-
7/28/2019 adhoc netwrk ppt(1)
1/175
Unicast Routing
Ad Hoc networks
(under standardization in the IETF
MANET WG)
-
7/28/2019 adhoc netwrk ppt(1)
2/175
What is an ad hoc networkA wireless multi-hop
infrastructure-lessnetwork whose devices act as source/destination
of messages & as relay forpackets generated by a node s and
addressed
to a node z (iff they are on a s-z route)Pros: No need for
infrastructure low cost,enables communication where it is
usuallynot needed or is not viable
Must be: Self-organizing, self-configuring,self-maintaining
-
7/28/2019 adhoc netwrk ppt(1)
3/175
Application scenariosCollaboration between users in
officeenvironments
Disaster recovery applications
Military networksPersonal Area Networks
Home Networking
Wireless Sensor Networks (WSNs)Inter-vehicular communication
-
7/28/2019 adhoc netwrk ppt(1)
4/175
Features of ad hoc networksHighly dynamic networks device
mobility, energysaving sleep/awake modes
Need for low energy/resource-consuming, simpleprotocols
Bandwidth and resource constrained environmentTraffic: All-pairs
in general ad hoc networks, from sensors to sink(s) in
sensor networks
In many case not high
Scale: Application dependent 10-100 nodes in traditional ad hoc
networks
1000-10000 in sensor networks
-
7/28/2019 adhoc netwrk ppt(1)
5/175
Features of highly resource constrained ad hocnetworks
(WSNs)
Highly dynamic networks due to device mobility (only insome
specific applications), to the fact the active node setchanges in
time for sake of energy saving (always to beconsidered)
Need to design low energy/resource-consuming, simpleprotocols
very critical, energy consumption a realbottleneck
Traffic from sensors to sink(s)
Scalability is a major issueCode must be simple (small storage
capability, verysimple, inexpensive, resource constrained
devices)
First solutions we will see for traditional ad hoc networksdo
not scale to high numbers and are not energy-saving
-
7/28/2019 adhoc netwrk ppt(1)
6/175
Routing-Traditional approach(from Reti 1)
Intra-AS routing in the Internet
Link State Approaches
(info on the topology graph gathered atnodes which run shortest
path algorithms-Dijkstra- to decide the routes to thedifferent
destinationse.g. OSPF routingprotocol)
Distance Vector approaches (e.g. RIP)
-
7/28/2019 adhoc netwrk ppt(1)
7/175
Bellman-FordGiven a graph G=(N,A) and a node sfind the shortest
path
froms
to every node in N.A shortest walk from sto i subject to the
constraint that the walkcontains at most h arcs and goes through
node sonly once, is denotedshortest(
-
7/28/2019 adhoc netwrk ppt(1)
8/175
Bellman-Ford
Dh+1i=mink [wi,k + Dhk]
Can be computed locally.
What do I need?
For each neighbor k, I need to know-the cost of the link to it
(known info)
-The cost of the best route from the neighbor k to the
destination(this is an info that each of my neighbor has to send to
me viamessages)
In the real world: I need to know the best routes among each
pair of nodes we apply distributed Bellman Ford to get the
bestroute for each of the possible destinations
-
7/28/2019 adhoc netwrk ppt(1)
9/175
Distance Vector Routing Algorithm-Distributed Bellman Ford
iterative:continues until nonodes exchange info.
self-terminating: nosignal to stop
asynchronous:nodes need notexchange info/iteratein lock
step!
Distributed, based onlocal info:
each nodecommunicates onlywith directly-attachedneighbors
Distance Table data
structureeach node has its own
row for each possibledestination
column for each directly-attached neighbor to node
example: in node X, for dest.Y via neighbor Z:
D (Y,Z)X
distance from X toY, via Z as next hop
c(X,Z) + min {D (Y,w)}Z
w
=
=
Cost associated to the (X,Z) link
Info maintained at Z. Min mustbe communicated
-
7/28/2019 adhoc netwrk ppt(1)
10/175
Distance Vector: link cost changesLink cost changes:
good news travels fastbad news travels slow-count to infinity
problem!
X Z
14
50
Y60
algorithmcontinues
on!
Y detects link costIncrease but think can
Reach X through Z at atotal cost of 6 (wrong!!)
The path is Y-Z-Y-X
-
7/28/2019 adhoc netwrk ppt(1)
11/175
Count-to-infinityan everyday lifeexample
Which is the problem here?the info exchanged by the protocol!!
the best route to X I
have has the following cost (no additional info on the
route)
A Roman example-assumption: there is only one route going from
Colosseo to
Altare della Patria: Via dei Fori Imperiali. Let us now
consider
a network, whose nodes are Colosseo., Altare della Patria,
Piazza del Popolo
Colosseo Altare PatriaPiazza del
Popolo
1 Km 1 Km
-
7/28/2019 adhoc netwrk ppt(1)
12/175
Colosseo Al.Patria P.Popolo1Km 1Km
The Colosseo. and Alt. Patria nodes exchange the following
info
Colosseo says the shortest route from me to P. Popolo is 2
Km
Alt. Patria says the shortest path from me to P. Popolo is
1Km
Based on this exchange from Colosseo you go to Al. Patria, and
from there toPiazza del Popolo OKNow due to the big dig they close
Via del Corso(Al. PatriaP.Popolo)
Al. Patria thinks I have to find another route from me to
P.Popolo.
Look there is a route from Colosseo to P.Popolo that
takes 2Km, I can be at Colosseo in 1Km I have founda 3Km route
from me to P.Popolo!! Communicates the new cost to
Colosseo that updates OK I can go to P.Popolo via Al. Patria in
4Km
VERY WRONG!! Why is it so? I didnt know that the route from
Colosseo to P.Popolo was going through Via del Corso from
Al.Patriato P.Popolo (which is closed)!!
Count-to-infinityeveryday life example (2/2)
-
7/28/2019 adhoc netwrk ppt(1)
13/175
Routing in ad hoc networks-Goals
Minimal control overhead
Minimal processing overhead
Multi-hop path routing capability
Dynamic topology maintenance
No loops
Self-starting
-
7/28/2019 adhoc netwrk ppt(1)
14/175
2 Primary Approaches
Proactive Based on traditional distance-vector and
link-state
protocols Each node maintains route to each other network
node
Periodic and/or event triggered routing update exchange
Higher overhead in most scenarios
Longer route convergence time Examples: DSDV, TBRPF, OLSR
-
7/28/2019 adhoc netwrk ppt(1)
15/175
Highly Dynamic Destination-SequencedDistance-Vector (DSDV)
RoutingProactive, distance vector approach (uses
distributedasynchronous Bellman Ford). Updates on routes
coststransmitted periodically or when significant new informationis
available.
Difference wrt Bellman Ford: in ad hoc networks there
arefrequent changes in the topology, solutions must try to
avoidloops (approaches such as Poison reverse non effective
inbroadcast channels, we seek solutions which are simple andfully
distributed)
Metrics: fresh routes better than stale routes, number ofhops
used to select among the fresh routes
How to identify fresh routes? By means of sequencenumbers
identifying the freshness of the communicated
information. When changes occur, the sequence
numberincrease.
-
7/28/2019 adhoc netwrk ppt(1)
16/175
Highly Dynamic Destination-SequencedDistance-Vector (DSDV)
RoutingPeriodically destination nodes transmit updates with a
newsequence number (and such updates are propagated by theother
nodes). Updates contain information on the costs toachieve the
different destinations and the freshness of thedelivered
information
Data broadcast include multiple entries each with: Destination
address
Number of hops required to reach the destination
Sequence number of the information received regarding that
destination as originally stamped by the destinationIn the
header the data broadcast also include: Address (HW address/Net
address) of the sender of the message
Sequence number created by the transmitter
Two types of updates (full dump or incremental-only
changes- to decrease bandwidth consumption.
Hi hl D i D i i S d
-
7/28/2019 adhoc netwrk ppt(1)
17/175
Highly Dynamic Destination-SequencedDistance-Vector (DSDV)
RoutingHow can the costs be modified? Cost=number of hops,
target:
using fresh routes as short as possible a link cost changesfrom
1 to inf and from inf to 1
How do we detect that a link is broken? At layer 2 (no
hellomessages received for some time, or attempts to retransmit
aframe exceeds the MAC protocol threshold) or at layer 3 (do
not receive periodic updates by a neighbor)Link cost increase (1
inf): The nodes incident to that link (A,B) discover it (see
above)
Routes going through that link get assigned an inf cost in nodes
A and Brouting tables
A new sequence number is generated by the mobile node. Mobile
nodesdifferent from the destination use odd SN, the destination
even SN.
Updates with routes with infinite cost are immediately
transmitted bynodes
Link cost decrease (inf1): Immediately transmits updates
-
7/28/2019 adhoc netwrk ppt(1)
18/175
Highly Dynamic Destination-SequencedDistance-Vector (DSDV)
RoutingWhen a node receives updates it sees if costs to reach
thedifferent destinations can be improved: routes with more recent
sequence numbers to a given destination are
used
if more routes available with the same SN the shortest is
used
Newly recorded routes are scheduled for immediateadvertisement
(inf finite value)
Routes with improved metric are scheduled for advertisementat a
time which depends on the estimated average settling
time for routes to that particular destination (based onprevious
history)
As soon as a route cost changes the node may delayinforming its
neighbors but immediately starts using the newinformation for its
forwarding
-
7/28/2019 adhoc netwrk ppt(1)
19/175
Highly Dynamic Destination-SequencedDistance-Vector (DSDV)
Routing-Correctness
Assuming routing tables are stable and a change occurs let G(x)
denotes the routes graph from the sources to x BEFORE the
change (assume no loop)
change occurs at iwhen 1) the link from ito its parent p(i) in
G(x)
breaks isets to inf that route (no loop can occur) 2) node
ireceivesfrom one of its neighbors k a route to x with sequence
number SNxkand metric m which is selected to replace the current
metric ihas toreach x (this occurs only if SNxkgreater than the
previous SN I hadstored Snxi or if the two SN are equal but the new
route has a lowerhop cost in the first case if selecting k leads to
a loop then SNx
k
-
7/28/2019 adhoc netwrk ppt(1)
20/175
-
7/28/2019 adhoc netwrk ppt(1)
21/175
Why traditional approacheshave limits?Proactive protocols are
costly in terms of overhead(the bandwidth and energy are critical
resources)
The cost of maintaining routes updated may not
make sense in an environment in which Medium-high mobility
Medium-high dynamicity (awake/asleep states)
Often make the opt. Route change (requiring updates)while
Traffic is generally low (so the cost of maintaining
alwaysupdated routes is not balanced by their use)
If this is the scenario what can we do?
-
7/28/2019 adhoc netwrk ppt(1)
22/175
2 Primary Approaches (cont.)
Reactive (on-demand) Source build routes on-demand by
flooding
Maintain only active routes Route discovery cycle
Typically, less control overhead, better scalingproperties
Drawback: route acquisition latency Example: AODV, DSR
-
7/28/2019 adhoc netwrk ppt(1)
23/175
Ad hoc On-Demand DistanceVector (AODV) RoutingReactive (nodes
that do not lie on active paths neithermaintain any routing
information nor participate in anyperiodic routing table exchange;
a node does not have todiscover/maintain a route to a destination
till it is on a path
to it or has to send messages to it)Route discovery cycleused
for route finding
Maintenance ofactiveroutes
Sequence numbers used for loop prevention and as routefreshness
criteria
Descendant of DSDV (standard distance vector approachmapped to
ad hoc networks), in AODV no periodic updatesbut pure on-demand
operation.
Provides unicast and multicast communication
-
7/28/2019 adhoc netwrk ppt(1)
24/175
AODV: Route Discovery
1. Node Sneeds a route to D AND does nothave routing info for it
in its table
A
B
C D
S
-
7/28/2019 adhoc netwrk ppt(1)
25/175
AODV: Route Discovery
1. Node Sneeds a route to D
2. Creates a Route Request (RREQ)
Enters Ds IP addr, seq#,Ss IP addr, seq#
hopcount (=0), broadcast ID
A
B
C D
S
-
7/28/2019 adhoc netwrk ppt(1)
26/175
AODV: Route Discovery
1. Node Sneeds a route to D2. Creates a Route Request (RREQ)
Enters Ds IP addr, seq#,Ss IP addr, seq#
hopcount (=0), broadcast ID
3. Node Sbroadcasts RREQ to neighbors
A
B
C D
SRREQ
-
7/28/2019 adhoc netwrk ppt(1)
27/175
AODV: Route Discovery
4. NodeAreceives RREQ Makes reverse route entry for S
dest=S, nexthop=S, hopcnt=1,expiration time for reverse path
Source node, Source node SN,D,broadcastID also maintained It has
no route to D, so it rebroadcasts RREQ (hopcount
increased)
If it has already received that request (same source
andbroadcast ID) it discards the RREQ
if it knows a valid path to D it will send back a reply to
thesource
A
B
C D
SRREQ
-
7/28/2019 adhoc netwrk ppt(1)
28/175
AODV: Route Discovery
4. NodeAreceives RREQ Makes reverse route entry for S
dest=S, nexthop=S, hopcnt=1 It has no route to D, so it
rebroadcasts RREQ
A
B
C D
S
RREQ
-
7/28/2019 adhoc netwrk ppt(1)
29/175
AODV: Route Discovery
5. Node Creceives RREQ Makes reverse route entry for S
dest=S, nexthop=A, hopcnt=2 It has a route to D, and the seq#
for route to D
is >= Ds seq# in RREQ
A
B
C D
S
RREQ
-
7/28/2019 adhoc netwrk ppt(1)
30/175
AODV: Route Discovery
5. Node Creceives RREQ (cont.) Ccreates a Route Reply (RREP)
Enters Ds IP addr, seq#
Ss IP addr, hopcount to D(= 1), lifetime of theforward route
Unicasts RREP toA
A
B
C D
S
RREQ
-
7/28/2019 adhoc netwrk ppt(1)
31/175
AODV: Route Discovery
5. Node Creceives RREQ (cont.) Ccreates a Route Reply (RREP)
Enters Ds IP addr, seq#Ss IP addr, hopcount to D(= 1).
Unicasts RREP toA
A
B
C D
S RREP
-
7/28/2019 adhoc netwrk ppt(1)
32/175
AODV: Route Discovery
6. NodeAreceives RREP Makes forward route entry to D
dest = D, nexthop = C, hopcount = 2 Unicasts RREP to S
A
B
C D
SRREP
RREP
-
7/28/2019 adhoc netwrk ppt(1)
33/175
AODV: Route Discovery
7. Node Sreceives RREP Makes forward route entry to D
dest = D, nexthop =A, hopcount = 3
Also the latest SN of the destination is updated when
receivingthe RREP
Nodes not along the path determined by the RREP will timeout
after ACTIVE_ROUTE_TIMEOUT (3000ms) and will deletethe reverse
pointer
A
B
C D
SRREP
-
7/28/2019 adhoc netwrk ppt(1)
34/175
AODV: Route Discovery
7. Node Sreceives RREP Makes forward route entry to D
dest = D, nexthop =A, hopcount = 3 Sends data packets on route
to D
A
B
C D
S
-
7/28/2019 adhoc netwrk ppt(1)
35/175
What if.
A node receives further RREPs for the samerequest? (e.g. more
neighbors of a node hadpaths to the destination in cache)? upon
reception of another RREP the node
updates its routing information and propagatesthe RREP only if
the RREP contains either agreater destination SN, or the same
destination SN
with a smaller hopcount
-
7/28/2019 adhoc netwrk ppt(1)
36/175
Other info maintained
Each node maintains the list of activeneighbors, neighbors
sending to a givendestination through it useful for route
maintenance
Routing table entries: dest,next hop,hopcount, dest SN, active
neighbors for thisroute, expiration time for route table entry
(updates each time the route is used fortransmitting data routes
entries aremaintained if the route is active)
-
7/28/2019 adhoc netwrk ppt(1)
37/175
AODV: Route Maintenance
1. Link between Cand Dbreaks2. Node Cinvalidates route to Din
route table3. Node Ccreates Route Error (RERR) message
Lists all destinations which are now unreachable
Sends to upstream neighbors
Increases of one the SN of the destination
A
B
C D
S RERR
-
7/28/2019 adhoc netwrk ppt(1)
38/175
AODV: Route Maintenance
4. NodeAreceives RERR Checks whether Cis its next hop on route
to D
Deletes route to D Forwards RERR to S
A
B
C D
SRERR
RERR
-
7/28/2019 adhoc netwrk ppt(1)
39/175
AODV: Route Maintenance
5. Node Sreceives RERR Checks whetherAis its next hop on route
to D
Deletes route to D Rediscovers route if still needed (in that
case it
sends a RREQ with a SN which is equal to thelast known
destination Sequence Number +1)
A
B
C D
SRERR
-
7/28/2019 adhoc netwrk ppt(1)
40/175
AODV: Optimizations
Expanding Ring Search
Prevents flooding of network during route
discovery Control Time To Live (TTL) of RREQ to search
incrementally larger areas of network
Advantage: Less overhead when successful Disadvantage: Longer
delay if route not found
immediately
-
7/28/2019 adhoc netwrk ppt(1)
41/175
AODV: Optimizations (cont.)
Local Repair Repair breaks in active routes locally instead
of
notifying source
Use small TTL because destination probably hasntmoved far
If first repair attempt is unsuccessful, send RERR tosource
Advantage: repair links with less overhead, delay andpacket
loss
Disadvantage: longer delay and greater packet losswhen
unsuccessful
-
7/28/2019 adhoc netwrk ppt(1)
42/175
AODV: Summary
Reactive/on-demand
Sequence numbers used for route
freshness and loop preventionRoute discovery cycle
Maintain only active routes
Optimizations can be used to reduceoverhead and increase
scalability
-
7/28/2019 adhoc netwrk ppt(1)
43/175
Dynamic Source Routing (DSR)
Reactive
Route discovery cycleused for route
findingMaintenance ofactiveroutes
Utilizes source routing
-
7/28/2019 adhoc netwrk ppt(1)
44/175
DSR: Route Discovery
1. Node Sneeds a route to D
2. Broadcasts RREQ packet
1. RREQ identifies the target of the route discovery,contains a
route record in which the traversed route isaccumulated, contains a
pair uniquely identifying the request
A
B
C D
S
RREQ: S
-
7/28/2019 adhoc netwrk ppt(1)
45/175
DSR: Route Discovery
1. Node Sneeds a route to D2. Broadcasts RREQ packet
3. NodeAreceives packet, has no route to DAND is NOT D
Rebroadcasts packet after adding its address to
source route
A
B
C D
S
RREQ: S
-
7/28/2019 adhoc netwrk ppt(1)
46/175
DSR: Route Discovery
1. Node Sneeds a route to D2. Broadcasts RREQ packet
3. NodeAreceives packet, has no route to D Rebroadcasts packet
after adding its address to
source route
A
B
C D
S
RREQ: S, A
-
7/28/2019 adhoc netwrk ppt(1)
47/175
DSR: Route Discovery
4. Node Creceives RREQ, has no route to D Rebroadcasts packet
after adding its address to
source route
A
B
C D
S
RREQ: S, A
-
7/28/2019 adhoc netwrk ppt(1)
48/175
DSR: Route Discovery
4. Node Creceives RREQ, has no route to D Rebroadcasts packet
after adding its address to
source route
A
B
C D
S RREQ: S, A, C
-
7/28/2019 adhoc netwrk ppt(1)
49/175
DSR: Route Discovery
4. Node Creceives RREQ, has no route to D Rebroadcasts packet
after adding its address to
source route5. Node Dreceives RREQ, unicasts RREP to C Puts
source route accumulated in RREQ into
RREP
A
B
C D
S RREQ: S, A, C
-
7/28/2019 adhoc netwrk ppt(1)
50/175
DSR: Route Discovery
4. Node Creceives RREQ, has no route to D Rebroadcasts packet
after adding its address to
source route5. Node Dreceives RREQ, unicasts RREP to C Puts
source route accumulated in RREQ into
RREP
A
B
C D
S RREP: S, A, C, D
-
7/28/2019 adhoc netwrk ppt(1)
51/175
DSR: Route Discovery
6. Node Creceives RREP Unicasts toA
A
B
C D
S RREP: S, A, C, D
-
7/28/2019 adhoc netwrk ppt(1)
52/175
DSR: Route Discovery
6. NodeAreceives RREP Unicasts to S
A
B
C D
SRREP: S, A, C, D
-
7/28/2019 adhoc netwrk ppt(1)
53/175
DSR: Route Discovery
8. Node Sreceives RREP Uses route for data packet
transmissions
A
B
C D
SRREP: S, A, C, D
General node operation upon
-
7/28/2019 adhoc netwrk ppt(1)
54/175
General node operation uponreceiving RREQ
If the pair has recently been seen, DISCARD
If the node ID is already listed in thesource route DISCARD
avoids loops
If Im the destination, send a RREP
Otrherwise, append my ID in the sourceroute and rebroadcast
(orange casesalready seen in the previous slides)
-
7/28/2019 adhoc netwrk ppt(1)
55/175
Route maintenance
The two endpoints of a failed link aretransmitted to the source
in a route errorpacket
Upon a receiving a RERR packet a nodeinvalidates all the routes
going through thatlink
If the route is invalidated and it is needed, anew route must be
discovered
-
7/28/2019 adhoc netwrk ppt(1)
56/175
Optimizations (1)Extensive use of caching (caching source
routes
means that I already know all the route tointermediate
destinations, discovery a betterroute to an intermediate
destination also bringsme to improve the route to the final
destination).
Transmitting packets or sending back repliesmake me learn
routes.
A node that knows a route to a given destination(has a source
route in cache) can immediately
answer a RREQ Broadcast storm? Each nodes waits for a time which
is
C*(h-1+r), r random in (0,1), h length of the route
Imadvertising. Only if I havent received other routes listen to
other routes tx in the meanwhile-I transmitmine.
-
7/28/2019 adhoc netwrk ppt(1)
57/175
Optimization (2)
Operation in promiscuous mode (I keepdiscovering new routes by
transmission of routesby my neighbours)
RREQ overhead minimization: first set a TTL=1, if
I do not get answer I set it to infinityPath shortening: if Y
receives a packet by node X
but in the source route we have X, B,,C,Y, Ysignals the path can
be shortened (unsolicited
RREP)What if the network is disconnected? Exponentialback-off to
decrease the quantity of RREQ sent
-
7/28/2019 adhoc netwrk ppt(1)
58/175
AODV and DSR Differences
DSR uses source routing;AODV uses next hop entry
DSR uses route cache;
AODV uses route tableDSR route cache entries do not
havelifetimes;
AODV route table entries do have lifetimes
DSR nodes respond to each RREQ duplicate;AODV nodes only respond
to first RREQ,unlessone arrives along a better path
-
7/28/2019 adhoc netwrk ppt(1)
59/175
-
7/28/2019 adhoc netwrk ppt(1)
60/175
Geographically-Enabled Routing
Outline Problems with proactive approaches
Problems with reactive approachesA new way of naming\locating
the
destination node: geographic routing
Two seminal protocols
DREAM & LAR Geo-enable routing costs: I need to know
where I am, where the destination is.
Proactive Solutions:
-
7/28/2019 adhoc netwrk ppt(1)
61/175
Proactive Solutions:Drawbacks
Updates overhead, especially inpresence of high mobility
Overhead for enforcing loop freedomLarge routing tables
Low scalability
Is it really necessary to maintain aconsistent view of the
networktopology?
-
7/28/2019 adhoc netwrk ppt(1)
62/175
Reactive Protocols: DrawbacksThe discovery phase introduces long
delaysRoute discovery and maintenance is very sensitive tonode
mobility
Route caching is memory greedy
The size of the header of a data packet can becomecumbersome in
approaches such as DSR (noscalability)
Operating in promiscuous mode is energy-consuming.
Relying on flooding based route discovery is
resourceconsuming.
Is the dependency on the network topologyavoidable?
Location-Enabled Ad Hoc
-
7/28/2019 adhoc netwrk ppt(1)
63/175
Location Enabled Ad HocRouting
Nodes are equipped with positioningsystem devices (e.g., Global
PositioningSystem receivers) that make themaware of their
positionThis enables directional routing
Possible solutions differ on how the
location information of the destinationnodes is achieved
-
7/28/2019 adhoc netwrk ppt(1)
64/175
Strengths
No need to update big routing tables, no
need to piggyback routes to the packet
Destination position must be known at the
source.
No need to know the nodes on the way to the
destination: they can be moving while the
packet travels
-
7/28/2019 adhoc netwrk ppt(1)
65/175
Drawbacks
Needs extra hardware
Depends on the extra hardware limitation
(and resource requirements)
Scalability is an issue (indeed the problem
here translates to how to maintain correct
estimates of the nodes positions)
-
7/28/2019 adhoc netwrk ppt(1)
66/175
DREAM
Distance routing effect algorithm formobility [Basagni+,
1998]
A proactive, effective way to spreadlocation information
Directional routing
Disseminating Location
-
7/28/2019 adhoc netwrk ppt(1)
67/175
Disseminating LocationInformation: Problems
Need to periodically update thelocation of a moving node.
Efficient broadcast of location information Determining how far
each location packet
should travel
Determining how often a location packetshould be sent
Disseminating Location
-
7/28/2019 adhoc netwrk ppt(1)
68/175
Disseminating LocationInformation: Solutions
Distance effect
Rate of updates is bound to the mobilityof the node
-
7/28/2019 adhoc netwrk ppt(1)
69/175
The Distance Effect
-
7/28/2019 adhoc netwrk ppt(1)
70/175
The Distance Effect
Closer nodes look like they are movingfaster
Need to receive more location updatesfrom closer node
Each location update packet is
associated with an age that determineshow far that packet must
travel
-
7/28/2019 adhoc netwrk ppt(1)
71/175
DREAM: Rate of updates
Triggered by the mobility of the nodes
The faster the node the more updates itsends
A plus: slow moving nodes impose littleoverhead
-
7/28/2019 adhoc netwrk ppt(1)
72/175
DREAM: Directional Routing
Source S determines the location ofdestination D at time t0
based on its locationtable
Based on the current time t1 and t0 Sdetermines the area in
which D can be found(hence, Ds direction)
S transmits the data packet to all its
neighbors in Ds directionEach neighbor does the same till D is
reached
DREAM: Routing a Data
-
7/28/2019 adhoc netwrk ppt(1)
73/175
DREAM: Routing a DataPacket
-
7/28/2019 adhoc netwrk ppt(1)
74/175
DREAM, Strengths
First of its kind: after that, the deluge!
Robustness: multiple routes to thedestination
directional flooding
-
7/28/2019 adhoc netwrk ppt(1)
75/175
DREAM, Weaknesses
It is flooding, although only directional
It is not that scalable, geographic infoupdates have to be
periodically
transmitted (even if mechanisms to
limit such overhead are enforced)
-
7/28/2019 adhoc netwrk ppt(1)
76/175
Location-Aided Routing (LAR)
Exploits location information to limit scope ofRREQ flood
Expected Zone: region that is expected to holdthe current
location of the destination Expected region determined based on
potentially old
location information, and knowledge of thedestinations speed
RREQs limited to a Request Zonethat contains
the Expected Zone and location of the sendernode
-
7/28/2019 adhoc netwrk ppt(1)
77/175
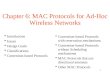
LAR: Expected Zone
D
D'
r
D = last known location of node
D, at time t0
D' = location of node D at current
time t1, unknown to node S
r = (t1 t0) * estimate of Ds speed
Expected Zone
-
7/28/2019 adhoc netwrk ppt(1)
78/175
LAR
The request zone is the smallest rectangle thatincludes the
current location of the source andthe expected zone
Only nodes within the request zone forward
route requests Node A does not forward RREQ, but node B does
Request zone explicitly specified in the RREQ
Each node must know its physical location todetermine whether it
is within the request zone
LAR R t Z
-
7/28/2019 adhoc netwrk ppt(1)
79/175
LAR: Request Zone
D
D'
r
S
Request Zone
Network Space
BA
(XS, YS)(XD+ r, YS)
(XS, YD + r) (XD+ r, YD+ r)
-
7/28/2019 adhoc netwrk ppt(1)
80/175
LAR, Possible Failures
If route discovery using the smallerrequest zone fails to find a
route, thesender initiates another route discovery
(after a timeout) using a larger requestzone The larger request
zone may be the entire
network
Rest of route discovery protocol similar toDSR
-
7/28/2019 adhoc netwrk ppt(1)
81/175
LAR, the Routing
The basic proposal assumes that, initially, locationinformation
for node X becomes known to Y only duringa route discovery
This location information is used for a future
routediscovery
Variations
Location information can also be piggybacked on anymessage from
Y to X
Y may also proactively distribute its location information
-
7/28/2019 adhoc netwrk ppt(1)
82/175
LAR, Pros and Cons
Advantages
Reduces the scope of RREQ flood
Reduces overhead of route discoveryDisadvantages
Nodes need to know their physical locations
-
7/28/2019 adhoc netwrk ppt(1)
83/175
-
7/28/2019 adhoc netwrk ppt(1)
84/175
In a sensor network we seek..
For solutions which scaleWhich are energy savingWhich are well
integrated with awake/asleep schedulesWhich do not require to
maintain routing tablesWhich are simple
Solutions such as AODV and DSR have been proven to work well
iffthey exploit intensively caching and promiscuous mode
operation(energy inefficient work by L. Feeney et al, 2001) and
have beenshown not to scale to the volumes of nodes expected in
sensor networks
(work by E. Belding Royer and S.J. Lee)What can we use?
communication sensors sink Info such as localization and some level
of synchronization often needed
by the application (if I sense an event I have to say WHERE and
WHEN itoccurred, otherwise the information is not very
interesting)
-
7/28/2019 adhoc netwrk ppt(1)
85/175
An example: GeRaF
Integrates
geographic routing
awake/asleep schedule MAC
How do nodes alternate between
awake and asleep states? According toa duty cycle (time ON/time
ON+ OFF)
ON ON
OFF OFF
GeRaF basic idea
-
7/28/2019 adhoc netwrk ppt(1)
86/175
GeRaF basic idea
Geographic routing:each node needs toknow its location,
thedestination (sink)
location, and thelocation of whom istransmitting(communicated in
thepacket)Greedy approach:
tries to select relaysso to advance asmuch as possibletoward the
destinationat each hop
-
7/28/2019 adhoc netwrk ppt(1)
87/175
GeRaF: operations
Main problem to be solved: how to make acontention-based
scheme/routing work in thepresence of sleep modes Flat solution
Integrated MAC/routing/awake-asleep but awake-asleep schedule
and routing decoupled each nodedoes not know its neighbor and their
schedules low overhead
Tightly integrated with the routing layer (no
clear separation really) Without requiring routing
tables/routing table updates
Based on the knowledge of the nodes location and onthe knowledge
of the sink location
Example of GeRaF operation
-
7/28/2019 adhoc netwrk ppt(1)
88/175
Example of GeRaF operationRTS invites all awake neighbors to
become
a relayNodes in best position should win
Nodes within tx range are divided in areas
depending on how close they are to the finaldestination (the
closest the better as relay)
Need of location awareness
GeraF operation
-
7/28/2019 adhoc netwrk ppt(1)
89/175
GeraF operationNode i sends RTS with the identity of the area
it
is polling now (starting from the closer to the sink,among the
slices in which its tx range has beendivided)
Each node, upon receiving the RTS, decides
whether it belongs to the polled area or not(based on location
info)
Only nodes in the polled area answer with a CTS No node answers
node i polls next area (no node
available for forwarding in the area-there are no nodesor they
are sleeping)
One answer, CTS correctly received, send DATA
Multiple answer COLLISION, sender sends a collision
packet, MAC needed to solve collision (next slide)
GeraF operation (how to
-
7/28/2019 adhoc netwrk ppt(1)
90/175
handle collision)
1)A node receiving a collision packet tosses acoin and with
probability p transmits a CTS iffit was participating to the
previous phase (it
had previously sent a CTS resulting incollision) if only one
node answers node i sends data
If no node answers node i asks these nodes to
toss a coin again.. if more nodes answer COLLISION.
Collision
packet is sent. GO TO 1) (only the nodes whichhave lead to
collision survive to the next phase)
-
7/28/2019 adhoc netwrk ppt(1)
91/175
What If
All areas are polled unsuccessfully?
Try again after some time (exponentialbackoff)
Can I always reach the destination inthis way?
-
7/28/2019 adhoc netwrk ppt(1)
92/175
What if (answer)
No. Here is
An example
Solutions? (mechanisms have to be added torecognize the problem,
do backtracking andtry another route)
sink
Tx radius
How to solve dead-endsA problem only at low density
-
7/28/2019 adhoc netwrk ppt(1)
93/175
A problem only at low density
We can set a maximum number of attempts
to find a relay. When a node fails to find arelay it starts
decreasing its duty cycle/or theprobability to propose itself as
relay overtime nodes along paths to dead-ends are lessand less
selected as next hop relays andother paths able to bring to the
destinationare instead found
Still..we may have problems
sink
Tx radius
GeRaf performance
-
7/28/2019 adhoc netwrk ppt(1)
94/175
GeRaf performance
square area 320m x 320m
Transmission range=40m
100-1000 randomly deployed nodes (avgdegree 5-50)
Duty cycle =0.01,0.1,0.5
Comparable costs for tx/rx/idle
Poisson packet arrivalChannel data rate 38Kbps
Casari, Marcucci,Nati, Petrioli, Zorzi IEEE MILCOM 2005
GeRaf performance d=0 1
-
7/28/2019 adhoc netwrk ppt(1)
95/175
GeRaf performance, d=0.1Casari, Marcucci,Nati, Petrioli, Zorzi
IEEE MILCOM 2005
GeRaf performance d=0 1
-
7/28/2019 adhoc netwrk ppt(1)
96/175
GeRaf performance, d=0.1Casari, Marcucci,Nati, Petrioli, Zorzi
IEEE MILCOM 2005
GeRaf performance d=0 1
-
7/28/2019 adhoc netwrk ppt(1)
97/175
GeRaf performance, d=0.1Casari, Marcucci,Nati, Petrioli, Zorzi
IEEE MILCOM 2005
Con i meccanismi per evitare dead end si sale a % di
successfullyDelivered packets nel caso di 200 nodi pari a 93-97%
(evitandoNel tempo cammini che portino a dead ends). Non si risolve
ilProblema nel caso n=100. Soluzione completa in uno schema che
abbiamo proposto: ALBA.
-
7/28/2019 adhoc netwrk ppt(1)
98/175
-
7/28/2019 adhoc netwrk ppt(1)
99/175
Localization in sensornetworks
Thanks to Prof. Mani Srivastava
These slides have been derived
From his tutorial on sensor networks
Given at Rome Un. On July 2003
LocalizationUseful info
-
7/28/2019 adhoc netwrk ppt(1)
100/175
Useful info Helps with some protocols (e.g. GeraF)
Needed for being able to identify where events occurWhy not just
GPS (Global Positioning System) atevery node? Large size
High power consumption Works only when LOS to satellites (not in
indoor, heavy
foliage)
Over kill often only relative position is needed (e.g.enough to
know that relative to a coordinate systemcentered in the sink the
event occurred in a position(x,y). Starting from relative info if
some nodes haveglobal coordinates global coordinates of events can
beinferred.
Works only on earth
Localization
-
7/28/2019 adhoc netwrk ppt(1)
101/175
Localization
Basic step is to evaluate distance betweentwo nodes (ranging).
Different techniquesdepending on the available HW: AoA (e.g.
directional antennas)
RSS ToA
Range free approaches (number of hops
between nodes used to estimate thedistance between them without
using anyextra HW)
Techniques for LocationSensing (AoA)
-
7/28/2019 adhoc netwrk ppt(1)
102/175
Sensing (AoA)Measure direction of landmarks Simple geometric
relationships can be used to
determine the location by finding the intersectionsof the
lines-of-position
e.g. Radiolocation based on angle of arrival (AoA)
measurements of beacon nodes (e.g. basestations) can be done
using directive antennas + a compass
need at least two measurementsBS
BS
BS
MS
12
3
Measure distance to landmarks, or RangingTechniques for Location
Sensing (RSS or ToA)
-
7/28/2019 adhoc netwrk ppt(1)
103/175
, g g
e.g. Radiolocation using signal-strength or time-of-flight also
done with optical and acoustic signals
Distance via received signal strength use a mathematical model
that describes the path loss attenuation with
distance each measurement gives a circle on which the MS must
lie
use pre-measured signal strength contours around fixed
basestation(beacon) nodes
can combat shadowing location obtained by overlaying contours
for each BS
Distance via Time-of-arrival (ToA) distance measured by the
propagation time
distance = time * c
each measurement gives a circle on which the MS must lie active
vs. passive
active: receiver sends a signal that is bounced back so that the
receiver knowsthe round-trip time
passive: receiver and transmitter are separate
time of signal transmission needs to be known
N+1 BSs give N+1 distance measurements to locate in N
dimensions
d l d SS
-
7/28/2019 adhoc netwrk ppt(1)
104/175
Radiolocation via ToA and RSSI
x1
x2
x3
d1
d3
d2
MS
BS
BS
BS
But what if the circles
do not intersect due tomeasurement errors (e.g.
due to fading etc.)?will have to identify the best guess given
errors
L i i 3D
-
7/28/2019 adhoc netwrk ppt(1)
105/175
Location in 3D
L ti i 3D
-
7/28/2019 adhoc netwrk ppt(1)
106/175
Location in 3D
L ti i 3D
-
7/28/2019 adhoc netwrk ppt(1)
107/175
Location in 3D
A possible solution: AbsoluteL li ti
-
7/28/2019 adhoc netwrk ppt(1)
108/175
Localization
Beacon
Unkown Location
Randomly Deployed Sensor Network
Beacon nodes
A small fraction of the nodesis aware of their locations
Rest need to collaborate to
estimate their locations
Atomic Multilateration
-
7/28/2019 adhoc netwrk ppt(1)
109/175
22
,, )()( uiuiiuiu yyxxrf
2
,min),( iuuu fyxF
),( uu yx - initial position estimate for node u
u
1
2
3
1,ur
3,ur
2,ur
Beacon nodewith known
location
Our objective function is:
Metrica di interesseErrore quadratico medio
Nodi che hanno
almeno 3 vicini
(in 2D, se si usaAd esempio RSS)
beacon
possono stimare
la loro posizione(triangolarization)
In presenza di errori
Iterative Multilateration
-
7/28/2019 adhoc netwrk ppt(1)
110/175
Iterative MultilaterationNodes that estimate their locations can
become
beacons and help other nodes discover theirlocations.
Some observations: Can work for small networks, if ranging is
accurate
Energy efficient
Still requires quite a lot of initial beacons
Suffers from error accumulation
Bad geometry yields bad results =>
unpredictableperformance
Still a useful primitive for Distributed Collaborative
Multilateration
Primo approccio semplice, vasta letteratura
Ref: based on slides by Andreas Savvides
R f l li ti
-
7/28/2019 adhoc netwrk ppt(1)
111/175
Range free localization
Non usa ranging, ma solo informazioniche si possono ottenere
tramite algo dirouting tradizionali
Idee su come possa funzionare?
Qualche idea sullapproccio
-
7/28/2019 adhoc netwrk ppt(1)
112/175
Qualche idea sull approccio Servono degli anchor, nodi che
conoscono la propria posizione in unsistema di coordinate
comune
X1,Y1
X2,Y2
X3,Y3
Qualche idea sullapproccio
-
7/28/2019 adhoc netwrk ppt(1)
113/175
X1,Y1
X2,Y2
X3,Y3
Tutti I nodi calcolano il numero min. di hop tra
loro e gli anchor Anche gli anchor lo fanno tra loro
Qualche idea sullapproccio
-
7/28/2019 adhoc netwrk ppt(1)
114/175
Anchor A: conosco la posizione esatta mia edegli altri anchor,
il num. di hop, posso stimare la
lunghezza media di un hop
Questa informazione e usata per stimare ledistanze da tutti I
nodi agli anchor. Sulla base ditali distanze, le corrette
coordinate degli anchor,per triangolarizzazione ciascun nodo stima
leproprie coordinate
Pro: Non serve extra HW
Cons: si perde in precisione
-
7/28/2019 adhoc netwrk ppt(1)
115/175
Scalability Problems andCl t i
-
7/28/2019 adhoc netwrk ppt(1)
116/175
Clustering
What happens to protocols when the numberof network nodes grows?
Especially crucial in WSNs
A traditional networking solution: Hierarchicalorganization of
the nodes
Network nodes are grouped into clusters
Some nodes, locally the best, are selected
to coordinate the clustering process:Clusterheads
How to Select the Best Nodes
-
7/28/2019 adhoc netwrk ppt(1)
117/175
How to Select the Best Nodes
Independence of the clusterheads
Dominance of the clusterheads
Possibility to express preferences
Distributed operations
Fast and simple implementation
Previous Approaches
-
7/28/2019 adhoc netwrk ppt(1)
118/175
Previous Approaches
Heuristics based on Independent Sets
Minimum ID approach (Gerla & al.)
Maximum degree (Ephremides & al.)Heuristics based on
Dominating Sets
The concept of spine
Minimum connected dominating set
Maximum Independent Set(MIS)
-
7/28/2019 adhoc netwrk ppt(1)
119/175
(MIS)
A subset Vof the vertices V of a graphG=(V,E) is independent
when for eachu,v V the edge {u,v} E
MIS is an Optimization Problem
Input: A Graph G=(V,E) with n vertices
Output: A subset V of V that isindependent and has maximum
size
MIS: Hardness
-
7/28/2019 adhoc netwrk ppt(1)
120/175
MIS: Hardness
No known algorithm computer a MIS inpolynomial time
Need for approximate solutions
And approximation algorithm is an algorithmthat produces a
solution that is not optimal,but that approximates it
We sacrifice optimality in favor of a goodsolution that can be
computed efficiently
MIS is HARD to Approximate
-
7/28/2019 adhoc netwrk ppt(1)
121/175
MIS is HARD to Approximate
Bad news
Not only MIS is computationally hard
It is also hard to approximate:Approximate solutions are not so
good
They are unboundedly far from the optimum
We consider the simple greedy heuristicfor the MIS
Greedy Heuristic for MIS 1
-
7/28/2019 adhoc netwrk ppt(1)
122/175
Greedy Heuristic for MIS, 1
Select the vertex with minimum degreeand put it in the MIS
The degree of a vertex is the number of itsneighbors Cardinality
of its adjacency list
Keep going till all the vertices are either in
the MIS or COVERED by a vertices in theMIS
Greedy Heuristic for MIS 2
-
7/28/2019 adhoc netwrk ppt(1)
123/175
Greedy Heuristic for MIS, 2
MIS(V,E,d)// d is the vector of degrees
mis =
while V dov = vertex with min degree
mis = mis U {v}
V = V {{v} U N(v)}return mis
Greedy MIS: Maximal Solution
-
7/28/2019 adhoc netwrk ppt(1)
124/175
Greedy MIS: Maximal Solution
The greedy solution provides a maximalindependent set An
independent set is maximal when, if you add a
vertex, the set is no longer independentYou cannot make an
maximal independent set bigger
This solution is also a minimal dominating set A dominating set
D subset of V is a set such that a
vertex v V is either in D or it has a neighbor in D
Solutions we will see are variant of thisapproach
On MDSwhat if we look at UDGgraphs?
-
7/28/2019 adhoc netwrk ppt(1)
125/175
graphs?
Bad news: Still computationally hard
Better news: Minimum DS It is
approximable up to a constant It means that the ratio between
the size of
a DS computed by MIS greedy on UDGsand the size of a MDS is <
c, c a constant
This constant is 5
Greedy MIS for MDS on UDGis 5 approximable 1
-
7/28/2019 adhoc netwrk ppt(1)
126/175
is 5-approximable, 1
Key fact: In a UDG disk (radius 1) thereare at most 5
independent nodes
Consider an Optimal solution and aGreedy solutionSince Opt is
dominant, it dominatesGreedy
Assign every vertex of Greedy to onedominator in Opt (choose one
if more)
Greedy MIS for MDS on UDGis 5 approximable 2
-
7/28/2019 adhoc netwrk ppt(1)
127/175
is 5-approximable, 2
For each u in Opt consider its assignedvertices v1(u), v2(u), ,
vk(u) of Greedy
How big is k?Well, all vi(u) must be distant 1 from uand they
also have to be independent
Greedy: at most 5 times bigger thanOpt
MIS and Dominating Sets andWireless Networks
-
7/28/2019 adhoc netwrk ppt(1)
128/175
Wireless Networks
UDGs model ad hoc networks
IS and DS are useful for clustering ad hoc
networks Gives the network a hierarchical organization
Decreases the amount of information at each node
Enhances scalability
Helps in resource assignment
Advantages of hierarchicalorganization
-
7/28/2019 adhoc netwrk ppt(1)
129/175
organization
routing always through the clusterhead
data aggregation at the clusterhead
easy to locally synchronize nodeswithin the cluster, using TDMA
MACprotocol for intra-cluster communicationand different MAC
protocols (e.g.CDMA) for inter-cluster communications
MWIS-Based Clustering
-
7/28/2019 adhoc netwrk ppt(1)
130/175
MWIS-Based Clustering
MWIS = Maximal Weight IndependentSetClustering selection based
on generic
weights (real numbers > 0)
Mobility/node related parameters
Generalizes previous IndependentSet solutions
Two Protocols
-
7/28/2019 adhoc netwrk ppt(1)
131/175
Two Protocols
Distributed Clustering Algorithm (DCA) Quasi-mobile networks,
periodical
reclustering. Allow complexity analysis, fast
and simpleDistributed and Mobility-AdaptiveClustering (DMAC)
Algorithm Same rules/procedures for clustering set
up and maintenance, adaptive to nodesmobility and node/link
failures
DCA: Distributed ClusteringAlgorithm 1
-
7/28/2019 adhoc netwrk ppt(1)
132/175
Algorithm, 1
Assumptions
Knowledge of IDs and weights of one-hop
neighbors
Broadcast transmission of a packet in finitetime (a step)
Nodes do not move during clustering
DCA 2
-
7/28/2019 adhoc netwrk ppt(1)
133/175
DCA, 2
(Only) Two messages:
CH(v): Sent by a clusterhead v
JOIN(u,t): Sent by ordinary node u when itjoins the cluster of
clusterhead t
Three (simple) procedures:
Init (start up)
OnReceivingCH(v), OnReceivingJOIN(u,v)(message triggered)
DCA
-
7/28/2019 adhoc netwrk ppt(1)
134/175
DCA
Ogni nodo conosce i suoi vicini ed il loro pesoUn nodo init se
ha il peso pi grande deipesi dei suoi nodi viciniGli init node
diventano clusterhead e invitanoi loro vicini a far parte del loro
clusterUn nodo x aspetta di ricevere messaggi daivicini di peso
maggiore prima di prendere unadecisione Se un vicino di peso
maggiore lo invita a far parte
del suo cluster allora x entra a far parte del clusterdel vicino
di peso maggiore che lo contatta(inviando un messaggio di Join)
nodo ordinario
Altrimenti diventa clusterhead lui stesso e inviaun messaggio di
CH
DCA
-
7/28/2019 adhoc netwrk ppt(1)
135/175
DCA
Due tipi di messaggi
CH(v) usato da un nodo v per rendereconsapevoli i suoi vicini
del fatto che ha
assunto il ruolo di clusterhead
JOIN(v,u) usato dal nodo v percomunicare ai suoi vicini che sar
parte di
un cluster il cui clusterhead il nodo u
DCA
-
7/28/2019 adhoc netwrk ppt(1)
136/175
DCA
Variabili Cluster(v) indica linsieme dei nodi che fanno
parte
del cluster di cui clusterhead v
Clusterhead una variabile che identifica ilclusterhead del mio
cluster
Ch(u) vero quando o ha mandato un messaggioCH (u==v) oppure
quando ha ricevuto un
messaggio di CH dal nodo u La variabile booleana Join (u,t) vera
se il nodo v
ha ricevuto un JOIN(u,v) dal nodo u
DCA-Procedure (eseguite dalnodo v)
-
7/28/2019 adhoc netwrk ppt(1)
137/175
nodo v)
Init
Se tutti i nodi vicini hanno un peso
minore di vinvia CH(v);
Cluster(v)=Cluster(v)U{v};
Ch(v)=true;Clusterhead=v;
DCA-Procedure (eseguite dalnodo v)
-
7/28/2019 adhoc netwrk ppt(1)
138/175
nodo v)
On receiving CH(u)
Ch(u)=true;
Se u ha un peso maggiore di me e ivicini di peso maggiore di v
con pesomaggiore di u hanno tutti mandato unJoin, allora
Clusterhead=u;invia JOIN(v,Clusterhead);
DCA-Procedure (eseguite dalnodo v)
-
7/28/2019 adhoc netwrk ppt(1)
139/175
nodo v)On receiving JOIN(u,t)
Join(u,t)=true;Se v un clusterhead allora se t==v
Cluster(v)=Cluster(v)U{u};Se ho ricevuto Join da tutti i vicini
pi piccoli EXIT
Altrimenti si verifica se tutti i vicini di peso maggiore hanno
presouna decisione sul ruolo.
Se questo il caso e tutti i vicini di peso maggiore hannomandato
JOIN
mandiamo un CH(v);Cluster(v)=Cluster(v)U{v};Clusterhead =v;Se si
ricevuto JOIN da tutti i vicini minori EXIT.
Altrimenti se uno o pi vicini di peso maggiore hanno mandato
unCH
Clusterhead=il vicino di peso maggiroe con peso pigrande tra
quelli che sono diventati clusterhead e mi hannoinvitato.
manda JOIN(v,Clusterhead);
EXIT;
Example
-
7/28/2019 adhoc netwrk ppt(1)
140/175
Example
4(9)
5(8)
7(5)
6(1)
2(3)
1(6)
8(1)
3(2)
Cluster 1Cluster 2
Cluster 3
clusterhead clusterhead
clusterhead
I Step II Step III Step IV Step V Step
DCA: Provable Properties
-
7/28/2019 adhoc netwrk ppt(1)
141/175
DCA: Provable Properties
Consider
t: V {1,2,3, , 2k}
V = set of network nodes, k = number of
clustersProposition: Each node v in V sends exactlyone message
by t(v) steps
Corollary 1: DCA message complexity is n
=|V|Corollary 2: DCA terminates correctly in atmost 2k steps
(
-
7/28/2019 adhoc netwrk ppt(1)
142/175
Node/Link Failures: DMAC
DMAC is for clustering set up ANDmaintenance
Nodes can move during the clustering
Each node reacts to Reception of a message
Presence of a new link
Link failure
Same assumptions of DCA, plus knowledge ofneighbors roles (no
role = ordinary role)
Quando muore un nodo ordinario se ne tiene solo tracciaQuando
muore un gw bisogna riselezionare un nuovo gwQuando muore un CH un
nodo che stava in quel clusterhead
vede se c un altro vicino CH a cui riaffiliarsi ed in casosi
affilia a quello di peso maggioreAltrimenti se ha il peso maggiore
tra i vicini restanti diventa CHLarrivo di un nuovo nodo o la
comparsa di un link puoCostringere a manutenzioni del backbone (per
mantenere la
proprieta che il nodo di peso maggiore CH)
DMAC: The Procedures
-
7/28/2019 adhoc netwrk ppt(1)
143/175
DMAC: The Procedures
INIT
Link-dependent procedures:
Link_Failure New_Link
Message-triggered procedures:
OnReceivingCH(v) OnReceivingJOIN(u,t)
Joining Clusterheads: DynamicBackbone
-
7/28/2019 adhoc netwrk ppt(1)
144/175
Backbone
A theorem from Chlamtac and Farago:
If a network is connected, and DCA is
used, then if and only if eachclusterhead is linked to all
theclusterheads at most three hops away,the resulting backbone
network is
connected
Example
-
7/28/2019 adhoc netwrk ppt(1)
145/175
Example
4(9)
5(8)
7(5)
6(1)
2(3)
1(6)
8(1)
3(2)
Cluster 1Cluster 2
Cluster 3
clusterhead clusterhead
clusterhead
I Step II Step III Step IV Step V Step
-
7/28/2019 adhoc netwrk ppt(1)
146/175
4 Backbone Formation Protocols
-
7/28/2019 adhoc netwrk ppt(1)
147/175
4 Backbone Formation Protocols
3 representatives of major approaches Selection of independent
set of nodes and
backbone construction (DCA)
Rich dominating set formation and pruning(WuLi)
Two-phase algorithm with theoreticalguarantees (WAF)
1 proposal after the performancecomparison (DCA-S)
Distributed Clustering Algorithm(DCA)
-
7/28/2019 adhoc netwrk ppt(1)
148/175
(DCA)
Distributed and localized implementationof the greedy for
independent set
Takes node status into account for node
selectionIndependent nodes are joined into aconnected backbone
(connectivity is
guaranteed) via gatewaysLow degree of parallelism
(dependencychains)
A DCA Backbone
-
7/28/2019 adhoc netwrk ppt(1)
149/175
A DCA Backbone
WuLi: Wu and Li protocol
-
7/28/2019 adhoc netwrk ppt(1)
150/175
WuLi: Wu and Li protocol
Distributed and localized protocols forforming a connected
dominating set
Build a rich connected dominating setApplies localized rules for
pruningunnecessary nodes/links
High degree of parallelism (alllocalized)
WuLi: Wu and Li protocol
-
7/28/2019 adhoc netwrk ppt(1)
151/175
WuLi: Wu and Li protocol
Distributed and localized protocols forforming a connected
dominating set
Build a rich connected dominating set
Applies localized rules for pruningunnecessary nodes/links
High degree of parallelism (alllocalized)
If a vertex v has two neighbors which are notin visibility range
it enters the set C
WuLi: Wu and Li protocol
-
7/28/2019 adhoc netwrk ppt(1)
152/175
u u a d p o o o
Distributed and localized protocols forforming a connected
dominating set
Build a rich connected dominating set
Applies localized rules for pruningunnecessary nodes/links
High degree of parallelism (alllocalized)What ia needed is, from
the neighbors, whetherthey are in C and their list of
neighbors.
WuLi-dominance propertyda On Calculating Connected Dominating
Set for Efficient Routing in Ad Hoc Wireless Networks, Wu and
Li
-
7/28/2019 adhoc netwrk ppt(1)
153/175
Assume V is the set of vertices that are marked T in V, i.e.,
the set of vertices whichinitially enter the CDS since they have at
least two neighbors which are notneighbors of each other. The
reduced graph G is the subgraph of G induced by V.The following two
theorems show that G is a dominating set of G and it
isconnected.
THEOREM 1: Given a G = (V, E) that is connected, but not
completely connected,the vertex subset V, derived from the marking
process, forms a dominating set of G.PROOF: Randomly select a
vertex v in G. We show that v is either in V (a set ofvertices in V
that are marked T) or adjacent to a vertex in V . Assume v is
marked F,if there is at least one neighbor marked T, the theorem is
proved. When all itsneighbors are marked F, we consider the
following two cases: (1) All the othervertices in G are neighbors
of v. Based on the marking process and the fact thatm(v)=F, all
these neighbors must be pairwise connected, i.e., G is
completelyconnected. This contradicts to the assumption that G is
not completely connected.(2) There is at least one vertex u in G
that is not adjacent to vertex v. Construct ashortest path,
{v,vi,v2, . . . . u}, between vertices v and u. Such a path always
existssince G is a connected graph. Note that v2 is u when v and u
are 2-distance apart inG. Also, v and v2 are not directly
connected; otherwise, {v, v2,. .. u} is a shorterpath between v and
u. Based on the marking process, vertex vi, with both v and v2as
its neighbors, must be marked T. Again this contradicts the
assumption that vsneighbors are all marked F. CVD
WuLi (first step produces a CDS)
-
7/28/2019 adhoc netwrk ppt(1)
154/175
( p p )
THEOREM 2: The reduced graph G = G -V is aconnected graph.PROOF:
We prove this theorem by contradiction.Assume G is disconnected and
v and u are twodisconnected vertices in G. Assume dis
G(v,u) =k+1 >
1 and{v,v1,v2,...,vk,u} is a shortest path betweenvertices v and
u in G. Clearly, all v1,v2, . . ..vk aredistinct and among them
there is at least one vi suchthat m(vi) = F (otherwise, v and u are
connected inG). On the other hand, the two adjacent vertices of
vi, vi-1 and vi+i, are not connected in G (otherwise,{v, ..vi,
vi+1, . . . . vk,u} would be a shorter path).Therefore, m(vi) =T
based on the marking process.
WuLi: Wu and Li protocol
Rule 1: for each pair of nodes u and v in Cthe one with the
smallest ID, say v, can be removed
-
7/28/2019 adhoc netwrk ppt(1)
155/175
p
Distributed and localized protocols forforming a connected
dominating set
Build a rich connected dominating set
Applies localized rules for pruningunnecessary nodes/links
High degree of parallelism (alllocalized)
from C if v and all its neighbors are covered by u
Rule 2: Assume nodes u,v, and w are in C andassume that vs ID is
the smallest. If u and w areneighors of v and are in each other
transmissionrange and if each neighbor of v is covered by uand w,
then v can be removed from C.
Mantengono la propriet di connessione e di dominanza
WuLi: Wu and Li protocol
-
7/28/2019 adhoc netwrk ppt(1)
156/175
p
Distributed and localized protocols forforming a connected
dominating set
Build a rich connected dominating set
Applies localized rules for pruningunnecessary nodes/links
High degree of parallelism (alllocalized)What ia needed is, from
the neighbors, whetherthey are in C and their list of
neighbors.
A WuLi Backbone
-
7/28/2019 adhoc netwrk ppt(1)
157/175
WAF: Wan, Alzoubi andFrieder
-
7/28/2019 adhoc netwrk ppt(1)
158/175
Two phases Leader election: One node is chosen
among all network nodes to be the root ofa tree
Nodes at different levels of the trees canbe chosen to form a
connected dominatingset
The leader election tree is quite
expensiveVery low degree of parallelism
A WAF Backbone
-
7/28/2019 adhoc netwrk ppt(1)
159/175
DCA-S: DCA Sparsified
-
7/28/2019 adhoc netwrk ppt(1)
160/175
p
Build a connected dominating set (say, withDCA) and consider its
spanned sub-graph H(include gateways)Erds: If a graph does not have
small cycles
then it is sparseFind and break small cycles (small=log n) In
practice we search and break cycles with 3 and
4 links
Breaking cycles does not compromiseconnectivity
Simulation Results
-
7/28/2019 adhoc netwrk ppt(1)
161/175
Metrics (all averages)
1. Protocol duration
2. Operation overhead (in bytes)
3. Energy consumption (per node)
4. Backbone size
5. Route length
6. Backbone robustness (node deaths fordisconnections)
Simulation Results, 2
-
7/28/2019 adhoc netwrk ppt(1)
162/175
,
Parameters of ns2-based simulations
Nodes: 300, IST EYES prototype Tx range: 30m
Initial (residual) energy: 1J
Tx, Rx, idle power: 24, 14.4, 0.015 (mW)
Area: 200 x 200m
Six scenarios with increasing densities(avg. degrees: 3.5 to
20)
Protocol Duration
-
7/28/2019 adhoc netwrk ppt(1)
163/175
WuLi is fastest Simple operation; parallelism
DCA: Reasonably fast
Possible dependencies and gateway selectionDCA-S: As DCA The
sparsification phase is executed by fewer
nodes and requires little info exchange
WAF: Slower Non-trivial leader election
Protocol Duration, 2
-
7/28/2019 adhoc netwrk ppt(1)
164/175
Protocol Overhead
-
7/28/2019 adhoc netwrk ppt(1)
165/175
Protocol Overhead, 2
-
7/28/2019 adhoc netwrk ppt(1)
166/175
Average number of protocol bytes pernode
WuLi: Best performing Simple list exchangeDCA(-S): Almost twice
as much Bit more info needed (weight, IDs, )
WAF Leader election complexity
Energy Consumption
-
7/28/2019 adhoc netwrk ppt(1)
167/175
Important metric per backbone set upand maintenance
Similar to overhead results
WuLi and DCA perform quite well
DCA-S performs similarly: No difference
in breaking cycles with 3 or 4 linksWAF: High consumption due to
firstphase
Energy Consumption, 2
-
7/28/2019 adhoc netwrk ppt(1)
168/175
Backbone Size
-
7/28/2019 adhoc netwrk ppt(1)
169/175
Important metric: Aggregation andawake/asleep cycles
Small backbone + role rotation: key for
WSNs
Decrease with n increasing (biggerclusters)
WAF: Slimmer backbone (tree like)
DCA-S, 4 < DCA-S, 3 < DCA < WuLi
Backbone Size, 2
-
7/28/2019 adhoc netwrk ppt(1)
170/175
Backbone Robustness
-
7/28/2019 adhoc netwrk ppt(1)
171/175
Number of nodes needed to disconnect thebackbone
Useful for planning backbone re-orgs
Increases with network densityWuLi and DCA: More robust
Resilient to up to 25 death when n = 300
WAF: Quite a disaster (tree-like topologies)DCA-S: In the
middle
Backbone Robustness, 2
-
7/28/2019 adhoc netwrk ppt(1)
172/175
Route Length
-
7/28/2019 adhoc netwrk ppt(1)
173/175
Flat topology (visibility graph) as abase
Expected increase: Hierarchy routes arelonger
DCA & WuLi: 7 to 34.7% longer routes
DCA-S: Up to 9% more than DCAWAF: Up to 33.4% longer than
DCA
Route Length, 2
-
7/28/2019 adhoc netwrk ppt(1)
174/175
To Go
-
7/28/2019 adhoc netwrk ppt(1)
175/175
Hierarchical organization is effective forprolonging network
lifetime
Four protocols for backbone formation: DCA, WuLi, WAF and
DCA-S
Nice theoretical features hard to implement
Simple solutions (WuLi, DCA): Good startingpoint for efficient
implementations
DCA-S: Slimmer backbone at a reasonable cost