Embed Size (px)
Citation preview

การแข่งขันหุ่นยนต์ ABU ชิงชนะเลิศประเทศไทย ประจําปี พ.ศ. 2552
(ABU ROBOT CONTEST THAILAND CHAMPIONSHIP 2009)
ร่วมตะลุย ลั่นกลองชัย(Travel Together For The Victory Drums)
โดยสถานีโทรทัศน์โมเดิร์นไนน์ บริษัท อสมท จํากัด (มหาชน)
สํานักงานคณะกรรมการการอาชีวศึกษาสมาคมส่งเสริมเทคโนโลยี (ไทย-ญี่ปุ่น)
แปลและเรียบเรียงโดย รศ.ดร.สถาพร ลักษณะเจริญ สมาคมวิชาการหุ่นยนต์ไทย
http://www.trs.or.th

สารบัญ
ความร่วมมือระหว่างมนุษย์และหุ่นยนต ์ 2
Kago, หัวใจหลักของการแข่งขัน 2
ความสําคัญของความปลอดภัย 3
การแข่งขันภายในประเทศ 3
กติกาการแข่งขัน 4
1. แนวทางการแข่งขัน 5
2. สนามแข่งข้น 6
3. รายละเอียดของ Kago 8
4. วิธีการแข่งขัน 9
5. การดําเนินการแข่งขัน 10
6. การขอเริ่มต้นใหม่ RETRIES 14
7. การตัดสินแพ้ชนะ 15
8. ลักษณะที่ต้องตรวจสอบในการออกแบบและสร้างหุ่นยนต์ 16
9. กฏข้อบังคับ 18
10.Disqualification 19
11.ความปลอดภัยของหุ่นยนต์ 19
12.ทีมที่เข้าแข่งขัน 20
13. เรื่องอื่นๆ 20
14.Appendix 21
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
1 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

ร่วมตะลุย ลั่นกลองชัย
Travel Together For the Victory Drums
ความร่วมมือระหว่างมนุษย์และหุ่นยนต์ ความร่วมมือระหว่างมนุษย์และหุ่นยนต์ เป็นหัวใจของการแข่งขัน ABU Asia-Pacific Robot Contest 2009 ณ กรุงโตเกียว ประเทศญี่ปุ่น ในงานอุตสาหกรรม การใช้งานของหุ่นยนต์ได้เข้ามามีบทบาทเป็นอย่างมาก การพัฒนาหุ่นยนต์แบบใหม่เป็นสิ่งจําเป็นในงานหลายสาขาเช่น การช่วยเหลือผู้สูงอายุ และผู้ป่วยที่พิการ งานกู้ภัย เป็นต้น หุ่นยนต์ประเภทใหม่ จะต้องมีความสามารถในการใช้งานเป็นส่วนหนึ่งของชีวิตประจําวัน และช่วยอํานวยความสะดวกกับมนุษย์ด้วยความห่วงใย หุ่นยนต์จะต้องมีคุณสมบัติที่ร่วมมือกับมนุษย์ เช่นความเอื้ออาทร และ ความร่วมมือกันภายใต้ความเร็ว พลังงานและความละเอียดที่มีใช้ในหุ่นยนต์ หุ่นยนต์ที่มีการออกแบบด้วยแนวคิดใหม่นี้ จะเป็นที่ต้องการในอนาคตอันใกล้ ABU ROBOCON 2009 ได้ตระหนักถึงความมุ่งมั่นที่จะมีเป้าหมายของความสัมพันธ์ระหว่าง หุ่นยนต์่บังคับด้วยมือกับหุ่นยนต์อัตโนมัติ ซึ่งเป็นความท้าทายที่ไม่ง่าย แต่เป็นความคุ้มค่าอย่างยิ่ง
Kago, หัวใจหลักของการแข่งขัน
Kago เป็น สะเหรี่ยงแบบญี่ปุ่นที่ใช้มาในสมัยโบราณ โดยผู้คนจะหาม Kago ไปยังสถานที่ต่างๆ ซึ่ง Kago นี้มีลักษณะเป็น กระเช้าสําหรับหามด้วยคานไม้ (shoulder pole ) การหามจะต้องใช้ คนสองคนโดยมีคนหนึ่งยืนอยู่ด้านหน้า และ อีกคนหนึ่งยืนอยู่ด้านหลัง แสดงดังในรูป การเดินทางในสมัยโบราณ พื้นที่ไม่เรียบ มีลักษณะเป็นภูเขา ทางลาดชัน และ ทางคดเคี้ยว โดยผู้ที่หาม Kago จะต้องคอยระมัดระวังไม่ให้ Kago แกว่งไปมา เพื่อให้ถึงจุดหมายอย่างปลอดภัย
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
2 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

ความสําคัญของความปลอดภัย ความปลอดภัยเป็นหัวใจสําคัญที่สุดของการแข่งขัน ABUROBOCON 2009 ความปลอดภัยของหุ่นยนต์เป็นส่วนที่สําคัญที่สุดในการแข่งขัน ผู้เข้าร่วมแข่งขันจะต้องรับผิดชอบความปลอดภัยของหุ่นยนต์ ผู้ร่วมทีมจะต้องทํางานอย่างใกล้ชิดเพื่อความปลอดภัย ความปลอดภัยจะต้องเป็นหัวใจหลักของทุกคนที่เข้าร่วมในการแข่งขัน
การแข่งขันภายในประเทศ การแข่งขันภายในของแต่ละประเทศต้องใช้กฎกติกา ตาม ABU ROBOCON 2009 Tokyo เป็นที่เข้าใจกันว่า วัสดุที่ใช้ในการแข่งขันของแต่ละประเทศอาจแตกต่างกันไป ผู้จัดการแข่งขันภายในประเทศจะจัดหาวัสดุที่ใกล้เคียงกันกับข้อกําหนดตามรายละเอียดของคู่มือนี้
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
3 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

กติกาการแข่งขัน
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
4 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

1. แนวทางการแข่งขัน
ร่วมตะลุย ลั่นกลองชัย เป็น เกมส์การแข่งขันในครั้งนี้ มีพื้นฐานมากจากการเดินทางในสมัยโบราณใช้ Kago palanquin Automatic Carrier Robot (หุ่นยนต์ผู้หามอัตโนมัติ) จะต้องอยู่ด้านหน้า และ Manual Carrier Robot (หุ่นยนต์ผู้หามบังคับด้วยมือ) จะอยู่ด้านหลังโดยจะทํางานสัมพันธ์กัน เพื่อจะหาม Traveller Robot (หุ่นยนต์โดยสารอัตโนมัติ)ใน Kago เพื่อให้ไปถึงที่หมายก่อนทีมฝ่ายตรงข้าม เส้นทางในการเคลื่อนที่อันหลากหลายประกอบไปด้วย เส้นทางภูเขา (Mountain pass) เส้นทางเดินป่า (woods) โดย Kago และ โดย หุ่นยนต์อัตโนมัติโดยสาร จะต้องไม่ร่วงหล่นจาก Kago หุ่นยนต์โดยสารอัตโนมัติ จะต้องตีกลองเมื่อเคลื่อนที่ึถึงบริเวณ Goal Zone ซึ่งมีกลองแบบญี่ปุ่นวางเรียงรายอยู่ในแนวตั้ง 3 ใบ บนขาตั้ง (Platform) ทีมใดสามารถตีกลองทั้งสามใบได้ก่อน จะเป็นฝ่ายชนะ การแข่งขันจะแบ่งเป็น 2 ฝ่าย คือ สีแดงและสีน้ําเงิน การแข่งขันจะใช้เวลาทั้งหมด 3 นาที
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
5 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

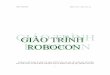
2. สนามแข่งข้นดูรูปที่ 1 ถึง 7 หน้า 22-28 ประกอบ
2.1 สนามจะประกอบไปด้วย Game Area และ Safety Area
2.2 สนามแข่งขันมีขนาด 12,000 x 12,000 mm ล้อมรอบด้วยรั้วไม้ ความสูง 100 mm กว้าง 30 mm
2.3 มีเส้นสีขาวบนพื้นของ Game Area แสดงดังรูป
2.4 Game Area ประกอบด้วย Kago Zone และ Goal Zone
2.5 Kago Zone 2.5.1 Kago Zone แบ่งเป็น 2 ส่วนแยกจากกัน ส่วนหนึ่งสําหรับฝ่ายสีแดง และ อีกส่วนหนึ่งสําหรับฝ่ายสีน้ําเงิน โดยจะมีรั้วไม้ ขนาดความสูง 100 mm และ กว้าง 30 mm เป็นตัวกั้น 2.5.2 Kago Zone ประกอบด้วย Start Zone, Lodge (จุดรอ), Checkpoints(จุดเริ่มใหม่), Mountain Pass(เส้นทางภูเขา), Woods(ทางเดินป่า)
2.5.3 Start Zone 2.5.3.1 Start Zone ขนาด 1,000x2,500 mm 2.5.3.2 พื้นสีแดง จะเป็นของฝ่ายสีแดง พื้นสีน้ําเงิน จะเป็นของฝ่ายสีน้ําเงิน 2.5.4 Lodge (จุดรอ) 2.5.4.1 Lodge (จุดรอ) มีขนาด 500x500 mm และความสูง 12 mm 2.5.4.2 พื้นผิวสีแดง จะเป็นของฝ่ายสีแดง พื้นผิวสีน้ําเงิน จะเป็นของฝ่ายสีน้ําเงิน 2.5.5 Checkpoints (จุดเริ่มใหม่) 2.5.5.1 จะมีพื้นที่ checkpoints (จุดเริ่มใหม่) ในแต่ละ Kago Zone สําหรับฝ่ายสีแดงและสีน้ําเงิน จํานวน 3 จุด 2.5.5.2 Checkpoints จุดที่ 1 และ 2 จะมีขนาด 2,000x1,000 mm และ Checkpoints จุดที่ 3 จะมีขนาด 3,000x1,000 mm
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
6 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

2.5.6 Mountain Pass (เส้นทางภูเขา) 2.5.6.1 Mountain Pass (เส้นทางภูเขา) จะมีขนาด 1,200x3,000 mm 2.5.6.2 เมื่อมองจากด้านบน พื้นเอียงทั้งสองด้านมีระยะ 1,000 mm พื้นที่เรียบด้านบน มีความสูงจากพื้น 300 mm 2.5.6.3 พื้นที่เรียบด้านบน มีพื้นที่ขนาด 1,200x1,000 mm 2.5.7 Woods (ทางเดินป่า) 2.5.7.1 Woods (ทางเดินป่า) ประกอบด้วยเสา 3 ต้น 2.5.7.2 เสาแต่ละต้นเป็นทรงกระบอกมีขนาดเส้นผ่านศูนย์กลาง 76.3 mm ( 3 inch) และสูงจากพื้น 1,600 mm เสาแต่ละต้น ตั้งอยู่บนฐานมีขนาดเส้นผ่านศูนย์กลาง 176.3 mm (7 inch) ติดตั้งอยู่บนพื้นสนาม 2.5.7.3 ขอบของฐานรองรับเสา ต้นที่ 1 และ 2 มีระยะห่าง 2,000 mm และ ขอบข้างของฐานรองรับเสาต้นที่ 2 และ 3 มีระยะห่าง 1,600 mm 2.5.7.4 เสาและฐานรองรับเสา ของฝ่ายสีแดงจะมีสีแดง เสาและฐานรองรับเสาของฝ่ายสีน้ําเงินจะเป็นสีน้ําเงิน
2.6 Goal Zone 2.6.1 Goal Zone มีขนาด 6,000x2,000 mm 2.6.2 ส่วนหนึ่งของ Goal Zone จะเป็นขั้นบันได มีขนาด 1,000x4,000 mm 2.6.3 ขึ้นบันได จะมี 2 ขั้นโดยมีความสูงของขั้นบันได 250 mm 2.6.4 บันไดขั้นแรกแต่ละข้างมีพื้นที่ 1,000x1,000 mm บันไดขั้นบน ขนาด 1,000x2,000 mm 2.6.5 มีบริเวณ Drum Zone ติดตั้งอยู่บนบันได ขั้นสูงสุด มีขนาด 1,000x1,000 mm 2.6.6 Victory Drums ติดตั้งอยู่ใน Drum Zone มีกลอง 3 ใบจัดวางเรียงในแนวตั้ง กลองใบใหญ่ที่สุดอยู่ด้านล่าง และ กลองใบเล็กที่สุดอยู่ด้านบน Victory Drums ประกอบด้วย กลอง 3 ใบและฐานติดตั้งกลอง 2.6.7 กลองเป็นกลองแบบญี่ปุ่น โครงของกลองทําจากไม้ หน้ากลองเป็นหนัง เส้นผ่านศูนย์กลางของกลองใบใหญ ่ 420 mm ใบกลาง 360 mm ใบเล็ก 300 mm
2.7 Safety Area 2.7.1 Safety Area มีขนาดความกว้าง 300 mm รวมถึงรั้วรอบบริเวณ Game Area
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
7 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

3. รายละเอียดของ Kago ดูรูปที่ 8 หน้า 29 ประกอบ
3.1 Kago ที่ใช้ในการแข่งขันจะต้องจัดหาโดยผู้จัดการแข่งขัน
3.2 Kago แต่ละอันประกอบด้วย Shoulder Pole, Cross Bars, และ Seat เป็นที่สําหรับบรรทุก หุ่นยนต์โดยสารอัตโนมัติ และเชือกที่เชื่อมต่อ seat กับ cross bar
3.3 Kago มีน้ําหนักรวมประมาณ 3.0 kg
3.4 Shoulder Pole 3.4.1 Sholder pole มีลักษณะเป็นไม้สี่เหลี่ยมขนาด 2,000x40x30 mm 3.4.2 Shoulder pole จะมีเส้นแบ่งเป็นขีดสีขาวที่มีขนาดความกว้างของเส้น 10 mm วัดจากปลายของ Shoulder pole แต่ละข้างเข้ามา 730 mm โดยมีระยะห่างของแต่ละเส้น 50 mm 3.4.3 Cross Bar จะติดตั้งอยู่ที่ระยะ 750 mm วัดจากปลายทั้งสองด้านของ Shoulder pole โดย Cross Bar แต่ละชิ้นทําด้วยไม้เป็นสี่เหลี่ยมขนาด 500x40x30 mm
3.5 Seat 3.5.1 Seat ทําจากไม้ Plywood ขนาด 500x500x12 mm 3.5.2 Seat ของฝ่ายสีแดงจะเป็นสีแดง ของฝ่ายสีน้ําเงินจะเป็นสีน้ําเงิน โดยมีเส้นสีขาวลากตัดกันขนาดความกว้างของเส้น 30 mm
3.6 การเชื่อมต่อกันของ Shoulder Bar และ Seat 3.6.1 Seat จะต่อกับ Cross Bar ด้วยเชือกจํานวน 4 เส้น 3.6.2 เชือกทําด้วย ลวดสแตนเลส มีความหนา 1.5 mm 3.6.3 ด้านล่างของ Shoulder Pole มีระยะห่าง 800 mm วัดจากด้านบนของ Seat
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
8 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

4. วิธีการแข่งขัน
4.1 ระยะเวลาการแข่งขัน 4.1.1 การแข่งขันในแต่ละครั้งจะใช้เวลา 3 นาที 4.1.2 ในกรณีต่อไปนี้การแข่งขันจะยุติลง ถึงแม้ระยะเวลาจะไม่ถึง 3 นาที 4.1.2.1 เมื่อได้ Goal 4.1.2.2 กรณีเกิด Disqualification 4.1.2.3 เมื่อกรรมการเห็นว่าไม่สามารถดําเนินการแข่งขันต่อไปได้
4.2 การเตรียมหุ่นยนต์ 4.2.1 มีระยะเวลา 1 นาที ในการเตรียมตัวของแต่ละการแข่งขัน 4.2.1.1 ผู้ร่วมทีม 3 คนจะเป็นผู้จัดเตรียมหุ่นยนต์ 4.2.1.2 ทีมใดที่ไม่สามารถจัดเตรียมหุ่นยนต์ได้ภายในระยะเวลา 1 นาทีที่กําหนด จะสามารถทําได้อีกครั้งเมื่อการแข่งขันเริ่มขึ้น
4.3 การปล่อยหุ่นยนต์ และผู้ร่วมทีม บริเวณเริ่มต้นของการแข่งขัน 4.3.1 หุ่นยนต์ผู้หามอัตโนมัติ, หุ่นยนต์โดยสารอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือ จะต้องวางอยู่ในบริเวณ Start Zone ที่หาม Kago โดย หุ่นยนต์ผู้หามอัตโนมัติ จะต้องวางอยู่ด้านหน้าของ Kago ในทิศทางของการเคลื่อนที่ไปข้างหน้า และ หุ่นยนต์ผู้หามบังคับด้วยมือ จะต้องอยู่ด้านหลัง โดย Kago จะต้องไม่สัมผัสพื้นสนาม 4.3.2 หุ่นยนต์โดยสารอัตโนมัติ จะวางอยู่บริเวณ Lodge 4.3.3 ผู้ร่วมทีมจะต้องรับผิดชอบในการ start หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์โดยสารอัตโนมัติ ซึ่งจะยืนอยู่ใกล้ๆ กับ หุ่นยนต์ทั้งสองตัว โดยจะอนุญาติให้ start หุ่นยนต์ในบริเวณ Game Area ได้ 4.3.4 ผู้ควบคุม หุ่นยนต์ผู้หามบังคับด้วยมือหุ่นยนต์ผู้หามบังคับด้วยมือ จะรอในบริเวณ Game Area โดยถือชุดควบคุมอยู่ในมือ
4.4 การ Start หุ่นยนต์ผู้หามอัตโนมัติ 4.4.1 ผู้ร่วมทีม จะ start หุ่นยนต์ผู้หามอัตโนมัติ ด้วยปุ่มสตาร์ทเพียง ปุ่มเดียวเท่านั้น 4.4.2 หลังจากที่ start หุ่นยนต์แล้ว ผู้ร่วมทีม จะต้องออกจากสนามแข่งขันทันที
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
9 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

5. การดําเนินการแข่งขัน
5.1 เมื่อการแข่งขันเริ่มต้นขึ้น แต่ละทีมจะต้องปฏิบัติตามเงื่อนไขดังต่อไปนี้ 5.1.1 หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ขึ้นบน Kago (The Task of Boarding) 5.1.2 ภาระกิจข้ามภูเขา (The Task of crossing the Mountain Pass) 5.1.3 ภาระกิจเดินผ่านเส้นทางเดินป่า (The Task of passing though the Woods) 5.1.4 ภาระกิจหุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ลงจาก Kago (The Task of Alighting) 5.1.5 ภาระกิจหุ่นยนต์โดยสารอัตโนมัติลั่นกลองชัย (The Task of Beating)
5.2 แต่ละทีมจะต้องปฏิบัติตามเงื่อนไขดังต่อไปนี้ในระหว่างการแข่งขัน 5.2.1 เมื่อเริ่มต้นการแข่งขันไปยังการเสร็จสิ้นภาระกิจของหุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ลงจาก Kago การหาม Kago จะต้องทําด้วย หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือ 5.2.2 หุ่นยนต์ผู้หามอัตโนมัติ จะต้องเคลื่อนที่นําหน้า Kago เสมอ ในทิศทางการเคลื่อนที่ (หากไม่ปฏิบัติตามจะผิดกฏข้อ 9.1.3) ทิศทางการเคลื่อนที่หมายถึง ทิศทางที่ Kago เคลื่อนที่ในสนามเมื่อขณะทําการปฏิบัติหน้าที่ในแต่ละภาระกิจ 5.2.3 ห้ามหุ่นยนต์ผู้หามบังคับด้วยมือ ทําการผลักหรือดัน หุ่นยนต์ผู้หามอัตโนมัติ ด้วย Shoulder Pole หรือ คาน (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 10.1.1) 5.2.4 หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือ จะต้องไม่สัมผัสกับส่วนใดๆของ Kago ยกเว้นแต่ Shoulder Pold เท่านั้น (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.4) 5.2.5 ห้ามส่วนหนึ่งส่วนใดของ หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือ เข้าไปในพื้นที่บริเวณ Goal Zone หรือ บริเวณอากาศด้านบนของ Goal Zone (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.6) 5.2.6 ห้าม Kago สัมผัสกับพื้นสนาม (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.7) กฏข้อนี้ยกเว้นแต่ในกรณี ขณะหุ่นยนต์โดยสารอัตโนมัติกําลังเคลื่อนที่ขึ้นหรือลงจาก Kago หรือ เมื่อส่วนใดส่วนหนึ่งของ หุ่นยนต์ผู้หามอัตโนมัติกําลังสัมผัส หรือ เข้าไปในบริเวณ Checkpoint 5.2.7 ห้าม Kago และ หุ่นยนต์โดยสารอัตโนมัติ สัมผัสกับส่วนหนึ่งส่วนใดของเสา (Poles) หรือ ฐานรองรับเสา (Pedestals) (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.8)
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
10 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

5.2.8 ห้าม หุ่นยนต์โดยสารอัตโนมัติ และ ไม้ตีกลอง (Drumstick) สัมผัสกับพื้นสนาม (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.11, ส่วนไม้ตีกลอง 8.7.6-11) กรณียกเว้น เมื่อ ขณะหุ่นยนต์โดยสารอัตโนมัติจอดรอ ณ บริเวณ Lodge (จุดรอ) และ ขณะหุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ลงจาก Kago (the task of alighting) 5.2.9 ห้าม หุ่นยนต์โดยสารอัตโนมัติสัมผัสกับส่วนหนึ่งส่วนใดของ Kago นอกเหนือจากบริเวณ Seat เท่านั้น (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.9) 5.2.10 ห้าม หุ่นยนต์โดยสารอัตโนมัติ และ ไม้ตีกลอง สัมผัสกับ หุ่นยนต์ผู้หามอัตโนมัติ หรือ หุ่นยนต์ผู้หามบังคับด้วยมือ (หากไม่ปฏิบัติตามจะถือว่าผิดกฏข้อ 9.1.10) กรณียกเว้น ในข้อ 5.6.4 และ 5.8.1 5.2.11 ผู้ร่วมทีม ห้ามสัมผัสส่วนใดๆของหุ่นยนต์ ยกเว้นแต่กรณีการ Start และ Retries
5.3 ภาระกิจ หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ขึ้นบน Kago (Task of Boarding) 5.3.1 หุ่นยนต์โดยสารอัตโนมัติสามารถเคลื่อนที่ขึ้นบน Kago ก็ต่อเมื่อ Kago เดินทางมาถึงบริเวณ Lodge 5.3.2 Kago สามารถสัมผัสกับพื้นสนามได้ขณะที่ หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ขึ้นบน Kago 5.3.3 การที่หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ขึ้นบน Kago หมายถึง หุ่นยนต์โดยสารอัตโนมัติอยู่บน Seat และ ห้ามส่วนหนึ่งส่วนใดสัมผัสกับพื้นของ Lodge 5.3.4 ผู้ร่วมทีมจะทําการ Start หุ่นยนต์โดยสารอัตโนมัติ เพื่อให้เคลื่อนที่ขึ้นไปบน Kago ด้วยการกดสวิทช์เพียงปุ่มเดียว 5.3.5 ภายหลังจากการ Start หุ่นยนต์อัตโนมัติ ผู้ร่วมทีมจะต้องออกจากสนามแข่งขันทันที 5.3.6 การเคลื่อนที่ของหุ่นยนต์โดยสารอัตโนมัติ ขึ้นบน Kago จะเสร็จสิ้น ก็ต่อเมื่อ หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ไปบน Kago และส่วนหนึ่งส่วนใดของ หุ่นยนต์ผู้หามอัตโนมัติ ที่อยู่ด้านหน้าเคลื่อนที่เข้ามาในบริเวณ Checkpoint 1หรือเข้าไปในบริเวณพื้นที่อากาศด้านบนของ Checkpoint 1
5.4 ภาระกิจข้ามภูเขา (Task of Crossing) 5.4.1 หุ่นยนต์ผู้หามอัตโนมัติและหุ่นยนต์ผู้หามบังคับด้วยมือจะข้ามบริเวณภูเขาพร้อมกับหาม Kago ที่มีหุ่นยนต์โดยสารอัตโนมัติ อยู่บน Seat 5.4.2 ในการข้ามภูเขาจะต้องเคลื่อนที่ขึ้นบนทางลาดชันขึ้นจาก Check point 1 ต่อเนื่องไปยังพื้นที่เรียบบนภูเขาและเคลื่อนที่ลงจากทางลาดชันด้านตรงข้ามเพื่อนเคลื่อนที่ไปยัง Checkpoint2 5.4.3 ภาระกิจข้ามภูเขาจะเสร็จสิ้นก็ต่อเมื่อหุ่นยนต์ผู้หามบังคับด้วยมือ(ยกเว้นชุดควบคุม)ออกจากบริเวณภูเขาและบริเวณพื้นที่อากาศด้านบนของภูเขา และ หุ่นยนต์ผู้หามอัตโนมัติ เคลื่อนที่เข้าไปยัง Checkpoint2 หรือ บริเวณพื้นที่อากาศด้านบนของ Checkpoint2
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
11 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

5.5 ภาระกิจเดินป่า (Task of Passing) 5.5.1 หุ่นยนต์ผู้หามอัตโนมัติและหุ่นยนต์ผู้หามบังคับด้วยมือจะต้องเคลื่อนที่ผ่านเส้นทางเดินป่าในขณะที่หาม Kago พร้อมกับหุ่นยนต์โดยสารอัตโนมัติอยู่บน Seat 5.5.2 หุ่นยนต์ทั้ง 3 ตัวจะต้องเคลื่อนที่ผ่านเสาต้นที่ 1และ ต้นที่ 2 และระหว่างเสาต้นที่ 2 และต้นที่ 3 ตามลําดับ 5.5.3 ณ จุด Start ของเส้นทางภาระกิจเดินป่า หุ่นยนต์ทั้งสามอาจจะเคลื่อนที่ผ่านด้านใดด้านหนึ่งของเสาต้นที่ 1 5.5.4 การเคลื่อนที่ผ่านเสาต้นที่ 1และต้นที่ 2 จะเสร็จสิ้นก็ต่อเมื่อทุกชิ้นส่วนของหุ่นยนต์ผู้หามบังคับด้วยมือ(ยกเว้นชุดควบคุม)ได้เคลื่อนที่ผ่านระหว่างเสาทั้งสองต้น โดยสังเกตจากเส้นตรงที่สมมติลากเชื่อมต่อกันระหว่างเสาต้นที่ 1 และ ต้นที่ 2 การเคลื่อนที่ผ่านเสาต้นที่ 2 และต้นที่ 3 จะเสร็จสิ้นก็ต่อเมื่อทุกชิ้นส่วนของหุ่นยนต์ผู้หามบังคับด้วยมือ(ยกเว้นชุดควบคุม)ได้เคลื่อนที่ผ่านระหว่างเสาทั้งสองต้น โดยสังเกตจากเส้นตรงที่สมมติลากเชื่อมต่อกันระหว่างเสาต้นที่ 2 และ ต้นที่ 3 5.5.5 การเคลื่อนที่ผ่านเส้นทางภาระกิจเดินป่าจะเสร็จสิ้นก็ต่อเมื่อหุ่นยนต์ทั้งหมดเคลื่อนที่ผ่านเสาต้นที่ 2 และเสาต้นที่ 3 และส่วนใดส่วนหนึ่งของ หุ่นยนต์ผู้หามอัตโนมัติ เคลื่อนที่เข้าไปใน Checkpoint 3 หรือ บริเวณพื้นที่อากาศด้านบน Checkpoint3 5.5.6 ห้ามส่วนใดส่วนหนึ่งของ Kago และ หุ่นยนต์โดยสารอัตโนมัติ สัมผัสกับเสาหรือฐานรองรับเสา
5.6 ภาระกิจการเคลื่อนที่ลงจาก Kago (Task of Alighting) 5.6.1 ผู้ควบคุมทีมอาจจะให้ หุ่นยนต์โดยสารอัตโนมัติ เคลื่อนที่ลงจาก Kago เมื่อภาระกิจเดินป่าเสร็จสิ้น 5.6.2 หุ่นยนต์โดยสารอัตโนมัติ อาจจะเคลื่อนที่ลงบริเวณใดก็ได้ที่อยู่ใน Kago zone และ Goal zone (ดูกฏข้อ 5.2.5 ของ หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือ) 5.6.3 Kago อาจจะสัมผัสกับพื้นของ Kago zone ขณะที่ หุ่นยนต์โดยสารอัตโนมัติ เคลื่อนที่ลงจาก Kago 5.6.4 หุ่นยนต์ผู้หามบังคับด้วยมือ อาจจะสัมผัสกับ หุ่นยนต์โดยสารอัตโนมัติเมื่อหุ่นยนต์โดยสารอัตโนมัติ เคลื่อนที่ลงจาก Kago 5.6.5 การเคลื่อนที่ลงจาก Kago จะเสร็จสิ้นก็ต่อเมื่อ หุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ลงจาก Seat โดยสมบูรณ์ 5.6.6 เมื่อการเคลื่อนที่ลงจาก Kago เสร็จสิ้น ผู้ควบคุมหุ่นยนต์ผู้หามบังคับด้วยมือ จะต้องออกจากสนามทันที 5.6.7 เมื่อการเคลื่อนที่ลงจาก Kago เสร็จสิ้น ผู้ควบคุมหุ่นยนต์ผู้หามบังคับด้วยมือ จะต้องปิด Switch หุ่นยนต์ผู้หามอัตโนมัติ หลังจากได้รับอนุญาติจากกรรมการสนาม
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
12 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

5.7 การพิชิต Goal 5.7.1 อนุญาตเฉพาะหุ่นยนต์โดยสารอัตโนมัติ เคลื่อนที่เข้าไปใน Goal zone 5.7.2 อนุญาตให้ หุ่นยนต์โดยสารอัตโนมัติของทีมฝ่ายแดงเคลื่อนที่เข้าไปในบริเวณบันไดหรือพื้นที่อากาศด้านบนของฝ่ายแดง และ หุ่นยนต์โดยสารอัตโนมัติของฝ่ายสีน้ําเงินเคลื่อนที่เข้าไปในบริเวณบันได หรือพื้นที่อากาศด้านบนของฝ่ายสีน้ําเงิน ของบริเวณ Drum zone 5.7.3 หุ่นยนต์โดยสารอัตโนมัติ ของทั้งสองทีมสามารถเคลื่อนที่เข้าไปในบริเวณ Drum zone หรือพื้นที่อากาศด้านบน 5.7.4 การชนะการแข่งขันก็ต่อเมื่อหุ่นยนต์โดยสารอัตโนมัติทีมใดทีมหนึ่งสามารถตีกลองทั้ง 3 ใบ ในบริเวณ Goal zone ด้วย ไม้ตีกลอง (Drum Sticks) 1อันหรือ หลายอัน(ดูรายละเอียด 8.7.6-11) กรรมการจะเป็นผู้ตัดสินว่ากลองจะถูกตีหรือไม่จากเสียงตีกลอง 5.7.5 ไม้ตีกลองจะต้องติดกับ หุ่นยนต์โดยสารอัตโนมัติ ในขณะที่หุ่นยนต์โดยสารอัตโนมัติกําลังตีกลอง 5.7.6 ในการตีกลอง หุ่นยนต์โดยสารอัตโนมัติ สามารถตีกลองใบไหนก่อนก็ได้ 5.7.7 ในการตีกลอง หุ่นยนต์โดยสารอัตโนมัติสามารถอยู่บริเวณไหนก็ได้ของขั้นบันไดหรือพื้นที่สนาม 5.7.8 หุ่นยนต์โดยสารอัตโนมัติจะต้องตีที่บริเวณ หนังหน้ากลอง ที่หันหน้าเข้าสู่ศูนย์กลางของสนามเท่านั้น (หากไม่ปฏิบัติตามผิดกฏ9.1.15) 5.7.9 ห้ามหุ่นยนต์โดยสารอัตโนมัติและไม้ตีกลองสัมผัสกับส่วนใดส่วนหนึ่งของVictory Drum นอกเหนือจาก หนังหน้ากลองเท่านั้น (หากมีการสัมผัสถือว่าผิดกฏข้อ 9.1.15) 5.7.10 ห้ามไม่ให้ส่วนใดส่วนหนึ่งของหุ่นยนต์โดยสารอัตโนมัติหรือไม้ตีกลองเคลื่อนที่เข้าไปในบริเวณ Drum zone หรือบริเวณพื้นที่อากาศด้านบนของ Drum zone เพื่อเป็นการกีดกันฝ่ายตรงข้าม (หากมีการกีดกันเกิดขึ้นถือว่าผิดกฏข้อ9.1.14)
5.8 จุด Check points 5.8.1 Kago อาจจะวางบนสนาม เมื่อส่วนใดส่วนหนึ่งของหุ่นยนต์ผู้หามอัตโนมัติเคลื่อนที่เข้าไปในบริเวณCheck points หรือบริเวณพื้นที่อากาศด้านบน โดยหุ่นยนต์ผู้หามบังคับด้วยมืออาจจะสัมผัสกับหุ่นยนต์โดยสารอัตโนมัติได้
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
13 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

6. การขอเริ่มต้นใหม่ RETRIES
6.1 กรณีมีการผิดกติกาเกิดขึ้น กรรมการสนามสามารถสั่งให้ทีมนั้นไปเริ่มต้นใหม่อีกครั้ง(Retries)
6.2 กรณีหุ่นยนต์ไม่ทํางานหรือเคลื่อนที่ออกนอกเส้นทางสามารถทําการ Start ใหม่โดยต้องขออนุญาติจากกรรมการ
6.3 สมาชิกในทีมสามารถสัมผัสหุ่นยนต์ได้ทุกตัวในขณะทําการ Retries
6.4 สถานที่ของการ Retries ขึ้นอยู่กับส่วนที่ทําภาระกิจสําเร็จแล้ว
6.5 กรณีที่เกิดการผิดพลาดของหุ่นยนต์โดยสารอัตโนมัติขณะที่เคลื่อนที่ขึ้น Kago การ Retries จะต้องทําใน Start zone
6.6 การRetries จาก Start zoneสามารถทําได้วิธีที่อธิบายไว้ในข้อ 4.3
6.7 ถ้ามีการ Retries หลังจากที่หุ่นยนต์โดยสารอัตโนมัติ เคลื่อนที่ขึ้น Kago เสร็จเรียบร้อยแล้ว หุ่นยนต์ผู้หามอัตโนมัติจะถูกวางไว้ที่จุด Checkpoint1 ถ้าการขอ Retries หลังจาก ภาระกิจข้ามภูเขาเสร็จสิ้นแล้ว หุ่นยนต์ผู้หามอัตโนมัติจะถูกวางไว้ที่ Checkpoint 2 ถ้ามีการขอ Retries หลังจากภาระกิจเดินป่าเสร็จสิ้น หุ่นยนต์ผู้หามอัตโนมัติจะถูกวางไว้ที่ Checkpoint 3 การวางที่ Checkpoint หมายถึงส่วนใดส่วนหนึ่งของ หุ่นยนต์ผู้หามอัตโนมัติอยู่ในบริเวณ Checkpoint หรือ พื้นที่อากาศด้านบน ของบริเวณ Checkpoint
6.8 ในการขอ Retries ณ จุด Checkpoints หุ่นยนต์ผู้หามอัตโนมัติ และ หุ่นยนต์ผู้หามบังคับด้วยมือจะหาม Kago พร้อมกับ หุ่นยนต์โดยสารอัตโนมัติอยู่บน Seat ห้าม Kagoสัมผัสกับพื้นสนาม
6.9 การขอ Retries หลังจากเสร็จสิ้นภาระกิจเคลื่อนที่ลงจาก Kago ของ หุ่นยนต์โดยสารอัตโนมัติจะทําได้โดยการวางหุ่นยนต์โดยสารอัตโนมัติ ในบริเวณใดก็ได้ใน Checkpoint 3
6.10 ในการขอ Retries สมาชิกในทีมหลังจากเปิด Switchแล้ว จะต้องออกจากสนามทันที
6.11 หุ่นยนต์แต่ละตัว จะมี Switch เปิด หรือ ปิด ได้เพียงหนึ่ง สวิทช์ เท่านั้น
6.12 การขอ Retries สามารถทําได้ไม่จํากัดจํานวนครั้ง
6.13 ห้ามทําการขอ Retries เพื่อทําการเปลี่ยนยุทธศาสตร์ หรือ แผนการแข่งขัน
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
14 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

7. การตัดสินแพ้ชนะ
7.1 ทีมใดที่ หุ่นยนต์โดยสารอัตโนมัติ สามารถ ลั่นกลองชัย จํานวน 3 ใบได้เป็นทีมแรก จะเป็นฝ่ายชนะ และการแข่งขันจะยุติลงทันที
7.2 ถ้าไม่มีทีมใดที่สามารถบรรลุจุดมุ่งหมายสูงสุดตามกติกาได้ในระยะเวลา 3 นาที การแข่งขัน การตัดสินมีดังต่อไปนี้ 7.2.1 ทีมที่ตีกลองได้จํานวนมากที่สุดเป็นฝ่ายชนะ 7.2.2 ถ้าจํานวนกลองที่ตีเท่ากัน ทีมที่สามารถตีกลองใบที่อยู่สูงกว่าเป็นฝ่ายชนะ 7.2.3 ถ้าทั้งสองทีมสามารถตีกลองได้ในระดับเดียวกัน ในกรณีที่ทั้งสองทีมตีกลองเพียง 1 ใบ ทีมใดที่ตีกลองได้ก่อนเป็นทีมแรกหรือ ในกรณีที่ทั้งสองทีมตีกลองได้เพียง 2 ใบ ทีมใดที่ตีกลองได้ก่อนเป็นทีมแรกบนกลองใบที่สอง จะเป็นฝ่ายชนะ 7.2.4 ทีมที่สามารถทําภาระกิจสําเร็จได้มากที่สุดจะเป็นฝ่ายชนะ 7.2.5 ถ้าจํานวนของภาระกิจของทั้งสองทีมเท่ากัน ทีมที่หุ่นยนต์โดยสารอัตโนมัติอยู่ใกล้กับกลองชัยมากที่สุด จะเป็นฝ่ายชนะ 7.2.6 ถ้าไม่มีทีมใดทีมหนึ่งปฏิบัติตามดังที่กล่าวมาข้างต้น การแข่งขันจะเริ่มต้นใหม่ หรือ กรรมการจะเป็นผู้ชี้ขาดในการแพ้ หรือ ชนะ
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
15 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

8. ลักษณะที่ต้องตรวจสอบในการออกแบบและสร้างหุ่นยนต์
8.1 แต่ละทีมสร้างหุ่นยนต์ จํานวน 3 ตัวได้แก่ หุ่นยนต์ผู้หามอัตโนมัติ หุ่นยนต์ผู้หามบังคับด้วยมือ และ หุ่นยนต์โดยสารอัตโนมัติ
8.2 หุ่นยนต์ไม่สามารถแยก หรือแตกตัวเป็นหุ่นยนต์ตัวเล็กได้
8.3 ห้ามมีการติดต่อสื่อสารกันระหว่างหุ่นยนต์
8.4 หุ่นยนต์ที่ใช้ในการแข่งขันต้องสร้างด้วยนักศึกษาของมหาวิทยาลัยนั้น
8.5 หุ่นยนต์ผู้หามอัตโนมัติ 8.5.1 หุ่นยนต์ผู้หามอัตโนมัติควรจะเคลื่อนที่อัตโนมัติหลักจากที่มีการกดปุ่มStartโดยสมาชิกในทีมหนึ่งคน 8.5.2 หุ่นยนต์ผู้หามอัตโนมัติจะต้องทําการ Start ด้วย Switch เพียงปุ่มเดียวเท่านั้น ขนาดของหุ่นยนต์ผู้หามอัตโนมัติห้ามเกิน (กว้าง x ยาว x สูง) 1,000 x 1,000 x 1,500 mm
8.6 หุ่นยนต์ผู้หามบังคับด้วยมือ 8.6.1 การควบคุมหุ่นยนต์ผู้หามบังคับด้วยมือทําได้โดยผ่ายสายเคเบิลหรือรีโมทควบคุมระยะใกล้ใช้อินฟราเรด รังสีที่มองเห็นได้หรือคลื่นเสียง ไม่อนุญาตการบังคับด้วยคลื่นวิทยุ ผู้ควบคุมหุ่นยนต์ห้ามนั่งบนหุ่นยนต์ผู้หามบังคับด้วยมือ 8.6.2 กรณีของการควบคุมผ่านสายเคเบิล ความยาวของสายที่ต่อกับหุ่นยนต์ผู้หามบังคับด้วยมือไปยังชุดควบคุมมีความยาวอย่างน้อย 1,000 mm และไม่เกิน 3000 mm สายเคเบิลต่อกับหุ่นยนต์ที่ระดับความสูงไม่น้อยกว่า 1,000 mm วัดจากพื้นสนาม 8.6.3 ขนาดของหุ่นยนต์ผู้หามบังคับด้วยมือ (กว้าง x ยาว x สูง) 1,000x1,000x1,500mm ในกรณีที่กล่าวไว้ในข้อ 5.6.4 และ 5.8.1 อย่างไรก็ตามหุ่นยนต์สามารถยืดแขนหรือส่วนใดส่วนหนึ่งภายในช่วงของวงกลมเส้นผ่านศูนย์กลาง 2,000 mm มุมมองจากด้านบน
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
16 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

8.7 หุ่นยนต์โดยสารอัตโนมัติ 8.7.1 หุ่นยนต์โดยสารอัตโนมัติ ต้องสามารถเคลื่อนที่แบบอัตโนมัติหลักจากที่มีการ Start โดยสมาชิกในทีมยกเว้นแต่ในกรณีดังกล่าวข้อ 5.6.4 และ 5.8.1 8.7.2 หุ่นยนต์โดยสารอัตโนมัติจะทําการ Start ด้วย Switch เพียงปุ่มเดียวเท่านั้น 8.7.3 ขนาดหุ่นยนต์โดยสารอัตโนมัติจะต้องอยู่ในวงกลมเส้นผ่านศูนย์กลาง 2,000 mm มุมมองจากด้านบน 8.7.4 หุ่นยนต์โดยสารอัตโนมัติห้ามสัมผัสส่วนใดส่วนหนึ่งของ Kago นอกจาก Seat 8.7.5 หุ่นยนต์โดยสารอัตโนมัติห้ามยึดติดกับ Seat หุ่นยนต์โดยสารอัตโนมัติจะต้องลื่นไถลหรือตก เมื่อ Seat ทํามุมเอียง 20 องศา วัดจากพื้นระดับด้านใดด้านหนึ่ง 8.7.6 หุ่นยนต์โดยสารอัตโนมัติต้องบรรทุกไม้ตีกลองเพื่อจะนําไปตีกลองและห้ามมีจํานวนมากกว่า 3 ชิ้น 8.7.7 หุ่นยนต์โดยสารอัตโนมัติจะต้องสามารถตีกลองด้วยไม้ตีกลอง 8.7.8 ไม้ตีกลองอย่างน้อยหนึ่งอันจะต้องติดตั้งสูงจากพื้นของ Seat อย่างน้อย 300 mm ขณะที่หุ่นยนต์โดยสารอัตโนมัติ ถูกหามอยู่บน Kago 8.7.9 แต่ละทีมจะต้องจัดหาไม้ตีกลองมาเอง 8.7.10 ขนาดของไม้ตีกลองแต่ละอันมีลักษณะเป็นทรงกระบอก ความยาวอย่างน้อย 300 mm เส้นผ่านศูนย์กลาง 20 mm 8.7.11 แต่ละทีมผู้เข้าแข่งขันจะต้องเตรียมไม้ตีกลองทั้งสีแดงและสีน้ําเงิน 8.8 น้ําหนักหุ่นยนต์ 8.8.1น้ําหนักของหุ่นยนต์รวมทั้งหมดของหุ่นยนต์ทั้งทีมและอุปกรณ์อื่นๆรวมถึงแหล่งพลังงานสายเคเบิลชุดควบคุม ไม้ตีกลอง ต้องไม่เกิน 50 kg. หมายเหตุ น้ําหนักของแบตเตอรี่สํารองที่มีขนาดเดียวกันกับแบตเตอรี่ที่ใช้ในการแข่งขันมิได้นํามาคิด
8.9 แหล่งพลังงานของหุ่นยนต์ 8.9.1 แต่ละทีมต้องเตรียมแหล่งพลังงานมาเอง 8.9.2 แรงดันไฟฟ้าที่ใช้ในหุ่นยนต์แต่ละตัวต้องไม่เกิน DC 24 volt 8.9.3 แหล่งพลังงานอื่นที่กรรมการพิจารณาเห็นว่าอันตรายหรือไม่เหมาะสม อาจห้ามใช้แข่งขัน
8.10 รายละเอียดความปลอดภัย 8.10.1 ห้ามการใช้วัตถุระเบิดไฟ สารเคมี 8.10.2 กรณีที่ใช้แสงเลเซอร์จะต้องใช้ใน Class 2 หรือต่ํากว่า ในการออกแบบและสร้างหุ่นยนต์ จะต้องใช้ความระมัดระวังเป็นอย่างมาก เพื่อจะไม่เป็นอันตรายต่อการแข่งขันโดยเฉพาะลําแสง จะต้องไม่ฉายตกกระทบดวงตาของผู้เข้าชม
8.11 การตรวจสอบหุ่นยนต์ 8.11.1 การตรวจสอบหุ่นยนต์จะทําก่อนการ Test run ล่วงหน้า 1 วันก่อนการแข่งขัน และก่อนการแข่งขันจะเริ่มต้นขึ้นทีมที่ไม่ผ่านการตรวจสอบจะไม่อนุญาตให้ทําการ Test run หรือทําการแข่งขัน 8.11.2 รายละเอียดของการตรวจสอบจะแจ้งให้ทราบต่อไป
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
17 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

9.กฏข้อบังคับ
9.1 กรณีเกิดการกระทําผิดกติกาจะให้ทําการ Retries โดยการนําหุ่นยนต์ไปวางยังจุด Start zone หรือ Check points วิธีการวาง และการ Retries อธิบายไว้ในหัวข้อ 6 กรณีการกระทําผิดกติกามีดังต่อไปนี้ 9.1.1 ส่วนใดส่วนหนึ่งของหุ่นยนต์หรือผู้ควบคุมหุ่นยนต์ หรือ Kago เคลื่อนที่เข้าไปใน Safety Area หรือพื้นที่อากาศด้านบน 9.1.2 ส่วนใดส่วนหนึ่งของหุ่นยนต์หรือผู้ควบคุมหุ่นยนต์หรือ Kago เคลื่อนที่เข้าไปใน Kago zone ของทีมฝ่ายตรงข้ามหรือพื้นที่อากาศด้านบน 9.1.3 ขณะหาม Kago หุ่นยนต์ผู้หามบังคับด้วยมือ อยู่ด้านหน้าในทิศทางของการเคลื่อนที่ 9.1.4 หุ่นยนต์ผู้หามอัตโนมัติ,หุ่นยนต์ผู้หามบังคับด้วยมือ สัมผัสกับส่วนใดสวนหนึ่งของ Kago นอกจาก Shoulder pole 9.1.5 หุ่นยนต์ผู้หามอัตโนมัติ,หุ่นยนต์ผู้หามบังคับด้วยมือมีส่วนใดส่วนหนึ่งสัมผัสกับหุ่นยนต์โดยสารอัตโนมัตินอกเหนือจากข้อ 5.6.4 และ 5.8.1 9.1.6 ส่วนใดส่วนหนึ่งของ หุ่นยนต์ผู้หามอัตโนมัติ หรือ หุ่นยนต์ผู้หามบังคับด้วยมือ เคลื่อนที่ หรือ ล้ําเข้าไปในบริเวณ Goal Zone หรือ พื้นที่อากาศด้านบนของ Goal Zone 9.1.7 Kago สัมผัสพื้นสนามยกเว้น ข้อ 5.3.2, 5.6.3 และ 5.8.1 9.1.8 Kago หรือหุ่นยนต์โดยสารอัตโนมัติ สัมผัสกับเสาหรือฐานรองรับเสาในเส้นทางภาระกิจเดินป่า หุ่นยนต์ผู้หามอัตโนมัติและหุ่นยนต์ผู้หามบังคับด้วยมืออนุญาตให้สัมผัสกับเสาหรือฐานรองรับเสา 9.1.10 ไม้ตีกลองหรือหุ่นยนต์โดยสารอัตโนมัติสัมผัสกับหุ่นยนต์ผู้หามอัตโนมัติหรือหุ่นยนต์ผู้หามบังคับด้วยมือเว้นแต่ในกรณี 5.6.4 และ 5.8.1 9.1.11 หุ่นยนต์โดยสารอัตโนมัติหรือไม้ตีกลองสัมผัสกับพื้นสนาม ยกเว้นบริเวณ Lodge(ที่พัก) และกรณีหุ่นยนต์โดยสารอัตโนมัติเคลื่อนที่ลงจาก Kago 9.1.12 หุ่นยนต์โดยสารอัตโนมัติทําไม้ตีกลองหล่น 9.1.13 ส่วนใดส่วนหนึ่งของหุ่นยนต์โดยสารอัตโนมัติหรือไม้ตีกลอง ยื่นเข้าไปในบริเวณขั้นบันไดของทีมฝ่ายตรงข้ามหรือบริเวณพื้นที่อากาศด้านบน ยกเว้นแต่ในบริเวณ Drum zone 9.1.14 ส่วนใดส่วนหนึ่งของหุ่นยนต์โดยสารอัตโนมัติ หรือ ไม้ตีกลอง ยื่นเข้าไปในบริเวณ Drum zone เพื่อวัตถุประสงค์ในการกีดขวางการทํางานของฝ่ายตรงข้าม 9.1.15 หุ่นยนต์โดยสารอัตโนมัติสัมผัสกับ Victory drum นอกเหนือจากหนังหน้ากลอง 9.1.16 การกระทําใดๆที่นอกเหนือจากกฎข้างต้น โดยไม่ทําให้เกิดการ Disqualification อยู่ในดุลพินิจของกรรมการตัดสิน
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
18 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

10. Disqualification
10.1 การกระทําดังต่อไปนี้จะเกิด Disqualification 10.1.1 หุ่นยนต์ผู้หามบังคับด้วยมือเคลื่อนที่ หุ่นยนต์ผู้หามอัตโนมัติโดยการผลัก 10.1.2 ทีมที่ทําลายสนามหรืออุปกรณ์หุ่นยนต์ของฝ่ายตรงข้าม 10.1.3 ทีมใดทีมหนึ่งหรือผู้ควบคุมหรือ Kago เคลื่อนที่ออกจากสนามบริเวณ Safety Area ทั้งบนพื้นและพื้นที่อากาศด้านบน 10.1.4 ทีมที่หุ่นยนต์เคลื่อนที่เข้าไปใน Kago zone ของฝ่ายตรงข้ามหรือสัมผัสหุ่นยนต์ฝ่ายตรงข้าม 10.1.5 ทีมที่ทําการ False start จํานวน 2 ครั้งในการแข่งขันครั้งหนึ่ง 10.1.6 ทีมที่แสดงให้เห็นถึงความไม่มีน้ําใจนักกีฬา 10.1.7 ทีมที่ไม่เชื่อฟังคําสั่งหรือคําเตือนกรรมการ
11. ความปลอดภัยของหุ่นยนต์
11.1 หุ่นยนต์จะต้องถูกออกแบบและสร้างไม่ให้มีอันตรายกับผู้ชมในสนาม
11.2 หุ่นยนต์ทุกตัวจะต้องถูกออกแบบและสร้างที่ไม่ทําอันตรายต่อฝ่ายตรงข้ามหรือสนามแข่ง
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
19 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

12.ทีมที่เข้าแข่งขัน
12.1 ตัวแทนประเทศ1ทีม
12.2 ใน 1 ทีมประกอบด้วยนักศึกษา 3 คน อาจารย์ 1 คนทั้งหมดอยู่ในมหาวิทยาลัยเดียวกัน ชื่อนักศึกษา 3 คนในทีมจะต้องเป็นผู้เข้าร่วมการแข่งขันเท่านั้น
12.3 ประกอบด้วย pit crew 3 คนในการช่วยปรับหุ่นยนต์ในบริเวณ pit area และช่วยยกหุ่นไปยังสนามแต่ไม่สามารถร่วมการแข่งขัน pit crew ต้องมาจากนักศึกษามหาวิทยาลัยเดียวกัน
12.4 ห้ามนักศึกษาระดับบัณฑิตศึกษาเข้าร่วมการแข่งขัน
13.เรื่องอื่นๆ
13.1 กฎข้อบังคับใดๆที่ไม่ได้กล่าวไว้ในคู่มืออยู่ในดุลยพินิจของกรรมการ
13.2 น้ําหนักและขนาดอื่นๆของสนามรวมถึงอุปกรณ์ที่กล่าวไว้ในคู่มือนี้มีค่าความผิดพลาด ± 5% ถ้ามิได้กล่าวไว้
13.3 คําถามทุกคําถามสามารถค้นหาคําตอบได้ที่ ภาษาไทยhttp://www.mcot.net/technologystreet http://fibo.kmutt.ac.thhttp://www.trs.or.thภาษาอังกฤษhttp://www.aburobocon2009.com คําถามเกี่ยวกับกติกาการแข่งขัน สอบถามได้ที่:รศ.ดร.ชิต เหล่าวัฒนา ผู้อํานวยการสถาบันวิทยาการหุ่นยนต์ภาคสนาม (FIBO)มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี โทรศัพท์ 0-2470-9339, 0-2470-9691 โทรสาร 0-2470-9691E-mail: [email protected]
อาจารย์บุญเลียง อบแสงทอง (วัสดุและอุปกรณ์การแข่งขัน) สํานักงานคณะกรรมการอาชีวศึกษาโทรศัพท์ 0-2944-4343-4 โทรสาร 0-2944-2672 มือถือ 086-565-3953 E-mail: [email protected]
13.4 การแจ้งถึงการเปลี่ยนกฎข้อบังคับจะแจ้งทาง web site
13.5 กรรมการมีสิทธิ์ขอคําอธิบายเพิ่มเติมในเรื่องความปลอดภัยเมื่อหุ่นยนต์น่าสงสัย
13.6 ห้ามติดต่อสื่อสารกันระหว่างผู้ร่วมทีมโดยใช้คลื่นวิทยุสื่อสารหรือเครื่องขยายเสียงในระหว่างการแข่งขัน
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
20 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

Appendix
1. สีและวัสดุของพื้นสนามแข่งขัน
รายการ สี วัสดุ
Game Area Light green Pantone 364 U
Vinyl Sheet
Checkpoints Green Pantone 342 U
Mountain Pass Brown Pantone 1807 U
Goal Zone Gray Pantone 426 U
Drum Zone Light gray Pantone 424 U
Safety Area Light blue Pantone 2975 U
Start Zone & Lodge Red Pantone 1807 C
PVC filmStart Zone & Lodge Blue Pantone 287 C
White Liners White
2. ตัวอย่างของวัสดุอุปกรณ์ที่ใช้ในการแข่งขัน
ผู้จัดการแข่งขัน ABU Asia-Pacific Robot Contest 2009 Tokyo จะดําเนินการส่งตัวอย่างของ Kago (สําหรับทีมสีแดง 1 ชุด และ ทีมสีน้ําเงิน 1 ชุด) ที่ใช้ในการแข่งขันให้กับแต่ละประเทศที่เข้าร่วมการแข่งขัน การส่งตัวอย่างของพื้นสนามจะดําเนินการก็ต่อเมื่อมีการขอจากผู้จัดแต่ละประเทศ รายละเอียดจะติดต่อโดยทางอีเมล์
3. การส่งหุ่นยนต์เข้าร่วมการแข่งขัน
3.1 รายละเอียดจะแจ้งให้ทราบต่อไป
3.2 ขนาดของหุ่นยนต์จะต้องบรรจุในกล่องได้ ขนาด 1,500x1,500x1,500 mm จํานวน 1 กล่อง
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
21 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 1 ขนาดสนามแข่งขัน (Field)
!ABU Robocon 2009 Tokyo
"#$%&'()*+(,&
-#./+01)2.3&
-&4+10
5'.,&
67&'8&9
2$:
-#./
-.(&
!;<=
>==?:?:?
競技フィールド
30
270
30
12000
12600
12
60
0
@<==
@><=
@><=
@!>
@A==
@!>
@A==
BCDEFDG
65!>!HDIJKD
LMN
65!>!HDIJKD
OPGB)Q!==R
-S6A=?TU
VDWFDG
HGXYZ[\DGA]=?
^_!
HGXYZ[\DGA!!]
`HGXYZ[\DGA!=]
^_>
HGXYZ[\DGA!!]
OPGB)Q!==
-S6A=?TU
LMN
65<>AJXGaWD
bcdEedG
65f!!bcdE
@=
@A==
@=
@A==
60
00
3000
1000
BCDEFDG
65<>AJXGaWD
^_A
HGXYZ[\DGA!!]
g-S6><]fTU
g-S6>h?<TU
bcdEedG
65f!!bcdE
10
00
10
00
20
00
10
00
ijFDG
HGXYZ[\DGA!!k
1500500500
lmnXo
HGXYZ[\DGA<!=
pqrij
2966
18
53
2006
16002000
75
0
800
75
01
20
0
75
0
3000
500
50
0
20
00
1000
20
00
1000
500500
1500
500
@=
@A==
@=
@A==
2500
stnXo
HGXYZ[\DGAk!=
uDW!
uDW>
uDWA
uDW!
uDW>
uDWA
Sta
rt Zone
white
line
Lodge
Checkpoin
t 1
Checkpoin
t 3
Mounta
in P
ass
Woods
Checkpoin
t 2
Vic
tory
Dru
ms
Dru
m Z
one
Goal Z
one
Sta
rt Zone
Lodge
fence
Safe
ty A
rea
fence
Gam
e A
reaField
pole
1
pole
2
pole
3
white
line
pole
1
pole
2
pole
3
ABU Asia-Pacific Robot Contest 2009 TokyoHost Organising Com
mittee
Fence d
ivid
ing re
d a
nd b
lue
Kago Z
one e
nds h
ere
.
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
22 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 2 บริเวณการแข่งขัน (Area) และโซน (Zone)
!ABU Robocon 2009 Tokyo
"#$%&'()*+(,&
-#./+01)2.3&
-&4+10
5'.,&
67&'8&9
2$:
-#./
-.(&
;<=>
!>>?:?:?
競技フィールドの構成
@ABCD
EFGCHI
@ABCD
EJGCHI
KLMNO
PCQBCD
RSBCD
TUMNO
Safe
ty A
rea
Dru
m Z
one
Goal Z
one
Kago Z
one
(red te
am
)
Kago Z
one
(blu
e te
am
)
Gam
e A
rea
Areas and ZonesABU Asia-Pacific Robot Contest 2009 Tokyo
Host Organising Committee
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
23 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 3 ภาพสามมิติของสนาม
!"#$%&'()*'+%
,"-.*/0(1-2%
,%3*0/
4&-+%
56%&7%8
1#9
,"-.
,-'%
:;<=
>==?9?9?
競技フィールド パース
ABU Robocon 2009 Tokyo@
ABU Asia-Pacific Robot Contest 2009 TokyoHost Organising Com
mittee
Perspective View
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
24 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 4 ขนาดเส้นทางภูเขา (Mountain Pass)
10
00
10
00
10
00
1200
!"##
!#$%$!"##
!"##$%$!#
30
00
10
00
10
00
10
00
16.70°
16.70°
1044
492
30
30
492
47
04
70
30
30
492
30
492
1044
470470 8585
8547047085
300
&&&$"#''()*+,*-./
012
013
()*+,*-456733()*+
8-9:;<=>-"3#?
8-9:;<=>-"3#?
@ABC
DEF
GEF
013
012
HIJKLMN4OPNQL
RISTPUV4WS'L
RLXPVU
6MSQL
5YLMZL[
WJ\
RIST
RSNL
3]2#
2##^\^\^
「峠」 詳細図
_ABU Robocon 2009 Tokyo
Pla
n
Sid
e V
iew
30m
m w
ide w
hite
line
Dimensions of M
ountain Pass
Checkpoin
t 2
Checkpoin
t 1
Checkpoin
t 1
Checkpoin
t 2
white
line
vin
yl s
heet
ply
wood p
ain
ted b
row
n
ABU Asia-Pacific Robot Contest 2009 TokyoHost Organising Com
mittee
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
25 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 5 ขนาดเสา ในเส้นทางเดินป่า (Woods)
17
6.3
4.5
76
.3
50
50
700
100
76
.3
76.3
176.3
600
60
0
!"#
$"#
16
%&'()*+
,-./012234522
%&6789*:97;<=>22
?@ABCDE9@;<=022
FG:HI;<=J22
FG:HI;<=-022
%&'()*+
,-./012234522
K89C;LMN0OP1QR
S89C;LMN01>5QR
TUVWXY<3Z[<\X
LU][̂_3̀a]2X
LXb[`_
cY]\X
NdXYeXf
aVg
LU]^
L]<X
-h1
0..PgPgP
「林」 詳細図
1ABU Robocon 2009 Tokyo
Fix
ed h
exagonal b
olt
(M1
0x2
5m
m,h
ead p
rotru
des 7
mm
)
Fix
ed ste
el b
ase
(9m
m th
ick)
Fix
ed h
exagonal b
olt
(M1
0x2
5m
m,h
ead p
rotru
des 7
mm
)
3m
m th
ick p
lyw
ood b
ase
12m
m th
ick p
lyw
ood b
ase
Pla
nSid
e V
iew
Dimensions of W
oodsABU Asia-Pacific Robot Contest 2009 Tokyo
Host Organising Committee
vin
yl sh
eet
pain
ted re
d fo
r red te
am
pain
ted b
lue fo
r blu
e te
am
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
26 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 6 ขนาด Goal Zone
!!!"#$%%&'()*(+,-
.+/01234+#5$6
789
:89
250 250
10
00
20
00
10
00
1415
70
57
05
;<=$
;<=$
;=$$
350
70
57
05
475
175
59
0
50
50
30
100
20
52
20
50
50
20
52
20
100
30
470
45
5470
47
0
30
>?@<=<ABC
D7EFGH
.+/01234+#5$6IJBC
KLMNOPQRSTQUO
>LVWTXYRZV%O
>O[TYX
\PVUO
@]OP^O_
ZM`
>LVW
>VQO
ab<$
<$$6`6`6
「ゴールゾーン」 詳細図
cABU Robocon 2009 Tokyo
Fro
nta
l vie
w
Pla
n
30m
m w
ide w
hite
line
Dimensions of Goal Zone
ABU Asia-Pacific Robot Contest 2009 TokyoHost Organising Com
mittee
vin
yl s
heet
pain
ted b
row
n
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
27 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 7 ขนาดกลองชัย (Victory Drums)
1096
40
1243012530
3030
12
70
90
40
52
0
30
30
60
59
0
30
30
40
460530
30
12
30
30
4012
33
0
39
0
47
530
40
40
!"#
$"#
%&'(
")**+,-.))*,/0-1)2*
%34&'(
")5*+,-.)6*,/0-178*
%37&'(
"74*+,-.728,/0-184*
9:;<=>?@A
4*B4*,C5*
90
70
'(DEFGHI
JKLMNOPQRSTUVNW
1413
33
0
39
0
85
11
0
40
360300
420
1224
783
272
XYZ[\]^_̀ab̂\
cYdeafg_hdi\
c\jagf
k]db\
lm\]n\o
hZ3
cYde
cd^\
%p%*
4**q3q3q
「勝利の太鼓」 詳細図
2ABU Robocon 2009 Tokyo
Non-slip
rubber(2
0x2
0 W
60
)
Wooden d
rum
stand
(coate
d w
ith m
ediu
m g
loss a
rtificia
l resin
)
Fro
nta
l vie
wSid
e V
iew
Dimensions of Victory Drum
sABU Asia-Pacific Robot Contest 2009 Tokyo
Host Organising Committee
rd]\,+)**ii__>\fg^m_))*ii
sdtaiui_oadi\^\Y_Zv_oYui_wZox_)2*ii_
rd]\,+)5*ii__>\fg^m_)6*ii
sdtaiui_oadi\^\Y_Zv_oYui_wZox_78*ii_
rd]\,+74*ii__>\fg^m_728ii
sdtaiui_oadi\^\Y_Zv_oYui_wZox_84*ii_
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
28 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท

รูปที่ 8 ขนาด Kago
!"#$%&'()*'+%
,"-.*/0(1-2%
,%3*0/
4&-+%
56%&7%8
1#9
,"-.
,-'%
:;;<9<9<
「かご」 詳細図
<ABU Robocon 2009 Tokyo
800
=>=?
50
0
800
20
00
30
75
07
30
50
0
30
12
@AB
23
02
30
842
CDEFG,H5:I<?JK
LMNOPQ
)R1)S5()1(1TUV?
WXYZW[\]^
=9?22_
12
40
`(a;22bI;22(
,H5c?aJK
30
30
dAB
40
40
eAB
500
2000
40
23
02
30
750 750
40 40
50
0
fJK
9.5
30
40
29
29
1.6
2
29
29
1.6
2
12
9.5
ghij
[\]^klmnAB
ghij
[\]^klm@AB
gopqj
[\]^klm@AB
gopqj
[\]^klmnAB
10 5
05
0
50
50
10
10
10
50
50
501
0
10
50
50
1010
50
50
1010
=9?22r
sQOtuYv
=9?22r
sQOtuYv
wxya22Akz{
wxya22Akz{
ab
aa
bb
Pla
n
Cro
ss Bar (F
ronta
l vie
w fo
r wire
atta
chm
ent)
a
Cro
ss Bar (P
lan v
iew
for w
ire a
ttachm
ent)
a
Cham
fere
d 3
mm
from
end
Fro
nta
l vie
wSid
e V
iew
Seat (F
ronta
l vie
w fo
r wire
atta
chm
ent)
b
Seat (P
lan v
iew
for w
ire a
ttachm
ent)
b
Cro
ss B
ar
Should
er P
ole
Rope(sta
inle
ss s
teel w
ire)
Seat
Cham
fere
d 3
mm
from
end
Dimensions of Kago
white
line
ABU Asia-Pacific Robot Contest 2009 TokyoHost Organising Com
mittee
Alu
min
um
Cla
mp
Alu
min
um
Cla
mp
ร่วมตะลุย ลั่นกลองชัย แปลโดย รศ.ดร.สถาพร ลักษณะเจริญ Travel together for the victory drums email: [email protected]
29 สถานีโทรทัศน์โมเดิร์นไนน์ บมจ. อสมท