Embed Size (px)
Citation preview

Standardization of ITS 1・2
Framework of Standardization 3・4
The Latest Trend of Automated Driving 5・6
Cross-cutting Activities of TC204 7・8
Activities of the TC 204 Working Groups 9~41
Standardization Activities in Europe 42
Related Standardization Activities 43~47
Development of International Standards 48
List of Work Items 49~58
Venues of TC 204 Plenary Meetings 58
ITS StandardizationActivities in Japan
2016
S t a n d a r d i z a t i o n o f I n t e l l i g e n t T r a n s p o r t S y s t e m s
Standardization of ITS 1・2
Framework of Standardization 3・4
The Latest Trend of Automated Driving 5・6
Cross-cutting Activities of TC204 7・8
Activities of the TC 204 Working Groups 9~41
Standardization Activities in Europe 42
Related Standardization Activities 43~47
Development of International Standards 48
List of Work Items 49~58
Venues of TC 204 Plenary Meetings 58
ITS StandardizationActivities in Japan
2016
S t a n d a r d i z a t i o n o f I n t e l l i g e n t T r a n s p o r t S y s t e m s

ITS (Intelligent Transport Systems) has been developed to solve various issues, such as road traffic safety, transport efficiency, and environmental measures, by using communi-cation technologies to exchange information between people, infrastructure and vehicles. ITS enables optimization of the road traffic, elimination of road accidents and traffic jams, and co-existence with energy conservation and environment by utilizing the state-of-the-art communication and control technologies.
With a wide variety of related technologies and its charac-teristic known as a project that can drastically change the social system, ITS has potential to create new industries and markets.
We refer to activities to minimize, simplify, and put in order things, whenever possible, that, if left alone, would become diversified, complex, or chaotic, as "standardization".
Standardization provides a number of benefits, such as improvement of technological competence and quality, enhancement of operational efficiency, cost reduction, and more.
Standardization of ITS
. Securing the compatibility of products
. Assurance of interface
. Improvement of production efficiency
. Assurance of quality
. Accurate communication, promotion of mutual understanding
. Prevalence of technologies from research and development
. Assurance of safety and security
. Reduction of environmental burden
. Enhancement of industrial competitive strength, preparation of competitive environment. Promotion of trade, and more
Key roles of standardization:
People
Improvement of safety
Reduction of environmental burden
Enhancement of convenience and comfort
Infrastructure Vehicles
Recent rising expectations for the early and proactive de-ployment of ITS have made it critical, from the standpoint of ensuring user convenience, to reduce costs while promoting the standardization of the various basic technologies without sacrificing the interoperability and expandability of the sys-tems and, at the same time, smoothly introducing the social
What are standardization and standards?・What is standardization?
Texts comprising of rules defined to promote standardiza-tion are generally referred to as the "standard".
Although the "standard" has no binding power unlike law, it has become essential as the infrastructure of today's industrial society (despite a lack of binding power, when materials/parts are bought and sold between companies, for instance, the buying party may exert binding power in the form of required specifications against the selling party).
Note that what are defined in the given standard are something like "one-size-fits-all" of technologies and know-how that exist at the particular time (but always updated by regular review and revision), so that companies, based on the nature of the standard, become to add their own factors or values to differentiate themselves from competitors' prod-ucts. As a result, the standard would significantly contribute
・What are standards?
system represented by ITS.While respecting international trends, a proactive ap-
proach to international standardization activities that sets environmentally-friendly Japanese ITS technologies as pen global standards must be adopted to strengthen the global competitiveness of Japanese ITS corporations.
ITS supports the movement of people and goods on a va-riety of levels. The core technology of ITS are information and telecommunication technologies.
As shown in the figure below, ITS international standard-ization is carried out by ISO, IEC, JTC and ITU. ISO/TC 204 committee, in particular, specializes in ITS standardization activities.
Under study at ISO/TC 204 are standardization proposals for (1) system architecture, (2) interfaces (message sets, etc.), (3) frameworks (data dictionaries and message tem-
plates), (4) system performance requirements, and (5) test methods. This booklet describes the present state of ITS standardization, with a focus on ISO/TC 204 activities.
The scope of ISO/TC 204 is as follows: standardization of information, communication and control systems in the field of urban and rural surface transportation, including intermo-dal and multi-modal aspects thereof, traveller information, traffic management, public transport, commercial transport, emergency and commercial services in the field of ITS.
Information-communicationtechnology
to enhancement of competitive strength of products while playing a role of technological base for them.
Relationship between ITS standardization organizations
AASHTO: American Association of State Highway and Transportation OfficialsANSI: American National Standards InstituteASTM: American Society for Testing and MaterialsCEN: European Committee for StandardizationCENELEC: European Committee for Electrotechnical StandardizationEC: European CommissionEIA: Electronic Industries AllianceETSI: European Telecommunications Standards InstituteIEC: International Electrotechnical CommissionIEEE: Institute of Electrical and Electronic EngineersISO: International Organization for StandardizationISSS: Information Society Standardization SystemITE: Institute of Transportation Engineers
ITS-A: intelligent Transport System AmericaITU-R: International Telecommunication Union-Radio Communication SectorJISC: Japanese Industrial Standards CommitteeJTC: Joint Technical CommitteeNEMA: National Electrical Manufacturers' AssociationSAE: Society of Automotive EngineersSC: Sub CommitteeSG: Sub GroupTAG: Technical Advisory GroupTC: Technical CommitteeTIA: Telecommunications Industry Association
Inter-nationallevel
Japan
America
Europe
Fields other than electrical and electronics technology
ISO: International Organization for Standardization
Field of Information technology
JTC: Joint Technical Committee
Field of electrical and electronics technology
IEC: International Electrotechnical Commission
Field of electrical telecommunications
ITU: International Telecommunication Union
JTC 1: Information Technology
SC27: IT Security techniques SC31: Automatic identification and data capture techniques SC32: Data management and interchange
ITU-R/SG 4 (Satellite services)
ITU-R/SG 5 (Terrestrial services)
ITU-R/SG 6 (Broadcasting services)
TC 9: Electrical equipment and systems for railways
Japanese Industrial Standards Committee
JTC 1 National Committee TC 9 National Committee
InformationCommunication
Council
ITS National Committee
SAE IEEE ITE AASHTO ASTM NEMA TIA EIA
CENISSS (TC 278, ...)
EC
CENELEC ETSI
Subcommittees
ANSI
ITS-A TAG
TC8: Ships and marine technologyTC22: Road vehiclesTC23: Tractors and machinery for agriculture and forestryTC104: Freight containersTC122: PackagingTC154: Processes, data elements and documents in commerce, industry and administrationTC204: Intelligent transport systemsTC211: Geographic information/GeomaticsTC241: Road traffic safety management systemsTC269: Railway applicationsPC286: Collaborative business relationship management -- Framework
What is ITS?
Standardization of ITS
Landscape of standardization of ITS (related standardization bodies)
page
1

ITS (Intelligent Transport Systems) has been developed to solve various issues, such as road traffic safety, transport efficiency, and environmental measures, by using communi-cation technologies to exchange information between people, infrastructure and vehicles. ITS enables optimization of the road traffic, elimination of road accidents and traffic jams, and co-existence with energy conservation and environment by utilizing the state-of-the-art communication and control technologies.
With a wide variety of related technologies and its charac-teristic known as a project that can drastically change the social system, ITS has potential to create new industries and markets.
We refer to activities to minimize, simplify, and put in order things, whenever possible, that, if left alone, would become diversified, complex, or chaotic, as "standardization".
Standardization provides a number of benefits, such as improvement of technological competence and quality, enhancement of operational efficiency, cost reduction, and more.
Standardization of ITS
. Securing the compatibility of products
. Assurance of interface
. Improvement of production efficiency
. Assurance of quality
. Accurate communication, promotion of mutual understanding
. Prevalence of technologies from research and development
. Assurance of safety and security
. Reduction of environmental burden
. Enhancement of industrial competitive strength, preparation of competitive environment. Promotion of trade, and more
Key roles of standardization:
People
Improvement of safety
Reduction of environmental burden
Enhancement of convenience and comfort
Infrastructure Vehicles
Recent rising expectations for the early and proactive de-ployment of ITS have made it critical, from the standpoint of ensuring user convenience, to reduce costs while promoting the standardization of the various basic technologies without sacrificing the interoperability and expandability of the sys-tems and, at the same time, smoothly introducing the social
What are standardization and standards?・What is standardization?
Texts comprising of rules defined to promote standardiza-tion are generally referred to as the "standard".
Although the "standard" has no binding power unlike law, it has become essential as the infrastructure of today's industrial society (despite a lack of binding power, when materials/parts are bought and sold between companies, for instance, the buying party may exert binding power in the form of required specifications against the selling party).
Note that what are defined in the given standard are something like "one-size-fits-all" of technologies and know-how that exist at the particular time (but always updated by regular review and revision), so that companies, based on the nature of the standard, become to add their own factors or values to differentiate themselves from competitors' prod-ucts. As a result, the standard would significantly contribute
・What are standards?
system represented by ITS.While respecting international trends, a proactive ap-
proach to international standardization activities that sets environmentally-friendly Japanese ITS technologies as pen global standards must be adopted to strengthen the global competitiveness of Japanese ITS corporations.
ITS supports the movement of people and goods on a va-riety of levels. The core technology of ITS are information and telecommunication technologies.
As shown in the figure below, ITS international standard-ization is carried out by ISO, IEC, JTC and ITU. ISO/TC 204 committee, in particular, specializes in ITS standardization activities.
Under study at ISO/TC 204 are standardization proposals for (1) system architecture, (2) interfaces (message sets, etc.), (3) frameworks (data dictionaries and message tem-
plates), (4) system performance requirements, and (5) test methods. This booklet describes the present state of ITS standardization, with a focus on ISO/TC 204 activities.
The scope of ISO/TC 204 is as follows: standardization of information, communication and control systems in the field of urban and rural surface transportation, including intermo-dal and multi-modal aspects thereof, traveller information, traffic management, public transport, commercial transport, emergency and commercial services in the field of ITS.
Information-communicationtechnology
to enhancement of competitive strength of products while playing a role of technological base for them.
Relationship between ITS standardization organizations
AASHTO: American Association of State Highway and Transportation OfficialsANSI: American National Standards InstituteASTM: American Society for Testing and MaterialsCEN: European Committee for StandardizationCENELEC: European Committee for Electrotechnical StandardizationEC: European CommissionEIA: Electronic Industries AllianceETSI: European Telecommunications Standards InstituteIEC: International Electrotechnical CommissionIEEE: Institute of Electrical and Electronic EngineersISO: International Organization for StandardizationISSS: Information Society Standardization SystemITE: Institute of Transportation Engineers
ITS-A: intelligent Transport System AmericaITU-R: International Telecommunication Union-Radio Communication SectorJISC: Japanese Industrial Standards CommitteeJTC: Joint Technical CommitteeNEMA: National Electrical Manufacturers' AssociationSAE: Society of Automotive EngineersSC: Sub CommitteeSG: Sub GroupTAG: Technical Advisory GroupTC: Technical CommitteeTIA: Telecommunications Industry Association
Inter-nationallevel
Japan
America
Europe
Fields other than electrical and electronics technology
ISO: International Organization for Standardization
Field of Information technology
JTC: Joint Technical Committee
Field of electrical and electronics technology
IEC: International Electrotechnical Commission
Field of electrical telecommunications
ITU: International Telecommunication Union
JTC 1: Information Technology
SC27: IT Security techniques SC31: Automatic identification and data capture techniques SC32: Data management and interchange
ITU-R/SG 4 (Satellite services)
ITU-R/SG 5 (Terrestrial services)
ITU-R/SG 6 (Broadcasting services)
TC 9: Electrical equipment and systems for railways
Japanese Industrial Standards Committee
JTC 1 National Committee TC 9 National Committee
InformationCommunication
Council
ITS National Committee
SAE IEEE ITE AASHTO ASTM NEMA TIA EIA
CENISSS (TC 278, ...)
EC
CENELEC ETSI
Subcommittees
ANSI
ITS-A TAG
TC8: Ships and marine technologyTC22: Road vehiclesTC23: Tractors and machinery for agriculture and forestryTC104: Freight containersTC122: PackagingTC154: Processes, data elements and documents in commerce, industry and administrationTC204: Intelligent transport systemsTC211: Geographic information/GeomaticsTC241: Road traffic safety management systemsTC269: Railway applicationsPC286: Collaborative business relationship management -- Framework
What is ITS?
Standardization of ITS
Landscape of standardization of ITS (related standardization bodies)
page
2

TC 204, the technical committee for ITS standardization within the ISO, was set up in 1992 and went into operation the following year. In general, subcommittees (SC) are set up under technical committees (TC) and working groups (WG) under subcommittees, working groups are set under the direct jurisdiction within TC 204. Some working groups have been suspended or merged during the years since the inception of TC 204, and there are currently 12 active working groups. Nine countries serve as lead countries for the working groups, with Japan and the United Kingdom leading two groups, and the U.S. leading three.
As shown in the list below, TC204 has published many international standards. (As of June 2016)
Overview of ISO/TC204The ISO (and IEC) allows participation of only one member organization per country. Based on the approval of the Cabinet Office, Japan is represented by the Japanese Industrial Standards Committee (JISC). Within Japan, the ITS Standardization Committee (National Committee) set up under the auspices of the Society of Automotive Engineers of Japan (JSAE) carries out ISO/TC 204 international standardization activities on behalf of the Japanese Industrial Standards Committee (JISC). Standardization proposals are set forward concerning items on the ISO/TC 204 activities. The main tasks of the Committee are to (1) act swiftly in response to changes in the standardiation environment, (2)
carry out standardization activities in accordance with the established strategy, (3) provide assistance with national standardization(JIS), and (4) provide related parties with up-to-date information. The Committee sorted out standard-ization trends in and outside Japan and drew up the
"Five-year Plan of Strategic International Standardization 2016", which organizes strategies and action plans for each working group. It has also been actively collaborating with the ITS Info-Communications Forum out of a need to address the WG 10 proposal on TPEG traveler information messages digital media broadcast, and the wide-and medium-area communications CALM standard proposal by WG 16.
ITS Standardization Committee of Japan
ISO/TC 204 Organization
Algeria, Organization Bulgaria, Chile, Colombia, Congo, Croatia, Cuba, Cyprus, Denmark, Egypt, Finland, Greece, Hong Kong China, Indonesia, Ireland, Israel, Mongolia, Montenegro, Pakistan, Philippines, Poland, Romania, Serbia, Singapore, Slovakia, Sri Lanka, Thailand, Turkey
WG 1 : Architecture USA
Automatic vehicle andequipment identificationWG 4 : Norway
WG 5 : Fee and toll collection SwedenGeneral fleet managementand commercial/freightWG 7 : Canada
WG 8 : Public transport/emergency USA
WG 3 : ITS databese technology Japan
Integrated transport information,management and contorolWG 9 : Australia
Vehicle/roadway warningand control systemsWG 14: Japan
WG 16: Communications USA
WG 17: Nomadic Devices in ITS Systems Korea
WG 18: Cooperative systems Germany
WG 10: Traveller information systems UK
Observing members (28 countries):Follow operations as an observer with the right to submit comments and attend the meetings.
Australia, Austria, Belarus, Belgium, Canada, China, Czech Republic, France, Germany, Hungary, India, Islamic Republic of Iran, Israel, Italy, Japan, Republic of Korea, Malaysia, Netherlands, New Zealand, Norway, Russian Federa-tion, Sierra Leone, South Africa, Spain, Sweden, Switzerland, Macedonia, United Kingdom, United States of America
Participating members (28 countries):Contribute to the meetings, participate actively to the work, and have the obligation to vote
Working Group
Internal Liaison Committees Liaison Organizations
ConvenerISO/TC204 Chairperson
Secretariat : ITS America
APEC Asia Pacific Economic Cooperation
CEN/ TC 278 Intelligent transport systems ETSI European Telecommunication
IEEE Institute of Electrical and
ITU International Telecommunication Union
OGC International Geographical Union
SAE SAE International
TISA Traffic and travel information service union
ISOC Internet Association
Framework of Standardization
TC 8 Ships and marine technology
TC 22 Road vehicles
TC 23 Tractors and machinery for
TC 104 Freight containers
TC 122 Packaging
TC 154 Government/commercial/industrial
TC 211 Geographic information/Geomatics
TC 241 Road traffic safety management systems
TC 269 Railway applications
PC 286 Collaborative business relationship
JTC 1 Information Technology
Scope:Standardization of information, communication and control sys-tems in the field of urban and rural surface transportation, including intermodal and multimodal aspects thereof, traveller information, traffic management, public transport, commercial transport, emer-gency services and commercial services in the intelligent transport systems (ITS) field.
Excluded : in-vehicle transport information and control systems (ISO / TC 22).
Note : ISO / TC 204 is responsible for the overall system aspects and infrastructure aspects of intelligent transport systems (ITS), as well as the coordination of the overall ISO work programme in this field including the schedule for standards development, taking into account the work of existing international standardiza-tion bodies.
Deliverable
International Standard
Technical Specification
Publically Available Specification
Technical Report
Total
Published Under development
117
66
1
36
220
119
30
0
16
165
agriculture and forestry
forms and description items
management - Framework
Standards Institute
Electronic Engineers
ITS Standardization Committee Organization
Architecture (WG 1)
ITS Database Technology (WG 3)
Automatic Vehicle and Equipment Identification (WG 4)
Fee and Toll Collection (WG 5)
General Fleet Management and Commercial/ Freight (WG 7)
Public Transport/Emergency (WG 8)
Integrated Transport Information, Management and Control (WG 9)
Traveler Information Systems (WG 10)
Vehicle/ Roadway Warning and Control Systems (WG 14)
Communications (WG 16)
Nomadic Devices in ITS Systems (WG 17)
Cooperative ITS (WG 18)
System Human Interface
Japan Automobile Research Institute
Japan Digital Road Map Association
Universal Traffic Management Society of Japan
Highway Industry Development Organization
Highway Industry Development Organization
Japan Institute of Constructions Engineering
Universal Traffic Management Society of Japan
Universal Traffic Management Society of Japan
Society of Automotive Engineers of Japan
Highway Industry Development Organization
Society of Automotive Engineers of Japan
ITS Info-Communications Forum[Secretariat]
Association of Radio Industriesand Businesses
Working Groups
Liaison
Secretariat
ITS StandardizaitonCommittee*1
Technicalcommittee*2
Secretariat: Society ofAutomotive Engineers of Japan
*1: Comprising 30 members, including manufacturers, consumers and neutral parties*2: Comprising some 30 members, including WG representatives, liaison persons and experts
• Discussion on standardization drafts• Responses to international working groups
• Planning the strategies for ITS standardization• Discussion on drafts
Japan Electronics and Information TechnologyIndustries AssociationJapan Electronics and Information TechnologyIndustries Association
• Confirmation of progress in work by subcommittees
• Information exchange
page
3

TC 204, the technical committee for ITS standardization within the ISO, was set up in 1992 and went into operation the following year. In general, subcommittees (SC) are set up under technical committees (TC) and working groups (WG) under subcommittees, working groups are set under the direct jurisdiction within TC 204. Some working groups have been suspended or merged during the years since the inception of TC 204, and there are currently 12 active working groups. Nine countries serve as lead countries for the working groups, with Japan and the United Kingdom leading two groups, and the U.S. leading three.
As shown in the list below, TC204 has published many international standards. (As of June 2016)
Overview of ISO/TC204The ISO (and IEC) allows participation of only one member organization per country. Based on the approval of the Cabinet Office, Japan is represented by the Japanese Industrial Standards Committee (JISC). Within Japan, the ITS Standardization Committee (National Committee) set up under the auspices of the Society of Automotive Engineers of Japan (JSAE) carries out ISO/TC 204 international standardization activities on behalf of the Japanese Industrial Standards Committee (JISC). Standardization proposals are set forward concerning items on the ISO/TC 204 activities. The main tasks of the Committee are to (1) act swiftly in response to changes in the standardiation environment, (2)
carry out standardization activities in accordance with the established strategy, (3) provide assistance with national standardization(JIS), and (4) provide related parties with up-to-date information. The Committee sorted out standard-ization trends in and outside Japan and drew up the
"Five-year Plan of Strategic International Standardization 2016", which organizes strategies and action plans for each working group. It has also been actively collaborating with the ITS Info-Communications Forum out of a need to address the WG 10 proposal on TPEG traveler information messages digital media broadcast, and the wide-and medium-area communications CALM standard proposal by WG 16.
ITS Standardization Committee of Japan
ISO/TC 204 Organization
Algeria, Organization Bulgaria, Chile, Colombia, Congo, Croatia, Cuba, Cyprus, Denmark, Egypt, Finland, Greece, Hong Kong China, Indonesia, Ireland, Israel, Mongolia, Montenegro, Pakistan, Philippines, Poland, Romania, Serbia, Singapore, Slovakia, Sri Lanka, Thailand, Turkey
WG 1 : Architecture USA
Automatic vehicle andequipment identificationWG 4 : Norway
WG 5 : Fee and toll collection SwedenGeneral fleet managementand commercial/freightWG 7 : Canada
WG 8 : Public transport/emergency USA
WG 3 : ITS databese technology Japan
Integrated transport information,management and contorolWG 9 : Australia
Vehicle/roadway warningand control systemsWG 14: Japan
WG 16: Communications USA
WG 17: Nomadic Devices in ITS Systems Korea
WG 18: Cooperative systems Germany
WG 10: Traveller information systems UK
Observing members (28 countries):Follow operations as an observer with the right to submit comments and attend the meetings.
Australia, Austria, Belarus, Belgium, Canada, China, Czech Republic, France, Germany, Hungary, India, Islamic Republic of Iran, Israel, Italy, Japan, Republic of Korea, Malaysia, Netherlands, New Zealand, Norway, Russian Federa-tion, Sierra Leone, South Africa, Spain, Sweden, Switzerland, Macedonia, United Kingdom, United States of America
Participating members (28 countries):Contribute to the meetings, participate actively to the work, and have the obligation to vote
Working Group
Internal Liaison Committees Liaison Organizations
ConvenerISO/TC204 Chairperson
Secretariat : ITS America
APEC Asia Pacific Economic Cooperation
CEN/ TC 278 Intelligent transport systems ETSI European Telecommunication
IEEE Institute of Electrical and
ITU International Telecommunication Union
OGC International Geographical Union
SAE SAE International
TISA Traffic and travel information service union
ISOC Internet Association
Framework of Standardization
TC 8 Ships and marine technology
TC 22 Road vehicles
TC 23 Tractors and machinery for
TC 104 Freight containers
TC 122 Packaging
TC 154 Government/commercial/industrial
TC 211 Geographic information/Geomatics
TC 241 Road traffic safety management systems
TC 269 Railway applications
PC 286 Collaborative business relationship
JTC 1 Information Technology
Scope:Standardization of information, communication and control sys-tems in the field of urban and rural surface transportation, including intermodal and multimodal aspects thereof, traveller information, traffic management, public transport, commercial transport, emer-gency services and commercial services in the intelligent transport systems (ITS) field.
Excluded : in-vehicle transport information and control systems (ISO / TC 22).
Note : ISO / TC 204 is responsible for the overall system aspects and infrastructure aspects of intelligent transport systems (ITS), as well as the coordination of the overall ISO work programme in this field including the schedule for standards development, taking into account the work of existing international standardiza-tion bodies.
Deliverable
International Standard
Technical Specification
Publically Available Specification
Technical Report
Total
Published Under development
117
66
1
36
220
119
30
0
16
165
agriculture and forestry
forms and description items
management - Framework
Standards Institute
Electronic Engineers
ITS Standardization Committee Organization
Architecture (WG 1)
ITS Database Technology (WG 3)
Automatic Vehicle and Equipment Identification (WG 4)
Fee and Toll Collection (WG 5)
General Fleet Management and Commercial/ Freight (WG 7)
Public Transport/Emergency (WG 8)
Integrated Transport Information, Management and Control (WG 9)
Traveler Information Systems (WG 10)
Vehicle/ Roadway Warning and Control Systems (WG 14)
Communications (WG 16)
Nomadic Devices in ITS Systems (WG 17)
Cooperative ITS (WG 18)
System Human Interface
Japan Automobile Research Institute
Japan Digital Road Map Association
Universal Traffic Management Society of Japan
Highway Industry Development Organization
Highway Industry Development Organization
Japan Institute of Constructions Engineering
Universal Traffic Management Society of Japan
Universal Traffic Management Society of Japan
Society of Automotive Engineers of Japan
Highway Industry Development Organization
Society of Automotive Engineers of Japan
ITS Info-Communications Forum[Secretariat]
Association of Radio Industriesand Businesses
Working Groups
Liaison
Secretariat
ITS StandardizaitonCommittee*1
Technicalcommittee*2
Secretariat: Society ofAutomotive Engineers of Japan
*1: Comprising 30 members, including manufacturers, consumers and neutral parties*2: Comprising some 30 members, including WG representatives, liaison persons and experts
• Discussion on standardization drafts• Responses to international working groups
• Planning the strategies for ITS standardization• Discussion on drafts
Japan Electronics and Information TechnologyIndustries AssociationJapan Electronics and Information TechnologyIndustries Association
• Confirmation of progress in work by subcommittees
• Information exchange
page
4

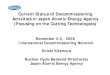
Expected time frame for the commercialization of automated driving systems on highways, etc
Expected time frame for realization of driverless automated driving transit service in limited areas
Source: Public-Private ITS Initiative/Roadmaps 2016 (The Strategic Headquarters for the Promotion of an Advanced Information and Telecommunications Network Society, May 20th, 2016)
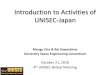
The automated driving car project funded by European Commission
Source: ITS World Congress 2015 SW1 Horizon 2020 Call on “Automated Road Transport” 2015.10.6
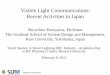
Source: https://www.google.com/selfdrivingcar
A self-driving car of Google Inc.
The Latest Trend of Automated DrivingJapan, United States, and Europe are competing to develop and materialize vehicles equipped with automated driving systems, which is drawing significant attention. The recent major topics are shown here.
Based on rapid industrial/technological changes in relation to the automated driving technology, Public-Private ITS Initiative/Roadmaps 2016 has been developed with extensive revision from the previous 2015 version. The key feature of the new 2016 version is the descrip-tion about the specific roadmap and agenda in order specifically to realize "Automated driving on highways" and "Regionally-limited driverless automated driving transit service" by 2020.
In "Automated driving on highways", semi-autopilot (automated driving from the entrance to the exit on a highway under the supervi-sion of the driver) is planned to be introduced to market by 2020. To realize this, a large scale verification test is planned to be carried out using the automated driving system of SIP (strategic innovation
creation program) in 2017.Also in "Regionally-limited driverless automated driving transit
service", remotely controlled automated driving systems are expected. In these systems driverless car is supervised by a manipulator from the outside of the cars. Based on the assumption of using special districts verification tests on public roads are planned to be carried out by 2017.
In addition, driverless automated driving transit services to be introduced in dedicated spaces such as underpopulated areas are planned to be launched by 2020.
From now on, based on this roadmap, initiatives involving united public-private entities, including Cabinet Office SIP, relevant ministries and agencies, companies, universities, and research and development institutions, are to be accelerated.
Leading automobile companies have announced that they will introduce automated driving cars of level 2 (2) to market during 2016 and 2018. In addition, activities, such as participating in driverless taxi services, of not only companies in the automobile industry but also IT companies and venture firms have become recent hot topics.
Japan
References :(1) Public-Private ITS Initiative/Roadmaps 2016 (The Strategic Headquarters for the Promotion of an Advanced Information and Telecommunications Network Society , May 20th, 2016)(2) Preliminary Statement of Policy Concerning Automated Vehicles (U.S. National Highway Traffic Safety Administration (NHTSA) agency, May 30th, 2013)(3) Trend of research and development/international standardization related to basic elemental technologies for the automated driving system (Japan Automobile Research Institute, March 2016)
USA
Europe
Initiative by Google Inc. is so outstanding. As of the end of May 2016, they are proceeding with driving tests on public roads with 58 self-driving cars in four cities in North America. Cumulative driving distance in autonomous driving mode is over two and a half million kilometers.
In addition, measures allowing tests of automated driving cars on public roads have passed in Washington DC, and California, Florida, Michigan, Nevada, and other states (3).
A number of research and development projects for automated-driving cars shown below, funded by research and development/ technological innovation programs of European Commission, are currently in progress.
In addition, many projects related to the automated driving technol-ogy are conducted in Germany, France, Netherland, Sweden, and United Kingdom (3).
In the DRIVE ME project in Sweden, for instance, use of one hundred automated-driving cars with general users on public roads is planned in 2017. It will be carried out within an 80 km segment on a highway in Gothenburg, and cars used in the project are expected to be equivalent to level 3 (2) that allows users' "second task" activities (other than driving operations).Present condition 2017 to 2018
2017 to 2018 202020172016Present condition
Until 2020 Aimed at achieving by 2020
Institutional investigation and review launched
Commercialization
Commercialization
Commercialization
Large scale social experiment
Verification on public roads
Verification on public roads
Verification on public roads
Implementation of services
Implementation of services
Level 2: Following driving + automated lane change, etc
Driving on public roads under verification by companies
Driving on public roads under verification by companies
Driving on public roads under verification by companies
Coordination with operators, start of institutional review
Verification carried out on public roads
Expansion of service area
Expansion of service area
A car with a driver (Non-remotely controlled)
Remotely controlled(Depopulated areas, suburbs, city areas)
Level 2: Semi-autopilot (Automated driving mode in limited section)
Level3: Autopilot(Automated driving mode in limited section)
Highways
page
5
Expected time frame for the commercialization of automated driving systems on highways, etc
Expected time frame for realization of driverless automated driving transit service in limited areas
Source: Public-Private ITS Initiative/Roadmaps 2016 (The Strategic Headquarters for the Promotion of an Advanced Information and Telecommunications Network Society, May 20th, 2016)
The automated driving car project funded by European Commission
Source: ITS World Congress 2015 SW1 Horizon 2020 Call on “Automated Road Transport” 2015.10.6
Source: https://www.google.com/selfdrivingcar
A self-driving car of Google Inc.
The Latest Trend of Automated DrivingJapan, United States, and Europe are competing to develop and materialize vehicles equipped with automated driving systems, which is drawing significant attention. The recent major topics are shown here.
Based on rapid industrial/technological changes in relation to the automated driving technology, Public-Private ITS Initiative/Roadmaps 2016 has been developed with extensive revision from the previous 2015 version. The key feature of the new 2016 version is the descrip-tion about the specific roadmap and agenda in order specifically to realize "Automated driving on highways" and "Regionally-limited driverless automated driving transit service" by 2020.
In "Automated driving on highways", semi-autopilot (automated driving from the entrance to the exit on a highway under the supervi-sion of the driver) is planned to be introduced to market by 2020. To realize this, a large scale verification test is planned to be carried out using the automated driving system of SIP (strategic innovation
creation program) in 2017.Also in "Regionally-limited driverless automated driving transit
service", remotely controlled automated driving systems are expected. In these systems driverless car is supervised by a manipulator from the outside of the cars. Based on the assumption of using special districts verification tests on public roads are planned to be carried out by 2017.
In addition, driverless automated driving transit services to be introduced in dedicated spaces such as underpopulated areas are planned to be launched by 2020.
From now on, based on this roadmap, initiatives involving united public-private entities, including Cabinet Office SIP, relevant ministries and agencies, companies, universities, and research and development institutions, are to be accelerated.
Leading automobile companies have announced that they will introduce automated driving cars of level 2 (2) to market during 2016 and 2018. In addition, activities, such as participating in driverless taxi services, of not only companies in the automobile industry but also IT companies and venture firms have become recent hot topics.
Japan
References :(1) Public-Private ITS Initiative/Roadmaps 2016 (The Strategic Headquarters for the Promotion of an Advanced Information and Telecommunications Network Society , May 20th, 2016)(2) Preliminary Statement of Policy Concerning Automated Vehicles (U.S. National Highway Traffic Safety Administration (NHTSA) agency, May 30th, 2013)(3) Trend of research and development/international standardization related to basic elemental technologies for the automated driving system (Japan Automobile Research Institute, March 2016)
USA
Europe
Initiative by Google Inc. is so outstanding. As of the end of May 2016, they are proceeding with driving tests on public roads with 58 self-driving cars in four cities in North America. Cumulative driving distance in autonomous driving mode is over two and a half million kilometers.
In addition, measures allowing tests of automated driving cars on public roads have passed in Washington DC, and California, Florida, Michigan, Nevada, and other states (3).
A number of research and development projects for automated-driving cars shown below, funded by research and development/ technological innovation programs of European Commission, are currently in progress.
In addition, many projects related to the automated driving technol-ogy are conducted in Germany, France, Netherland, Sweden, and United Kingdom (3).
In the DRIVE ME project in Sweden, for instance, use of one hundred automated-driving cars with general users on public roads is planned in 2017. It will be carried out within an 80 km segment on a highway in Gothenburg, and cars used in the project are expected to be equivalent to level 3 (2) that allows users' "second task" activities (other than driving operations).
Recognizes the hand signal from the bicycle and adjusts the vehicle
speed automatically
page
6

The 3rd automated driving workshop (October 2015)
Automated-driving car test course (Concord, California, April 2016)
・TC204 workshop for automated driving systemsTC 204 is holding automated driving workshops at its plenary meetings to build a common understanding on the complex situations surrounding automated driving technologies and to promote concrete discussions towards international standardization.
The first workshop was held at the October 2014 TC 204 plenary meeting in Vancouver, Canada. The history of automated driving, definitions of terms, as well as development and standard-ization trends, were introduced.
The second workshop, held in Hangzhou, China in April 2015, featured topics including systems expected to be commercialized in the near future, the role of social infrastructures such as roads, and even the role of digital map databases.
At the 3rd workshop held in Potsdam, Germany, in October 2015, the progress of discussions on items for standardization related to automated driving technologies was reported from each working group of TC204. In some of items among those shown in the summary table to the right, specific work of standard-ization has already begun.
The April 2016 TC204 plenary meeting was held in Concord, California. In the city, there is an extensive automated-driving car test course (GoMentum Station) leading automobile companies are using to develop automated-driving cars.
Since a committee member of U.S. TC204 is involved in the test course, a tour of the course was conducted where TC204 members participated. The participants exchanged opinions, such as about standardization of test methods for automated-driving cars. Because, for automated driving technologies, multiple standardiza-tion items with several working groups involved are likely to be includ-ed, this workshop is planned to be continued.
The creation of the Ad-hoc group responsible for the standardization of Intelligent Mobility was approved at the October 2015 Potsdam TC204 meeting. In Europe and the United States, harmonization task force groups are working on harmonization work for relevant ITS standards.
Background: While EU is currently encountering issues in realization of environmental sustainable society despite the fact that they have funded the automobile and ITS industries, they intend to resolve the current issues involved in cities (emission gas causing environmental pollution, increasing road accidents and traffic congestions) by deploying technolo-gies such as self-driving and connected vehicles and fully utilizing the ITS technologies. EU is applying the idea to promote introduction of ITS service applications by centralized top-down approaches. United States, on the other hand, is trying to promote introduction of self-driving and connected vehicles to solve current issues in urban areas, by encourag-ing each city or state to independently introduce those technologies relying on their own plans and ideas (at their discretion) with fundamental guidelines prepared by the federal government.
Current situation in Europe: In October 2012, EU instructed CEN/ETSI to define standards of Urban ITS. In December 2015, the CEN project team PT1701 submitted the intermediate report including 102 proposals
to EU. The reported proposals were also disclosed to ISO at the February CEN conference in Brussels. EU issued CID (Commission implementing decision) M/546 on Urban ITS on February 16th, 2016, and instructed CEN to proceed with standardization on Urban ITS. PT1701 reviewed the 102 proposed items of intermediate report and submitted approx twenty proposed items, then released the final report on May 20th.Refer to the following URL:
http://www.urbanits.eu/#!publicdocuments/cjg9
CEN/TC278 approved the creation of new standardization working group, WG17, for Urban ITS in April 2016.
Situation in the United States: The smart city pilot project was launched in fall of 2015 and seven cities were selected as possible candidate locations and Columbus, Ohio has been awarded as a winner. Federal government will invest approx. forty million dollars in the project with a slogan "Create a fully integrated, first-of-its-kind city that uses data, technology and creativity to shape how people and goods move in the future."
While big data is drawing attention in many industries, the current situation is that each standardization body is considering and defining standardization for data storage and distribution in relation with the big data. For TC204 that is involved in the international standard of ITS, its leadership is demanded in the fields related to traffic matter in terms of the big data, too. Each working group in TC204 is handling relevant data, for instance WG1: Architecture and data concept, WG3: Spatial data including information related to maps, WG4: Classification and identifica-tion of vehicles and freights, WG5: Traffic condition estimated from
automated fee and toll collection, WG7: Traffic management of commer-cial trucks, WG8: Public traffic service, WG9: Traffic control condition, WG10: Travelers, WG14: Vehicle transit condition and prediction, WG16: Network and probe data, WG17: Mobile devices, and WG18: Cooperative ITS.Specifically as a real-time traffic information system and based on the following three processes: data collection, data aggregation/translation, and information dissemination, as shown below, the data is entirely organized by the enterprise architecture from four viewpoints: category, ownership, right, and management.
Initiative of TC204 related to automated driving
Cross-cutting Activities of TC204
Source:Explaining International IT Application Leadership – Intelligent TransportSystems: Stephen Ezell: January 2010.
Introduction of Intelligent Mobility Ad-hoc Group Activity
Big Data Ad-hoc Group Activity
WG Suggestions for key standardization review from each working group (excerpt)
1 Data concept registration, privacy
3 Geographic data file 5.1, reference to lane level position
4 Privacy in electronic identification, multi-modal freight exchange
7 Inter-city self-driving truck lane (platooning)
8 e-Call at ITS stations, charging infrastructure for public bus
9 Infrastructure damage report, variable speed restriction, pavement condition information
14 Automated Parking System, Automated lane change, highway pilot, terms
18 e-Horizon (Electronic horizon: acquisition of information outside of the view via communication)
City road segment (for testing of pedestrian protection, etc)
Automated-driving test course in Concord, an extensive site covering approximately 20 square kilometers
page
7

The 3rd automated driving workshop (October 2015)
Automated-driving car test course (Concord, California, April 2016)
・TC204 workshop for automated driving systemsTC 204 is holding automated driving workshops at its plenary meetings to build a common understanding on the complex situations surrounding automated driving technologies and to promote concrete discussions towards international standardization.
The first workshop was held at the October 2014 TC 204 plenary meeting in Vancouver, Canada. The history of automated driving, definitions of terms, as well as development and standard-ization trends, were introduced.
The second workshop, held in Hangzhou, China in April 2015, featured topics including systems expected to be commercialized in the near future, the role of social infrastructures such as roads, and even the role of digital map databases.
At the 3rd workshop held in Potsdam, Germany, in October 2015, the progress of discussions on items for standardization related to automated driving technologies was reported from each working group of TC204. In some of items among those shown in the summary table to the right, specific work of standard-ization has already begun.
The April 2016 TC204 plenary meeting was held in Concord, California. In the city, there is an extensive automated-driving car test course (GoMentum Station) leading automobile companies are using to develop automated-driving cars.
Since a committee member of U.S. TC204 is involved in the test course, a tour of the course was conducted where TC204 members participated. The participants exchanged opinions, such as about standardization of test methods for automated-driving cars. Because, for automated driving technologies, multiple standardiza-tion items with several working groups involved are likely to be includ-ed, this workshop is planned to be continued.
The creation of the Ad-hoc group responsible for the standardization of Intelligent Mobility was approved at the October 2015 Potsdam TC204 meeting. In Europe and the United States, harmonization task force groups are working on harmonization work for relevant ITS standards.
Background: While EU is currently encountering issues in realization of environmental sustainable society despite the fact that they have funded the automobile and ITS industries, they intend to resolve the current issues involved in cities (emission gas causing environmental pollution, increasing road accidents and traffic congestions) by deploying technolo-gies such as self-driving and connected vehicles and fully utilizing the ITS technologies. EU is applying the idea to promote introduction of ITS service applications by centralized top-down approaches. United States, on the other hand, is trying to promote introduction of self-driving and connected vehicles to solve current issues in urban areas, by encourag-ing each city or state to independently introduce those technologies relying on their own plans and ideas (at their discretion) with fundamental guidelines prepared by the federal government.
Current situation in Europe: In October 2012, EU instructed CEN/ETSI to define standards of Urban ITS. In December 2015, the CEN project team PT1701 submitted the intermediate report including 102 proposals
to EU. The reported proposals were also disclosed to ISO at the February CEN conference in Brussels. EU issued CID (Commission implementing decision) M/546 on Urban ITS on February 16th, 2016, and instructed CEN to proceed with standardization on Urban ITS. PT1701 reviewed the 102 proposed items of intermediate report and submitted approx twenty proposed items, then released the final report on May 20th.Refer to the following URL:
http://www.urbanits.eu/#!publicdocuments/cjg9
CEN/TC278 approved the creation of new standardization working group, WG17, for Urban ITS in April 2016.
Situation in the United States: The smart city pilot project was launched in fall of 2015 and seven cities were selected as possible candidate locations and Columbus, Ohio has been awarded as a winner. Federal government will invest approx. forty million dollars in the project with a slogan "Create a fully integrated, first-of-its-kind city that uses data, technology and creativity to shape how people and goods move in the future."
While big data is drawing attention in many industries, the current situation is that each standardization body is considering and defining standardization for data storage and distribution in relation with the big data. For TC204 that is involved in the international standard of ITS, its leadership is demanded in the fields related to traffic matter in terms of the big data, too. Each working group in TC204 is handling relevant data, for instance WG1: Architecture and data concept, WG3: Spatial data including information related to maps, WG4: Classification and identifica-tion of vehicles and freights, WG5: Traffic condition estimated from
automated fee and toll collection, WG7: Traffic management of commer-cial trucks, WG8: Public traffic service, WG9: Traffic control condition, WG10: Travelers, WG14: Vehicle transit condition and prediction, WG16: Network and probe data, WG17: Mobile devices, and WG18: Cooperative ITS.Specifically as a real-time traffic information system and based on the following three processes: data collection, data aggregation/translation, and information dissemination, as shown below, the data is entirely organized by the enterprise architecture from four viewpoints: category, ownership, right, and management.
Initiative of TC204 related to automated driving
Cross-cutting Activities of TC204
Source:Explaining International IT Application Leadership – Intelligent TransportSystems: Stephen Ezell: January 2010.
Introduction of Intelligent Mobility Ad-hoc Group Activity
Big Data Ad-hoc Group Activity
page
8

ITS is a large-scale collection of systems covering many areas of application, with a large number of people involved in its development over a long period. This makes it crucial to establish an architecture that ensures the expandability of the systems that comprise ITS as well as their interoperability and compatibility.
WG 1 is developing standards for common information and methods in the ITS sector, including shared terminology, the standardization of data representation formats, architectures for sharing service and system concepts, as well as risk assessment methods and the benefits of services.
ITS Reference Model Architecture (ISO 14813)System architecture plays an important role in ensuring that everyone concerned shares a common understanding of the services and systems, and in guaranteeing the expandability of systems as well as their interoperability and compatibility. The ITS reference architecture (14813 series) was established for reference in developing architec-tures and as a model to compare the architectures of different countries.
Continuous maintenance is required to deal with new services and
systems arising from technological advances. With R&D for automated driving-related services gaining momentum in recent years, Japan proposed adding them to Part 1 during the 2014 systematic review. The revised version is scheduled to be issued soon, and WG1 has asked the TC to release it free of charge to encourage its use. Regular revisions will also serve as opportunities to gradually update the remaining parts to reflect the new versions of data description languages and the 14187 series.
List of WG1 Work Items
WG 1 Architecture
While it is extremely important that the various system components in ITS use consistent names for the data they handle for reasons that include ensuring interoperability and improving the efficiency of system development through the sharing of data, the large number of people involved in system development makes this very difficult.
Data dictionaries are designed to promote sharing by managing dictionaries of information about the definitions and formats of data subject to shared use. In the data dictionaries prepared for each functional field, the mechanism used to register and manage the interdisciplinary data used among multiple fields is called a data registry. The development of new systems is made more efficient by studying the use of shared data stored in the data registry.
ISO 14817 covers the items required to describe the registered data (including names, definitions, data types and value ranges), procedures for managing data features and quality, and operational systems. Additionally, the registered information is required to specify the system architecture and data models upon which the information is based to identify its meaning as clearly as possible.
Although WG 1 has conducted data registry trial operations in the past, it has yet to move to actual operations. However, with the recent stepping up of standardization activities, the early introduc-tion of the data registry was deemed necessary, and WG 1 conducted trial operations again in 2013. These results are currently being applied to updating the ISO 14817 series and the object identifiers (OID) specified and managed by ITU-TSG17 and
ISO/IEC JTC1/SC6 have been adopted as the data administration framework.
At the same time, WG 1 is studying the construction of an operating framework based on the ISO 14817 series under revision, and is making preparations such as looking for candidates for the Registration Administration Authority organization that will manage the registry and stewards who will enter data into it.
Requirements for the ITS Central Data Registry and Data Dictionary (ISO 14817)
Although TC 204 uses UML and ASN.1 as standard languages to describe information models and data content subject to standardization, recent system implementations increasingly use XML to send and receive data between subsystems. The use of consortium standards such as web services or machine to machine delivery (M2M) is spreading as the standard procedure to coordinate systems on the Internet.
A high degree of safety and reliability, as well as information security, must be ensured for ITS since they
will see long-term operation as a social system. WG 1 is working on standardizing the rules and guidelines that required leveraging the rapidly advancing technologies in the IT field in the construction of the overall ITS structure.
From Japan, the guideline (TR 24097-2) has already been issued to ensure interoperability and quality of web services that are expected to become widely adopted in the field of ITS in the future. Currently standardization of TR 24097-3 is in progress.
Application of IT-related technologies in ITS
(source) ETSI TR 103 290 Fig. 6
BusinessApplication#1
BusinessApplication#i
BusinessApplication#N
Common Application infrastructure
CommunicationNetwork 1
CommunicationNetwork 2
IPGateway
Local NW
Device Device Device Device
M2M (Common Application Infrastructure)Cureen system (for applications only)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)ISO 14813-1 ITS service domains, service groups and servicesISO/NP 14813-2 Core TICS reference architectureISO/NP 14813-3 Example elaborationISO/NP 14813-4 Reference model tutorialISO 14813-5 Requirements for architecture description in ITS standardsISO/NP 14813-6 Data presentation in ASN.1PWI 14813-7 ITS standard system
Definition of service classes (categories, groups)Description of abstract object-oriented system architectureDescription of a specific example of reference architecture with emphasis on traffic managementExplanation of basic terms and modeling views in defining object-oriented architectureTerms and forms to be used for documentation or reference of architectureRelation of Description of ASN.1 to be used for normal syntax notation with other data description languagesMapping of ITS services and relevant standards
TitlesISO Outline
Dictionary Data dictionary
Terms
• Name (spelling) • Pronunciation • Conjugation • Meaning • Usage
E.g. (Road number)
Link_id_number
Integer (1..999)
Traffic data
Unique numerical identifier for the link
Data
• Name
• Data type
• Classification
• Definition
Standardization themes ISO number Content1 Privacy aspects in ITS standards and systems TR 12859 Guidelines for protecting privacy in the development of ITS standards and systems
2 Reference model architectures for theITS sector
ISO 14813-1ISO/NP 14813-2~4ISO 14813-5ISO/NP 14813-6PWI 14813-7
Specification of fundamental services, core architecture and descriptive requirements for architectures, for reference in the developing new architectures and comparing different ones
3 ITS Central data registry - Part 1: Requirements for an ITS central data definitions NP 14817-1 Defines the requirements for data dictionaries that list the data definitions to be shared
by the parties involved in ITS
4 ITS Central data registry - Part 2: Governance of the central ITS data concept registry ISO 14817-2 Management procedures for data registration
5 ITS Central data registry - Part 3: OID assignments for ITS data concepts DIS 14817-3 Object Identifier adaptation
6 Using UML for defining and documenting ITS /TICS Interfaces TR 17452 Guidelines for UML use in defining and documenting ITS interfaces
7Using web services (machine-machine delivery) for ITS service delivery - Part 1: Realization of interoperable web services
DIS 24097-1 Stipulation of guidelines on the use of web services designed to support collaboration between Internet-based systems
8Using web services (machine-machine delivery) for ITS service delivery - Part 2: Elaboration of interoperable ITS web services
TR 24097-2 Technical guidelines to achieve web service interoperability in the context of ITS
9Using web services(machine-machine delivery)for ITS service delivery - Part 3: Quality of services (QoS)
DIS 24097-3 Quality of services in the context of ITS
10 Procedures for developing ITS deployment plans utilizing ITS system architecture TR 24098 Description of procedures to develop ITS deployment plans utilizing ITS system
architecture11 Use of UML in ITS International Standards and deliverables TR 24529 Stipulation of rules and guidelines on the use of UML for ITS standards, data registries and data dictionaries
12 Using XML in ITS standards,data registries and data dictionaries ISO 24531 Stipulation of rules on the use of XML for ITS standards, data registries and data
dictionaries
13Using CORBA (Common Object Request Broker Architecture) in ITS standards,data registries and data dictionaries
TR 24532 Stipulation of rules on the use of CORBA for ITS standards, data registries and data dictionaries
14 Harmonization of ITS data concepts TR 25100 Provision of guidelines for data concepts related to registration in data registries15 Use case pro forma template TR 25102 Provision of a template to facilitate use case description16 Training requirements for ITS architecture TR 25104 Definition of requirements concerning training courses about ITS architecture
17 Use of process oriented methodology in ITS international standards and other deliverables TR 26999 Stipulation of rules for process (function) oriented methodologies for ITS standards,
data registries and data dictionaries
18 Joint APEC-ISO study of progress todevelop and deploy ITS standards TR 28682 APEC-ISO joint investigation for ITS standards development and/or implementation progress
19 Cooperative ITSPart 1: Terms and definitions TR 17465-1 Definition of Cooperative ITS
20 Cooperative ITSPart 2: Guidelines for standard documents TR 17465-2 Guidelines on the formulation of Cooperative ITS standards documents
21Cooperative ITSPart 3: Release procedures for standards documents
TR 17465-3 Release procedure for the development of standards documents on cooperative ITS
Item(s) that Japan is / has been actively working on
page
9

ITS is a large-scale collection of systems covering many areas of application, with a large number of people involved in its development over a long period. This makes it crucial to establish an architecture that ensures the expandability of the systems that comprise ITS as well as their interoperability and compatibility.
WG 1 is developing standards for common information and methods in the ITS sector, including shared terminology, the standardization of data representation formats, architectures for sharing service and system concepts, as well as risk assessment methods and the benefits of services.
ITS Reference Model Architecture (ISO 14813)System architecture plays an important role in ensuring that everyone concerned shares a common understanding of the services and systems, and in guaranteeing the expandability of systems as well as their interoperability and compatibility. The ITS reference architecture (14813 series) was established for reference in developing architec-tures and as a model to compare the architectures of different countries.
Continuous maintenance is required to deal with new services and
systems arising from technological advances. With R&D for automated driving-related services gaining momentum in recent years, Japan proposed adding them to Part 1 during the 2014 systematic review. The revised version is scheduled to be issued soon, and WG1 has asked the TC to release it free of charge to encourage its use. Regular revisions will also serve as opportunities to gradually update the remaining parts to reflect the new versions of data description languages and the 14187 series.
List of WG1 Work Items
WG 1 Architecture
While it is extremely important that the various system components in ITS use consistent names for the data they handle for reasons that include ensuring interoperability and improving the efficiency of system development through the sharing of data, the large number of people involved in system development makes this very difficult.
Data dictionaries are designed to promote sharing by managing dictionaries of information about the definitions and formats of data subject to shared use. In the data dictionaries prepared for each functional field, the mechanism used to register and manage the interdisciplinary data used among multiple fields is called a data registry. The development of new systems is made more efficient by studying the use of shared data stored in the data registry.
ISO 14817 covers the items required to describe the registered data (including names, definitions, data types and value ranges), procedures for managing data features and quality, and operational systems. Additionally, the registered information is required to specify the system architecture and data models upon which the information is based to identify its meaning as clearly as possible.
Although WG 1 has conducted data registry trial operations in the past, it has yet to move to actual operations. However, with the recent stepping up of standardization activities, the early introduc-tion of the data registry was deemed necessary, and WG 1 conducted trial operations again in 2013. These results are currently being applied to updating the ISO 14817 series and the object identifiers (OID) specified and managed by ITU-TSG17 and
ISO/IEC JTC1/SC6 have been adopted as the data administration framework.
At the same time, WG 1 is studying the construction of an operating framework based on the ISO 14817 series under revision, and is making preparations such as looking for candidates for the Registration Administration Authority organization that will manage the registry and stewards who will enter data into it.
Requirements for the ITS Central Data Registry and Data Dictionary (ISO 14817)
Although TC 204 uses UML and ASN.1 as standard languages to describe information models and data content subject to standardization, recent system implementations increasingly use XML to send and receive data between subsystems. The use of consortium standards such as web services or machine to machine delivery (M2M) is spreading as the standard procedure to coordinate systems on the Internet.
A high degree of safety and reliability, as well as information security, must be ensured for ITS since they
will see long-term operation as a social system. WG 1 is working on standardizing the rules and guidelines that required leveraging the rapidly advancing technologies in the IT field in the construction of the overall ITS structure.
From Japan, the guideline (TR 24097-2) has already been issued to ensure interoperability and quality of web services that are expected to become widely adopted in the field of ITS in the future. Currently standardization of TR 24097-3 is in progress.
Application of IT-related technologies in ITS
(source) ETSI TR 103 290 Fig. 6
BusinessApplication#1
BusinessApplication#i
BusinessApplication#N
Common Application infrastructure
CommunicationNetwork 1
CommunicationNetwork 2
IPGateway
Local NW
Device Device Device Device
M2M (Common Application Infrastructure)Cureen system (for applications only)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)
BusinessApplication
Device
GatewayLocal NW
CommunicationNetwork(mobile, fixed,
Powerline ..)ISO 14813-1 ITS service domains, service groups and servicesISO/NP 14813-2 Core TICS reference architectureISO/NP 14813-3 Example elaborationISO/NP 14813-4 Reference model tutorialISO 14813-5 Requirements for architecture description in ITS standardsISO/NP 14813-6 Data presentation in ASN.1PWI 14813-7 ITS standard system
Definition of service classes (categories, groups)Description of abstract object-oriented system architectureDescription of a specific example of reference architecture with emphasis on traffic managementExplanation of basic terms and modeling views in defining object-oriented architectureTerms and forms to be used for documentation or reference of architectureRelation of Description of ASN.1 to be used for normal syntax notation with other data description languagesMapping of ITS services and relevant standards
TitlesISO Outline
Dictionary Data dictionary
Terms
• Name (spelling) • Pronunciation • Conjugation • Meaning • Usage
E.g. (Road number)
Link_id_number
Integer (1..999)
Traffic data
Unique numerical identifier for the link
Data
• Name
• Data type
• Classification
• Definition
page
10

Note 1: Standards in black are published, and standards in red are under development.Note 2: The four digit number after the ISO number and item name is the year of publication.
Relationship Diagram for WG3 Work Items
Service Center Vehicle ITS Station
Server application Navi applicationC-ITS application
ServiceCenter
DB
NavigationSystem DB/
LDM
TS 20452: PhysicalStorage Format (2007)
Map Center
MapCenter
DB
ISO 14825: Geographic Data Files (2004) (2011)PWI 20524: Geographic Data Files 5.1 (2018)
ISO 17267:API (2009)
ISO 14296:C-ITS (2016)
TS 17931:LDM (2013)
ISO 17572: Location Referencing (2008) (2015)PWI 17572-4: Location Referencing ‒ Part 4: Lane-level LR (2018)
NP/CD 17572-2: Location Referencing ‒ Part 2: Pre-coded LR (2016)NP 19297-1: Shareable Geospatial DBs ‒ Part 1: Framework (2017)
・Data collection・Data editing
ISO 24099: NavigationData Delivery (2011)
PWI 21718: Spatio-temporal Data Dictionary (2017)
Currently WG3 comprises of five SWGs and one TFT (task force team). Scope and convenor for each group and team are shown in the table below:
WG 3 ITS Database Technology
List of WG 3 Work Items
ScopeSWG SWG Convener
SWG3.1
SWG3.2
SWG3.3
SWG3.4
SWG3.5
Japan (Originally Netherland)
Japan
Japan (Originally Germany)
USA
Korea
Geographic Data Files
Physical Storage Format
Location Referencing
Application Programming Interface
TFT JapanSpatio-temporal data dictionary (DD)
Sharable Geospatial Databases
Most applications in ITS involve services relating to the movement of human, goods or vehicles. As they require information on starting point/destination and routes in addition to data such as time or cost, those services use geographic data. With the rapid growth of in-car navigation systems and the imminent deployment of cooperative ITS, makes the role of geographic data critical. In addition, information of high-precision road environment 3D images and dynamic spatio-temporal information which overtakes the conventional concepts of geographic data are consid-
ered to take an important role in the rapidly evolving automated driving technology.
WG 3 has been involved in standardizing exchange formats between geographic data providers, as well as compact storage formats allowing high-speed searching, and has also worked on developing functional requirement specifications, data models and data elements for geographic data. WG 3 has limited its scope to static geographic data, but seeks to take part in the standardiza-tion of dynamic data.
Geographic Data Files - GDF 5.0 (ISO 14825)This is the standard for the exchange of data between geographic databases providing the basic map data used for navigation.
As the files are not used directly for navigation, emphasis is placed on ease of editing – genre-based data compilation – rather than on compactness and speed relative to physical storage. In other words, the emphasis is on production. For XGDF, methods of providing information will also be taken into consideration.
Work on the GDF format was implemented based on European CEN-GDF studies supplemented with concepts from the Japan digital road map database and other standards. Thanks to the existing standardization efforts by CEN, work proceeded relatively smoothly compared with other items, and GDF was issued as ISO 14825 in February 2004.
The overall volume of GDF is huge. Although the work went more smoothly than for other items, new ideas were proposed as discussions progressed, and completing drafts required a lot of time. Upon completion of the WG drafts, a proposal to begin studying the next standard was immedi-ately launched, and a new PWI was approved at the TC 204
conference in November 2000. The purpose was to revise the current GDF and address the latest developments in information exchange, such as the use of the Internet. The work entered the NP phase in August 2004 after requests for improvement were compiled.
Discussions on a new GDF got started with required performances and models. Japan proposed a structure that performs time management based on KIWI+*, a new standard by the Japan Digital Road Map Association. KIWI+ evolved from KIWI, which was widely used in Japan and served as a basis for the proposed physical storage. The final draft emphasizing a time-managed structure was proposed by Japan and gained approval from the US and Europe. Through close collaboration with TC 211, which handles geographical information on a comprehensive basis, the TC 211 UML was adopted for the concept model and the draft was reviewed. The resulting ISO was published in July 2011.
In 2014, the process of studying revisions to meet new demands for cooperative ITS began.
In addition, the systematic review has been initiated in January 2016.
※KIWI+: simple topology & spatio-temporal - open database schemaSpatio-temporal database Description MethodThis is the familiar name of the public implementation-level database
structure which handles time and space information uniformly through implicit phased descriptions. It uses a data structure that combines the KIWI format proposed by ISO/TC 204/SWG 3.2 for use in car navigation and other applications with the DiMSIS (time-space information system).
Standardization themes ISO number Contents
1 Geographic Data Files - GDF5.0 ISO 14825 Standard for data exchange of geographical databases serving as the basis for geographical data used for navigation
2Requirements and Logical Data Model for PSF and API and Logical Data Organization for PSF used in ITS Database Technology
TS 20452 Standardization of physical storage format for hard discs and etc. used for navigation
3 Navigation Data Delivery Structures and Protocols ISO 24099 Standardization of data structures and protocols to transmit map data
4 Location Referencing forGeographic Database ISO 17572-1〜3 Standardization of location referencing when exchanging data between different applications
or geographic databases
5 Navigation systems - Application programming interface (API) ISO 17267 Standardization of data access methods for application programs such as navigation
systems
6 Extension of map database specifications for applications of cooperative ITS ISO 14296 Building functional requirements and data models concerning the application of map
databases in cooperative systems (including ADAS) within ITS
7 Extension of map database specifications for Local Dynamic Map for applications of Cooperative ITS TS 17931 Local Dynamic Map functional requirements and data models for cooperative ITS
8 Shareable geospatial databases for ITS applications NP-19297-1 Presenting the new framework which enables access to various geographic databases and
data sharing between them
9 Geographic Data Files – GDF 5.1 PWI 20524 Standard for data exchange in geospatial databases for applications such as cooperative ITS, multi-modal navigation, and automated driving systems
10 Lane-level Location Referencing for Geographic Databases PWI 17572-4 Addition of the forth profile that permits location referencing of “Which lane?” and “Where in
lane” for the cooperation/automated driving system
11 Spatio-temporal Data Dictionary PWI 21718 Data dictionary of static/dynamic data about spatio-temporal object for ITS and the cooperative/automated driving system
Item(s) that Japan is / has been actively working on
page
11

Note 1: Standards in black are published, and standards in red are under development.Note 2: The four digit number after the ISO number and item name is the year of publication.
Relationship Diagram for WG3 Work Items
Service Center Vehicle ITS Station
Server application Navi applicationC-ITS application
ServiceCenter
DB
NavigationSystem DB/
LDM
TS 20452: PhysicalStorage Format (2007)
Map Center
MapCenter
DB
ISO 14825: Geographic Data Files (2004) (2011)PWI 20524: Geographic Data Files 5.1 (2018)
ISO 17267:API (2009)
ISO 14296:C-ITS (2016)
TS 17931:LDM (2013)
ISO 17572: Location Referencing (2008) (2015)PWI 17572-4: Location Referencing ‒ Part 4: Lane-level LR (2018)
NP/CD 17572-2: Location Referencing ‒ Part 2: Pre-coded LR (2016)NP 19297-1: Shareable Geospatial DBs ‒ Part 1: Framework (2017)
・Data collection・Data editing
ISO 24099: NavigationData Delivery (2011)
PWI 21718: Spatio-temporal Data Dictionary (2017)
Currently WG3 comprises of five SWGs and one TFT (task force team). Scope and convenor for each group and team are shown in the table below:
WG 3 ITS Database Technology
List of WG 3 Work Items
ScopeSWG SWG Convener
SWG3.1
SWG3.2
SWG3.3
SWG3.4
SWG3.5
Japan (Originally Netherland)
Japan
Japan (Originally Germany)
USA
Korea
Geographic Data Files
Physical Storage Format
Location Referencing
Application Programming Interface
TFT JapanSpatio-temporal data dictionary (DD)
Sharable Geospatial Databases
Most applications in ITS involve services relating to the movement of human, goods or vehicles. As they require information on starting point/destination and routes in addition to data such as time or cost, those services use geographic data. With the rapid growth of in-car navigation systems and the imminent deployment of cooperative ITS, makes the role of geographic data critical. In addition, information of high-precision road environment 3D images and dynamic spatio-temporal information which overtakes the conventional concepts of geographic data are consid-
ered to take an important role in the rapidly evolving automated driving technology.
WG 3 has been involved in standardizing exchange formats between geographic data providers, as well as compact storage formats allowing high-speed searching, and has also worked on developing functional requirement specifications, data models and data elements for geographic data. WG 3 has limited its scope to static geographic data, but seeks to take part in the standardiza-tion of dynamic data.
Geographic Data Files - GDF 5.0 (ISO 14825)This is the standard for the exchange of data between geographic databases providing the basic map data used for navigation.
As the files are not used directly for navigation, emphasis is placed on ease of editing – genre-based data compilation – rather than on compactness and speed relative to physical storage. In other words, the emphasis is on production. For XGDF, methods of providing information will also be taken into consideration.
Work on the GDF format was implemented based on European CEN-GDF studies supplemented with concepts from the Japan digital road map database and other standards. Thanks to the existing standardization efforts by CEN, work proceeded relatively smoothly compared with other items, and GDF was issued as ISO 14825 in February 2004.
The overall volume of GDF is huge. Although the work went more smoothly than for other items, new ideas were proposed as discussions progressed, and completing drafts required a lot of time. Upon completion of the WG drafts, a proposal to begin studying the next standard was immedi-ately launched, and a new PWI was approved at the TC 204
conference in November 2000. The purpose was to revise the current GDF and address the latest developments in information exchange, such as the use of the Internet. The work entered the NP phase in August 2004 after requests for improvement were compiled.
Discussions on a new GDF got started with required performances and models. Japan proposed a structure that performs time management based on KIWI+*, a new standard by the Japan Digital Road Map Association. KIWI+ evolved from KIWI, which was widely used in Japan and served as a basis for the proposed physical storage. The final draft emphasizing a time-managed structure was proposed by Japan and gained approval from the US and Europe. Through close collaboration with TC 211, which handles geographical information on a comprehensive basis, the TC 211 UML was adopted for the concept model and the draft was reviewed. The resulting ISO was published in July 2011.
In 2014, the process of studying revisions to meet new demands for cooperative ITS began.
In addition, the systematic review has been initiated in January 2016.
※KIWI+: simple topology & spatio-temporal - open database schemaSpatio-temporal database Description MethodThis is the familiar name of the public implementation-level database
structure which handles time and space information uniformly through implicit phased descriptions. It uses a data structure that combines the KIWI format proposed by ISO/TC 204/SWG 3.2 for use in car navigation and other applications with the DiMSIS (time-space information system).
page
12

GDF 5.1 Functional Block Diagram
Modified common data model and media record specification
Car Navigation Extension
Application independent contents organized for ITS
Contents for Part-2 areas
C-ITS Extension
Multi-modal ExtensionPublic Transport Extension
Other Transport Extension
Future ITS extension
PWI 20524(GDF 5.1)
Map data providers ITS application system providers
Automated Driving Extension
Contents for Part-1 areas
Part-1
Part-2
Car Navigation Extension
Public Transport ExtensionModifiedGDF 5.0
Service centers (heterogeneous database group)
Buildings Private corp. Local gov. MNO CP Map provider
Wired network
Wireless/wired network
Smartphones CNS Mobile devices
End users(heterogeneousapplication group)
Part2Wrapper:geospatial databaseinterface server =access, query,coordinatetransformation,format conversion, …
Part3Information mediator:
query dispatch, databasecatalog & metadata,database interoperation
Part1: Framework
Part4
Wrapper Wrapper Wrapper Wrapper Wrapper
Information mediator
Common data structure
Data converter Data converter Data converter
In terms of applications, GDF 5.0 primarily deals with geographic databases for navigation systems, but there is a growing need to update it in response to the emergence of new applications for cooperative ITS, multi-modal navigation, and automated driving systems. In October 2014, PWI 20524 was approved and the process of revising GDF 5.0 is underway. WG 3 is aiming to have the ISO issued in October 2018.
Led by Japan, work toward applying the ISO 14296 specifications to cooperative ITS is moving forward, with specifications that allow regionally-limited high-precision expressions relative to the GDF 5.0 uniform precision for all areas are being prepared. For multi-modal navigation, France is taking the lead in preparing specifications to achieve compatibility between the EN 12986 Reference Data Model for Public Transport (Transmodel) and GDF 5.0. There are still no internationally recognized use cases for automated driving. Amidst expectations of future Japanese, European and U.S. input, Japan will be taking the lead in this area.
This covers methods for location referencing when information is exchanged between different applications and geographic databases. It is designed to find locations in different map databases when traffic information is exchanged between systems. Initially, it was decided that a method based on coordinate systems and road descriptors would be adopted as options, pending the results of demonstration experiments in Europe and the United States. However, activities in this field were stalled for some time because the results were not readily available. During the stalemate, the need for standardization of general-purpose LR grew sharply as the information community moved rapidly toward standardization. Therefore, WG 3 decided to stop insisting only on coordinate systems and road descriptors, and to aim at establishing a more comprehensive standard. Discussions on two methods, pre-coded profile (pre-coded location references: a referencing method assuming common pre-coded location tables like VICS or TMC) and dynamic profile (dynamic location references: a method which varies in real-time), were launched in 2000. The draft was completed in November 2006, with the CD and FDIS ballots
completed in July 2007 and November 2008, respectively, and it was issued as an ISO standard in December 2008.
In addition, Dynamic Profile evolved from the European proposal (AGORA-C) and incorporated Japan’s proposal on using coordinates. The systematic reviews carried out since 2011 provided the opportu-nity to add Japan’s Section ID Method as a new sample location reference method, and an updated version was issued as ISO 17572 in January 2015.
The opening of voting for the DIS ballot that revises ISO 17572 Part 2 to include pre-coded profiles in the WG10 NP 21219-20 (see the list of WG 10 work items), was approved in January 2016 and is scheduled to begin in the near future.
In April 2016, addition of the 4th profile "Lane level location refer-encing method" has been accepted that permits location referencing of "Which lane?" and "Where in lane" for the cooperative/automated driving system. The work has already been started as PWI 17572-4. Note that the outcome of the work to be published as an IS or TS is still under consideration as of June 2016.
Location Referencing (LR, ISO 17572)
Discussions on drafts for Physical Storage Format (NP 14826), API Standard (NP 17267) and Updating (NP 17517) were delayed, and work on these items had to be finished in compliance with the new ISO rules. A NP ballot to register NP 14826 agreements on standardization as official documents was proposed and approved,
and published as TS 20452 in June 2007. A new PWI was approved in October 2003 for NP 17267. The NP/CD ballot ended in October 2007 and established as an ISO in November 2009.
ISO 17267 has been confirmed after the systematic review that took place in November 2015.
Physical Storage Format (TS 20452) and API Standards (ISO 17267)
For in-vehicle digital map databases, Japan proposed a new PWI, “Extension of current specifications for in-vehicle digital map databases” in response to new requirements such as ADAS and multi-modal navigation. This was approved in May 2009. After that, the scope was expanded to cover static information in Local Dynamic Maps in cooperative systems, and this working item was approved as an NP in April 2011. As the standard development schedule was brought forward, NP/TS 17931 was established as a new document comprising the Local Dynamic Map part of NP 14296. The opening of CD/DTS voting for this item was approved in April 2012.
WG 3 concluded one phase of the standardization activities for static information in Local Dynamic Maps at the end of 2012, and which was issued as TS 17931 prior to NP 14296, as explained in the next paragraph.
Further, starting in 2012, ADAS and multi-modal navigation will be studied, and the expansion of specifications for functional require-ments, data models and data elements are underway. This work item was approved by DIS ballot.
The resulting ISO was published in February 2016.In addition, standardization activities for static information in
Local Dynamic Maps have been moving forward in cooperation with European and American standardization bodies such as CEN, ETSI and SAE while respecting the relationships below.
Extension of Map Database Specifications for Applications of Cooperative ITS (ISO 14296)
This work item was developed prior to FDIS 14296 by extracting its section on Local Dynamic Maps as a result of WG 3 cooperation in observing the period specified by standardization mandate M/453 issued by the EC. It was
issued as TS in June 2013.Even though the systematic review was held in January
2016, currently this standard is likely to be withdraw-en with publication of ISO 14296 in February 2016.
Extension of Map Database Specifications for Local Dynamic Map for Applications of Cooperative ITS (TS 17931)
Spatio-temporal data dictionary (PWI 21718)
Geographic Data Files – GDF 5.1 (PWI 20524)
Navigation Data Delivery and Structures and Protocols (ISO 24099)
Developments in communications and database technolo-gies are allowing the introduction of new services such as indoor and multi-modal navigation for mobile devices such as smartphones. New future services will require more extensive and detailed geospatial databases than the current car navigation map databases. This work item aims at standardizing the framework for new database services allowing the use and sharing of various geospatial databases.
The scope of this work item comprises 4 parts, and voting on the NP ballot for Part 1, which covers the frame-work, began and was approved in April 2015. As of June 2016, it is in the final stage of WD creation.
Data dictionary of static data (map elements, etc) and dy-namic data (traffic jam, vehicle speed, etc) about Spatio-temporal objects for ITS and cooperative/automated driving system. The key objective is to rectify disorder of terminology in the automated driving systems by compiling data names/types/definitions/structures, by aiming publica-
Sharable Geospatial Databases for ITS Applications (NP 19297-1)
ADAS : Advanced Driver Assistance SystemsGDF : Geographic Data FilesLR : Location Referencing
PSF : Physical Storage FormatXGDF : eXtended Geographic Data FilesUML : Unified Modeling Language
WG 3 ITS Database Technology
Shareable geospatial DB diagramIn Japan, there is rising demand for higher resolution map data in the navigation system and ADAS fields. Addressing this demand requires studying systems that enable only the necessary map data (necessary portions) to be transmitted when needed (real-time). A map data transmission structure
and protocol was initiated and proposed by Japan, and the NP was approved at the TC conference in April 2006. It was issued as an ISO in January 2011.
Note that the systematic review was held in January 2016.
tion as an TR in 2016, and ISO in 2018. We recognize that it is most important to reach global agreement through co-operation with not only, needless to say, other WGs in TC204 but also standardization bodies in Europe and the United States, including CEN, ETSI, and SAE. Note that this work item was approved in April 2016.
NP 14296 Static Data Elements
ETSI TC ITS STF448 (LDM
for V-ITS Station)
CEN (Global Concept for
LDMs)
SAE: MAP message set
New Requirements New Requirements
New Requirements
Relationship Diagram for Local Dynamic Map Standardization Activities
page
13

GDF 5.1 Functional Block Diagram
Modified common data model and media record specification
Car Navigation Extension
Application independent contents organized for ITS
Contents for Part-2 areas
C-ITS Extension
Multi-modal ExtensionPublic Transport Extension
Other Transport Extension
Future ITS extension
PWI 20524(GDF 5.1)
Map data providers ITS application system providers
Automated Driving Extension
Contents for Part-1 areas
Part-1
Part-2
Car Navigation Extension
Public Transport ExtensionModifiedGDF 5.0
Service centers (heterogeneous database group)
Buildings Private corp. Local gov. MNO CP Map provider
Wired network
Wireless/wired network
Smartphones CNS Mobile devices
End users(heterogeneousapplication group)
Part2Wrapper:geospatial databaseinterface server =access, query,coordinatetransformation,format conversion, …
Part3Information mediator:
query dispatch, databasecatalog & metadata,database interoperation
Part1: Framework
Part4
Wrapper Wrapper Wrapper Wrapper Wrapper
Information mediator
Common data structure
Data converter Data converter Data converter
In terms of applications, GDF 5.0 primarily deals with geographic databases for navigation systems, but there is a growing need to update it in response to the emergence of new applications for cooperative ITS, multi-modal navigation, and automated driving systems. In October 2014, PWI 20524 was approved and the process of revising GDF 5.0 is underway. WG 3 is aiming to have the ISO issued in October 2018.
Led by Japan, work toward applying the ISO 14296 specifications to cooperative ITS is moving forward, with specifications that allow regionally-limited high-precision expressions relative to the GDF 5.0 uniform precision for all areas are being prepared. For multi-modal navigation, France is taking the lead in preparing specifications to achieve compatibility between the EN 12986 Reference Data Model for Public Transport (Transmodel) and GDF 5.0. There are still no internationally recognized use cases for automated driving. Amidst expectations of future Japanese, European and U.S. input, Japan will be taking the lead in this area.
This covers methods for location referencing when information is exchanged between different applications and geographic databases. It is designed to find locations in different map databases when traffic information is exchanged between systems. Initially, it was decided that a method based on coordinate systems and road descriptors would be adopted as options, pending the results of demonstration experiments in Europe and the United States. However, activities in this field were stalled for some time because the results were not readily available. During the stalemate, the need for standardization of general-purpose LR grew sharply as the information community moved rapidly toward standardization. Therefore, WG 3 decided to stop insisting only on coordinate systems and road descriptors, and to aim at establishing a more comprehensive standard. Discussions on two methods, pre-coded profile (pre-coded location references: a referencing method assuming common pre-coded location tables like VICS or TMC) and dynamic profile (dynamic location references: a method which varies in real-time), were launched in 2000. The draft was completed in November 2006, with the CD and FDIS ballots
completed in July 2007 and November 2008, respectively, and it was issued as an ISO standard in December 2008.
In addition, Dynamic Profile evolved from the European proposal (AGORA-C) and incorporated Japan’s proposal on using coordinates. The systematic reviews carried out since 2011 provided the opportu-nity to add Japan’s Section ID Method as a new sample location reference method, and an updated version was issued as ISO 17572 in January 2015.
The opening of voting for the DIS ballot that revises ISO 17572 Part 2 to include pre-coded profiles in the WG10 NP 21219-20 (see the list of WG 10 work items), was approved in January 2016 and is scheduled to begin in the near future.
In April 2016, addition of the 4th profile "Lane level location refer-encing method" has been accepted that permits location referencing of "Which lane?" and "Where in lane" for the cooperative/automated driving system. The work has already been started as PWI 17572-4. Note that the outcome of the work to be published as an IS or TS is still under consideration as of June 2016.
Location Referencing (LR, ISO 17572)
Discussions on drafts for Physical Storage Format (NP 14826), API Standard (NP 17267) and Updating (NP 17517) were delayed, and work on these items had to be finished in compliance with the new ISO rules. A NP ballot to register NP 14826 agreements on standardization as official documents was proposed and approved,
and published as TS 20452 in June 2007. A new PWI was approved in October 2003 for NP 17267. The NP/CD ballot ended in October 2007 and established as an ISO in November 2009.
ISO 17267 has been confirmed after the systematic review that took place in November 2015.
Physical Storage Format (TS 20452) and API Standards (ISO 17267)
For in-vehicle digital map databases, Japan proposed a new PWI, “Extension of current specifications for in-vehicle digital map databases” in response to new requirements such as ADAS and multi-modal navigation. This was approved in May 2009. After that, the scope was expanded to cover static information in Local Dynamic Maps in cooperative systems, and this working item was approved as an NP in April 2011. As the standard development schedule was brought forward, NP/TS 17931 was established as a new document comprising the Local Dynamic Map part of NP 14296. The opening of CD/DTS voting for this item was approved in April 2012.
WG 3 concluded one phase of the standardization activities for static information in Local Dynamic Maps at the end of 2012, and which was issued as TS 17931 prior to NP 14296, as explained in the next paragraph.
Further, starting in 2012, ADAS and multi-modal navigation will be studied, and the expansion of specifications for functional require-ments, data models and data elements are underway. This work item was approved by DIS ballot.
The resulting ISO was published in February 2016.In addition, standardization activities for static information in
Local Dynamic Maps have been moving forward in cooperation with European and American standardization bodies such as CEN, ETSI and SAE while respecting the relationships below.
Extension of Map Database Specifications for Applications of Cooperative ITS (ISO 14296)
This work item was developed prior to FDIS 14296 by extracting its section on Local Dynamic Maps as a result of WG 3 cooperation in observing the period specified by standardization mandate M/453 issued by the EC. It was
issued as TS in June 2013.Even though the systematic review was held in January
2016, currently this standard is likely to be withdraw-en with publication of ISO 14296 in February 2016.
Extension of Map Database Specifications for Local Dynamic Map for Applications of Cooperative ITS (TS 17931)
Spatio-temporal data dictionary (PWI 21718)
Geographic Data Files – GDF 5.1 (PWI 20524)
Navigation Data Delivery and Structures and Protocols (ISO 24099)
Developments in communications and database technolo-gies are allowing the introduction of new services such as indoor and multi-modal navigation for mobile devices such as smartphones. New future services will require more extensive and detailed geospatial databases than the current car navigation map databases. This work item aims at standardizing the framework for new database services allowing the use and sharing of various geospatial databases.
The scope of this work item comprises 4 parts, and voting on the NP ballot for Part 1, which covers the frame-work, began and was approved in April 2015. As of June 2016, it is in the final stage of WD creation.
Data dictionary of static data (map elements, etc) and dy-namic data (traffic jam, vehicle speed, etc) about Spatio-temporal objects for ITS and cooperative/automated driving system. The key objective is to rectify disorder of terminology in the automated driving systems by compiling data names/types/definitions/structures, by aiming publica-
Sharable Geospatial Databases for ITS Applications (NP 19297-1)
ADAS : Advanced Driver Assistance SystemsGDF : Geographic Data FilesLR : Location Referencing
PSF : Physical Storage FormatXGDF : eXtended Geographic Data FilesUML : Unified Modeling Language
WG 3 ITS Database Technology
Shareable geospatial DB diagramIn Japan, there is rising demand for higher resolution map data in the navigation system and ADAS fields. Addressing this demand requires studying systems that enable only the necessary map data (necessary portions) to be transmitted when needed (real-time). A map data transmission structure
and protocol was initiated and proposed by Japan, and the NP was approved at the TC conference in April 2006. It was issued as an ISO in January 2011.
Note that the systematic review was held in January 2016.
tion as an TR in 2016, and ISO in 2018. We recognize that it is most important to reach global agreement through co-operation with not only, needless to say, other WGs in TC204 but also standardization bodies in Europe and the United States, including CEN, ETSI, and SAE. Note that this work item was approved in April 2016.
NP 14296 Static Data Elements
ETSI TC ITS STF448 (LDM
for V-ITS Station)
CEN (Global Concept for
LDMs)
SAE: MAP message set
New Requirements New Requirements
New Requirements
Relationship Diagram for Local Dynamic Map Standardization Activities
page
14

WG 4 is in charge of the standardization of items necessary for interoperability between systems for the AVI/AEI, automatic vehicle and equipment identification system, through electronic on-board equipment or simple media tags.
First, it discussed standardization issues concerning land transportation, such as trucks, and later added an intermo-dal AVI/AEI system concerning aviation and ship transporta-tion. In the wake of a proposal from CEN, deliberations began on Electronic Registration Identification (ERI) standards as an AVI/AEI applied system designed for environment protection, and ISO designated this as an official discussion item.
ISOs 14814, 14815, and 14816, which deal with AVI/AEI systems were all published as ISOs by March 2006.
ISOs 17261, 17262 and 17263, which deal with intermo-dal AVI/AEI systems were issued as ISO publications by September 2012 through collaborative work with WG7.3
(Data transfer of freight conveyance information). ISO 17264 was issued as an ISO publication in November 2009.
ERI standardization is divided into two parts: fully ERI (parts 1 to 5) ISO 24534 and simplified ERI (U.S. proposal) ISO 24535. Parts 1 to 4 of ISO 24534 were issued in July 2010 and Part 5, which uses the Japanese proposal of Symmetric Key Method was issued in December 2011 as ISO publications. ISO 24535 was published in September 2007 as an ISO publication.
In October 2014, Japan and three other countries formed the ASN.1 Task Team to work on ensuring compatibility between, and correct errors in, existing ISO documents using ASN.1 notation. The task team is dealing with correc-tion of ISOs 14816, 17262, 17264, 24534-3, 24534-4, and 24534-5. Now they have reached the stage where those corrected documents are subject to CD voting.
Intermodal AVI/ AEI Systems
TC 204/WG 4 engages in liaison activities with JTC 1/SC 31/WG 4 (Standardization for automatic identification and data acquisition technology/RFID)
SC 31/WG4 is discussing the compatibility and stan-dards for item RF tags and roadside modules for RF tags. In this discussion, the TC 204 field is positioned as one of ap-plications using roadside modules. Within the TC 204 field, topics relevant to applying to the AVI/AEI system will be
discussed and compiled by TC204/WG4.In addition, TC204/WG4 has established liaison with
TC204/WG7 to proceed with collaborative discussions about standards TC204/WG7 is handling, such as (1) Inter-national Intermodal Transportation, (2) Framework of the Online Operation Management of Commercial Vehicles (ISO 15638 series), and (3) SCM Visualization of Vehicle Logistics (ISO 18495).
Liaison Activities of TC 204/WG 4
ERI determines the system frame to identify a vehicle electronically through roadside units and on-board equipment communications.
The scope of ERI systems is to give a unique identification number to each vehicle and ensure minimum compatibility between on-board equip-ment and roadside units when these exchange information. Also while the data exchange is in progress the performance of on-board equip-ment is allowed to be selected through ERI application systems.
ERTICO was requested from the EC (European Commission) to carry out "an investigation about ERI system operation" in February 2003 (the European EVI project). This activity resulted in compilation of the following nine reports as application areas of the ERI system.(1) prevention of vehicle theft, (2) access control,(3) road pricing, (4) vehicle registration, (5) vehicle tax management,(6) traffic flow control, (7) traffic rules and observance, (8) environ-
ment protection from manufacturing to disposal of vehicles, and(9) hazardous material transportation management
In Japan, due to anticipation of a broad range of ERI applications and the large number of related organizations, the ERI Business Team (a deliberative organization) administered by the Japan Auto-mobile Research Institute (JARI) was established by related organiza-tions and people in August 2003. Until 2005, the ERI Business Team worked to have ERI-related specifications expected to be necessary for operation in Japan reflected in ISO standards.
The CEN-proposed standard was approved as an ISO formal work item at the ISO/TC204 plenary meeting in June 2003. After follow-up discussions, it was issued as ISO publications for the ERI system in two forms: Fully ERI containing data encryption and Basic ERI that utilizes simplified RF tags.
Electronic Registration Identification (ERI)
WG 4 Automatic Vehicle and Equipment Identification
Standardization themes ISO number Contents
List of WG 4 work items
1 ISO 14814 Standardization of architecture of AVI/AEI system
2 Automatic Vehicle And Equipment Identification - System Specifications ISO 14815 Standardization of classification of AVI/AEI system requirements
3 Automatic Vehicle And Equipment Identification - Numbering And Data Structures ISO 14816 Standardization of data compatibility of AVI/AEI system
4 Intermodal Goods Transport - Architecture And Terminology ISO 17261 Standardization of architecture of intermodal AEI system
5 Intermodal Goods Transport - Numbering And Data Structures ISO 17262 Standardization of data structure of intermodal AEI system
6 Intermodal Goods Transport - System Parameters ISO 17263 Standardization of classification of intermodal AEI system
7 Intermodal Goods Transport - Interfaces ISO 17264 Standardization of interface specifications of intermodal AEI system
8 Electronic Registration Identification (ERI) For Vehicles Part 1~4 ISO 24534
9 Electronic Registration Identification (ERI) For Vehicles Part 5 ISO 24534-5 Standardization of security using symmetric key method in the above ERI system
10 Basic Electronic Registration Identification (Basic ERI) ISO 24535 Standardization of specifications for more simpler ERI system
Scope of WG 4
Automatic Vehicle And Equipment Identification - Reference Architectures And Terminology
Standardization of specifications for a system where roadside equipment reads vehicle data electronically registered in on-board equipment
Intermodal AVI/AEI are systems for logistics that use differ-ent transport modes, such as land transportation, airplane, or ship, and the standard specifies the handling of freight transport information of vehicles, transport devices and loaded trucks, etc. between on-board equipment and road-side units.
As shown in the figure below, the concept behind intermo-dal logistics systems involves the anticipated access of vehi-cles, transport devices and loaded trucks from various
access points. To comply with these needs, the standards for intermodal
systems are summarized in the following four standards: (1) ISO 17261; Reference architecture, (2) ISO 17262; System data and addition of its description structure (CSI: Coding Structure Identifier), (3) ISO 17263; Classification of system according to requirements, and (4) ISO 17264; Interface specifications.
Vehicle
Transportoperator
Returnablesvehicles
Vehicle
Equip
Load
Doc.
End user
Goodsprovider
Org.
Documentinformationmanager
Informationmanagers
Vehicle/Equi/Loadtransportinformationmanager
ReturnablesInformationManager
EDI
EDI
Tractor vehicle
Pallet
functionTransportunit
Information TransferTransport Movement
TransportUnitOBE
OBE
ReaderCALM-ITS
function
function
Returnables
Non returnables
Container
Trailer
Train
Aircraft
Vessel
Withcrew
Equipment
Simplified Model
Item(s) that Japan is / has been actively working on
page
15
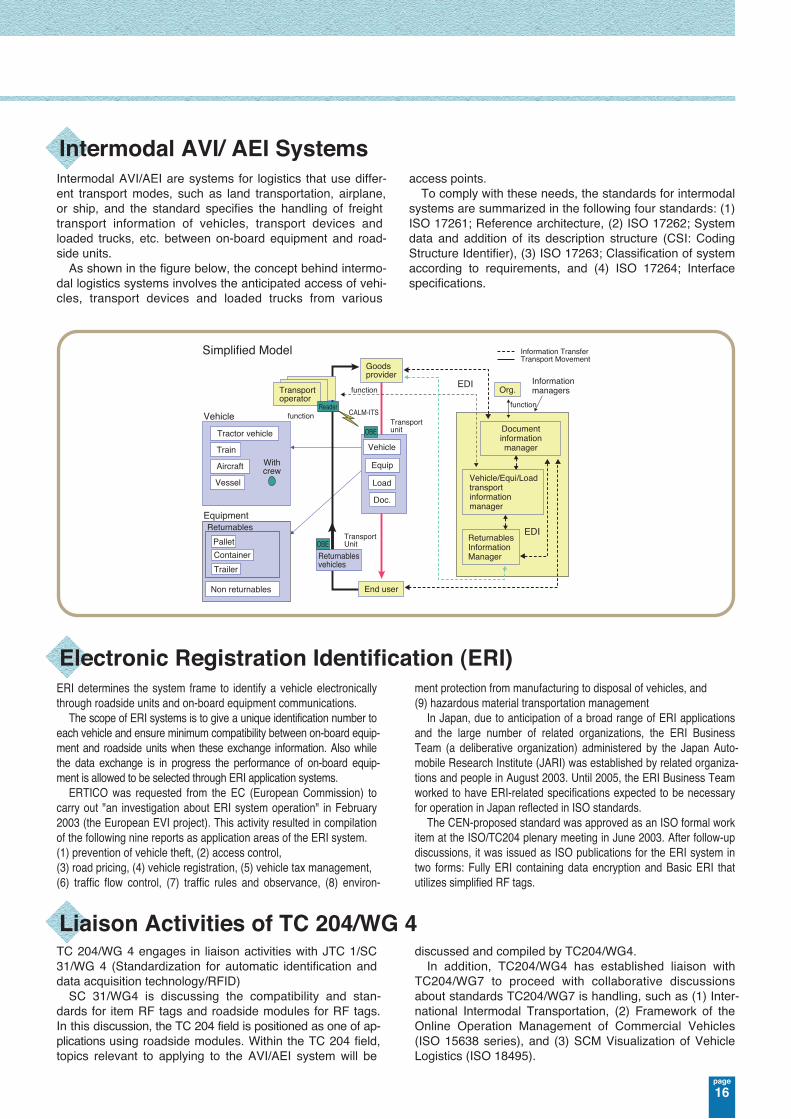
WG 4 is in charge of the standardization of items necessary for interoperability between systems for the AVI/AEI, automatic vehicle and equipment identification system, through electronic on-board equipment or simple media tags.
First, it discussed standardization issues concerning land transportation, such as trucks, and later added an intermo-dal AVI/AEI system concerning aviation and ship transporta-tion. In the wake of a proposal from CEN, deliberations began on Electronic Registration Identification (ERI) standards as an AVI/AEI applied system designed for environment protection, and ISO designated this as an official discussion item.
ISOs 14814, 14815, and 14816, which deal with AVI/AEI systems were all published as ISOs by March 2006.
ISOs 17261, 17262 and 17263, which deal with intermo-dal AVI/AEI systems were issued as ISO publications by September 2012 through collaborative work with WG7.3
(Data transfer of freight conveyance information). ISO 17264 was issued as an ISO publication in November 2009.
ERI standardization is divided into two parts: fully ERI (parts 1 to 5) ISO 24534 and simplified ERI (U.S. proposal) ISO 24535. Parts 1 to 4 of ISO 24534 were issued in July 2010 and Part 5, which uses the Japanese proposal of Symmetric Key Method was issued in December 2011 as ISO publications. ISO 24535 was published in September 2007 as an ISO publication.
In October 2014, Japan and three other countries formed the ASN.1 Task Team to work on ensuring compatibility between, and correct errors in, existing ISO documents using ASN.1 notation. The task team is dealing with correc-tion of ISOs 14816, 17262, 17264, 24534-3, 24534-4, and 24534-5. Now they have reached the stage where those corrected documents are subject to CD voting.
Intermodal AVI/ AEI Systems
TC 204/WG 4 engages in liaison activities with JTC 1/SC 31/WG 4 (Standardization for automatic identification and data acquisition technology/RFID)
SC 31/WG4 is discussing the compatibility and stan-dards for item RF tags and roadside modules for RF tags. In this discussion, the TC 204 field is positioned as one of ap-plications using roadside modules. Within the TC 204 field, topics relevant to applying to the AVI/AEI system will be
discussed and compiled by TC204/WG4.In addition, TC204/WG4 has established liaison with
TC204/WG7 to proceed with collaborative discussions about standards TC204/WG7 is handling, such as (1) Inter-national Intermodal Transportation, (2) Framework of the Online Operation Management of Commercial Vehicles (ISO 15638 series), and (3) SCM Visualization of Vehicle Logistics (ISO 18495).
Liaison Activities of TC 204/WG 4
ERI determines the system frame to identify a vehicle electronically through roadside units and on-board equipment communications.
The scope of ERI systems is to give a unique identification number to each vehicle and ensure minimum compatibility between on-board equip-ment and roadside units when these exchange information. Also while the data exchange is in progress the performance of on-board equip-ment is allowed to be selected through ERI application systems.
ERTICO was requested from the EC (European Commission) to carry out "an investigation about ERI system operation" in February 2003 (the European EVI project). This activity resulted in compilation of the following nine reports as application areas of the ERI system.(1) prevention of vehicle theft, (2) access control,(3) road pricing, (4) vehicle registration, (5) vehicle tax management,(6) traffic flow control, (7) traffic rules and observance, (8) environ-
ment protection from manufacturing to disposal of vehicles, and(9) hazardous material transportation management
In Japan, due to anticipation of a broad range of ERI applications and the large number of related organizations, the ERI Business Team (a deliberative organization) administered by the Japan Auto-mobile Research Institute (JARI) was established by related organiza-tions and people in August 2003. Until 2005, the ERI Business Team worked to have ERI-related specifications expected to be necessary for operation in Japan reflected in ISO standards.
The CEN-proposed standard was approved as an ISO formal work item at the ISO/TC204 plenary meeting in June 2003. After follow-up discussions, it was issued as ISO publications for the ERI system in two forms: Fully ERI containing data encryption and Basic ERI that utilizes simplified RF tags.
Electronic Registration Identification (ERI)
WG 4 Automatic Vehicle and Equipment Identification
Standardization themes ISO number Contents
List of WG 4 work items
1 ISO 14814 Standardization of architecture of AVI/AEI system
2 Automatic Vehicle And Equipment Identification - System Specifications ISO 14815 Standardization of classification of AVI/AEI system requirements
3 Automatic Vehicle And Equipment Identification - Numbering And Data Structures ISO 14816 Standardization of data compatibility of AVI/AEI system
4 Intermodal Goods Transport - Architecture And Terminology ISO 17261 Standardization of architecture of intermodal AEI system
5 Intermodal Goods Transport - Numbering And Data Structures ISO 17262 Standardization of data structure of intermodal AEI system
6 Intermodal Goods Transport - System Parameters ISO 17263 Standardization of classification of intermodal AEI system
7 Intermodal Goods Transport - Interfaces ISO 17264 Standardization of interface specifications of intermodal AEI system
8 Electronic Registration Identification (ERI) For Vehicles Part 1~4 ISO 24534
9 Electronic Registration Identification (ERI) For Vehicles Part 5 ISO 24534-5 Standardization of security using symmetric key method in the above ERI system
10 Basic Electronic Registration Identification (Basic ERI) ISO 24535 Standardization of specifications for more simpler ERI system
Scope of WG 4
Automatic Vehicle And Equipment Identification - Reference Architectures And Terminology
Standardization of specifications for a system where roadside equipment reads vehicle data electronically registered in on-board equipment
Intermodal AVI/AEI are systems for logistics that use differ-ent transport modes, such as land transportation, airplane, or ship, and the standard specifies the handling of freight transport information of vehicles, transport devices and loaded trucks, etc. between on-board equipment and road-side units.
As shown in the figure below, the concept behind intermo-dal logistics systems involves the anticipated access of vehi-cles, transport devices and loaded trucks from various
access points. To comply with these needs, the standards for intermodal
systems are summarized in the following four standards: (1) ISO 17261; Reference architecture, (2) ISO 17262; System data and addition of its description structure (CSI: Coding Structure Identifier), (3) ISO 17263; Classification of system according to requirements, and (4) ISO 17264; Interface specifications.
Vehicle
Transportoperator
Returnablesvehicles
Vehicle
Equip
Load
Doc.
End user
Goodsprovider
Org.
Documentinformationmanager
Informationmanagers
Vehicle/Equi/Loadtransportinformationmanager
ReturnablesInformationManager
EDI
EDI
Tractor vehicle
Pallet
functionTransportunit
Information TransferTransport Movement
TransportUnitOBE
OBE
ReaderCALM-ITS
function
function
Returnables
Non returnables
Container
Trailer
Train
Aircraft
Vessel
Withcrew
Equipment
Simplified Model
Item(s) that Japan is / has been actively working on
page
16

The GNSS/CN based EFC was approved as a work item in 1997. The toll collection system for Heavy Goods Vehicles (HGV) in Germany since 2005, and Belgium since 2016 adopted this system. The on-board equipment is continuously positioning the geodetic coordi-nate of the present location with the GNSS (GPS) receiver built in, and executes toll collec-tion referring the tariff data downloaded via cellular network. Various means of calculating fee, including on-board processing or center processing, are available. A variety of charging methods can be applied, such as zone charg-ing for each virtual charging area entered, and distance-based charging applied to how far the vehicle has traveled. The figure illustrates
integrated on-board equipment with DSRC method.
Application Interface Definition for Autonomous Systems (GNSS/CN)
WG 5 is working on standardizing Electronic Fee Collection (EFC), which includes ETC (Electronic Toll Collection) as well as all other charging and settlement such as tolls for roads, fees for parking lots or ferries. This WG is currently focusing on ETC systems. The communication between vehicle and roadside equipment is based on Dedicated Short Range Communications (DSRC) and additionally based on GNSS/CN which uses global navigation satellite systems (GNSS) and cellular networks (CN). The GNSS/CN system was renamed as autonomous system at the 2008 TC 204 plenary meeting. The autonomous system is a joint work item between the ISO and CEN, and its main standards were completed in 2010.
In April 2004, the European Union (EU) issued "the Directive on the interoper-ability of electronic road toll systems in the Community" (EFC directive). The directive recommends the adoption of the GNSS/CN (autonomous) system as the electronic road tolling system in Europe, but it does not exclude coexistence with
the conventional DSRC system. On October 6, 2009, the EC adopted a decision establishing detailed definitions for the European Electronic Toll Service (EETS).
Although the EETS was scheduled to apply to heavy goods vehicles in October 2012 and to light vehicles in October 2014, progress on the EETS was not favorable. In September 2012, the European Commission called for development of regional EETS systems. In April 2016, operation of autonomous EFC systems was launched in Belgium.
In addition, three new working items, as recent proposals from Japan, were approved at the October 2015 plenary meeting. In collaboration with members in Europe and Korea, the WG is working on new proposals, such as common payment schemes that can be used across various transport modes and research on traffic management supported by tolling and toll technologies in relation to Japan's toll method through capturing routes, aimed at reaching international standardization.
WG 5 Fee and Toll Collection
Overall Structure of EFC, Scope of WG 5, and DSRC method EFC
List of WG 5 work items
EFC-related entities include Card Issuers, Service Providers, Clearing Operators, and Collection Agencies, whose relationship is shown in the right figure. WG 5 is working on the standardization of the EFC application interface (data elements, command definitions, and other factors) both for DSRC and GNSS/CN, which are means of commu-nication between Service Providers and Users, and on the standardization of the test procedures and data security. Work on the standardization of DSRC is performed by TC 204 WG 15 and ITU-R SG 5.
Entities involved in EFC and Scope of WG 5
Payment system B
IC card
WG 5 defines interfaceDSRC (WG 15, ITU-R)
Scope of ISO/TC 204/WG 5Payment system A
Card Issuer
Third-party creditresearch company
Enforcement operatorCollection Agency
Service Provider
Clearing Operator Clearing Operator
User(on-board equipment)
ETC system configuration in Japan and relationship with ISO and other standards
ISO/IS 17573
ISO/IS 12855
ISO/TS 14907-1ISO/TS 14907-2
ISO/TS 17574
ISO/IS 14906, TS25110
ISO/IS 15628 (Layer 7)Rec. ITU-R M.1453 (Layer 1)
Payment Billing Issuing
The figure below shows the ETC system configuration in Japan, and the corresponding ISO standards and ITU recommendations
SAM: Secure Application Module
Integrated management center
Road operators Road operators
Road operator center
Roadside equipment
Roadside serverRoadside SAM
Roadside radio equipment
DSRC protocol
EFC architecture
I/F for clearing between operators
Test procedures for EFC equipment
Security framework
Application I/F for DSRC
DSRC
Card issuer
User
On-board equipment
IC cardOn-board applications
On-board SAM
DSRC protocol
This defines the expandable DSRC-OBE to allow its use as, for example, an autonomous EFC-OBE connecting the DSRC-OBE
and an external OBE device. The DTS ballot was held in Decem-ber 2013, and officially published in 2014.
Interface definition between DSRC-OBE and external in-vehicle devices (TS 16785)
Part 1 reports on research into schemes allowing the use of ETC and/or public transportation cards as common payment media. PWI 21193 is joint work item with Japan and Korea and
explains requirements and data definition for allowing common usage among various transportations by using a common media.
Investigation of EFC Standards for Common Payment Scheme for Multi-Modal Transport Services (TR 19639, PWI TS21193)
TR 21190 is a research report that is resulted from investigating on new toll policy and corresponding technologies each country that are considered to introduce in any countries, and proposing
new work items. PWI 21192 will describe a concept model and the data definition between entities in relation to traffic manage-ment with dynamic tolling based on traffic demand.
Charging policy and technology (PWI TR 21190,PWI TS 21192)
Example of integrated on-board equipment
On-board equipment
Cellular transmitter-receiver
Center equipment
DSRC transmitter-receiver Enforcement transmitter-receiver
Roadside and mobile enforcement equipment
GNSS receiver
IC Card
(Option)
GNSS (GPS) satellites
(Option)
DSRC roadside equipment
DSRC
GNSS (GPS)
DSRC RF or IRCellular network (CN)
Within the scope of ISO/TS 17575
There are two major EFC-related charging methods. One is the center charging method predominant in Europe and the U.S, and the other is the on-board charging system using IC-card used in Japan, Korea and other Asian countries. The
TS 25110 application interface that enables roadside equipment to access IC cards via DSRC and on-board equipment is modeled on the Japanese and Korean ETC systems.
Interface Definition for On-board Account Using Integrated Circuit Cards
EFC - Evaluation of equipment for conformity to CEN ISO/TS 17575-1~3
Charging performance Parts 1 & 2
Interface definition between DSRC-OBE and external in-vehicle devices
Investigation of EFC standards for common payment scheme for multi-modal transport services
TS 16407TS 16401TS 16410
TS 17444
TS 16785
TR 19639
Conformity evaluation methods for TS17575 (Application interface definition for autonomous systems)Part 1: Charging, Part 2: Communication and connection to the lower layers, Part 3: Context data
EFC performance standard (metrics) and inspection framework
Interface for extending DSRC OBE to autonomous systems (EFC using GNSS/CN)
Scheme for the common use of cards and other media for transport services
13
EFC–application interface definition for dedicated short-range communication ISO 14906
Prescription of data structures, commands and other factors to ensure the interoperability of EFC applications for DSRC based EFC1
EFC–Systems Architecture for Vehicle-related tolling ISO 17573Definition of reference architecture for the entire EFC system and prescription of frameworks of various EFC-related conditions3
EFC–Application Interface Definition for EFC based on autonomous systems ISO 17575
Prescription of data structures, commands and other factors to ensure the interoperability of EFC applications for autonomous systems (GNSS/CN)6
Interface Definition for On-board Account UsingIntegrated Circuit Cards TS 25110
Interface definition between roadside equipment and on-board equipment using IC cardsthat enable reading and writing of EFC information and account information on IC cards7
Compliance Checking of autonomous systemsover DSRC DIS/TS 12813
Checking the correct charging of autonomous EFC OBE by downloading the vehicle data via DSRC initiated by roadside equipment.8
Localization Correction Communication for Autonomous (GNSS/CN method) Systems DIS/TS 13141
Describes the communication requirements for enhancing the locating function of OBE for the autonomous system (GNSS/CN) using DSRC
EFC–test procedures for user and fixed equipment - Part 1~2 TS 14907Part 1 defines procedures and conditions for tests of EFC-related equipment.Part 2 defines conformance tests for on-board equipment, conforming to the EFC application interface definition (ISO 14906).2
EFC–Guidelines for EFC Security Proteciton Profiles TS 17574 Provision for EFC security establishment in reference to ISO/IEC 15408 (IT security evaluation standard) 4
EFC–Security Framework TS 19299 Prescribe the framework to develop EFC security system by risk assessment and definition of system model.5
Information Exchange between Service Provision and Toll Charging ISO 12855 Describes the information flow between EFC service providers and parties who charge fees.9
10
Conformity Evaluation of On-board and Roadside Equipment to CEN ISO/TS12813-Part 1 & 2 TS 13143
Defines conformity evaluation methods for the interfaces defined in TS12813 (Compliance check communication for autonomous systems) between OBE and roadside equipment11
Conformity Evaluation of On-board and RoadsideEquipment to “Localisation augmentation forautonomous systems”-Part 1 & 2
TS 13140Defines conformity evaluation methods for the interfaces defined in DTS13141(Localisation augmentation communication for autonomous systems) between OBE and roadside equipment
12
14
15
16
Standardization themes ISO number Contents
Item(s) that Japan is / has been actively working on
Investigation of charging policies and technologies for future standardization ISO PWI TR 21190
Proposing new work items based on research on new toll policy and corresponding technologies that are considered to introduce in any countries.17
EFC support for traffic management ISO PWI TR 21192Creating a common concept model of traffic management with dynamic tolling, and defining data exchange between entities.18
Requirements for EFC application interface on common media ISO PWI TR 21193
In accordance with proposal in TR19639, describes the requirement and data definition of common media for allowing common usage among various transportations.19
page
17

The GNSS/CN based EFC was approved as a work item in 1997. The toll collection system for Heavy Goods Vehicles (HGV) in Germany since 2005, and Belgium since 2016 adopted this system. The on-board equipment is continuously positioning the geodetic coordi-nate of the present location with the GNSS (GPS) receiver built in, and executes toll collec-tion referring the tariff data downloaded via cellular network. Various means of calculating fee, including on-board processing or center processing, are available. A variety of charging methods can be applied, such as zone charg-ing for each virtual charging area entered, and distance-based charging applied to how far the vehicle has traveled. The figure illustrates
integrated on-board equipment with DSRC method.
Application Interface Definition for Autonomous Systems (GNSS/CN)
WG 5 is working on standardizing Electronic Fee Collection (EFC), which includes ETC (Electronic Toll Collection) as well as all other charging and settlement such as tolls for roads, fees for parking lots or ferries. This WG is currently focusing on ETC systems. The communication between vehicle and roadside equipment is based on Dedicated Short Range Communications (DSRC) and additionally based on GNSS/CN which uses global navigation satellite systems (GNSS) and cellular networks (CN). The GNSS/CN system was renamed as autonomous system at the 2008 TC 204 plenary meeting. The autonomous system is a joint work item between the ISO and CEN, and its main standards were completed in 2010.
In April 2004, the European Union (EU) issued "the Directive on the interoper-ability of electronic road toll systems in the Community" (EFC directive). The directive recommends the adoption of the GNSS/CN (autonomous) system as the electronic road tolling system in Europe, but it does not exclude coexistence with
the conventional DSRC system. On October 6, 2009, the EC adopted a decision establishing detailed definitions for the European Electronic Toll Service (EETS).
Although the EETS was scheduled to apply to heavy goods vehicles in October 2012 and to light vehicles in October 2014, progress on the EETS was not favorable. In September 2012, the European Commission called for development of regional EETS systems. In April 2016, operation of autonomous EFC systems was launched in Belgium.
In addition, three new working items, as recent proposals from Japan, were approved at the October 2015 plenary meeting. In collaboration with members in Europe and Korea, the WG is working on new proposals, such as common payment schemes that can be used across various transport modes and research on traffic management supported by tolling and toll technologies in relation to Japan's toll method through capturing routes, aimed at reaching international standardization.
WG 5 Fee and Toll Collection
Overall Structure of EFC, Scope of WG 5, and DSRC method EFC
List of WG 5 work items
EFC-related entities include Card Issuers, Service Providers, Clearing Operators, and Collection Agencies, whose relationship is shown in the right figure. WG 5 is working on the standardization of the EFC application interface (data elements, command definitions, and other factors) both for DSRC and GNSS/CN, which are means of commu-nication between Service Providers and Users, and on the standardization of the test procedures and data security. Work on the standardization of DSRC is performed by TC 204 WG 15 and ITU-R SG 5.
Entities involved in EFC and Scope of WG 5
Payment system B
IC card
WG 5 defines interfaceDSRC (WG 15, ITU-R)
Scope of ISO/TC 204/WG 5Payment system A
Card Issuer
Third-party creditresearch company
Enforcement operatorCollection Agency
Service Provider
Clearing Operator Clearing Operator
User(on-board equipment)
ETC system configuration in Japan and relationship with ISO and other standards
ISO/IS 17573
ISO/IS 12855
ISO/TS 14907-1ISO/TS 14907-2
ISO/TS 17574
ISO/IS 14906, TS25110
ISO/IS 15628 (Layer 7)Rec. ITU-R M.1453 (Layer 1)
Payment Billing Issuing
The figure below shows the ETC system configuration in Japan, and the corresponding ISO standards and ITU recommendations
SAM: Secure Application Module
Integrated management center
Road operators Road operators
Road operator center
Roadside equipment
Roadside serverRoadside SAM
Roadside radio equipment
DSRC protocol
EFC architecture
I/F for clearing between operators
Test procedures for EFC equipment
Security framework
Application I/F for DSRC
DSRC
Card issuer
User
On-board equipment
IC cardOn-board applications
On-board SAM
DSRC protocol
This defines the expandable DSRC-OBE to allow its use as, for example, an autonomous EFC-OBE connecting the DSRC-OBE
and an external OBE device. The DTS ballot was held in Decem-ber 2013, and officially published in 2014.
Interface definition between DSRC-OBE and external in-vehicle devices (TS 16785)
Part 1 reports on research into schemes allowing the use of ETC and/or public transportation cards as common payment media. PWI 21193 is joint work item with Japan and Korea and
explains requirements and data definition for allowing common usage among various transportations by using a common media.
Investigation of EFC Standards for Common Payment Scheme for Multi-Modal Transport Services (TR 19639, PWI TS21193)
TR 21190 is a research report that is resulted from investigating on new toll policy and corresponding technologies each country that are considered to introduce in any countries, and proposing
new work items. PWI 21192 will describe a concept model and the data definition between entities in relation to traffic manage-ment with dynamic tolling based on traffic demand.
Charging policy and technology (PWI TR 21190,PWI TS 21192)
Example of integrated on-board equipment
On-board equipment
Cellular transmitter-receiver
Center equipment
DSRC transmitter-receiver Enforcement transmitter-receiver
Roadside and mobile enforcement equipment
GNSS receiver
IC Card
(Option)
GNSS (GPS) satellites
(Option)
DSRC roadside equipment
DSRC
GNSS (GPS)
DSRC RF or IRCellular network (CN)
Within the scope of ISO/TS 17575
There are two major EFC-related charging methods. One is the center charging method predominant in Europe and the U.S, and the other is the on-board charging system using IC-card used in Japan, Korea and other Asian countries. The
TS 25110 application interface that enables roadside equipment to access IC cards via DSRC and on-board equipment is modeled on the Japanese and Korean ETC systems.
Interface Definition for On-board Account Using Integrated Circuit Cards
EFC - Evaluation of equipment for conformity to CEN ISO/TS 17575-1~3
Charging performance Parts 1 & 2
Interface definition between DSRC-OBE and external in-vehicle devices
Investigation of EFC standards for common payment scheme for multi-modal transport services
TS 16407TS 16401TS 16410
TS 17444
TS 16785
TR 19639
Conformity evaluation methods for TS17575 (Application interface definition for autonomous systems)Part 1: Charging, Part 2: Communication and connection to the lower layers, Part 3: Context data
EFC performance standard (metrics) and inspection framework
Interface for extending DSRC OBE to autonomous systems (EFC using GNSS/CN)
Scheme for the common use of cards and other media for transport services
13
EFC–application interface definition for dedicated short-range communication ISO 14906
Prescription of data structures, commands and other factors to ensure the interoperability of EFC applications for DSRC based EFC1
EFC–Systems Architecture for Vehicle-related tolling ISO 17573Definition of reference architecture for the entire EFC system and prescription of frameworks of various EFC-related conditions3
EFC–Application Interface Definition for EFC based on autonomous systems ISO 17575
Prescription of data structures, commands and other factors to ensure the interoperability of EFC applications for autonomous systems (GNSS/CN)6
Interface Definition for On-board Account UsingIntegrated Circuit Cards TS 25110
Interface definition between roadside equipment and on-board equipment using IC cardsthat enable reading and writing of EFC information and account information on IC cards7
Compliance Checking of autonomous systemsover DSRC DIS/TS 12813
Checking the correct charging of autonomous EFC OBE by downloading the vehicle data via DSRC initiated by roadside equipment.8
Localization Correction Communication for Autonomous (GNSS/CN method) Systems DIS/TS 13141
Describes the communication requirements for enhancing the locating function of OBE for the autonomous system (GNSS/CN) using DSRC
EFC–test procedures for user and fixed equipment - Part 1~2 TS 14907Part 1 defines procedures and conditions for tests of EFC-related equipment.Part 2 defines conformance tests for on-board equipment, conforming to the EFC application interface definition (ISO 14906).2
EFC–Guidelines for EFC Security Proteciton Profiles TS 17574 Provision for EFC security establishment in reference to ISO/IEC 15408 (IT security evaluation standard) 4
EFC–Security Framework TS 19299 Prescribe the framework to develop EFC security system by risk assessment and definition of system model.5
Information Exchange between Service Provision and Toll Charging ISO 12855 Describes the information flow between EFC service providers and parties who charge fees.9
10
Conformity Evaluation of On-board and Roadside Equipment to CEN ISO/TS12813-Part 1 & 2 TS 13143
Defines conformity evaluation methods for the interfaces defined in TS12813 (Compliance check communication for autonomous systems) between OBE and roadside equipment11
Conformity Evaluation of On-board and RoadsideEquipment to “Localisation augmentation forautonomous systems”-Part 1 & 2
TS 13140Defines conformity evaluation methods for the interfaces defined in DTS13141(Localisation augmentation communication for autonomous systems) between OBE and roadside equipment
12
14
15
16
Standardization themes ISO number Contents
Item(s) that Japan is / has been actively working on
Investigation of charging policies and technologies for future standardization ISO PWI TR 21190
Proposing new work items based on research on new toll policy and corresponding technologies that are considered to introduce in any countries.17
EFC support for traffic management ISO PWI TR 21192Creating a common concept model of traffic management with dynamic tolling, and defining data exchange between entities.18
Requirements for EFC application interface on common media ISO PWI TR 21193
In accordance with proposal in TR19639, describes the requirement and data definition of common media for allowing common usage among various transportations.19
page
18
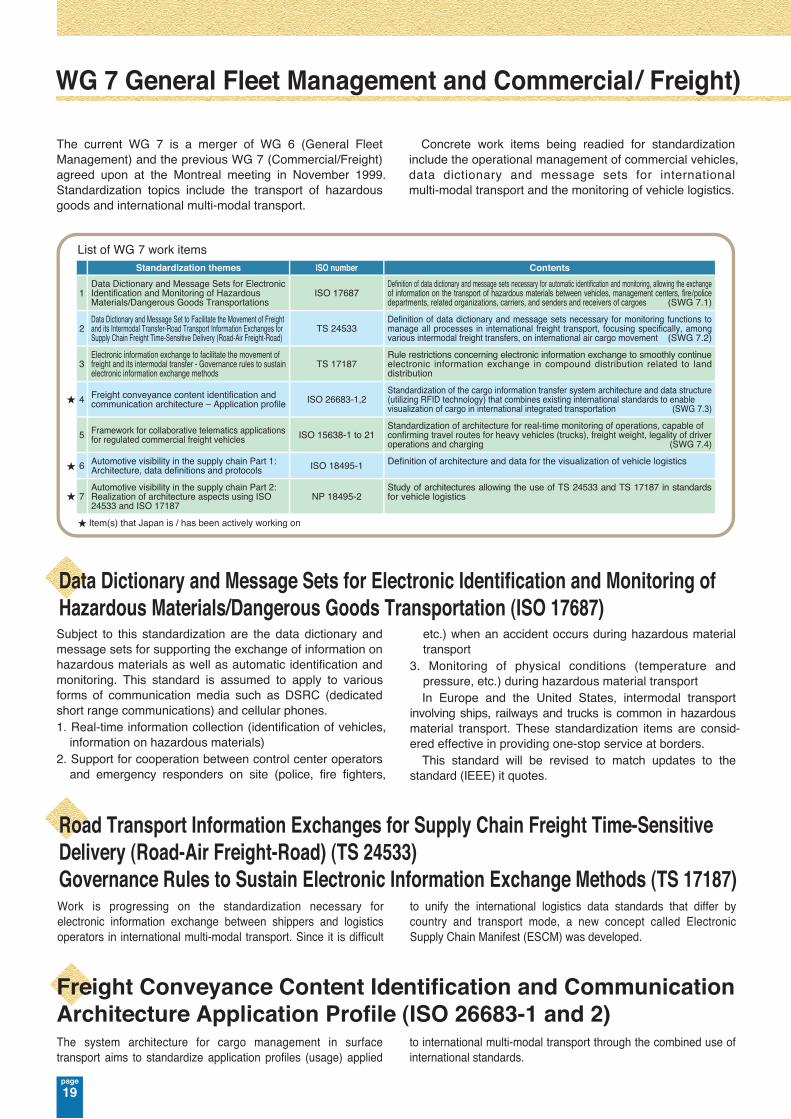
This set of standards covers ITS service applications using an architectural framework comprising with on board units such as mass sensors and GPS receivers in regulated commercial freight vehicles, the data path from those devices to regulatory authorities, and relevant information gathering and provision services provided by service providers to provide regulatory and operation data to users (freight operators). A trend of digital tachographs in the United States and Europe (next-generation tachographs to be planned to be deployed in Europe by 2018) is to be a driving force for the actual large scale deployment of Framework for Collaborative Telematics Applications for Regulated Commercial Freight
Framework for Collaborative Telematics Applications for Regulated Commercial Freight Vehicles (ISO 15638 Parts 1 to 21)
Vehicles (ISO 15638 Parts 1 to 21) for the operational management of commercial vehicles. The idea combining the digital tachograph and on-board weight sensors for heavy vehicle monitoring (overloading vehicles) is expected to be feasible in the near future. At the April 2015 Hangzhou meeting, Part 20: Weigh in motion (proposed by EU) and Part 21: Enhancements using roadside sensors (proposed by Japan) were approved as PWIs. Combining those two items will be an important service application for the operational management and weight monitoring of heavy vehicles. In Part 21, activities of deployment of Japanese ETC2.0 C-ITS service are referenced.
List of WG 7 work items
The system architecture for cargo management in surface transport aims to standardize application profiles (usage) applied
to international multi-modal transport through the combined use of international standards.
It is intended for the international standardization of surveillance and management systems encompassing identification (ID) and database (types of data: what, when, where, and how) for the
transport of fully assembled vehicles, from delivery from the factory until the time of sale.
Freight Conveyance Content Identification and Communication Architecture Application Profile (ISO 26683-1 and 2)
Automotive Vehicles Visibility System in the Supply Chain (ISO 18495-1)
WG7 Japanese committee believes the ISO 15638 series set of standards are key ITS standards for efficient and safe urban logistic realization. The committee is planning to propose new PWIs for the standardization work for ITS service applications that
utilizes ETC2.0 C-ITS framework (such as monitoring vehicle speed with the provision of recommended vehicle speed per vehicle's center of gravity information to avoid trailer turnover accidents in land transportation of freight containers).
Urban ITS standardization
15638 seriesISO Number Title
Common platform parameters using CALMISO 15638-2
Operating requirements, 'Approval Authority' procedures, and enforcement provisions for the providers of regulated servicesISO 15638-3
Generic vehicle informationISO 15638-5
Other applicationsISO 15638-7
Remote electronic tachograph monitoring (RTM)DIS 15638-9
Driver work records (work and rest hours compliance) (DWR)ISO 15638-11
'Mass' information for jurisdictional contntrol and enforcement (MICE)ISO TS 15638-13
Vehicle location monitoring (VLM)ISO 15638-15
System security requirementsCD 15638-4
Regulated applicationsISO 15638-6
Vehicle access managementISO 15638-8
Emergency messaging system/eCall (EMS)DIS 15638-10
Vehicle mass monitoring (VMM)ISO 15638-12
Vehicle access control (VAC)ISO 15638-14
Vehicle speed monitoring (VSM)ISO 15638-16
Consignment and location monitoring (CLM)ISO 15638-17
ADR (dangerous goods) transport monitoring (ADR)DIS 15638-18
Vehicle parking facilities (VPF)ISO TS 15638-19
Weigh-in-MotionCD 15638-20
Enhancements using roadside sensors (ERS)NP 15638-21
Framework and architectureISO 15638-1
Serviceproviders
Enrolment/privacy consents
Regulated service offerings/requirements
Certification& Auditing
Excep
tion
repo
rts
vehi
cle
data
for e
nfor
cem
ent
Appoints
Certificationauthority
Roadsidesensors/VMS/info
Excep
tion
repo
rts Service provision
Vehicle Data
Fees
Applicationservices
UsersJurisdictions
WG 7 General Fleet Management and Commercial / Freight)
The current WG 7 is a merger of WG 6 (General Fleet Management) and the previous WG 7 (Commercial/Freight) agreed upon at the Montreal meeting in November 1999. Standardization topics include the transport of hazardous goods and international multi-modal transport.
Concrete work items being readied for standardization include the operational management of commercial vehicles, data dictionary and message sets for international multi-modal transport and the monitoring of vehicle logistics.
Subject to this standardization are the data dictionary and message sets for supporting the exchange of information on hazardous materials as well as automatic identification and monitoring. This standard is assumed to apply to various forms of communication media such as DSRC (dedicated short range communications) and cellular phones.1. Real-time information collection (identification of vehicles,
information on hazardous materials)2. Support for cooperation between control center operators
and emergency responders on site (police, fire fighters,
etc.) when an accident occurs during hazardous material transport
3. Monitoring of physical conditions (temperature and pressure, etc.) during hazardous material transportIn Europe and the United States, intermodal transport
involving ships, railways and trucks is common in hazardous material transport. These standardization items are consid-ered effective in providing one-stop service at borders.
This standard will be revised to match updates to the standard (IEEE) it quotes.
Work is progressing on the standardization necessary for electronic information exchange between shippers and logistics operators in international multi-modal transport. Since it is difficult
to unify the international logistics data standards that differ by country and transport mode, a new concept called Electronic Supply Chain Manifest (ESCM) was developed.
Data Dictionary and Message Sets for Electronic Identification and Monitoring of Hazardous Materials/Dangerous Goods Transportation (ISO 17687)
Road Transport Information Exchanges for Supply Chain Freight Time-Sensitive Delivery (Road-Air Freight-Road) (TS 24533)Governance Rules to Sustain Electronic Information Exchange Methods (TS 17187)
Standardization themes ISO number Contents
1Data Dictionary and Message Sets for ElectronicIdentification and Monitoring of HazardousMaterials/Dangerous Goods Transportations
ISO 17687Definition of data dictionary and message sets necessary for automatic identification and monitoring, allowing the exchange of information on the transport of hazardous materials between vehicles, management centers, fire/police departments, related organizations, carriers, and senders and receivers of cargoes (SWG 7.1)
2Data Dictionary and Message Set to Facilitate the Movement of Freightand its Intermodal Transfer-Road Transport Information Exchanges forSupply Chain Freight Time-Sensitive Delivery (Road-Air Freight-Road)
TS 24533Definition of data dictionary and message sets necessary for monitoring functions to manage all processes in international freight transport, focusing specifically, among various intermodal freight transfers, on international air cargo movement (SWG 7.2)
3Electronic information exchange to facilitate the movement of freight and its intermodal transfer - Governance rules to sustain electronic information exchange methods
TS 17187Rule restrictions concerning electronic information exchange to smoothly continue electronic information exchange in compound distribution related to land distribution
4 Freight conveyance content identification and communication architecture – Application profile ISO 26683-1,2
Standardization of the cargo information transfer system architecture and data structure (utilizing RFID technology) that combines existing international standards to enable visualization of cargo in international integrated transportation (SWG 7.3)
5 Framework for collaborative telematics applications for regulated commercial freight vehicles ISO 15638-1 to 21
Standardization of architecture for real-time monitoring of operations, capable of confirming travel routes for heavy vehicles (trucks), freight weight, legality of driver operations and charging (SWG 7.4)
6 Automotive visibility in the supply chain Part 1: Architecture, data definitions and protocols ISO 18495-1 Definition of architecture and data for the visualization of vehicle logistics
7Automotive visibility in the supply chain Part 2: Realization of architecture aspects using ISO 24533 and ISO 17187
NP 18495-2Study of architectures allowing the use of TS 24533 and TS 17187 in standards for vehicle logistics
Item(s) that Japan is / has been actively working on
page
19

This set of standards covers ITS service applications using an architectural framework comprising with on board units such as mass sensors and GPS receivers in regulated commercial freight vehicles, the data path from those devices to regulatory authorities, and relevant information gathering and provision services provided by service providers to provide regulatory and operation data to users (freight operators). A trend of digital tachographs in the United States and Europe (next-generation tachographs to be planned to be deployed in Europe by 2018) is to be a driving force for the actual large scale deployment of Framework for Collaborative Telematics Applications for Regulated Commercial Freight
Framework for Collaborative Telematics Applications for Regulated Commercial Freight Vehicles (ISO 15638 Parts 1 to 21)
Vehicles (ISO 15638 Parts 1 to 21) for the operational management of commercial vehicles. The idea combining the digital tachograph and on-board weight sensors for heavy vehicle monitoring (overloading vehicles) is expected to be feasible in the near future. At the April 2015 Hangzhou meeting, Part 20: Weigh in motion (proposed by EU) and Part 21: Enhancements using roadside sensors (proposed by Japan) were approved as PWIs. Combining those two items will be an important service application for the operational management and weight monitoring of heavy vehicles. In Part 21, activities of deployment of Japanese ETC2.0 C-ITS service are referenced.
List of WG 7 work items
The system architecture for cargo management in surface transport aims to standardize application profiles (usage) applied
to international multi-modal transport through the combined use of international standards.
It is intended for the international standardization of surveillance and management systems encompassing identification (ID) and database (types of data: what, when, where, and how) for the
transport of fully assembled vehicles, from delivery from the factory until the time of sale.
Freight Conveyance Content Identification and Communication Architecture Application Profile (ISO 26683-1 and 2)
Automotive Vehicles Visibility System in the Supply Chain (ISO 18495-1)
WG7 Japanese committee believes the ISO 15638 series set of standards are key ITS standards for efficient and safe urban logistic realization. The committee is planning to propose new PWIs for the standardization work for ITS service applications that
utilizes ETC2.0 C-ITS framework (such as monitoring vehicle speed with the provision of recommended vehicle speed per vehicle's center of gravity information to avoid trailer turnover accidents in land transportation of freight containers).
Urban ITS standardization
15638 seriesISO Number Title
Common platform parameters using CALMISO 15638-2
Operating requirements, 'Approval Authority' procedures, and enforcement provisions for the providers of regulated servicesISO 15638-3
Generic vehicle informationISO 15638-5
Other applicationsISO 15638-7
Remote electronic tachograph monitoring (RTM)DIS 15638-9
Driver work records (work and rest hours compliance) (DWR)ISO 15638-11
'Mass' information for jurisdictional contntrol and enforcement (MICE)ISO TS 15638-13
Vehicle location monitoring (VLM)ISO 15638-15
System security requirementsCD 15638-4
Regulated applicationsISO 15638-6
Vehicle access managementISO 15638-8
Emergency messaging system/eCall (EMS)DIS 15638-10
Vehicle mass monitoring (VMM)ISO 15638-12
Vehicle access control (VAC)ISO 15638-14
Vehicle speed monitoring (VSM)ISO 15638-16
Consignment and location monitoring (CLM)ISO 15638-17
ADR (dangerous goods) transport monitoring (ADR)DIS 15638-18
Vehicle parking facilities (VPF)ISO TS 15638-19
Weigh-in-MotionCD 15638-20
Enhancements using roadside sensors (ERS)NP 15638-21
Framework and architectureISO 15638-1
Serviceproviders
Enrolment/privacy consents
Regulated service offerings/requirements
Certification& Auditing
Excep
tion
repo
rts
vehi
cle
data
for e
nfor
cem
ent
Appoints
Certificationauthority
Roadsidesensors/VMS/info
Excep
tion
repo
rts Service provision
Vehicle Data
Fees
Applicationservices
UsersJurisdictions
WG 7 General Fleet Management and Commercial / Freight)
The current WG 7 is a merger of WG 6 (General Fleet Management) and the previous WG 7 (Commercial/Freight) agreed upon at the Montreal meeting in November 1999. Standardization topics include the transport of hazardous goods and international multi-modal transport.
Concrete work items being readied for standardization include the operational management of commercial vehicles, data dictionary and message sets for international multi-modal transport and the monitoring of vehicle logistics.
Subject to this standardization are the data dictionary and message sets for supporting the exchange of information on hazardous materials as well as automatic identification and monitoring. This standard is assumed to apply to various forms of communication media such as DSRC (dedicated short range communications) and cellular phones.1. Real-time information collection (identification of vehicles,
information on hazardous materials)2. Support for cooperation between control center operators
and emergency responders on site (police, fire fighters,
etc.) when an accident occurs during hazardous material transport
3. Monitoring of physical conditions (temperature and pressure, etc.) during hazardous material transportIn Europe and the United States, intermodal transport
involving ships, railways and trucks is common in hazardous material transport. These standardization items are consid-ered effective in providing one-stop service at borders.
This standard will be revised to match updates to the standard (IEEE) it quotes.
Work is progressing on the standardization necessary for electronic information exchange between shippers and logistics operators in international multi-modal transport. Since it is difficult
to unify the international logistics data standards that differ by country and transport mode, a new concept called Electronic Supply Chain Manifest (ESCM) was developed.
Data Dictionary and Message Sets for Electronic Identification and Monitoring of Hazardous Materials/Dangerous Goods Transportation (ISO 17687)
Road Transport Information Exchanges for Supply Chain Freight Time-Sensitive Delivery (Road-Air Freight-Road) (TS 24533)Governance Rules to Sustain Electronic Information Exchange Methods (TS 17187)
page
20

WG 8 Public Transport and Emergency
WG 8 is responsible for the standardization of public transport. Public transport includes buses, trains, trams and emergency vehicles.
CEN has been leading standardization of the Interoperable fare manage-ment system (IFMS). IFMS Parts 2 and 3 have been issued as TRs, and Part 1 was reviewed in 2014.
The Public transport user information Part 1 proposed by Japan in autumn 2010, which encompasses the CEN Trans-Model, the US PTCIP,
and Japanese standards on passenger information in public transport, was issued as an ISO in spring 2014.
In the spring of 2016, a report was released from CEN/TC278 to support Urban ITS. From now on standardization is expected to be handled based on the contents of this report. It is reguired to pay close attention to these movements.
List of WG 8 work items
Data Dictionary and Message Sets for Pre-emption and Prioritization Signal Systemsfor Emergency and Public Vehicles: PRESTO (ISO 22951)
Importance of Public Transport
PRESTO is designed to exchange data efficiently for traffic signal preemption and prioritization so that public transport vehicles such as emergency vehi-cles, buses and trams can pass intersections preferentially over other vehi-
・Location referencing harmonization ・Mixed vendor environment ・Urban-ITS issues associated with autonomous/automated vehicles ・Traffic management system status, fault and quality standards・ITS communication and information protocols ・Data models and definitions for new modes ・Emissions management in urban areas ・Traffic management data models and interfaces
cles. Data is exchanged principally between vehicles and roadside units. The standardization scope includes data dictionaries and message sets in V2I/I2V communication fields.
WG 8 has adopted public transport as an important standardization subject as excessive dependence on automobiles to transport passen-gers and cargos causes serious harm to our society and lives, and damages sustainability. Reducing dependence on automobiles requires increasing urban density and making cities more compact to shift transport modes from automobiles to walking, bicycles and public transport. Automobiles, however, provide door-to-door transport and comfort, and the out-of-pocket costs borne by drivers are considered to be generally lower than those of public transport.
An effective way to promote a shift to public transport is to enhance its appeal. Information has an extremely important role to play in that
respect. The development of ICT has made it possible to select the most appropriate route using information such as public transport routes, transfers, operating conditions, required time and fare before starting out and while traveling. Dramatically enhancing the appeal of public transport requires not only the application of advanced informa-tion technology, but also the implementation of systematic and compre-hensive measures. The removal of physical barriers during transfers, the introduction of inexpensive and easy-to-understand fare systems, and simple payment methods are required. In addition, land use must give priority to the convenience of public transport users.
Scope of standardization
Emergency vehicles
Traffic signal Roadside equipment
Interoperable Fare Management System: IFMS (ISO24014 etc.)
Standardization for Urban ITS
Public Transport User Information (ISO 17185 etc.)
The Interoperable Fare Management System (IFMS) is a con-ceptual architecture for the overall coordination of related sys-tems to realize efficient operation and management of fare col-lection through IC cards and other payment methods in railways, buses and other public transport. In Europe, CEN/TC 278/WG 3 is leading the standardization of the system. In view of its significance, WG 8 decided to standard-ize IFMS in cooperation with CEN, and the PWI proposal for Part 1 was approved in October 2003.
Subsequently, the FDIS ballot was held in February 2007 and the ISO was pub-lished in June 2007. The experts and partic-ipants from Japan showed great persis-tence in negotiating with CEN and succeeded in having Japanese opinions re-flected in the ISO. The systematic review of Part 1 was completed in 2015.
In addition, following Part 1, the standard-ization of Part 2 began. However, because
its contents covered a wide range of topics, they were split into a new Parts 2 and 3. Japan served as editor for the new Part 2, in which a set of rules necessary for the actual applica-tion of IFMS has been compiled based on the architecture speci-fied in Part 1. Parts 2 and 3 have been issued as TRs.
- Part 2: Recommended business practices for set of rules- Part 3: Interoperability within a multi-application environment
In the spring of 2016, PT1701, one of project teams of CEN/TC 278, released a report titled "Standards and actions necessary to enable urban infrastructure coordination to support Urban-ITS". The report summarizes results from discussion on standards needed to support deployment of Urban ITS required for operation and management of urban areas, and includes the following eight fields that should be put high priorities:
Standardization items closely connected with public traffic include Transmodel (an existing CEN standard), IFOPT (standardization for stations of mass transportation), and activities of revision and expansion of NeTEx/SIRI.
As these items of standardization significantly affect urban traffic in our country, we must promote our opinions to be reflected in standardization while carefully watching future CEN movement.
Regarding information related to public transport, it was agreed in April 2007 that the standardization of reference model be started based on the Trans-Model established by CEN. As part of the preparation, it was agreed to prepare catalogs of public transport in member countries but this was postponed for a year due to a bud-getary constraint. Subsequently, the PWI was approved at the Bar-celona meeting in September 2009.
However, preparing catalogs of public transport information in individual countries takes a lot of time and effort, but offers limited
practical value. It was, therefore, decided to propose a compre-hensive standard including information for users of public trans-port in member countries. In addition to European Trans-Model and American PTCIP, Japanese standards will be included in it. Public transport user information Part 1 was proposed at the Jeju meeting in autumn 2010 and approved as a PWI. Standardization proceeded smoothly thereafter, and it was published as an ISO in 2014. The standardization of Parts 2 and 3 was performed in par-allel, and Part 3 was published as a TR in 2015.
Entities in IFMS
Productowner
Applicationowner
Collection&
forwarding
Application retailer
Product retailer
Customer
Customerservice
Serviceoperator
Securitymanager
Registrationagency
More specifically, traffic signals are controlled by prolonging the green light or shortening the red light based on information about the location, speed, destination and direction of travel at intersections of emergency vehi-cles so they can pass through intersections without hindrance. In addition, other vehicles and pedestrians can become aware of the presence of the emergency vehicle and avoid a potential collision. An ISO was issued in Janu-ary 2009. In 2014, it was subjected to a systematic review and approved in June in the same year.
Standardization themes ISO number Contents
1 Data dictionary and message sets for pre-emption and prioritizationsignal systems for emergency and public transport vehicles (PRESTO) ISO 22951 Standardization of data dictionary and message sets for traffic signal preemption
and prioritization for emergency and public transport vehicles
2 Public transport - Interoperable fare management system - Part 1: Architecture ISO 24014-1 Definition of conceptual architecture to establish a public transport fare
management system that accommodates multiple operators and services
3Public Transport - Interoperable fare management system - Part 2: Recommended business practices for set of rules
TR 24014-2 Description of the set of rules necessary for installing IFMS based on the architecture specified in Part 1 and the relationship among the rules
4 Public transport - Interoperable fare management system - Part 3: Interoperability within a multi-application environment TR 24014-3 Description of business practices within applications in multi-application environ-
ments and interoperability between applications
5 Public transport requirements for use of payment applications for fare media TR 14806 Standardization of IC card and other payment methods
6 Conformance testing for fare management systems PWI 20989 Standardization of comformance testing for fare management systems
7 Public transport user information Part 1 - Standards framework for public information systems ISO 17185-1 Establishment of a comprehensive standard including public transport
user information in various countries
8 Public transport user information Part 2 - Data and interface standards catalogue and cross reference NP 17185-2 Standardization of public transport user information interfaces and use
cases
9 Public transport user information Part 3 - Use cases for journey planning systems and their interoperation TR 17185-3 Standardization of use cases for journey planning systems and collaboration
among them
10 Public Transport User Information Part 4 - Use cases for mobility journey planning systems and their inter-operation PWI 17185-4 Standardization to define use case for trip planning systems to make them
interoperable.
11 Emergency evacuation and disaster response and recovery - Part 1: Framework TR 19083-1 Standardization of evacuation and restoration in an emergency
12 Emergency evacuation and disaster response and recovery - Part 2: Data flow WD 19083-2 Contents under development
13 Emergency evacuation and disaster response and recovery - Part 3: Use cases NP 19083-3 Contents under development
14 Account-based ticketing standards requirements PWI 20526 Contents under development
15 Common transport service account systems - Part 1: Framework and use cases NP 21724-1 Contents under development
16 Emergency services e-call device for emergency on connected vehicles using ITS station PWI 21344 Standard of devices for emergency e-call service in connected vehicles.
17 Synchronization of terminology and role models PWI 21733 Standard to unify terminology and role models.
18 Performance testing for connectivity and safety functions of automated driving bus PWI 21734 Contents under development
Item(s) that Japan is / has been actively working on
page
21

WG 8 Public Transport and Emergency
WG 8 is responsible for the standardization of public transport. Public transport includes buses, trains, trams and emergency vehicles.
CEN has been leading standardization of the Interoperable fare manage-ment system (IFMS). IFMS Parts 2 and 3 have been issued as TRs, and Part 1 was reviewed in 2014.
The Public transport user information Part 1 proposed by Japan in autumn 2010, which encompasses the CEN Trans-Model, the US PTCIP,
and Japanese standards on passenger information in public transport, was issued as an ISO in spring 2014.
In the spring of 2016, a report was released from CEN/TC278 to support Urban ITS. From now on standardization is expected to be handled based on the contents of this report. It is reguired to pay close attention to these movements.
List of WG 8 work items
Data Dictionary and Message Sets for Pre-emption and Prioritization Signal Systemsfor Emergency and Public Vehicles: PRESTO (ISO 22951)
Importance of Public Transport
PRESTO is designed to exchange data efficiently for traffic signal preemption and prioritization so that public transport vehicles such as emergency vehi-cles, buses and trams can pass intersections preferentially over other vehi-
・Location referencing harmonization ・Mixed vendor environment ・Urban-ITS issues associated with autonomous/automated vehicles ・Traffic management system status, fault and quality standards・ITS communication and information protocols ・Data models and definitions for new modes ・Emissions management in urban areas ・Traffic management data models and interfaces
cles. Data is exchanged principally between vehicles and roadside units. The standardization scope includes data dictionaries and message sets in V2I/I2V communication fields.
WG 8 has adopted public transport as an important standardization subject as excessive dependence on automobiles to transport passen-gers and cargos causes serious harm to our society and lives, and damages sustainability. Reducing dependence on automobiles requires increasing urban density and making cities more compact to shift transport modes from automobiles to walking, bicycles and public transport. Automobiles, however, provide door-to-door transport and comfort, and the out-of-pocket costs borne by drivers are considered to be generally lower than those of public transport.
An effective way to promote a shift to public transport is to enhance its appeal. Information has an extremely important role to play in that
respect. The development of ICT has made it possible to select the most appropriate route using information such as public transport routes, transfers, operating conditions, required time and fare before starting out and while traveling. Dramatically enhancing the appeal of public transport requires not only the application of advanced informa-tion technology, but also the implementation of systematic and compre-hensive measures. The removal of physical barriers during transfers, the introduction of inexpensive and easy-to-understand fare systems, and simple payment methods are required. In addition, land use must give priority to the convenience of public transport users.
Scope of standardization
Emergency vehicles
Traffic signal Roadside equipment
Interoperable Fare Management System: IFMS (ISO24014 etc.)
Standardization for Urban ITS
Public Transport User Information (ISO 17185 etc.)
The Interoperable Fare Management System (IFMS) is a con-ceptual architecture for the overall coordination of related sys-tems to realize efficient operation and management of fare col-lection through IC cards and other payment methods in railways, buses and other public transport. In Europe, CEN/TC 278/WG 3 is leading the standardization of the system. In view of its significance, WG 8 decided to standard-ize IFMS in cooperation with CEN, and the PWI proposal for Part 1 was approved in October 2003.
Subsequently, the FDIS ballot was held in February 2007 and the ISO was pub-lished in June 2007. The experts and partic-ipants from Japan showed great persis-tence in negotiating with CEN and succeeded in having Japanese opinions re-flected in the ISO. The systematic review of Part 1 was completed in 2015.
In addition, following Part 1, the standard-ization of Part 2 began. However, because
its contents covered a wide range of topics, they were split into a new Parts 2 and 3. Japan served as editor for the new Part 2, in which a set of rules necessary for the actual applica-tion of IFMS has been compiled based on the architecture speci-fied in Part 1. Parts 2 and 3 have been issued as TRs.
- Part 2: Recommended business practices for set of rules- Part 3: Interoperability within a multi-application environment
In the spring of 2016, PT1701, one of project teams of CEN/TC 278, released a report titled "Standards and actions necessary to enable urban infrastructure coordination to support Urban-ITS". The report summarizes results from discussion on standards needed to support deployment of Urban ITS required for operation and management of urban areas, and includes the following eight fields that should be put high priorities:
Standardization items closely connected with public traffic include Transmodel (an existing CEN standard), IFOPT (standardization for stations of mass transportation), and activities of revision and expansion of NeTEx/SIRI.
As these items of standardization significantly affect urban traffic in our country, we must promote our opinions to be reflected in standardization while carefully watching future CEN movement.
Regarding information related to public transport, it was agreed in April 2007 that the standardization of reference model be started based on the Trans-Model established by CEN. As part of the preparation, it was agreed to prepare catalogs of public transport in member countries but this was postponed for a year due to a bud-getary constraint. Subsequently, the PWI was approved at the Bar-celona meeting in September 2009.
However, preparing catalogs of public transport information in individual countries takes a lot of time and effort, but offers limited
practical value. It was, therefore, decided to propose a compre-hensive standard including information for users of public trans-port in member countries. In addition to European Trans-Model and American PTCIP, Japanese standards will be included in it. Public transport user information Part 1 was proposed at the Jeju meeting in autumn 2010 and approved as a PWI. Standardization proceeded smoothly thereafter, and it was published as an ISO in 2014. The standardization of Parts 2 and 3 was performed in par-allel, and Part 3 was published as a TR in 2015.
Entities in IFMS
Productowner
Applicationowner
Collection&
forwarding
Application retailer
Product retailer
Customer
Customerservice
Serviceoperator
Securitymanager
Registrationagency
More specifically, traffic signals are controlled by prolonging the green light or shortening the red light based on information about the location, speed, destination and direction of travel at intersections of emergency vehi-cles so they can pass through intersections without hindrance. In addition, other vehicles and pedestrians can become aware of the presence of the emergency vehicle and avoid a potential collision. An ISO was issued in Janu-ary 2009. In 2014, it was subjected to a systematic review and approved in June in the same year.
page
22

WG 9 Integrated Transport Information, Management and Control
ActivitiesThe scope (center-to-center, centers-to-roadside) of standard-ization being worked on by WG 9 is shown in the figure. Centers refer to transport management centers. Roadside modules include signal control devices, information boards and sensors installed along roads.
Ensuring interconnectivity is one advantage of promoting the standardization of information and communication between centers as well as centers and roadside modules. It also reduces the risks involved in purchasing modules for procurers, and in development for module suppliers.
Scope of standardization
Center Center
Roadside moduleRoadside module
ISO 15784
ISO 14827
WG 9 is working on the standardization of traffic manage-ment (traffic information and control, etc.). Specifically, it is working on the systematization of information and standard-ization of communication systems between traffic manage-
ment centers, between centers and roadside modules, and between roadside modules, to enable efficient data exchange and to provide information to outside organiza-tions.
List of WG 9 work items
Communication between centers refers to communication between traffic management centers, in which information collected by one transport management center is exchanged with neighboring centers, enabling the implementation of extensive transport management. WG 9 stipulates the definition forms of messages and the protocol for the exchange of messages of communication between centers. Definition forms of messages prescribe what should be described when defining messages. This includes the name of the message, text and format (data type). The DATEX-ASN protocol has been specified for the application layer. It is based on DATEX-Net, the former European center-to-center communication standard, revised by the U.S. to incorporate the ASN.1 notation language and converted into an international standard.
This item was established as the ISO 14827
standard Part 1 and Part 2 in November 2005. Part 3, XML-base protocol for which Japan is leading a discussion, is trying to define messaging rules in a form compatible with both the European DATEXⅡ and the American NTCIP standards for communication between centers.
DIS voting is in preparation in conformity to PWI 19468 that defines communication, which Europe is promoting and is a platform indepen-dent interface based on DATEXⅡ.
Communications between Centers (ISO 14827)
Recently, in addition to vehicle detectors, road-to-vehicle communica-tions are making it possible to collect traffic information (probe data) di-rectly. Therefore, through the presentation of a reference model, Japan
made a new proposal to help develop a platform to utilize probe data for signal control. This item was approved as NP in 2016. Currently CD voting is being prepared.
Definition of data elements and data frames between roadside units and signal controllers for cooperative signal control (WD 19082)
Communication between Centers and Roadside Modules (ISO 15784)
Standardization of Communication between the Centers and Roadside Modules
GET (Data read request)SET (Data write request)
Response to GET,Response to SET Center Traffic signal
controller(example)
Traffic signalcontroller(example)
Roadside module
Variablemessage sign(for example)
(TMP method) (DATEX-ASN method)
Data delivery in response to data request
Information delivery
for information request Center
Variablemessage sign(example)
Roadside module
Communication between centers and roadside modules refers to the exchange of information between the central modules of a transport management center and modules installed along roads, as well as between different roadside modules. WG 9 plans to prescribe this communication in the form of an application profile. The application profile will specify a set of base standards for the three upper OSI layers to meet the requirements for communication between centers and roadside modules. It will also prescribe how to use the base
standards. As initial versions, the Transportation Management Protocol (TMP), from the U.S. National Transportation Communica-tion for ITS Protocol (NTCIP), was adopted for Part 2, while DATEX-ASN from the ISO 14827-2 international standard for communica-tions between transport management centers, was adopted as Part 3.
This item has been promoted under Japan's leadership. Part 1 and 3 were issued in October 2008 and Part 2 in November 2015 as ISO publications.
This item is aimed at standardization of data set for commu-nication between the transport management center and roadside modules or between roadside modules using application profile defined in ISO 15784.
It was proposed from Korea, and Part 2 (Variable message signs) was approved as NP in 2016. Along with discussion of Part 1 (Generalized field device), CD voting on Part 2 is being prepared.
Communication Interface between Centers and Roadside Modules (WD 20684)
The scope of this item is the standardizing message sets for informa-tion from vehicle detectors to generate signal control parameters. Re-cently, information measured by vehicle detectors is increasingly trans-mitted to signal controllers in real time to enhance rapid response to traffic information in signal control. In light of this situation, Korea pro-posed this item in 2006, and it was approved as an NP in 2007. This draft details two types of message sets. In the first, detectors uses
only one message set which bundles all of their data. In the other, de-tectors use separate message sets defined according to the data re-quested by the application.
Japan actively joined the standardization work, focusing on incorpo-rating the separate transmission method for data sets in the draft. This was approved as an ISO and published.
Interface Protocol and Message Set Definition between Traffic Signal Controllers and Detectors (ISO 10711)
Objects in the databaseof roadside modules
Center-initiated reading and writing of objects in roadside module database
Message exchange at the same levelbetween center and roadside modules
Message exchange at the samelevel between roadside modules
European DATEX II
Feedback to CEN specifications
American NTCIP
New center-to-center standard (ISO 14827-3)
Communications standards
CEN standards (new)
American NTCIP 2306, others
Specifications reviewed in WG9
Common communications standards
Standardization themes ISO number Contents
1 Data Interfaces between Centres for Transport Information and Control Systems - Part 1: Message Definition Requirement ISO 14827-1 Definition of message forms between centers for transport information
and control systems
2 Data Interfaces between Centres for Transport Information and Control Systems - Part 2: DATEX-ASN Application ISO 14827-2 Definition of a DATEX-ASN-based communication protocol between
centers for transport information and control systems
3Data Interfaces between Centres for Transport Information and Control Systems Part 3 : Data interfaces between centres for Intelligent Transport Systems (ITS) using XML
DIS 14827-3 Definition of an XML-based communication protocol between centers for transport information and control systems
4Data exchange involving roadside modules communication - Part 1: General principles and documentation framework of application profiles
ISO 15784-1 Principles underlying application profiles and framework for documentation regarding communication between centers and roadside modules
5 Data exchange involving roadside modules communication - Part 2: Application profile-data exchange (AP-DATEX) ISO 15784-2 Application profile based on TMP of communication between roadside
modules (NTCIP 1103)
6 Data exchange involving roadside modules communication-Part 3: Application profile-data exchange (AP-DATEX) ISO 15784-3 Application profile based on DATEX-ASN (ISO 14827) for communication
between centers and roadside modules
7 Integrated Transport Information, Management and Control - Data quality in ITS Systems TR 21707 Definition of data quality for ITS
8 Interface Protocol and Message Set Definition betweenTraffic Signal Controllers and Detectors (IPMSTSCD) NP 10711 Definition of interface and message set between vehicle detectors
and traffic signal controllers
9The use of simulation models for evalution of traffic management systems: input parameters and reporting template for simulation of traffic signal control systems
TR 16786 Specification of input parameters and report templates in evaluating signal control systems through simulation
10 Definition of data elements and data frames between roadside units and signal controllers for cooperative signal control WD 19082 The definition of a use-case, requirements and data concepts
for traffic signal control, incorporating probe data
11Data interfaces between centres for transport information and control systems — Platform independent model specifications for data exchange protocols for transport information and control systems
PWI 19468 Platform independent model specifications for data exchange protocols for transport information and control systems
12 Intelligent transport systems - Roadside modules data interfacePart 1 - Generalized field device PWI 20684-1 Definition of interface between general roadside modules and the center
13 Intelligent transport systems - Roadside modules data interfacePart 2 - Variable message signs WD 20684-2 Definition of interface between the information display board and the center
Item(s) that Japan is / has been actively working on
page
23

WG 9 Integrated Transport Information, Management and Control
ActivitiesThe scope (center-to-center, centers-to-roadside) of standard-ization being worked on by WG 9 is shown in the figure. Centers refer to transport management centers. Roadside modules include signal control devices, information boards and sensors installed along roads.
Ensuring interconnectivity is one advantage of promoting the standardization of information and communication between centers as well as centers and roadside modules. It also reduces the risks involved in purchasing modules for procurers, and in development for module suppliers.
Scope of standardization
Center Center
Roadside moduleRoadside module
ISO 15784
ISO 14827
WG 9 is working on the standardization of traffic manage-ment (traffic information and control, etc.). Specifically, it is working on the systematization of information and standard-ization of communication systems between traffic manage-
ment centers, between centers and roadside modules, and between roadside modules, to enable efficient data exchange and to provide information to outside organiza-tions.
List of WG 9 work items
Communication between centers refers to communication between traffic management centers, in which information collected by one transport management center is exchanged with neighboring centers, enabling the implementation of extensive transport management. WG 9 stipulates the definition forms of messages and the protocol for the exchange of messages of communication between centers. Definition forms of messages prescribe what should be described when defining messages. This includes the name of the message, text and format (data type). The DATEX-ASN protocol has been specified for the application layer. It is based on DATEX-Net, the former European center-to-center communication standard, revised by the U.S. to incorporate the ASN.1 notation language and converted into an international standard.
This item was established as the ISO 14827
standard Part 1 and Part 2 in November 2005. Part 3, XML-base protocol for which Japan is leading a discussion, is trying to define messaging rules in a form compatible with both the European DATEXⅡ and the American NTCIP standards for communication between centers.
DIS voting is in preparation in conformity to PWI 19468 that defines communication, which Europe is promoting and is a platform indepen-dent interface based on DATEXⅡ.
Communications between Centers (ISO 14827)
Recently, in addition to vehicle detectors, road-to-vehicle communica-tions are making it possible to collect traffic information (probe data) di-rectly. Therefore, through the presentation of a reference model, Japan
made a new proposal to help develop a platform to utilize probe data for signal control. This item was approved as NP in 2016. Currently CD voting is being prepared.
Definition of data elements and data frames between roadside units and signal controllers for cooperative signal control (WD 19082)
Communication between Centers and Roadside Modules (ISO 15784)
Standardization of Communication between the Centers and Roadside Modules
GET (Data read request)SET (Data write request)
Response to GET,Response to SET Center Traffic signal
controller(example)
Traffic signalcontroller(example)
Roadside module
Variablemessage sign(for example)
(TMP method) (DATEX-ASN method)
Data delivery in response to data request
Information delivery
for information request Center
Variablemessage sign(example)
Roadside module
Communication between centers and roadside modules refers to the exchange of information between the central modules of a transport management center and modules installed along roads, as well as between different roadside modules. WG 9 plans to prescribe this communication in the form of an application profile. The application profile will specify a set of base standards for the three upper OSI layers to meet the requirements for communication between centers and roadside modules. It will also prescribe how to use the base
standards. As initial versions, the Transportation Management Protocol (TMP), from the U.S. National Transportation Communica-tion for ITS Protocol (NTCIP), was adopted for Part 2, while DATEX-ASN from the ISO 14827-2 international standard for communica-tions between transport management centers, was adopted as Part 3.
This item has been promoted under Japan's leadership. Part 1 and 3 were issued in October 2008 and Part 2 in November 2015 as ISO publications.
This item is aimed at standardization of data set for commu-nication between the transport management center and roadside modules or between roadside modules using application profile defined in ISO 15784.
It was proposed from Korea, and Part 2 (Variable message signs) was approved as NP in 2016. Along with discussion of Part 1 (Generalized field device), CD voting on Part 2 is being prepared.
Communication Interface between Centers and Roadside Modules (WD 20684)
The scope of this item is the standardizing message sets for informa-tion from vehicle detectors to generate signal control parameters. Re-cently, information measured by vehicle detectors is increasingly trans-mitted to signal controllers in real time to enhance rapid response to traffic information in signal control. In light of this situation, Korea pro-posed this item in 2006, and it was approved as an NP in 2007. This draft details two types of message sets. In the first, detectors uses
only one message set which bundles all of their data. In the other, de-tectors use separate message sets defined according to the data re-quested by the application.
Japan actively joined the standardization work, focusing on incorpo-rating the separate transmission method for data sets in the draft. This was approved as an ISO and published.
Interface Protocol and Message Set Definition between Traffic Signal Controllers and Detectors (ISO 10711)
Objects in the databaseof roadside modules
Center-initiated reading and writing of objects in roadside module database
Message exchange at the same levelbetween center and roadside modules
Message exchange at the samelevel between roadside modules
European DATEX II
Feedback to CEN specifications
American NTCIP
New center-to-center standard (ISO 14827-3)
Communications standards
CEN standards (new)
American NTCIP 2306, others
Specifications reviewed in WG9
Common communications standards
page
24

WG 10 Traveler Information Systems
Traveler information systems, subject to standardization by WG 10, constitute a core part of ITS. This working group has work items designed to study data dictionaries and message sets to provide information to drivers through
various communication media, such as FM broadcasting, DSRC, and digital broadcasting. Recently, the Transport Protocol Experts Group (TPEG) has stepped up its UML modeling activities.
List of WG 10 work items
Graphic Data Dictionary (NP 14823)This work item involves the standardization of a graphic data dictionary (GDD) of pictograms, including road traffic signs and designs. This is intended to display pictograms corresponding to transmitted GDD codes on variable information boards or on-board devices. As pictograms vary from country to country, only the codes they represent,
rather than the actual pictograms or designs, are subject to standardization. Japan took the lead for this work item, which was published as TS in 2008. Currently, in coordina-tion with WG18 DT8.3 and WG1, progress is being made on publishing the standard as an IS, including a review of the ASN.1 code.
TTI Messages Using Broadcasting-Type Digital Media(TS 18234-1~11,NP/DTS/TS 21219-1~25,TS 24530-1 to 4)
Infrastructure information supply system
TTI information · Traffic data
· Traffic management data
· Travel condition data
· Public transport data
· Traffic sign (including graphic data)
· Public facilities (including graphic data)
· Ambient / road conditions
(including graphic data)
· Code · Name · Definition · Attribute · Pictogram
Graphic information code
TTI System Operators
TTI information · Traffic data
· Traffic management data
· Travel condition data
· Public transport data
· Traffic sign (including graphic data)
· Public facilities (including graphic data)
· Ambient / road conditions
(including graphic data)
· Code· Name· Definition· Attribute· Pictogram
Media system Users
TTI message TS 14823
+ Code+ Attribute
Look up graphic information code in TTI data and convert it to a TTI message
Look up graphic information code for the TTI message and convert it to TTI data
Characters
Pictogram
Rain,Be careful
Display
TPEG1Binary versionISO 18234 series
TPEG2UML versionISO 21219 series
TPEG1XML versionISO 24530 series
Graphic information code
TPEG is a proposal to standardize a method of providing traffic infor-mation using high-speed digital data broadcasting. TPEG standardiza-tion has progressed in the binary and XML categories, with UML cur-rently being advanced for the next-generation TPEG. Further, official liaison has been established between WG 10 and the Traffic Informa-tion Service Association (TISA), a European organization engaged in
the actual preparation of drafts for TPEG. While TISA is energetically working on those drafts, actual systems making use of TPEG are be-coming more widespread, particularly in Europe and North America. In the future, there are plans to proceed with information gathering, to cooperate with the domestic and foreign parties concerned, and to promote the presentation of comments and counter-proposals.
Standardization themes ISO number Contents
1 TTI messages via traffic message coding
ISO 14819-1 Standardization of the RDS-TMC systemISO 14819-2 Code definition of TTI messagesISO 14819-3 Location referencing methodISO 14819-6 Regulation of conditional access
2 Intelligent transport systems ---graphic data dictionary DIS 14823 Standardization of pictogram data dictionary codes
3 TTI via Transport Protocol Experts Group
TS 18234-1 Standardization of traveller information delivery services (TPEG) using digitalbroadcasting Introduction
TS 18234-2 TEPG1 binary version; Syntax, frame structureTS 18234-3 TEPG1 binary version; Services and network informationTS 18234-4 TEPG1 binary version; Road transport message applicationsTS 18234-5 TEPG1 binary version; Public transport informationTS 18234-6 TEPG1 binary version; Location referencingTS 18234-7 TEPG1 binary version; Parking lot informationTS 18234-8 TEPG1 binary version; Information on congestion and traveling timeTS 18234-9 TEPG1 binary version; Traffic event informationTS 18234-10 TEPG1 binary version; Weather informationTS 18234-11 TEPG1 binary version; Spatial referencingTS 21219-1 TEPG2 UML version; Introduction, numbering, version managementTS 21219-2 TEPG2 UML version; UML modeling ruleTS 21219-3 TEPG2 UML version; UML-binary conversion rule TS 21219-4 TEPG2 UML version; UML-XML conversion rule TS 21219-5 TEPG2 UML version; Service framework TS 21219-6 TEPG2 UML version; Message managementNP 21219-7 TPEG2 UML version, Location referencing containerTS 21219-9 TEPG2 UML version; Service network informationTS 21219-10 TEPG2 UML version; Conditioned access information TS 21219-14 TEPG2 UML version; Parking lot information TS 21219-15 TEPG2 UML version; Simplified event information DTS 21219-16 TEPG2 UML version; Fuel charge information TS 21219-18 TEPG2 UML version; Traffic flow estimation TS 21219-19 TEPG2 UML version; Weather informationNP 21219-20 TEPG2 UML version; Extended TMC location referencing method NP 21219-21 TEPG2 UML version; Geographic Location ReferencingNP 21219-22 TEPG2 UML version; Open Location ReferencingDTS 21219-23 TEPG2 UML version; Multi modal roots TS 24530-1 TEPG1 XML version; Introduction, common data typeTS 24530-2 TEPG1 XML version; Location referencingTS 24530-3 TEPG1 XML version; Road traffic messageTS 24530-4 TEPG1 XML version; Transit informationCD 21219-24 TPEG2 UML Version: Standardization of simplified encryption method for TEPGCD 21219-25 TPEG2 UML Version: Standardization of information for electric vehicle charging stations
Note: TTI: Traffic and Travel Information, RDS-TMC: Radio Data System –Traffic Message Channel Item(s) that Japan is / has been actively working on
page
25

WG 10 Traveler Information Systems
Traveler information systems, subject to standardization by WG 10, constitute a core part of ITS. This working group has work items designed to study data dictionaries and message sets to provide information to drivers through
various communication media, such as FM broadcasting, DSRC, and digital broadcasting. Recently, the Transport Protocol Experts Group (TPEG) has stepped up its UML modeling activities.
List of WG 10 work items
Graphic Data Dictionary (NP 14823)This work item involves the standardization of a graphic data dictionary (GDD) of pictograms, including road traffic signs and designs. This is intended to display pictograms corresponding to transmitted GDD codes on variable information boards or on-board devices. As pictograms vary from country to country, only the codes they represent,
rather than the actual pictograms or designs, are subject to standardization. Japan took the lead for this work item, which was published as TS in 2008. Currently, in coordina-tion with WG18 DT8.3 and WG1, progress is being made on publishing the standard as an IS, including a review of the ASN.1 code.
TTI Messages Using Broadcasting-Type Digital Media(TS 18234-1~11,NP/DTS/TS 21219-1~25,TS 24530-1 to 4)
Infrastructure information supply system
TTI information · Traffic data
· Traffic management data
· Travel condition data
· Public transport data
· Traffic sign (including graphic data)
· Public facilities (including graphic data)
· Ambient / road conditions
(including graphic data)
· Code · Name · Definition · Attribute · Pictogram
Graphic information code
TTI System Operators
TTI information · Traffic data
· Traffic management data
· Travel condition data
· Public transport data
· Traffic sign (including graphic data)
· Public facilities (including graphic data)
· Ambient / road conditions
(including graphic data)
· Code· Name· Definition· Attribute· Pictogram
Media system Users
TTI message TS 14823
+ Code+ Attribute
Look up graphic information code in TTI data and convert it to a TTI message
Look up graphic information code for the TTI message and convert it to TTI data
Characters
Pictogram
Rain,Be careful
Display
TPEG1Binary versionISO 18234 series
TPEG2UML versionISO 21219 series
TPEG1XML versionISO 24530 series
Graphic information code
TPEG is a proposal to standardize a method of providing traffic infor-mation using high-speed digital data broadcasting. TPEG standardiza-tion has progressed in the binary and XML categories, with UML cur-rently being advanced for the next-generation TPEG. Further, official liaison has been established between WG 10 and the Traffic Informa-tion Service Association (TISA), a European organization engaged in
the actual preparation of drafts for TPEG. While TISA is energetically working on those drafts, actual systems making use of TPEG are be-coming more widespread, particularly in Europe and North America. In the future, there are plans to proceed with information gathering, to cooperate with the domestic and foreign parties concerned, and to promote the presentation of comments and counter-proposals.
page
26

WG 14 Vehicle/ Roadway Warning and Control Systems
Vehicle control technology relating to driving is di-rectly linked to the driver's operation of the vehicle, and forms a central part of ITS. The purpose of this field is to reduce driver workload, enhance con-venience, and raise awareness of dangers, as well as to avoid accidents and/or mitigate damage through the use of advanced technologies. Exam-ples of systems already on the market include Adaptive Cruise Control (ACC) systems and Forward Vehicle Collision Mitigation Systems (FVCMS).
WG 14 is broad in scope as it covers standalone/ cooperative warnings and controls systems, in-cluding vehicle control, sensing of the surrounding environment, communications, and user interfaces.
List of WG 14 Work Items
Scope of WG 14
Information from surroundings
Decision
External Input
Vehicle control
Visual displays Audio devices Haptic devices
Steering (Yaw Control) Braking Driving Force Control
Camera Radar/Laser Radar Ultrasonic Sensor Wireless Communication
(V2X)
Standardization of:
Functional requirements Performance requirements Test procedures
Warning indicators
Examples
etc.
Examples Examples
etc. etc.
Side and rear vehicle
Forward vehicle
Road boundary
High speed
Control
Lane
Roadsideequipment
Low speed
Warning Control
Control Warning
Low speed,short distance
Lateral ControlLateral and longitudinal control
Medium speed,medium distance
Pedestrian collision mitigation
Cooperative
Change
Chaired by Japan, WG 14 includes many participating countries and is widely recognized as one of the most active groups in ISO/TC 204. It has already issued 13 international standards, and is currently working on 13 items.
As seen in the figure at right, after successfully es-tablishing standards for systems that provide informa-tion and emit warnings, this working group is currently dedicating itself to the standardization of systems that encompass vehicle control. It is also actively engaged in the standardization of cooperative systems that make use of communication technology.
Furthermore, through the development of certain standards, WG 14 has built collaborative relationships with such groups as ETSI*1 TC-ITS WG 1 and ISO TC22*2 SC33 WG16.
Cooperative systems
Classification of WG 14 Work Items
Standalone systems
*1 European Telecommunications Standards Institute *2 Road Vehicles
ISO 17386MALSO
ISO 22840ERBA
ISO 15622ACC
ISO 22178LSF
AWI 20035CACC
ISO 26684CIWS
ISO 11270LKAS
ISO 17361LDWS
AWI19638RBDPS
ISO 22839FVCMS
ISO 17387LCDAS
ISO 15623FVCWS
ISO 11067CSWS
PRF 18682HNS
PRF 16787APS
PWI 20900PAPS
TS 15624TIWS
DIS 19237 PDCMS
PWI 20901C-FVBWS
DTR 20545RoVAS
PWI 21217PADS
ISO 22179FSRA
PWI 20201 PALS
Publishedstandards
Under development
Vehicle control/self-driving system
Information/warning display system
Common infrastructure
Standardization themes ISO number Contents
1 Adaptive Cruise Control Systems(ACC) ISO 15622
System to keep a certain distance from the vehicle aheadSpecification of classification according to the existence of a clutch or active braking, control strategy, and driver intervention characteristicsCurrently in revision to include ISO22179 FSRA and add new contents.
2 Forward Vehicle Collision Warning Systems(FVCWS) ISO 15623
System to prevent rear-end collisions by activating a warning system whenever the vehicle in front is too close and prompting the driver to take an avoidance maneuver Specification of detection range and performance, as well as evaluation methods concerning the vehicle ahead
3 Roadside Traffic Impediment Warning Systems(TIWS) TS 15624
System that identifies obstacles in curves ahead of the vehicle through roadside sensors, and informs the driver using roadside message boardsHas been established as TS without progressing to ISO status as the infrastructure depends on unique factors that vary from one country to another
4 Maneuvering Aid for Low Speed Operation(MALSO) ISO 17386 System to inform the driver of obstacles found at the rear or corners of the vehicle when backing up and turning at low speed
Specification of classification based on detection areas, system operation conditions, and test methods
5 Lane Departure Warning Systems(LDWS) ISO 17361 System to warn the driver of an actual or possible departure from a lane due to inattention.
Specification of lane departure definition, warning conditions, and test methods
6 Lane Change Decision Aid Systems(LCDAS) ISO17387 System to inform the presence of a vehicle in the blind spot or a vehicle approaching from behind when a driver tries to change lanes
Specification of classification based on areas covered, warning conditions, and test methods
7 Low Speed Following Systems(LSF) ISO 22178 System that controls following a slow-moving vehicle in conditions such as traffic congestion
In addition to items common to FSRA, specification of control methods when the vehicle ahead changes
8 Forward Vehicle Collision MitigationSystems(FVCMS) ISO 22839
System that automatically applies emergency braking to mitigate collision damage when there is a risk of colliding with the vehicle aheadOperation concepts, system requirements, and evaluation procedures are specified
9 Extended-range Backing Aids systems(ERBA) ISO 22840 System to provide information on obstacles at the rear of the vehicle when backing up for a relatively long distance.
Specification of the scope, obstacles concerned, detection area and system operation conditions, in comparison with MALSO
10 Cooperative Intersection signal information and violation Warning Systems (CIWS) ISO 26684
System based on roadside and vehicle cooperation that displays current traffic light information on on-board equip-ment and uses it to activate a warning system when the driver is about to ignore a red lightSpecifies basic structures such as basic functions, standardization items and information contents
11 Curve Speed Warning System (CSWS) DIS 11067 System alerting the driver, using a navigation map for example, if a safe speed is exceeded as the vehicle approaches a curve
Specifies system definition and required items
12 Lane Keeping Assistance System (LKAS) ISO 11270 System that recognizes the lane ahead and automatically controls steering to help keep the vehicle in it
Specifies system definition and requirements
13 Full Speed Range Adaptive Cruise Control Systems(FSRA) ISO 22179 System to expand ACC follow functionality to stop control
Specification of the definition of the vehicle running ahead, restarting, and system operation limits14 Assisted Parking System (APS) PRF 16787 System that detects parking spaces and provides automatic steering when parking
15 External hazard detection and notifica-tion systems – Basic requirements (HNS) PRF 18682 Specification of fundamental concepts for notifications and warnings in cooperative and autonomous
systems
16 Pedestrian Detection and Collision Mitigation Systems (PDCMS) DIS 19237
System that automatically applies emergency braking to mitigate collision damage when there is a risk of colliding with a pedestrian aheadOperation concepts, performance requirements, and evaluation procedures are specified
17Report on standardization for vehicle automated driving systems (RoVAS) –Beyond driver assistance systems–
DTR 20545 A Technical Report with a broad view of automated driving functions, with items to standardize spanning many fields.
18 Road Boundary Departure Preven-tion Systems (RBDPS) AWI 19638 The system will control the vehicle’s brake and steering in order to prevent departure from the
road boundary.
19 Cooperative Adapted Cruise Control (CACC) AWI 20035 The system maintains the proper distance to the forward vehicle using V2V and V2I communica-
tion with multiple vehicles and infrastructure.
20 Partially Automated Parking System (PAPS) - Level 2 PWI 20900 The system controls both the longitudinal and lateral movement of the vehicle during parking maneuvers.
The driver remains in the car in Type 1, and remotely supervised by the drive outside the car in Type 2.
21 Cooperative Forward Vehicle Emergency Break Warning System (C-FVBWS) PWI 20901 The system warns the driver against danger caused by emergency braking of forward vehicles
on the upcoming road.
22 Partially Automated Lane Change Systems (PALS) PWI 21202 The system recognizes lane markings and conditions around the vehicle through sensors, and
changes lanes automatically upon receiving instructions or confirmation from the driver.
23 Partially Automated In-lane Driving Systems (PADS) PWI 21717 The system complexly controls the vehicle in vertical and lateral directions within the lane.
Requirements for free-hand driving are expected to be included.Item(s) that Japan is / has been actively working on
page
27

WG 14 Vehicle/ Roadway Warning and Control Systems
Vehicle control technology relating to driving is di-rectly linked to the driver's operation of the vehicle, and forms a central part of ITS. The purpose of this field is to reduce driver workload, enhance con-venience, and raise awareness of dangers, as well as to avoid accidents and/or mitigate damage through the use of advanced technologies. Exam-ples of systems already on the market include Adaptive Cruise Control (ACC) systems and Forward Vehicle Collision Mitigation Systems (FVCMS).
WG 14 is broad in scope as it covers standalone/ cooperative warnings and controls systems, in-cluding vehicle control, sensing of the surrounding environment, communications, and user interfaces.
List of WG 14 Work Items
Scope of WG 14
Information from surroundings
Decision
External Input
Vehicle control
Visual displays Audio devices Haptic devices
Steering (Yaw Control) Braking Driving Force Control
Camera Radar/Laser Radar Ultrasonic Sensor Wireless Communication
(V2X)
Standardization of:
Functional requirements Performance requirements Test procedures
Warning indicators
Examples
etc.
Examples Examples
etc. etc.
System relationship diagram
Side and rear vehicle
Forward vehicle
Road boundary
FVCMSFVCWSLSFACC
High speed
RBDPSPADSControl
LDWS
LCDASLane
TIWS
Roadsideequipment
Low speed
Warning Control
LKASControl Warning
MALSO
APS
PAPS
Low speed,short distance
Lateral ControlLateral and longitudinal control
ERBA
Medium speed,medium distance
PDCMS
Pedestrian collision mitigation
CACCCooperative
PALSChange
CIWS C-FVBWS
CSWS
Chaired by Japan, WG 14 includes many participating countries and is widely recognized as one of the most active groups in ISO/TC 204. It has already issued 13 international standards, and is currently working on 13 items.
As seen in the figure at right, after successfully es-tablishing standards for systems that provide informa-tion and emit warnings, this working group is currently dedicating itself to the standardization of systems that encompass vehicle control. It is also actively engaged in the standardization of cooperative systems that make use of communication technology.
Furthermore, through the development of certain standards, WG 14 has built collaborative relationships with such groups as ETSI*1 TC-ITS WG 1 and ISO TC22*2 SC33 WG16.
Cooperative systems
Classification of WG 14 Work Items
Standalone systems
*1 European Telecommunications Standards Institute *2 Road Vehicles
ISO 17386MALSO
ISO 22840ERBA
ISO 15622ACC
ISO 22178LSF
AWI 20035CACC
ISO 26684CIWS
ISO 11270LKAS
ISO 17361LDWS
AWI19638RBDPS
ISO 22839FVCMS
ISO 17387LCDAS
ISO 15623FVCWS
ISO 11067CSWS
PRF 18682HNS
PRF 16787APS
PWI 20900PAPS
TS 15624TIWS
DIS 19237 PDCMS
PWI 20901C-FVBWS
DTR 20545RoVAS
PWI 21217PADS
ISO 22179FSRA
PWI 20201 PALS
Publishedstandards
Under development
Vehicle control/self-driving system
Information/warning display system
Common infrastructure
page
28
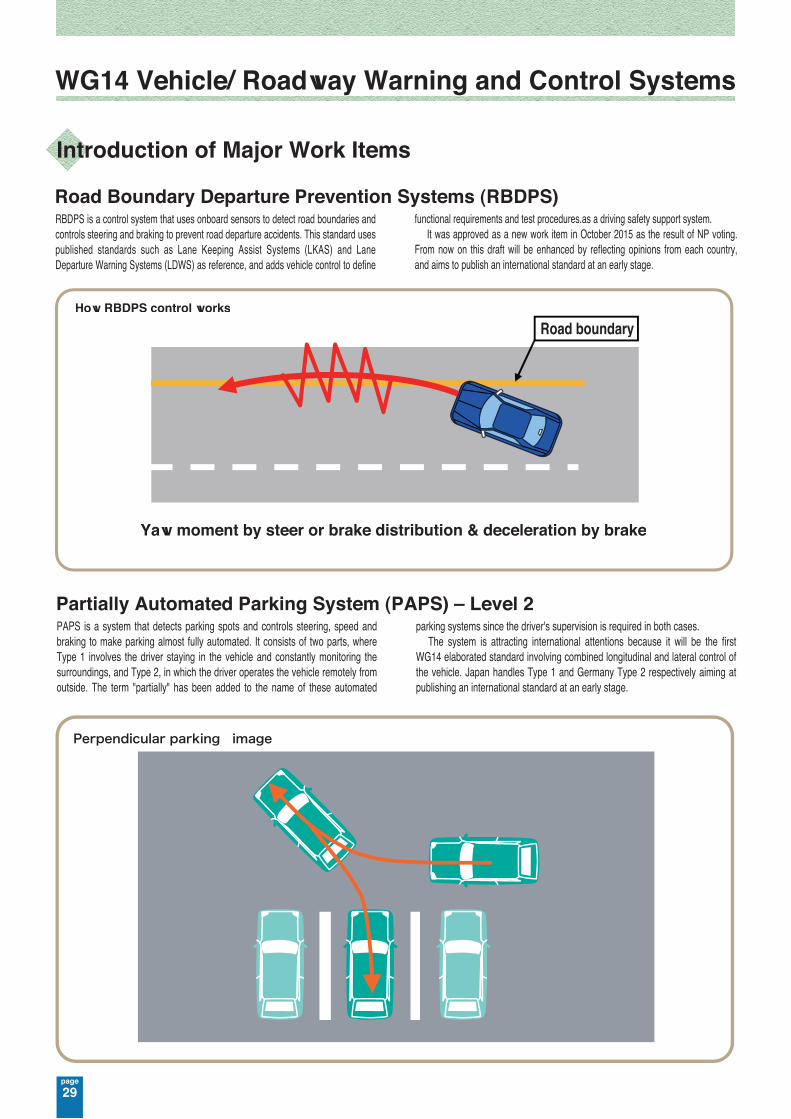
Introduction of Major Work Items
RBDPS is a control system that uses onboard sensors to detect road boundaries and controls steering and braking to prevent road departure accidents. This standard uses published standards such as Lane Keeping Assist Systems (LKAS) and Lane Departure Warning Systems (LDWS) as reference, and adds vehicle control to define
functional requirements and test procedures.as a driving safety support system.It was approved as a new work item in October 2015 as the result of NP voting.
From now on this draft will be enhanced by reflecting opinions from each country, and aims to publish an international standard at an early stage.
Road Boundary Departure Prevention Systems (RBDPS)
PAPS is a system that detects parking spots and controls steering, speed and braking to make parking almost fully automated. It consists of two parts, where Type 1 involves the driver staying in the vehicle and constantly monitoring the surroundings, and Type 2, in which the driver operates the vehicle remotely from outside. The term "partially" has been added to the name of these automated
parking systems since the driver's supervision is required in both cases.The system is attracting international attentions because it will be the first
WG14 elaborated standard involving combined longitudinal and lateral control of the vehicle. Japan handles Type 1 and Germany Type 2 respectively aiming at publishing an international standard at an early stage.
Partially Automated Parking System (PAPS) – Level 2
How RBDPS control works
Road boundary
Yaw moment by steer or brake distribution & deceleration by brake
The U.S. is leading the preparation of standards regarding its proposal for systems that shorten response time by adding vehicle-to-vehicle communication data and aim for a shorter following distance and faster target value convergence compared to the standard Adaptive Cruise Control systems that rely on on-board radars or other devices.
The scope of the proposal includes communication between three or more vehicles as well as instructions from the roadside such as recommended speed information. Ten countries, including Japan, are involved in developing the standard, reflecting the high degree of interest in this topic.
Cooperative Adaptive Cruise Control (CACC)
PADS carries out partially automated driving within the lane by detecting lane markings and the preceding vehicle via on-board sensors and other devices to control steering, acceleration, and braking of the vehicle. Germany handles
the task of this standardization. Control in the longitudinal forward/backward direction is aimed at reaching interna-tional standardization referencing ISO 15622 ACC (currently in revision) that includes automatic restart.
Partially Automated in-lane Driving Systems (PADS)
PALS decides situations where the vehicle can change the lane by detecting the existence of obstacles in the own and adjacent lanes via on-board sensors or other devices. Upon its decision, the system automatically carries out lane chang-ing maneuvers by controlling the vehicle's lateral movement
based on the driver's intention. Japan plays a leading role in handling the standard aimed at reaching international standardization of driving automation systems on highways based on supervision of the driver by combining with PADS.
Partially Automated Lane Change Systems (PALS)
WG14 Vehicle/ Roadway Warning and Control Systems
Perpendicular parking image
page
29

Introduction of Major Work Items
RBDPS is a control system that uses onboard sensors to detect road boundaries and controls steering and braking to prevent road departure accidents. This standard uses published standards such as Lane Keeping Assist Systems (LKAS) and Lane Departure Warning Systems (LDWS) as reference, and adds vehicle control to define
functional requirements and test procedures.as a driving safety support system.It was approved as a new work item in October 2015 as the result of NP voting.
From now on this draft will be enhanced by reflecting opinions from each country, and aims to publish an international standard at an early stage.
Road Boundary Departure Prevention Systems (RBDPS)
PAPS is a system that detects parking spots and controls steering, speed and braking to make parking almost fully automated. It consists of two parts, where Type 1 involves the driver staying in the vehicle and constantly monitoring the surroundings, and Type 2, in which the driver operates the vehicle remotely from outside. The term "partially" has been added to the name of these automated
parking systems since the driver's supervision is required in both cases.The system is attracting international attentions because it will be the first
WG14 elaborated standard involving combined longitudinal and lateral control of the vehicle. Japan handles Type 1 and Germany Type 2 respectively aiming at publishing an international standard at an early stage.
Partially Automated Parking System (PAPS) – Level 2
The U.S. is leading the preparation of standards regarding its proposal for systems that shorten response time by adding vehicle-to-vehicle communication data and aim for a shorter following distance and faster target value convergence compared to the standard Adaptive Cruise Control systems that rely on on-board radars or other devices.
The scope of the proposal includes communication between three or more vehicles as well as instructions from the roadside such as recommended speed information. Ten countries, including Japan, are involved in developing the standard, reflecting the high degree of interest in this topic.
Cooperative Adaptive Cruise Control (CACC)
PADS carries out partially automated driving within the lane by detecting lane markings and the preceding vehicle via on-board sensors and other devices to control steering, acceleration, and braking of the vehicle. Germany handles
the task of this standardization. Control in the longitudinal forward/backward direction is aimed at reaching interna-tional standardization referencing ISO 15622 ACC (currently in revision) that includes automatic restart.
Partially Automated in-lane Driving Systems (PADS)
PALS decides situations where the vehicle can change the lane by detecting the existence of obstacles in the own and adjacent lanes via on-board sensors or other devices. Upon its decision, the system automatically carries out lane chang-ing maneuvers by controlling the vehicle's lateral movement
based on the driver's intention. Japan plays a leading role in handling the standard aimed at reaching international standardization of driving automation systems on highways based on supervision of the driver by combining with PADS.
Partially Automated Lane Change Systems (PALS)
WG14 Vehicle/ Roadway Warning and Control Systems
Perpendicular parking image
page
30

CALM Architecture
WG 16: Communication
CALM Architecture (ISO 21217)The CALM architecture standard (ISO 21217) specifies the reference architecture for ITS (communication) stations com-monly used in CALM systems, and plays an important role in
connecting the CALM standards family. The standardization work was conducted by SWG 16.1, established as an ISO in 2010, and has been revised and a new revision was issued in 2014.
List of WG16 Work Items
WG 16 is involved in standardizing the communication sys-tems used in ITS. This working group holds discussion on the CALM systems used in ITS and the DSRC inherited
from the now disbanded WG 15 (Dedicated Short Range Communications), as well as on probe data systems.
CALM (Communications Access for Land Mobiles) system is a long range communications system using a structure called the CALM architecture. The system is based on the concept of
serving as a wide-range ITS application platform (CALM con-cept) as it allows the use of various wireless communications media and continuous communications through handover.
What is CALM?
Shows the information items necessary for data exchange relying on long-range communications in ITS applications. This information serves as meta-information (attribute information) for messages defined by the TC204 WGs, and functions as a checklist when creating systems that process those messages. It was issued as an ISO in 2006.• Selection of a communications system (Response speed, directivity,
use environment, service area, service time, band and connection cost)
• Application identifier (Message ID, message number and message transmission time)
• Address (Sender and destination)• Priority (Interruption processing and blocking control)• Security (Mutual authentication, data authentication and hiding)• Execution of application (Reasonable time, timestamp and objective
range)
Protocol Management Information (ISO 15662)
The CALM system consists of four subsystems: roadside equipment, on-board equipment, personal devices and the central system. Subsystems include an ITS station, which is indispensable to communications. The ITS station is configured in accordance with the reference architecture shown in the figure at right.
ITS stations in CALM systems feature various communications formats. The architecture standard divides them into 16 communications classes, depending on whether or not 1) multihop communications are used, 2) IPv6 or a non-IP protocol is used for the network layer, 3) handover is conducted, and 4) there is an Internet connection.
Handover, a functional feature that defines CALM, is performed not only between identical types of communication media but also between different ones. CALM ITS Station Management (ISO 24102)This was made an ISO with the scope of “managing all aspects of management entities and communication between CALM media” in 2010. When it was revised, ITS station communication functions were stipulated in detail, the document was subdivided into 6 parts and examined, and five of them were issued as ISOs by 2016.
MIB
ApplicationsRoad safety applicationsand other applications
Facilities
Security
Management
FAST Geo Routing IPv6
Access
External communication interface
Internal communication interface
5GHz band IEEE 802.11pInfra-red system2G/3G cellular phoneMillimeter waveIEEE 802.20Satellite communication etc.
Ethernet etc.
Application management
Regulatory management
Station management
Cross-layer management
Application supportInformation support
Session support
Networking & Transport
ITS Transport TCP/UDP
ITS subsystems comprising the CALM system
ITS station architecture
ITS peer-to-peer communications
Central ITS subsystem
On-board
Road side ITS subsystem
RoadsideCentral ITS communication station
In-vehicle ITS communication station
ITS-S hostITS-S host
Central system
ITS communication station internal network
ITS communication station internal network
ITS communication station internal network
Network in car
Facilities
Security
Man
agem
ent
Access
Applications
Networking &Transport
ECU
OSI Layers 1 – 7
ECU
ITS-S host
VMSRoadside
Road side ITS-S gatewayCenter ITS-S gateway
In-vehicle ITS-S gateway
Personal ITS communication station
ITS-S router
ITS-S router
ITS-S border routerITS-S border router
Personal ITS subsystem
Facilities
Security
Man
agem
ent
Access
Networking &Transport
Security
Man
agem
ent
Access
Networking &Transport
Facilities
Security
Man
agem
ent
Access
Networking &Transport
OSILayer1-7 OSI
Layers 1 – 7
Applications
Facilities
Security
Man
agem
ent
Security
Man
agem
ent
AccessAccess
Access
Networking &Transport
Networking &Transport
Network Security
Man
agem
entOSI
Layer1-3Access
Network Security
Man
agem
ent
Applications
Facilities Security
Man
agem
ent
Access
Networking &Transport
Facilities
Security
Man
agem
ent
Access
Networking &Transport
OSI Layers 1 – 7
Applications
Facilities
Security
Man
agem
ent
Access
Networking &Transport
Standardization themes ISO number Contents
1 TICS Wide Area Communication – Protocol Man-agement Information ISO15662 Defines a checklist for ITS applications in wide area communication systems between service centers and
user terminals. Japan is taking the lead in preparing a draft standard
2 CALM Architecture ISO 21217 An overview of the core aspects of CALM that specifies the CALM concept, an outline of functions and communication scenarios
3 CALM Conformance NP 18377 Conditions required for CALM Conformance (Deleted)
4 CALM ITS Station Management ISO 24102 Specifies management of all CALM management entities, and management functions for communication between different CALM media
5 CALM MSAP ISO21218 Specifies interfaces for third layer connections between different CALM communication media, and inter-faces for connecting to communication interface management entities
6 CALM 2G, CALM 3G ISO 21212ISO 21213
Standardization of interfaces for receiving ITS services via 2nd and 3rd generation mobile communications References existing mobile telephony standards and specifies a framework that complies with CALM
7 CALM IR ISO 21214 Standardization of interfaces for receiving ITS services via infrared. Japan’s optical beacon is outside of its scope
8 CALM M5 ISO 21215 Standardization of interfaces for receiving ITS services via CALM M5 5GHz band. Uses IEEE 802.11p as a base
9 CALM MM ISO 21216 Standardization of interfaces for receiving ITS services via millimeter wave
10 CALM Media Adapted Interface Layer ISO 24103 Specifies media conversion for the use of ASL (Application Sub-Layer; ARIB STD-T88 and ITU-R M.1453-2) functions with DSRC that comply with ISO 15628 (DSRC L7)
11 CALM ITS Using Public Wireless Networks – General Requirements ISO 25111 Specifies interface requirements for receiving ITS services using Mobile Broadband Wireless Access
(MBWA)
12 CALM WiMAX ISO 25112 Standardization of interfaces for receiving ITS services using WiMAX (IEEE 802.16)
13 CALM HC-SDMA ISO 25113 Standardization of interfaces for receiving ITS services using HC-SDMA (iBurst, etc.)
14 CALM Application Using Satellite ISO 29282 Use of satellite communication for ITS
15 CALM IEEE 802.20 ISO 29283 Standardization of interfaces for receiving ITS services using IEEE 802.20
16 CALM receiving public broadcast communica-tions ISO 13183 Standardization concerning management interfaces and session connections required to receive broadcast
communication in the CALM environment
17 CALM LTE ISO 17515-1 Utilization of LTE (Long Term Evolution) for ITS
18 CALM 6LowPAN DIS 19079 Standardization for conformity between 6LoWPAN, the Personal Area Network (PAN) network layer equivalent of short-range wireless networks, and CALM
19 CALM CoAP DIS 19080 Standardization for conformity between CoAP, a simplified, HTTP-like high level machine-to-machine (M2M) protocol, and CALM
20 CALM Networking Protocol for Internet Connec-tivity ISO 21210 Study of functions that achieve a seamless communication environment in CALM (handover between iden-
tical media, media switching, etc.)
21 CALM Non-IP Networking ISO 29281 Standardization of concepts, mechanisms and interfaces for non-IP communications in CALM
22 CALM Geo-routing PWI 16444 Specification of geo-routing networking functions in CALM (Deleted)
23 CALM Handover Architecture PWI 16445 Specification of the concept of handover mechanism in CALM (Deleted)
24 CALM WAVE DTS 16460 Method for interoperation between WAVE (Wireless Access in Vehicular Environments) and CALM FAST
25 CALM IPv6 Networking optimization NP 16789 Study on optimizing IPv6 in CALM and synchronizing with IETF
26 CALM IPv6 Networking Security PWI 16788 Study on authenticating devices using IPv6 in CALM and on the privacy of location information
27 CALM IPv4-IPv6 Interoperability NP 18380 Standardization to secure IPv4-IPv6 interoperability in CALM networking
28 CALM Application Management ISO 24101 Specification of mechanisms and conformance test to add, modify, or delete of ITS applications using CALM
29 CALM Multicast NP 18378 Definition of multicast application in CALM
30 Application Layer of Dedicated Short Range Communication – DSRC Layer 7 ISO 15628 Interface for roadside-to-vehicle communication equivalent to communication protocol Layer 7 (including some
functions equivalent to Layers 3 to 6)
31 Vehicle Probe Data for Wide Area Communica-tion ISO 22837 Standardization of core data elements and typical probe messages for probe data services
32 Vehicle Probe Data for Personal Data Protection in Probe Vehicle Information Service ISO 24100 Standardization of basic rules for the protection of personal information in probe data services
33 Probe Data Reporting Management TS 25114 Examination of commands for directing uplink conditions to probe vehicles
34 Event Based Probe Vehicle Data TS 29284 Standard concerning event-based probe data
35 Criteria for Privacy and Integrity protection in Probe Vehicle Information Systems AWI 16461 Readjustment of anonymity requirements and evaluation criteria in probe data systems
36 Service Architecture for Probe Vehicle System AWI 19414Standardization of a service framework to examine the definition of service areas, use of common services and centralization of services in probe data systemsWork item proposed by Japan
37 Pre-emption of ITS communication networks DTR 18317 Method for securing ITS communication networks during an emergency
38CALM Security Part:1 Framework/ Part:2 Threat Vulnerability and Risk Analysis/ Part:3 Objectives and Requirements/ Part:4 Countermeasures
AWI 13181 Standardization of security for the CALM system in the four contexts of framework, threat/vulnerability anal-ysis, requirements, and countermeasures (Deleted)
39 CALM Security consideration for lawful intercep-tion
TR 11766 Identification of the definition, architecture and mechanisms for Lawful Interception in ITS. Examination of elements (interfaces) for common use and general procedure for LI. TR (technical documents) issued
40 Data Retention for law enforcement in ITS and CALM
TR 11769Identification of data retention methods associated with lawful interception. Also, examination of data types and schemes for retentionTR (technical documents) issued
41 ITS Safety and Emergency Notifications using any Available Wireless Media – Data Registry
ISO 24978 Standardization of message data registry used for vehicle collision notification via wireless communications
Item(s) that Japan is / has been actively working on
page
31
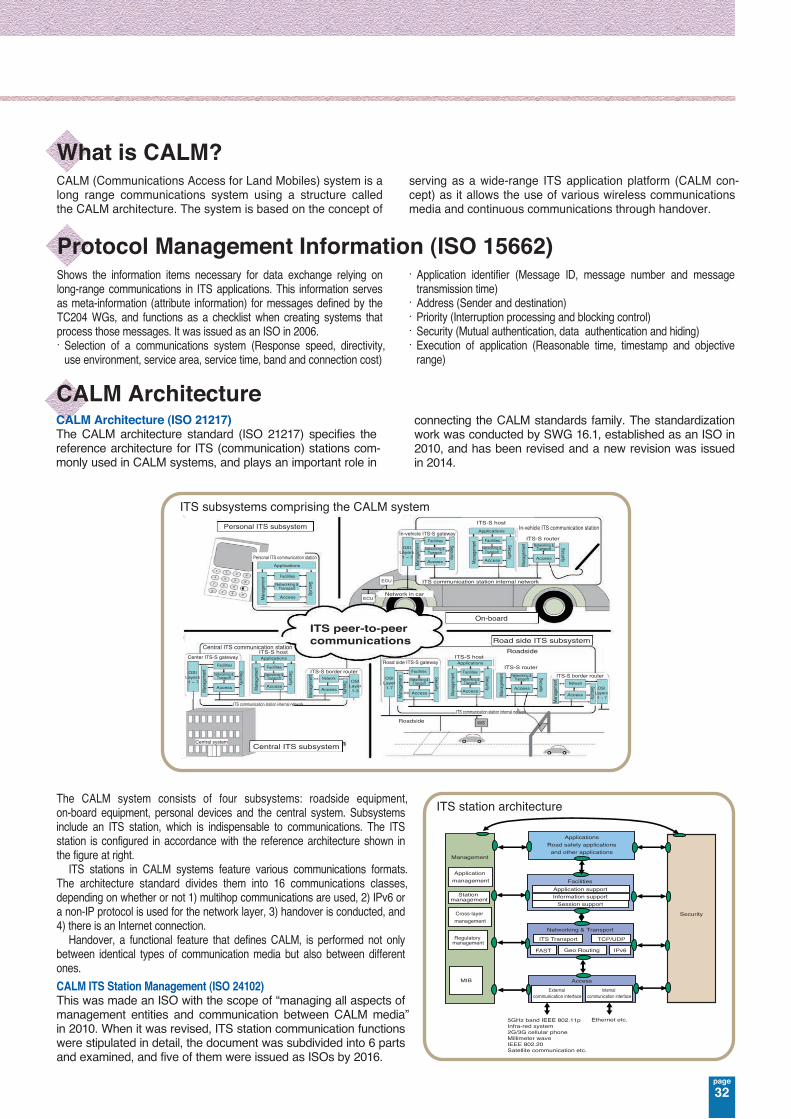
CALM Architecture
WG 16: Communication
CALM Architecture (ISO 21217)The CALM architecture standard (ISO 21217) specifies the reference architecture for ITS (communication) stations com-monly used in CALM systems, and plays an important role in
connecting the CALM standards family. The standardization work was conducted by SWG 16.1, established as an ISO in 2010, and has been revised and a new revision was issued in 2014.
List of WG16 Work Items
WG 16 is involved in standardizing the communication sys-tems used in ITS. This working group holds discussion on the CALM systems used in ITS and the DSRC inherited
from the now disbanded WG 15 (Dedicated Short Range Communications), as well as on probe data systems.
CALM (Communications Access for Land Mobiles) system is a long range communications system using a structure called the CALM architecture. The system is based on the concept of
serving as a wide-range ITS application platform (CALM con-cept) as it allows the use of various wireless communications media and continuous communications through handover.
What is CALM?
Shows the information items necessary for data exchange relying on long-range communications in ITS applications. This information serves as meta-information (attribute information) for messages defined by the TC204 WGs, and functions as a checklist when creating systems that process those messages. It was issued as an ISO in 2006.• Selection of a communications system (Response speed, directivity,
use environment, service area, service time, band and connection cost)
• Application identifier (Message ID, message number and message transmission time)
• Address (Sender and destination)• Priority (Interruption processing and blocking control)• Security (Mutual authentication, data authentication and hiding)• Execution of application (Reasonable time, timestamp and objective
range)
Protocol Management Information (ISO 15662)
The CALM system consists of four subsystems: roadside equipment, on-board equipment, personal devices and the central system. Subsystems include an ITS station, which is indispensable to communications. The ITS station is configured in accordance with the reference architecture shown in the figure at right.
ITS stations in CALM systems feature various communications formats. The architecture standard divides them into 16 communications classes, depending on whether or not 1) multihop communications are used, 2) IPv6 or a non-IP protocol is used for the network layer, 3) handover is conducted, and 4) there is an Internet connection.
Handover, a functional feature that defines CALM, is performed not only between identical types of communication media but also between different ones. CALM ITS Station Management (ISO 24102)This was made an ISO with the scope of “managing all aspects of management entities and communication between CALM media” in 2010. When it was revised, ITS station communication functions were stipulated in detail, the document was subdivided into 6 parts and examined, and five of them were issued as ISOs by 2016.
MIB
ApplicationsRoad safety applicationsand other applications
Facilities
Security
Management
FAST Geo Routing IPv6
Access
External communication interface
Internal communication interface
5GHz band IEEE 802.11pInfra-red system2G/3G cellular phoneMillimeter waveIEEE 802.20Satellite communication etc.
Ethernet etc.
Application management
Regulatory management
Station management
Cross-layer management
Application supportInformation support
Session support
Networking & Transport
ITS Transport TCP/UDP
ITS subsystems comprising the CALM system
ITS station architecture
ITS peer-to-peer communications
Central ITS subsystem
On-board
Road side ITS subsystem
RoadsideCentral ITS communication station
In-vehicle ITS communication station
ITS-S hostITS-S host
Central system
ITS communication station internal network
ITS communication station internal network
ITS communication station internal network
Network in car
Facilities
Security
Man
agem
ent
Access
Applications
Networking &Transport
ECU
OSI Layers 1 – 7
ECU
ITS-S host
VMSRoadside
Road side ITS-S gatewayCenter ITS-S gateway
In-vehicle ITS-S gateway
Personal ITS communication station
ITS-S router
ITS-S router
ITS-S border routerITS-S border router
Personal ITS subsystem
Facilities
Security
Man
agem
ent
Access
Networking &Transport
Security
Man
agem
ent
Access
Networking &Transport
Facilities
Security
Man
agem
ent
Access
Networking &Transport
OSILayer1-7 OSI
Layers 1 – 7
Applications
Facilities
Security
Man
agem
ent
Security
Man
agem
ent
AccessAccess
Access
Networking &Transport
Networking &Transport
Network Security
Man
agem
entOSI
Layer1-3Access
Network Security
Man
agem
ent
Applications
Facilities Security
Man
agem
ent
Access
Networking &Transport
Facilities
Security
Man
agem
ent
Access
Networking &Transport
OSI Layers 1 – 7
Applications
Facilities
Security
Man
agem
ent
Access
Networking &Transport
page
32

WG 16: Communication
attention. An examination of CALM MWB aimed at making use of its performance and functionality in the ITS field has been launched. In 2007, the name of the item was changed to “CALM ITS using public wireless networks” to allow a broader, more comprehensive examination of wireless systems.• CALM ITS using public wireless networks - General
requirements (ISO 25111)• ITS-CALM Mobile wireless broadband using IEEE
802.16e/ IEEE 802.16g (WiMAX) (ISO 25112)• ITS-CALM Mobile wireless broadband using HC-SDMA
(iBurst) (ISO 25113)• ITS-CALM Mobile wireless broadband using IEEE 802.20
(625k-MC mode/Wideband mode) (ISO 29283 published in 2011)
CALM Satellite (ISO 29282)Standardization work based on the European SISTER project for aimed at allowing use of satellite communica-tions in CALM. It was published as an ISO in 2011.CALM broadcast (ISO 13183)U. K. proposed standardization for an interface to use broadcast communications (DAB, DVB, etc.) with CALM. It was published as an ISO in 2012.CALM LTE (WD 17515)Standardization is being carried out to adapt LTE (E-UTRAN) 3.9th generation mobile communications to CALM. As a first step, Part 1, which concerns the standard-ization of general usage, will be published soon. In addition, the standard related to ad-hock communication of D2D(Device to D evice)as Part 2 is being discussed.
Dedicated Short Range CommunicationDSRCShort range data communication used in ITS applications such as ETC is called Dedicated Short Range Communica-tion (DSRC). The actual operating range is covered by the OSI (Open Systems Interconnection) 7-layer model com-munication protocol. Standardization of the radio communi-cations protocol corresponding to Layer 1 was conducted by ITU-R, and the recommendation, which includes Japa-nese and European protocols, was approved. ISO is focused on standardization of Layer 7.
In parallel with international standardization work, the standardization of DSRC was promoted in member coun-
tries and regions. Europe adopted the 5.8 GHz passive DSRC (CEN method) as a standard (EN), while the 5.8 GHz active DSRC standard (ARIB STD-T75) was established in Japan. There are also IR-based DSRC systems. Many coun-tries have been considering adopting DSRC, with some countries adopting their own original system. Korea and China have been working on DSRC standardization, using the Japanese system as a basis.
In Japan, the ASL (Application Sub Layer) standards and basic application interface technical specifications were set above the 7th layer.
DSRC Layer 7 (ISO 15628)In DSRC, Layers 3 to 6 are usually omitted so that vehicles moving at high speeds can communicate directly with road-side equipment within a limited communication range. The functions required by these layers are included in the application layer. Various applications are available through DSRC, and an application identifier (AID) is stipulated in the application layer. Roadside or on-board application pro-cesses specify the AID to communicate with the opposite (on-board or roadside) process via layers at or below the application level. Communication functions are performed mainly by the transfer kernel. Those functions include infor-mation encoding/decoding, division/assembly of fixed frames and multiplexing/subdivision of data from multiple applications.
WG 15 (disbanded in 2014) incorporated requests from member countries and regions, and Japan took the lead in creating the draft. The ISO standard was published in 2007. A systematic review vote subsequently conducted in 2010 resulted in a decision to make editorial revisions, which were published in 2013. WG 16 will take the task of main-taining the standard over from the former WG 15.
CALM NetworkCALM network (ISO 21210)This standard will provide functionality to achieve a seamless communi-cation environment (handover between identical media, media switch-ing, etc.) using IPv6.
In application development, a platform using the CALM environment will be provided regardless of expertise on communication media and networks. The Internet and IPv6 will be taken into consideration.
Media selection through CALM CMEA CME (CALM System Management Entity) standard for functionality that selects appropriate media by comparing the application’s media requirements with media properties and characteristics was studied. The results of the CME study will be transferred to ISO 24102 for con-formity with non IP communications.
The CALM FAST sub-system was proposed as a PWI at the Cape Town meeting in 2006, and renamed CALM non-IP communication mechanisms. The standardization plan is under examination in the context of the operating conditions and mechanisms for roadside and on-board equipment required to provide immediate and reliable roadside-to-vehicle as well as vehicle-to-vehi-cle communications using CALM.
The examination assumes non-IP communication concepts and mecha-nisms other than Internet-based network communications. In that context, it also emphasizes the inclusion of existing systems, such as the CEN and Japa-nese DSRC systems, to ensure the effective use of such systems is taken into consideration.
The framework for DSRC and the basic API is the Japanese DSRC appli-cation system described in ARIB STD-T88 (Association of Radio Industries and Businesses), DSRC basic application interface specifications (ITS Info-Communications Forum) and Joint research of next generation road service provision system (National Institute for Land and Infrastructure Management, Ministry of Land, Infrastructure, Transport and Tourism (MLIT) and 23 private companies). This CALM-related international puts Japanese technology in the global spotlight, and is expected to smoothen coordination between cou-ntries in terms of technological cooperation and the introduction and deplo-yment of technology. First issued as an ISO in April 2011, it was reissued in two parts in April 2013
CALM non-IP networking (ISO 29281)
Use of ISO 15628 (DSRC 7 layer) interface in ISO 29281
Non-IP application
Application on ISO 15628 DSRC interface
Application on ISO 15628 DSRC interface
Basic primitive application functions(Basic API)
CALM non-IP service layer
CALM non-IP network layer
Wireless communicationinterface (CI)C
ALM
man
agem
ent
ISO 15628 kernel emulator Port manager Port manager
Transport layer enhancement
CALM media
Use of application that uses ISO 15628 DSRC application layer(Europe)
Use of basic API(Japan)
Agent application LPCPELCP
ISO15628 DSRC
Transport layer non-enhancement LPP enhancement
LPP : Local port protocol LPCP : Local port control protocol ELCP: Extended link control protocol
ISO15628 DSRC
DSRC Application Layer
Layer m
anag
emen
t
Transfer kernel
Multiplexing of multiple applications
AID
Initialization kernel
BST/VST
Broadcast kernel
Broadcast pool
Division/assembly
Encoding/decoding
Application processETC Supply of
transport informationParking lot entry
and exit . . . . . . . . . .
Physical Layer
Data Link Layer
ApplicationLayer
Multiple media can use CALM, with more to be added based on future technological advances or changes in demand.
CALM MSAP (ISO 21218)Standardization work focusing on service access point speci-fications acting as interfaces between different communica-tion media, the upper layer, and the management entities in CALM. It was issued as an ISO in 2008, and later renamed (CALM Access Technology Support). Changes to the ASN.1 descriptions were added, and a revised edition was issued.CALM M5 (ISO 21215)Among existing CALM media, wireless LAN technology-based M5 is expected to play a central role. In 2004, work on IEEE 802.11p was launched as an official IEEE 802.11 task group. Using this as a base, functional parts adapting it for use with CALM were added, and an ISO was issued in 2010.CALM IR (ISO 21214)Standardization work was led by Austria and Germany, and an ISO was established in 2006. It is used to check for fraudulent practices in systems using GNSS/cellular (GNSS/CN) for heavy vehicle charges. A new revision will be published soon.CALM MM (ISO 21216)At the Chengdu meeting in 2002, an editor from Japan was elected. The physical layer was determined based on examining relevant system case studies and investigating millimeter wave communications and application character-istics. It was made an ISO in 2012. Revision has been discussed since 2015.CALM ITS using public wireless networksWireless broadband communication, which allow IP-based high-speed, high volume data process, has been gaining
CALM Media (Lower Layer)
page
33
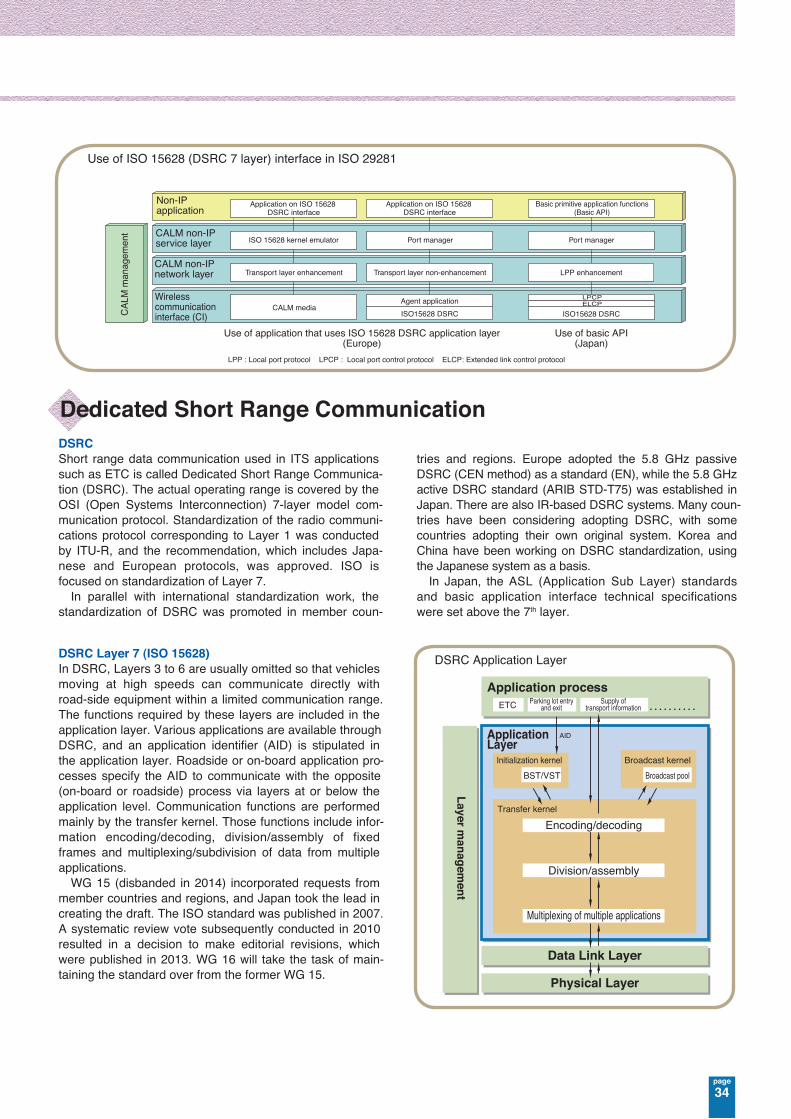
WG 16: Communication
attention. An examination of CALM MWB aimed at making use of its performance and functionality in the ITS field has been launched. In 2007, the name of the item was changed to “CALM ITS using public wireless networks” to allow a broader, more comprehensive examination of wireless systems.• CALM ITS using public wireless networks - General
requirements (ISO 25111)• ITS-CALM Mobile wireless broadband using IEEE
802.16e/ IEEE 802.16g (WiMAX) (ISO 25112)• ITS-CALM Mobile wireless broadband using HC-SDMA
(iBurst) (ISO 25113)• ITS-CALM Mobile wireless broadband using IEEE 802.20
(625k-MC mode/Wideband mode) (ISO 29283 published in 2011)
CALM Satellite (ISO 29282)Standardization work based on the European SISTER project for aimed at allowing use of satellite communica-tions in CALM. It was published as an ISO in 2011.CALM broadcast (ISO 13183)U. K. proposed standardization for an interface to use broadcast communications (DAB, DVB, etc.) with CALM. It was published as an ISO in 2012.CALM LTE (WD 17515)Standardization is being carried out to adapt LTE (E-UTRAN) 3.9th generation mobile communications to CALM. As a first step, Part 1, which concerns the standard-ization of general usage, will be published soon. In addition, the standard related to ad-hock communication of D2D(Device to D evice)as Part 2 is being discussed.
Dedicated Short Range CommunicationDSRCShort range data communication used in ITS applications such as ETC is called Dedicated Short Range Communica-tion (DSRC). The actual operating range is covered by the OSI (Open Systems Interconnection) 7-layer model com-munication protocol. Standardization of the radio communi-cations protocol corresponding to Layer 1 was conducted by ITU-R, and the recommendation, which includes Japa-nese and European protocols, was approved. ISO is focused on standardization of Layer 7.
In parallel with international standardization work, the standardization of DSRC was promoted in member coun-
tries and regions. Europe adopted the 5.8 GHz passive DSRC (CEN method) as a standard (EN), while the 5.8 GHz active DSRC standard (ARIB STD-T75) was established in Japan. There are also IR-based DSRC systems. Many coun-tries have been considering adopting DSRC, with some countries adopting their own original system. Korea and China have been working on DSRC standardization, using the Japanese system as a basis.
In Japan, the ASL (Application Sub Layer) standards and basic application interface technical specifications were set above the 7th layer.
DSRC Layer 7 (ISO 15628)In DSRC, Layers 3 to 6 are usually omitted so that vehicles moving at high speeds can communicate directly with road-side equipment within a limited communication range. The functions required by these layers are included in the application layer. Various applications are available through DSRC, and an application identifier (AID) is stipulated in the application layer. Roadside or on-board application pro-cesses specify the AID to communicate with the opposite (on-board or roadside) process via layers at or below the application level. Communication functions are performed mainly by the transfer kernel. Those functions include infor-mation encoding/decoding, division/assembly of fixed frames and multiplexing/subdivision of data from multiple applications.
WG 15 (disbanded in 2014) incorporated requests from member countries and regions, and Japan took the lead in creating the draft. The ISO standard was published in 2007. A systematic review vote subsequently conducted in 2010 resulted in a decision to make editorial revisions, which were published in 2013. WG 16 will take the task of main-taining the standard over from the former WG 15.
CALM NetworkCALM network (ISO 21210)This standard will provide functionality to achieve a seamless communi-cation environment (handover between identical media, media switch-ing, etc.) using IPv6.
In application development, a platform using the CALM environment will be provided regardless of expertise on communication media and networks. The Internet and IPv6 will be taken into consideration.
Media selection through CALM CMEA CME (CALM System Management Entity) standard for functionality that selects appropriate media by comparing the application’s media requirements with media properties and characteristics was studied. The results of the CME study will be transferred to ISO 24102 for con-formity with non IP communications.
The CALM FAST sub-system was proposed as a PWI at the Cape Town meeting in 2006, and renamed CALM non-IP communication mechanisms. The standardization plan is under examination in the context of the operating conditions and mechanisms for roadside and on-board equipment required to provide immediate and reliable roadside-to-vehicle as well as vehicle-to-vehi-cle communications using CALM.
The examination assumes non-IP communication concepts and mecha-nisms other than Internet-based network communications. In that context, it also emphasizes the inclusion of existing systems, such as the CEN and Japa-nese DSRC systems, to ensure the effective use of such systems is taken into consideration.
The framework for DSRC and the basic API is the Japanese DSRC appli-cation system described in ARIB STD-T88 (Association of Radio Industries and Businesses), DSRC basic application interface specifications (ITS Info-Communications Forum) and Joint research of next generation road service provision system (National Institute for Land and Infrastructure Management, Ministry of Land, Infrastructure, Transport and Tourism (MLIT) and 23 private companies). This CALM-related international puts Japanese technology in the global spotlight, and is expected to smoothen coordination between cou-ntries in terms of technological cooperation and the introduction and deplo-yment of technology. First issued as an ISO in April 2011, it was reissued in two parts in April 2013
CALM non-IP networking (ISO 29281)
Use of ISO 15628 (DSRC 7 layer) interface in ISO 29281
Non-IP application
Application on ISO 15628 DSRC interface
Application on ISO 15628 DSRC interface
Basic primitive application functions(Basic API)
CALM non-IP service layer
CALM non-IP network layer
Wireless communicationinterface (CI)C
ALM
man
agem
ent
ISO 15628 kernel emulator Port manager Port manager
Transport layer enhancement
CALM media
Use of application that uses ISO 15628 DSRC application layer(Europe)
Use of basic API(Japan)
Agent application LPCPELCP
ISO15628 DSRC
Transport layer non-enhancement LPP enhancement
LPP : Local port protocol LPCP : Local port control protocol ELCP: Extended link control protocol
ISO15628 DSRC
DSRC Application Layer
Layer m
anag
emen
t
Transfer kernel
Multiplexing of multiple applications
AID
Initialization kernel
BST/VST
Broadcast kernel
Broadcast pool
Division/assembly
Encoding/decoding
Application processETC Supply of
transport informationParking lot entry
and exit . . . . . . . . . .
Physical Layer
Data Link Layer
ApplicationLayer
Multiple media can use CALM, with more to be added based on future technological advances or changes in demand.
CALM MSAP (ISO 21218)Standardization work focusing on service access point speci-fications acting as interfaces between different communica-tion media, the upper layer, and the management entities in CALM. It was issued as an ISO in 2008, and later renamed (CALM Access Technology Support). Changes to the ASN.1 descriptions were added, and a revised edition was issued.CALM M5 (ISO 21215)Among existing CALM media, wireless LAN technology-based M5 is expected to play a central role. In 2004, work on IEEE 802.11p was launched as an official IEEE 802.11 task group. Using this as a base, functional parts adapting it for use with CALM were added, and an ISO was issued in 2010.CALM IR (ISO 21214)Standardization work was led by Austria and Germany, and an ISO was established in 2006. It is used to check for fraudulent practices in systems using GNSS/cellular (GNSS/CN) for heavy vehicle charges. A new revision will be published soon.CALM MM (ISO 21216)At the Chengdu meeting in 2002, an editor from Japan was elected. The physical layer was determined based on examining relevant system case studies and investigating millimeter wave communications and application character-istics. It was made an ISO in 2012. Revision has been discussed since 2015.CALM ITS using public wireless networksWireless broadband communication, which allow IP-based high-speed, high volume data process, has been gaining
CALM Media (Lower Layer)
page
34

WG 16: Communication
Scope of probe data standardization
ISO 14817 (central data registry/data dictionary)
Application domain 1
Application domain 2
Application domain 3
Reference architecture
Core data elements
(Selected) probe data elements
Probe data elements (extension for 1)
Basic data framework
Example probe message
Core data elements
An Initial setof probe data elements
Probe message
In conformity Refers to
Define based on
Define based on
UtilizeUses
Uses
Vehicle probe data for wide area communications (ISO 22837)For probe data, standardization of the items below has been estab-lished and published as an ISO in 2009.• Basic framework: Specifies the methods to define probe data ele-
ments and probe messages. Expansion and revision of the standard will be performed in accordance with this framework.
• Reference architecture: Defines the structure of the probe data system covered by this standard and the semantic structure of probe data.
• Core data element: Defines a group of probe data elements showing the time and location stamps included in all probe messages.
• Initial set of probe messages: Defines a group of typical probe messages.Event-based Probe Data (TS 29284)Event-based congestion probe data obtained after sensor value-based processing and evaluation by on-board systems was studied.Probe data reporting management (TS 25114)Reporting management is a set of instructions regarding transmission of probe data to groups of vehicles. It includes:• Instructions to start and stop transmitting probe data• Specification of the type of probe data to be transmitted• Adjustment of the threshold value to determine the necessity of trans-
missionTransmitting these instructions from the center to vehicles makes it
possible to control the unnecessary transmission of data and obtain de-tailed reports on what data is desirable to achieve effective data collec-tion. This TS was published in 2008.
Basic principles for personal data protection in probe vehicle information services (ISO 24100)The following are defined as personal data handled by probe vehicle information services: contract registration information with probe data suppliers, communication IDs, passwords for certification, communica-tion logs and personal data included in probe data itself.
To enable probe data suppliers to provide data without undue concern, the strict observance of personal data protection laws is being comple-mented by the preparation of guidelines to be followed by stakeholders and the standardization of design guidelines necessary for that purpose. The ISO was pubished in 2010.Evaluation standards for probe privacy (NP 16461)Unified standards of anonymity and security for the probe data system will be established, and the infrastructure for secure use by information suppliers will be developed. Mutual recognition and interconnection between probe information systems will be studied. The draft was approved as NP in 2014, and is currently development.Probe services architecture (NP 19414)The Japan-proposed PWI aiming to standardize the service framework by examining clear definitions as well as sharing and centralization in the service field was approved as an NP n 2013 and is currently under development.
Application management (ISO 24101-1) This item examines methods for installing applications on equip-ment featuring ITS communications functionality (roadside equip-ment or on-board devices that execute ITS applications). Stan-dardization work on mechanisms, structures and methods for adding, updating, or deleting applications is then conducted.
Methods for managing, installing, updating and uninstalling ap-plications, as well as structures for application management secu-
rity, were standardized, issued as an ISO in 2008 and approved for SR in 2011. Application Management - Conformance Test (ISO 24101-2)After the completion of ISO 24101-1, standardization efforts turned to items related to compliance tests. TTCN-3 (Testing and Test Control Notation Version 3) is used for the description of test procedures. This was established as an ISO in 2010.
Application Management
Application management
Roadsideequipment
On-boarddevice
Downloaded from an external memory source
Downloadingfrom a network
Downloaded from PC
Add, update or delete applications or data used in on-board devices.
Add, update or delete applications or data used in roadside equipment
Downloadedfrom roadside equipment
Network
Externalmemory
Lawful Interception/Data RetentionEurope has worked on standardizing mechanisms to inter-cept communications sent through such means as cellular phones, e-mail, or the Internet, as well as to track vehicles, as countermeasures against terrorism. ETSI has already es-tablished LI/DR study groups to work on standardization. Further, the ISO provided a discussion forum for internation-al cooperation that includes countries outside of Europe.
Two work items (TR 11766/TR 11769) that include infor-mation on conditions in individual regions were published as TRs.
Lawful Interception/Data Retention
CALM Security is a standard to consolidate security-related requirements for ITS wireless communication (CALM) pro-posed as a PWI at the 2008 Ottawa plenary meeting. How-
ever, work on this standard has effectively been transferred to ETSI/TC ITS and consequently removed from the list of ISO items.
CALM Security
In the wake of the Great East Japan earthquake, this SWG launched a study on securing emergency communications in the event of a disaster, particularly in terms of road traffic. Japan served as chair, and work began
with the close examination of use cases.The proposal on preemption for disaster relief (NP 18317) will cover use
case scenarios and communication requirements, and will be issued as a TR.
Preemption of ITS Communication Networks
Law Enforcement Monitoring Facility (LEMF)
Interface for information exchange
Database of communication service provider
Interface for LI/DR
Standardization of the following items started in 2005.• Emergency Call using Cellular Network (24977)• Automatic Crash Notification using Any Available Wireless Media -
Data Registry (24978)The title of item 24798 was subsequently changed to that includeITS
Safety and Emergency Notifications using any Available wireless Media -
Data Registry, as its contents cover the specifications and operation of the registry for emergency notification messages. Discussions continued under the new title and the item was published as an ISO in 2009.
As of 2015, installation of eCall in new vehicles will become mandatory in Europe.
eCall
known as probe data elements, and a set of multiple data elements is a probe message. Probe messages always contain time and location stamps.
Japan chairs this SWG, which is in charge of standard-ization for the probe data itself, standardization for the instructions on probe data reporting management, stan-dardization for the architecture of probe data, and also per-sonal data protection in probe data services. The three standards already published as ISOs or TSs are currently under systematic review.
Probe Data
A system consisting of a group of vehicles that uses medi-um-to-wide area wireless communications to collect and transmit various types of data, and of center functions that statistically process that data to acquire information on traf-fic, road, and environmental conditions, is called a probe vehicle system. Probe data refers to the data sent to cen-ters and other external systems by on-board systems. Speed and other basic data elements in probe data are
What is probe data standardization?
Probe data system
Raw sensor data Probe data
Scope of standardization
Probe vehicle system / Scope of standardization
Processed probe data Information service(Normalization) (Statistical processing) (Utilized in services)
Vehicle sensor
Vehicle
On-board system External system End user
Other information sourcesOther information
Reporting management
Application provider
page
35

WG 16: Communication
Scope of probe data standardization
ISO 14817 (central data registry/data dictionary)
Application domain 1
Application domain 2
Application domain 3
Reference architecture
Core data elements
(Selected) probe data elements
Probe data elements (extension for 1)
Basic data framework
Example probe message
Core data elements
An Initial setof probe data elements
Probe message
In conformity Refers to
Define based on
Define based on
UtilizeUses
Uses
Vehicle probe data for wide area communications (ISO 22837)For probe data, standardization of the items below has been estab-lished and published as an ISO in 2009.• Basic framework: Specifies the methods to define probe data ele-
ments and probe messages. Expansion and revision of the standard will be performed in accordance with this framework.
• Reference architecture: Defines the structure of the probe data system covered by this standard and the semantic structure of probe data.
• Core data element: Defines a group of probe data elements showing the time and location stamps included in all probe messages.
• Initial set of probe messages: Defines a group of typical probe messages.Event-based Probe Data (TS 29284)Event-based congestion probe data obtained after sensor value-based processing and evaluation by on-board systems was studied.Probe data reporting management (TS 25114)Reporting management is a set of instructions regarding transmission of probe data to groups of vehicles. It includes:• Instructions to start and stop transmitting probe data• Specification of the type of probe data to be transmitted• Adjustment of the threshold value to determine the necessity of trans-
missionTransmitting these instructions from the center to vehicles makes it
possible to control the unnecessary transmission of data and obtain de-tailed reports on what data is desirable to achieve effective data collec-tion. This TS was published in 2008.
Basic principles for personal data protection in probe vehicle information services (ISO 24100)The following are defined as personal data handled by probe vehicle information services: contract registration information with probe data suppliers, communication IDs, passwords for certification, communica-tion logs and personal data included in probe data itself.
To enable probe data suppliers to provide data without undue concern, the strict observance of personal data protection laws is being comple-mented by the preparation of guidelines to be followed by stakeholders and the standardization of design guidelines necessary for that purpose. The ISO was pubished in 2010.Evaluation standards for probe privacy (NP 16461)Unified standards of anonymity and security for the probe data system will be established, and the infrastructure for secure use by information suppliers will be developed. Mutual recognition and interconnection between probe information systems will be studied. The draft was approved as NP in 2014, and is currently development.Probe services architecture (NP 19414)The Japan-proposed PWI aiming to standardize the service framework by examining clear definitions as well as sharing and centralization in the service field was approved as an NP n 2013 and is currently under development.
Application management (ISO 24101-1) This item examines methods for installing applications on equip-ment featuring ITS communications functionality (roadside equip-ment or on-board devices that execute ITS applications). Stan-dardization work on mechanisms, structures and methods for adding, updating, or deleting applications is then conducted.
Methods for managing, installing, updating and uninstalling ap-plications, as well as structures for application management secu-
rity, were standardized, issued as an ISO in 2008 and approved for SR in 2011. Application Management - Conformance Test (ISO 24101-2)After the completion of ISO 24101-1, standardization efforts turned to items related to compliance tests. TTCN-3 (Testing and Test Control Notation Version 3) is used for the description of test procedures. This was established as an ISO in 2010.
Application Management
Application management
Roadsideequipment
On-boarddevice
Downloaded from an external memory source
Downloadingfrom a network
Downloaded from PC
Add, update or delete applications or data used in on-board devices.
Add, update or delete applications or data used in roadside equipment
Downloadedfrom roadside equipment
Network
Externalmemory
Lawful Interception/Data RetentionEurope has worked on standardizing mechanisms to inter-cept communications sent through such means as cellular phones, e-mail, or the Internet, as well as to track vehicles, as countermeasures against terrorism. ETSI has already es-tablished LI/DR study groups to work on standardization. Further, the ISO provided a discussion forum for internation-al cooperation that includes countries outside of Europe.
Two work items (TR 11766/TR 11769) that include infor-mation on conditions in individual regions were published as TRs.
Lawful Interception/Data Retention
CALM Security is a standard to consolidate security-related requirements for ITS wireless communication (CALM) pro-posed as a PWI at the 2008 Ottawa plenary meeting. How-
ever, work on this standard has effectively been transferred to ETSI/TC ITS and consequently removed from the list of ISO items.
CALM Security
In the wake of the Great East Japan earthquake, this SWG launched a study on securing emergency communications in the event of a disaster, particularly in terms of road traffic. Japan served as chair, and work began
with the close examination of use cases.The proposal on preemption for disaster relief (NP 18317) will cover use
case scenarios and communication requirements, and will be issued as a TR.
Preemption of ITS Communication Networks
Law Enforcement Monitoring Facility (LEMF)
Interface for information exchange
Database of communication service provider
Interface for LI/DR
Standardization of the following items started in 2005.• Emergency Call using Cellular Network (24977)• Automatic Crash Notification using Any Available Wireless Media -
Data Registry (24978)The title of item 24798 was subsequently changed to that includeITS
Safety and Emergency Notifications using any Available wireless Media -
Data Registry, as its contents cover the specifications and operation of the registry for emergency notification messages. Discussions continued under the new title and the item was published as an ISO in 2009.
As of 2015, installation of eCall in new vehicles will become mandatory in Europe.
eCall
known as probe data elements, and a set of multiple data elements is a probe message. Probe messages always contain time and location stamps.
Japan chairs this SWG, which is in charge of standard-ization for the probe data itself, standardization for the instructions on probe data reporting management, stan-dardization for the architecture of probe data, and also per-sonal data protection in probe data services. The three standards already published as ISOs or TSs are currently under systematic review.
Probe Data
A system consisting of a group of vehicles that uses medi-um-to-wide area wireless communications to collect and transmit various types of data, and of center functions that statistically process that data to acquire information on traf-fic, road, and environmental conditions, is called a probe vehicle system. Probe data refers to the data sent to cen-ters and other external systems by on-board systems. Speed and other basic data elements in probe data are
What is probe data standardization?
Probe data system
Raw sensor data Probe data
Scope of standardization
Probe vehicle system / Scope of standardization
Processed probe data Information service(Normalization) (Statistical processing) (Utilized in services)
Vehicle sensor
Vehicle
On-board system External system End user
Other information sourcesOther information
Reporting management
Application provider
page
36

WG 17 Nomadic Devices in ITS Systems
List of WG 17 Work Items
This workgroup is in charge of developing standards target-ing ITS services using nomadic devices such as smart phones and portable navigation devices which are rapidly
disseminating worldwide. It covers the standardization of vehicle interface, guidance protocols for safety assistance systems, and services that provide information to travelers.
Overview of standardization proposals under discussion by WG 17
13185Vehicle interface
13111Travelerinformation
17438Indoornavigation
18561Scope of tasks: standardization of ITS that makes use of nomadic devices
Green ITS
(V-ITS-SG)
10992 ITS services in vehicles13184 Advisory safety systems
Wired and wireless connection interfaces
Relationship between ISO 13185 and other vehicle information standards
Sample ISO 13185 V-ITS-SG configuration process
This is a standardization proposal for gateways to allow applications in nomadic devices to use vehicle information. Four parts are planned. Currently, Part 1 (general information and use cases) has been published as a TR, and Part 2 (protocol requirements) as an IS.
Structural requirements for which standardization had previously been planned as Part 3 were discussed at joint working (JWG) with TC22. It was put on the ballot as a new work item at the JWG, and
then denied in 2014.As the result of follow-up discussions with people involved in TC22
and TC204, the policy not to use expression "gate way" is likely to be agreed.
On the one hand, standard proposal for API of vehicle interface server/client model was additionally proposed as Part 3.
Vehicle Interface for the Provisioning and Support of ITS Services (TR 13185-1, ISO 13185-2, CD 13185-3)
Guidance protocol via personal ITS station for advisory safety systems
Indoor navigation for personal and vehicle ITS stationsThis is a standardization item on the use of mobile devices to provide guidance indoors. As indicated in the title (“for personal and vehicle ITS stations”), seamless integration of nomadic devices with on-board devices (e.g., telematics or navigation) is assumed General information and use cases are defined in Part 1.
In addition to representing indoor spaces using four layers (background, space, network, and POI*), maps incor-porating additional information such as opening hours are also being considered.
This standardization item will be dealt with in the TC in consultation with the relevant WGs.
This is a standardization proposal for the use of mobile devices to support safety on the road and in car parks. Three parts are planned. Part 1 will contain general informa-tion and use cases, Part 2 will contain protocol require-ments and Part 3 will contain the definitions of protocol con-formity test cases. To date, Part 1 was issued as a TR in
2013. Requirements and specifications for existing services and communications were integrated in Part 2. However, since only the requirements and specifications for existing services are dealt with, it was decided to study communica-tions as a separate general-purpose protocol and the result was issued as an IS in 2016.
POI
Network
Background+TextureIndoor map data
Space
Diagram of indoor map
*POI: Point of Interface
Space1 Space2 Space3
Standardization themes ISO number Contents
1The Use of nomadic and portable devices to support ITS services andmultimedia provision in vehicles
TR 10992Defines use cases to support ITS services and multimedia contents tor nomadic and mo-bile devices used in vehicles.
2Use of nomadic and portable devices to support ITS service and multime-dia provision in vehicles – Part 2: Definition and use cases for mobile ser-vice convergence
NP 10992-2Definition and use case of platforms intended for various nomadic devices and cloud uti-lizing services.
3Vehicle interface for provisioning and support of ITS servicesPart 1: General information and use case definition
TR 13185-1Part 1 of the provisioning of ITS services related to vehicle interface. Defines general in-formation and use cases for Vehicle ITS Station Gateway (V-ITS-SG)
4Vehicle interface for provisioning and support of ITS services – Part 2: Unified gateway protoco(l UGP)requirements and specification for vehicle ITS station gateway(V-ITS-SG)*interface
ISO 13185-2Part 2 of the provisioning of ITS services related to vehicle interface prposed by WG 17. Defines requirments and specification of protocols for Vehicle ITS Station Gateway (V-ITS-SG).
5Vehicle interface for provisioning and support of ITS services --Part 3: Unified gateway protoco(UGP)server and client API specification
CD 13185-3Part 3 of the provisioning of ITS services related to vehicle interface. Defines the specifi-cation of API between nomadic devices as a server to the Vehicle ITS Station Gateway (V-ITS-SG).
6Guidance protocol via personal ITS station for advisory safety systemsPart 1: General information and use case definition
TR 13184-1Part 1 of the guidance protocol for safety support systems making use of the personal ITS station. Defines general information and use cases.
7Guidance protocol via personal ITS station for advisory safety systemsPart 2: Road guidance protocol (RGP) requirements and specification
ISO 13184-2Part 2 of the guidance protocols for safety support systems making use of the personal ITS station. Defines requirements and specifications of protocols (RGP).
8Guidance protocol via personal ITS stations for advisory safety sytems: - Road quidance protocol(RGP) conformance test specification
NP 13184-3Part 3 of the guidance protocols for safety driving support systems making use of the personal ITS station. Stipulates concerning guideline of validation test suites for protocols (RGP).
9The use of personal ITS station to support ITS service provision for travel-ersPart 1: General information and use cases definition
DIS 13111-1Defines use cases for provisions of ITS services intended for travelers to nomadic and mo-bile devices.
10Use of nomadic and portable devices to support ITS service and multimedia provision in vehicles --Part 2: General requirements for data exchange between personal ITS station and other ITS stations
PWI 13111-2 Proposal related to requirements for data exchange.
11Indoor navigation for personal and vehicle ITS stationsPart1: General information and use cases definitions
ISO 17438-1Part 1 of the indoor navigation standardization jointly prepared by WGs 3, 8 and 18. Defines general information and use cases.
12Indoor navigation for personal and vehicle ITS stations --Part 4: Requirement and specification for interface between P/V and Cen-tral ITS stations
NP 17438-4Part 4 of the indoor navigation standardization jointly prepared by WGs 3, 8 and 18. De-fines the requirements and specification for interfaces between nomadic devices and ITS stations.
13The use of personal ITS station for green city transportation information and managementPart 1: General information and use case definition
CD 18561-1Defines general information and use cases for the standardization of route planning and management of green (low CO2 emissions) transportation using nomadic devices in designated areas and road sections during international events such as the FIFA World Cup or the Olympic Games.
14 A framework guideline for Green ITS (G-ITS) standards PWI 20529 Framework for using ITS to reduce CO2. Includes the concept of G-ITS, use cases, and guidelines.
15Framework for Green ITS standards- Part 2 Integrated mobile service application and use case definition
PWI 20529-2 Framework for using ITS to reduce CO2. Includes integration of mobile services and use case definition.
16Information for emergency service support via Personal ITS station- General requirements and technical definitions
NP 20530Requirements and technical definitions for sending automobile emergency information (such as crashes) via nomadic devices
17Framework architecture for plug and play(pnp) vehicles utilizing nomadic deveices
PWI 27135Proposal for framework to manage addition and deletion of automobile function by using nomadic devices.
*V-ITS-SG: Information gateway of vehicles that comply with ITS Station architecture proposed by WG17
page
37

WG 17 Nomadic Devices in ITS Systems
List of WG 17 Work Items
This workgroup is in charge of developing standards target-ing ITS services using nomadic devices such as smart phones and portable navigation devices which are rapidly
disseminating worldwide. It covers the standardization of vehicle interface, guidance protocols for safety assistance systems, and services that provide information to travelers.
Overview of standardization proposals under discussion by WG 17
13185Vehicle interface
13111Travelerinformation
17438Indoornavigation
18561Scope of tasks: standardization of ITS that makes use of nomadic devices
Green ITS
(V-ITS-SG)
10992 ITS services in vehicles13184 Advisory safety systems
Wired and wireless connection interfaces
Relationship between ISO 13185 and other vehicle information standards
Sample ISO 13185 V-ITS-SG configuration process
This is a standardization proposal for gateways to allow applications in nomadic devices to use vehicle information. Four parts are planned. Currently, Part 1 (general information and use cases) has been published as a TR, and Part 2 (protocol requirements) as an IS.
Structural requirements for which standardization had previously been planned as Part 3 were discussed at joint working (JWG) with TC22. It was put on the ballot as a new work item at the JWG, and
then denied in 2014.As the result of follow-up discussions with people involved in TC22
and TC204, the policy not to use expression "gate way" is likely to be agreed.
On the one hand, standard proposal for API of vehicle interface server/client model was additionally proposed as Part 3.
Vehicle Interface for the Provisioning and Support of ITS Services (TR 13185-1, ISO 13185-2, CD 13185-3)
Guidance protocol via personal ITS station for advisory safety systems
Indoor navigation for personal and vehicle ITS stationsThis is a standardization item on the use of mobile devices to provide guidance indoors. As indicated in the title (“for personal and vehicle ITS stations”), seamless integration of nomadic devices with on-board devices (e.g., telematics or navigation) is assumed General information and use cases are defined in Part 1.
In addition to representing indoor spaces using four layers (background, space, network, and POI*), maps incor-porating additional information such as opening hours are also being considered.
This standardization item will be dealt with in the TC in consultation with the relevant WGs.
This is a standardization proposal for the use of mobile devices to support safety on the road and in car parks. Three parts are planned. Part 1 will contain general informa-tion and use cases, Part 2 will contain protocol require-ments and Part 3 will contain the definitions of protocol con-formity test cases. To date, Part 1 was issued as a TR in
2013. Requirements and specifications for existing services and communications were integrated in Part 2. However, since only the requirements and specifications for existing services are dealt with, it was decided to study communica-tions as a separate general-purpose protocol and the result was issued as an IS in 2016.
POI
Network
Background+TextureIndoor map data
Space
Diagram of indoor map
*POI: Point of Interface
Space1 Space2 Space3
page
38

WG 18 Cooperative Systems
While standardization of the system for acquiring information from various sensors built in the vehicle based on connection between on-board ITS devices and vehicle information system (CAN BUS) can be regarded as an issue since the launch of ITS standardization, it has yet to be realized due to difference in thoughts between stakeholders.
Finally at the October 2015 Potsdam conference, it has come to conclusion that the study would be launched in the form of limiting the use only in applications allowing for just very short delay, such as collision prevention application based on communication between
vehicles."Security service of ITS station for establishing secure sessions and
rapid authentication"(21177)and "Commnication profile for secure connection between ITS stations and vehicles"(21185)are standards for ensuring security of communication between vehicles and ITS stations, and "Vehicle information data dictionary for cooperative ITS application"(21185)is a standard of the data dictionary used in commu-nication.
Secure connections between in-vehicle ITS communication station and vehicle information systems
Most of cooperative ITS applications handle information on vehicle position, speed, and time. Also, in a collision prevention application based on communication between vehicles, for instance, the accuracy (error) of information each vehicle possesses must be appropriately managed.
"Function for position, speed, and time information of ITS stations"(21186) is a standard for centrally handling location, speed and time information as a function of ITS station facility layer. Discussion of the standard was launched in the October 2015 Potsdam conference.
Position, speed, and time information function of ITS communication station
As stated earlier, in the context of the search for use cases not yet stan-dardized as cooperative ITS applications and the compilation of require-ments, Japan is taking the lead in bringing up the new candidates for standardization.
It was decided to adopt the viewpoint of road operator, who are both developers and users of cooperative ITS, and work is proceeding in co-ordination with the World Road Association (PIARC). Specifically, the
details of WG 18 activities are presented to members of the PIARC ITS study team (TC 2.1: road network operations) through outreach activi-ties. In addition, to discover the next candidates for standardization, gap/overlap analysis is being applied to information on programs relat-ed to cooperative ITS that are being studied by PIARC or road adminis-trators in various countries.
Identifying and studying candidate work items
In October 2009, Mandate M/453 on the standardization of cooperative ITS was ordered by the European Commission (EC), and standardization task was assigned to ETSI TC ITS and CEN/TC 278.
CEN/TC278 then established WG16 as the group in
charge of cooperative ITS, with standardization being per-formed in cooperation with ISO/TC 204. According to the resolution adopted at the September 2009 Barcelona ple-nary meeting, WG 18 was established in ISO/TC 204 as a counterpart to the CEN work group.
Cooperative ITS integrates vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I) and infra-structure-to-infrastructure
(I2I) communications, and simultaneously supports exten-sive ITS services via the communications system.
Background behind the establishment of WG 18
WG 18 not only conducts its own standardization work but also coordinates related work items in other WGs with due respect for their activities to date.
At the Vienna meeting in March 2011, WG 18 set up SWG1 to handle overall coordination and DTs (Drafting Teams) to separately discuss individual items. Thereby the framework was established to specifically discuss scope and items of standardization.
Further, European road operators and corporations called for the early standardization of infrastructure-related applica-tions with cooperative ITS, such as safety applications for in-
tersections as well as the provision of probe data and road traffic information. Consequently, at the Delft conference in February 2013, activities to develop standards were additional-ly launched.
At the same time, in response to the immediate outcome(Release 1 )released from European Commission Mandate
M/453, SWG2 was set up to identify and study work items that require further standardization primarily from the perspec-tive of road managers, and has launched activities in which Japan takes leading role.
Roles and activities of WG18
The Japanese WG 18 domestic committee was established in August 2010 under the auspices of the Highway Industry Development Organization (HIDO) and, in coordination with existing domestic committees, began its activities in October of the same year.
In particular, systems already scheduled for deployment in
Japan are closely related to the infrastructure-related applica-tions. Therefore, Japan will present necessary opinions and make appropriate international contributions.
As previously stated, Japan is leading SWG 2 which is re-sponsible for identifying and studying the next series of work items.
Japanese Framework
List of WG18 Work Items
Local Dynamic Maps (LDM)Local Dynamic Maps (LDM) are databases being studied in Europe for use in ITS, which feature superimposed location referencing and dy-namic information. In ITS station architecture, they are a function of the facility layer, and are mainly used for safety applications. Their fun-damental structure consists of temporary information concerning con-gestion, traffic obstacles, the weather, and other factors, with informa-tion on dynamic objects, targets and objectives (including current signals) acquired mainly through communication with ITS stations and sequentially layered on the location referencing information. The State of the art of Local Dynamic Maps concepts (17424) report, which con-solidates the various LDM concepts that have mainly been studied by various European development organizations, was issued as a TR. Also, the Definition of a global concept for Local Dynamic Maps (18750) examines definitions of completed concepts based on the above TR, and was published as a TS. For the time being, WG 18 is only study-ing LDM concept definitions. Concrete database structures, APIs, and other implementation specifications remain items to study at a future date. In-Vehicle SignageIn-vehicle signage, which displays diverse road traffic information in ve-hicles in line with road traffic operator intent, is a system similar to the VICS and ITS spot services used in Japan to provide simplified graph-ic information.
Initially called Embedded VMS based on the original concept of re-placing and supplementing roadside variable message signs (VMS), it has been renamed in-vehicle signage as its scope expanded to static signs presenting regulations and guidance. The standard of data ex-change for displaying external data related to road traffic in vehicle (17424) compiles requirements and requests for functional require-ments and communications messages. The result is expected to be
issued as a TS by the end of 2016. In addition, new work items that incorporate the outcome of ad-
vance cooperative ITS deployment plans in the EU, such as SCOOP@F led by France or ITS Corridor led by the Netherlands, Ger-many, and Austria are scheduled to start in spring 2016.
As previously stated, Japan, which provided similar services since the 1990s, has presented various opinions based on its expertise and is working toward international harmonization.SPaT, MAP, SRM and SSMUsing SPaT, MAP, SRM and SSM signal control to develop safety/environment applications for areas around intersections re-quires sending information on current signal conditions and related in-formation on areas around intersections. This work item specifies topol-ogy information on the locations of stop lines, the configuration of intersections, and other factors, as well as communications (messages) for priority control information concerning public transport and emergency vehicles (SRM and SSM). In April 2013, work on the Using V2I and I2V communications for applications related to signal-ized intersections (19091) item began.The result is expected to be issued as a TS by the end of 2016.In-vehicle InformationIn-vehicle information (IVI) is a concept that expands and encompass-es In-vehicle Signage (17425) and Contextual Speeds (17426). Even though it stipulates systems to transmit road sign and speed limit infor-mation from the roadside to the vehicle, this work item only covers the message structure. Specifics of applications will be stipulated in their respective standards. Work of this items has been launched in April 2013 as "Dictionary of in-vehicle information (IVI) data structures"
(19031), then is currently proceed aimed at publishing the standard as a TS by the end of 2016.
Outline and status of major study items
Standardization themes ISO number Contents1 Classification and management of ITS applications in a global context TS 17419 Standardization of ITS application classes and management
2 ITS application requirements for automatic selection of communication interfaces TS 17423Standardization of requirements when applications select communication in-terface
3 State of the art of Local Dynamic Maps concepts FDIS/TR 17424 Report collating existing Local Dynamic Map (LDM) concepts4 Definition of a global concept for Local Dynamic Maps CD/TS 18750 Stipulations for defining Local Dynamic Map (LDM) concepts
5Roles and responsibilities in the context of cooperative ITS based on architecture(s) for co-operative systems
TS 17427-1 Standardization of roles and responsibilities for agents in cooperative ITS
6 TR’s re to C-ITS deployment support 17427-2 13Report (TR) on support for actual dissemination based on the roles and re-sponsibilities of the entities stipulated in 17427-1
7Data exchange specification for in-vehicle presentation of external road and traffic related data
NP 17425Standardization of system for providing data about road traffic on onboard equipment using same format as roadside VMS
8 Generic ITS station facilities for the transfer of information between ITS stations NP 17429Stipulation of shared functionality for the transfer and processing of informa-tion between ITS stations
9 Test Specifications TS 17429NP TS
20594-1〜3Stipulations concerning validation of test suites based on 17429
10 Contextual speeds CD 17426Specification of systems for presenting speed limits and recommendations based on factors such as location, weather, and traffic conditions
11 Test Specifications TS 17426PWI TS 21189-1
Stipulations concerning validation of test suites based on TS17426
12Using V2I and I2V communications for Applications Related to Signalized Intersections (SPaT, MAP, SRM, SSM)
WD 19091Definition of V2I/I2V messages and related data structures and data ele-ments for applications related to signalized intersections
13 Test Specifications TS 19091NP TS
20597-1〜3Stipulations concerning validation of test suites based on TS19091
14 Representative probe data use cases and related gaps in existing probe data standards 20025Report (TR) that collates use cases concerning messages for probe data and its management, and also makes deficiencies in existing standards clear
15 Using I2V communications for applications related to in-vehicle information (IVI) TS 19321Stipulations concerning data structure dictionaries for applications providing in-vehicle information
16 Test Specifications TS 19321NP TS
20598-1〜3Stipulations concerning validation of test suites based on TS19321
17 Test Architecture 20026Stipulations concerning the architecture of validation test suites for coopera-tive systems
18 Guidelines on the use of C-ITS standards for hybrid communications AWI TS 21176 Guidelines to use mixed multiple communication media with cooperative ITS
19ITS-Station security services for secure session establishment and rapid authentication AWI TS 21177
Stipulations concerning required items for secure connections between in-vehicle ITS communication station and vehicle information systems
Data dictionary of vehicle-based information for C-ITS applications AWI TS 21184Communication profiles for secure connection between ITS-Station and vehicle AWI TS 21185
20 Position, Velocity and Time functionality in the ITS Station NP TR 21186Stipulations concerning the architecture of validation test suites for cooperative systems
page
39

WG 18 Cooperative Systems
While standardization of the system for acquiring information from various sensors built in the vehicle based on connection between on-board ITS devices and vehicle information system (CAN BUS) can be regarded as an issue since the launch of ITS standardization, it has yet to be realized due to difference in thoughts between stakeholders.
Finally at the October 2015 Potsdam conference, it has come to conclusion that the study would be launched in the form of limiting the use only in applications allowing for just very short delay, such as collision prevention application based on communication between
vehicles."Security service of ITS station for establishing secure sessions and
rapid authentication"(21177)and "Commnication profile for secure connection between ITS stations and vehicles"(21185)are standards for ensuring security of communication between vehicles and ITS stations, and "Vehicle information data dictionary for cooperative ITS application"(21185)is a standard of the data dictionary used in commu-nication.
Secure connections between in-vehicle ITS communication station and vehicle information systems
Most of cooperative ITS applications handle information on vehicle position, speed, and time. Also, in a collision prevention application based on communication between vehicles, for instance, the accuracy (error) of information each vehicle possesses must be appropriately managed.
"Function for position, speed, and time information of ITS stations"(21186) is a standard for centrally handling location, speed and time information as a function of ITS station facility layer. Discussion of the standard was launched in the October 2015 Potsdam conference.
Position, speed, and time information function of ITS communication station
As stated earlier, in the context of the search for use cases not yet stan-dardized as cooperative ITS applications and the compilation of require-ments, Japan is taking the lead in bringing up the new candidates for standardization.
It was decided to adopt the viewpoint of road operator, who are both developers and users of cooperative ITS, and work is proceeding in co-ordination with the World Road Association (PIARC). Specifically, the
details of WG 18 activities are presented to members of the PIARC ITS study team (TC 2.1: road network operations) through outreach activi-ties. In addition, to discover the next candidates for standardization, gap/overlap analysis is being applied to information on programs relat-ed to cooperative ITS that are being studied by PIARC or road adminis-trators in various countries.
Identifying and studying candidate work items
In October 2009, Mandate M/453 on the standardization of cooperative ITS was ordered by the European Commission (EC), and standardization task was assigned to ETSI TC ITS and CEN/TC 278.
CEN/TC278 then established WG16 as the group in
charge of cooperative ITS, with standardization being per-formed in cooperation with ISO/TC 204. According to the resolution adopted at the September 2009 Barcelona ple-nary meeting, WG 18 was established in ISO/TC 204 as a counterpart to the CEN work group.
Cooperative ITS integrates vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I) and infra-structure-to-infrastructure
(I2I) communications, and simultaneously supports exten-sive ITS services via the communications system.
Background behind the establishment of WG 18
WG 18 not only conducts its own standardization work but also coordinates related work items in other WGs with due respect for their activities to date.
At the Vienna meeting in March 2011, WG 18 set up SWG1 to handle overall coordination and DTs (Drafting Teams) to separately discuss individual items. Thereby the framework was established to specifically discuss scope and items of standardization.
Further, European road operators and corporations called for the early standardization of infrastructure-related applica-tions with cooperative ITS, such as safety applications for in-
tersections as well as the provision of probe data and road traffic information. Consequently, at the Delft conference in February 2013, activities to develop standards were additional-ly launched.
At the same time, in response to the immediate outcome(Release 1 )released from European Commission Mandate
M/453, SWG2 was set up to identify and study work items that require further standardization primarily from the perspec-tive of road managers, and has launched activities in which Japan takes leading role.
Roles and activities of WG18
The Japanese WG 18 domestic committee was established in August 2010 under the auspices of the Highway Industry Development Organization (HIDO) and, in coordination with existing domestic committees, began its activities in October of the same year.
In particular, systems already scheduled for deployment in
Japan are closely related to the infrastructure-related applica-tions. Therefore, Japan will present necessary opinions and make appropriate international contributions.
As previously stated, Japan is leading SWG 2 which is re-sponsible for identifying and studying the next series of work items.
Japanese Framework
List of WG18 Work Items
Local Dynamic Maps (LDM)Local Dynamic Maps (LDM) are databases being studied in Europe for use in ITS, which feature superimposed location referencing and dy-namic information. In ITS station architecture, they are a function of the facility layer, and are mainly used for safety applications. Their fun-damental structure consists of temporary information concerning con-gestion, traffic obstacles, the weather, and other factors, with informa-tion on dynamic objects, targets and objectives (including current signals) acquired mainly through communication with ITS stations and sequentially layered on the location referencing information. The State of the art of Local Dynamic Maps concepts (17424) report, which con-solidates the various LDM concepts that have mainly been studied by various European development organizations, was issued as a TR. Also, the Definition of a global concept for Local Dynamic Maps (18750) examines definitions of completed concepts based on the above TR, and was published as a TS. For the time being, WG 18 is only study-ing LDM concept definitions. Concrete database structures, APIs, and other implementation specifications remain items to study at a future date. In-Vehicle SignageIn-vehicle signage, which displays diverse road traffic information in ve-hicles in line with road traffic operator intent, is a system similar to the VICS and ITS spot services used in Japan to provide simplified graph-ic information.
Initially called Embedded VMS based on the original concept of re-placing and supplementing roadside variable message signs (VMS), it has been renamed in-vehicle signage as its scope expanded to static signs presenting regulations and guidance. The standard of data ex-change for displaying external data related to road traffic in vehicle (17424) compiles requirements and requests for functional require-ments and communications messages. The result is expected to be
issued as a TS by the end of 2016. In addition, new work items that incorporate the outcome of ad-
vance cooperative ITS deployment plans in the EU, such as SCOOP@F led by France or ITS Corridor led by the Netherlands, Ger-many, and Austria are scheduled to start in spring 2016.
As previously stated, Japan, which provided similar services since the 1990s, has presented various opinions based on its expertise and is working toward international harmonization.SPaT, MAP, SRM and SSMUsing SPaT, MAP, SRM and SSM signal control to develop safety/environment applications for areas around intersections re-quires sending information on current signal conditions and related in-formation on areas around intersections. This work item specifies topol-ogy information on the locations of stop lines, the configuration of intersections, and other factors, as well as communications (messages) for priority control information concerning public transport and emergency vehicles (SRM and SSM). In April 2013, work on the Using V2I and I2V communications for applications related to signal-ized intersections (19091) item began.The result is expected to be issued as a TS by the end of 2016.In-vehicle InformationIn-vehicle information (IVI) is a concept that expands and encompass-es In-vehicle Signage (17425) and Contextual Speeds (17426). Even though it stipulates systems to transmit road sign and speed limit infor-mation from the roadside to the vehicle, this work item only covers the message structure. Specifics of applications will be stipulated in their respective standards. Work of this items has been launched in April 2013 as "Dictionary of in-vehicle information (IVI) data structures"
(19031), then is currently proceed aimed at publishing the standard as a TS by the end of 2016.
Outline and status of major study items
page
40

Measurement of Visual BehaviorThis standard determines methods to measure the time spent gazing at information devices. However manually sampling the gaze duration from eye movement videos is prone to increase the variance of results depending on the analysts. Improvements to resolve the issue are being made through the detailed standardization of manual proce-dures and the introduction of technologies to automate the process.
HMI for Automated DrivingAmidst tough competition between countries and compa-nies for the development of automated driving systems, issues such as how to control transfer between the driver and system, and maintaining the driver's situation aware-ness must be addressed. The terminology to be used in measuring driver performance and condition in relation to those issues is currently being defined. Activities in this field may expand to the standardization of HMI in the near future.
Main work items under discussion
System Human Interface Standardization Activities in Europe
ITS Standardization at CEN/TC 278CEN (European Standards Committee)/ TC 278 is a Europe-an technical committee #278 responsible for ITS which was established in 1992 before ISO/TC 204 creation. Previously known as Road Transport and Traffic Telematics (RTTT), it was renamed as ITS at the TC 278 plenary meeting in March 2013. At CEN, standards are usually prepared according to the following procedure. They are first formalized as technical specifications (TS), and then followed by a review before final-ly either becoming a European standard (EN) or being can-celled. Technical standards developed in European standard organizations such as CEN, are in principle, optional. Howev-er, the binding power of Directive 98/34/EC - Procedures based on the New Approach, technical standards developed under the standardization directive become virtually mandato-ry European standards.
European EN standards differ from ISOs in that: (1) once detailed work on an EN has started, similar standardization
work in individual European countries ceases; (2) once an EN is established, any standard in individual European countries no longer compatible with the new one is abolished; and (3) EN is mandatory in public procurement. At present, CEN/TC 278 has 14 active Working Groups (WG) which all have a close relation with the WGs in TC 204. A standardization man-date was issued in October (Mandate 2009/453/EC). CEN/ TC 278 and ETSI have cooperated to develop standards and presented Release 1 in July 2013. In addition, CID(Commission Implementing Decision)for promoting standard-ization of Urban ITS was issued in February 2016, and a new WG17 was created within CEN/TC278 in April. The CEN proj-ect team PT1701 on Urban ITSmet in Brussels in February 2016. Members from ISO/TC204 was invited to the meeting. An interim study report on standardization work items pro-posed was disclosed in January 2016.
Outline of activitiesThe amendment of the existing standards to correspond with new technologies and studies on new standards is being pro-moted. The items under discussion are measurement of visual behaviors, which have a broad range of applications
and significant impact as methods of evaluating onboard equipment in conjunction with visual behaviors. In addition, discussion of HMI in automated driving has also begun.
The deployment of ITS may give cause to concerns that driver workload will increase greatly with the rising number of devices that need to be operated or serve to provide infor-mation. This WG is working on standardizing human-ma-chine interfaces (HMI) to enhance safety by keeping opera-tions simple and minimizing workload. In addition, it is developing standardization scenarios and promoting re-search related to future HMIs.
When TC 204 was founded, WG 13 (Human Factors and MMI) was set up to take charge of standardization of HMI for overall ITS systems, including infrastructure. However, interna-
tional standardization activities were integrated into TC 22 (road vehicles)/SC 13 (Ergonomics)/WG 8 (TICS on-board MMI) in 1998. After that, the WG was renamed to TC 22/SC 39 (Ergonomics)/ WG 8 as part of the restructuration of TC 22 in 2015.
This subcommittee meets with the same members as the corresponding TC 22 Human Interface Subcommittee. This means the WG implements activities as TC 22 when han-dling HMI for on-board ITS units, and also implements activi-ties as TC 204 when dealing with HMI for overall ITS sys-tems, including infrastructure.
Background and objective
List of TC 22/SC 39/WG 8 Work Items Working Group Lead Country
WG 1 Electronic Fee Collection(EFC) Sweden WG 5
WG 2 Freight, Logistics and Commercial Vehicle Operations United Kingdom WG 7
WG 3 Public Transport France WG 8
WG 4 Traffic and Traveler Information United Kingdom WG 10
WG 5 Traffic Control Systems United Kingdom WG 9
WG 7 ITS Spatial Data Germany WG 3
WG 8 Road Traffic Data Netherlands WG 3
WG 9 Dedicated Short Range Communications (DSRC) Germany WG 15
WG 10 Human-Machine Interfacing Germany (TC 22/SC 13/WG 8)WG 12 Automatic Vehicle and Equipment Identification (AVI/AEI) Norway WG 4
WG 13 Architecture and Terminology United Kingdom WG 1
WG 14 Recovery of Stolen Vehicles United Kingdom
WG 15 eSafety/eCall United Kingdom
WG 16 Cooperative ITS Germany WG 18
WG 17 Urban ITS Norway (Intelligent mobility ad-hoc)
List of CEN/TC 278 working groups
CEN/TC 278 Working Group Corresponding ISO/TC 204 Working Group
Vienna AgreementThe Vienna Agreement concluded in 1990 is to foster close coopera-tion between CEN (European Committee for Standardization) and ISO standardization activities. The Vienna Agreement grants CEN standardization activities a special position in the development of ISO standards giving the impression of unfairness for countries out-side of Europe. Conversely, it is playing the role preventing an influ-ence of European standardization activities from concluding within Europe giving disadvantages for non-European countries. The Vienna Agreement defines cooperation between both organizations on three points: 1) Document exchange between ISO/TC and CEN/TC: Document-
ed draft standards prepared by the committees of each group shall be exchanged through their respective coordinating coun-tries.
2) Dispatching mutual representatives to committees and WGs: Per agreement between the ISO/TC and CEN/TC committees, up to 4 representatives may join meetings of the other party’s commit-tee. In such instances, non-CEN national members are given pri-ority as a representative.
-1 Formal appointment by the ISO/CEN committee is required. -2 Representatives are expected to have interest to the subject and
act aggressively at the meeting. The representative does not have the right to vote.
3) Parallel inquiries in developing standards: The ISO has priority in leading work items when the NP requirement is met. CEN lead is only exceptionally permitted with the approval of a simple majority of P-member of non-CEN nations in the ISO committee. However, ISO lead is required for later revisions to standards developed under CEN lead. Exceptions are only made upon approval by a simple majority of P-member of non-CEN nations. When the de-velopment of the standard is led by CEN, it is important to partici-pate in CEN meetings, in accordance with the Vienna Agreement, development stage since voting in ISO/TC is to be made in paral-lel at the DIS phase.
4) Others: The ISO/CS (Central Secretary), CEN, and the NSB (National Standardization Body) are responsible for the proper im-plementation of the Vienna Agreement.
Reference 1: The Agreement on Technical Co-operation between ISO and
CEN (Vienna Agreement)
http://isotc.iso.org/livelink/livelink?func=ll&objId=4230458&objA
ction=browse&sort=subtype
Reference 2: Guidelines for the implementation of the Agreement on Techni-
cal Co-operation between ISO and CEN (Vienna Agreement),
Sixth Edition dated January 2014. English and Japanese paral-
lel translation issued by Japanese Standards Association, JSA
Standardization themes ISO number Contents
1 Dialogue Management ISO 15005 Human engineering principles and conformity standards regarding dialog management of on-board ITS units while driving
2 Auditory Information ISO 15006 Recommendation items and measuring conditions concerning ITS information supply through hearing
3 Measurement of Visual Behavior NP 15007 Enhancement of accuracy of analysis and measuring methods for visual behavior of drivers (manual and automated methods)
4 Visual Presentation ISO 15008 Requirements and evaluation of ITS visual information display, including variable message boards
5 Suitability ISO 17287 Assessment of suitability during operation of ITS system6 Priority TS 16951 Methods to determine priority when providing multiple data, including ITS, to drivers
7 Visual Distraction ISO 16673 Method to bench-top measure the load of operation requiring visual recognition; IS pub-lished on April 1, 2007
8 Warning Systems TR 16352 Compilation of preceding study cases on how to give warnings; issued as a TR
9 Warning Integration TR 12204 Provision of design guidelines so that drivers can recognize multiple warnings even if they are almost simultaneous
10 Simulated Lane Change Test ISO 26022 Method to evaluate the distraction caused by on-board equipment operation through mak-ing lane changes in a PC simulation
11 Calibration Task TR 14198 Standard tasks for determining whether measurement test conditions are calibrated cor-rectly
12 Detection Response Task DIS 17488 Method for evaluating cognitive workload of secondary tasks
13 HMI for Automated Driving – Terms and definitions for measurement of the driver’s performance and condition during automated driving.
Item(s) that Japan is / has been actively working on
page
41
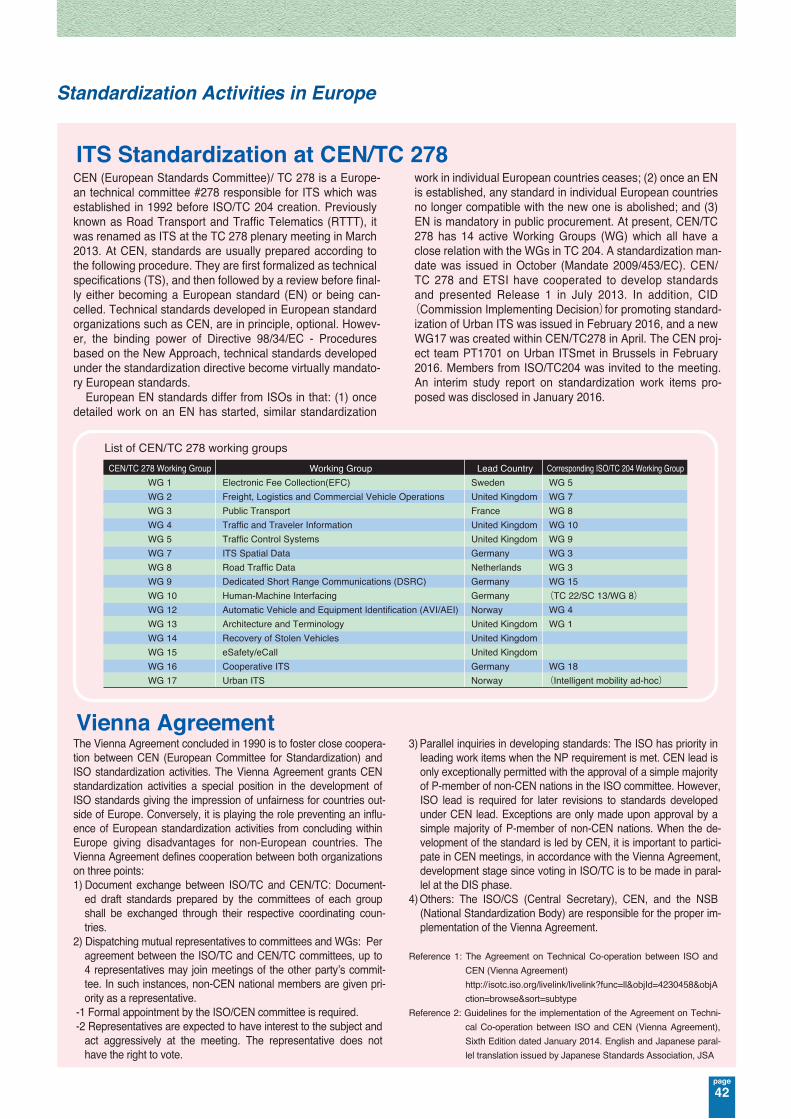
Measurement of Visual BehaviorThis standard determines methods to measure the time spent gazing at information devices. However manually sampling the gaze duration from eye movement videos is prone to increase the variance of results depending on the analysts. Improvements to resolve the issue are being made through the detailed standardization of manual proce-dures and the introduction of technologies to automate the process.
HMI for Automated DrivingAmidst tough competition between countries and compa-nies for the development of automated driving systems, issues such as how to control transfer between the driver and system, and maintaining the driver's situation aware-ness must be addressed. The terminology to be used in measuring driver performance and condition in relation to those issues is currently being defined. Activities in this field may expand to the standardization of HMI in the near future.
Main work items under discussion
System Human Interface Standardization Activities in Europe
ITS Standardization at CEN/TC 278CEN (European Standards Committee)/ TC 278 is a Europe-an technical committee #278 responsible for ITS which was established in 1992 before ISO/TC 204 creation. Previously known as Road Transport and Traffic Telematics (RTTT), it was renamed as ITS at the TC 278 plenary meeting in March 2013. At CEN, standards are usually prepared according to the following procedure. They are first formalized as technical specifications (TS), and then followed by a review before final-ly either becoming a European standard (EN) or being can-celled. Technical standards developed in European standard organizations such as CEN, are in principle, optional. Howev-er, the binding power of Directive 98/34/EC - Procedures based on the New Approach, technical standards developed under the standardization directive become virtually mandato-ry European standards.
European EN standards differ from ISOs in that: (1) once detailed work on an EN has started, similar standardization
work in individual European countries ceases; (2) once an EN is established, any standard in individual European countries no longer compatible with the new one is abolished; and (3) EN is mandatory in public procurement. At present, CEN/TC 278 has 14 active Working Groups (WG) which all have a close relation with the WGs in TC 204. A standardization man-date was issued in October (Mandate 2009/453/EC). CEN/ TC 278 and ETSI have cooperated to develop standards and presented Release 1 in July 2013. In addition, CID(Commission Implementing Decision)for promoting standard-ization of Urban ITS was issued in February 2016, and a new WG17 was created within CEN/TC278 in April. The CEN proj-ect team PT1701 on Urban ITSmet in Brussels in February 2016. Members from ISO/TC204 was invited to the meeting. An interim study report on standardization work items pro-posed was disclosed in January 2016.
Outline of activitiesThe amendment of the existing standards to correspond with new technologies and studies on new standards is being pro-moted. The items under discussion are measurement of visual behaviors, which have a broad range of applications
and significant impact as methods of evaluating onboard equipment in conjunction with visual behaviors. In addition, discussion of HMI in automated driving has also begun.
The deployment of ITS may give cause to concerns that driver workload will increase greatly with the rising number of devices that need to be operated or serve to provide infor-mation. This WG is working on standardizing human-ma-chine interfaces (HMI) to enhance safety by keeping opera-tions simple and minimizing workload. In addition, it is developing standardization scenarios and promoting re-search related to future HMIs.
When TC 204 was founded, WG 13 (Human Factors and MMI) was set up to take charge of standardization of HMI for overall ITS systems, including infrastructure. However, interna-
tional standardization activities were integrated into TC 22 (road vehicles)/SC 13 (Ergonomics)/WG 8 (TICS on-board MMI) in 1998. After that, the WG was renamed to TC 22/SC 39 (Ergonomics)/ WG 8 as part of the restructuration of TC 22 in 2015.
This subcommittee meets with the same members as the corresponding TC 22 Human Interface Subcommittee. This means the WG implements activities as TC 22 when han-dling HMI for on-board ITS units, and also implements activi-ties as TC 204 when dealing with HMI for overall ITS sys-tems, including infrastructure.
Background and objective
List of TC 22/SC 39/WG 8 Work Items Working Group Lead Country
WG 1 Electronic Fee Collection(EFC) Sweden WG 5
WG 2 Freight, Logistics and Commercial Vehicle Operations United Kingdom WG 7
WG 3 Public Transport France WG 8
WG 4 Traffic and Traveler Information United Kingdom WG 10
WG 5 Traffic Control Systems United Kingdom WG 9
WG 7 ITS Spatial Data Germany WG 3
WG 8 Road Traffic Data Netherlands WG 3
WG 9 Dedicated Short Range Communications (DSRC) Germany WG 15
WG 10 Human-Machine Interfacing Germany (TC 22/SC 13/WG 8)WG 12 Automatic Vehicle and Equipment Identification (AVI/AEI) Norway WG 4
WG 13 Architecture and Terminology United Kingdom WG 1
WG 14 Recovery of Stolen Vehicles United Kingdom
WG 15 eSafety/eCall United Kingdom
WG 16 Cooperative ITS Germany WG 18
WG 17 Urban ITS Norway (Intelligent mobility ad-hoc)
List of CEN/TC 278 working groups
CEN/TC 278 Working Group Corresponding ISO/TC 204 Working Group
Vienna AgreementThe Vienna Agreement concluded in 1990 is to foster close coopera-tion between CEN (European Committee for Standardization) and ISO standardization activities. The Vienna Agreement grants CEN standardization activities a special position in the development of ISO standards giving the impression of unfairness for countries out-side of Europe. Conversely, it is playing the role preventing an influ-ence of European standardization activities from concluding within Europe giving disadvantages for non-European countries. The Vienna Agreement defines cooperation between both organizations on three points: 1) Document exchange between ISO/TC and CEN/TC: Document-
ed draft standards prepared by the committees of each group shall be exchanged through their respective coordinating coun-tries.
2) Dispatching mutual representatives to committees and WGs: Per agreement between the ISO/TC and CEN/TC committees, up to 4 representatives may join meetings of the other party’s commit-tee. In such instances, non-CEN national members are given pri-ority as a representative.
-1 Formal appointment by the ISO/CEN committee is required. -2 Representatives are expected to have interest to the subject and
act aggressively at the meeting. The representative does not have the right to vote.
3) Parallel inquiries in developing standards: The ISO has priority in leading work items when the NP requirement is met. CEN lead is only exceptionally permitted with the approval of a simple majority of P-member of non-CEN nations in the ISO committee. However, ISO lead is required for later revisions to standards developed under CEN lead. Exceptions are only made upon approval by a simple majority of P-member of non-CEN nations. When the de-velopment of the standard is led by CEN, it is important to partici-pate in CEN meetings, in accordance with the Vienna Agreement, development stage since voting in ISO/TC is to be made in paral-lel at the DIS phase.
4) Others: The ISO/CS (Central Secretary), CEN, and the NSB (National Standardization Body) are responsible for the proper im-plementation of the Vienna Agreement.
Reference 1: The Agreement on Technical Co-operation between ISO and
CEN (Vienna Agreement)
http://isotc.iso.org/livelink/livelink?func=ll&objId=4230458&objA
ction=browse&sort=subtype
Reference 2: Guidelines for the implementation of the Agreement on Techni-
cal Co-operation between ISO and CEN (Vienna Agreement),
Sixth Edition dated January 2014. English and Japanese paral-
lel translation issued by Japanese Standards Association, JSA
page
42

ISO/TC 211 (Geographic information/Geomatics)
TC 211 has developed many conceptual and structured stan-dards related to aspects of geographic data such as design, quality, spatial referencing, metadata, and services. Since the development of these standards reached the first stage, four out of five WGs were disbanded in October 2001, and four new WGs were established. One of those was WG 8, established to deal with Location Based Services (LBS). In May 2006, WG 8 was suspended, and LBS work items were transferred to WG 10, which deals with ubiquitous public access.
TC 211 has issued 56 international standards, 15 TSs and 3 TRs to date.
At present, higher level implementation standards and field-spe-
cific standards based on the initial ones are under development. At the same time, the basic standards are being revised for compati-bility with the evolution of technology over time, and to rationalize the use of geographic data. Specifically, more than 20 standards for geographic data, covering aspects such as web services, location identifier, cadaster, land cover, ubiquity, and Geospatial Digital Rights Management Reference Model (GeoDRM-RM) are being worked on. Some existing standards, including those on conceptu-al schema language, quality, spatial schema and metadata, are at the revision stage. The outline of these work items is available on the ISO/TC 211 website (www.isotc211.org).
•Standardization activities by TC 211
TC 211 is in charge of the standardization of geographic information. The purpose of TC 211 is to establish structured standards for all information relative to locations on earth, and to promote the expanded use and shar-ing of geographic information.TC 211 was set up in 1994. It is chaired by Norway, and includes 38 P-mem-ber countries and 29 O-member countries. In addition, 21 liaisons with TCs and SCs within the ISO, as well as many external liaisons with international organizations such as UN organizations, the International Hydrographic Or-ganization (IHO) and the International Civil Aviation Organization (ICAO), have been established. In particular, some liaison organizations, including
the Open Geospatial Consortium (OGC), a non-profit international standard-ization organization for geographic data, and the Defense Geospatial Infor-mation Working Group (DGIWG), NATO’s standardization organization for geographic information, are just as active as P-members.
The TC 211 Japanese deliberation organization is the Association of Precise Survey and Applied Technology (APA), which acts as the secretari-at for the ISO/TC 211 National Committee of Japan. APA hosted the 9th ISO/TC 211 plenary meeting in Kyoto in September 1999 as well as the 27th plenary meeting in Tsukuba City, Ibaraki Prefecture, in December 2008.
Standards in close relation to TC 204 are listed below. LBS standards have ‘LBS’ added in front of their titles. Although LBS is not included in work items currently under discussion, or those issued after ISO 19141 was
published in 2008, they are closely related to LBS and ITS. 19147 and 19148 were issued in June 2015 and in 2012 respectively as ISs. In May 2016 amendment work of 19133 was launched.
•Standards deeply related to TC 204
Related Standardization Activities
List of work items related to LBS
Standardization themes ISO number Contents
LBS (Location Based Services) - Reference model ISO 19132
Rules reference model and conceptual frame work for LBS, based on ISO/IEC 10476 (RM-ODP) In practical terms, rules for each LBS service, message data types, and participant models
LBS (Location Based Services) - Tracking and navigation ISO 19133
Rules data types and related operations to implement services of tracking and navigation services
LBS (Location Based Services) - Multimodal routing and navigation
LBS (Location Based Services) - Transfer nodes
ISO 19134Specification of the data form to implement multimodal route planning and navigation, and related operations
Schema for moving features ISO 19141Rules for the conceptual schema of moving features including parallel moving and rotation, but excluding deformation of features themselves
ISO 19147Arrangement of catalogs of features of transport change nodes in multi-modal environments, such as bus stops, stations, seaports, or airports
Linear Referencing ISO 19148Rules location reference systems model common to linear features such as pipelines, coast lines, rivers, roads, railways, or airways
•Cooperation between TC 211 and TC 204TC 204 and TC 211 are closely related as both TCs deal with location-related information. Therefore, TC 211 has liaised with TC 204 since its inception in 1994. In 2004, a new coopera-
tive agreement was established between TC 211 and TC 204 to formalize their intention to cooperate on the development of LBS-related standards.
Founded at the same time as the ISO in 1947, TC 22 is the oldest TC. France acts as Chair and Coordinating country [Secretariat: AFNOR (Association francaisede normalisation) / BNA (Bureau of Automotive Standardization)], and 29 P-mem-ber contries (20 of them are also registered with TC 204) and 44 O-member contries are joining in TC22 activities.
TC 22 plenary meetings are held every 18 months, and the following eight members of P-member countries regularly attend the meetings: France, Germany, the U.S., Japan, Italy, Sweden, South Korea and Malaysia. There are 822 TC22-relat-ed international standards published as of June 2016, and 211 draft standards are currently under discussion. TC 22 previous-ly consisted of 19 SCs out of 26 SCs (each belonging to different technical fields) other than those suspend-ed or disbanded, and 62 WGs, plus eight WGs under direct TC supervision. Recently, however, because of issues such as fluctuations in SC activities due to dif-ferences between mature and growing technologies, and significant operational problems caused by size variations in the organizational structure, and for other reasons, since 2014 SCs have been reorganized in 11 SCs corresponding to technical fields shown below based on the following three approaches to continue to
work on their tasks: (1)A more tightly knit SC framework allowing a functional approach, (2)Revamped project management based on grouping SCs, according to shared specialist members and/or similar specialized knowledge, and (3)High degree of flexibility in dealing with future new projects and improved abili-ty to address issues not currently covered.
Japan has been assigned as Chair and Secretariat of SC 32(Electrical and electronic componentsand general system aspects), and Chair of SC 38 (Motorcycles & Moped). In terms of WGs under the umbrella of SCs, Japan is currently playing a role of convenor in eight WGs to contribute to international standardization activities.
ISO/TC 22 (Road vehicles) standardization activities
Since TC22 and TC204 have both been carrying out standard-ization activities related to automobiles, TC22 has pointed out duplicated contents of duties between TC22 and TC204 in stan-dardization activities related to driving control from the beginning of TC204 establishment. Due to improvement of driving support technology and embodiment of auto-driving technology etc. in these days, in June 2014, a memorandum of understanding was signed between TC22 and TC204 to cooperate each other to promote standardization activities.
・The scopes of both TCs and liaison between them are not changed
・If developing duplicate standard, solve problems between both WGs
・If problems cannot be solved between WGs, they should be solved between both TCs' chairpersons
Based on this memorandum, both TCs have cooperated each other, and developed pedestrian dummy standard in TC22/SC33/WG16 (Active safety test equipments) and standard of performance requirements and test methods of pedestrian collision mitigation system in TC204/WG14. On the other hand, tug of war still continues between both TCs for automated driv-ing-related standardization. In the future, to promote standard-ization activities, which are really necessary for automotive in-dustry, it is important that they will deal with problems flexibly based on the cooperation between the both TCs.
Memorandum of Understanding between TC22 and TC204
Society of Automotive Engineers of Japan has been promoting standardization activities of automotive standards as a domestic deliberation organization of ISO/TC22 (automobile) since 1964 in addition to as a domestic deliberation organization of TC204. In TC22, total of 12 SCs have been set up, including ten SCs each correspond-ing to SC31 through SC41 (*except SC37) and two SCs specific to domestic standardization activities (element and material SCs). Based on this framework, international and domestic standardization activities are carried out.
In activities of standardization, the Standards Committee has developed "Long term plan for establishment/amendment of standars for auotomobile (hereafter referred to as Long Plan)" with a term of five years as a mid to long term standardization activity plan. A series of Long Plans started from "1st Long Plan (1967 to 1971)" and currently "10th Long Plan (2016 to 2020)" is under development to arrange standadization strategies and action plans by SCs focusing around automated driving (advanced driving support), electric vehicles, and communication/information security as focusing area of standardization to further promote activities.
Activities of the Standards Committee in Japan
Standards Committee (TC 22)
Standards Administration Committee
Committee framework
Vehicle communications committeePower electronics systems committeeElectrical and electronic components committeeVehicle dynamics committeePowertrain committeeErgonomics committeeSafety committeeMotorcycles and mopeds committeeVehicle body committeeEnvironment committeeElements committeeMaterials committee
TC 22 Structure
SC 37 Japan Automobile Research Institute(JARI)
SC 31SC 32SC 32SC 33SC 34
SC 35、SC 39SC 36SC 38SC 40SC 41
Cooperation
Committees connected to TC 204
Standards Committee
61 subcomm
ittees ※
Especially in standardization activities for self-driving, because of close relation to TC204, proactive standardization acitvities are carried out in collaboration with ITS standardization committee to preserve Japan's technological advantage.
ISO/TC 22International Chair
Secretariat:AFNOR/BNA
ISO/TC 22 StructureSC
SC 31 Data communicationElectrical and electronic componentsVehicle dynamic components & chassis partsPowertrainIllumination devices and conspicuityCollision safetyElectric vehiclesMotorcycles & mopedsErgonomicsCommercial vehicles, buses and trucksGasoline engine vehicles
Germany/France (alternate years)Japan
GermanyU.S.Italy
FranceGermany
JapanU.S.ItalyItaly
GermanyTC22 Road vehicles France France
JapanGermany
U.S.Italy
FranceGermany
ItalyU.S.ItalyItaly
SC 32SC 33SC 34SC 35SC 36SC 37SC 38SC 39SC 40SC 41
Name Chair Secretariat
※The number of subcommittiees in 2016
page
43
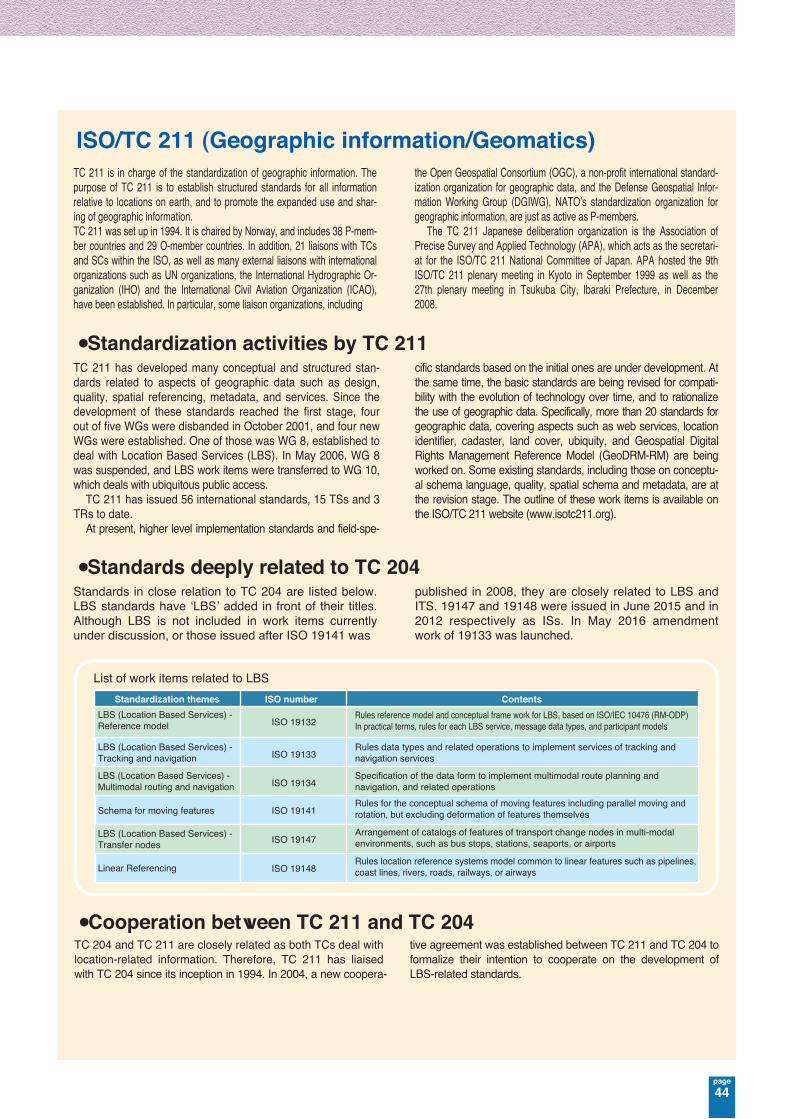
ISO/TC 211 (Geographic information/Geomatics)
TC 211 has developed many conceptual and structured stan-dards related to aspects of geographic data such as design, quality, spatial referencing, metadata, and services. Since the development of these standards reached the first stage, four out of five WGs were disbanded in October 2001, and four new WGs were established. One of those was WG 8, established to deal with Location Based Services (LBS). In May 2006, WG 8 was suspended, and LBS work items were transferred to WG 10, which deals with ubiquitous public access.
TC 211 has issued 56 international standards, 15 TSs and 3 TRs to date.
At present, higher level implementation standards and field-spe-
cific standards based on the initial ones are under development. At the same time, the basic standards are being revised for compati-bility with the evolution of technology over time, and to rationalize the use of geographic data. Specifically, more than 20 standards for geographic data, covering aspects such as web services, location identifier, cadaster, land cover, ubiquity, and Geospatial Digital Rights Management Reference Model (GeoDRM-RM) are being worked on. Some existing standards, including those on conceptu-al schema language, quality, spatial schema and metadata, are at the revision stage. The outline of these work items is available on the ISO/TC 211 website (www.isotc211.org).
•Standardization activities by TC 211
TC 211 is in charge of the standardization of geographic information. The purpose of TC 211 is to establish structured standards for all information relative to locations on earth, and to promote the expanded use and shar-ing of geographic information.TC 211 was set up in 1994. It is chaired by Norway, and includes 38 P-mem-ber countries and 29 O-member countries. In addition, 21 liaisons with TCs and SCs within the ISO, as well as many external liaisons with international organizations such as UN organizations, the International Hydrographic Or-ganization (IHO) and the International Civil Aviation Organization (ICAO), have been established. In particular, some liaison organizations, including
the Open Geospatial Consortium (OGC), a non-profit international standard-ization organization for geographic data, and the Defense Geospatial Infor-mation Working Group (DGIWG), NATO’s standardization organization for geographic information, are just as active as P-members.
The TC 211 Japanese deliberation organization is the Association of Precise Survey and Applied Technology (APA), which acts as the secretari-at for the ISO/TC 211 National Committee of Japan. APA hosted the 9th ISO/TC 211 plenary meeting in Kyoto in September 1999 as well as the 27th plenary meeting in Tsukuba City, Ibaraki Prefecture, in December 2008.
Standards in close relation to TC 204 are listed below. LBS standards have ‘LBS’ added in front of their titles. Although LBS is not included in work items currently under discussion, or those issued after ISO 19141 was
published in 2008, they are closely related to LBS and ITS. 19147 and 19148 were issued in June 2015 and in 2012 respectively as ISs. In May 2016 amendment work of 19133 was launched.
•Standards deeply related to TC 204
Related Standardization Activities
List of work items related to LBS
Standardization themes ISO number Contents
LBS (Location Based Services) - Reference model ISO 19132
Rules reference model and conceptual frame work for LBS, based on ISO/IEC 10476 (RM-ODP) In practical terms, rules for each LBS service, message data types, and participant models
LBS (Location Based Services) - Tracking and navigation ISO 19133
Rules data types and related operations to implement services of tracking and navigation services
LBS (Location Based Services) - Multimodal routing and navigation
LBS (Location Based Services) - Transfer nodes
ISO 19134Specification of the data form to implement multimodal route planning and navigation, and related operations
Schema for moving features ISO 19141Rules for the conceptual schema of moving features including parallel moving and rotation, but excluding deformation of features themselves
ISO 19147Arrangement of catalogs of features of transport change nodes in multi-modal environments, such as bus stops, stations, seaports, or airports
Linear Referencing ISO 19148Rules location reference systems model common to linear features such as pipelines, coast lines, rivers, roads, railways, or airways
•Cooperation between TC 211 and TC 204TC 204 and TC 211 are closely related as both TCs deal with location-related information. Therefore, TC 211 has liaised with TC 204 since its inception in 1994. In 2004, a new coopera-
tive agreement was established between TC 211 and TC 204 to formalize their intention to cooperate on the development of LBS-related standards.
Founded at the same time as the ISO in 1947, TC 22 is the oldest TC. France acts as Chair and Coordinating country [Secretariat: AFNOR (Association francaisede normalisation) / BNA (Bureau of Automotive Standardization)], and 29 P-mem-ber contries (20 of them are also registered with TC 204) and 44 O-member contries are joining in TC22 activities.
TC 22 plenary meetings are held every 18 months, and the following eight members of P-member countries regularly attend the meetings: France, Germany, the U.S., Japan, Italy, Sweden, South Korea and Malaysia. There are 822 TC22-relat-ed international standards published as of June 2016, and 211 draft standards are currently under discussion. TC 22 previous-ly consisted of 19 SCs out of 26 SCs (each belonging to different technical fields) other than those suspend-ed or disbanded, and 62 WGs, plus eight WGs under direct TC supervision. Recently, however, because of issues such as fluctuations in SC activities due to dif-ferences between mature and growing technologies, and significant operational problems caused by size variations in the organizational structure, and for other reasons, since 2014 SCs have been reorganized in 11 SCs corresponding to technical fields shown below based on the following three approaches to continue to
work on their tasks: (1)A more tightly knit SC framework allowing a functional approach, (2)Revamped project management based on grouping SCs, according to shared specialist members and/or similar specialized knowledge, and (3)High degree of flexibility in dealing with future new projects and improved abili-ty to address issues not currently covered.
Japan has been assigned as Chair and Secretariat of SC 32(Electrical and electronic componentsand general system aspects), and Chair of SC 38 (Motorcycles & Moped). In terms of WGs under the umbrella of SCs, Japan is currently playing a role of convenor in eight WGs to contribute to international standardization activities.
ISO/TC 22 (Road vehicles) standardization activities
Since TC22 and TC204 have both been carrying out standard-ization activities related to automobiles, TC22 has pointed out duplicated contents of duties between TC22 and TC204 in stan-dardization activities related to driving control from the beginning of TC204 establishment. Due to improvement of driving support technology and embodiment of auto-driving technology etc. in these days, in June 2014, a memorandum of understanding was signed between TC22 and TC204 to cooperate each other to promote standardization activities.
・The scopes of both TCs and liaison between them are not changed
・If developing duplicate standard, solve problems between both WGs
・If problems cannot be solved between WGs, they should be solved between both TCs' chairpersons
Based on this memorandum, both TCs have cooperated each other, and developed pedestrian dummy standard in TC22/SC33/WG16 (Active safety test equipments) and standard of performance requirements and test methods of pedestrian collision mitigation system in TC204/WG14. On the other hand, tug of war still continues between both TCs for automated driv-ing-related standardization. In the future, to promote standard-ization activities, which are really necessary for automotive in-dustry, it is important that they will deal with problems flexibly based on the cooperation between the both TCs.
Memorandum of Understanding between TC22 and TC204
Society of Automotive Engineers of Japan has been promoting standardization activities of automotive standards as a domestic deliberation organization of ISO/TC22 (automobile) since 1964 in addition to as a domestic deliberation organization of TC204. In TC22, total of 12 SCs have been set up, including ten SCs each correspond-ing to SC31 through SC41 (*except SC37) and two SCs specific to domestic standardization activities (element and material SCs). Based on this framework, international and domestic standardization activities are carried out.
In activities of standardization, the Standards Committee has developed "Long term plan for establishment/amendment of standars for auotomobile (hereafter referred to as Long Plan)" with a term of five years as a mid to long term standardization activity plan. A series of Long Plans started from "1st Long Plan (1967 to 1971)" and currently "10th Long Plan (2016 to 2020)" is under development to arrange standadization strategies and action plans by SCs focusing around automated driving (advanced driving support), electric vehicles, and communication/information security as focusing area of standardization to further promote activities.
Activities of the Standards Committee in Japan
Standards Committee (TC 22)
Standards Administration Committee
Committee framework
Vehicle communications committeePower electronics systems committeeElectrical and electronic components committeeVehicle dynamics committeePowertrain committeeErgonomics committeeSafety committeeMotorcycles and mopeds committeeVehicle body committeeEnvironment committeeElements committeeMaterials committee
TC 22 Structure
SC 37 Japan Automobile Research Institute(JARI)
SC 31SC 32SC 32SC 33SC 34
SC 35、SC 39SC 36SC 38SC 40SC 41
Cooperation
Committees connected to TC 204
Standards Committee
61 subcomm
ittees ※
Especially in standardization activities for self-driving, because of close relation to TC204, proactive standardization acitvities are carried out in collaboration with ITS standardization committee to preserve Japan's technological advantage.
ISO/TC 22International Chair
Secretariat:AFNOR/BNA
ISO/TC 22 StructureSC
SC 31 Data communicationElectrical and electronic componentsVehicle dynamic components & chassis partsPowertrainIllumination devices and conspicuityCollision safetyElectric vehiclesMotorcycles & mopedsErgonomicsCommercial vehicles, buses and trucksGasoline engine vehicles
Germany/France (alternate years)Japan
GermanyU.S.Italy
FranceGermany
JapanU.S.ItalyItaly
GermanyTC22 Road vehicles France France
JapanGermany
U.S.Italy
FranceGermany
ItalyU.S.ItalyItaly
SC 32SC 33SC 34SC 35SC 36SC 37SC 38SC 39SC 40SC 41
Name Chair Secretariat
※The number of subcommittiees in 2016
page
44
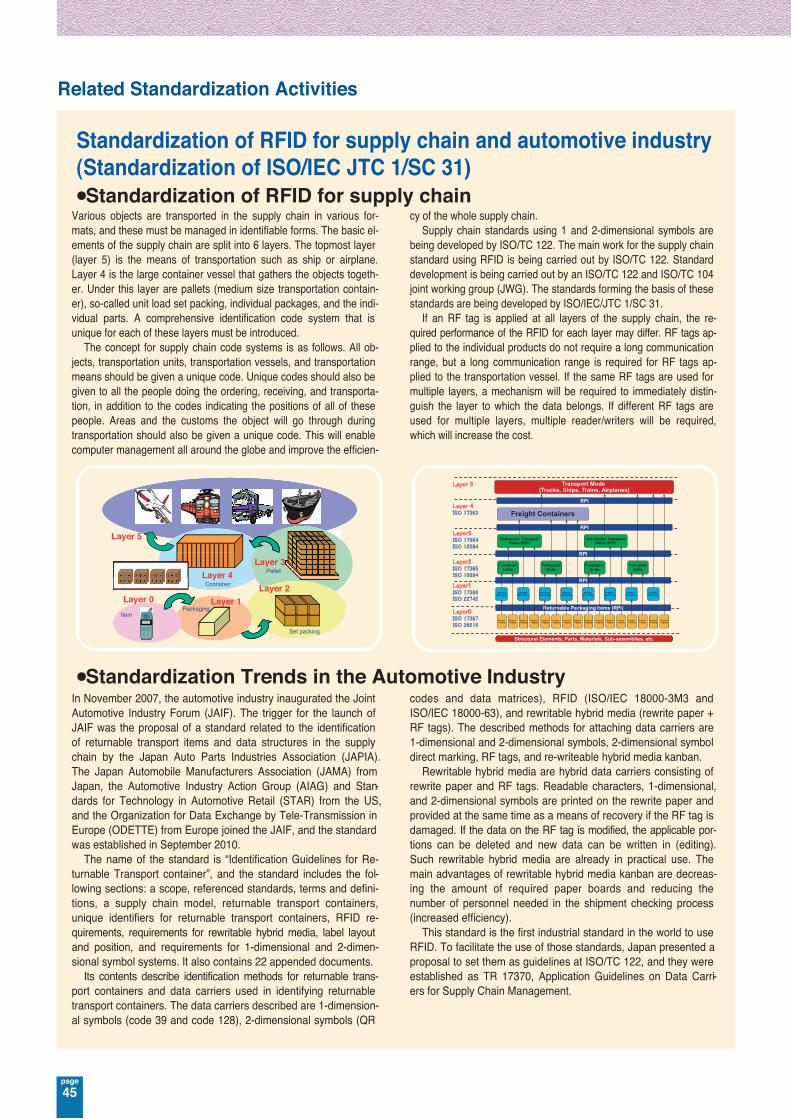
Higher layer standards
UDP/TCP
LLC
PHY
WAVE MAC(including channel coordination)
IPv6 WSMP
1609
.3
1609.2
Man
agem
ent
Secu
rity
1609
.480
2.11
1609.111609.6(TBD) 1609.12
ITS-related Standardizations in IEEE
•Standardizations in IEEE 802 CommitteeIEEE 802 is a committee conducting LAN (Local Area Network) and MAN (Metropolitan Area Network) related standardization activities,
and includes Working Groups (WGs) for both wired and wireless technologies. Table 1 lists wireless technology WGs related to ITS.
●Standardizations in IEEE Project 1609The ITS communication system in the U.S. is referred to as WAVE (Wireless Access in Vehicular Environments). While WAVE communication media are to use the above-mentioned IEEE 802.11p, the other parts are supposed to use the IEEE 1609 standards prepared in IEEE project 1609.
Standards 1609.0 to 1609.4, 1609.11, and 1609.12 have been complet-ed and issued, but some parts are being revised. 1609.1 is being newly de-veloped as 1609.6 The overall WAVE architecture is shown in the figure on the left.
WLAN, WMAN and MBWA are considered applicable as media for ITS communications between the roadside and the vehicle and between vehi-cles. WPAN can be used as a communication media for short distances such as inside the vehicle. WRAN may also be applicable to ITS. Future ITS equipment is expected to use multiple communication media, and technology capable of continuing communication by switching across dif-ferent kind of networks (handover) is considered necessary.
IEEE 802.11 WG is conducting versatile standardization activities with many Task Groups under it. Among them, Task Group p has enhanced the functions of the IEEE 802.11 wireless LAN protocol and issued it as the IEEE 802.11p standard. This protocol uses OFDM modulation to achieve efficient data transmission in harsh environments, and is suitable for applications that require a fast response as it uses a communication control method that allows links to be established quickly.
U.S. allocated the 5.9GHz band for ITS communications in 1999, and conducted various tests using IEEE 802.11p which at that time was not yet a finalized standard.
The draft of IEEE 802.11p was tentatively finished at the beginning of 2006. Since then it has been refined through repeated revisions, with final approval being received in June 2010. In August 2014, the National High-way Traffic Safety Administration agency of the U.S. Department of Trans-portation presented an Advance Notice of Proposed Rulemaking (ANPRM)
and started procedure to systematize the installation of IEEE802.11p-based vehicle-to-vehicle communication devices in new compact vehicles.
In January 2016 draft rules were presented as NPRM to OIRA (U.S. Office of Information and Regulatory Affairs).
The 5.9GHz band was also allocated in Europe in 2008 in anticipation of the use of IEEE 802.11p, and considerable testing was conducted. In 2009, the ITS technology committee of the European Telecommunications Standards Institute (ETSI) agreed on the ITS-G5 communication standard using IEEE 802.11p. Mean-while use of IEEE 802.11p as a communication medium in CALM systems (which are being standardized by ISO TC204 WG16) was also standardized as ISO 21215, and it is anticipated that this will be one of main communication media.
Table 1 ITS related Working Groups under IEEE 802 Committee
802.11
802.15
802.16
802.20
802.21
802.22
Standardizations for Wireless Local Area Network (WLAN)
Standardizations for Wireless Personal Area Network (WPAN)
Standardizations for Wireless Metropolitan Area Network (WMAN)
Standardizations for Mobile Broadband Wireless Access (MBWA)
Standardizations for handover between heterogeneous networks
Standardizations for Wireless Regional Area Network (WRAN)
Deals with technologies for wireless communication within a building and/ or facility (Several tens to several hundreds meters)Deals with technologies for wireless communication within a room (Several to several tens meters)Deals with technologies for wireless communication within a region like a city (Several to several ten kms)Deals with broadband IP wireless communication in high speed mobile environments such as vehiclesDeals with technologies to continue communication by switching across different kind of networksDeals with cognitive radio technologies enabling communications in TV broadcast band without causing interference
Table 2 Outline of IEEE 802.11p Specifications
Frequency band to be used
Channel band width
Number channels
Modulation method
Max. transmission power/communication distance
Medium access method
5.85-5.925 GHz
10 MHz (Optionally 20 MHz available in part)
7
OFDM (same as IEEE802.11a)
Class A: 0 dBm/ 15m, Class B: 10 dBm/100mClass C: 20 dBm/400m, Class D: 28.8 dBm/1000m
RSU and OBU are substantially equal. Quick link establishment
Related Standardization Activities
Various objects are transported in the supply chain in various for-mats, and these must be managed in identifiable forms. The basic el-ements of the supply chain are split into 6 layers. The topmost layer (layer 5) is the means of transportation such as ship or airplane. Layer 4 is the large container vessel that gathers the objects togeth-er. Under this layer are pallets (medium size transportation contain-er), so-called unit load set packing, individual packages, and the indi-vidual parts. A comprehensive identification code system that is unique for each of these layers must be introduced.
The concept for supply chain code systems is as follows. All ob-jects, transportation units, transportation vessels, and transportation means should be given a unique code. Unique codes should also be given to all the people doing the ordering, receiving, and transporta-tion, in addition to the codes indicating the positions of all of these people. Areas and the customs the object will go through during transportation should also be given a unique code. This will enable computer management all around the globe and improve the efficien-
cy of the whole supply chain.Supply chain standards using 1 and 2-dimensional symbols are
being developed by ISO/TC 122. The main work for the supply chain standard using RFID is being carried out by ISO/TC 122. Standard development is being carried out by an ISO/TC 122 and ISO/TC 104 joint working group (JWG). The standards forming the basis of these standards are being developed by ISO/IEC/JTC 1/SC 31.
If an RF tag is applied at all layers of the supply chain, the re-quired performance of the RFID for each layer may differ. RF tags ap-plied to the individual products do not require a long communication range, but a long communication range is required for RF tags ap-plied to the transportation vessel. If the same RF tags are used for multiple layers, a mechanism will be required to immediately distin-guish the layer to which the data belongs. If different RF tags are used for multiple layers, multiple reader/writers will be required, which will increase the cost.
•Standardization of RFID for supply chain
In November 2007, the automotive industry inaugurated the Joint Automotive Industry Forum (JAIF). The trigger for the launch of JAIF was the proposal of a standard related to the identification of returnable transport items and data structures in the supply chain by the Japan Auto Parts Industries Association (JAPIA). The Japan Automobile Manufacturers Association (JAMA) from Japan, the Automotive Industry Action Group (AIAG) and Stan-dards for Technology in Automotive Retail (STAR) from the US, and the Organization for Data Exchange by Tele-Transmission in Europe (ODETTE) from Europe joined the JAIF, and the standard was established in September 2010.
The name of the standard is “Identification Guidelines for Re-turnable Transport container”, and the standard includes the fol-lowing sections: a scope, referenced standards, terms and defini-tions, a supply chain model, returnable transport containers, unique identifiers for returnable transport containers, RFID re-quirements, requirements for rewritable hybrid media, label layout and position, and requirements for 1-dimensional and 2-dimen-sional symbol systems. It also contains 22 appended documents.
Its contents describe identification methods for returnable trans-port containers and data carriers used in identifying returnable transport containers. The data carriers described are 1-dimension-al symbols (code 39 and code 128), 2-dimensional symbols (QR
codes and data matrices), RFID (ISO/IEC 18000-3M3 and ISO/IEC 18000-63), and rewritable hybrid media (rewrite paper + RF tags). The described methods for attaching data carriers are 1-dimensional and 2-dimensional symbols, 2-dimensional symbol direct marking, RF tags, and re-writeable hybrid media kanban.
Rewritable hybrid media are hybrid data carriers consisting of rewrite paper and RF tags. Readable characters, 1-dimensional, and 2-dimensional symbols are printed on the rewrite paper and provided at the same time as a means of recovery if the RF tag is damaged. If the data on the RF tag is modified, the applicable por-tions can be deleted and new data can be written in (editing). Such rewritable hybrid media are already in practical use. The main advantages of rewritable hybrid media kanban are decreas-ing the amount of required paper boards and reducing the number of personnel needed in the shipment checking process (increased efficiency).
This standard is the first industrial standard in the world to use RFID. To facilitate the use of those standards, Japan presented a proposal to set them as guidelines at ISO/TC 122, and they were established as TR 17370, Application Guidelines on Data Carri-ers for Supply Chain Management.
•Standardization Trends in the Automotive Industry
Standardization of RFID for supply chain and automotive industry(Standardization of ISO/IEC JTC 1/SC 31)
Layer 5
Layer 3Pallet
Layer 0Layer 2
ItemPackaging
Layer 1
ContainerLayer 4
Set packing
Layer 5
Product Packaging
Product Packaging
Product Packaging
Product Packaging
Product Packaging
Transport Units
Transport Units
Transport Units
Returnable Transport Items (RTI)
Returnable Transport Items (RTI)
Freight Containers
Transport Mode (Trucks, Ships, Trains, Airplanes)
RPI
RPI
Structural Elements, Parts, Materials, Sub-assemblies, etc.
Returnable Packaging Items (RPI)
RPI
RPI
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Packaging
Product Tagging
Product Tagging
Product Packaging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Transport Units
Product Packaging
Product Tagging
Product Tagging
Layer 4 ISO 17363
Layer3 ISO 17364 ISO 15394
Layer2 ISO 17365 ISO 15394
Layer1 ISO 17366 ISO 22742
Layer0 ISO 17367 ISO 28219
page
45

Higher layer standards
UDP/TCP
LLC
PHY
WAVE MAC(including channel coordination)
IPv6 WSMP
1609
.3
1609.2
Man
agem
ent
Secu
rity
1609
.480
2.11
1609.111609.6(TBD) 1609.12
ITS-related Standardizations in IEEE
•Standardizations in IEEE 802 CommitteeIEEE 802 is a committee conducting LAN (Local Area Network) and MAN (Metropolitan Area Network) related standardization activities,
and includes Working Groups (WGs) for both wired and wireless technologies. Table 1 lists wireless technology WGs related to ITS.
●Standardizations in IEEE Project 1609The ITS communication system in the U.S. is referred to as WAVE (Wireless Access in Vehicular Environments). While WAVE communication media are to use the above-mentioned IEEE 802.11p, the other parts are supposed to use the IEEE 1609 standards prepared in IEEE project 1609.
Standards 1609.0 to 1609.4, 1609.11, and 1609.12 have been complet-ed and issued, but some parts are being revised. 1609.1 is being newly de-veloped as 1609.6 The overall WAVE architecture is shown in the figure on the left.
WLAN, WMAN and MBWA are considered applicable as media for ITS communications between the roadside and the vehicle and between vehi-cles. WPAN can be used as a communication media for short distances such as inside the vehicle. WRAN may also be applicable to ITS. Future ITS equipment is expected to use multiple communication media, and technology capable of continuing communication by switching across dif-ferent kind of networks (handover) is considered necessary.
IEEE 802.11 WG is conducting versatile standardization activities with many Task Groups under it. Among them, Task Group p has enhanced the functions of the IEEE 802.11 wireless LAN protocol and issued it as the IEEE 802.11p standard. This protocol uses OFDM modulation to achieve efficient data transmission in harsh environments, and is suitable for applications that require a fast response as it uses a communication control method that allows links to be established quickly.
U.S. allocated the 5.9GHz band for ITS communications in 1999, and conducted various tests using IEEE 802.11p which at that time was not yet a finalized standard.
The draft of IEEE 802.11p was tentatively finished at the beginning of 2006. Since then it has been refined through repeated revisions, with final approval being received in June 2010. In August 2014, the National High-way Traffic Safety Administration agency of the U.S. Department of Trans-portation presented an Advance Notice of Proposed Rulemaking (ANPRM)
and started procedure to systematize the installation of IEEE802.11p-based vehicle-to-vehicle communication devices in new compact vehicles.
In January 2016 draft rules were presented as NPRM to OIRA (U.S. Office of Information and Regulatory Affairs).
The 5.9GHz band was also allocated in Europe in 2008 in anticipation of the use of IEEE 802.11p, and considerable testing was conducted. In 2009, the ITS technology committee of the European Telecommunications Standards Institute (ETSI) agreed on the ITS-G5 communication standard using IEEE 802.11p. Mean-while use of IEEE 802.11p as a communication medium in CALM systems (which are being standardized by ISO TC204 WG16) was also standardized as ISO 21215, and it is anticipated that this will be one of main communication media.
Table 1 ITS related Working Groups under IEEE 802 Committee
802.11
802.15
802.16
802.20
802.21
802.22
Standardizations for Wireless Local Area Network (WLAN)
Standardizations for Wireless Personal Area Network (WPAN)
Standardizations for Wireless Metropolitan Area Network (WMAN)
Standardizations for Mobile Broadband Wireless Access (MBWA)
Standardizations for handover between heterogeneous networks
Standardizations for Wireless Regional Area Network (WRAN)
Deals with technologies for wireless communication within a building and/ or facility (Several tens to several hundreds meters)Deals with technologies for wireless communication within a room (Several to several tens meters)Deals with technologies for wireless communication within a region like a city (Several to several ten kms)Deals with broadband IP wireless communication in high speed mobile environments such as vehiclesDeals with technologies to continue communication by switching across different kind of networksDeals with cognitive radio technologies enabling communications in TV broadcast band without causing interference
Table 2 Outline of IEEE 802.11p Specifications
Frequency band to be used
Channel band width
Number channels
Modulation method
Max. transmission power/communication distance
Medium access method
5.85-5.925 GHz
10 MHz (Optionally 20 MHz available in part)
7
OFDM (same as IEEE802.11a)
Class A: 0 dBm/ 15m, Class B: 10 dBm/100mClass C: 20 dBm/400m, Class D: 28.8 dBm/1000m
RSU and OBU are substantially equal. Quick link establishment
Related Standardization Activities
Various objects are transported in the supply chain in various for-mats, and these must be managed in identifiable forms. The basic el-ements of the supply chain are split into 6 layers. The topmost layer (layer 5) is the means of transportation such as ship or airplane. Layer 4 is the large container vessel that gathers the objects togeth-er. Under this layer are pallets (medium size transportation contain-er), so-called unit load set packing, individual packages, and the indi-vidual parts. A comprehensive identification code system that is unique for each of these layers must be introduced.
The concept for supply chain code systems is as follows. All ob-jects, transportation units, transportation vessels, and transportation means should be given a unique code. Unique codes should also be given to all the people doing the ordering, receiving, and transporta-tion, in addition to the codes indicating the positions of all of these people. Areas and the customs the object will go through during transportation should also be given a unique code. This will enable computer management all around the globe and improve the efficien-
cy of the whole supply chain.Supply chain standards using 1 and 2-dimensional symbols are
being developed by ISO/TC 122. The main work for the supply chain standard using RFID is being carried out by ISO/TC 122. Standard development is being carried out by an ISO/TC 122 and ISO/TC 104 joint working group (JWG). The standards forming the basis of these standards are being developed by ISO/IEC/JTC 1/SC 31.
If an RF tag is applied at all layers of the supply chain, the re-quired performance of the RFID for each layer may differ. RF tags ap-plied to the individual products do not require a long communication range, but a long communication range is required for RF tags ap-plied to the transportation vessel. If the same RF tags are used for multiple layers, a mechanism will be required to immediately distin-guish the layer to which the data belongs. If different RF tags are used for multiple layers, multiple reader/writers will be required, which will increase the cost.
•Standardization of RFID for supply chain
In November 2007, the automotive industry inaugurated the Joint Automotive Industry Forum (JAIF). The trigger for the launch of JAIF was the proposal of a standard related to the identification of returnable transport items and data structures in the supply chain by the Japan Auto Parts Industries Association (JAPIA). The Japan Automobile Manufacturers Association (JAMA) from Japan, the Automotive Industry Action Group (AIAG) and Stan-dards for Technology in Automotive Retail (STAR) from the US, and the Organization for Data Exchange by Tele-Transmission in Europe (ODETTE) from Europe joined the JAIF, and the standard was established in September 2010.
The name of the standard is “Identification Guidelines for Re-turnable Transport container”, and the standard includes the fol-lowing sections: a scope, referenced standards, terms and defini-tions, a supply chain model, returnable transport containers, unique identifiers for returnable transport containers, RFID re-quirements, requirements for rewritable hybrid media, label layout and position, and requirements for 1-dimensional and 2-dimen-sional symbol systems. It also contains 22 appended documents.
Its contents describe identification methods for returnable trans-port containers and data carriers used in identifying returnable transport containers. The data carriers described are 1-dimension-al symbols (code 39 and code 128), 2-dimensional symbols (QR
codes and data matrices), RFID (ISO/IEC 18000-3M3 and ISO/IEC 18000-63), and rewritable hybrid media (rewrite paper + RF tags). The described methods for attaching data carriers are 1-dimensional and 2-dimensional symbols, 2-dimensional symbol direct marking, RF tags, and re-writeable hybrid media kanban.
Rewritable hybrid media are hybrid data carriers consisting of rewrite paper and RF tags. Readable characters, 1-dimensional, and 2-dimensional symbols are printed on the rewrite paper and provided at the same time as a means of recovery if the RF tag is damaged. If the data on the RF tag is modified, the applicable por-tions can be deleted and new data can be written in (editing). Such rewritable hybrid media are already in practical use. The main advantages of rewritable hybrid media kanban are decreas-ing the amount of required paper boards and reducing the number of personnel needed in the shipment checking process (increased efficiency).
This standard is the first industrial standard in the world to use RFID. To facilitate the use of those standards, Japan presented a proposal to set them as guidelines at ISO/TC 122, and they were established as TR 17370, Application Guidelines on Data Carri-ers for Supply Chain Management.
•Standardization Trends in the Automotive Industry
Standardization of RFID for supply chain and automotive industry(Standardization of ISO/IEC JTC 1/SC 31)
Layer 5
Layer 3Pallet
Layer 0Layer 2
ItemPackaging
Layer 1
ContainerLayer 4
Set packing
Layer 5
Product Packaging
Product Packaging
Product Packaging
Product Packaging
Product Packaging
Transport Units
Transport Units
Transport Units
Returnable Transport Items (RTI)
Returnable Transport Items (RTI)
Freight Containers
Transport Mode (Trucks, Ships, Trains, Airplanes)
RPI
RPI
Structural Elements, Parts, Materials, Sub-assemblies, etc.
Returnable Packaging Items (RPI)
RPI
RPI
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Product Packaging
Product Tagging
Product Tagging
Product Packaging
Product Tagging
Product Tagging
Product Tagging
Product Tagging
Transport Units
Product Packaging
Product Tagging
Product Tagging
Layer 4 ISO 17363
Layer3 ISO 17364 ISO 15394
Layer2 ISO 17365 ISO 15394
Layer1 ISO 17366 ISO 22742
Layer0 ISO 17367 ISO 28219
1609.0 WAVE Architecture(Trial std.)1609.1 Remote Management Services(disbanded) 1609.2 Security Services for Application and Management Messages1609.3 Networking Services1609.4 Multi-Channel Operations1609.5 Communication Manager1609.6 Remote Management Services
1609.11 Over-the-Air Data Exchange Protocol for ITS1609.12 Provider Service Identifier(PSID)Allocations
Table 3 Standardization Items in IEEE 1609
page
46

Name of the document Document number Content
Millimetre wave radars and radiocommunicationsystems
Dedicated Short Range Communications (DSRC) at 5.8 GHz
Guidelines and Objectives
ITU-R M.1452-2 Recommendation for millimeter wave ITS radiocommunication on technical standards and parameters of low power collision-prevention radar at 60 GHz / 76 GHz and radiocommunication at 60 GHz. ITU-R M.1453-2 Recommendation for dedicated short-range communications in 5.8 GHz band comprising the active method in Japan, the passive method in Europe and the high data-rate passive method in Italy; In 2002, the recommendation was revised according to the promotion of high data rate DSRC in Japan, and in 2005, it was revised again to reflect the Japanese ASL (Application Sub Layer)
ITU-R M.1890 A new recommendation to replace ITU-R M.1310(deleted in 2011), which mainly documents the architecture of ITS communications providing the ITS communications requirements
Outline of recommendation documents
Automotive radars ITU-R M.2057 System characteristics of the automotive radar operated in the 76 to 81 GHz frequency band for ITS applications
Vehicle to Vehicle, Vehicle to Infrastructure Communications
ITU-R M.2084 Interface for V2V and V2X wireless communication.
ISO/TC 204 has carried out numerous standardization activities on subjects pertaining to ITS. Standards are enacted by discuss-
ing and voting upon those subjects in accordance with the rules on developing standards specified in the ISO/IEC Directives.
Development of International Standards
ITS standardization in ITU-R originated with the proposal of a new Study Question in 1994 and adopted in 1995. Subsequently,
"M.1310", which describes the wireless requirements for ITS, was approved as a recommendation in 1997. This recommendation is a document to describe the architecture of ITS radio communica-tions. Based on this policy, three recommendations were drafted and approved: Functionalities, 60/76 GHz short-range radar, and 5.8 GHz dedicated short range communications.
A study of the millimeter wave ITS communication was dis-cussed and added to the existing recommendation (M.1452) related to the millimeter wave radar, and a revision of the recom-mendation took place in 2012.
Further, through Japan-led efforts, the Land Mobile Handbook Volume 4 (Intelligent Transport Systems) was published in 2007. It contains all the international trends in ITS radio communications.
Currently, to realize systems such as driving safety support system that contributes to reducing traffic accidents, studies on the
application of advanced ITS radio communication systems using road-to-vehicle and vehicle-to-vehicle communications are under-way in Japan, the U.S., and Europe. In light of such trends, Japan proposed replacing Recommendation M.1310 with its own “ITS Guidelines and Objectives”, which became a Recommendation in April 2011. Moreover, Japan has made technical proposals on advanced ITS wireless system using the 700 MHz band and this system was included in the Report ITU-R M.2228 in November 2011.
Since 2013, a new vehicle communications recommendation that reflects the results of the standardization of 700 MHz advanced ITS wireless systems and the European ETSI was pre-pared. In addition, work was also made on a recommendation for high-resolution radars using the 79 GHz band.
The following section describes the background to the creation of the ITS recommendations and outlines the attendant documents.
Standardization of ITS in ITU-R
In the ITS communications field, the International Telecommunications Union (ITU) does standardization work such as preparing recommen-dations. ITU is the United Nations specialized agancy for information and communication technologies whose membership includes 193 Member States, as well as Sector Members and Associates from nearly 800 organizations as of July 2016.
ITU is composed of three sectors: ITU-R (Radio communications), ITU-T (Telecommunications), ITU-D (Telecommunications develop-ment).
ITU-R is involved in the adoption of international regulations and international treaties regarding terrestrial and space (satellite) fre-quency allocation (and the orbital position of geostationary satellites). Countries must establish relevant laws and regulations in accor-
dance with the rules and treaties. Recommendations, which are the basic principles for wireless communications, were created by study groups (SG), which are lower level bodies under ITU-R. The SGs were reorganized in 2007, with SG 5 (Terrestrial services) chosen to handle ITS. Further lower bodies of SG 5 are called WPs (working parties), and WP 5A (Land mobile service above 30 MHz (excluding IMT); wireless access in the fixed service; amateur and amateur-sat-ellite services) is in charge of ITS-related standardization.
ITU-T is also responsible for creating recommendations for research and standardization against the technologies and the usage of telecommunication. ITU-T/ SG 16 (Multimedia) takes its roll in standardization of multimedia related to ITS.
ITS-related standardization in ITUWhat is ITU?
Related Standardization Activities
SR ballot
Revision
Amendment
Minor Revision
TechnicalCorrigendum
Amend/Revise Confirm Withdraw WDRL ballot
Deliverable Max. lifeMax. elapsed time beforesystematic review
Max. number of timesdeliverables may be confirmed
IS 5 years No limit No limit
TS 3 years Once recommended Preferably 6 times
TR Not specified Not specified No limit
PAS3 years
(No default actionby ISO CS)
Once
6 yearsIf not converted after thisperiod, the deliverable isproposed for withdrawal
Target deadlines for standard publication
Timing of systematic reviews
Development stage
Proposal stage NPProposal → Approval
→ RegistrationProposal → Approval
→ RegistrationProposal → Approval
→ Registration
Preparation stage WD - 12 12
Committee stage CD 6 6 12
Enquiry stage DIS 12 12 19
Approval stage FDIS/IS 6 6 5
Document
Fast (24) Standard (36) Prolonged (48)
Target deadline (months)
Conditions for automatically deleting work items- A PWI does not move to the NP stage within 3 years.- No decision on follow-up actions is made within six
months following the DIS or FDIS target deadline.- If DIS approval is not reached within five years after NP
registration.
SR ballot (ballot period: 20 weeks)
When significant corrections are made.The edition number is updated and the standard is reissued.
When partial amendments are added.Only the amended portions are published as a separate document.Maximum of 2 times.
When technical incorrect values are corrected.Only the amended portions are published as a separate document.
When minor changes with no impact on technical contents are made.
Document published when agreement on an international standard cannot be reached immediately for a standardization item because it is still at the development stage, or for any other reason, even if such agreement is likely to be reached in the future.
Intermediate specification published ahead of the completion of an international standard. Agreement is reached at the NP stage.
Document containing data different from an international standard. It must not include matter implying that it is normative.
The making process of the recommendations for ITS1994 Question for ITS Drafting of recommendation documents (Answers to the questions)
Present condition of spectrum for ITS
Requirements for spectrum for ITS
Individual technologies
1995
Radiocommunication services
* Rec. ITU-R M. 1453-2 : Newly revised in 2005
- Broadcasting- DSRC (Dedicated short-range communications)- Short-range vehicular radar- Short-range vehicle-to-vehicle communications- Short-range continuous communications- Wide area communications
Objectives and requirements
Functionalities
Short-range vehicular radar
5.8 GHz DSRC
(VICS)
Approved in 1997, Deleted in 2011 : Rec. ITU-R M.1310
Approved in 2000, deleted in 2007 : Rec. ITU-R M.1451
Millimeter-waveITS radiocommunication
Approved in 2000 :Rec. ITU-R M. 1452 *
*Revised in 2012
1996 1997 1998 2009 2010 2011 2012 2013 2014 2015……………………………………ITS-Guidelines and
objectives
Approved in 2011 : Rec. ITU-R M.1890
V2X
79GHz rader
*2015 revision2011:Rep. ITU-R M. 2228
Next generation ITS radiocommunication
Approved in 2000 :Rec. ITU-R M. 1453-2 *
Approved in 2015:Rec. ITU-R M. 2084
Approved in 2014 :Rec. ITU-R M. 2057
Preliminary stage(PWI)
Proposal stage(NP)
Committee stage(CD)
Enquiry stage (DIS)
Publishing stage(ISO)
Approval stage(FDIS)
NP ballot
CD ballot
DIS ballot
Preparation stage(WD)
Agreement to register a PWIProposed to the TC from the WG. Requires TC resolution.
NP registrationForm 4 presented from the proposer to the TC.
CD registrationCompleted WD to be circulated to the TC.CD stage can be skipped by either TC resolution or CIB.
DIS ballot (ballot period: 12 weeks)Approved by agreement of 2/3 or more of votingP-members and less than 1/4 negative votes.TC circulates the result of the voting to the CS (Form 13).
Carried out when the DIS ballot results in a large number of comments leading to technical changes.(Usually skipped.)
Other types of standards
TS : Published by two-thirds majority of voting P-members.PAS : Published by simple majority of voting P-members.TR : Published by simple majority of voting P-members.
CD ballot (ballot period: 8 weeks is standard)Approved by agreement of 2/3 or more of votingP-members.
NP ballot (ballot period : 12 weeks in stadard)Requires agreement by a simple majority of voting P-members and the participation of experts from 5 countries. TC circulates the result of the voting to the CS (Form 6).
A review is performed every 5 years after the standard is issued.After the vote, the next step is determined by Committee decision.
page
47

Name of the document Document number Content
Millimetre wave radars and radiocommunicationsystems
Dedicated Short Range Communications (DSRC) at 5.8 GHz
Guidelines and Objectives
ITU-R M.1452-2 Recommendation for millimeter wave ITS radiocommunication on technical standards and parameters of low power collision-prevention radar at 60 GHz / 76 GHz and radiocommunication at 60 GHz. ITU-R M.1453-2 Recommendation for dedicated short-range communications in 5.8 GHz band comprising the active method in Japan, the passive method in Europe and the high data-rate passive method in Italy; In 2002, the recommendation was revised according to the promotion of high data rate DSRC in Japan, and in 2005, it was revised again to reflect the Japanese ASL (Application Sub Layer)
ITU-R M.1890 A new recommendation to replace ITU-R M.1310(deleted in 2011), which mainly documents the architecture of ITS communications providing the ITS communications requirements
Outline of recommendation documents
Automotive radars ITU-R M.2057 System characteristics of the automotive radar operated in the 76 to 81 GHz frequency band for ITS applications
Vehicle to Vehicle, Vehicle to Infrastructure Communications
ITU-R M.2084 Interface for V2V and V2X wireless communication.
ISO/TC 204 has carried out numerous standardization activities on subjects pertaining to ITS. Standards are enacted by discuss-
ing and voting upon those subjects in accordance with the rules on developing standards specified in the ISO/IEC Directives.
Development of International Standards
ITS standardization in ITU-R originated with the proposal of a new Study Question in 1994 and adopted in 1995. Subsequently,
"M.1310", which describes the wireless requirements for ITS, was approved as a recommendation in 1997. This recommendation is a document to describe the architecture of ITS radio communica-tions. Based on this policy, three recommendations were drafted and approved: Functionalities, 60/76 GHz short-range radar, and 5.8 GHz dedicated short range communications.
A study of the millimeter wave ITS communication was dis-cussed and added to the existing recommendation (M.1452) related to the millimeter wave radar, and a revision of the recom-mendation took place in 2012.
Further, through Japan-led efforts, the Land Mobile Handbook Volume 4 (Intelligent Transport Systems) was published in 2007. It contains all the international trends in ITS radio communications.
Currently, to realize systems such as driving safety support system that contributes to reducing traffic accidents, studies on the
application of advanced ITS radio communication systems using road-to-vehicle and vehicle-to-vehicle communications are under-way in Japan, the U.S., and Europe. In light of such trends, Japan proposed replacing Recommendation M.1310 with its own “ITS Guidelines and Objectives”, which became a Recommendation in April 2011. Moreover, Japan has made technical proposals on advanced ITS wireless system using the 700 MHz band and this system was included in the Report ITU-R M.2228 in November 2011.
Since 2013, a new vehicle communications recommendation that reflects the results of the standardization of 700 MHz advanced ITS wireless systems and the European ETSI was pre-pared. In addition, work was also made on a recommendation for high-resolution radars using the 79 GHz band.
The following section describes the background to the creation of the ITS recommendations and outlines the attendant documents.
Standardization of ITS in ITU-R
In the ITS communications field, the International Telecommunications Union (ITU) does standardization work such as preparing recommen-dations. ITU is the United Nations specialized agancy for information and communication technologies whose membership includes 193 Member States, as well as Sector Members and Associates from nearly 800 organizations as of July 2016.
ITU is composed of three sectors: ITU-R (Radio communications), ITU-T (Telecommunications), ITU-D (Telecommunications develop-ment).
ITU-R is involved in the adoption of international regulations and international treaties regarding terrestrial and space (satellite) fre-quency allocation (and the orbital position of geostationary satellites). Countries must establish relevant laws and regulations in accor-
dance with the rules and treaties. Recommendations, which are the basic principles for wireless communications, were created by study groups (SG), which are lower level bodies under ITU-R. The SGs were reorganized in 2007, with SG 5 (Terrestrial services) chosen to handle ITS. Further lower bodies of SG 5 are called WPs (working parties), and WP 5A (Land mobile service above 30 MHz (excluding IMT); wireless access in the fixed service; amateur and amateur-sat-ellite services) is in charge of ITS-related standardization.
ITU-T is also responsible for creating recommendations for research and standardization against the technologies and the usage of telecommunication. ITU-T/ SG 16 (Multimedia) takes its roll in standardization of multimedia related to ITS.
ITS-related standardization in ITUWhat is ITU?
Related Standardization Activities
SR ballot
Revision
Amendment
Minor Revision
TechnicalCorrigendum
Amend/Revise Confirm Withdraw WDRL ballot
Deliverable Max. lifeMax. elapsed time beforesystematic review
Max. number of timesdeliverables may be confirmed
IS 5 years No limit No limit
TS 3 years Once recommended Preferably 6 times
TR Not specified Not specified No limit
PAS3 years
(No default actionby ISO CS)
Once
6 yearsIf not converted after thisperiod, the deliverable isproposed for withdrawal
Target deadlines for standard publication
Timing of systematic reviews
Development stage
Proposal stage NPProposal → Approval
→ RegistrationProposal → Approval
→ RegistrationProposal → Approval
→ Registration
Preparation stage WD - 12 12
Committee stage CD 6 6 12
Enquiry stage DIS 12 12 19
Approval stage FDIS/IS 6 6 5
Document
Fast (24) Standard (36) Prolonged (48)
Target deadline (months)
Conditions for automatically deleting work items- A PWI does not move to the NP stage within 3 years.- No decision on follow-up actions is made within six
months following the DIS or FDIS target deadline.- If DIS approval is not reached within five years after NP
registration.
SR ballot (ballot period: 20 weeks)
When significant corrections are made.The edition number is updated and the standard is reissued.
When partial amendments are added.Only the amended portions are published as a separate document.Maximum of 2 times.
When technical incorrect values are corrected.Only the amended portions are published as a separate document.
When minor changes with no impact on technical contents are made.
Definitions and abbreviationsTC : Technical CommitteeSC : Sub CommitteeWG : Working GroupPWI : Preliminary Work ItemNP : New Work Item ProposalWD : Working DraftCD : Committee DraftDIS : Draft International StandardFDIS : Final Draft International StandardISO : International StandardSR : Systematic ReviewWDRL: WithdrawalTS : Technical Specification
Document published when agreement on an international standard cannot be reached immediately for a standardization item because it is still at the development stage, or for any other reason, even if such agreement is likely to be reached in the future.
PAS : Publicly Available SpecificationIntermediate specification published ahead of the completion of an international standard. Agreement is reached at the NP stage.
TR : Technical ReportDocument containing data different from an international standard. It must not include matter implying that it is normative.
The making process of the recommendations for ITS1994 Question for ITS Drafting of recommendation documents (Answers to the questions)
Present condition of spectrum for ITS
Requirements for spectrum for ITS
Individual technologies
1995
Radiocommunication services
* Rec. ITU-R M. 1453-2 : Newly revised in 2005
- Broadcasting- DSRC (Dedicated short-range communications)- Short-range vehicular radar- Short-range vehicle-to-vehicle communications- Short-range continuous communications- Wide area communications
Objectives and requirements
Functionalities
Short-range vehicular radar
5.8 GHz DSRC
(VICS)
Approved in 1997, Deleted in 2011 : Rec. ITU-R M.1310
Approved in 2000, deleted in 2007 : Rec. ITU-R M.1451
Millimeter-waveITS radiocommunication
Approved in 2000 :Rec. ITU-R M. 1452 *
*Revised in 2012
1996 1997 1998 2009 2010 2011 2012 2013 2014 2015……………………………………ITS-Guidelines and
objectives
Approved in 2011 : Rec. ITU-R M.1890
V2X
79GHz rader
*2015 revision2011:Rep. ITU-R M. 2228
Next generation ITS radiocommunication
Approved in 2000 :Rec. ITU-R M. 1453-2 *
Approved in 2015:Rec. ITU-R M. 2084
Approved in 2014 :Rec. ITU-R M. 2057
Preliminary stage(PWI)
Proposal stage(NP)
Committee stage(CD)
Enquiry stage (DIS)
Publishing stage(ISO)
Approval stage(FDIS)
NP ballot
CD ballot
DIS ballot
Preparation stage(WD)
Agreement to register a PWIProposed to the TC from the WG. Requires TC resolution.
NP registrationForm 4 presented from the proposer to the TC.
CD registrationCompleted WD to be circulated to the TC.CD stage can be skipped by either TC resolution or CIB.
DIS ballot (ballot period: 12 weeks)Approved by agreement of 2/3 or more of votingP-members and less than 1/4 negative votes.TC circulates the result of the voting to the CS (Form 13).
Carried out when the DIS ballot results in a large number of comments leading to technical changes.(Usually skipped.)
Other types of standards
TS : Published by two-thirds majority of voting P-members.PAS : Published by simple majority of voting P-members.TR : Published by simple majority of voting P-members.
CD ballot (ballot period: 8 weeks is standard)Approved by agreement of 2/3 or more of votingP-members.
NP ballot (ballot period : 12 weeks in stadard)Requires agreement by a simple majority of voting P-members and the participation of experts from 5 countries. TC circulates the result of the voting to the CS (Form 6).
A review is performed every 5 years after the standard is issued.After the vote, the next step is determined by Committee decision.
page
48

page
49page
50
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
1 ISO/TR 12859:2009 System architecture -- Privacy aspects in ITS standards and systems ○
1 ISO 14813-1:2015 Reference model architecture(s) for the ITS sector -- Part 1: ITS service domains, service groups and services ○
1 ISO/NP 14813-2 Reference model architecture(s) for the TICS sector -- Part 2: Core TICS reference architecture ○
1 ISO/NP 14813-3 Reference model architecture(s) for the TICS sector -- Part 3: Example elaboration ○
1 ISO/NP 14813-4 Reference model architecture(s) for the TICS sector -- Part 4: Reference model tutorial ○
1 ISO 14813-5:2010 Reference model architecture(s) for the ITS sector -- Part 5: Requirements for architecture description in ITS standards ○
1 ISO/NP 14813-6 Reference model architecture(s) for the ITS sector -- Part 6: Data presentation in ASN.1 ○
1 ISO 14813-6:2009 Reference model architecture(s) for the ITS sector -- Part 6: Data presentation in ASN.1 ○
1 ISO/PWI 14813-7 Reference model architecture(s) for the ITS sector -- Part 7: ITS standards framework ○
1 ISO 14817-1:2015 ITS central data dictionaries -- Part 1: Requirements for ITS data definitions ○
1 ISO 14817-2:2015 ITS central data dictionaries -- Part 2: Governance of the Central ITS Data Concept Registry ○
1 ISO/DIS 14817-3 ITS central data dictionaries -- Part 3: Object identifier assignments for ITS data concepts ○
1 ISO/TR 17452:2007 Using UML for defining and documenting ITS/TICS interfaces ○
1 ISO/TR 17465-1:2014 Cooperative ITS -- Part 1: Terms and definitions ○
1 ISO/TR 17465-2:2015 Cooperative ITS -- Part 2: Guidelines for standards documents ○
1 ISO/TR 17465-3:2015 Cooperative ITS -- Part 3: Release procedures for standards documents ○
1 ISO/DIS 24097-1 Using web services (machine-machine delivery) for ITS service delivery -- Part 1: Realization of interoperable web services ○
1 ISO 24097-1:2009 Using web services (machine-machine delivery) for ITS service delivery -- Part 1: Realization of interoperable web services ○
1 ISO/TR 24097-2:2015 Using web services (machine-machine delivery) for ITS service delivery -- Part 2: Elaboration of interoperable web services' interfaces ○
1 ISO/NP 24097-3 Using web services (machine-machine delivery) for ITS service delivery -- Part 3: Quality of service ○
1 ISO/TR 24098:2007 System architecture, taxonomy and terminology -- Procedures for developing ITS deployment plans utilizing ITS system architecture ○
1 ISO/TR 24529:2008 Systems architecture -- Use of unified modelling language (UML) in ITS International Standards and deliverables ○
1 ISO 24531:2013 System architecture, taxonomy and terminology -- Using XML in ITS standards, data registries and data dictionaries ○
1 ISO/NP 24531-2 System architecture, taxonomy and terminology -- Part 2: Using ASN.1 in ITS standards, data registries and data dictionaries ○
1 ISO/TR 24532:2006 Systems architecture, taxonomy and terminology -- Using CORBA (Common Object Request Broker Architecture) in ITS standards, data registries and data dictionaries ○
1 ISO/TR 25100:2012 Systems architecture -- Harmonization of ITS data concepts ○
1 ISO/TR 25102:2008 System architecture -- 'Use Case' pro-forma template ○
1 ISO/TR 25104:2008 System architecture, taxonomy, terminology and data modelling -- Training requirements for ITS architecture ○
1 ISO/TR 26999:2012 Systems architecture -- Use of process-oriented methodology in ITS International Standards and other deliverables ○
1 ISO/TR 28682:2008 Joint APEC-ISO study of progress to develop and deploy ITS standards ○
3 ISO 14296:2016 Extension of map database specifications for applications of cooperative ITS ○
3 ISO 14825:2011 Geographic Data Files (GDF) -- GDF5.0 ○
3 ISO 17267:2009 Navigation systems -- Application programming interface (API) ○
3 ISO 17572-1 :2015
Intelligent transport systems (ITS) -- Location referencing for geographic databases -- Part 1: General requirements and conceptual model ○
3 ISO/CD 17572-2
Intelligent transport systems (ITS) -- Location referencing for geographic databases -- Part 2: Pre-coded location references (pre-coded profile) ○
3 ISO 17572-2 :2015
Intelligent transport systems (ITS) -- Location referencing for geographic databases -- Part 2: Pre-coded location references (pre-coded profile) ○
3 ISO 17572-3 :2015
Intelligent transport systems (ITS) -- Location referencing for geographic databases -- Part 3: Dynamic location references (dynamic profile) ○
3 ISO/NP 17572-4 Location referencing for geographic databases -- Part 4: Lane-level location referencing ○
ISO/ TC204 List of Work Items and Stages As of June 2016
page
49

page
49page
50
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
3 ISO/TS 17931:2013 Extension of map database specifications for Local Dynamic Map for applications of Cooperative ITS ○
3 ISO/AWI 19297 Shareable geospatial database for ITS applications ○
3 ISO/TS 20452:2007
Requirements and Logical Data Model for a Physical Storage Format (PSF) and an Application Program Interface (API)and Logical Data Organization for PSF used in Intelligent Transport Systems (ITS) Database Technology ○
3 ISO/PWI 20524 Geographic Data Files (GDF) -- GDF5.1 ○
3 ISO/PWI TR 21718 Spatio-temporal data dictionary ○
4 ISO 14814:2006 Road transport and traffic telematics -- Automatic vehicle and equipment identification -- Reference architecture and terminology ○
4 ISO 14815:2005 Road transport and traffic telematics -- Automatic vehicle and equipment identification -- System specifications ○
4 ISO 14816:2005 Road transport and traffic telematics -- Automatic vehicle and equipment identification -- Numbering and data structure ○
4 ISO 14816:2005/CD Amd 1
Road transport and traffic telematics -- Automatic vehicle and equipment identification -- Numbering and data structure -- Amendment 1 ○
4 ISO 17261:2012 Automatic vehicle and equipment identification -- Intermodal goods transport architecture and terminology ○
4 ISO 17262:2012 Automatic vehicle and equipment identification -- Numbering and data structures ○
4 ISO 17262:2012/Cor 1:2013
Automatic vehicle and equipment identification -- Numbering and data structures -- Technical Corrigendum 1 ○
4 ISO 17262:2012/CD Amd 1
Automatic vehicle and equipment identification -- Numbering and data structures -- Amendment 1 ○
4 ISO 17263:2012 Automatic vehicle and equipment identification -- System parameters ○
4 ISO 17263:2012/Cor 1:2013
Automatic vehicle and equipment identification -- System parameters -- Technical Corrigendum 1 ○
4 ISO 17264:2009 Automatic vehicle and equipment identification -- Interfaces ○
4 ISO 17264:2009/CD Amd 1
Automatic vehicle and equipment identification -- Interfaces -- Amendment 1 ○
4 ISO/NP 19061 Automatic vehicle and equipment registration (AVI/AEI) -- Interoperable application profile for AVI/AEI and electronic register identification using dedicated short range communication ○
4 ISO 24534-1:2010 Automatic vehicle and equipment identification -- Electronic registration identification (ERI) for vehicles -- Part 1: Architecture ○
4 ISO 24534-2:2010 Automatic vehicle and equipment identification -- Electronic registration identification (ERI) for vehicles -- Part 2: Operational requirements ○
4 ISO 24534-3:2016 Automatic vehicle and equipment identification -- Electronic registration identification (ERI) for vehicles -- Part 3: Vehicle data ○
4 ISO 24534-4:2010 Automatic vehicle and equipment identification -- Electronic registration identification (ERI) for vehicles -- Part 4: Secure communications using asymmetrical techniques ○
4 ISO 24534-4:2010/CD Amd 1
Automatic vehicle and equipment identification -- Electronic registration identification (ERI) for vehicles -- Part 4: Secure communications using asymmetrical techniques -- Amendment 1 ○
4 ISO 24534-5:2011
Automatic vehicle and equipment identification -- Electronic Registration Identification (ERI) for vehicles -- Part 5: Secure communications using symmetrical techniques ○
4 ISO 24534-5:2011/CD Amd 1
Automatic vehicle and equipment identification -- Electronic Registration Identification (ERI) for vehicles -- Part 5: Secure communications using symmetrical techniques -- Amendment 1 ○
4 ISO 24535:2007 Automatic vehicle identification -- Basic electronic registration identification (Basic ERI) ○
5 ISO 12813:2015 Electronic fee collection -- Compliance check communication for autonomous systems ○
5 ISO 12813:2015/DAmd 1
Electronic fee collection -- Compliance check communication for autonomous systems -- Amendment 1 ○
5 ISO 12855:2015 Electronic fee collection -- Information exchange between service provision and toll charging ○
5 ISO/TS 13140-1:2011
Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO/TS 13141 -- Part 1: Test suite structure and test purposes ○
5 ISO/DIS 13140-1 Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO 13141 -- Part 1: Test suite structure and test purposes ○
5 ISO/TS 13140-2:2012
Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO/TS 13141 -- Part 2: Abstract test suite ○
5 ISO/DIS13140-2
Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to EN ISO 13141 -- Part 2: Abstract test suite ○
5 ISO 13141:2015 Electronic fee collection -- Localisation augmentation communication for autonomous systems ○
5 ISO 13141:2015/DAmd 1
Electronic fee collection -- Localisation augmentation communication for autonomous systems -- Amendment 1 ○
5 ISO/TS 13143-1:2011
Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO/TS 12813 -- Part 1: Test suite structure and test purposes ○
5 ISO/DIS 13143-1 Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO 12813 -- Part 1: Test suite structure and test purposes ○
5 ISO/TS 13143-2:2011
Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to ISO/TS 12813 -- Part 2: Abstract test suite ○
5 ISO/DIS 13143-2 Electronic fee collection -- Evaluation of on-board and roadside equipment for conformity to EN ISO/TS 12813 -- Part 2: Abstract test suite ○
5 ISO/TS14904:2002
Road transport and traffic telematics -- Electronic fee collection (EFC) -- Interface specification for clearing between operators ○
page
50
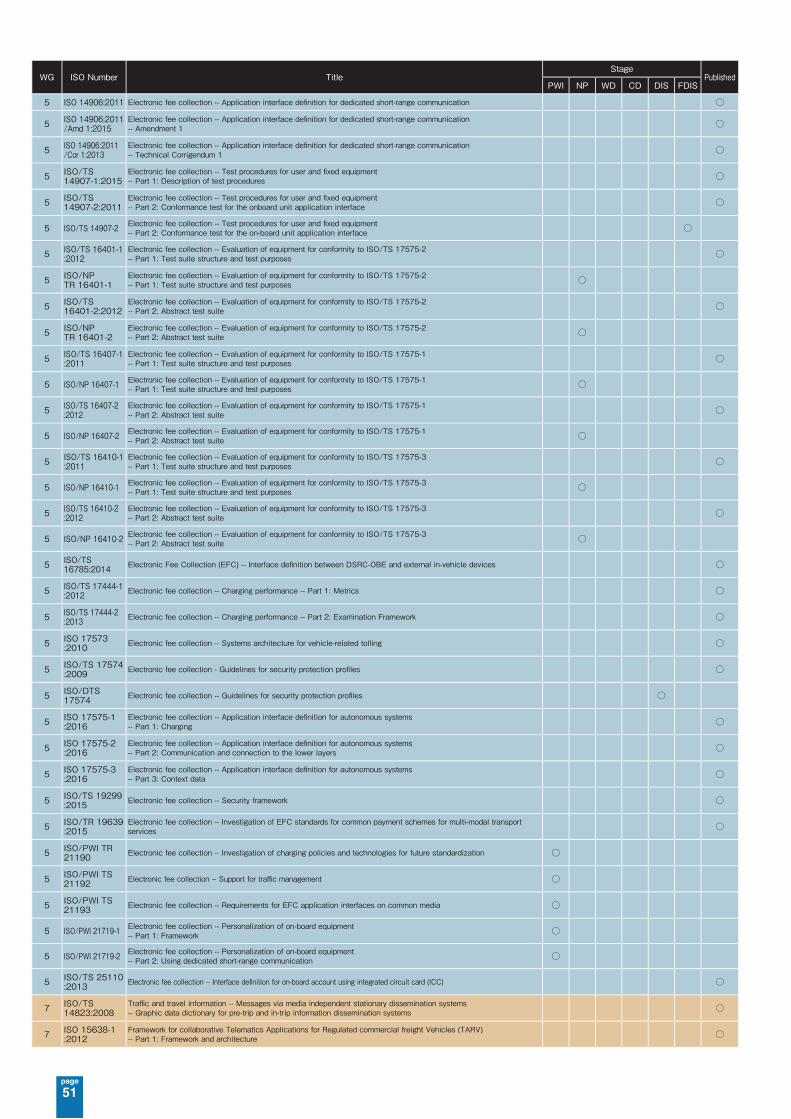
page
51page
52
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
5 ISO 14906:2011 Electronic fee collection -- Application interface definition for dedicated short-range communication ○
5 ISO 14906:2011/Amd 1:2015
Electronic fee collection -- Application interface definition for dedicated short-range communication -- Amendment 1 ○
5 ISO 14906:2011/Cor 1:2013
Electronic fee collection -- Application interface definition for dedicated short-range communication -- Technical Corrigendum 1 ○
5 ISO/TS 14907-1:2015
Electronic fee collection -- Test procedures for user and fixed equipment -- Part 1: Description of test procedures ○
5 ISO/TS14907-2:2011
Electronic fee collection -- Test procedures for user and fixed equipment -- Part 2: Conformance test for the onboard unit application interface ○
5 ISO/TS 14907-2 Electronic fee collection -- Test procedures for user and fixed equipment -- Part 2: Conformance test for the on-board unit application interface ○
5 ISO/TS 16401-1:2012
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-2 -- Part 1: Test suite structure and test purposes ○
5 ISO/NP TR 16401-1
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-2 -- Part 1: Test suite structure and test purposes ○
5 ISO/TS16401-2:2012
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-2 -- Part 2: Abstract test suite ○
5 ISO/NP TR 16401-2
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-2 -- Part 2: Abstract test suite ○
5 ISO/TS 16407-1:2011
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-1 -- Part 1: Test suite structure and test purposes ○
5 ISO/NP 16407-1 Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-1 -- Part 1: Test suite structure and test purposes ○
5 ISO/TS 16407-2:2012
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-1 -- Part 2: Abstract test suite ○
5 ISO/NP 16407-2 Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-1 -- Part 2: Abstract test suite ○
5 ISO/TS 16410-1:2011
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-3 -- Part 1: Test suite structure and test purposes ○
5 ISO/NP 16410-1 Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-3 -- Part 1: Test suite structure and test purposes ○
5 ISO/TS 16410-2:2012
Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-3 -- Part 2: Abstract test suite ○
5 ISO/NP 16410-2 Electronic fee collection -- Evaluation of equipment for conformity to ISO/TS 17575-3 -- Part 2: Abstract test suite ○
5 ISO/TS 16785:2014 Electronic Fee Collection (EFC) -- Interface definition between DSRC-OBE and external in-vehicle devices ○
5 ISO/TS 17444-1:2012 Electronic fee collection -- Charging performance -- Part 1: Metrics ○
5 ISO/TS 17444-2:2013 Electronic fee collection -- Charging performance -- Part 2: Examination Framework ○
5 ISO 17573:2010 Electronic fee collection -- Systems architecture for vehicle-related tolling ○
5 ISO/TS 17574:2009 Electronic fee collection - Guidelines for security protection profiles ○
5 ISO/DTS 17574 Electronic fee collection -- Guidelines for security protection profiles ○
5 ISO 17575-1:2016
Electronic fee collection -- Application interface definition for autonomous systems -- Part 1: Charging ○
5 ISO 17575-2:2016
Electronic fee collection -- Application interface definition for autonomous systems -- Part 2: Communication and connection to the lower layers ○
5 ISO 17575-3:2016
Electronic fee collection -- Application interface definition for autonomous systems -- Part 3: Context data ○
5 ISO/TS 19299:2015 Electronic fee collection -- Security framework ○
5 ISO/TR 19639:2015
Electronic fee collection -- Investigation of EFC standards for common payment schemes for multi-modal transport services ○
5 ISO/PWI TR21190 Electronic fee collection -- Investigation of charging policies and technologies for future standardization ○
5 ISO/PWI TS 21192 Electronic fee collection -- Support for traffic management ○
5 ISO/PWI TS 21193 Electronic fee collection -- Requirements for EFC application interfaces on common media ○
5 ISO/PWI 21719-1 Electronic fee collection -- Personalization of on-board equipment -- Part 1: Framework ○
5 ISO/PWI 21719-2 Electronic fee collection -- Personalization of on-board equipment -- Part 2: Using dedicated short-range communication ○
5 ISO/TS 25110:2013 Electronic fee collection -- Interface definition for on-board account using integrated circuit card (ICC) ○
7 ISO/TS14823:2008
Traffic and travel information -- Messages via media independent stationary dissemination systems -- Graphic data dictionary for pre-trip and in-trip information dissemination systems ○
7 ISO 15638-1:2012
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 1: Framework and architecture ○
page
51

page
51page
52
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
7 ISO 15638-2:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 2: Common platform parameters using CALM ○
7 ISO 15638-3:2013
Framework for collaborative telematics applications for regulated commercial freight vehicles (TARV) -- Part 3: Operating requirements, 'Approval Authority' procedures, and enforcement provisions for the providers of regulated services ○
7 ISO 15638-5:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 5: Generic vehicle information ○
7 ISO 15638-6:2014
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 6: Regulated applications ○
7 ISO 15638-7:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 7: Other applications ○
7 ISO 15638-8:2014 Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 8: Vehicle access management ○
7 ISO/TS 15638-9:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 9: Remote electronic tachograph monitoring (RTM) ○
7 ISO/DIS 15638-9
Framework for cooperative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 9: Remote electronic tachograph monitoring (RTM) ○
7 ISO/TS 15638-10:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 10: Emergency messaging system/eCall (EMS) ○
7 ISO/DIS 15638-10
Framework for cooperative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 10: Emergency messaging system/eCall (EMS) ○
7 ISO 15638-11:2014
Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 11: Driver work records ○
7 ISO 15638-12:2014 Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 12: Vehicle mass monitoring ○
7 ISO/TS 15638-13:2015
Framework for cooperative telematics applications for regulated commercial freight vehicles (TARV) -- Part 13: "Mass" information for jurisdictional control and enforcement ○
7 ISO 15638-14:2014 Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 14: Vehicle access control ○
7 ISO 15638-15:2014 Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 15: Vehicle location monitoring ○
7 ISO 15638-16:2014
Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 16: Vehicle speed monitoring ○
7 ISO 15638-17:2014
Framework for cooperative telematics applications for regulated vehicles (TARV) -- Part 17: Consignment and location monitoring ○
7 ISO/TS 15638-18:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 18: ADR (Dangerous Goods) transport monitoring (ADR) ○
7 ISO/DIS 15638-18
Framework for cooperative telematics applications for regulated commercial freight Vehicles (TARV) -- Part 18: ADR (Dangerous Goods) ○
7 ISO/TS 15638-19:2013
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 19: Vehicle parking facilities (VPF) ○
7 ISO/AWI 15638-20
Framework for collaborative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 20: Weigh in motion (WIM) ○
7 ISO/AWI 15638-21
Framework for cooperative Telematics Applications for Regulated commercial freight Vehicles (TARV) -- Part 21: Monitoring of regulated vehicles using roadside sensors and data collected from the vehicle for enforcement and other purposes ○
7 ISO/TS 17187:2013
Electronic information exchange to facilitate the movement of freight and its intermodal transfer -- Governance rules to sustain electronic information exchange methods ○
7 ISO 17687:2007
Transport Information and Control Systems (TICS) -- General fleet management and commercial freight operations -- Data dictionary and message sets for electronic identification and monitoring of hazardous materials/dangerous goods transportation ○
7 ISO 18495-1 Commercial freight -- Automotive visibility in the distribution supply chain -- Part 1: Architecture and data definitions ○
7 ISO/TS 24533:2012
Electronic information exchange to facilitate the movement of freight and its intermodal transfer -- Road transport information exchange methodology ○
7 ISO/NP 24533 Electronic information exchange to facilitate the movement of freight and its intermodal transfer -- Road transport information exchanges for supply chain time-sensitive delivery (road - air freight - road) ○
7 ISO 26683-1:2013 Freight land conveyance content identification and communication -- Part 1: Context, architecture and referenced standards ○
7 ISO 26683-2:2013
Freight land conveyance content identification and communication -- Part 2: Application interface profiles ○
7 ISO/NP 26683-3
Freight land conveyance content identification and communication -- Part 3: Monitoring cargo condition information during transport ○
8 ISO/TR 14806:2013 Public transport requirements for the use of payment applications for fare media ○
8 ISO 17185-1:2014
Public transport user information -- Part 1: Standards framework for public information systems ○
8 ISO/TR 17185-2:2015
Public transport user information -- Part 2: Public transport data and interface standards catalogue and cross references ○
8 ISO/TR 17185-3:2015
Public transport user information -- Part 3: Use cases for journey planning systems and their interoperation ○
8 ISO/NP 17185-4 Public transport user information -- Part 4: Use cases for mobility journey planning systems and their inter-operation ○
8 ISO/NP 17185-5 Part 5: Governance of mandatory public transport standards ○
8 ISO/NP 17185-6 Part 6: Modelling stops and network topology ○
8 ISO/NP 17185-7 Part 7: Conformance test of interoperable fare management system (ISO 24014-1) ○
page
52

page
53page
54
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
8 ISO/NP 17185-8 Part 8: Framework message architecture ○
8 ISO/DTR 19083-1 Public transport -- Emergency evacuation and disaster response and recovery -- Part 1: Framework ○
8 ISO/AWI 19083-2 Public transport -- Emergency evacuation and disaster response and recovery -- Part 2: Data flow ○
8 ISO/NP 19083-3 Public transport -- Emergency evacuation and disaster response and recovery -- Part 3: Use cases ○
8 ISO/PWI TR 19415 Public transport - Conformance test guidelines of fare media and reader in public transport ○
8 ISO/AWI 20526 Public transport -- Account-based ticketing standards requirements ○
8 ISO/NP 20527 Interoperability between IFM systems and NFC mobile devices ○
8 ISO/PWI 20528 Standard identifier formats for public transport media ○
8 ISO/PWI 20989 Public transport -- Conformance testing for fare management systems ○
8 ISO/PWI 21344 Public transport - Emergency services E-Call device for emergency on connected vehicles using ITS station ○
8 ISO/PWI 21345 Charging infrastructure for public transport electric bus for Bus Rapid Transit (BRT) applications ○
8 ISO/NP TR 21724-1 Common transport service account systems -- Part 1: Framework and use cases ○
8 ISO/PWI 21733 Public transport -- Synchronization of terminology and role models ○
8 ISO/PWI 21734 Public transport -- Performance testing for connectivity and safety functions of automated driving bus ○
8 ISO 22951:2009
Data dictionary and message sets for preemption and prioritization signal systems for emergency and public transport vehicles (PRESTO) ○
8 ISO 24014-1:2015
Public transport -- Interoperable fare management system -- Part 1: Architecture ○
8 ISO/TR24014-2:2013
Public transport -- Interoperable fare management system -- Part 2: Business practices ○
8 ISO/TR24014-3:2013
Public transport -- Interoperable fare management system -- Part 3: Complementary concepts to Part 1 for multi-application media ○
9 ISO 10711:2012 Interface Protocol and Message Set Definition between Traffic Signal Controllers and Detectors ○
9 ISO 14827-1:2005
Data interfaces between centres for transport information and control systems Part 1: Message definition requirements ○
9 ISO 14827-2:2005
Data interfaces between centres for transport information and control systems Part 2: DATEX-ASN ○
9 ISO/DIS 14827-3 Data interfaces between centres for transport information and control systems Part 3: Data interfaces between centres for Intelligent Transport Sytems (ITS) using XML ○
9 ISO 15784-1:2008
Data exchange involving roadside modules communication -- Part 1: General principles and documentation framework of application profiles ○
9 ISO 15784-2:2015
Data exchange involving roadside modules communication -- Part 2: Centre to field device communications using SNMP ○
9 ISO 15784-3:2008
Data exchange involving roadside modules communication -- Part 3: Application profile-data exchange (AP-DATEX) ○
9 ISO/TR 16786:2015
The use of simulation models for evaluation of traffic management systems -- Input parameters and reporting template for simulation of traffic signal control systems ○
9 ISO/AWI 19082 Definition of data elements and data frames between roadside units and signal controllers for cooperative signal control ○
9 ISO/PWI 19404 Architecture of signal control systems utilizing information collected by vehicle-to-infrastructure communication ○
9 ISO/NP TS 19468
Data interfaces between centres for transport information and control systems -- Platform independent model specifications for data exchange protocols for transport information and control systems ○
9 ISO/PWI 20684-1 Roadside modules data interface -- Part 1: Generalized field device ○
9 ISO/AWI 20684-2 Roadside modules data interface -- Part 2: Variable message signs ○
9 ISO/TR 21707:2008 Integrated transport information, management and control -- Data quality in ITS systems ○
10 ISO 14819-1:2013
Traffic and travel information messages via traffic message coding -- Part 1: Coding protocol for Radio Data System -- Traffic Message Channel (RDS-TMC) using ALERT-C ○
10 ISO 14819-2:2013
Traffic and travel information messages via traffic message coding -- Part 2: Event and information codes for Radio Data System -- Traffic Message Channel (RDS-TMC) using ALERT-C ○
10 ISO 14819-3:2013
Traffic and travel information messages via traffic message coding -- Part 3: Location referencing for Radio Data System -- Traffic Message Channel (RDS-TMC) using ALERT-C ○
10 ISO 14819-6:2006
Traffic and Traveller Information (TTI) -- TTI messages via traffic message coding -- Part 6: Encryption and conditional access for the Radio Data System -- Traffic Message Channel ALERT C coding ○
10 ISO/DIS 14823 Graphic data dictionary ○
10 ISO/TS 18234-1:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 1: Introduction, numbering and versions (TPEG1-INV) ○
10 ISO/TS 18234-2:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 2: Syntax, semantics and framing structure (TPEG1-SSF) ○
10 ISO/TS 18234-3:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 3: Service and network information (TPEG1-SNI) ○
10 ISO/TS 18234-4:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Expert Group (TPEG) data-streams -- Part 4: Road Traffic Message (RTM) application ○
10 ISO/TS 18234-5:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Expert Group (TPEG) data-streams -- Part 5: Public Transport Information (PTI) application ○
page
53
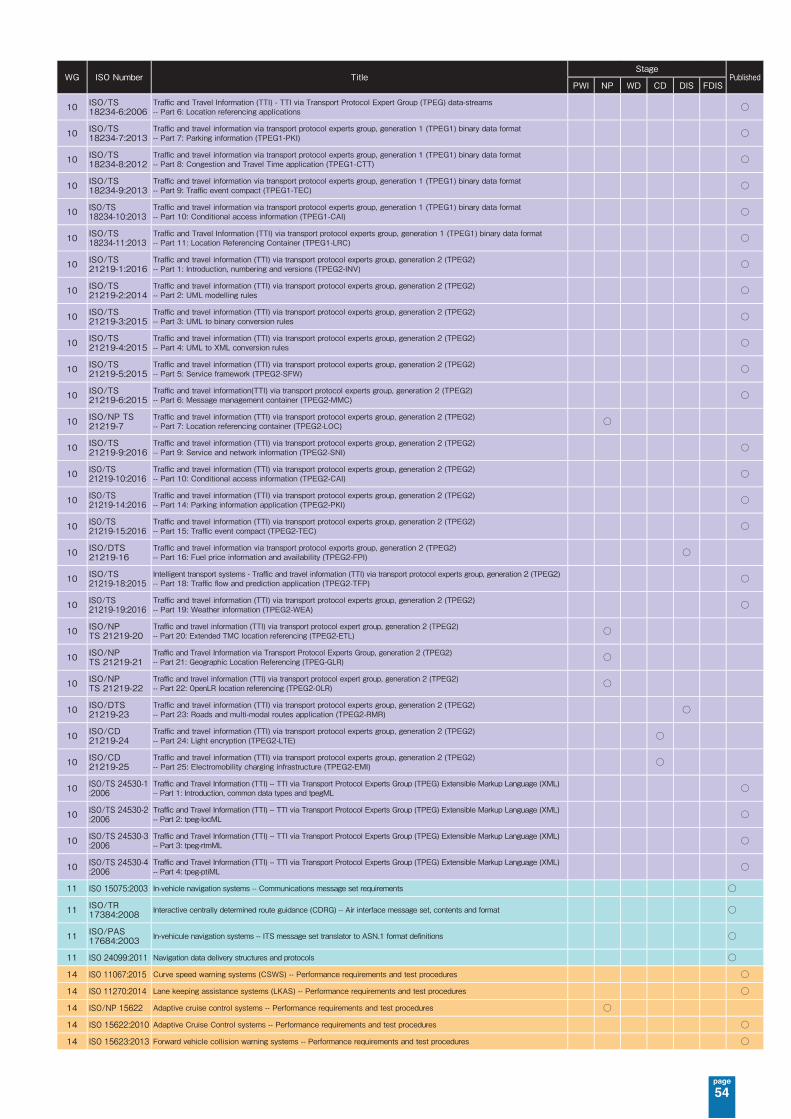
page
53page
54
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
10 ISO/TS 18234-6:2006
Traffic and Travel Information (TTI) - TTI via Transport Protocol Expert Group (TPEG) data-streams -- Part 6: Location referencing applications ○
10 ISO/TS 18234-7:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 7: Parking information (TPEG1-PKI) ○
10 ISO/TS 18234-8:2012
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 8: Congestion and Travel Time application (TPEG1-CTT) ○
10 ISO/TS 18234-9:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 9: Traffic event compact (TPEG1-TEC) ○
10 ISO/TS 18234-10:2013
Traffic and travel information via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 10: Conditional access information (TPEG1-CAI) ○
10 ISO/TS 18234-11:2013
Traffic and Travel Information (TTI) via transport protocol experts group, generation 1 (TPEG1) binary data format -- Part 11: Location Referencing Container (TPEG1-LRC) ○
10 ISO/TS 21219-1:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 1: Introduction, numbering and versions (TPEG2-INV) ○
10 ISO/TS 21219-2:2014
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 2: UML modelling rules ○
10 ISO/TS 21219-3:2015
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 3: UML to binary conversion rules ○
10 ISO/TS 21219-4:2015
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 4: UML to XML conversion rules ○
10 ISO/TS 21219-5:2015
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 5: Service framework (TPEG2-SFW) ○
10 ISO/TS 21219-6:2015
Traffic and travel information(TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 6: Message management container (TPEG2-MMC) ○
10 ISO/NP TS 21219-7
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 7: Location referencing container (TPEG2-LOC) ○
10 ISO/TS 21219-9:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 9: Service and network information (TPEG2-SNI) ○
10 ISO/TS 21219-10:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 10: Conditional access information (TPEG2-CAI) ○
10 ISO/TS 21219-14:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 14: Parking information application (TPEG2-PKI) ○
10 ISO/TS 21219-15:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 15: Traffic event compact (TPEG2-TEC) ○
10 ISO/DTS 21219-16
Traffic and travel information via transport protocol exports group, generation 2 (TPEG2) -- Part 16: Fuel price information and availability (TPEG2-FPI) ○
10 ISO/TS 21219-18:2015
Intelligent transport systems - Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 18: Traffic flow and prediction application (TPEG2-TFP) ○
10 ISO/TS 21219-19:2016
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 19: Weather information (TPEG2-WEA) ○
10 ISO/NP TS 21219-20
Traffic and travel information (TTI) via transport protocol expert group, generation 2 (TPEG2) -- Part 20: Extended TMC location referencing (TPEG2-ETL) ○
10 ISO/NP TS 21219-21
Traffic and Travel Information via Transport Protocol Experts Group, generation 2 (TPEG2) -- Part 21: Geographic Location Referencing (TPEG-GLR) ○
10 ISO/NP TS 21219-22
Traffic and travel information (TTI) via transport protocol expert group, generation 2 (TPEG2) -- Part 22: OpenLR location referencing (TPEG2-OLR) ○
10 ISO/DTS21219-23
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 23: Roads and multi-modal routes application (TPEG2-RMR) ○
10 ISO/CD21219-24
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 24: Light encryption (TPEG2-LTE) ○
10 ISO/CD21219-25
Traffic and travel information (TTI) via transport protocol experts group, generation 2 (TPEG2) -- Part 25: Electromobility charging infrastructure (TPEG2-EMI) ○
10 ISO/TS 24530-1:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Experts Group (TPEG) Extensible Markup Language (XML) -- Part 1: Introduction, common data types and tpegML ○
10 ISO/TS 24530-2:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Experts Group (TPEG) Extensible Markup Language (XML) -- Part 2: tpeg-locML ○
10 ISO/TS 24530-3:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Experts Group (TPEG) Extensible Markup Language (XML) -- Part 3: tpeg-rtmML ○
10 ISO/TS 24530-4:2006
Traffic and Travel Information (TTI) -- TTI via Transport Protocol Experts Group (TPEG) Extensible Markup Language (XML) -- Part 4: tpeg-ptiML ○
11 ISO 15075:2003 In-vehicle navigation systems -- Communications message set requirements ○
11 ISO/TR 17384:2008 Interactive centrally determined route guidance (CDRG) -- Air interface message set, contents and format ○
11 ISO/PAS 17684:2003 In-vehicule navigation systems -- ITS message set translator to ASN.1 format definitions ○
11 ISO 24099:2011 Navigation data delivery structures and protocols ○
14 ISO 11067:2015 Curve speed warning systems (CSWS) -- Performance requirements and test procedures ○
14 ISO 11270:2014 Lane keeping assistance systems (LKAS) -- Performance requirements and test procedures ○
14 ISO/NP 15622 Adaptive cruise control systems -- Performance requirements and test procedures ○
14 ISO 15622:2010 Adaptive Cruise Control systems -- Performance requirements and test procedures ○
14 ISO 15623:2013 Forward vehicle collision warning systems -- Performance requirements and test procedures ○
page
54

page
55page
56
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
14 ISO/TS 15624:2001 Traffic Impediment Warning Systems (TIWS) -- System requirements ○
14 ISO/DIS 16787 Assisted Parking System (APS) - Performance requirements and test procedures ○
14 ISO 17361:2007 Lane departure warning systems -- Performance requirements and test procedures ○
14 ISO 17386:2010 Manoeuvring Aids for Low Speed Operation (MALSO) -- Performance requirements and test procedures ○
14 ISO 17387:2008 Lane change decision aid systems (LCDAS) -- Performance requirements and test procedures ○
14 ISO/DIS 18682 External hazard detection and notification systems -- Basic requirements ○
14 ISO/CD 19237 Pedestrian detection and collision mitigation systems (PDCMS) -- Performance requirements and test procedures ○
14 ISO/AWI 19638 Road Boundary Departure Prevention Systems (RBDPS) -- Performance requirements and test procedures ○
14 ISO/AWI 20035 Cooperative adaptive cruise control (CACC) -- Operation, performance and verification requirements ○
14 ISO/CD TR 20545
Vehicle/roadway warning and control systems -- Report on standardisation for vehicle automated driving systems (RoVAS)/Beyond driver assistance systems ○
14 ISO/PWI 20900 Partially automated parking systems-level 2 (PAPS) -- Performance requirements and test procedures ○
14 ISO/PWI 20901 Cooperative forward vehicle emergency brake warning system (C-FVBWS) -- Use case, performance requirements and test procedures ○
14 ISO/PWI 21202 Partially Automated Lane Change Systems (PALS) -- Functional / operational requirements and test procedures ○
14 ISO/PWI 21717 Partially automated in-lane driving systems (PADS) -- Performance requirements and test procedures ○
14 ISO 22178:2009 Low speed following (LSF) systems -- Performance requirements and test procedures ○
14 ISO/CD 22179 Generic adaptive cruise control systems -- Performance requirements and test procedures ○
14 ISO 22179:2009 Full speed range adaptive cruise control (FSRA) systems -- Performance requirements and test procedures ○
14 ISO 22839:2013 Forward vehicle collision mitigation systems -- Operation, performance, and verification requirements ○
14 ISO 22840:2010 Devices to aid reverse manoeuvres -- Extended-range backing aid systems (ERBA) ○
14 ISO 26684:2015
Cooperative intersection signal information and violation warning systems (CIWS) -- Performance requirements and test procedures ○
16 ISO/TR 11766:2010 Communications access for land mobiles (CALM) -- Security considerations for lawful interception ○
16 ISO/TR 11769:2010 Communications access for land mobiles (CALM) -- Data retention for law enforcement ○
16 ISO 13183:2012 Communications access for land mobiles (CALM) -- Using broadcast communications ○
16 ISO 15628:2013 Dedicated short range communication (DSRC) -- DSRC application layer ○
16 ISO 15662:2006 Wide area communication -- Protocol management information ○
16 ISO/PRF TS 16460 Communications access for land mobiles (CALM) -- Communication protocol messages for global usage ○
16 ISO/AWI 16461 Criteria for privacy and integrity protection in probe vehicle information systems ○
16 ISO/PWI 16788 Communications access for land mobiles (CALM) -- IPv6 Networking Security ○
16 ISO/NP 16789 Communications access for land mobiles (CALM) -- IPv6 Networking Optimisation ○
16 ISO 17515-1:2015
Communications access for land mobiles (CALM) -- Evolved Universal Terrestrial Radio Access Network (E-UTRAN) -- Part 1: General usage ○
16 ISO/AWI 17515-2
Communications access for land mobiles (CALM) -- Evolved-universal terrestrial radio access network (E-UTRAN) -- Part 2: Device to device communications (D2D) ○
16 ISO/AWI TR 18317 Pre-emption of ITS communication networks for disaster relief and emergency communications ○
16 ISO/NP 18376 Criteria for Privacy and Integrity protection in Probe Vehicle Information Systems ○
16 ISO/NP 18378 Communications access for land mobiles (CALM) - Multicast ○
16 ISO/NP 18380 Communications access for land mobiles (CALM) - IPv4-IPv6 interoperability ○
16 ISO/DIS 19079 Communications access for land mobiles (CALM) -- 6LoWPAN networking ○
16 ISO/DIS 19080 Communications access for land mobiles (CALM) - CoAP facility ○
16 ISO/PWI 19405 Communications access for land mobiles (CALM) - IPv6 over low power wireless personal area networks (6LowPAN) ○
16 ISO/PWI 19406 Communications access for land mobiles (CALM) - Constrained application protocol (CoAP) ○
16 ISO/AWI 19414 Service architecture of probe vehicle systems ○
16 ISO 21210:2012 Communications access for land mobiles (CALM) -- IPv6 Networking ○
16 ISO 21210:2012/DAmd 1 Communications access for land mobiles (CALM) -- IPv6 Networking -- Amendment 1 ○
16 ISO 21212:2008 Communications access for land mobiles (CALM) -- 2G Cellular systems ○
16 ISO 21213:2008 Communications access for land mobiles (CALM) -- 3G Cellular systems ○
16 ISO 21214:2015 Communications access for land mobiles (CALM) -- Infra-red systems ○
16 ISO/AWI 21215 Communications access for land mobiles (CALM) -- M5 ○
16 ISO 21215:2010 Communications access for land mobiles (CALM) -- M5 ○
16 ISO 21216:2012 Communication access for land mobiles (CALM) -- Millimetre wave air interface ○
16 ISO/AWI 21216-1 Communication -- Part 1: Millimetre wave air interface ○
16 ISO/AWI 21216-2 Communication -- Part 2: Millimetre wave data link layer ○
16 ISO 21217:2014 Communications access for land mobiles (CALM) -- Architecture ○
page
55

page
55page
56
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
16 ISO 21218:2013 Communications access for land mobiles (CALM) -- Access technology support ○
16 ISO 21218:2013/Amd 1:2014 Communications access for land mobiles (CALM) -- Access technology support -- Amendment 1 ○
16 ISO 22837:2009 Vehicle probe data for wide area communications ○
16 ISO/NP 22837 Vehicle probe data for wide area communications ○
16 ISO 24100:2010 Basic principles for personal data protection in probe vehicle information services ○
16 ISO/NP 24100 Basic principles for personal data protection in probe vehicle information services ○
16 ISO 24101-1:2008
Communications access for land mobiles (CALM) -- Application management -- Part 1: General requirements ○
16 ISO 24101-2:2010
Communications access for land mobiles (CALM) -- Application management -- Part 2: Conformance test ○
16 ISO 24102-1:2013
Communications access for land mobiles (CALM) -- ITS station management -- Part 1: Local management ○
16 ISO 24102-1:2013/DAmd 1
Communications access for land mobiles (CALM) -- ITS station management -- Part 1: Local management -- Amendment 1 ○
16 ISO 24102-2:2015
Communications access for land mobiles (CALM) -- ITS station management -- Part 2: Remote management of ITS-SCUs ○
16 ISO 24102-3:2013
Communications access for land mobiles (CALM) -- ITS station management -- Part 3: Service access points ○
16 ISO 24102-3:2013/DAmd 1
Communications access for land mobiles (CALM) -- ITS station management -- Part 3: Service access points -- Amendment 1 ○
16 ISO 24102-4:2013
Communications access for land mobiles (CALM) -- ITS station management -- Part 4: Station-internal management communications ○
16 ISO 24102-4:2013/DAmd 1
Communications access for land mobiles (CALM) -- ITS station management -- Part 4: Station-internal management communications -- Amendment 1 ○
16 ISO 24102-5:2013
Communications access for land mobiles (CALM) -- ITS station management -- Part 5: Fast service advertisement protocol (FSAP) ○
16 ISO 24102-5:2013/DAmd 1
Communications access for land mobiles (CALM) -- ITS station management -- Part 5: Fast service advertisement protocol (FSAP) -- Amendment 1 ○
16 ISO/AWI 24102-5
Communications access for land mobiles (CALM) -- ITS station management -- Part 5: Fast service advertisement protocol (FSAP) ○
16 ISO/DIS 24102-6
Communications access for land mobiles (CALM) -- ITS station management -- Part 6: Path and flow management ○
16 ISO 24103:2009 Communications access for land mobiles (CALM) -- Media adapted interface layer (MAIL) ○
16 ISO 24978:2009 ITS Safety and emergency messages using any available wireless media -- Data registry procedures ○
16 ISO 25111:2009 Communications access for land mobiles (CALM) -- General requirements for using public networks ○
16 ISO 25112:2010 Communications access for land mobiles (CALM) -- Mobile wireless broadband using IEEE 802.16 ○
16 ISO 25113:2010 Communications access for land mobiles (CALM) -- Mobile wireless broadband using HC-SDMA ○
16 ISO/NP TS 25114 Probe data reporting management (PDRM) ○
16 ISO/TS 25114:2010 Probe data reporting management (PDRM) ○
16 ISO 29281-1:2013
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 1: Fast networking & transport layer protocol (FNTP) ○
16 ISO 29281-1:2013/DAmd 1
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 1: Fast networking & transport layer protocol (FNTP) -- Amendment 1 ○
16 ISO/AWI 29281-1
Communication access for land mobiles (CALM) -- Non-IP communications -- Part 1: Fast networking & transport protocol (FNTP) ○
16 ISO/PWI 29281-1
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 1: Fast networking & transport layer protocol (FNTP) ○
16 ISO 29281-2:2013
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 2: Legacy system support ○
16 ISO 29281-2:2013/Amd 1:2014
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 2: Legacy system support -- Amendment 1 ○
16 ISO/PWI 29281-2
Communication access for land mobiles (CALM) -- Non-IP networking -- Part 2: Legacy system support ○
16 ISO 29282:2011 Communications access for land mobiles (CALM) -- Satellite networks ○
16 ISO 29283:2011 ITS CALM Mobile Wireless Broadband applications using Communications in accordance with IEEE 802.20 ○
16 ISO/TS 29284:2012 Event-based probe vehicle data ○
17 ISO/TR 10992:2011 Use of nomadic and portable devices to support ITS service and multimedia provision in vehicles ○
17 ISO/NP TR 10992-2
Use of nomadic and portable devices to support ITS service and multimedia provision in vehicles -- Part 2: Definition and use cases for mobile service convergence ○
17 ISO/DIS 13111-1
The use of personal ITS station to support ITS service provision for travelers -- Part 1: General information and use cases definitions ○
17 ISO/PWI 13111-2
The use of personal ITS station to support ITS service provision for travelers -- Part 2: General requirements for data exchange between personal ITS station and other ITS stations ○
17 ISO/TR 13184-1:2013
Guidance protocol via personal ITS station for advisory safety systems -- Part 1: General information and use case definitions ○
17 ISO 13184-2:2016
Guidance protocol via personal ITS station for advisory safety systems -- Part 2: Road guidance protocol (RGP) requirements and specification ○
page
56

page
57page
58
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
17 ISO/NP 13184-3
Guidance protocol via personal ITS station for advisory safety systems -- Part 3: Protocol conformance test cases ○
17 ISO/TR 13185-1:2012
Vehicle interface for provisioning and support of ITS services -- Part 1: General information and use case definition ○
17 ISO 13185-2:2015
Vehicle interface for provisioning and support of ITS services -- Part 2: Unified gateway protocol (UGP) requirements and specification for vehicle ITS station gateway (V-ITS-SG) interface
○
17 ISO/CD 13185-3
Vehicle interface for provisioning and support of ITS Services -- Part 3: Unified gateway protocol (UGP) server and client API specification ○
17 ISO 17438-1:2016
Indoor navigation for personal and vehicle ITS station -- Part 1: General information and use case definition ○
17 ISO/NP 17438-2
Indoor navigation for personal and vehicle ITS stations -- Part 2: TBD ○
17 ISO/NP 17438-3
Indoor navigation for personal and vehicle ITS stations -- Part 3: TBD ○
17 ISO/AWI 17438-4
Indoor navigation for personal and vehicle ITS stations -- Part 4: Requirements and specification for interface between Personal/Vehicle and Central ITS stations ○
17 ISO/CD TR 18561-1
The use of personal ITS station for green transport information and management -- Part 1: General information and use cases definition ○
17 ISO/PWI 20529 Framework for Green ITS (G-ITS) standards ○
17 ISO/PWI 20529-2 Framework for green ITS (G-ITS) standards -- Part 2: Integrated mobile service application and use case definition ○
17 ISO/NP 20530 Information for emergency service support via personal ITS station -- General requirements and technical definition ○
17 ISO/PWI 21735 Framework architecture for plug & play (PnP) vehicles utilizing nomadic devices ○
18 ISO/TS 17419:2014 Cooperative systems -- Classification and management of ITS applications in a global context ○
18 ISO/AWI 17419 Cooperative ITS - Classification and management of ITS applications in a global context ○
18 ISO/TS 17423:2014 Cooperative systems -- ITS application requirements and objectives for selection of communication profiles ○
18 ISO/NP 17423 Cooperative systems -- ITS application requirements and objectives for selection of communication profiles ○
18 ISO/TR 17424:2015 Cooperative systems -- State of the art of Local Dynamic Maps concepts ○
18 ISO/TS 17425:2016 Cooperative systems -- Data exchange specification for in-vehicle presentation of external road and traffic related data ○
18 ISO/TS 17426:2016 Cooperative systems -- Contextual speeds ○
18 ISO/TS 17427:2014
Cooperative systems -- Roles and responsibilities in the context of cooperative ITS based on architecture(s) for coop-erative systems ○
18 ISO/NP 17427-1 Cooperative ITS -- Part 1: Roles and responsibilities in the context of co-operative ITS architecture(s) ○
18 ISO/TR 17427-2:2015 Cooperative ITS -- Part 2: Framework overview ○
18 ISO/TR 17427-3:2015 Cooperative ITS -- Part 3: Concept of operations (ConOps) for 'core' systems ○
18 ISO/TR 17427-4:2015 Cooperative ITS -- Part 4: Minimum system requirements and behaviour for core systems ○
18 ISO/CD TR 17427-5 Cooperative ITS -- Part 5: Common approaches to security ○
18 ISO/TR 17427-6:2015 Cooperative ITS -- Part 6: 'Core system' risk assessment methodology ○
18 ISO/TR 17427-7:2015 Cooperative ITS -- Part 7: Privacy aspects ○
18 ISO/TR 17427-8:2015 Cooperative ITS -- Part 8: Liability aspects ○
18 ISO/TR 17427-9:2015 Cooperative ITS -- Part 9: Compliance and enforcement aspects ○
18 ISO/TR 17427-10:2015 Cooperative ITS -- Part 10: Driver distraction and information display ○
18 ISO/CD TR 17427-12 Cooperative ITS -- Part 12: Release processes ○
18 ISO/CD TR 17427-13 Cooperative ITS -- Part 13: Use case test cases ○
18 ISO/CD TR 17427-14 Cooperative ITS -- Part 14: Maintenance requirements and processes ○
18 ISO/PRF TS 17429 Cooperative ITS -- ITS station facilities for the transfer of information between ITS stations ○
18 ISO/TS 18750:2015 Cooperative systems -- Definition of a global concept for Local Dynamic Maps ○
18 ISO/NP 18750 Cooperative ITS -- Local dynamic maps ○
18 ISO/PRF TS 19091 Cooperative ITS -- Using V2I and I2V communications for applications related to signalized intersections ○
18 ISO/TS 19321:2015 Cooperative ITS -- Dictionary of in-vehicle information (IVI) data structures ○
18 ISO/PWI 19416 Cooperative ITS - Using I2V communications for applications related to in-vehicle information (IVI) ○
18 ISO/PWI 20025 Cooperative ITS -- Representative probe data use cases and related gaps in existing probe data standards ○
page
57

page
57page
58
WG ISO Number TitleStage
PublishedPWI NP WD CD DIS FDIS
18 ISO/AWI TS 20026 Cooperative ITS -- Test architecture ○
18 ISO/NP TS 20594-1
Cooperative systems -- Test specifications for TS 17429 -- Part 1: Protocol implementation conformance statement (PICS) proforma ○
18 ISO/NP TS 20594-2
Cooperative systems -- Test specifications for TS 17429 -- Part 2: Test suite structure and test purposes (TSS&TP) ○
18 ISO/NP TS 20594-3
Cooperative systems -- Test specifications for TS 17429 -- Part 3: Abstract test suite (ATS) and partial PIXIT proforma ○
18 ISO/NP TS 20597-1
Cooperative systems -- Test specifications for TS 19321 -- Part 1: Protocol implementation conformance statement (PICS) proforma ○
18 ISO/NP TS 20597-2
Cooperative systems -- Test specifications for TS 19321 -- Part 2: Test suite structure and test purposes (TSS&TP) ○
18 ISO/NP TS 20597-3
Cooperative systems -- Test specifications for TS 19321 -- Part 3: Abstract test suite (ATS) and partial PIXIT proforma ○
18 ISO/NP TS 20598-1
Cooperative systems -- Test specifications for TS 19091 -- Part 1: Protocol implementation conformance statement (PICS) proforma ○
18 ISO/NP TS 20598-2
Cooperative systems -- Test specifications for TS 19091 -- Part 2: Test suite structure and test purposes (TSS&TP) ○
18 ISO/NP TS 20598-3
Cooperative systems -- Test specifications for TS 19091 -- Part 3: Abstract test suite (ATS) and partial PIXIT proforma ○
18 ISO/AWI TS 21176 Cooperative ITS -- Position, velocity and time functionality in the ITS station ○
18 ISO/AWI TS 21177 Secure vehicle interface -- ITS-station security services for secure session establishment and authentication ○
18 ISO/AWI TS 21184 Secure vehicle interface -- Data dictionary of vehicle-based information for C-ITS applications ○
18 ISO/AWI TS 21185 Secure vehicle interface -- Communication profiles for secure connection between an ITS-station and a vehicle ○
18 ISO/NP TR 21186 Cooperative ITS -- Guidelines on the use of C-ITS standards for hybrid communications ○
18 ISO/PWI TS 21189-1
Cooperative ITS -- Conformance test specifications for CEN ISO TS 17426 -- Part 1: Protocol implementation conformance statements (PICS) pro forma ○
Venues of TC 204 Plenary MeetingsTC 204 holds two plenary meetings per year, with the host country rotated between the North America, Europe, and Asia Pacific regions.
Year/ month Venue Country Year/ month Venue Country1st 1993.04 Washington U.S. 24th 2004.10 Beijing China
Special Meeting 1993.06 Stuttgart Germany 25th 2005.04 Paris France2nd 1993.11 Tokyo Japan 26th 2005.11 Portland U.S.3rd 1994.04 Atlanta U.S. 27th 2006.04 Busan Korea4th 1994.12 Paris France 28th 2006.11 Cape Town South Africa5th 1995.05 Sidney Australia 29th 2007.04 Lexington U.S.6th 1995.11 Yokohama Japan 30th 2007.11 Qingdao China7th 1996.05 London U.K. 31st 2008.04 Munich Germany8th 1996.10 Orland U.S. 32nd 2008.11 Ottawa Canada9th 1997.03 Noosa Australia 33rd 2009.05 Chiang Mai Thailand10th 1997.10 Berlin Germany 34th 2009.09 Barcelona Spain11th 1998.04 Toronto Canada 35th 2010.04 New Orleans U.S.12th 1998.10 Soul Korea 36th 2010.11 Jeju Korea13th 1999.06 Amsterdam Netherland 37th 2011.04 Prague Czech Rep.14th 1999.11 Montreal Canada 38th 2011.10 Tampa U.S.15th 2000.06 Kyoto Japan 39th 2012.04 Melbourne Australia16th 2000.11 Napoli Italy 40th 2012.10 Moscow Russia17th 2001.04 Honolulu U.S. 41st 2013.04 Seattle U.S.18th 2001.10 Queens Land Australia 42nd 2013.10 Kobe Japan19th 2002.05 London U.K. 43rd 2014.04 Oslo Norway20th 2002.10 Chicago U.S. 44th 2014.10 Vancouver Canada21st 2003.06 Nagano Japan 45th 2015.04 Hangzhou China22nd 2003.10 Wein Austria 46th 2015.10 Potsdam Germany23rd 2004.05 Vancouver U.S. 47th 2016.04 Concord U.S.
page
58

Standardization of ITS 1・2
Framework of Standardization 3・4
The Latest Trend of Automated Driving 5・6
Cross-cutting Activities of TC204 7・8
Activities of the TC 204 Working Groups 9~41
Standardization Activities in Europe 42
Related Standardization Activities 43~47
Development of International Standards 48
List of Work Items 49~58
Venues of TC 204 Plenary Meetings 58
ITS StandardizationActivities in Japan
2016
S t a n d a r d i z a t i o n o f I n t e l l i g e n t T r a n s p o r t S y s t e m sWebsites related to ITSWebsites related to ITS
IEEE www.ieee.org
ISO www.iso.ch
ISO/TC204
ITE www.ite.org
ITU www.itu.int
ISO/IEC JTC1 www.jtc1.org
NEMA (America) www.nema.org
OMG www.omg.org
PIARC www.piarc.org
SAE International www.sae.org
INEA inea.ec.europa.eu
TIA (America) www.tiaonline.org
US-DOT (America) www.dot.gov
National Police Agency www.npa.go.jp
Ministry of Internal Affairs and Communications www.soumu.go.jp
Ministry of Economy, Trade and Industry www.meti.go.jp
www.mlit.go.jp
Japanese Industry Standard Committee www.jisc.go.jp
Japan Institute of Country-ology and Engineering www.jice.or.jp
Society of Automotive Engineers of Japan www.jsae.or.jp
www.jeita.or.jp
Association of Radio Industries and Businesses www.arib.or.jp
www.vics.or.jp
ITS Technology Enhancement Organization http://www.its-tea.or.jp
www.hido.or.jp
Japan Standards Association www.jsa.or.jp
www.tmt.or.jp
Japan Automobile Research Institute www.jari.or.jp
JIPDEC www.jipdec.or.jp
Japan Digital Road Map Association www.drm.jp
ITS Info-Communications Forum www.itsforum.gr.jp
UTMS Society of Japan www.utms.or.jp
ITS America www.itsa.org
ITS Australia www.its-australia.com.au
ITSC China www.itschina.org
ITS Canada www.itscanada.ca
ITS Chile www.itschile.cl
ITS Czech Republic www.itsnetwork.org
ITS Finland www.its-finland.fi
ITS France www.atec-itsfrance.net
ITS Hong Kong www.its-hk.org
ITS India www.itsindia.org
ITS Japan www.its-jp.org
ITS Korea www.itskorea.or.kr
ITS Malaysia www.itsmalaysia.com.my
ITS Germany www.itsgermany.org
ITS Netherlands (Connekt) www.connekt.nl
ITS Norway www.itsnorge.no
ITS Russia its-russia.ru
ITS Spain www.itsespana.co
ITS Singapore www.itssingapore.org.sg
ITS South Africa www.itssa.org
ITS Sweden www.its-sweden.se
ITS Taiwan www.its-taiwan.org.tw
ITS Thailand www.its.in.th
ITS United Kingdom www.its-uk.org.uk
REAM (REAM Malaysia) www.ream.org.my
Organizations involved in standardization of ITS (International)Organizations involved in standardization of ITS (International)
Ministries and organizations involved in standardization of ITS (Japan)Ministries and organizations involved in standardization of ITS (Japan)
National and regional ITS representative organizationsNational and regional ITS representative organizations
This publication is prepared as a part of the ITS Standardization Project commissioned to JSAE by the Ministry of Economy, Trade and Industry,FY 2016.
1609-700
Published by:
10-2 GOBANCHO, CHIYODA-KU, TOKYO, 102-0076 JAPANTEL. +81-3-3262-8294FAX. +81-3-3261-2204URL. www.jsae.or.jp
Japan Electronics and Information TechnologyIndustries Association
Vehicle Information andCommunication System Center
AASHTO (America) www.aashto.org
ANSI (America) www.ansi.org
APEC www.apecsec.org
ASECAP www.asecap.com
ASTM (America) www.astm.org
CEN (Europe) www.itsstandards.eu
CEN/TC 278 (Europe) www.itsstandards.eu
EIA (America) www.eia.org
ERTICO (Europe) www.ertico.com
ETSI (Europe) www.etsi.org
ETSI ITS(Europe) www.etsi.org/index.php/technologies-clusters
technologies/intelligent-transport
FHWA (America) www.fhwa.dot.gov
IEC www.iec.ch
Highway Industries Development Organization
Ministry of Land, Infrastructure, Transport and Tourism
Japan Traffic Management Technology Association
Publication:September 2016
www.iso.org/iso/iso_technical_committee
%3Fcommid%3D54706
+表1-4合成用_Cs6.indd 1 16/09/14 18:37