่ไดรับขอมูลเกี่ยวกับระยะการขับรถตามกันที่ปลอดภัย ในสวนนี้ สูตรที่ใชในการประมาณคาระยะหางในการขับตามกันที่ปลอดภัยที่ชวยประกันความมีเสถียรภาพแบบ Asymptotic ของกระแสจราจรจะถูกสรางขึ้น เหตุการณที่รถคันหนึ่งขับตามรถคันอื่น จะมีเสถียรภาพ หรือ ไมมีเสถียรภาพนั้น ขึ้นอยูกับคาพารามิเตอรในแบบจําลองการขับรถตามกัน โดยจะมีเสถียรภาพแบบ Asymptotic ถาแอมพลิจูดของระยะหางระหวางรถยนตแตละคันในกลุมของรถยนตลดลงจากคันสูคันเมื่อมีการเปลี่ยนการเคลื่อนที่ของรถคันหนา โดยปกติแลวความแปรปรวนจากการขับขี่ จะทําใหเกิดความแปรปรวนตอ

20
ระยะหางระหวางรถยนตดวย พฤติกรรมที่ไมมีเสถียรภาพภายในกลุมรถจะทําใหเกิดการชนกันโดยเปนฟงกช่ัน ของระยะหางระหวางรถขณะเริ่มตน ในการศึกษานี้ใช Perturbation Technique ในการวิเคราะหความมีเสถียรภาพของแบบจําลองการขับรถตามกัน สมการหลักของแบบจําลองการขับรถตามกัน(1) สามารถเขียนไดดังนี้ (9) การตรวจสอบความมีเสถียรภาพเรารบกวนสมการ ดวยตัวเบี่ยงเบน ε ดังแสดง ),()( tntvnbtX n ε+⋅+⋅= (10) เมื่อ
condition statesteay thefromdeviation theis
statesteady at stream trafficof speed theis v
statesteady at vehicleseconsecutiv obetween tw distance average theis b
tat time len th vehic theof distance traveled theis )(
ε
tX n
การวิเคราะหขนาดเปรียบเทยีบ (relative magnitude) ของระยะหางระหวางรถยนตสองคัน
ในระหวางการขับตามกัน เราสมมุติ tin eftn ωε ⋅=),( แทนคาสมการที่ 10 ในสมการที่ 9 จะไดผล
ดังตอไปนี้ ใชสูตรของออยเลอร (Euler Formula)
))()(())()(()()( 1
1
11 tXtX
tXtXTtXTtX nn
nn
nn +
+
++ −
−+
=+ &&&
&&γ
βα
λωλ
ωλω
αλεελε
εεαε
εεεε
εαε
ω
ωωω
γ
β
γ
β
γ
β
+⋅=
=−=⋅
⋅+−=++
+−⋅
=++
+−+−++++⋅
=++
+
++
Tin
n
itωnnn
titin
Ti
eiff
efε(n,t)ffeiefie
bvtntnTtn
tntnb
vTtn
tntntntnb
TtnvTtn
1
112 . since )]()[()(
][][ as Define )},1(),({),1(
)},1(),({][
][),1(
)},1(),({)],1(),([
)],1([),1(
&&&&
&&&&
&&&
&&

21
ใหลิมิตของ ω เขาใกลศูนย ความมีเสถียรภาพของกระแสจราจรจะเกดิขึ้นเมื่อ
(11) หรือ
จากหลักการของ Perturbation Technique ความมีเสถียรภาพของแบบจําลองการขับรถตามกันGM 5th ไดถูกพัฒนาขึ้น โดยสมการที่ 11 คือ สภาวะความมีเสถียรภาพ ซ่ึงใชนํามาตรวจสอบความมีเสถียรภาพของกลุมรถยนตใดๆโดยประกันวากระแสจราจรจะมเีสถียรภาพแบบ Asymptotic 3.3 สรุป ในสวนนี้เราไดทําการพัฒนากรอบความคิด เพื่อปรับเทียบแบบจําลองการขับรถตามกันโดยใชเทคนิค Maximum Likelihood ที่สามารถนําไปประยุกตใชกับแบบจําลองการขับรถตามกันแบบอื่นๆ ที่ตองการการปรับเทียบได การวิเคราะหความมีเสถียรภาพของแบบจําลองการขับรถตามกัน GM5th โดยใช Perturbation Technique ไดถูกพัฒนาขึ้น ความมีเสถียรภาพนี้มีความสําคัญอยางมาก ในการวิเคราะหการเกิดอุบัติเหตุแบบการชนทาย ในบทถัดไป จะอธิบายขั้นตอนการเก็บขอมูลภาคสนาม และ จะแสดงผลจากการปรับเทียบแบบจําลองการขับรถตามกัน จากนั้น ระยะหางใน
λωω
ωωλω
ωωωωωλω
ωωωωλλ
λωωωωλ
λωωωλ
2Tsin
sin2
cossinsin2
1)cos()sin(
;1
sincos
)sin(cos
2
2222
22
21
1
1
≤
≤
+≤
≤+−
≤
+−=
+⋅+⋅=
+
+
+
T
TTT
TTff
TTiff
TiTiff
n
n
n
n
n
n
21
21
'
≤⋅⋅
≤⋅
Tb[v]α
T
γ
β
λ

22
การขับขี่ตามกันที่ปลอดภัยภายใตความมีเสถียรภาพของกระแสจราจรมาคํานวณโดยพิจารณาเปนฟงกช่ันของความเร็วของกระแสการจราจร

23
บทที่ บทที่ 44 ผลลัพธจากการปรบัเทียบ และ การนําไปประยกุตใชผลลัพธจากการปรบัเทียบ และ การนําไปประยกุตใช
ในบทนี้จะแสดงผลลัพธจากการปรับเทียบแบบจําลองการขับรถตามกันอันดับที่5 ของจีเอ็ม(GM5th)โดยใชขอมูลการจราจรมหภาค อาทิ ความเร็ว การไหลของจราจร และ ความหนาแนน วิธีการปรับเทียบโดยใช Maximum Likelihood Technique ซ่ึงไมเพียงแตจะใหคาเฉลี่ยของพารามิเตอรไดเทานั้น แตยังสามารถหาคาเบี่ยงเบนมาตรฐาน (Standard Errors) ของพารามิเตอรไดอีกดวย โดยใชขอมูลที่เก็บจากภาคสนามมาทําการปรับเทียบแบบจําลองการขับรถตามกัน ในบทนี้ประกอบดวยสามสวน สวนแรกกลาวถึงพื้นที่ศึกษา และ แนวทางการเก็บขอมูล สวนที่สองจะใหรายละเอียดของผลลัพธจากการปรับเทียบของแบบจําลองการขับรถตามกันแบบจีเอ็ม(GM5th) โดยใชวิธี Maximum Likelihood และ ในสวนสุดทาย แสดงคาระยะหางในการขับขี่ตามกันที่ปลอดภัย ซ่ึงมีความสัมพันธกับความเร็วของกระแสการจราจร 4.1 พื้นที่ท่ีทําการเก็บขอมูล ทางหลวงพิเศษหมายเลข 7 ถูกเลือกเปนพื้นที่ศึกษาในการวิจัยนี้เนื่องจากมีปริมาณรถ และ ความเร็วของกระแสการจราจรสูง ทางหลวงนี้มีช่ือเรียกอีกอยางหนึ่งวา มอเตอรเวยชลบุรี ซ่ึงเปนเสนทางหลวงสายหลักทางทิศตะวันออกของกรุงเทพฯ รองรับการเดินทางในระดับทองถ่ิน ระดับภาค และ ระดับประเทศ เสนทางตลอดสายแบงทิศทางการจราจรดวย เกาะกลางถนนที่ปลูกหญา (Grass Medians) มีการจํากัดความเร็วไวที่ 120 กม/ชม สําหรับรถยนตนั่งสวนบุคคล, 100 กม/ชม สําหรับรถบรรทุก และ 80 กม/ชม สําหรับรถพวง ปริมาณการจราจรบนทางหลวงพิเศษ จะหนาแนนมากในชั่วโมงเรงดวนตอนเชา และ บายของชวงสุดสัปดาห ซ่ึงเปนเรื่องไมผิดปกติเลยท่ีความหนาแนนของการจราจรจะคงอยูเปนเวลาหลายชั่วโมง

24
รูปท่ี 4.1: แผนที่แสดงทางหลวงที่ทําการศึกษา (ทางหลวงพิเศษหมายเลข 7)
จุดที่ทําการเก็บขอมูลอยูใกลจุดพักรถ ใกลทางแยกตางระดับบางปะกงที่กิโลเมตร 50+000
มุงหนาไปยังชลบุรี โดยมีสองชองจราจรในทิศทางที่มุงสูตะวันออก และติดตั้งเครื่องตรวจนับปริมาณการจราจร ที่ระยะหางประมาณ 200 เมตรจากชองจราจรสําหรับเรงความเร็ว

25
รูปท่ี 4.2: ภาพแสดงจุดเก็บขอมูล ณ พื้นท่ีศึกษา
รูปท่ี 4.3: ผังแสดง จุดติดตั้งเคร่ืองตรวจนบัปริมาณการจราจร
Detector Location

26
รูปท่ี 4.4: ภาพแสดงสถานที่ติดตั้งเครื่องตรวจนับปริมาณการจราจร
เครื่องตรวจนับปริมาณจราจรสามารถเก็บขอมูล ความเร็ว ปริมาณการไหลการจราจร ความหนาแนน และ สัดสวนของรถบรรทุกหนัก ทุกชวง 5 นาทีไดอยางตอเนื่อง ชุดของขอมูลที่สมบูรณที่ไดจากการเก็บมีอยู 2 วัน (วันที่ 23-24 มีนาคม และ วันที่ 12-13 เมษายน 2549) ความเร็วที่การไหลอิสระ (free-flow speed) ในชวงนอกเวลาเรงดวนอยูที่ 95 กิโลเมตร ตอ ช่ัวโมง สัดสวนรถบรรทุกขนาดใหญบริเวณพื้นที่คือประมาณ 5 เปอรเซ็นต โดยปกติจุดที่ทําการเก็บขอมูลมักจะไมมีรถติด ความแปรเปลี่ยนของปริมาณการจราจรและความเร็วที่เกิดขึ้นตลอดระยะเวลาในการเก็บขอมูล สงผลใหไดอัตราไหลของการจราจรที่แตกตางกัน

27
Time Series Plot of Speed and Flow Data of the Traffic on the National Motorway 7 km 50+000 toward Chon Buri on March 23-24, 2006
0
200
400
600
800
1000
1200
1400
1600
1800
[10:
30 A
M-1
0:35
AM
] [1
1:15
AM
-11:
20 A
M]
[12:
00 P
M-1
2:05
PM
] [1
2:45
PM
-12:
50 P
M]
[01:
30 P
M-0
1:35
PM
] [0
2:15
PM
-02:
20 P
M]
[03:
00 P
M-0
3:05
PM
] [0
3:45
PM
-03:
50 P
M]
[04:
30 P
M-0
4:35
PM
] [0
5:15
PM
-05:
20 P
M]
[06:
00 P
M-0
6:05
PM
] [0
6:45
PM
-06:
50 P
M]
[07:
30 P
M-0
7:35
PM
] [0
8:15
PM
-08:
20 P
M]
[09:
00 P
M-0
9:05
PM
] [0
9:45
PM
-09:
50 P
M]
[10:
30 P
M-1
0:35
PM
] [1
1:15
PM
-11:
20 P
M]
[12:
00 A
M-1
2:05
AM
] [1
2:45
AM
-12:
50 A
M]
[01:
30 A
M-0
1:35
AM
] [0
2:15
AM
-02:
20 A
M]
[03:
00 A
M-0
3:05
AM
] [0
3:45
AM
-03:
50 A
M]
[04:
30 A
M-0
4:35
AM
] [0
5:15
AM
-05:
20 A
M]
[06:
00 A
M-0
6:05
AM
] [0
6:45
AM
-06:
50 A
M]
[07:
30 A
M-0
7:35
AM
] [0
8:15
AM
-08:
20 A
M]
[09:
00 A
M-0
9:05
AM
] [0
9:45
AM
-09:
50 A
M]
Time
Flow
(veh
/h/ln
)
0
20
40
60
80
100
120
140
Spee
d (k
m/h
)
Flow Rate
Avg Speed (km/h)
Time Series Plots of Speed and Flow Data on the National Motorway 7 km 50+000 toward Chon Buri on April 12-13, 2006
0
200
400
600
800
1000
1200
1400
1600
1800
2000
[07:
00 A
M-0
7:05
AM
] [0
7:45
AM
-07:
50 A
M]
[08:
30 A
M-0
8:35
AM
] [0
9:20
AM
-09:
25 A
M]
[10:
05 A
M-1
0:10
AM
] [1
0:50
AM
-10:
55 A
M]
[11:
35 A
M-1
1:40
AM
] [1
2:20
PM
-12:
25 P
M]
[01:
05 P
M-0
1:10
PM
] [0
1:50
PM
-01:
55 P
M]
[02:
35 P
M-0
2:40
PM
] [0
3:20
PM
-03:
25 P
M]
[04:
10 P
M-0
4:15
PM
] [0
4:55
PM
-05:
00 P
M]
[05:
40 P
M-0
5:45
PM
] [0
6:25
PM
-06:
30 P
M]
[07:
10 P
M-0
7:15
PM
] [0
7:55
PM
-08:
00 P
M]
[08:
40 P
M-0
8:45
PM
] [0
9:25
PM
-09:
30 P
M]
[10:
10 P
M-1
0:15
PM
] [1
0:55
PM
-11:
00 P
M]
[11:
40 P
M-1
1:45
PM
] [1
2:25
AM
-12:
30 A
M]
[01:
10 A
M-0
1:15
AM
] [0
1:55
AM
-02:
00 A
M]
[02:
40 A
M-0
2:45
AM
] [0
3:25
AM
-03:
30 A
M]
[04:
15 A
M-0
4:20
AM
] [0
5:00
AM
-05:
05 A
M]
[05:
45 A
M-0
5:50
AM
] [0
6:30
AM
-06:
35 A
M]
[07:
15 A
M-0
7:20
AM
] [0
8:00
AM
-08:
05 A
M]
Time
Flow
(veh
/hr/l
n)
0
20
40
60
80
100
120
Spee
d (k
m/h
)
Flow (veh/h)Speed (km/h)
รูปท่ี 4.5: แสดงกราฟในรปูอนุกรมเวลาของปริมาณการไหล และ ความเร็วจากพื้นท่ีศึกษา
นอกจากนี้ ยังไดสรางกราฟความเร็ว-อัตราการไหล และ นํามาใชในการปรับเทียบแบบจําลองการตามกันของรถแบบจีเอ็ม ความเร็วของการไหลอิสระของจุดที่ศึกษามีคาประมาณ 95

28
Speed-Flow Curve of the Traffic on the National Highway 7 toward Chon Buri
0.0
20.0
40.0
60.0
80.0
100.0
120.0
140.0
0 200 400 600 800 1000 1200 1400 1600 1800
Flow Rate (veh/h/ln)
Spee
d (k
m/h
)
กม/ชม โดยมีคาอัตราการไหลสูงสุดที่เก็บได 1700 คัน/ชม/ชองจราจร อยางไรก็ตาม สภาพการจราจรที่มีความหนาแนนไมสามารถสํารวจพบไดขณะทําการเก็บขอมูล
รูปท่ี 4.6: กราฟของความเร็ว-ปริมาณการไหลในพื้นท่ีศึกษา
4.2 การปรับเทียบแบบจําลองและผลลัพธของการปรับเทียบ ในสวนนี้แสดงการปรับเทียบแบบจําลองการขับรถตามกันแบบจีเอ็มโดยใชขอมูลการจราจรมหภาค อาทิ ความเร็ว และ ความหนาแนน จากที่กลาวไวในบทกอนหนา เกี่ยวกับความสัมพันธของ ความเร็ว-ความหนาแนน ที่หามาไดจากแบบจําลองการขับรถตามกันของ GM5th สามารถเขียนไดเปน โดยการนําตวัคลาดเคลื่อน (error term) ใสเขาไปในความสัมพันธ ก็สามารถเขียนเปน log-likelihood ไดดังนี ้
∑=
−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−⋅−−=
N
i
βγ
j
ifijf ])
kk([vv
σ)πσ(N),,k L(v
1
2
11
12
22 1212ln
2,,ln σβγ
βγ −−
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅=
11
1
1j
ifi k
kvv

29
เมื่อ
parameters following-car5th GM theare ,mserror ter of variance theis
density jammed theis kspeed flow-free theis v
interval observed th i at the stream trafficofdensity average theis
interval observed th i at the stream trafficof speed average theis
2
j
f
βγσ
i
i
k
v
จากการประมาณโดย Maximum Likelihood Technique คาพารามิเตอรที่หามาได จะทําให
Likelihood Function มีคาสูงสุด ผลการประมาณแสดงไวในตารางที่ 4.1 คาเบี่ยงเบนมาตรฐาน (Standard Error) ของพารามิเตอรแตละตัว จะประมาณโดยใช Cramer-Rao Lower Bound ซ่ึงจะใหคาขอบลางของความแปรปรวน (variance) ของตัวประมาณคาที่ไมอคติ (Unbiased) ใดๆ
เมื่อ
ตารางที่ 4.1: การประมาณคาพารามิเตอรของแบบจําลองการขับรถตามกนัดวยวิธี Maximum Likelihood
ตัวแปร คาเฉล่ีย คาเบี่ยงเบนมาตรฐาน t-ratio
σ2 33.646 2.238 15.034
vf 95.716 0.080 1,196.450
kj 116.067 1.482 78.318
γ 4.510 0.042 107.143
β 0.990 0.00002 49500.000
1
2
1
}ˆ)ˆlnL(X;{E
)}ˆ;({)ˆ(
−
−
⎥⎦
⎤⎢⎣
⎡
∂∂
=
=
θθ
θθ XIVAR
estimator likelihoodmaximum theˆ
ˆat valuelikelihood -log the)ˆlnL(X;
operatorn expectatio the)(
=
=
=•
θ
θθ
E

30
ส่ิงที่เห็นไดชัดจากผลลัพธ คือ คาพารามิเตอรแตละตัวมีคาไมเทากับศูนย ดวยระดบัความ
เชื่อมั่น 95% โดยที่ t-ratios มีคามากกวา 1.96 ความเร็ว ณ ปริมาณการไหลอิสระมีคาประมาณ 96
กม/ชม ความหนาแนนแบบติดขัด (jammed density) มีคาเทากับ 116 คัน/กม/ชองจราจร ซ่ึง
เทียบเทากับ ระยะหางต่ําสุดของรถ (minimum distance headway) ที่ 8.6 เมตร กระนั้นกย็ังตองการ
ขอมลูเพิ่มเติมอีกมากเพื่อประมาณคาความหนาแนนแบบติดขัดใหมีความแมนยํา เพราะวาการศึกษา
นี้ใชขอมูลที่เกบ็มาจากสภาพการจราจรที่มคีวามหนาแนนต่ํามาปรับเทยีบแบบจําลองเทานั้น
4.3 ระยะหางในการขับขีต่ามกันที่ปลอดภัย
จากที่กลาวไวในหวัขอที่ 3.2 ความมีเสถียรภาพในแบบจาํลองการตามกันของรถ GM5th
สามารถเขียนไดเปน
โดยที ่ 1
1
11
−
−
⋅−−
=γ
β
βγα
j
f
k
v
การกําหนดระยะหางที่ปลอดภัยในการขับรถตามกัน โดยใชคาปรับเทียบแบบจําลอง GM5th สามารถคํานวณโดยการหาคา b ในสมการที่ (14) สําหรับความเร็วตาง ๆ ในการศึกษานี้ สมมุติใหเวลาในการตอบสนองของผูขับขี่ คือ 1.5 วินาที (เปนคาที่ไดจากวรรณกรรมทบทวน) รูปที่ 4.7 แสดงการเปรียบเทียบคาระยะหางในการขับขี่ที่ปลอดภัยดวยแบบจําลองชนิดตาง ๆ
21 ≤⋅
⋅ Tb[v]αγ
β

31
Following Distances Based on Different Car-Following Models
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140
Speed (km/h)
Follo
win
g D
ista
nce
(m)
Pipes'Forbes'Calibrated GM2-second Rule
Safe Following Distance (m)
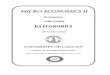
Speed (km/h) Pipes'* Forbes'* Calibrated GM 2-second Rule 0 5.00 5.00 0.00 0.00 10 8.13 9.17 31.52 5.56 20 11.25 13.33 36.70 11.11 30 14.38 17.50 40.12 16.67 40 17.50 21.67 42.74 22.22 50 20.63 25.83 44.88 27.78 60 23.75 30.00 46.71 33.33 70 26.88 34.17 48.32 38.89 80 30.00 38.33 49.76 44.44 90 33.13 42.50 51.06 50.00
100 36.25 46.67 52.26 55.56 110 39.38 50.83 53.36 61.11 120 42.50 55.00 54.39 66.67 130 45.63 59.17 55.35 72.22
* Assume average vehicle length of 5 meters.
รูปท่ี 4.7: แสดงการเปรียบเทยีบ ระยะหางที่ปลอดภัยในการขับขี่ดวยแบบจําลองชนดิตาง ๆ
โดยแบบจําลองที่นํามาพิจารณา ทั้ง 4 แบบ ไดแก 1) แบบจําลองของ Pipe 2) แบบจําลอง
ของ Forbes 3) กฎ 2 วินาที และ 4) คาที่คํานวณโดยใชแบบจําลองGM เมื่อความเร็วมีคาต่ํากวา 90 กม/ชม จะพบวาระยะหางที่ปลอดภัยในการขับรถตามกัน ที่ไดจากการปรับเทียบจากแบบจําลองGM จะมีคาสูงกวาแบบจําลองที่เหลือทั้งหมด อยางไรก็ตาม หากความเร็วสูงกวา 90 กม/ชม จะพบวาระยะหางที่ปลอดภัยในการขับรถตามกันที่ไดจากการปรับเทียบแบบจําลอง GM จะมีคาต่ํากวา คาตามกฎ 2 วินาที เราสามารถกลาวไดวาระยะหางที่ปลอดภัยในการขับรถตามกันที่ไดจาก
Recommended following distances

32
แบบจําลอง GM มีความถูกตองมากกวาคาจากแบบจําลองอื่น ๆ เนื่องจากแบบจําลองอื่นไมคํานึงถึงพฤติกรรมของผูขับขี่ตามหลักเสถียรภาพของการจราจรซึ่งแบบจําลองในการศึกษานี้ก็ไดรับการปรับเทียบดวยขอมูลจราจรที่เก็บในประเทศไทยอีกดวย ระยะหางในการขับขี่ที่หามานี้มีความเหมาะสมกับชวงความเร็ว 80-120 กม/ชม ตามขอมูลที่เก็บมาไดเทานั้น โดยท่ีเปนชวงความเร็วที่พบไดโดยทั่วไปบนทางหลวงแผนดิน
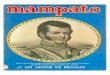
ในการนําผลการวิจัยนี้ไปประยุกตใชงานจริง ผูวิจัยไดนําเสนอรูปแบบเครื่องหมายบนผิวจราจรลักษณะ “DOT” เพื่อใหผูขับขี่ทราบถึงระยะหางที่ปลอดภัยในการขับรถตามกัน โดยที่เครื่องหมายบนผิวการจราจรนี้ ควรนํามาใชกับถนนในชวงที่มีจํานวนอุบัติเหตุจากการชนทายสูงหรืออุบัติเหตุอันเนื่องมาจากผูขับขี่ที่มีความกาวราวที่มักมีพฤติกรรมขับรถตามแบบกระชั้น โดยที่บริเวณดังกลาวความจุของถนนจะตองมากเพียงพอที่จะรองรับปริมาณการจราจร เครื่องหมาย “DOT” จะมีระยะหางไมนอยกวา ระยะหางที่ปลอดภัยในการขับขี่ คําแนะนําในการนําเครื่องหมายบนผิวการจราจรแบบ “DOT” ไปใชจริงไดนําเสนอในรูปของแบบแนะนํา โดยแบบแนะนํานี้เปนเพียงแบบเบื้องตนของการวิจัยเทานั้น ไมใชแบบมาตรฐาน (สําหรับรายละเอียดกรุณาดูรูปที่ 4.8) คําศัพทท่ีเก่ียวของกับแบบแนะนํามีดงันี้ 1. Comprehension Time (วินาที) คือ เวลาที่ผูขับขี่ตองการใชในการทาํความเขาใจ ความหมายของเครื่องหมายบนผิวจราจร 2. Perception และ Reaction Time (วินาที) คือ เวลาที่ผูขับขี่ทั่วไปบนเสนทาง รับรู และ เร่ิมตอบสนองตอเครื่องหมายบนผิวจราจร โดยทั่วไปคือ 2.5 วินาที (Green Book 2004) เวลา P/R นี้แตกตางจากเวลาการตอบสนองของผูขับขี่ ในแบบจําลองการขับรถตามกัน 3. Adjustment Time (วินาท)ี คือ เวลาที่ผูขับในรถยนตคนัที่วิ่งตามตองการเพื่อใหสามารถปรับระยะหางระหวางรถของเขากับรถที่วิ่งนําหนา 4. Effective Time (วินาท)ี คอื ระยะเวลาทีรู่ปแบบ “DOT” มีผลตอผูขับขี่ในการรักษาระยะหางในการขับขี่ที่ปลอดภัย หลังจากขับผานรูปแบบ“DOT” ไปแลว 5. Posted Speed limit (กม/ชม) คือ ความเรว็ตามกฎหมายที่อนุญาตใหขบัขี่ได 6. Marking Spacing, S (เมตร) คือ ระยะหางระหวาง “DOT” บนผิวทางมีคาเทากับระยะหางที่ปลอดภัยในการขับรถตามกัน ลบดวย 4.5 เมตร (เพื่อปรับแกความยาวของรถ) และลบดวย 5.0 เมตร (ความยาวของตัวรถ) 7. Vehicle Correction (เมตร) คือ ระยะหางของรถจาก “DOT” ที่ใกลที่สุดเพื่อใหสามารถมองเห็น “DOT” ไดจากระดับสายตาของผูขับขี่ คานี้สมมุติใหมีระยะ 4.5 เมตรจากกนัชนหนารถถึงขอบของ “DOT” ดังแสดงรูปที่ 4.10

33
8. Number of Marking in System คือ จํานวนของ “DOT” ตามรูปแบบของเครื่องหมายบนผิวจราจรตามความยาวของถนนที่ตองการดวยความเร็วที่กําหนด เปนระยะเวลาเทากับผลรวมของ Comprehension time P/R time และ adjustment time 9. Pattern Length, L (เมตร) คือ ระยะวัดจากศูนยกลางของ“DOT” แรกถึงศูนยกลางของ “DOT” สุดทายในรูปแบบ ระยะทางนี้มีคาเทากับจํานวน “DOT” ในรูปแบบลบหนึ่งแลวคูณดวยระยะหางระหวาง “DOT” 10. Pattern Spacing, X (เมตร) คือ ระยะทางที่รถจะวิ่งระหวางรูปแบบของ “DOT” โดยมีคาเทากับความเร็วตามกฏหมายคูณดวย effective time

34
รูปท่ี 4.8: ภาพแสดงปาย และ การจัดตําแหนง
ของเครื่องหมายบนผิวจราจรแบบ “DOT”

35
รูปท่ี 4.9: ขนาดของเครื่องหมายบนผิวจราจรแบบ “DOT”

36
รูปท่ี 4.10: ระยะหางที่ปลอดภัยในการขับขี่ และ การติดตั้ง “DOT”

37
รูปท่ี 4.11: เหตุผลในการปรบัแกความยาวของรถยนต

38
บทที่ 5 บทสรุปและงานวิจยัในอนาคต
การชนกันทายรถ คือ อุบัติเหตุที่ เกิดจากการที่รถคันที่วิ่งตามหลังขับชนรถคันหนา โดยทั่วไป รูปแบบการชนทายที่มักเกิดขึ้นแบงไดเปน 3 ลักษณะ ไดแก: 1) เมื่อรถคันหนาลดความเร็วอยางกะทันหัน เชน การหลีกเลี่ยงที่จะชนคนกําลังขามถนน 2) รถคันที่วิ่งตามหลังมีเวลาไมเพียงพอตอการเบรกจึงชนกับรถคันที่อยูขางหนา 3) รถคันที่วิ่งตามเรงความเร็วมากกวารถคันที่วิ่งนําบริเวณทางแยก กรมทางหลวง เปนหนวยงานหลักที่มีหนาที่ และ ความรับผิดชอบใน การวางแผน การออกแบบ กอสราง และ บํารุงรักษาทางหลวงแผนดินในประเทศไทย แมวาจะไมมีสถิติแยกตามประเภทของสาเหตุการเกิดอุบัติเหตุทางถนน แตก็เปนที่เชื่อกันวาการชนทายเปนอุบัติเหตุทางถนนที่พบบอยที่สุด การขับรถตามกันระยะกระชั้นเกิดจากพฤติกรรมของผูขับขี่ เมื่อผูขับขี่ที่ใจรอนจะขับรถจี้ติดกับรถคันหนามากกวาที่ควรจะเปนซึ่งชัดเจนวานั่นจะกอใหเกิดการชนทายรถคันอื่น งานวิจัยช้ินนี้ไดพัฒนาวิธีประมาณระยะหางที่ปลอดภัยในการขับรถตามกัน ที่ชวงความเร็ว 80 ถึง 120 กม/ชม. ซ่ึงเปนชวงความเร็วที่พบไดโดยทั่วไปบนทางหลวง งานวิจัยนี้ใชหลักความมีเสถียรภาพ แบบ Asymptotic ของแบบจําลองการขับรถตามกันแบบ GM5th ซ่ึงสามารถประกันไดวาการสั่นของระยะหางระหวางรถยนตในกลุมของรถยนตที่วิ่งตามกันมาจะลดลงในกรณีที่มีการเปลี่ยนแปลงการเคลื่อนที่ของรถคันที่วิ่งนําหนาสุด โดยในการศึกษานี้ใชคาเวลาในการตอบสนอง 1.50 วินาที เนื่องจากเปนคาขอบเขตบนตามที่การศึกษาสวนใหญนําเสนอไวในวรรณกรรมทบทวน ในงานวิจัยนี้ ไดทบทวนวรรณกรรมที่เกี่ยวของกับแบบจําลองการขับรถตามกัน และ หัวขออ่ืน ๆ ที่เกี่ยวของ ขอมูลของความเร็วและปริมาณการไหลทําการเก็บจากพื้นที่ศึกษาบนทางหลวงพิเศษหมายเลข 7 หรือ สายมอเตอรเวยชลบุรี โดยนําขอมูลมาใชในกระบวนการปรับแกแบบจําลองการไหลการจราจรที่สมมูลกับแบบจําลองการขับรถตามกันของ GM5th ในการปรับเทียบคาพารามิเตอรของแบบจําลองนั้นใชวิธี maximum likelihood เนื่องจาก ไมเพียงสามารถหาคาเฉลี่ยไดแตยังสามารถหาคาเบี่ยงเบนมาตรฐาน (standard error) ของพารามิเตอรแตละตัวไดอีกดวย จากนั้นทําการคํานวณหาระยะหางที่ปลอดภัยในการขับขี่ตามกัน โดยใชหลักความมีเสถียรภาพแบบ Asymptotic ของกระแสจราจรตามแบบจําลองการขับรถตามกันของGM นอกจากนี้เพื่อใหมีการนําผลการวิจัยนี้ไปใชใหเกิดประโยชน จึงไดพัฒนาเครื่องหมายบนผิวจราจรแบบ “DOT” เพื่อชวยผูขับขี่ใหทราบวาควรเวนระยะหางที่ปลอดภัยในการขับรถตามกันอยางไร

39
บทสรุปของการวิจัยมีดังนี้
แบบจําลองการขับรถตามกัน GM5th ไดถูกปรับเทียบโดยใชแบบจําลองการไหลของการจราจรแบบมหภาคที่สมมูลกันโดยมีขอมูลการจราจรจากทางหลวงพิเศษหมายเลข 7 เปนฐานในการปรับเทียบ
วิธี maximum likelihood สามารถนํามาใชในการปรับเทียบแบบจําลองการขับรถตามกันของ GM ได
วิธี Perturbation สามารถใชในการหาสภาวะความมีเสถียรภาพ แบบ Asymptotic ของแบบจําลองการขับรถตามกันของ GM ได
แบบแนะนํา เพื่อกําหนดระยะหางที่ปลอดภัยในการขับขี่ไดถูกพัฒนาสําหรับชวงความเร็วที่ 80 ถึง 120 กม/ชม. ใหสามารถนําไปใชงานจริงในภาคสนามได
สําหรับงานวิจัยในอนาคตเพื่อพัฒนาการวิเคราะหแบบจําลองการขับรถตามกันในการหาระยะหางที่ปลอดภัยในการขับขี่ตามกันไดแก
เก็บขอมูลการจราจร อาทิ ความเร็วและปริมาณการจราจรทั้งจากทางหลวงพิเศษ และ ทางหลวงสายหลักอื่น ๆ ที่มีสภาพการจราจรติดขัดและคลองตัว
เก็บขอมูลจราจรระดับจุลภาคทั้ง ตําแหนงความเร็ว ความเรงของรถแตละคันโดยใชเทคนิคการถายภาพทางอากาศ
พัฒนาวิธีการวิเคราะหขอมูลจราจรโดยใชหลักของ panel data analysis เพื่อใหสามารถปรับเทียบคาเวลาในการตอบสนองไดอยางมีความแมนยํามากขึ้น
พัฒนาและนําผลของการวิจัยนี้ไปสูการทําแบบมาตรฐาน ในการจัดรูปแบบเครื่องหมายจราจรบนผิวทางแบบ “DOT” ตอไป

40
เอกสารอางอิง
Ahmed K.I., Modeling drivers’ acceleration and lane changing behaviors. PhD thesis, Department of Civil and Environmental Engineering, MIT, 1999. Brackstone, M. and McDonald, M. (1999), Car Following: A Historical Review. Transportation Research Part F: Traffic Psychology and Behaviour, 1, 2, pp.181-196. Darroch, J.N., and Rothery, R.W. (1973). Car-Following and Spectral Analysis. Proceeding of the 5th International Symposium on the Theory of Traffic Flow and Transportation, pp.47-56. Fambro D.B., Koppa R.J., Picha D.L. and Fitzpatrick K. (1998), Driver perception-brake response in stopping sight distance situations. Transportation Research Record 1628, pp. 1-7. Forbes, T.W. (1963), Human Factor Considerations in Traffic Flow Theory. Highway Research Record 15, pp.60-66. Gurusinghe, G.S., Nakatsuji, T., Azuta, Y., Ranjitkar, P., Tanaboriboon, Y. Multiple Car Following Data Using Real Time Kinematic Global Positioning System, 81st TRB Annual Meeting, Washington D.C., 2002, Preprint CD-ROM. Gurusinghe, G.S., Nakatsuji, T., Tanaboriboon, Y., and Suzuki, J. (2001). A Car-Following Model Incorporating Excess Critical Speed Concept. Journal of Eastern Asia Society for Transportation Studies, 4(2), pp.171-183.

41
Gazis, D.C., Herman, R., Rothery, R.W. (1961), Nonlinear Follow-the-leader Models of Traffic Flow. Operations Research 9, pp.545-567. Holland, E.N. (1998), A Generalized Stability Criterion for Motorway Traffic. Transportation Research Part B: Methodology 32, pp.141-154. Kohler, U. (1973). Stability of Vehicle Platoons. Proceeding of the 5th International Symposium on the Theory of Traffic Flow and Transportation, pp.39-55. Lerner N., Huey R., McGee H. and Sullivan A. (1995), Older driver perception-reaction time for intersection sight distance and object detection. Report FHWA-RD-93-168, Federal Highway Administration, U.S. Department of Transportation, Washington DC. Leutzbach, W. (1988), An Introduction to the Theory of Traffic Flow, Springer-Verlag, Berlin. May, A.D. (1990). Traffic Flow Fundamentals, Prentice Hall, Englewood Cliffs, New Jersy. Pindyck, R.S., and Rubinfeld, D.L. (1981). Econometric Models and Economic Forecasts, McGraw-Hill, New York. Pipes, L.A. (1953), An Operational Analysis of Traffic Dynamics. Journal of Applied Physics, 24, pp.274-281. Ranjitkar P., Nakatsuji, T., Gurusinghe, G.S., Azuta, Y. Car Following Experiments Using RTK GPS and Stability Characteristics of Followers in Platoon, 7th International

42
Conference on Applications of Advanced Technology in Transportation, Boston, 2002, Preprint CD-ROM. Subramanian, H. Estimation of Car-Following Models, M.S. thesis, Department of Civil and Environmental Engineering, MIT, 1996. Winsum, W.V. (1999). The Human Element in Car Following Models. Transportation Research Part F: Traffic Psychology and Behaviour 2, pp.207-221.

43
ภาคผนวก
ขอมูลระยะหางในการขับรถตามกันที่ปลอดภัย

44
ภาคผนวก A: ขอมูลท่ีใชในการวิจัยนี ้

45

46

47

48

49

50

51

52
รายงานฉบับท่ี : วพ. สํานักวิจยัและพัฒนางานทาง กรมทางหลวง ผูเขียน : ดร.พลเทพ เลิศวรวนิช นายณัฐสม สงวนวงษ นายมงคล ทวีชัยทศพล ชื่อเร่ือง : ระยะทางในการขับรถตามกันที่ปลอดภัย บทคัดยอ : ในปจจุบันนี้ การคมนาคมขนสงเปนสิ่งจําเปนในการดําเนินกิจกรรมทาง
เศรษฐกิจและสังคม แตผลเสียอันสืบเนื่องมาจากการเพิ่มขึ้นของการคมนาคม คือ การสูญเสียทรัพยสิน การสูญเสียชีวิต และ การบาดเจ็บที่สังคมตองแบกภาระไว ปจจุบันในประเทศไทยมีอุบัติเหตุทางถนนเกิดขึ้นมากกวา 100,000 คร้ังตอป โดยมีอัตราการเสียชีวิตที่เกี่ยวของกับอุบัติเหตุทางถนนถึง 12,000 รายตอป ดังนั้น ไมวาจะใชสูตร หรือ สมการทางคณิตศาสตรใด ๆ ในการคํานวณความสูญเสียหรือความเครียดทางจิตใจออกมาเปนตัวเงินแลว ตนทุนทางสังคมที่แทจริงอันสืบเนื่องมาจากอุบัติเหตุทางถนนนั้นมหาศาล และ จําเปนตองไดรับความใสใจจากสังคม
ถึงแมวาไมมีสถิติแยกตามประเภทของสาเหตุการเกิดอุบัติเหตุทางถนน แตเปนที่เชื่อกันวาการชนทายเปนอุบัติเหตุทางถนนที่พบบอยคร้ังที่สุด ดังนั้น วัตถุประสงคของการวิจัยนี้คือ การหาแนวทางในการบรรเทาและลดความรุนแรงของการเกิดอุบัติเหตุ โดยเฉพาะอยางยิ่งอุบัติเหตุจากการชนทาย ซ่ึงในการวิจัยนี้ไดนําเสนอแนวคิดใหมที่เรียกวา การกําหนดระยะหางที่ปลอดภัยในการขับขี่และพัฒนาวิธีการคํานวณระยะหางที่ปลอดภัยในการขับขี่ สําหรับชวงความเร็ว 80 – 120 กิโลเมตรตอช่ัวโมง ซ่ึงเปนชวงความเร็วที่พบทั่วไปบนทางหลวงแผนดิน วิธีการที่พัฒนาขึ้นนี้ไดใชหลักการของ Maximum Likelihood Estimation (MLE) และ Perturbation Technique เพื่อหาระยะหางที่ปลอดภัยในการขับขี่ นอกจากนี้ในการงานวิจัยยังไดนําเสนอปายและเครื่องหมายบนผิวจราจรแบบ “DOT” Tailgating Treatment เพื่อชวยใหผูขับขี่ทราบถึงระยะหางในการขับขี่ที่ปลอดภัยดวย
ศัพทเฉพาะเรื่อง : ทล.วพ./ว./2550/ท. ISSN 0125-8044

53
Report No. : RD. Bureau of Road Research and Development Department of
Highways Authors : Dr.Ponlathep Lertworavanich Nutsom Sanyuanvong Mongkol Taveechaitossapol Abstract : Nowadays transportation forms an integral part of social
activities. Unfortunately, one of the by-products of modern
transportation is the price that society pays for injury and loss of life.
In Thailand there are more than 100,000 traffic accidents and traffic-
related casualties of approximately 12,000 deaths per year.
Regardless of which formula one uses to compute the monetary loss
and the physiological and psychological stress due to these accidents,
the true cost to society is so great that it defies comprehension.
Even though there is no specific statistic in Thailand, it is thought that
rear-end collision is the most common type of road accidents.
Therefore, the aim of this research is to mitigate or reduce the severity
and the number of road accidents, especially rear-end collisions by
introducing a safe-following distance concept. This research developed
a methodology to estimate the safe car-following distance for a speed
range from 80 to 120 km/h within which speeds are commonly
observed on the national highways of Thailand. The proposed is based
on the maximum likelihood estimation and perturbation technique to
derive the safe following distance. In order to bring the findings of this
research into practice, the “dot” tailgating treatment marking is
developed as a safety countermeasure for assisting drivers in
establishing the recommended following distance.