-
7/31/2019 Actuator Prior Art
1/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
ELECTRIC FLAP ACTUATOR CONFIGURATIONS
BY DANTAM RAO
PRECISION MAGNETIC BEARING SYSTEMS INC.,
ALBANY, NY.
REPORT NO. 52-6-06STARTED 8-1-06
ENDED 9-3-06
rev date Description
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 1
PRECISION MAGNETIC BEARING SYSTEMS, INC.25 Walker Way, Suite 2A,
Albany, NY 12205 Tel: 518-218-0477 Fax: 518-218-0866
E-Mail: [email protected] Web: www.premag.com
-
7/31/2019 Actuator Prior Art
2/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
ABSTRACT
The goal of this paper is to document the prior art of flap
actuators. The scope includes linear forceactuators and torque
actuators. It describes various configurations of the force or
torque actuators.
It assesses their advantages and limitations and ranks them. A
brief summary of failure modes of
both force and torque actuators and lessons learned is
included.
Major specifications of a torque actuator planned by the Navy
are summarized. Next paper willdeal with description and advantages
of PreMag's geared actuator configuration.
Lockheed believes that current LEFAS actuator is satisfactory.
However, government believes
(from recent tests) that the long high speed shaft used in LEFAS
is its Achille's heel and is flawed.It wants to develop Rotary Gear
Transmission that uses only motors and gear train to eliminates
the high speed shaft as well as servovalue and hydraulic drive
unit.
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 2
-
7/31/2019 Actuator Prior Art
3/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
TABLE OF CONTENTS
1
INTRODUCTION...........................................................................................................................4
2 EMA
.................................................................................................................................................7
3 EHAS
................................................................................................................................................8
4 LEFAS
..............................................................................................................................................8
5 RGA TORQUE
ACTUATOR......................................................................................................11
5.1
BACKGROUND.............................................................................................................................115.2
RGA TORQUE
ACTUATOR...........................................................................................................12
5.3 LOW CHANCEFORPH
II..............................................................................................................12
6 RANKING ACTUATORS
...........................................................................................................12
6.1
EMA........................................................................................................................................13
6.2
LEFAS........................................................................................................................................136.3
RANKINGTHEACTUATORS............................................................................................................13
7
CONCLUSION..............................................................................................................................14
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 3
-
7/31/2019 Actuator Prior Art
4/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
1 INTRODUCTION
All military aircraft have several control surfaces which are
rotated to stabilize it when flying.
Ones on the wing are calledflaps, while those on the tail are
called rudders. Fig. 1 shows F-18Aaircraft and its flaps. The flap
are the hinged parts of the wing used to increase lift at
reducedairspeeds1. The specific flap that is attached to the
leading edge of the wing is called the leading
edge flap; the aircraft has two leading edge flaps, one on each
wing. (that attached to the trailing
edge is called the trailing edge flap2,but this is not the focus
of this report). In all military aircraft
flaps rotate during extreme manevours continuously and rapidly
to adjust lift loads. That is whythey are called maneuvering flaps,
meaning they are always moving always. (In commercial
aircraft they are mostly stationary, and move only during
landing and takeoff). The performance
of all military aircraft relies heavily on the ability of these
actuators 3to rotate the flaps rapidly andprecisely under the
command of the pilot.
Figure 1. F-18A Aircraft Leading Edge Flap Actuators.
Actuatoris device that applies linear force or rotary torque to
the flap to rotate it over a limited
angle against wind load, and provide the needed lift. The force
is applied to a lever, while the1 Quest for Performance,The
Evolution of Modern Aircraft,
http://www.hq.nasa.gov/office/pao/History/SP-468/ch10-5.htm/2
Sometimes the part on the leading edge is called a slat, while the
part on the trailing edge is called a flap, see
http://www.grc.nasa.gov/WWW/K-
12/airplane/flap.html3 Flap Actuator Maket is shared by Lucas
[30%], Liebherr [25%], Curtis-Wright [25%], Moog [20%] and Dowty
[10%], see
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 4
-
7/31/2019 Actuator Prior Art
5/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
torque is applied to a hinge. They are called force actuator or
torque actuator respectively. They
are located within the belly of the wing section.
Moogappears to be the monopoly and sole-source supplier for all
flap actuators in all military
aircraft and most commercial aircraft. Another firm in Israel
and Vikram Sarabhai Space Center,
Trivendrum are reportedly developing Electro Hydraulic
Actuators.
Fast airplanes require small, thin wings to achieve eye-popping
speeds far beyond Mach 2. The
thickness of the wing however is limited by the diameter of the
actuator (smaller the actuator,thinner is the wing, higher is the
aircraft speed). About 20 years back the flap actuators used to
be
20 cm (7.87 in) in diameter - hence wings used to be thicker
than 20 cm, so aircraft used to have
limited speed. Recent developments enabled actuator diameter to
be reduced to 15 cm (5.8 in),
enabling thinner wings and hence faster aircraft such as JSF.
The goal of this project to reduce theactuator diameter further
down to 10 cm (4 in), thereby. achieving higher speeds.
Fig. 2 shows the leading edge flap drive systems in F/A-18; it
is actuated4 by servo hydraulic
actuators. Current wing flaps have hydraulic fluid temperatures
limits of 250 degrees and airwithin the wing can be as hot at 100
C.They are however, very heavy, bulky, complicated, difficult
to maintain and leak-prone5. Once a hydraulic line leaks, it
could lead to loss of expensive plane.As a result, multiple
hydraulic circuits are used to maintain high degree of reliability,
increasing
the weight further.
Over past 20years Air Force built few experimental aircraft that
used electric power to actuate the
flaps. It essentailly uses electric power instead of hydraulic
power to rotate the flight control surfaces.
The schemes asre are called Power By Wire schemes. Most of them
incorporate electric motors to
generate linear force. Power by Wire concept was originated in
Air Force Research Lab, Dayton OH inearly 1990's.
It is widely recognized that PBW actuation is the next major
breakthrough in aircraft control. Justas the fly-by-wire flight
control system eliminated the need for mechanical interfaces,
power-by-
wire actuators can eliminate hydraulic systems. Control power
comes directly from the aircraft
electrical system instead of via hydraulics. This can reduce the
weight of aircraft, size of actuator,and maintenance cost6. It can
improve safety, efficiency, reliability and maintainability.
Removing
hydraulic systems would greatly reduce the amount of support
equipment and personnel required
to maintain and operate.
Government studies indicate that this new approach could deliver
up to a 5% reduction in
procurement costs, 3% in lower life-cycle costs, and a 6%
decrease in gross takeoff weight. The
emergency and secondary power system is much simpler and cleaner
if you go with the electricapproach, enabling a much smaller and
simpler airplane. This can reduce aircraft weight by as
much as 700 lb because weight is taken out of the hydraulic
system, out of the secondary power
system, out of the thermal management system7. Because it is not
generating as much heat, it also
4 M.I.T., Aircraft Systems Engineering,
http://ocw.mit.edu/NR/rdonlyres/Aeronautics-and-Astronautics/16-885JFall-2004/1ABA501E-4F31-4EEE-AEEB-123274492635/0/flight_controls_1.pdf5Ford,
T., Actuation systems development, J. Aircraft Engg and
Aerosp.Tech. Aug 1998, Vol. 70, No. 4, pp. 265 - 2706 Navy
Electrical Power and the Future:
http://www.nap.edu/html/tech_21st/t8.htm7 "Power by Wire", Avionics
Magazine, May 1, 2001.
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 5
-
7/31/2019 Actuator Prior Art
6/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
simplifies maintenance on the aircraft. Going to an electrical
distribution and electrical actuation
system simplifies the power and thermal management systems,
leading to significant savings.
PBW actuators are more efficient than their hydraulic
counterparts8. A hydraulic system in F-16
may generate ~ 3000 watts of heat at all times, regardless of
whether flaps are lifted or not. In
contrast, in the PBW approach, actuators consume power only when
flaps are activated, and eventhen they generate ~ 500 watts of
heat. With the PWB if you are not actuating, you do not
generate heat, and you dont have to dissipate it. As a result,
we dont have to provide a secondary
and emergency sources for cooling. This saves weight of thermal
management system making theaircraft smaller, lighter and
cheaper.
At present, three types of actuators EMA, EHAS, LEFAS - are used
to drive the flaps and other
control surfaces in military aircraft. All of them use 3-phase
PM motors. An experimental F-18Aused EMA9to drive flaps it uses two
motors that drive a single ball screw through a differential
gear; it eliminates oil pump and leak-prone oil lines. Some
F-35s use10 EHAS to drive rudders it
uses a motor to drive an oil pump that drives hydraulic pistons;
it eliminates leak-prone oil lines.
The F18A Lefas, uses an electric motor to pump a hydraulic motor
which spins a gearedtransmission; . In F-35 Lefas11, a motor drives
a shaft with transmission, eliminating oil pumps,
hydraulic motor and oil lines. Recently PreMag proposed to
Lockheed to embed motor andtransmission into one single unit; this
eliminates failure prone shaft12 in addition to oil pumps and
oil lines.
A force actuator can use an electric motor in two ways. In one
called Electro Hydro Static
Actuator (EHA), the motor drives an oil pump and oil pressure
drives a hydraulic cylinder. In
another called Electro Mechanical Actuator (EMA), the motor
drives a gear train which then drives
a ball screw that reciprocates. They are shown in Fig. 1.
8 Jensen et al.,Flight test experience with an electromechanical
actuator on the F-18 systems research aircraft, 19th Digital
Avionics Systems
Conf., Oct. 7-13, 2000, Philadelphia, PA9 Jenssen, S.C., et al.,
Fight test experience with an electromechanical actuator on the
F-18 systems research aircraft,10 Phillips, E. H., Big step for
F-35A, Aviation Week & Space Technology , Jan. 9, 2006, p.
44-45.11 Curtiss-Wright,
http://www.cwcontrols.com/pdf/pressrelease20061219.pdf12 PreMag,
Geared Motor Actuator configuration for Leading Edge Flap of JSF
aircraft, report no. 0001AC-1, Mar. 2007.
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 6
-
7/31/2019 Actuator Prior Art
7/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
Figure 2. Prior Art Force Actuator Concepts.
2 EMA
EMA consists of 2 small motors, a geartrain and a ball screw
ram. The motor drives
the gear train which drives a ball screw as
shown in Fig. 1b and 2. NASA has flown itin a military aircraft
with this EMA. It
claims that, compared to an EHA, the EMAis lighter, smaller, and
less complex becauseof the absence of an internal hydraulic
system. EMA's motor is made by MPC
Products, Skokie, IL, inverter is made byDynamics Controls Inc.,
Dayton, OH and
the Controller is made by British Aerospace
in Johnson City, NY. The motor appears to
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 7
Figure 3. EMA Force Actuator built for Air Force
-
7/31/2019 Actuator Prior Art
8/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
overheat, and it appears that effort to transfer the heat from
motor to aircraft skin failed13. It appears
that EMA technology was not chosen for the JSF by Lockheed or
the Government. The reason for
its disfavor inspite of extensive test experience is not
known.
3 EHAS
In EHAs the motor drives an oil pump. EHASuses high speed
reversible variable pressure
(3000 psi) pumps pump self-contained
hydraulic fluid to a piston. This drives the ram in
the same fashion as a standard hydraulic actuator(Figure 1(a)).
The motors need high bandwidth
or fast response time. For example JSF uses
force actuators called EHAS (ElectroHydrostaticActuation System)
to deflect tail rudders and
trailing edge flaps. Lockheed14integrated the 6
EHAS actuators built by Moog and PerkinsHannifin, CA with
motors, control electronics
and software made by Hamilton Sundstrand.
Fig. 3 shows the EHAS on a test bed. The
EHAS weigh 770 lb to 865 lb per Trimboli, Director of JSF
Vehicle Systems, LockeedAeronautics, Dallas15.
4 LEFAS
The Leading Edge Flap Actuation System (LEFAS) rotates the
leading edge flap. The hardware is brokeninto a mechanical part and
electrical part. Fig. 2 shows the mechanical part. It consists of a
drive unit, a
long shaft and two gear reducers, a torque limiter and a power
off brake (stop module). The drive unitspins a 20 ft long slender
shaft (called torque tube) at a high speed of 3000 rpm to power two
gear
reducers (called inboard transmission and outboard transmission,
or Rotary Gear Actuators, RGAs) The
transmissions convert low torque high speed shaft motion into
high torque low speed flap motion.
In F-18A, the LEFAS used a hydraulic motor to power the torque
tube. This consisted of an
electric pump motor that drive servovalves which drive a rotary
Hydraulic Drive Unit In F-35 or
JSF, they replaced the hydraulic motor with a big electric
motor, thereby eliminating high pressurehydraulic lines. The drive
is powered by a power source and controller. The power source
consists of a triple redundant 270 Vdc electrical system with 2
generators, a battery. The controller
consists of a power conversion system and a control system.
They eliminate the ball screw, and use only motor and gearbox.
The EHAS and LEFAS eliminate
hydraulic lines running throughout the plane. They do not
eliminate hydraulic oil completelyhowever. It does reduce weight,
complexity and risk of battle damage. These actuators weigh
more
than flight control systems used in legacy fighters such as the
F-15 per an article in Aerospace
Weekly.
13 Oscillating heat pipe for actuator cooling,
http://www.pr.afrl.af.mil/mar/1999/oct1999.pdf#search=%22EMA%2214
Ramsey, J. W., Power by Wire, Avionics, May 2001,
http://www.avionicsmagazine.com15 Phillips, E. H., Big step for
F-35A, Aviation Week & Space Technology , Jan. 9, 2006, p.
44-45.
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 8
Figure 4. EHAS Actuator on Test Bed
-
7/31/2019 Actuator Prior Art
9/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
LEFAS however is heavy and failure-prone. In JSF , the flap is
20 ft long. LEFAS that drives this
long flap contains a single variable speed hydraulic drive unit
(HDU) and 2 gear transmissions,all produced by16Moog,
Curtiss-Wright and Parker. The HDU drives a long high speed
shaft
(3000 rpm, 20 ft).
Figure 5. LEFAS relies on a 20ft long and slender torque
tube.
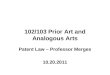
Figure 5 shows the general layout of the LEFAS. It consists of
HDU with torque bar, inboard
transmission, torque limiter and stop module, pillow bloc,
universal joint, output transmission and controlunit. Hydraulic
Drive Unit HDU, driven by a servovalve spins a 20 ft long torque
tube at high speed.This goes through two sets of gear trains called
inboard and outboard transmissions.
This shaft drives 3 transmissions, called RGA. Each RGA is 1.5
ft long and is made of 4 or moreslices. Each slice houses
independent planetary gear train set. Each planetary gear slice
reduces
speed from 3000 rpm to 5 rpm and has its hinges rotate the flap
at slow speed. The diameter of the
3 RGAS steps down from 5.8, 4.2, 2.5 as one travels from root to
tip. The inboard transmission has
5 "nodes" that attach to the wing; inner node are made of 2
tabs, while outer most hinge has only onetab, 7 total. It also has
4 " hinges"; each hinge is made of 2 tabs, each tab has 2 eyes. The
hinges rotate
the flap. The outboard transmission has 8 "nodes" made of 14
tabs to attach to wing, and 7 "hinges"
made of 14 tabs to rotate the flap. The connection in the middle
is a universal joint allowing the wingto fold. Each of the hinge
attaches to each wing rib and flap part of the rib. Each of the
transmissions
converts high speed low torque from torque tube to low speed
high torque that moves the leading edge
flap. Figure 5 shows the Lefas system for FA18 air craft. From
this, one can see that the entire LEFAS
16 In JSF (F-35) Curtiss-Wright supplies Leading Edge Flap
Rotary Geared Actuators and Torque Tubes. These areDeveloped in
partnership with Moog Inc.,(the LEFAS Integrator), these mechanisms
position the leading edge flaps during take-off, landing
and during flight to provide additional lift for maneuverability
and reduced take-off and landing speeds. See
http://www.cwcontrols.com/pdf/pressrelease20061219.pdf
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 9
-
7/31/2019 Actuator Prior Art
10/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
is system has at least 20 parts, is surprisingly very complex
and expensive.
Figure 6. LEFAS flight actuator system for FA18 (From Moog)
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 10
-
7/31/2019 Actuator Prior Art
11/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
5 RGA TORQUE ACTUATOR
5.1 BACKGROUND
Figure 7 Goal is to replace the HDU, transmission and brake with
a Geared Motor Actuator.
Figure 8 depicts the parts that are to be replaced in Phase I.
These include the drive unit (whetherhydraulic or electric),
inboard transmission with 4 slices, the torque tube and stop
module. This
transmission consists of 4 gear reducers or slices. Each slice
has a stationary tab pair (that fixes its house
to the wing) and a moving tab pair (that attach it to the hinge
on the leading edge flap). Current Lefasslices rely on compound
differential planetary gear set; they employ a torque limiter and
brakes to
prevent the system from self-damage; these fail-safe features
ensure that the flap will not spin
uncontrolled should a component fail or rupture.
In LEFAS the shaft is 20 ft long and can spin up to 3000 rpm at
full no load rate. It is like a long
propeller shaft that connects all transmissions. The rotor
dyanmics of the flimsy shaft is complex and
could yield several resonant failure modes. A full wing may have
as many as 5 transmissions on eachwing. The diameter of each
transmission set gets smaller as one moves from wing root to wing
tip
because the wing gets thinner.
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 11
-
7/31/2019 Actuator Prior Art
12/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
5.2 RGA TORQUE ACTUATOR
Rotary Gear Actuator (RGA) essentially uses electric motor and
gear train to drive the flap. It will have
no high speed shaft, no servovalve, no hydraulic motor or ball
screw. The intent is to replace all partsshown in Figure 5. This
eliminates the troublesome high speed shaft and Servovalve and
Hydraulic Drive Unit as well as inboard transmission. In its
place will be one RGA. RGA will
consist of 4 slices. Each slice is made of an electric motor and
gear train, and drives one hingejoint of the flap. The motors and
gear trains are housed in one unit while the controller is housed
ina separate unit.
In Phase I, only one slice, i.e., geared motor that drives one
hinge joint of the transmission will beconsidered. Notionally, one
motor per hinge or one motor for all four-hinges are possible
configurations. The intent is to allow redundant operation if
one of the motors fails. The motor
design should be scalable down to the smaller outboard rotary
transmission also. More details of theinboard rotary transmission
is shown in Figure 4.
5.3 LOW CHANCE FOR PH II
In Phase II, we propose to perform detailed design of the
complete actuator system and fabricate a
prototype. Phase II detailed design will address what to do with
the heat produced. In this phase wewill design the cooling system
to minimize the hot spot temperatures. We will work with the
government and prime contractor to develop thermal management
strategies that will transfer the
heat into identified heat sink (viz., surrounding cabin air or
wing structure or to outside ambientair). We will use multiple
paths, extended surfaces and high thermal conductivity materials
to
siphon the heat in this process. It will also address detail
control design and integration. It will also
address detail failure modes and redundancy operations. In phase
II we will test the performance of
components in the laboratory, and will ship the tested prototype
to the JSF aircraft builder(Lockheed Aeronautics) for testing in
his Vehicle Systems Integration Facility.
Navy will however rely on the advice of Lockheed to go into Ph
II. To get Ph II money, we have topass through 4 hoops. First,
Lockheed has to verify and concur that PreMag's torque actuator
configuration is lighter than current LEFAS design (or it has
other performance advantages).
Second, Lockheed thinks that the current electrohydraulic LEFAS
"works", and sees no reason tochange from it, so it has no
incentive to support the fundamental premise that Lefas design
is
faulty. Third, Lockheed does not believe that there is a motor
so small that it will fit in the space
and generate the huge torque. Fourth, Lockheeds current plans
for LRIP from 2008 will becompletely disrupted if it were to admit
that lefas is defective and embark on plan for redesign. In
short, Lockheed and Moog has all the incentives to actively
oppose any funding of further
research, and they will lose heavily if it supports this
research direction. Governments has good
intent is to support development, but without Lockheeds blessing
it cannot move into Ph II. Assuch chances for funding Phase II
appear to be low.
6 RANKING ACTUATORS
This document is Proprietary to PreMag. Disclosure to thrid
parties is prohibited. 12
-
7/31/2019 Actuator Prior Art
13/14
-
7/31/2019 Actuator Prior Art
14/14
Report 52-6-06 Electric Flap Actuator - Prior Art Copyright
PreMag
the aircraft speed. The planned RGA, which uses only electric
motor and gear train, appear to eliminate
hydraulic drive and servo valve and hence could potentially save
significant weight and space.
7 CONCLUSION
In this paper we have reviewed various configurations of the
Power By Wire actuators used torotate the control surfaces of
military aircraft. We have identified 4 configurations
Electrostatic Hydraulic Actuator (EHA),
Electro Mechanical Actuator (EMA)
Leading Edge Flap Actuator (LEFAS)
Rotary Gear Actuator (RGA).
EHA and EMA are force actuators. LEFAS and RGA are torque
actuators. EHA uses oil pumpmotor and linear hydraulics. EMA uses
geared motor driving a ball screw. LEFAS used oil pump
motor and rotary hydraulic drive, a long high speed shaft and
gear trains and is the most complex.
RGA uses electric motors and gear train and has fewest
parts.
Development of RGA forms the subject matter of the Ph I study
effort. We presented
specifications of RGA for a notional aircraft. Lockheed believes
that current LEFAS actuatorworks satisfactorily. However,
government believes (from recent tests) that the long high
speed
shaft used in LEFAS is its major weakness. It wants to develop
RGA which will eliminate it.