-
8/18/2019 advanes in Turbulent Modelling
1/40
Review
Recent advances on the numerical modelling of turbulent
flows
C.D. Argyropoulos a,⇑, N.C. Markatos b,c,⇑
a Department of Chemical Engineering, Imperial College London,
South Kensington Campus, London SW7 2AZ, UK b Computational
Fluid Dynamics Unit, School of Chemical Engineering, National
Technical University of Athens, 9 Iroon Polytechniou Str., Zografou
Campus,
15780 Athens, Greecec Metropolitan College, School of
Engineering, 74 Sorou Str., Marousi, Athens 15125, Greece
a r t i c l e i n f o
Article history:
Received 15 February 2013
Received in revised form 9 June 2014
Accepted 7 July 2014
Available online 14 July 2014
Keywords:
Turbulence modelling
DNS
LES
URANS
DES
Reynolds stress models
a b s t r a c t
This paper reviews the problems and successes of computing
turbulent flow. Most of the
flow phenomena that are important to modern technology involve
turbulence. The review
is concerned with methods for turbulent flow computer
predictions and their applications,
and describes several of them. These computational methods are
aimed at simulating
either as much detail of the turbulent motion as possible by
current computer power or,
more commonly, its overall effect on the mean-flow behaviour.
The methods are still being
developed and some of the most recent concepts involved are
discussed.
Some success has been achieved with two-equation models for
relatively simple hydro-
dynamic phenomena; indeed, routine design work has been
undertaken during the last
three decades in several applications of engineering practise,
for which extensive studies
have optimised these models.
Failures are still common for many applications particularly
those that involve strong
curvature, intermittency, strong buoyancy influences,
low-Reynolds-number effects, rapidcompression or expansion, strong
swirl, and kinetically-influenced chemical reaction. New
conceptual developments are needed in these areas, probably
along the lines of actually
calculating the principal manifestation of turbulence, e.g.
intermittency. A start has been
made in this direction in the form of ‘multi-fluid’ models, and
full simulations.
The turbulence modelling approaches presented here are,
Reynolds-Averaged
Navier–Stokes (RANS), two-fluid models, Very Large Eddy
Simulation (VLES), Unsteady
Reynolds-Averaged Navier–Stokes (URANS), Detached Eddy
Simulation (DES) and some
interesting, relatively recent, hybrid LES/RANS techniques.
A large number of relatively recent studies are considered,
together with reference to the
numerical experiments existing on the subject.
The authors hope that they provide the interested reader with
most of the appropriate
sources of turbulence modelling, exhibiting either as much
detail as it is possible, by means
of bibliography, or illustrating some of the most recent
developments on the numerical
modelling of turbulent flows. Thus, the potential user has the
appropriate information,
for him to select the suitable turbulence model for his own case
of interest.
2014 Elsevier Inc. All rights reserved.
http://dx.doi.org/10.1016/j.apm.2014.07.001
0307-904X/ 2014 Elsevier Inc. All rights reserved.
⇑ Current address: Metropolitan College, School of Engineering,
74 Sorou Str., Marousi, Athens 15125, Greece (N.C. Markatos).
Tel./fax: +30 210 7723126.
E-mail
addresses: [email protected] (C.D.
Argyropoulos), [email protected] (N.C. Markatos).
URL: http://www.amc.edu.gr (N.C. Markatos).
Applied Mathematical Modelling 39 (2015) 693–732
Contents lists available at ScienceDirect
Applied Mathematical Modelling
j o u r n a l h o m e p a g e : w w w . e l s e v i e r .
c o m / l o c a te / a p m
http://dx.doi.org/10.1016/j.apm.2014.07.001mailto:[email protected]:[email protected]://www.amc.edu.gr/http://dx.doi.org/10.1016/j.apm.2014.07.001http://www.sciencedirect.com/science/journal/0307904Xhttp://www.elsevier.com/locate/apmhttp://www.elsevier.com/locate/apmhttp://www.sciencedirect.com/science/journal/0307904Xhttp://dx.doi.org/10.1016/j.apm.2014.07.001http://www.amc.edu.gr/mailto:[email protected]:[email protected]://dx.doi.org/10.1016/j.apm.2014.07.001http://-/?-http://crossmark.crossref.org/dialog/?doi=10.1016/j.apm.2014.07.001&domain=pdf
-
8/18/2019 advanes in Turbulent Modelling
2/40
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
694
2. Computer modelling of turbulence . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 695
2.1. The differential equations. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 695
2.2. Direct Numerical Simulation (DNS) . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 696
2.3. Reynolds-Averaged Navier Stokes (RANS) models . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 697
2.3.1. Physical concepts of turbulence. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 697
2.3.2. The equations . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 6982.3.3. Zero-equation
or algebraic models . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 699
2.3.4. Half-equation models. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 700
2.3.5. One-equation models . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 700
2.3.6. Two-equation models. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 701
2.3.6.1 The k–e model . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 7012.3.6.2 Modified k–e
model . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 7012.3.6.3 The k–x model. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 7022.3.6.4 More recent
two-equation models . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 702
2.3.6.5 Low Reynolds number modifications . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 704
2.3.7. Non-Linear Eddy Viscosity Models (NLEVM) . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 705
2.3.8. Recent advances in eddy viscosity modelling. . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 706
2.4. Differential Second-Moment (DSM) and Algebraic Stress
Models (ASM) . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 707
2.5. Two-fluid models of turbulence. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 709
2.6. Large Eddy Simulation (LES). . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 7102.6.1.
Validation of the LES approach . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 713
2.7. Monotone Integrated LES (MILES) and Implicit LES (ILES) . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 714
2.8. Unsteady Reynolds-Averaged Navier–Stokes (URANS) . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 714
2.9. Very LES (VLES) and Detached-Eddy Simulation (DES). . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 715
2.10. Hybrid RANS/LES strategies . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 715
3. Applications of DNS and LES to flows in pipes and flows with
a free surface . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 715
3.1. DNS of turbulent pipe flows. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 716
3.2. DNS of turbulent free-surface flows. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 719
3.3. LES of turbulent pipe flows . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 721
3.4. LES of turbulent free-surface flows . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 724
4. Conclusions. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
725
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 726
References . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
726
1. Introduction
Turbulence is the most complicated kind of fluid motion, making
even its precise definition difficult. Literature contains
many definitions as, for example, that included in Markatos [1]:
‘‘A fluid motion is described as turbulent if it is
three-dimen-
sional, rotational, intermittent, highly disordered, diffusive
and dissipative’’.
Turbulence is a three-dimensional, time-dependent, nonlinear
phenomenon. Its modelling is very attractive, as it saves
huge amounts of money, by avoiding the need to build and test
prototypes, and as it transforms technologies by allowing
improved understanding of turbulence. This is particularly true
in industrial flows which, apart from the complexities of
turbulence, involve also very complicated geometries and several
design parameters, requiring optimisation [2]. Thus,
shape design is one of the most important drivers for the use of
simulation approaches in fluid-engineering industry.
Examples refer to the drag of an aircraft or ship, propulsive
efficiency of aeroengines or propellers, turbomachinery, chem-
ical process engineering, among others. In comparison to
experiments, Computational Modelling offers a competitive
advantage if it is able to guide the analyst to a better
design.
Computer programs now exist which are capable of solving
three-dimensional, time-dependent Navier–Stokes (NS) equa-
tions, within practical computer resources. The reason that we
do not make direct computer simulations of turbulence is that
turbulence is dissipated, and momentum exchanged by small-scale
fluctuations [3]. The crucial difference between visuali-
sations of laminar and turbulent flows is the appearance of
eddying motions of a wide range of length scales in turbulent
flows [4,5].
A typical flow domain of 0.1 m by 0.1 m with a high Reynolds
number turbulent flow might contain eddies down to 10–
100lm size. We would need computing meshes of 109 up to 1012
points to be able to describe processes at all length scales.The
fastest events take place with a frequency of the order of 10 kHz,
so we would need to discretise time into steps of about
100ls. We have estimated that the direct simulation of a
turbulent channel flow at a Reynolds number of 800,000 requires
acomputer which is half a million times faster than a current
generation supercomputer. This estimate is analogous to the one
made by Speziale in 1991 [6], who stated that direct
simulation of a turbulent pipe flow at a Reynolds number
500,000
required a computer 10 million times faster than the CRAY
supercomputer of that time.
694 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
3/40
With present day computing power it has only recently started to
become possible to track the dynamics of eddies in
relatively simple flows at transitional Reynolds number. The
computing requirements for the direct solution of the time-
dependent Navier–Stokes equations for fully turbulent practical
flows at high Reynolds numbers are truly phenomenal
and must await major developments in computer hardware, possibly
those based on quantum computing.
Meanwhile, engineers need computational procedures which can
supply adequate information about the turbulent
processes, but which avoid the need to predict the effect of
each and every eddy in the flow [7]. Therefore, in
quantitative
work one is obliged to use turbulence models based on using
averaged NS equations and, in addition, a set of equations
that supposedly express the relations between terms appearing in
the NS equations [8–10]. It must be realised that most
of the available models pay no respect to the actual physical
modes of turbulence (eddies, velocity patterns, high-vorticity
regions, large structures that stretch and engulf...) and,
therefore, obscure the physical processes they purport to
represent.
Flow visualisation experiments [11–16] confirm
this point and demonstrate the difficulty of precise definition
and
modelling. It is therefore hardly surprising that the actual
physics of turbulence are nowhere to be seen in the available
models; simply because nobody can see as yet how mathematics can
be employed to represent them in the models. It is,
however, also true that the engineering community has
fortuitously often obtained very useful results by using
relatively
simple models, such as those described in Section
2.3 below, results that would have required much more
man-time and
experimental cost to obtain in their absence. Therefore,
cautiously exercised and interpreted the turbulence models can
be
valuable tools in research and design despite their physical
deficiencies.
The purpose of the present effort is to provide a comprehensive
review of the available turbulence modelling techniques.
The relevant material is certainly too much to be reviewed in a
single paper. For this reason the authors confine attention to
what they consider the better established or more promising
models. No disrespect is therefore implied for the models that
are scarcely – or not at all – mentioned. Extensive use has been
made of the published literature on the topic and of earlier
reviews [17–20,11,21–40].
In addition, ERCOFTAC (European Research Community On Flow,
Turbulence And Combustion) organises workshops and
special courses on best practise guidelines for CFD users. The
Special Interest Group (SIG) 15 of ERCOFTAC is devoted to tur-
bulence modelling, and provides the appropriate data (e.g.
experimental, DNS, highly-resolved LES databases) for the veri-
fication and validation of turbulence models, thus promoting
their use for fundamental research and for industrial
applications [41].
Turbulent heat and mass transport are not explicitly covered in
this review; the interested reader is directed to the review
by Launder [9]. Multi-phase phenomena are also not
explicitly covered, apart from presenting the general differential
equa-
tions and some necessary, to the authors’ mind, discussion on
considerable work done for free-surface flows.
The review concludes with a summary of the advantages and
disadvantages of the various turbulence models, in an
attempt to assist the potential user in choosing the most
suitable model for his particular problem.
In the remainder of this review paper:
Section 2 illustrates all of the available techniques for
predicting turbulent flows;
in Sections 3, a literature survey is presented for
applications using the LES and DNS technique; finally in
Section 4, conclu-sions and some recommendations for future
research are outlined.
2. Computer modelling of turbulence
2.1. The differential equations
The motion of a fluid in three dimensions is described by a
system of partial differential equations that represent math-
ematical statements of the conservation laws of physics (mass,
momentum, energy and concentration conservation). The
momentum conservation equations are called the Navier–Stokes
equations. In what follows the ‘‘Eulerian’’ equations gov-
erning the dynamics and heat/mass transfer of a turbulent fluid
are given, in Cartesian tensor notation, using the
repeated-suffix summation convention. The equations are
presented in the most general form of multi-phase flows
[42–54], as the single-phase ones are easily derived by just
setting the volume fraction, r i equal to
unity.
A convenient assumption for deriving these equations is based on
the concepts of time- and space-averaging; it is thatmore than one
phase can exist at the same location at the same time [46,54].
Then, any small volume of the domain of inter-
est can be imagined as containing, at any particular time, a
volume fraction r i of the ith phase. As a consequence,
if there are n
phases in total,
Xni¼1
r i ¼ 1: ð1Þ
When flow properties are to be computed over finite time
intervals, a suitable averaging over space and time must be
carried
out. Following the above notion, that treats each phase as a
continuum in the domain of interest, we can derive the
following
balance equations:
Conservation of phase mass:
@
@ t ðqir i
Þ þdiv
ðqir i
~V iÞ ¼
_mi;
ð2
Þ
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 695
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
4/40
where qi is the density, ~V i is the
velocity vector, r i is the volume fraction of phase
i; _mi is the mass per unit volume enteringthe
phase i, from all sources per unit time, and div
is the divergence operator (i.e. the limit of the outflow
divided by the
volume as the volume tends to zero).
Summation of (2) over all phases leads to the
‘‘over-all’’ mass-conservation equation:
Xni¼1
@
@ t ðqir iÞ þ divðqir i~V iÞ
¼ 0; ð3Þ
which has of course a zero on the right-hand side.Conservation
of phase momentum:
@
@ t ðqir iuikÞ þ divðqir i~V iuikÞ ¼
r ið~k grad p þ BikÞ þ F ik þ lik; ð4Þ
where: uik is the velocity component in the direction
k of phase i; p is pressure, assumed to be
shared between the phases;~k
is a unit vector in the k-direction; Bik is
the k-direction body force per unit volume of phase
i; F ik is the friction force exerted
on phase i by viscous action within that phase; and
l ik is the momentum transfer to phase i
from interactions with other
phases occupying the same space.
Conservation of phase energy:
@
@ t ðr iðqihi pÞÞ þ
divðqir i~V ihiÞ ¼ r iQ i þ H i
þ J i; ð5Þ
where: h i is stagnation enthalpy of phase i
per unit mass (i.e. the thermodynamic enthalpy plus the
kinetic energy of thephase plus any potential energy);
Q i is the heat transfer to phase i per unit volume;
H i is heat transfer within the same phase,
e.g. by thermal conduction and viscous action; and J i
is the effect of interactions with other phases.
Conservation of species-in-phase mass:
@
@ t ðqir imilÞ þ divðqir i~V imilÞ ¼
divðr iCil grad milÞ þ r iRil þ _miM il;
ð6Þ
where: mil is the mass fraction of chemical species
l present in phase i; Ril is the rate
of production of species l, by chemical
reaction, per unit volume of phase i present;
Cil is the exchange coefficient of species l
(diffusion); and M il is the l-fraction
of
the mass crossing the phase boundary, i.e. it represents the
effect of interactions with other phases.
All of the above equations can be expressed in a single form as
follows:
@
@ t ðqir iuiÞ þ divðqir i~V iuiÞ ¼
divðr iCui grad uiÞ þ _miUi þ
r isui total source of ui; ð7Þ
where: ui is any extensive fluid property; the first term
on the right-hand side expresses the whole of that part of the
sourceterm which can be so expressed, with Cui being the
exchange coefficient for ui. sui is the source/sink
term for ui, per unitphase volume; and _miUi
represents the contribution to the total source of any
interactions between the phases, such as any
phase change (withUi being the value
of ui in the material crossing the phase boundary,
during phase change). Distributionof effects between _miUi
and sui is sometimes arbitrary, reflecting
modelling convenience. For single-phase situations, the
above equations are valid by setting the r’s to
unity.
For turbulent flow, averaging over times which are large
compared with the fluctuation time leads to similar equations
for time-average values of ui with
fluctuating-velocity effects usually represented by enlargement
of Cui. More details on theabove concepts and equations may be
found in [1].
2.2. Direct Numerical Simulation (DNS)
Solutions of turbulent flow problems (Eqs. (1)–(4)) can be
obtained by using various analytical or numerical approaches,
with different level of accuracy in each case. Among the latter
approaches, the Direct Numerical Simulation (DNS) has made a
significant contribution in turbulence research over the last
decades [21], as it involves the numerical solution of the
above
full three-dimensional, time-dependent Navier–Stokes equations
without the need of any turbulence model. DNS is indeed
useful for the investigation of turbulence mechanisms, the
improvement and development of turbulence models and for
assessing two-point closure theories.
Until the 1970’s the DNS approach was impossible to be used due
to computer systems with insufficient memory and
speed to accommodate the required resolution needed for the
small-scale turbulence effects. The first attempts for the
inves-
tigation of homogeneous turbulence with DNS originated at the
National Center for Atmospheric Research (NCAR) by Lilly
[55] and Orszag and Patterson [56] for 2-D and
3-D dimensional simulations, respectively. Rogallo
[57] investigated the
effects of mean shear, rotational and irrotational strain on
turbulence, based on the extension of Orszag and Patterson
algo-
rithm. Kim et al. [58], Moser et al. [59], Abe et
al. [60], Del Alamo et al. [61] and Hoyas and
Jimenez [62], among others, per-
formed DNS for the investigation of wall turbulence for channel
flows at1 Res = 180, 395, 640, 1900 and 2003.
1 Reynolds number based on the friction velocity us and
the channel half width.
696 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
5/40
There have also been extensive investigations of DNS in
turbulent boundary layers at2 Reh = 700 [63],
1410 [64], 2500 [65],
2900 [66], 4060 [67] and
6650 [68,69]. More complex problems in wall-bounded
turbulent flows (e.g. square duct, homoge-
neous isotropic turbulence, heat transfer, turbulence control
and wavy boundary) have also been studied by DNS. The
interested
reader may also consider the review papers by Moin and
Mahesh [21], Kasagi and Shikazono [20] and Ishihara
et al. [23]. The
most recent review concerning almost all the aspects of DNS
(e.g. wall-bounded turbulence, turbulence control, bluff body
tur-
bulence, turbulent flow structures and high performance
computing) may be found in the work of Alfonsi [70].
The current largest scientific DNS was performed by Lee et
al. [71] for turbulent channel flow at Res =
5200 and 3.5 times
more degrees of freedom than the DNS (40963 grid points)
obtained by Kaneda et al. [72] and Kaneda and
Ishihara [73] on
the Earth Simulator in Japan. The maximum Reynolds number
obtained was approximately 1200 (Taylor microscale) which
is similar to the current capabilities obtained by laboratory
experiments.
The absence of a turbulence model implies that the simulation is
obtained by numerically solving over all the spatial and
temporal scales of turbulence, and its accuracy, therefore, is
unrivalled by other methods. However, the DNS of high-Rey-
nolds number flows poses overwhelming demands on present-day
available computing resources (speed and storage). It
is, therefore, necessary that DNS satisfies the following two
constraints, according to Rogallo and Moin [17] and
Kasagi
and Shikazono [20]:
(1) The dimensions of the computational domain must be large
enough to comprise the largest turbulence scales.
(2) Grid resolution must be fine enough to capture the
dissipation length scale, which is known as the Kolmogorov
micro-
scale, g = (v3/e)1/4, where e is the
average rate of dissipation of turbulence kinetic energy per unit
mass, and v is thekinematic viscosity of the fluid.
As a result, the required number of grid points for a given DNS
is dependent on the Kolmogorov micro-scale and Kolmogo-
rov micro-timescale (s = (v/e)1/2) of the flow. The higher
the Reynolds number, the finer the mesh should be. Hence, thecell
size in each direction of the computational domain should decrease
with Re3/4 and the time step should decrease withRe1/2
[74,3]. It is worth mentioning that the DNS time step is
always smaller than the Kolmogorov micro-timescale in orderto
maintain the algorithm’s numerical stability [75].
The required resolution for DNS in the directions parallel to
the wall, according to the work of Kim et al. [58], isD x+ = 8
and
D z + = 4, where D x+ is the streamwise and
D z + is the spanwise grid spacing, respectively. In
wall-normal directions, a rule of
thumb is to place at least three grid points below y+ = 1
(non-dimensional distance from the wall to the first grid point)
and at
least 10 grid points for y+ < 10, while in the outer
region such as the pipe/channel centre line a value
of D y+ = 10 must beused.
Even with modern super-computers, the applicability of DNS is
limited to flows of low to moderate Reynolds numbers.
Despite this current limitation, DNS is an effective and very
useful tool for turbulence research leading to satisfactory
results,
and used for testing simpler turbulence models, but it is still
not practical for industrial or general engineering
applications.
Among other benefits, DNS has contributed remarkably to testing
conventional models and ideas and therefore to the devel-
opment of turbulence theory, in many ways which are summarized
briefly below [20,74]. Furthermore, DNS data are impor-
tant for the development and improvement of turbulence models,
due to the ability of DNS to provide the appropriate
turbulence statistics, including pressure and all spatial
derivatives.
Important dimensionless numbers such as Reynolds and Prandtl can
be varied in DNS, a fact of significant importance for
the derivation of a turbulence model with wide applicability.
DNS is also suitable for studying a virtual flow which may
occur
in reality now or in the near future. The latter advantage is
important for the study of a dynamical turbulence phenomenon
[76] and for the evaluation of turbulence control
methodologies [77].
Another important issue about DNS is the validation of the
obtained results. According to Sandham [75] and Coleman and
Sandberg [78] the following are the criteria for
such a validation: (a) validation of the obtained numerical data
against
analytical solutions, experimental data and different numerical
codes; (b) parametric studies with different grid resolutions,
domain sizes and time steps; (c) the time step (Dt ) should
be comparable with the Kolmogorov time-scale and the grid
spacing, D xi, with Kolmogorov micro-scale, while the
ratios of Dt /s and D xi/s
should be of order unity; (d) evaluation of the
statistical quantities budgets.
2.3. Reynolds-Averaged Navier Stokes (RANS) models
For the purpose of introducing the concepts of turbulent flow
modelling we restrict attention to single-phase, incom-
pressible flow with constant laminar viscosity. The introduction
of two-phase considerations, variable density and viscosity
are nowadays relatively easy tasks in modern solution
algorithms. Only a generic presentation of turbulence modelling
is
attempted here, for the sake of clarity. Details on the manner
in which turbulence models properly couple into multi-phase
flow solvers may be found in literature (for
example [79,80]).
2.3.1. Physical concepts of turbulence
Before discussing the turbulence models a very brief description
of some concepts is provided. The main characteristic of
turbulence is the transfer of energy to smaller spatial scales
across a continuous wave-number spectrum, i.e. a 3D, nonlinear
2 Reynolds number based on momentum thickness h and
free-stream velocity.
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 697
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
6/40
process. A useful concept for discussing the main mechanisms of
turbulence is that of an ‘eddy’ [81,82,3]. An eddy can be
thought of as a typical turbulence pattern, covering a range of
wave- lengths, large and small eddies co-existing in the same
volume of fluid. The actual modes of turbulence are eddies and
high-vorticity regions [4,3]. By analogy with molecular
vis-
cosity, which is a property of the fluid, turbulence is often
described by eddy viscosity as a local property of the fluid;
the
corresponding mixing length in eddy viscosity models is treated
in an analogous manner to the molecular mean-free path
derived from the kinetic theory of gases. This description is
based on erroneous physical concepts but has proved useful in
the quantitative prediction of simple turbulent flows
[7].
The eddies can be considered as a tangle of vortex elements (or
lines) that are stretched in a preferred direction by mean
flow and in a random direction by one another. This mechanism,
the so-called ‘vortex stretching’, ultimately leads to the
breaking down of large eddies into smaller ones. This process
takes the form of an ‘energy cascade’. Since eddies of compa-
rable size can only exchange energy with one another [9],
the kinetic energy from the mean motion is extracted from the
largest eddies [3]. This energy is then transferred to
neighbouring eddies of smaller scales continuing to smaller and
smaller
scales (larger and larger velocity gradients), the smallest
scale being reached when the eddies lose energy by the direct
action
of viscous stresses which finally convert it into internal
thermal energy on the smallest-sized eddies [82]. It is
important to
note that viscosity does not play any role in the stretching
process nor does it determine the amount of dissipated energy;
it
only determines the smallest scale at which dissipation takes
place. It is the large eddies (comparable with the linear
dimen-
sions of the flow domain), characterising the large-scale
motion, that determine the rate at which the mean-flow kinetic
energy is fed into turbulent motion, and can be passed on to
smaller scales and be finally dissipated. The larger eddies
are thus mainly responsible for the transport of momentum and
heat, and hence need to be properly simulated in a turbu-
lence model. Because of direct interaction with the mean flow,
the large-scale motion depends strongly on the boundary
conditions of the problem under consideration.
An increase in Reynolds number increases the width of the
spectrum, i.e. the difference between the largest eddies (asso-
ciated with low-frequency fluctuations) and the smallest eddies
(associated with high-frequency fluctuations). This suggests
that at high Reynolds numbers the turbulent motion can be well
approximated by a three-level procedure, namely, a mean
motion, a large-scale motion and a small-scale motion
[83].
Viscosity does not usually affect the larger-scale eddies which
are primarily responsible for turbulent mixing, with the
exception of the ‘viscous sublayer’ very close to a solid
surface. Furthermore, the effects of density fluctuations on
turbulence
are small if, as in the majority of practical situations, the
density fluctuations are small compared to the mean density,
the
exception being the effect of temporal fluctuations and spatial
gradients of density in a gravitational field. Therefore, one
can
usually neglect the direct effect of viscosity and
compressibility on turbulence. It is also important to note that it
is the fluc-
tuating velocity field that drives the fluctuating scalar field,
the effect of the latter on the former usually being
negligible.
2.3.2. The equations
Eqs. (8)–(11) below constitute the mathematical
representation of fluid flows, under the assumptions that the
turbulentfluid is a continuum, Newtonian in nature and that the
flow can be described by the Navier–Stokes equations. For
turbulent
flows, the latter represent the instantaneous values of the flow
properties [1,84,85].
The equations for turbulence fluctuations are obtained by
Reynolds de-composition which describes the turbulent motion
as a random variation about a mean value [1]:
/ ¼ /þ /0; ð8Þwhere / is the instantaneous scalar
quantity, / its time- mean value and /
0the fluctuating part. The time-average of the fluc-
tuating value is zero /0 ¼ 0, and the mean value
/ is defined as:
/ð xÞ ¼ limt !1 1Dt
Z t 1þDt t 1
/ð x; t Þdt t 1 Dt t 2;
ð9Þ
where t 1 is the time scale of the rapid
fluctuations and t 2 the time scale of the slow motion
(for time-dependent mean value,
i.e. for non-stationary turbulence). By substituting Eq. (8)
into the form of Eqs. (1)–(3) for single-phase, incompressible
flowsand then taking the time-mean of the resulting equations, one
derives the following continuity and NS equations:
@ ui@ x ¼ 0; ð10Þ
@ ui@ t þ @
@ x jðuiu jÞ ¼ 1q
@ p
@ xiþ m @
2ui@ x j@ x j
@ @ x j
ðu0iu0 jÞ; ð11Þ
where ui is the mean velocity, u0i the
fluctuating velocity, q the fluid density and v the
kinematic viscosity. Eq. (11) is known
as the Reynolds-Averaged Navier–Stokes (RANS) equation, while
the term u0iu0
j is the Reynolds-stress tensor:
sij ¼ u0iu0 j; ð12Þ
which is a symmetric tensor with six independent components. It
is observed from Eqs. (10) and (11) that the number
of
unknown quantities (pressure, three velocity components and six
stresses) is larger than the number of the available
698 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
7/40
equations (continuity and Navier–Stokes). As a result, the
system of equations is not yet closed and the problem of
‘‘closure’’
is reduced to the modelling of the Reynolds-stresses, in terms
of mean-flow quantities.
The most popular approach to resolving this problem of
‘‘closure’’ is the use of the Boussinesq eddy-viscosity
approxima-
tion [86]. The latter is based on an analogy between molecular
and turbulent motions, in order to correlate Reynolds stresses
to the rate of strain of the mean motion. The turbulence eddies
are thought of as parcels of fluid, which like molecules,
collide
and exchange momentum, obeying the kinetic theory of gases.
Thus, in analogy with the molecular viscous stress, the Rey-
nolds (turbulence) stresses are modelled as
follows [1]:
sij ¼ u0iu0 j ¼ 23jdij
mt @ ui@ x j
þ @ u j@ xi
; ð13Þ
k ¼ 12
u0iu0
i ¼ 1
2 u021 þ u022 þ u023
; ð14Þwhere k is the turbulence kinetic energy
and mt ð¼ lt =qÞ is the turbulence or eddy
(kinematic) viscosity which, in contrast tothe molecular
(kinematic) viscosity is not constant; and may vary significantly
from flow to flow and from point to point [1];
and dij is the Kronecker delta. Substituting Eq.
(13) into Eq. (11) leads to:
@ ui@ t þ @
@ x jðuiu jÞ ¼ 1q
@ p
@ xiþ @
@ x jðmþ mt Þ @
ui@ x j
: ð15Þ
The isotropic part of the Reynolds-stress tensor is absorbed
normally into the pressure term as
p ¼ p þ 2k3
.
Dimensional analysis dictates that the unknown vt must be
proportional to the product of a characteristic
velocity V t and
a characteristic length scale Lt . The difference
between zero-equation, one-equation and two-equation models,
discussedbelow, lies in the way they choose to calculate
them [1]. Thus, zero-equation models prescribe both
characteristic velocity
and length-scale as algebraic expressions. One-equation models
consider as characteristic velocity the square root of the tur-
bulence kinetic energy and prescribe algebraically the length
scale, therefore:
vt ¼ C v 1 ffiffiffi
kp
L; ð16Þwhere C v 1 is a
dimensionless constant. Two-equation models, such as k–e
and k–x [1], described below in this subsection,use
differential equations to compute both the characteristic velocity
and length scale and then estimate the value of vt by
the following equations:
vt ¼ C l f l
k2
e ðk—e modelsÞa kx
ðk—x modelsÞ
( ; ð17Þ
where f l is a damping function,
C l and a are constants, e is the
turbulence energy dissipation rate and x the dissipation
perunit turbulence kinetic energy.
Recent developments have led to the construction of non-linear
eddy viscosity models, aiming at including non-linear
terms of the strain-rate [40]. More details for these
models are presented in Section 2.3.7.
The traditional linear-eddy-viscosity RANS models may be divided
into the following four main categories [1,87]: (a) alge-
braic (zero-equation) models, (b) half equation models (c)
one-equation models and (d) two-equation models.
In the remainder of this section, a number of the
better-established and most promising, according to the present
authors’
experience, linear and non-linear eddy viscosity models, along
with some more recently advanced ones, will be presented and
discussed.
2.3.3. Zero-equation or algebraic models
Zero-equation or algebraic models use partial differential
equations only for computing the mean fields, while only alge-
braic expressions for the turbulence quantities [1]. This
class of models is the oldest one, it is characterised by
simplicity to
implement and has given good results for some applications of
engineering relevance. For example, the best known of this
class, Prandtl’s mixing length model [88], is suitable for the
prediction of thin-shear-layer flows such as boundary layers,
jets,
mixing layers, and wakes. According to Prandtl, [88], in a
boundary layer flow the eddy viscosity is given by:
vt ¼ ‘2mix@ u
@ y
; ð18Þ
where ‘mix is the mixing length, that depends upon
the type of flow, and is specified algebraically, while y
is the direction
normal to the wall. This model is not suitable for predicting
flows with recirculation and separation.
More modern variants of this category, following the
contribution of Van Driest, Clauser and Klebanoff modifications
[86],
are the Cebeci–Smith [89] and Baldwin–Lomax models
[90]. These models are characterised by two-layer
mixing-length
eddy viscosities, one as an inner and one as an outer layer
viscosity. The second model is distinguished from the first
because
of the different outer-layer length viscosity equation. Both are
suitable for predicting turbulent flows in aerodynamics (e.g.
around airfoils) with similar accuracy, but are unreliable for
separated flows. The mathematical formulations of these models
may be found in the textbook by Wilcox [86]. Nowadays,
zero-equation models are used rarely and only for getting an
initial
prediction of the flow field [91].
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 699
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
8/40
2.3.4. Half-equation models
In 1985 Johnson and King [92] developed a two layer
model for the investigation of pressure driven separated flows.
The
J–K model has been improved by Johnson [93] and
Johnson and Coakley [94] in order to become applicable to
compressible
flows as well. In addition, the J–K model has been extended for
3-D dimensional flows by Savill et al. [95]. The
mathematical
equations along with comparisons against computational and
experimental data may be found in Wilcox [86]. Even though
the J–K model has improved the classical algebraic models for
predicting turbulent, transonic separate flows, it still
suffers
from the same drawbacks as the Cebeci–Smith and Baldwin–Lomax
models.
2.3.5. One-equation models
One-equation models are characterised by formulating one
additional transport equation for the computation of a turbu-
lence quantity, usually the turbulence kinetic energy (k). For
all of them there is still a need of prescribing a length-scale
distribution (L), which is defined algebraically and is usually
based on available experimental data. For elliptic flows, like
recirculating and separated ones, experimental data is generally
not available, making it difficult to prescribe algebraically
such a length scale. Therefore, most researchers decided to
adopt two- or even more-equation models [1]. One-equation
models were used mainly in the nuclear and aeronautics
industries (e.g. aircraft wings, fuselage, nuclear reactors) and
the
most well known for aerospace applications are Baldwin and
Barth [96] and Spalart and Allmaras
[97] models. The Spal-
art–Allmaras was designed and optimised for flows past wings and
airfoils and produced very good results. It is also easy
to implement for any type of grid (e.g. structured or
unstructured, single-block or multi-block) [40]. However, both
models
create enormous diffusion, in particular for regions of 3-D
vortical flow [40]. Improvements of the aforementioned
models
are presented in the works of Spalart and
Shur [98], Dacles-Mariani et al. [99] and
Rahman et al. [100], regarding the effects
of curvature, rotation, decrease of diffusion and for near-wall
effects. Recent studies with the Spalart–Allmaras model havebeen
presented by Karabelas and Markatos [101] and
Karabelas [102] for flow over an airfoil and past a
flapping multi-ele-
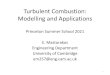
ment airfoil, respectively. Karabelas [102]
performed simulations past a plunging multi-element airfoil at
Re = 6 105(Fig. 1).
Accurate resolution of such flows still constitutes a great
mathematical challenge for RANS modelling. It is well known
that the latter is often inaccurate even in terms of integrated
quantities, such as lift and drag coefficients. This is due to
Fig. 1. Turbulence simulations of the flow past a
plunging multi-element airfoil at Re = 6 105: Path-lines and
pressure distribution at three fixed
geometric angles of attack, soaring flight regime (left),
mid-time of the up-stroke (middle) and mid-time of the down-stroke
phase (right), reproduced withthe author’s permission [102].
Reprinted by permission of the American Institute of Aeronautics
and Astronautics, Inc.
700 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
9/40
the fact that in flow regimes past multi-element airfoils,
multiple transition processes from laminar to turbulent states
and
vice versa could occur. In this study, we mention the
one-equation model of Spalart Allmaras because its performance
was
found to be superior [103] even over other more
complete two-equation models. Further tuning of the latter models
to
include transition effects did not increase considerably the
accuracy of the simulations. It is worth mentioning, that in
the workshop held by NASA [104], for validating
turbulence modelling of the flow past the multi-element airfoil
MDA
30P-30N, mainly one-equation models were used in the governing
equations.
Recently, Fares and Schroder [105] developed a
complete and general one-equation model based on the
two-equation k–
x model for predicting general turbulent flows such as
wakes, jets, boundary layers and vortex flows. The new model
provedmore accurate compared to the Spalart–Allmaras model,
especially for jets and vortex flows. More information for
zero-,
half- and one-equation models is provided in detail in the
review papers by Markatos [1], Alfonsi [106] and in
the classic
text by Wilcox [86].
2.3.6. Two-equation models
Two-equation models use, in addition to the mean-flow
Navier–Stokes equations, two transport equations for two turbu-
lence properties. The first one is usually that for the
turbulence kinetic energy (k) and the second any other from a
variety
that includes: the dissipation rate of turbulence kinetic energy
(e), the specific dissipation rate (x), the length scale (l),
theproduct of k l, the time scale s, the product
of k ands, among others [1]. This class of models is the most
preferred by indus-try it looks like remaining so for the
foreseeable future [85]. Two-equation eddy viscosity models
are still the first choice for
general CFD calculations, with the
standard k–e model [107] and k–x [108] being
the most widely used. There is no partic-ular reason for this
preference, but at least those models have been applied so widely,
that we know their behaviour
beforehand.
In this section only the k–e and k–x
models are presented, as being representative of the
two-equation models, alongwith their improvements and some
interesting low-Re versions.
2.3.6.1. The k–e modelThe k–e model is by
far the most widely used and tested two-equation model, with many
improvements incorporated
over the years. The standard k–e model of Launder and
Sharma [107] is specified as follows:Kinematic eddy
viscosity (vt) equation:
mt ¼ C l k2
e : ð19Þ
Turbulence kinetic energy (k) equation:
@ k
@ t þu j
@ k
@ x j ¼
@
@ x j
ðmþ vtÞ
rk
@ k
@ x j eþ sij@ ui
@ x j
:
ð20
ÞTurbulence dissipation rate (e) equation:
@ e@ t þ u j @ e
@ x j¼ @
@ x j
ðm þ vtÞre
@ e@ x j
þ C e1 e
ksij
@ ui@ x j
C e2 e2
k ; ð21Þ
where rk = 1.0 and re = 1.3 are the Prandtl
numbers for k and e, respectively. The remaining
model constants are: C l = 0.09,C e1 =
1.44, C e2 = 1.92. The standard k-e model
behaves very in predicting turbulent shear flows, in many
applications of engi-neering interest. However, this model is
unable to predict accurately flows with adverse pressure gradients
and extra strains
(e.g. streamline curvature, skewing, rotation [91]). As a
result it yields poor results for separated flows, whilst it is
rather
difficult to be integrated through the viscous sublayer [86].
Despite the above shortcomings, the k–e model is
recommendedfor an at least gross estimation of the flow field and
for cases such as combustion, multiphase flows and flows with
chemical
reactions [91].
2.3.6.2. Modified k–e modelImprovements and
modifications of the standard k–e model are many (for
example, for flows with strong buoyancy, [1])
with probably the most important being the realisable k–e
model [109] and the Renormalization Group (RNG)
k–e model[110].
The first model is based on the satisfaction of the
realizability constraints on the normal Reynolds stresses and
the
Schwartz inequality for turbulent shear stresses. Beside this,
the C l constant of standard k–e
model is not anymore aconstant but it is computed in this improved
model by an eddy-viscosity equation. Performance is substantially
improved
for jets and mixing layers, channels, boundary layers and
separated flows compared to the standard k-e
model [109]. Theconstants of the realisable k-e
model are: C e1 = 1.44, C e2 =
1.9, rk = 1.0 and re = 1.2.
The RNG k–e model [110] is a modification of the classical
k–e model with better predictions of the recirculation length
inseparating flows. The model is represented by the same equations
(19)–(21) of standard k–e model but with a modified
coef-ficient, C e2, which is computed by the following
equation:
C e2 C e2 þC lg3
ð1
g=g0
Þ1 þ b1g3 ; ð22Þ
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 701
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
10/40
g ¼ Ske ; S ¼
ffiffiffiffiffiffiffiffiffiffiffiffi2S ijS ij
q ; S ¼ 1
2
@ ui@ x j
þ @ u j@ xi
; ð23Þ
where S denotes the mean strain-rate of the
flow and S ij the deformation tensor. The model
constants are: C l = 0.085,
C e1 = 1.42, C e2 =
1.68, rk = re = 0.72, b = 0.012
and g0 = 4.38. This model gives better results than the
standard k–e modelfor separating flows, but fails to
predict flows with acceleration [91].
Implementation of standard k–e model and
RNG k–e model for pollutant dispersion from large
tank-fires [111–114] andstreet canyon flows [115],
respectively, have been recently undertaken by the authors. In
addition, high Reynolds number
turbulent flow past a rotating cylinder has also been examined
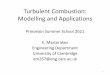
by the authors and their colleagues. In Fig. 2,
supercriticalstreamline patterns are illustrated compared with
laminar ones at Re = 200 and for some common examined
cases (same
rotational rate) for flow past a rotating cylinder. More details
for the study can be found in the work of Karabelas et
al. [116].
2.3.6.3. The k–x modelAnother ‘successful’ model and
also widely used is the k–x model. The initial form of
the model was proposed by
Kolmogorov in 1942 [117]. An improved version of the model
was developed by the Imperial College group under Prof. B.
Spalding [118]. Further development and application
of k–x model was performed by many scientists and
engineers, butthe most important development was by Wilcox
[108]. In the present paper, the most recent version of the
model (Wilcox
(2006) k–x model) is presented
below [86,108]:Kinematic eddy viscosity (vt) equation:
mt ¼
k
~x; ~x
¼max x;C
lim
ffiffiffiffiffiffiffiffiffiffiffiffi2S ijS ijbs (
); C lim ¼7
8:
ð24Þ
Turbulence kinetic energy (k) equation:
@ k
@ t þ u j @ k
@ x j¼ @
@ x jv þ r k
x
@ k
@ x j
bkxþ sij @
ui@ x j
: ð25Þ
Specific dissipation rate (x) equation:
@ x@ t þ u j @ x
@ x j¼ @
@ x jv þ r k
x
@ x@ x j
bx2 þ rd
x@ k
@ x j
@ x@ x j
þ axk sij
@ ui@ x j
: ð26Þ
The auxiliary relations and closure coefficients of the model
are specified as follows:
a ¼ 0:52; b ¼ b0 f b; b0 ¼ 0:0708;
b ¼ 0:09; r ¼ 0:5; r ¼ 0:6;
rd0 ¼ 0:125; ð27Þ
rd ¼0; @ k
@ x j
@ x@ x j6 0
rd0;
@ k@ x j@ x@ x j
> 0
8><>: ; f b ¼ 1 þ 85vx1 þ 100vx
; vx XijX jk
S ki
ðbxÞ3
; Xij ¼ 12 @ ui@ x j
@ u j@ xi
; ð28Þ
where C lim is the stress-limiter
strength, f b the vortex-stretching function,
vx the dimensionless vortex-stretching
parameterandXij the mean-rotation tensor.
The k–x model is superior to the standard k–e
model for several reasons. For instance, itachieves higher
accuracy for boundary layers with adverse pressure gradient and can
be easily integrated into the viscous
sub-layer without any additional damping functions [86]. In
addition, the recent version of Wilcox (2006) k–x model
ismuch more accurate for free shear flows and separated flows. The
model still suffers from weaknesses when applied to flows
with free-stream boundaries (e.g. jets), according to the review
paper by Menter [119].
2.3.6.4. More recent two-equation models
A more advanced turbulence model is the Shear Stress Transport
(SST) model by Menter [120]. This model combines
theadvantages of k–e and k–x models in
predicting aerodynamic flows, and in particular in predicting
boundary layers understrong adverse pressure gradients. The model
has been validated against many other applications with good
results such as
turbomachinery blades, wind turbines, free shear layers, zero
pressure gradient and adverse pressure gradient boundary
layers. Recent improvements of the model are an enhanced version
for rotation and streamline curvature [121] and the
replacement of the vorticity in the eddy viscosity with the
strain rate [119]. The mathematical formulation of the
model
is not repeated due to space limitations, but it may be found in
the above mentioned references.
Another class of two-equation models is the two-time scale
models, with significantly improved results compared to the
k–e model. Hanjalic et al. [122] proposed a
multi-scale model in which separate transport equations are solved
for theturbulence energy transfer rate across the spectrum. The
mathematical formulation of the proposed turbulence model is
as follows [123].
vt
¼ C l
kkP
eP ; ð29Þ
702 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
11/40
Fig. 2. Streamline patterns at Re = 200, 5 105
, 106
, 5 106
and rotational rates a = 2, 3, 4, 5, 6, 7 and 8. L1
and L2 stagnation points are apparent for lowrotational rates
(laminar flow), while A, B, C and Z are addressed for the
super-critical Reynolds numbers [116].
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 703
-
8/18/2019 advanes in Turbulent Modelling
12/40
DkP Dt ¼ @
@ x jðmþ vtÞ @ kP
@ x j
þ P k eP ; ð30Þ
DkT Dt ¼ @
@ x jðv þ vtÞ @ kT
@ x j
þ eP eT ; ð31Þ
DeP
Dt ¼ @
@ x j ðv
þvtÞ@ eP
@ x j þ C P 1eP
kP P k
C P 2e2P
kP þC 0P 1kP
@ ul
@ xm
@ ui
@ x jelmkeijk;
ð32
ÞDeT Dt ¼ @
@ x jðv þ vtÞ @ eT
@ x j
þ C T 1 eP eT
kT C T 2 e
T 2
kT : ð33Þ
The form of Eq. (29) has been obtained from
simplifying the mean-Reynolds-stress (MRS) equation by considering
normal
Reynolds stresses proportional to k and by taking
the time scale for pressure strain to be kP eP .
The above mentioned Eqs.
(29)–(33) use the following set of coefficients and
functions:
C l ¼ 0:09; C P 1 ¼ 2:2;
C 0P 1 ¼ 0:11; C P 2 ¼ 1:8
0:3kP kT 1
kP kT þ 1 ; C T 1 ¼ 1:08
eP eT
; C T 2 ¼ 1:15; ð34Þ
where P k ¼ uiu j
@ ui@ x j .
Here k p and kI are, respectively,
the turbulence kinetic energy in the production and dissipation
ranges,P
k is the rate at which turbulence energy is produced (or
extracted) from the mean motion, e
p is the rate at which energy is
transferred out of the production range, eT is
the rate at which energy is transferred into the dissipation range
from the iner-tia range and e is the rate at which
turbulence energy is dissipated (i.e. converted into internal
energy).
It is worth mentioning that the proposed version
of k–e model performs better than the standard
(single-scale) k–e modeldue to the fact that
e p (rate at which energy is transferred out of the
production range) replaces P k (turbulence production)
inthe dissipation rate (e) equation, simply because in flows where
P k is suddenly switched off, e is not
expected to decreaseimmediately. The present model gives better
predictions than the single-scale k–e model in plane
and round jets [1].
The main advantage of the two-scale k–e model is the
combination of modelling the cascade process of turbulence
kineticenergy and of solving complex flows such as separating and
reattaching flows. Improvements of the model may be achieved
by accounting for the proper empirical coefficients which affect
the spectrum shape. Applications of the model for breaking
waves [124], plane synthetic and swirling jet [125],
wake-boundary-layer interaction and compressible flow [126],
may be
found in the literature. Finally, new models for non-equilibrium
flows have also been developed by Klein et al.
[127] with
satisfactory results.
2.3.6.5. Low Reynolds number modifications
Most of the above models are applicable for turbulent flows at
high- Re numbers, but are inaccurate for the prediction
of
the flow in the vicinity of the wall, where viscous forces
dominate. In order to treat this shortcoming, many scientists
and
engineers have proposed a number of near-wall modifications.
These models with near-wall modifications are referred to as
‘‘Low-Reynolds Number’’ (LRN) models. A full list of these
models is presented in the text by Wilcox [86] and in
the review
paper by Patel et al. [128]. In the present paper two
popular LRN models will be presented, the Lam–Bremhorst
k–e model[129] and Bredberg et
al. k–x model [130]. The mathematical formulation of
the first model can be written in the followingboundary layer
form:
u@ k
@ xþ t @ k
@ y¼ @
@ y v þ vt
rk
@ k
@ y
þ vt @ u
@ y
2 e; ð35Þ
u@ ~e@ x þ t
@ ~e@ y ¼
@
@ y v þ vtrk
@ ~e@ y
þ C e1 f 1 ~ek vt @ u@ y 2
C e2 f 2~e2
k þ E ; ð36Þ
where the turbulence dissipation (e) is given by the following
equation:
e ¼ e0 þ ~e ð37Þand e0 is the value
of e at y = 0. The kinematic eddy
viscosity is defined as:
vt ¼ C l f lk
2
~e : ð38Þ
The damping
functions ð f 1; f 2; f l; e0
and E Þ and closure coefficients for the
Lam–Bremhorst k–e model are presented below:
f l ¼ ð1 expð0:0165R yÞÞ2 1 þ20:5
Ret
; f 1 ¼ 1 þ
0:05
f l
!3; f 2 ¼ 1 expðRe2t Þ;
Ret ¼
k2
~ev; R y ¼ k
0:5 y
v ;
e0 ¼ 0; E ¼ 0; C e1 ¼ 1:44;
C e2 ¼ 1:92; C l ¼ 0:09;
rk ¼ 1:0; re ¼ 1:3: ð39Þ
704 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
13/40
The development of LRN k–e models improved the
original k–e model by making it more compatible with the
law of thewall. However, LRN modifications did not improve the
problem with strong adverse pressure gradient. More details for
the
difficulty of LRN k–e models to predict turbulent
flows with pressure gradients may be found in Wilcox [86].
Finally, Patelet al. [128] claim that any improvement in
predicting flows with adverse pressure gradient would require
modifications to
the original k–e model itself.Another class of LRN
models is the k–x models and one of the most popular is
the standard k–x model by Wilcox [108].
Extensions and improvements of the model have been proposed by
Wilcox [131], Peng et al. [132], Bredberg et al.
[130],
among others.
The mathematical equations of Bredberg et al. k–x
model are as follows:
@ k
@ t þ @
@ x jðu jkÞ ¼ @
@ x jv þ v t
rk
@ k
@ x j
þ P k C kkx; ð40Þ
@ x@ t þ @
@ x jðu jxÞ ¼ @
@ x jv þ vt
rx
@ x@ x j
þ C x v
kþ vt
k
@ k@ x j
@ x@ x j
þ C x1 xk
P k C x2x2: ð41Þ
The turbulence kinematic viscosity is defined as:
vt ¼ C l f lk
x; ð42Þ
where the damp function f l is given by the
following equation:
f l ¼ 0:09 þ 0:91 þ 1
Re3t
! 1 exp Ret
25
2:75( )" #: ð43Þ
Finally, the constants of the model are denoted as:
C l ¼ 1; C k ¼ 0:09;
C x ¼ 1:1; C x1 ¼ 0:49;
C x2 ¼ 0:071; rk ¼ 1; rx ¼ 1:8:
ð44ÞThe model of Bredberg et al. [130] presents
improved results against the original Wilcox k–x model,
compared to DNS
and experimental data for three different cases (channel flow,
backward facing step flow and rib-roughened channel flow).
Recently, an extension of the model to viscoelastic fluids was
proposed by Resende et al. [133].
2.3.7. Non-Linear Eddy Viscosity Models (NLEVM)
As mentioned earlier in Section 2.3.2, the Non-Linear Eddy
Viscosity Models (NLEVM), may be defined as non-linear
extensions of the eddy-viscosity models in which Eqs. (13)
and (15) can be rewritten in a more general form, in order
to
include non-linear terms of the strain-rate [40]:
sij ¼ u0iu0 j ¼2
3jdij þ
XN nþ1
anT ðnÞij ; ð45Þ
@ ui@ t þ @
@ x jðuiu jÞ ¼ 1q
@ p
@ xiþ @
@ x jðmþ mt Þ @
ui@ x j
þ N :S :T :; ð46Þ
where N.S.T are non-linear source terms deriving from Eq.
(45).
This class of models has been developed to overcoming the
deficiencies of eddy-viscosity models, in particular for two-
equation models. There is a large number of NLEVM in the
literature and they may be categorised as quadratic and cubic
models. Popular quadratic models have been proposed by Gatski
and Speziale [134] and Shin et al. [135], among
others.
The first model is a high-Re k–e model which
supports separation in adverse pressure gradient flows. The model
of Shin
et al. [135] has shown improved results for backward
facing step compared to classical linear eddy viscosity models,
butit also suffers with rotational effects especially for channel
flow [136].
The mathematical formulation of the cubic model by Craft et
al. [137] is selected for presentation here, as a general
form
of the category. The anisotropic tensor and turbulence kinetic
energy are defined as:
aij ¼ uiu jk 2
3dij and k ¼ 1
2ukuk: ð47Þ
The mathematical formulation of the cubic model is as follows
[137]:
aij ¼ vtk
S ij þ c 1 vt~e S ikS kj 1
3S klS kldij
þ c 2 vt~e ðXikS kj þX jkS klÞ þ
c 3
vt~e XikX jk 1
3XlkXlkdij
þ c 4 vtk~e2 ðS kiXlj
þ S kjXliÞS kl þ c 5 vtk~e2
XilXlmS mj þ S ilXlmXmj 2
3S lmXmnXnldij
þ c 6 vtk~e2 S ijS klS kl þ
c 7
vtk~e2
S ijXklXkl; ð48Þ
where S ij is the mean strain-rate tensor and
Xij the mean vorticity tensor:
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 705
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
14/40
S ij ¼ @ ui
@ x jþ @ u j
@ xiXij ¼ @
ui@ x j
@ u j@ xi
: ð49Þ
The empirical coefficients of the model are presented in Table
1, where ~S is the dimensionless strain parameter, ~X the
dimen-
sionless vorticity parameter, ~e the homogenous
dissipation rate, which are defined as:
~S ¼ k~e
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi ffiS ijS ij=2
q ; ~X ¼ k
~e
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXijXij=2
q ; vt ¼ c l k
2
~e : ð50Þ
The model appears better compared to ordinary linear eddy
viscosity models (e.g. for impinging jet flows). The compu-
tational time is approximately 20% more compared to a low-Re
k–e model. One drawback of the model is its performance
for
convex surfaces, according to Craft et al. [137].Another
popular cubic low-Re k–e model was developed by Apsley
and Leschziner [138], with its free parameters cali-
brated with data from DNS data for channel flow. The model leads
to better results for airfoil and diffuser flows compared
to other linear and nonlinear EVM. For more details for the
NLEVM, the interest reader is directed to the review paper by
Hellsten and Wallin [136].
2.3.8. Recent advances in eddy viscosity
modelling
It is worth mentioning some recent eddy-viscosity models, such
as Durbin’s t2-f model (also known as
v2–f ) [139] and f–f model [140]. The
t2–f model is based on the elliptic relaxation concept
and employs two additional equations, apart from
thek and e ones. One for the velocity scale
t2 and one for the elliptic relaxation function, f.
The main motivation for the devel-opment of this model was
the improved modelling in the vicinity of the wall (near-wall
turbulence). More applications (e.g.
rotating cylinder, rotating channel flow, axially rotating pipe
and square duct) and validation of the model with experimental
and DNS data, may be found in the work of Durbin and Petterson
[141].
The f–f model is based on the similar concept of
elliptic relaxation, but instead of solving the t2 equation it
solves for thevelocity scale ratio f = t2/k [140]. The
full equations of the f– f model, which are
similar to those of the t2– f model, are
[140]:
vt ¼ C lfks; ð51Þ
Dk
Dt ¼ @
@ x jv þ vt
rt
@ k
@ x j
þ P e; ð52Þ
DeDt ¼ @
@ x jv þ vt
re
@ e@ x j
þ ðC e1P C e2eÞ
s ; ð53Þ
L2r2 f f ¼ 1s
c 1 þ C 02P
e
f 2
3
; ð54Þ
Df
Dt ¼ @
@ xkv þ vt
rf
@ f
@ xk
þ f f
kP : ð55Þ
Completeness of the model is achieved by Durbin’s
[142] realizability constraints, combined with the lower
bounds (Kol-
mogorov time- and length- scale):
s ¼ max min ke;
a ffiffiffi6
p C ljS jf
!;C s
v
e
0:5" #; ð56Þ
L ¼ C L max min k1:5
e ;
k0:5 ffiffiffi
6p
C ljS jf
!; C g
v3
e
0:25" #; ð57Þ
where a6 1 (recommended
a = 0.6 [140]). The coefficients of this model
are:
C l = 0.22,
C e1 = 1.4(1 + 0.012/f),
C e2 = 1.9,
c 1 =
0.4, C 02 ¼ 0:65, rk =
1, re = 1.3, rf = 1.2, C s =
6.0, C L = 0.36, C g = 85.
Table 1
The model coefficients [136].
c 1 c 2 c 3 c 4
c 5 c 6 c 7
0:05 f q f l
0:11 f q f l
0:21 f q
~S
f lð~S þ~XÞ=20.8 f c 0
0.5 f c 0.5 f c
C l f l0:667r n
1exp 0:415expð1:3n5=6Þ½ f g
1þ1:8n1:1
ffiffi~ee
p 10:8expð~Rt =30Þ½
1þ0:6 A2 þ0:2 A3:52r
n f
q f
c
1 þ 1 exp½ð2 A2Þ3n o
1 þ
4 ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ffiffiffiffi
exp ~Rt 20 r r n
ð1þ0:0086g2Þ0:5 r 2n
1þ0:45n2:5
706 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
15/40
It should be noted that the f–f model is more
stable [141] compared to
the t2– f model. Both models are better for
com-puting wall-bounded flows compared to the classical
low-Re two equation models (e.g. k–x and k–e), but
they are still weakagainst DSM (introduced next in Section
2.4) and advanced NLEVMs. The f–f model
has been extensively validated with
experimental and DNS data for plane channel, backward-facing
step and multiple-impinging jets flows, presenting satisfac-
tory agreement.
Recently, a new robust version of
the t2– f model was proposed by Billiard and
Laurence [143] with improved numericalstability, known
as the BL-t2=k. The model is based on the elliptic blending method
of Manceau and Hanjalic [144] and wasvalidated for
pressure induced separated flows, as well as buoyancy impairing
turbulent flows, with satisfactory results.
More detailed evaluation of the model against other turbulence
models and test cases (e.g. 3-D diffuser and swept wing)
is presented in the work of Billiard et al. [145].
In Fig. 3, the mean velocity streamlines for swept wing are
compared to data
from Implicit Large Eddy Simulation (LES). Both models capture
the leading edge vortex but the secondary vortex region
(red-dashed line) is reproduced by the EBRSM model and secondly
from the BL-t2=k model. A detailed review
of t2– f modelevolution may be found in
the work of Billiard and Laurence [143].
2.4. Differential Second-Moment (DSM) and Algebraic Stress
Models (ASM)
A type of turbulence closure models with great expectations to
replace the widely used k–e model is the
DifferentialSecond-Moment (DSM) or Reynolds Stress (RS) or
Mean-Reynolds Stress (MRS) model. DSM presents natural
superiority
compared to the two equations turbulence models, as it is
physically the more complete model (history, transport and
anisotropy of turbulent stresses are all accounted for). More
specifically, DSM closure models explicitly employ transport
equations for the individual Reynolds
Stresses, u0iu0 j (as well as for
u0 jT 0), each of them representing a separate velocity
scale.The transport equation of u0iu0 j for
an incompressible fluid, excluding effects of rotation and body
force, may be written ingeneral symbolic tensor form as
follows:
Lij þ C ij ¼ P ij þ /ij þ Dij eij;
ð58Þwhere Lij is the local change in
time, C ij the convective
transport, P ij the production by mean-flow
deformation, /ij the stress
redistribution tensor due to pressure strain, Dij the
diffusive transport and eij the viscous dissipation tensor.
The Lij, C ij and P ij
terms do not require any modelling and are given by the
following equations:
Lij þ C ij ¼ @ @ t þ um
@
@ xm
u0iu
0 j; ð59Þ
P ij ¼ u0iu0m@ u j@ xm
þ u0 ju0m@ ui@ xm
: ð60Þ
The remaining terms, /ij, Dij and e ij
need to be modelled. The simplest way to model the viscous
dissipation tensor is byassuming local isotropy:
eij ¼ 23edij; e ¼ v @ um@ um
@ uk@ uk; ð61Þ
where e
is the turbulence dissipation and dij
the Kronecker unit tensor. The diffusion of turbulence
(Dij
) is usually treated by
the popular Daly–Harlow model [146]:
Fig. 3. Mean velocity streamlines over the swept wing
surface, highlighting regions of interest [145].
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 707
http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
16/40
Dij ¼ @ @ xk
C sk
eu0
lu0m
@ u0iu0 j
@ xl
! with C s ¼ 0:25: ð62Þ
Instead of the popular Daly–Harlow model, there are more
advanced models that can be used and have been developed
over the years, such as the models by Magnaudet
[147] and Nagano and Tagawa [148]. More details and
validation of the
above mentioned models can be found in the review paper by
Hanjalic [149].
The radically new feature of the DSM-equation is the
pressure-strain ‘redistribution’ term (/ij), which does not appear
in
the exact solution of k–e equation. This
suggests that the pressure-strain term only serves to redistribute
the turbulenceenergy among its components and to reduce the shear
stresses, thus tending to make the turbulence more isotropic.
The
unknown correlations appearing in the DSM-equation are either
determined by a transport equation or else they are
expressed in terms of second-order
correlations ðu0iu0 jÞ themselves; the latter
procedure, closing the DSM-equation at itsown level, is often
referred to as ‘second-order closure’. The redistribution term,/ij
, is usually modelled by the Isotropization
of Production (IP) model [150]:
/ij ¼ C 1 u0iu0 j 2
3dijk
ek C 2 P ij dij
3 P kk
with C 1 ¼ 1:8 and
C 2 ¼ 0:6: ð63Þ
Improvements of the IP pressure-strain model are the LRR-QI
model by Launder et al. [151], the SSG model by
Speziale
et al. [152], the CL model by Craft and Launder [153],
and LT model by Launder and Tselepidakis [154]. For detailed
evalu-
ation of the models, the interest reader is referred to the work
of Hanjalic and Jakirlic [155]. DSM closure models predict
more accurate physical phenomena which involve streamline
curvature, strong pressure gradients, swirling and system rota-
tion effects [155].
It is important to mention that the initial versions of DSM
models could not perform very well in handling the return to
isotropy [1]. They may, however, work well in flows
dominated by other effects. In addition, the DSM models do not
always
perform better than the two-equation models. For instance,
recent numerical simulations in street canyon flows performed
by Koutsourakis et al. [115] indicated that DSM performance
was not good enough according to the theoretical expectations,
while the RNG k–e model exhibited better results. The
evaluation of the models (DSM, RNG k–e and
standard k–e) was donecomparing to different experimental and
numerical data (LES). Figs. 4 and 5 present numerical
results for the velocity pro-
files compared with experimental data. It is concluded that DSM,
at least as it has been applied in that study, is not more
useful than simpler models for practical use. However, both
modelling and experimental uncertainties are high, so that
extra
attention is required in order to draw any definitive
conclusions about the quality of the models.
Main disadvantages of DSM are the difficulty in the modelling of
more terms in the turbulence equations and the
increased demand on computer resources. The new generation of
DSM closure models have solved most of the above-men-
tioned difficulties but the computational demands are roughly
twice as large as those for the two-equation models, for high -
Re number flows using wall functions [155].
It is worth noting the Elliptic Blending DSM by Manceau and
Hanjalic [144], which belongs to the category of advanced
DSMs. The model is based on the DSM of Durbin [159] but, instead
of resolving equations for the stress components, it adopts
a single elliptic equation [160]. Implementation of EBDSM
for predicting impinging jet flows can be found in the work
of
Thielen et al. [161].
Another interesting approach is the hybridization of DSM with an
eddy viscosity model, recently developed by Basara and
Jakirlic [162]. The model combines the advantages of DSM
along with the robustness of k–e model and it is
known as HybridTurbulence Model (HTM). It may be used as an
initialization model for DSMs in order to stabilize it and reduce
the
Fig. 4. Experiment 4: Non-dimensional horizontal velocity
profiles at leeward and windward side of a street canyon with
aspect ratio H /D = 1 and very
rough walls. Uref is the free stream velocity, equal
to 8 m/s. Experimental data are extractedfrom Kovar-Panskus et al.
[156]. CFD results with the k-e modelfrom theoriginal
paperare also included [115]. ‘‘N. Koutsourakis, J. Bartzis, N.
Markatos, Evaluation of Reynolds stress, k-e andRNG k-e turbulence
models in
street canyon flows using various experimental datasets,
Environmental Fluid Mechanics 12 (2012) 379–403. This is Fig. 6 in
the publication in which thematerial was originally published. With
kind permission from Springer Science and Business Media.’’
708 C.D. Argyropoulos, N.C. Markatos / Applied
Mathematical Modelling 39 (2015) 693–732
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
17/40
computational time. The model has been tested for many flows
such as flow around a car, axially rotating pipe, 180 turned U
bend, backward-facing step and round jet impinging on a flat
plane. The results were better than EVMs and closer to those
obtained by full DSM.Simplified versions of DSMs are the
Algebraic Stress Models (ASM) or Explicit Algebraic Reynolds Stress
Models (EARSM)
[136], obtained by eliminating the transport terms, using
instead those of the kinetic energy equation. EARSM have the
rep-
utation of being simple and easy to implement for boundary layer
flows, while for elliptic, recirculating flows they are very
unstable. In addition, their performance is dependent on the DSM
from which they were derived. This category constitutes
an intermediate-level between DSM and eddy viscosity models.
EARSM are characterised by less computational demands
and higher accuracy compared to LEVM.
First attempt for the derivation of EARSM was done by Pope
[163] for two-dimensional flows and it was later
extended
and refined by Gatski and Speziale [134] and by Jongen and
Gatski [164] for 3-D flows. The EARSM are popular for
predicting
aeronautical flows, in particular with the model by Wallin and
Johansson [165].
Due to space limitations, the interested reader is directed to
the recent review papers by Hellsten and Wallin
[136] and
Alfonsi [106], for the mathematical equations of EARSM.
2.5. Two-fluid models of turbulence
Undoubtedly, the main idea behind a large number of turbulence
models derives from the notion of Boussinesq, who
introduced the idea of an effective viscosity, and of Prandtl
who conceived the notion of turbulence mixing phenomena being
very similar to those treated by the dynamical theory of gases.
The mathematical background of convectional turbulence
theory reflects only the unstructured diffusion of the
molecular-collision process; large structure formation and
growth,
and fine-structure creation and stretching, are nowhere to be
found.
The above-mentioned facts led Spalding [166], among others,
to the development of the ‘two-fluid’ theory, briefly pre-
sented below. The origins of two-fluid model ideas are to be
found back in the 1940’s and 1950’s, particularly in the field
of turbulent combustion.
The following two-fluid model results in the prediction of the
intermittency and of the conditional flow variables within
the turbulent and non-turbulent zones of the flow. The model was
proposed by Spalding [166] and then developed by Malin
[167] for the investigation of intermittency in free
turbulent shear flows.
The Spalding model is designed on an analogy between
intermittent flows and two-phase flows, rather than on any spe-
cific and rigorous closure of conditional-averaged transport
equations. It is supposed that two-fluids share occupancy of
the
same space, although not necessarily at the same time, their
share of space being measured by the volume fractions. There
are many ways in which the two-fluids can be distinguished. In
case of turbulence intermittency computations, it is conve-
nient to define the fluids as ‘turbulent’ and ‘non-turbulent’.
The equations governing the motion of the turbulent and non-
turbulent fluids are given in detail by
Markatos [1,79].
Improvement and expansion of the model for turbulent combustion
was presented by Markatos and Kotsifaki [168]. Fur-
thermore Shen et al. [169] used a two-fluid model to
simulate turbulent stratified flows, while Yu et al.
[170] established a
modified two-fluid model to simulate the flow and heat transfer
characteristics of air curtains in an open vertical display
cabinet. For Rayleigh–Taylor mixing so far only two models have
been developed, namely Youngs’ model [171] and two-
structure two-fluid two-turbulent (2SFK) model [172]. Liu
et al. [173] applied two-fluid model for predicting the
flow in
UV disinfection reactor. Finally, Cao et al.
[174] used the model for the design of air curtains for
open vertical refrigerated
display cases. The numerical results compared with experimental
data present good agreement.
Fig. 5. Experiment 6: Performance of the three turbulence
models against experimental data extracted from Li et al.
[157] in a street canyon with aspect
ratio H /D = 2. LES results of Li et
al. [158] are also included [115]. ‘‘N.
Koutsourakis, J. Bartzis, N. Markatos, Evaluation of Reynolds
stress, k-e and RNG k-eturbulence models in street
canyon flows using various experimental datasets, Environmental
Fluid Mechanics 12 (2012) 379–403. This is Fig. 8 in the
publication in which the material was originally published. With
kind permission from Springer Science and Business Media.’’
C.D. Argyropoulos, N.C. Markatos / Applied Mathematical
Modelling 39 (2015) 693–732 709
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/18/2019 advanes in Turbulent Modelling
18/40
2.6. Large Eddy Simulation (LES)
Another modelling approach, promising to be more accurate and of
wider applicability than RANS and less computation-
ally demanding than DNS, is the Large Eddy Simulation (LES)
approach. In LES of turbulence, the important large scales are
fully resolved whilst the small sub-grid scales are modelled.
The main advantage of LES compared to RANS models is that in
the former only the small, isotropic turbulent scales are
modelled and not the entire spectrum (Fig. 6) as it is the case in
the
latter. The LES approach is extremely useful for the
investigation of turbulence at high Reynolds numbers, for the
develop-
ment and assessment of new turbulence models, and for the
prediction of complex flows where other turbulence models
may prove inadequate [176,177].
The first attempts of LES are found in the pioneering works of
Smagorinsky [178] and Lilly [179] in meteorology and Dear-
dorff [180] in engineering. Since then, LES has
seen a tremendous popularity for the study of turbulent flows. The
develop-
ment and testing of LES has concentrated at first on isotropic
turbulence by Kraichnan [181] and
Chasnov [182] and on
turbulent channel flow by Deardorff [180],
Schumann [183], Moin and Kim [184] and Piomelli
[185]. The basic steps of
LES method, according to Pope [24] and Berselli et
al. [25] are: (a) a filtering operation of the N–S
equations; (b) a closure
model for SGS stress tensor; (c) imposition of the appropriate
boundary and initial conditions with special care for near wall
modelling; (d) selection of the suitable numerical method for
spatial and temporal discretization of N–S equations and (e)
performance of the numerical simulation.
Instead of time-averaging, a spatial filtering approach is
adopted in order