-
Struct Multidisc Optim (2009) 38:301316DOI
10.1007/s00158-008-0292-x
INDUSTRIAL APPLICATION
Aeroelastic topology optimization of membrane structuresfor
micro air vehicles
Bret Stanford Peter Ifju
Received: 7 March 2008 / Revised: 2 May 2008 / Accepted: 10 June
2008 / Published online: 19 July 2008 Springer-Verlag 2008
Abstract This work considers the aeroelastic optimiza-tion of a
membrane micro air vehicle wing throughtopology optimization. The
low aspect ratio wing isdiscretized into panels: a two material
formulation onthe wetted surface is used, where each panel can
bemembrane (wing skin) or carbon fiber (laminate re-inforcement).
An analytical sensitivity analysis of theaeroelastic system is used
for the gradient-based op-timization of aerodynamic objective
functions. An ex-plicit penalty is added, as needed, to force the
structureto a 01 distribution. The dependence of the solu-tion upon
initial design, angle of attack, mesh density,and objective
function are presented. Deformation andpressure distributions along
the wing are studied forvarious load-augmenting and
load-alleviating designs(both baseline and optimized), in order to
establisha link between stiffness distribution and
aerodynamicperformance of membrane micro air vehicle wings. Thework
concludes with an experimental validation of thesuperiority of
select optimal designs.
Keywords Micro air vehicle Topology optimization Aeroelastic
membrane wing
Nomenclature
a adjoint vectorA aeroelastic Jacobian
B. Stanford (B) P. IfjuDepartment of Mechanical and Aerospace
Engineering,University of Florida, Gainesville, FL 32611,
USAe-mail: [email protected]
angle of attackb wingspan small number to prevent singularityc
root chordC vortex lattice influence matrixCD drag coefficientCL
lift coefficientCL lift slopeCm pitching moment slopeD carbon fiber
flexural rigidityg objective functionG aeroelastic system of
equations horseshoe vortex circulationsK reduced global stiffness
matrixKe element stiffness matrixKp, Km carbon fiber and membrane
stiffness
matricesL vortex lattice source vectorL/D efficiencyn wing
outward normalp nonlinear power lawP, Q interpolation matricesr
aeroelastic responseR penalty parameterS sensitivity of objective
function to vortex
circulationsT in-plane membrane pre-stress resultantu solution
to finite element analysisuo, vo, wo induced velocitiesU
free-stream velocityw out-of-plane displacementx, y chordwise and
spanwise positionX element densitieszo, z rigid and flexible wing
shapes
-
302 B. Stanford, P. Ifju
1 Introduction
This work considers the design of flexible micro airvehicle
wings (MAVs, with a wingspan less than 15 cm)through aeroelastic
topology optimization. The struc-ture for these vehicles resemble
larger hang gliders andsail wings (Ormiston 1971): a flexible
membrane sur-face (latex rubber, in this case) strategically
reinforcedwith stiffer rib and batten structures (carbon fiber
lam-inates). The flight performance of flexible MAVs hasindicated
several desirable properties directly attribut-able to the elastic
nature of the wing: primarily, passiveshape adaptation (Albertani
et al. 2007). Dependingupon the nature of the laminate
reinforcement (ofwhich the trailing edge is particularly
important), thewing deformation may be able to alleviate the
flightloads (which may reduce the drag, delay stall, or pro-vide
gust rejection) or augment the flight loads (higherlift, longer
static stability margins). Either methodologymay be preferred (or
perhaps a compromise betweenthe two), depending upon flight
environment (indooror outdoor flight), payload, propulsion, range
and du-ration requirements. This problem can be solved
bydiscretizing the wing into panels for an aeroelastictopology
optimization study, with a two-material for-mulation (each panel
can be stiff carbon fiber lami-nate or flexible latex membrane) on
the wetted surfaceof the wing. A series of aerodynamic objective
func-tions can be considered, including L/D, CL, CD, CL ,and Cm
.
The basics of topology optimization are given byZuo et al.
(2007): the design domain is discretized,and the relative density
of each element can be 0(void) or 1 (solid). Early work in this
field optimizesa structure under static loads by minimizing the
com-pliance with an equality constraint upon the volumefraction,
though applications of topology optimizationhave expanded
dramatically in recent years. A reviewof the extensive and
disparate applications that havebeen successfully solved with
topology optimization isgiven by Eschenauer and Olhoff (2001),
Bendse andSigmund (2003), and Bendse et al. (2005).
Solving a topology optimization scheme with strictlydiscrete
design variables is rare; Anagnostou et al.(1992) utilize simulated
annealing, while Deb and Goel(2001) and Wang et al. (2006) use a
genetic algorithm(with the latter paper providing a detailed
literaturereview of the topic). Beckers (1999) uses a dual methodto
solve the large-scale discrete problem, while recentwork by Stolpe
and Stidsen (2006) use a hierarchi-cal technique: the topology
optimization problem issolved on successively refined meshes. The
optimumobtained from the previous coarse mesh is used as a
good starting point for a local search algorithm, solvedas a
convex mixed 01 program. The computationalrequirements of such
binary techniques can be severefor even moderately-sized problems,
however. A more-commonly utilized strategy lets the density vary
contin-uously between 0 and 1 and then penalizes intermediatevalues
during the optimization (Bendse and Sigmund2003), and is used for
this work.
As noted by Stegmann and Lund (2005a), solid-voidtopology
optimization of engineering shell structureshas little practical
relevance: holes in the structure candepreciate the ability of the
structure to carry mem-brane loads, and may be completely forbidden
outof aerodynamic considerations. Two (or more) mate-rial
formulations can potentially be used; interpolationschemes for such
a model are given by Bendse andSigmund (2003), and a similar
interpolation is used inthis work. Alternatively, layered shell
models may beused, by constructing the shell from a combination
ofsolid layers and artificial layers (which may or may notbe void).
As discussed by Lee et al. (2000), the lay-up can use single
artificial layers (potentially resultingin holes), two layers for
an eccentric stiffness aboutthe mid-surface, or three layers with
potential enclosedvoids or holes concentric to the midplane. This
work isextended by Stegmann and Lund (2005b), who locatethe optimal
distribution of glass/epoxy laminate andpolymeric foam in a shell
structure, as well as the fiberangles of the former.
From a literature standpoint, aeronautical applica-tions of
topology optimization of structures are rare;aeroelastic
applications are rarer still. The literaturecan be roughly divided
into three categories. The firstuses an aerodynamic solver to
compute the pressuredistribution over the wing (during steady
flight, pull-upmaneuvers, etc). This load distribution is then
appliedto the structure for optimization: global metrics suchas
compliance, weight/volume fraction, and vibrationfrequency or local
metrics such as displacement andstress objective functions and
constraints can all be con-sidered. The re-distribution of the
aerodynamic loadingdue to elastic wing deformation is ignored. The
secondcategory explicitly uses the aerodynamic performanceof a
flexible wing for objective functions or constraints,and
necessarily includes aeroelastic coupling. The thirdcategory is
topology optimization of channel flows:changes in the force
imparted by a fluid flow are notmade with flexible structures, but
by dividing the com-putational domain into either fluid or solid
elements.
Literature indicative of the first category can befound in the
work of Balabanov and Haftka (1996),who optimize the internal
structure of a transport wing,using a ground structure approach
(the domain is filled
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 303
with interconnected trusses, and the cross-sectionalarea of each
is a design variable (Bendse and Sigmund2003)) for compliance
minimization. Eschenauer andOlhoff (2001) optimize the topology of
an internal wingrib under both pull-up load maneuvers and
internaltank pressures, using a bubble method. Krog et al.(2004)
also optimize the topology of wing box ribs, anddiscuss methods for
interpretation of the results to forman engineering design,
followed by sizing and shapeoptimization. Luo et al. (2006) compute
the optimaltopology of an aerodynamic missile body, consideringboth
static loads and natural frequencies.
Aeroelastic topology optimization (second categorydiscussed
above) is an under-served method of aircraftdesign, presumably due
to the large computational costassociated with such an undertaking.
The seminal workin this field is given by Maute and Allen (2004),
whoconsider the topological layout of stiffeners within aswept
wing, using a three-dimensional Euler solvercoupled to a linear
finite element model. Results froman adjoint sensitivity analysis
of the coupled aeroelasticsystem (Maute et al. 2002; Martins et al.
2001) are fedinto an augmented Lagrangian optimizer to minimizemass
with constraints upon the lift, drag, and wingdisplacement. The
authors are able to demonstrate thesuperiority of designs computed
with aeroelastic topol-ogy optimization, rather than considering a
constantpressure distribution. This research effort is extendedby
Maute and Reich (2006) for topology optimizationof a compliant
morphing mechanism within an airfoil,considering both passive and
active shape deforma-tions. Superior optima are found with this
method,as compared to a jig-shape approach: optimizing
theaerodynamic shape, and then locating the mechanismthat leads to
such a shape. Very recent work is givenby Gomes and Suleman (2008),
who use a spectrallevel set method to maximize aileron reversal
speedby reinforcing the upper skin of a wing torsion box
viatopology optimization.
For the third category listed above, early work inthe topology
optimization of fluid flows is given byBorrvall and Petersson
(2003), who divide the designdomain into fluid and solid elements.
Flow is assumedto be governed by Stokes differential equations
forcreeping planar flows. Interpolation between fluid andsolid is
obtained by means of the distance between thetwo surfaces that
contain the fluid. Gersborg-Hansenet al. (2005) extend this
technique to account for fluidinertia in the governing equations,
thus utilizing a non-linear flow model. Pingen et al. (2007) find
the mini-mum drag profile of submerged bodies, using a
latticeBoltzmann method as an approximation to the NavierStokes
equations. Drag is minimized by a football shape
(with front and back angles of 90) at low Reynoldsnumbers (where
reducing surface area is important),and a symmetric airfoil at
higher Reynolds numbers(where streamlining is more important).
The research detailed in this work is solely con-cerned with the
second category discussed above:aeroelastic topology optimization
of a thin flexible mi-cro air vehicle wing. This work details the
locationof holes within a carbon fiber wing shell, holes whichwill
then be covered with a thin, taught, rubber mem-brane skin.
Numerically, the wing will be discretizedinto a series of panels,
wherein each panel can bea carbon fiber laminated shell or an
extensible latexrubber skin. The wings performance is determined by
astatic aeroelastic solver, and objective functions consistof lift,
drag, and pitching moment-based aerodynamicmetrics. Nonlinear
interpolation schemes allow eachwing panel to vary continuously
between carbon fiberskeleton and rubber membrane skin,
necessitating anadjoint sensitivity analysis of the coupled
aeroelasticsystem.
The remainder of this work is organized as fol-lows. A brief
description of membrane micro air ve-hicle aeroelasticity is given,
followed by details of thetopology optimization within the wing
structure, andhow the technique fits into the overall design
schemerequired for MAVs. This is followed by the compu-tational
framework: material interpolation, the staticaeroelastic model,
sensitivity analysis, and optimizationprocedures. Results are then
given in terms of con-vergence histories, and the dependence of the
optimaldesign (upon initial design, flight conditions, mesh
den-sity, and objective functions). Lift generation as seen bythe
topology optimizer is examined in detail, in orderto elucidate
several load-alleviating and -augmentingmechanisms. The work is
concluded with an experimen-tal validation of the superiority of
select optimal designsover baseline wing structures.
2 Membrane micro air vehicle wings
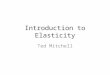
Two extensively-flight tested membrane wing topolo-gies are
given in Fig. 1. On the left of the figureis a batten-reinforced
wing design (BR), where threecarbon fiber strips (battens) are
imbedded into eachmembrane semi-wing. The trailing edge of this
designis permitted to lift up due to an applied pressure load.The
nose-down geometric twist of each wing sectionwill alleviate the
flight loads, and possibly decreaseCD, and CL (as compared to a
rigid wing; Albertaniet al. 2007). Conversely, on the right side of
Fig. 1is a perimeter-reinforced wing design (PR). Now the
-
304 B. Stanford, P. Ifju
Fig. 1 Batten-reinforced(left) and perimeter-reinforced (right)
membranewing designs
trailing edge is constrained by a laminate perimeter,and the
membrane skin will inflate due to an appliedload. This aerodynamic
twist of each flexible wing sec-tion will augment the flight loads,
and possibly increaseCL and decrease Cm (Albertani et al.
2007).
A rigorous aeroelastic topology optimization of themembrane
wings may be able to produce structures thatout-perform these two
designs. A fairly fine structuralgrid is needed to resolve
topologies on the order ofthose seen in Fig. 1, which will, of
course, increase thecomputational cost associated with the
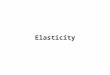
optimization.The wing is discretized into a set of
quadrilaterals,which represent the density variables: 0 or 1.
Thesequadrilaterals are used as panels for the aerodynamicsolver,
and broken into two triangles for the finiteelement solver, as
shown in Fig. 2. As in Fig. 1, thewing topology at the root,
leading edge, and wing tip isfixed as carbon fiber, to maintain
some semblance of anaerodynamic shape capable of sustaining lift.
The wingtopology in the figure is randomly distributed.
It should also be noted that aeroelastic topologyoptimization is
one of many techniques that should betaken into account when
designing a micro air vehi-cle: Torres (2002), for example,
minimizes a combina-tion of payload, endurance, and agility
metrics, withwing/tail planform, aspect ratio, propeller location,
andangle of attack variables. This work fixes all of these
variables, and only considers un-constrained single-objective
topology optimization of longitudinal aerody-namic performance
metrics. The goal of this researchis to provide insight into the
complex relationship be-tween stiffness distribution and
aerodynamic behaviorof a membrane MAV wing, with the future goal
ofutilizing this technique as part of a larger, global
designscheme.
3 Computational framework
3.1 Material interpolation
Topology optimization with continuous density vari-ables may
require a mechanism to push the final struc-ture to a 01
distribution. An implicit penalty uponintermediate densities can be
achieved through anonlinear power law interpolation. This technique
isknown as the solid isotropic material with penalizationmethod, or
SIMP (Zuo et al. 2007). The power lawseffectiveness as an implicit
penalty is predicated upona volume constraint: intermediate
densities are unfa-vorable, as their stiffness is small compared to
theirvolume (Bendse and Sigmund 2003). For the two-material wing
considered above (membrane or carbon
Fig. 2 Sample wing topology(left), aerodynamic mesh(center), and
structural mesh(right)
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 305
fiber), the stiffness matrix Ke of each finite element inFig. 2
can be computed as:
Ke =(Kp (1 ) Km
) Xpe + Km + Kp (1)where Kp and Km are the plate and membrane
ele-ments, respectively (the latter with zeros placed withinrows
and columns corresponding to bending degrees offreedom). is a small
number used to prevent singular-ity in the pure membrane element
(due to the bendingdegrees of freedom), Xe is the density of the
element,varying from 0 (membrane) to 1 (carbon fiber), and pis the
nonlinear penalization power.
No volume constraint is utilized here, due to an un-certainty
upon what this value should be. Furthermore,for aeronautical
applications it may be desired to mini-mize the mass of the wing
itself, as discussed by Mauteand Allen (2004). Regardless, the
nonlinear power lawof SIMP is still useful for the current
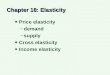
application, asdemonstrated in Fig. 3. Both linear and nonlinear
ma-terial interpolations are given for the lift computation(the
aeroelastic model used here is described below),and the wing
topology is altered uniformly.
For the linear interpolation (i.e., without SIMP),
theaeroelastic response is a weak function of the densityuntil X
becomes very small (0.001), when the sys-tem experiences a very
sharp change as X is furtherdecreased to 0. This is a result of the
large stiffnessimbalance between the carbon fiber laminates and
themembrane skin, and the fact that lift is a direct functionof the
wings compliance (the inverse of the weightedsum of the two
disparate stiffness matrices). The inclu-sion of a nonlinear
penalization power (p = 5), spreadsthe response evenly between 0
and 1: at X = 0 and 1,both linear and nonlinear interpolation
curves coincide.Aeroelastic topology optimization with linear
materialinterpolation experiences convergence difficulties, as
Fig. 3 Effect of linear and nonlinear material interpolationupon
lift
the gradient-based technique struggles with the
nearly-disjointed design space; a penalization power of 5
isutilized for the remainder of this work. It can also beseen in
Fig. 3 that the sensitivity of the aeroelastic re-sponse to element
density is zero for a pure membranewing (X = 0), as can be inferred
from the interpolationequation above. As such, using a pure
membrane wingas an initial guess for optimization will not work, as
thedesign wont change.
Two local optima exist in the design space of Fig. 3,which may
prevent the gradient-based optimizer fromconverging to a 01
material distribution. To counteractthis problem, an explicit
penalty on intermediate densi-ties is added to the objective
function (Chen and Wu2008):
R NX
i=1sin (Xi ) (2)
where R is a penalty parameter appropriately sized soas not to
overwhelm the aerodynamic performance ofthe wing topology. Several
potential issues may appearwith this formulation: the inclusion of
a large penaltyearly in the optimization process will upset the
compro-mise between improving the aerodynamic performanceand
removing intermediate densities. In order to pre-vent such
interference, this penalty is only added whenand if the aeroelastic
optimizer has converged upon adesign with intermediate densities. R
is sized such thatthe penalty is 1015% of the objective function,
and isnot increased during the optimization process. Such astrategy
is not found to significantly alter the optimaltopology, as will be
discussed below.
3.2 Static aeroelastic analysis
Due to the large number of expected function eval-uations (200)
needed to converge upon an optimalwing topology, and the required
aeroelastic sensitivities(computed with an adjoint method), a
lower-fidelityaeroelastic model is used for the current
application.The membrane elements within the wing structure
areassumed to obey Poissons differential equation fora taught
elastic membrane subjected to a transversedistributed pressure
(Cook et al. 2002):
2w = p/T (3)where p is the applied pressure, w is the
out-of-planedisplacement, and T is the in-plane pre-stress
resultant.This linear membrane model is known to be accurate,as
long as the plane strains that develop within the elas-tic sheet
due to the pressure loading are much smallerthan the original
pre-strains. Discretization of the wing
-
306 B. Stanford, P. Ifju
into finite elements leaves one degree of freedom permembrane
node: the out-of-plane displacement w. Sim-ilarly, the carbon fiber
elements within the wing areassumed to be governed by:
4w = p/D (4)where D is the plates flexural rigidity, and the
or-thotropy of the plain weave laminate is ignored. Eachnode of a
plate element will have three degrees of free-dom: one out-of-plane
displacement, and two rotations.The finite element mesh is seen on
the right of Fig. 2.
A linear vortex lattice method is used to computethe aerodynamic
pressure distribution over the flexiblewing. The continuous
distribution of bound vorticity isapproximated by discretizing the
wing into a paneledgrid, and placing a horseshoe vortex upon each
panel.Each horseshoe vortex is comprised of a bound vortex(which
coincides with the quarter-chord line of eachpanel), and two
trailing vortices extending downstream.Each vortex filament creates
a velocity whose magni-tude is assumed to be governed by the
BiotSavartlaw (Katz and Plotkin 2001). Furthermore, a controlpoint
is placed at the three-quarter-chord point of eachpanel. The
tangency condition is applied (i.e., the wingbecomes a streamline
of the flow) by stipulating thatthe induced flow (from the
horseshoe vortices) alongthe outward normal at each control point
exactly can-cels with that caused by the free-stream velocity.
Thefollowing system of equations results:
C11 C12 C1NC21 C22 C2N...
.... . .
...
CN1 CN2 CNN
12...
N
=
{U cos () , 0,U sin ()} n1{U cos () , 0,U sin ()} n2
...
{U cos () , 0,U sin ()} nN
(5)
The source vector in (5) assumes longitudinal flow
(noside-slip): U is the free-stream velocity, the angleof attack of
the wing, and ni the outward normal ofthe wing at the ith control
point. i is the unknowncirculation strength of each horseshoe
vortex, and theinfluence coefficients are given by:
Cij = {uo, vo, wo}ij ni (6)where uo,i j, vo,i j, and wo,i j are
the velocities inducedat the ith control point by the jth horseshoe
vortex.Further information on the vortex lattice method usedhere
can be found by Katz and Plotkin (2001). Pro-peller, fuselage, and
stabilizers are not included in the
analysis, and the resulting aerodynamic mesh is given inthe
center of Fig. 2.
Drag computations present a problem for this in-viscid modeling
technique, which can only provide in-duced drag due to lift (the
downwash of the finite spandeflects the local velocity vector at
each wing sectiondownward, tilting the lift vector slightly
backward toprovide a small drag force): drag due to flow
separa-tion and viscous shear is unaccounted for. The latterterms
are included by augmenting the drag with a non-zero CDo, estimated
from experimental data to be 0.05.The viscous drag terms are not
truly constant (flowseparation generally increases with angle of
attack, forexample), and so the vortex lattice method is expectedto
under-predict the overall drag. Previous work hasshown this method
to provide an adequate computa-tion of drag (as well as lift and
pitching moments) atmoderate angles of attack, as compared to wind
tunneldata, for micro air vehicle wings (Stanford et al. 2007a).It
should also be noted here that higher-fidelity aero-dynamic
modeling techniques are available: unsteadymethods that model the
wing-wake interactions, as wellas panel methods suitable for
simulations of entirevehicles.
Aeroelastic coupling is facilitated by considering thesystem as
defined by a three field response vector r:
r = {uT zT T }T (7)where u is the solution to the system of
finite elementequations (composed of both displacements and
rota-tions) at each free node, z is the shape of the flexiblewing,
and is the vector of unknown horseshoe vortexcirculations (the
solution vector of (5)). The coupledsystem of equations G(r) is
then:
G (r) =
K u Q z zo P u
C L
= 0 (8)
The first row of G is the finite element analysis: K is
thestiffness matrix assembled from the elemental matrices,and
appropriately reduced based upon fixed boundaryconditions along the
wing root. Q is an interpolationmatrix that converts the
circulation of each horseshoevortex into a pressure, and
subsequently into the trans-verse force at each free node. The
second row of G isa simple grid regeneration analysis: zo is the
original(rigid) wing shape, and P is a second interpolationmatrix
that converts the finite element state vector intodisplacements at
each free and fixed node along thewing. The third row of G is the
vortex lattice method,rewritten from (5): C is the influence matrix
dependingsolely on the wing geometry, and L is the source
vector
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 307
depending on the wings outward normal vectors, theangle of
attack, and the free stream velocity. Conver-gence of this system
can typically be obtained within 25iterations, when the logarithmic
error in the wings liftcoefficient is less than 5.
3.3 Adjoint sensitive analysis
As the number of variables in the aeroelastic system(essentially
the density of each element) will alwaysoutnumber the constraints
and objective functions, asensitivity analysis can be most
effectively carried outwith an adjoint analysis. The sought-after
total deriv-ative of the objective function with respect to
eachdensity variable is given through the chain rule:
dgdX
= gX
+ gr
T
drdX
(9)
where g is the objective function and r is the aeroelas-tic
state vector of (7). The term g/X is the explicitportion of the
derivative, while the latter term is theimplicit portion through
dependence on the aeroelasticsystem (Haftka and Grdal 1992). Only
aerodynamicobjective functions are considered in this work:
theexplicit portion is then zero, unless the intermediatedensity
penalty (2) is included.
The derivative of the objective function with respectto the
aeroelastic state vector is:
gr
= {0 0 ST }T (10)where S is the derivative of the aerodynamic
objectivefunction with respect to the vector of horseshoe
vortexcirculations. For metrics such as lift and pitching mo-ment,
g = ST , though more complex expressions existfor drag-based
metrics. The derivative of the aeroelasticstate vector with respect
to the element densities isfound by differentiating the coupled
system:
dG (X, r)dX
= 0 GX
+ A drdX
= 0 (11)Only the finite element analysis of the aeroelastic
sys-tem contains the element densities, and so the deriva-tive of
the aeroelastic system with respect to the densityvariables is
then:
GX
=
KX u
00
(12)
A is the Jacobian of the aeroelastic system, defined by:
A = Gr
=
K 0 Q
P I 00 dC
/dz L/z C
(13)
The terms from (1013) are inserted into (9); the im-plicit
portion of the derivative becomes a triple productwhich is solved
with the adjoint method. The adjointvector does not contain the
density of each element (X),and only needs to be solved once, as
intended:
a = AT gr
(14)
Two three-dimensional tensors are required for theadjoint
method. From a computational standpoint bothare relatively sparse,
but K/X (12) is fairly inex-pensive to compute (Haftka and Grdal
1992), whiledC/dz (13) is very intensive, and represents a
signif-icant portion of the cost associated with the
gradientcalculations. The former term is mostly zero: as seen
inFig. 2, each quadrilateral wing panel is divided into
twotriangles. As such, K/Xi only receives contributionsfrom two
element stiffness matrices, and the remainderof the assembled
matrix is zero. The dC/dz term isthe derivative of the influence
matrix with respect tothe wing shape, and requires a sensitivity
analysis of theBiotSavart law. z is defined at the nodes of the
meshin Fig. 2, or the corners of each vortex panel. As such,a
change in a single zi will the change the geometricalposition of up
to four control points and four horseshoevortices (both of which
are defined within the panels):dC/dzi is then found to be a sparse
matrix with up tofour non-zero rows and columns.
The second derivative of the objective function isrequired if
aerodynamic derivative metrics such as CLand Cm are of interest.
Two options are available forthis computation. The first involves a
similar analyticalapproach to the one described above. This would
even-tually necessitate the extremely difficult computationof A/r,
which is seldom done in practice (Mauteet al. 2002). For the
current work, only C dependson the aeroelastic state vector, while
the rest of theJacobian would be zero. Nonetheless, this
remainingterm d2C/dz2 is a four-dimensional tensor, and
thecomputational complexities and cost associated with
itsconstruction is expected to be severe. As an alternative,finite
differences are used here:
g2
X 1
(gX
( +) gX
()
)(15)
The term g/ can be computed using anotherfinite difference, or
with the adjoint method describedabove, substituting the angle of
attack for the elementdensities X.
In order to solve the linear system of the Jaco-bian matrix, a
staggered approach is adapted, ratherthan solving the entire system
of (un-symmetric sparse)equations as a whole (Maute et al. 2002).
Each
-
308 B. Stanford, P. Ifju
sub-problem is solved with the same algorithm usedin the
aeroelastic solver (direct sparse solver for thefinite element
equations, and an iterative GaussSeidelsolver for the vortex
lattice equations), and as such, thecomputational cost and number
of iterations neededfor convergence is approximately equal between
theaeroelastic solver and the adjoint vector solver. Thesize of the
numerical system is moderate: each opti-mization iteration requires
3 min of simulation timeon a Compaq Alpha workstation with a UNIX
OSF1V5.0 910 operating system (for the 30 30 grid over
thesemi-wing, as seen in Fig. 2), with construction of
dC/dzallocated about 50% of this time. The computationalcost can be
expected to decrease for stiffer wings.
3.4 Optimization framework
In order to ensure the existence of the optimal wingtopologies,
a mesh-independent filter is employed.Such a filter acts as a
moving average of the gradi-ents throughout the membrane wing, and
limits theminimum size of the imbedded carbon fiber struc-tures
(Bendse and Sigmund 2003). As no constraintsare included in the
optimization, an unconstrainedFletcherReeves conjugate gradient
algorithm (Haftkaand Grdal 1992) is employed. Step size is kept
con-stant, at a reasonably small value to preserve the fi-delity of
the sensitivity analysis. In order to increasethe chances of
locating a global optimum, each opti-mization is run with three
distinct initial designs:Xo = 1 (carbon fiber wing), Xo = 0.5, and
Xo = 0.1. A
pure membrane wing (Xo = 0) cannot be considered forreasons
discussed above.
4 Results
Five objective functions are considered in this work:two
load-augmenting metrics (maximum lift and min-imum Cm), two
load-alleviating metrics (minimumdrag, and minimum CL) and
efficiency (maximumL/D). The MAV wing under consideration has
aZimmerman planform, with a 152 mm wingspan,124 mm root chord, and
an aspect ratio of 1.25.7of positive geometric twist (nose up) is
built into thewingtip, with 7 of dihedral between 2y/b = 0.4 and
thewingtip. Both a reflex airfoil and a singly-curved airfoilare
studied (the former mitigates the pitching momentof the wing, and
allows for the removal of a horizontalstabilizer to decrease the
size of the MAV). Both havea maximum camber at the root of 6.8% (at
x/c = 0.22),and the former airfoil has a maximum reflex at the
rootof 1.4% (at x/c = 0.86). Flight speed is kept constantat 13 m/s
(equating to a Reynolds number of 105), butboth 3 and 12 angles of
attack are considered, with a of 1 for finite differences. The
flexural rigidity ofthe carbon fiber laminates is 0.5 Nm, and the
pre-stressresultant of the latex membrane is 7 N/m. The thicknessof
the former is 0.5 mm, and the latter is 0.1 mm.
A typical convergence history of the aeroelastictopology
optimizer can be seen in Fig. 4, for a re-flex wing at 3 angle of
attack, with a maximum L/Dobjective function. Results are computed
with a 30
Fig. 4 Convergence historyfor maximizing L/D, = 3,reflex wing
(30 30 grid overthe semi-wing)
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 309
30 grid over the semi-wing, and the initial guess is
anintermediate density of 0.5. Within four iterations, theoptimizer
has removed all of the carbon fiber adjacentto the root of the
wing, with the exception of theregion located at three-quarters of
the chord, whichcorresponds to the inflection point of the reflex
airfoil.The material towards the leading edge and at the wingtip is
also removed. Further iterations see topologicalchanges
characterized by intersecting threads of mem-brane material that
grow across the surface, leaving be-hind islands of carbon fiber.
These structures arentconnected to the laminate wing, but are
imbeddedwithin the membrane skin.
These results indicate two fundamental differencesbetween the
designs in Fig. 1 and those computedvia aeroelastic topology
optimization. The first is thepresence of islands; these designs
can be built, butthe process is significantly more complicated than
witha monolithic wing skeleton. Such structures could beavoided
with a manufacturability constraint/objectivefunction (such as
discussed by Lyu and Saitou (2005)),but the logistics of such a
metric are difficult to formu-late. Furthermore, the aeroelastic
advantages of free-floating laminate structures are significant, as
will bediscussed below. A second difference is the fact thatthe
designs of Fig. 1 are composed entirely from thinstrips of carbon
fiber embedded within the membrane,while the topology optimization
is apt to utilize two-dimensional laminate structures.
After 112 iterations in Fig. 4, the optimization haslargely
converged (with only minimal further improve-ments in L/D), but
some material with intermedi-ate densities remains towards the
leading edge of thewing. Many techniques exist for effectively
interpretinggray level topologies (Hsu and Hsu 2005); the
explicitpenalty of (2) is used here. Surprisingly, the L/D seesa
further increase with the addition of this penalty,contrary to the
conflict between performance and 01convergence reported by Chen and
Wu (2008). Theexplicit penalty does not significantly alter the
topology,
but merely forces all of the design variables to theirlimits, as
intended.
The final wing skeleton has three trailing edge bat-tens (one of
which is connected to a triangular structuretowards the center of
the membrane skin), and a fourthbatten oriented at 45 to the flow
direction. The struc-ture appears to be a topological combination
of a BRand a PR wing, with both battens and membrane infla-tion
towards the leading edge. The optimized topologyincreases the L/D
by 9.5% over the initial design, and(perhaps more relevant, as the
initial intermediate-density design does not technically exist) by
10.2% overthe rigid wing.
The affect of mesh density is given in Fig. 5, for areflex wing
at 12 angle of attack, with L/D maximiza-tion as the objective
function. The 30 30 grid, forexample, indicates that 900 vortex
panels (and 1,800finite elements) cover each semi-wing. As the
leadingedge, root, and wing tip of each wing are fixed ascarbon
fiber, 480 density design variables are left for thetopology
optimization. One obvious sign of adequateconvergence is the
efficiency of the rigid wing, withonly a 0.44% difference between
that computed on thetwo finer grids. The optimal wing topologies in
Fig. 5are similar, with three distinct carbon fiber
structuresimbedded within the membrane skin. While the 20 20 grid
is certainly too coarse to adequately resolvethe geometries of
interest, the topology computed onthe 30 30 grid is very similar to
that computed on the40 40 grid. The computational cost of each
optimiza-tion iteration upon the coarser grid is five times
lessthan that seen for a 40 40 grid, and will be used forthe
remainder of this work.
The affect of the initial starting design is given inFig. 6, for
a reflex wing at 12 angle of attack, with dragminimization as the
objective function. As mentionedabove, Xo = 1 (carbon fiber wing),
Xo = 0.5, and Xo =0.1 are all considered. The three final optimal
topolo-gies are very different, indicating a large dependencyupon
the initial guess and no guarantee that a global
Fig. 5 Affect of mesh densityupon optimal L/D topology, = 12,
reflex wing
-
310 B. Stanford, P. Ifju
Fig. 6 Affect of initial designupon the optimal CDtopology, =
12, reflex wing
optimum has been located. Nevertheless, the
indicatedimprovements in drag are promising, with a potential6.7%
decrease from the rigid wing. As expected, thedenser the initial
topology, the denser the final opti-mized topology.
All three wing topologies utilize some form of adap-tive washout
for load and drag alleviation. The struc-tures must be flexible
enough to generate sufficientnose-down rotation of each wing
section, but not soflexible that the membrane areas of the wing
will inflateand camber, increasing the forces. The wing structure
inthe center of Fig. 6 (with Xo = 0.5) strikes the best com-promise
between the two deformations, and providesthe lowest drag. When Xo
= 1, the structure is too stiff,relying upon a membrane hinge
between the carbonfiber wing and root. When Xo = 0.1, the optimizer
isunable to fill in enough space with laminates to preventmembrane
inflation. Of the three designs, this is theleast tractable from a
manufacturing point of view aswell.
The dependency of the optimal topology (maximumlift) upon both
angle of attack and airfoil shape aregiven in Fig. 7, for both a
reflex (left two plots) anda cambered wing (right two plots). For
the wing withtrailing edge reflex, the optimal lift design looks
similarto that found in Fig. 4: trailing edge battens that extendno
farther up the wing than the half-chord, a spanwisemember that
coincides with the inflection point of theairfoil, and
unconstrained membrane skin towards the
leading edge, where the forces are largest. The opti-mizer has
realized that it can maximize lift by bothcambering the wing
through inflation at the leadingedge, and forcing the trailing edge
battens downwardfor wash-in.
This latter deformation is only possible due to thereflex
(negative camber) in this area, included to offsetthe nose-down
pitching moment of the remainder ofthe flying wing, and thus allow
for removal of ahorizontal stabilizer due to size restrictions.
Increasingthe angle of attack from 3 to 12 shows no
significantdifference in the wing topology, slightly increasing
thelength of the largest batten. At the lower angle ofattack, up to
22% increase in lift is indicated throughtopology optimization.
For the cambered wing (singly-curved airfoil, righttwo plots of
Fig. 7), the lift over the rigid wing is, asexpected, much larger
than found in the reflex wings,but adequate stability becomes
critical. With the re-moval of the negatively-cambered portion of
the airfoil,most of the forces generated over this wing will
bepositive, and the topology optimizer can no longer gainadditional
lift via wash-in. Imbedding batten structuresin the trailing edge
will now result in washout, surelydecreasing the lift. As such, the
optimizer producesa trailing edge member that outlines the
planformand connects to the root (similar to the
perimeter-reinforced wing designs), restraining the motion of
thetrailing edge and inducing an aerodynamic twist.
Fig. 7 Affect of angle of attack and airfoil upon the optimal CL
topology
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 311
Unlike the PR wing, this trailing edge reinforcementdoes not
extend continuously from the root to the tip,instead ending at 65%
of the semi-span. This is thenfollowed by a trailing edge batten
that extends into themembrane skin, similar to the designs seen for
the re-flex wing in Fig. 7. Why such a configuration should
bepreferred over the PR wing design for lift enhancementwill be
discussed below. As before, increasing the angleof attack has
little bearing on the optimal topology,again increasing the size of
the trailing edge batten. Apotential increase in lift by 15% over
the rigid wing isindicated at the lower angle of attack.
Similar results are given in Fig. 8, with L/D max-imization as
the topology design metric. Presumablydue to the conflictive nature
of the ratio, the wingtopology that maximizes L/D is a strong
function ofangle of attack. For the reflex wing at lower angles,
theoptimal design resembles topologies used above for
liftenhancement (Fig. 7), while at 12 the design is closer
intopology to one with minimum drag (Fig. 6). Increasinglift is
more important to L/D at lower angles, whiledecreasing drag becomes
key at larger angles. Thedrag is very small at low angles of attack
(technicallyzero for this inviscid formulation, if not for the
inclu-sion of a constant CDo), and insensitive to changes
viaaeroelasticity.
This concept is less true for the cambered wing (righttwo plots
of Fig. 8), where designs at both 3 and 12angle of attack utilize a
structure with trailing edgeadaptive washout. At the lower angle,
the topology op-timizer leaves a large triangular structure at the
trailingedge (connected to neither the root nor the wing tip),and
the leading edge is filled in with carbon fiber. Atthe higher angle
of attack, four batten-like structuresare placed within the
membrane skin, oriented parallelto the flow, one of which connects
to the wing tip. Po-tential improvements are generally smaller than
thoseseen above, though a 10% increase in L/D is availablefor the
cambered wing at 12.
Wing displacements and pressure distributions aregiven for
select wing designs in Fig. 9, for a reflex wingat 12 angle of
attack. Corresponding data along thespanwise section 2y/b = 0.58 is
given in Fig. 10. Asthe wing is modeled with no thickness in the
vortexlattice method, distinct upper and lower pressure
distri-butions are not available, only differential terms.
Fivetopologies are discussed, beginning with a pure carbonfiber
wing. Lift-augmentation designs are representedby a baseline PR
wing and the topology optimized formaximum lift. Lift-alleviation
designs are representedby a baseline BR wing and the topology
optimized forminimum lift slope.
The differential pressure distribution over the mono-lithic
carbon fiber wing is defined by leading edgesuction due to flow
stagnation, pressure recovery (andpeak lift) over the maximum
camber, and negativeforces over the reflex portion of the wing. As
ex-pected, the inviscid solver misses the low-pressure cellsat the
wingtip (from the vortex swirling system), andthe plateau in the
pressure distribution, indicative ofa separation bubble. This
aerodynamic loading causesa moderate wash-in of the carbon fiber
wing (0.1),resulting in a computed lift coefficient of 0.604.
Computed deformation of the PR wing is muchlarger than the
carbon fiber wing, though the deforma-tions are within the range of
validity of a linear finiteelement solver. The sudden changes in
wing geometryat the membrane/carbon fiber interfaces lead to
sharpdownward forces at the leading and trailing edges, thelatter
of which exacerbates the effect of the airfoilreflex. Despite this,
the membrane inflation increasesthe camber of the wing and thus the
lift, by 6.5% overthe carbon fiber wing.
Several disparate deformation mechanisms con-tribute to the high
lift of the MAV design located by theaeroelastic topology optimizer
(middle column, Fig. 9).First, the membrane inflation towards the
leading edgeincreases lift via cambering, similar to the PR wing
(the
Fig. 8 Affect of angle of attack and airfoil upon the optimal
L/D topology
-
312 B. Stanford, P. Ifju
Fig. 9 Normalized out-of-plane displacements (top) and
differential pressure coefficients (bottom) for baseline and
optimal topologydesigns, = 12, reflex wing
pressure distributions over the two wing structures areidentical
through x/c = 0.25). The main trailing edgebatten structure is then
depressed downward along thetrailing edge (due to the reflex) for
wash-in, increasingthe local angle of attack of each flexible wing
section,and thus the lift. It can also be seen (from the left
sideof Fig. 10 in particular) that the local bending/twistingof
this batten structure is minimal: the deformationalong this
structure is largely linear down the wing. Theintersection of this
linear trend with the curved inflatedmembrane shape produces a cusp
in the airfoil. The
small radius of curvature forces very large velocities,resulting
in the lift spike at 46% of the chord.
This combination of wash-in and cambering leads toa design which
out-performs the lift of the PR wing by5.6%, but the former effect
is troubling. The wash-inessentially removes the reflex from the
airfoil (as doesthe aerodynamic twist of the PR wing), an
attributeoriginally added to mitigate the nose-down pitchingmoment.
This fact leads to two important ideas. First,thorough optimization
of a single design metric is ill-advised for micro air vehicle
design, as other aspects of
Fig. 10 Deformations andpressures along 2y/b = 0.58for baseline
and optimaltopology designs, = 12,reflex wing
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 313
the flight performance will surely degrade. Its inclusionhere is
only meant to emphasize the relationship be-tween aeroelastic
deformation and flight performance,and show the capabilities of the
topology optimiza-tion. Secondly, if the design goal is a
single-mindedmaximization of lift, a reflex airfoil is a poor
choicecompared to a singly-curved airfoil, a shape which
thetopology optimizer strives to emulate through aeroelas-tic
deformations.
Referring now to the load-alleviating MAV wingstructures of
Figs. 9 and 10, the deformation of theBR wing is relatively small,
allowing for just 0.1 ofadaptive washout. The BR wing is very
sensitive topre-tensions in the span direction; the structure is
toostiff. Furthermore, the reflex in the wing pushes thetrailing
edge down, limiting the ability of the battens towashout for load
reduction. Less than a 2% drop in liftfrom the carbon fiber wing is
obtained, and the pressuredistributions of the two wings in Fig. 10
are very similar.
The load alleviating design located by the topologyoptimizer
(right column, Fig. 9) is significantly moresuccessful. By filling
the design space with patches ofdisconnected carbon fiber
structures (dominated by along batten which extends the length of
the mem-brane skin, but is not connected to the wings leadingedge),
the MAV wing is very flexible, but none of themembrane portions of
the wing are large enough tocamber the wing via inflation. Wing
deformation is the
same magnitude as that seen in the PR-type wings, butthe motion
is located at the trailing edge for adaptivewashout, and lift is
decreased by 5%. The local defor-mation within the membrane between
the leading edgeand the long batten structure is substantial, and
the flowdeceleration over this point sees a further loss in lift,
aswith the PR wing.
Similar results are given in Figs. 11 and 12, for acambered wing
at 12 angle of attack. The three base-line wings are again shown
(carbon fiber wing, PR, andBR), as well as the designs located by
the topologyoptimization to maximize lift and minimize lift
slope.As the forces are generally larger for the camberedairfoil,
the deformations have increased to 5% of theroot chord. The
negative forces at the trailing edgeof the airfoil are likewise
absent. As before, the PRmembrane wing effectively increases the
lift over itscarbon fiber counterpart through adaptive
cambering,along with aerodynamic penalties from the shape
dis-continuities at the leading and trailing edge of themembrane
skin.
There is an appreciable amount of upward defor-mation of the PR
wings trailing edge carbon fiberstrip, leading to washout of each
flexible wing section,degrading the lift. As such, the aeroelastic
topologyoptimizer can maximize lift (Fig. 11, middle column)
byadding more material to this strip and negating the mo-tion of
the trailing edge. As discussed above, this strip
Fig. 11 Normalized out-of-plane displacements (top) and
differential pressure coefficients (bottom) for baseline and
optimal topologydesigns, = 12, cambered wing
-
314 B. Stanford, P. Ifju
Fig. 12 Deformations andpressures along 2y/b = 0.58for baseline
and optimaltopology designs, = 12,cambered wing
does not continue unbroken to the wing tip, but ends at65% of
the semispan. The remaining membrane trailingedge is filled with a
free-floating carbon fiber batten.Such a configuration can
(theoretically) improve the liftin several ways, similar to the
trailing edge structureused for lift optimization in Fig. 9.
Placing a flexible membrane skin between two rigidsupports
produces a trade-off: the cambering via in-flation increases lift,
but this metric is degraded bythe sharp discontinuities in the
airfoil shape. Towardsthe inner portion of the MAV wing, this
trade-off isfavorable for lift. Towards the wingtip however
(eitherdue to the changes in chord or in pressure) this is nolonger
true: the total lift can be increased by allowingthis portion of
the trailing edge to washout, therebyavoiding the negative
pressures seen elsewhere alongthe trailing edge.
The forward portion of this batten structure alsoproduces a cusp
in the wing geometry, forcing a verystrong low pressure spike over
the upper portion ofthe airfoil to increase the lift, as before.
The inviscidsolver probably over-predicts the strength of this
spike:the presence of viscosity will attenuate the speed of
theflow, and thus both the magnitude of the low pressurespike and
its beneficial effect upon lift. The aeroelastictopology optimizer
predicts a 3.5% increase in lift overthe PR wing, and 12.5%
increase over the carbon fiberwing, though the veracity of these
comparisons requiresa viscous solver to ascertain the actual height
of thelow-pressure spike at x/c = 0.68.
The batten-reinforced design of Fig. 11 is substan-tially more
effective with the cambered wing, largelydue to the positive forces
at the trailing edge (ratherthan the negative forces seen over the
reflex wing). The
Fig. 13 Experimentally measured forces and moments for baseline
and optimal topology designs, reflex wing
-
Aeroelastic topology optimization of membrane structures for
micro air vehicles 315
1.6 of washout in the cambered BR wing decreasesthe load
throughout most of the wing and decreasesthe lift by 8.5% (compared
to the carbon fiber wing),but, as before, the load-alleviating
design located bythe topology optimizer (right column, Fig. 11) is
su-perior. Similar to above, the design utilizes a series
ofdisconnected carbon fiber structures, oriented parallelto the
flow, and extending to the trailing edge. Thediscontinuous wing
surface forces a number of high-pressure spikes on the upper
surface, notably at x/c =0.2 and 0.6. This, in combination with the
substantialadaptive washout at the trailing edge, decreases the
liftby 13.6% over the carbon fiber wing and by 5.6% overthe BR
wing.
5 Experimental validation
Due to the low-fidelity nature of the aeroelastic
analysisemployed in this work, a certain measure of experimen-tal
validation of the superiority of computed optimaover baseline
designs is required. This is particularlytrue for drag-based
metrics, which, as discussed above,the vortex lattice method with
struggle to accuratelycompute. For this purpose, six designs are
built forexperimental testing: three baseline designs (mono-lithic
carbon fiber wing, PR, and BR wings), and
threetopologically-optimized designs (minimum CL , mini-mum drag,
and minimum Cm , the third, fourth, andfifth wings shown in Fig.
13). The latter three designsare found by optimizing with a reflex
airfoil, at 3 angleof attack. All testing is conducted in a
closed-loopwind tunnel, and loads are measured with a strain
gagesting balance through an entire -sweep; more detailspertaining
to the experimental testing can be found byStanford et al.
(2007a).
Experimental results are given in Fig. 13, in termsof CL, CD,
and Cm of the three baseline designs andthe relevant optimal
design. All three structures locatedby the topology optimizer show
marked improvementsover the baseline experimental data, validating
the useof a low fidelity aeroelastic model as a surrogate
forcomputationally-intensive nonlinear models. With theexception of
very low (where deformations are small)and very high angles of
attack (where the wing hasstalled), the optimized designs
consistently out-performthe baselines. The minimum CL design has a
shallowerlift slope than the BR wing, and a flatter stalling
curve(left of Fig. 13). The minimum drag design
similarlyout-performs the BR wing (middle of Fig. 13). Theminimum
Cm design has a steeper pitching momentslope than the PR wing
(right of Fig. 13), indicative of alonger static stability
margin.
6 Conclusions
Aeroelastic topology optimization has been used to de-sign the
laminate reinforcement of a membrane microair vehicle wing, with a
two-material formulation ofthe wetted surface. The static
aeroelasticity is modeledwith a vortex lattice method coupled to
linear mem-brane and shell elements. The sensitivity of the
wingsaerodynamic performance to each element density iscomputed
with an adjoint analytical sensitivity analysis.The following
conclusions can be drawn:
1. Nonlinear power-law interpolation between 0(membrane) and 1
(carbon fiber) ensures a smoothaeroelastic response.
2. An explicit penalty based upon the sine functionadequately
pushes the design to a 01 distributionwithout significantly
altering topology.
3. The optimal solution is very dependent upon theinitial
topology, requiring multiple runs for eachcase.
4. Optimal lift- and drag-based metrics are insensitiveto flight
condition, though L/D is not.
5. The optimizer makes use of several disparate phe-nomena for
lift augmentation: membrane inflationto camber the wing, depression
of the trailing edgefor wash-in, and sharp cusps in surface
geometrythat cause the pressure to locally spike.
6. Optimal load-alleviation is obtained with a seriesof
disjointed laminate structures: the wing is flexi-ble enough to
substantially washout at the trailingedge, but the remaining
membrane patches arentlarge enough to locally inflate, which would
addcamber and increase the lift.
7. Relevant improvements in aerodynamic perfor-mance can be
obtained despite the low-fidelityaeroelastic model employed, as
indicated by exper-imental testing.
This work has clearly demonstrated the feasibility ofaeroelastic
topology optimization for membrane wings,but future work would need
to concentrate on severalareas. First, multi-objective analysis is
required to lo-cate designs with adequate performance along a
widerange of flight conditions. Secondly, it is hypothesizedhere
that minimizing the lift slope will help with gustalleviation as
well, but the veracity of this claim needsto be tested with
unsteady aeroelastic models and non-homogenous incoming flow.
Finally, agility-based met-rics should be considered as well: a MAV
wing in alateral roll maneuver, for example.
-
316 B. Stanford, P. Ifju
Acknowledgements This work was jointly supported by the AirForce
Research Laboratory and the Air Force Office of ScientificResearch
under the MURI program F49620-03-1-0381.
References
Albertani R, Stanford B, Hubner J, Ifju P (2007)
Aerodynamiccoefficients and deformation measurements on flexible
mi-cro air vehicle wings. Exp Mech 47(5):625635
Anagnostou G, Rnquist E, Patera A (1992) A
computationalprocedure for part design. Comput Methods Appl Mech
Eng97(1):3348
Balabanov V, Haftka R (1996) Topology optimization of trans-port
wing internal structure. J Aircr 33(1):232233
Beckers M (1999) Topology optimization using a dual methodwith
discrete variables. Struct Multidisc Optim 17(1):1424
Bendse M, Sigmund O (2003) Topology optimization.
Springer,Berlin, Germany
Bendse M, Lund E, Olhoff N, Sigmund O (2005)
Topologyoptimization: broadening the areas of application.
ControlCybern 34(1):735
Borrvall T, Petersson J (2003) Topology optimization of fluids
instokes flow. Int J Numer Methods Fluids 41(1):77107
Chen T, Wu S (2008) Multiobjective optimal topology design
ofstructures. Comput Mech 21(6):483492
Cook R, Malkus D, Plesha M, Witt R (2002) Concepts and
appli-cations of finite element analysis. Wiley, New York, NY
Deb K, Goel T (2001) A hybrid multi-objective
evolutionaryapproach to engineering shape design. In:
Internationalconference on evolutionary multi-criterion
optimization,79 March, Zurich, Switzerland
Eschenauer H, Olhoff N (2001) Topology optimization of
contin-uum structures: a review. Appl Mech Rev 54(4):331390
Gersborg-Hansen A, Sigmund O, Haber R (2005)
Topologyoptimization of channel flow problems. Struct
MultidiscOptim 30(3):181192
Gomes A, Suleman A (2008) Topology optimization of a re-inforced
wing box for enhanced roll maneuvers. AIAA J46(3):548556
Haftka R, Grdal Z (1992) Elements of structural
optimization.Kluwer, Dordrecht, The Netherlands
Hsu M, Hsu Y (2005) Interpreting three-dimensional
structuraltopology optimization results. Comput Struct
83(4):327337
Katz J, Plotkin A (2001) Low-speed aerodynamics.
CambridgeUniversity Press, Cambridge, UK
Krog L, Tucker A, Kemp M (2004) Topology optimizationof aircraft
wing box ribs. In: AIAA/ISSMO multidisci-plinary analysis and
optimization conference, 30 August1 September, Albany, NY
Lee S, Bae J, Hinton E (2000) Shell topology optimization
usingthe layered artificial material model. Int J Numer MethodsEng
47(4):843867
Luo Z, Yang J, Chen L (2006) A new procedure for aero-dynamic
missile designs using topological optimizationapproach of continuum
structures. Aerosp Sci Technol10(5):364373
Lyu N, Saitou K (2005) Topology optimization of multicompo-nent
beam structure via decomposition-based assembly syn-thesis. J Mech
Des 127(2):170183
Martins J, Alonso J, Reuther J (2001) Aero-structural wing
de-sign optimization using high-fidelity sensitivity analysis.
In:Confederation of European aerospace societies conferenceon
multidisciplinary analysis and optimization, 2526 June,Cologne,
Germany
Maute K, Allen M (2004) Conceptual design of
aeroelasticstructures by topology optimization. Struct Multidisc
Optim27(1):2742
Maute K, Reich G (2006) Integrated multidisciplinary topol-ogy
optimization approach to adaptive wing design. J
Aircr43(1):253263
Maute K, Nikbay M, Farhat C (2002) Sensitivity analysis and
de-sign optimization of three-dimensional non-linear aeroelas-tic
systems by the adjoint method. Int J Numer Methods
Eng56(6):911933
Ormiston R (1971) Theoretical and experimental aerodynamicsof
the sail wing. J Aircr 8(2):7784
Pingen G, Evgrafov A, Maute K (2007) Topology optimizationof
flow domains using the Lattice Boltzmann method. StructMultidisc
Optim 34(6):507524
Stanford B, Abdulrahim M, Lind R, Ifju P (2007a) Investigationof
membrane actuation for roll control of a micro air vehicle.J Aircr
44(3):741749
Stanford B, Sytsma M, Albertani R, Viieru D, Shyy W, IfjuP
(2007b) Static aeroelastic model validation of membranemicro air
vehicle wings. AIAA J 45(12):28282837
Stegmann J, Lund E (2005a) Nonlinear topology optimizationof
layered shell structures. Struct Multidisc Optim 29(5):349360
Stegmann J, Lund E (2005b) Discrete material optimization
ofgeneral composite shell structures. Int J Numer MethodsEng
62(14):20092027
Stolpe M, Stidsen T (2006) A hierarchical method for dis-crete
structural topology design problems with local stressand
displacement constraints. Int J Numer Methods Eng69(5):10601084
Torres G (2002) Aerodynamics of low aspect ratio wings at
lowReynolds numbers with applications to micro air vehicledesign.
Ph.D. Dissertation, Department of Aerospace andMechanical
Engineering, University of Notre Dame, SouthBend, IN
Wang S, Tai K, Wang M (2006) An enhanced genetic algorithmfor
structural topology optimization. Int J Numer MethodsEng
65(1):1844
Zuo K, Chen L, Zhang Y, Yang J (2007) Study of key algo-rithms
in topology optimization. Int J Adv Manuf Technol32(7):787796
Aeroelastic topology optimization of membrane structures for
micro air vehiclesAbstractIntroductionMembrane micro air vehicle
wingsComputational frameworkMaterial interpolationStatic
aeroelastic analysisAdjoint sensitive analysisOptimization
framework
ResultsExperimental validationConclusionsReferences
/ColorImageDict > /JPEG2000ColorACSImageDict >
/JPEG2000ColorImageDict > /AntiAliasGrayImages false
/CropGrayImages true /GrayImageMinResolution 150
/GrayImageMinResolutionPolicy /Warning /DownsampleGrayImages true
/GrayImageDownsampleType /Bicubic /GrayImageResolution 150
/GrayImageDepth -1 /GrayImageMinDownsampleDepth 2
/GrayImageDownsampleThreshold 1.50000 /EncodeGrayImages true
/GrayImageFilter /DCTEncode /AutoFilterGrayImages true
/GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict >
/GrayImageDict > /JPEG2000GrayACSImageDict >
/JPEG2000GrayImageDict > /AntiAliasMonoImages false
/CropMonoImages true /MonoImageMinResolution 600
/MonoImageMinResolutionPolicy /Warning /DownsampleMonoImages true
/MonoImageDownsampleType /Bicubic /MonoImageResolution 600
/MonoImageDepth -1 /MonoImageDownsampleThreshold 1.50000
/EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode
/MonoImageDict > /AllowPSXObjects false /CheckCompliance [ /None
] /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false
/PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000
0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true
/PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ]
/PDFXOutputIntentProfile (None) /PDFXOutputConditionIdentifier ()
/PDFXOutputCondition () /PDFXRegistryName () /PDFXTrapped
/False
/Description >>> setdistillerparams>
setpagedevice