Embed Size (px)
Citation preview

Algorithm Evaluation
CS5240 Theoretical Foundations in Multimedia
Leow Wee Kheng
Department of Computer ScienceSchool of Computing
National University of Singapore
Leow Wee Kheng (NUS) Algorithm Evaluation 1 / 23
You Have Learned...
You Have Learned...
Main stages in computational problem solving:
1. Problem Formulation
2. Algorithm Development
3. Algorithm Evaluation
4. Looking Back
Now, we look at Stage 3 and Stage 4.Stage 4 is based on Stage 3.
Leow Wee Kheng (NUS) Algorithm Evaluation 2 / 23
Verification and Evaluation
Verification and Evaluation
You are quite familiar with testing:
◮ Collect test data with ground truth.
◮ Run algorithms on test data.
◮ Measure error of test results against ground truth.
Notes:
◮ This is good for measuring accuracy or error.
◮ Need to implement the algorithms.
◮ Need test data with ground truth.
Question: Can you do something before implementing algorithm?
Leow Wee Kheng (NUS) Algorithm Evaluation 3 / 23
Verification and Evaluation
Before implementing an algorithm, we can⊙
Verify Correctness:◮ Correctness: Does algorithm solve the defined problem correctly?◮ Optimality: Is algorithm optimal, as defined by the problem?
⊙
Evaluate Characteristics:◮ Complexity: What are its space and time complexities?◮ Convergence: Can the algorithm converge?◮ Robustness: Is algorithm robust against outliers?
After implementing an algorithm, we can⊙
Evaluate Performance:◮ Accuracy: How accurate is the algorithm?◮ Desirability: Is algorithm producing desired results?◮ Efficiency: How fast does the algorithm runs?◮ Convergence: Does the algorithm converge or fluctuate wildly?◮ Robustness: Is algorithm robust against outliers?
Leow Wee Kheng (NUS) Algorithm Evaluation 4 / 23
Verification and Evaluation
Surprise! A correct and optimal algorithm may not be desirable!
If problem definition is not defined appropriately,algorithm can be correct and optimal as defined in problem definition,but producing undesired results.
Example: Can you name a simple example of the above?
Leow Wee Kheng (NUS) Algorithm Evaluation 5 / 23
Colour Calibration
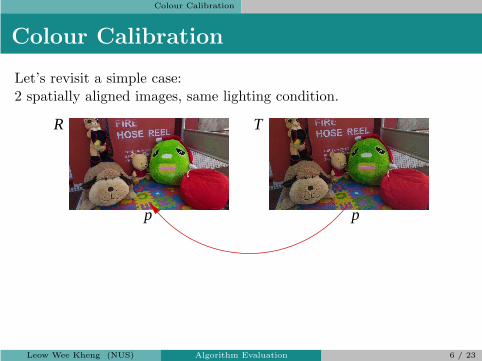
Colour Calibration
Let’s revisit a simple case:2 spatially aligned images, same lighting condition.
R T
p p
Leow Wee Kheng (NUS) Algorithm Evaluation 6 / 23

Colour Calibration
Problem Definition PA3Inputs
◮ Reference image R, colour of point p in R is v∗(p).
◮ Target image T , colour of point p in T is v(p).
◮ T and R are spatially aligned.
◮ T and R are captured under the same lighting condition.
Outputs
◮ Colour mapping function f from T to R.
Constraints
◮ f is a nonlinear function.
◮ For n points pi in T and R, the following colour difference isminimized:
n∑
i=1
‖f(v(pi))− v∗(pi)‖2. (1)
Leow Wee Kheng (NUS) Algorithm Evaluation 7 / 23
Colour Calibration
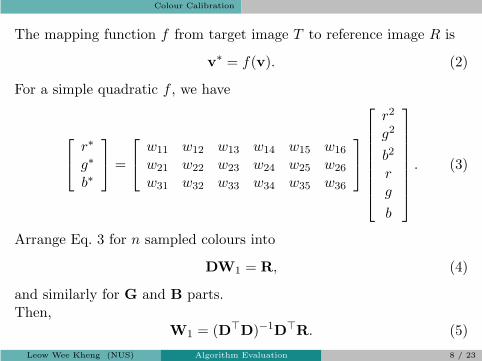
The mapping function f from target image T to reference image R is
v∗ = f(v). (2)
For a simple quadratic f , we have
r∗
g∗
b∗
=
w11 w12 w13 w14 w15 w16
w21 w22 w23 w24 w25 w26
w31 w32 w33 w34 w35 w36
r2
g2
b2
rg
b
. (3)
Arrange Eq. 3 for n sampled colours into
DW1 = R, (4)
and similarly for G and B parts.Then,
W1 = (D⊤D)−1D⊤R. (5)
Leow Wee Kheng (NUS) Algorithm Evaluation 8 / 23

Colour Calibration
Algorithm AA1: Colour Calibration
Input: Reference image R, target image T .Output: Parameters of colour mapping function f .
1 Sample n points pi, i = 1, . . . , n, in T and R; get v(pi), v∗(pi).
2 Use sampled colours to solve for parameters of f (Eq. 5).
Algorithm AA2: Colour Adjustment
Input: Target image T , computed f .Output: Resultant image T ′.
1 for each point p in T , do2 Compute v′(p) of T ′ using Eq. 3, with v∗ replaced by v′.
Leow Wee Kheng (NUS) Algorithm Evaluation 9 / 23
Colour Calibration
Correctness:
◮ Algorithm AA1, with Eq. 5, gives least squares solution of Eq. 1.
Optimality:
◮ Eq. 5 (linear least squares) produces f that optimizes Eq. 1.
◮ But, Algorithm AA2 may not produce accurate results because ...
Convergence:
◮ No convergence issue:Algorithm AA1 is non-iterative.Algorithm AA2 is a simple repeat loop.
Complexity: Algorithm AA1
◮ Step 1: Random sampling, space and time complexities are O(n).
◮ Step 2: What about Eq. 5, linear least squares?
Leow Wee Kheng (NUS) Algorithm Evaluation 10 / 23
Colour Calibration
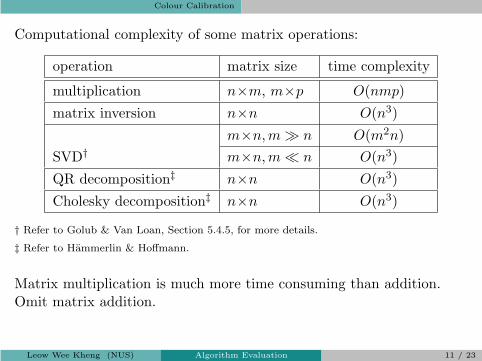
Computational complexity of some matrix operations:
operation matrix size time complexity
multiplication n×m, m×p O(nmp)
matrix inversion n×n O(n3)
m×n,m ≫ n O(m2n)
SVD† m×n,m ≪ n O(n3)
QR decomposition‡ n×n O(n3)
Cholesky decomposition‡ n×n O(n3)
† Refer to Golub & Van Loan, Section 5.4.5, for more details.
‡ Refer to Hammerlin & Hoffmann.
Matrix multiplication is much more time consuming than addition.Omit matrix addition.
Leow Wee Kheng (NUS) Algorithm Evaluation 11 / 23
Colour Calibration
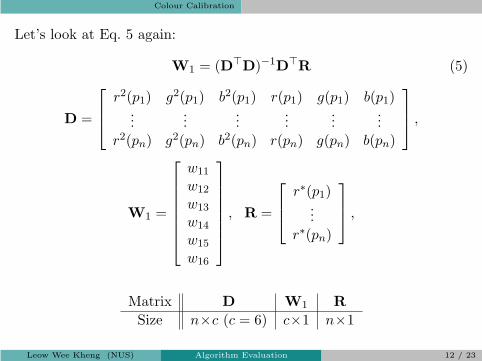
Let’s look at Eq. 5 again:
W1 = (D⊤D)−1D⊤R (5)
D =
r2(p1) g2(p1) b2(p1) r(p1) g(p1) b(p1)...
......
......
...r2(pn) g2(pn) b2(pn) r(pn) g(pn) b(pn)
,
W1 =
w11
w12
w13
w14
w15
w16
, R =
r∗(p1)...
r∗(pn)
,
Matrix D W1 R
Size n×c (c = 6) c×1 n×1
Leow Wee Kheng (NUS) Algorithm Evaluation 12 / 23
Colour Calibration
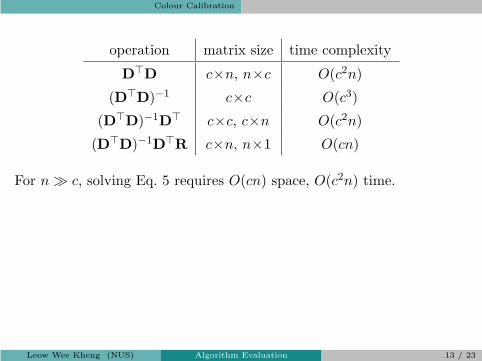
operation matrix size time complexity
D⊤D c×n, n×c O(c2n)
(D⊤D)−1 c×c O(c3)
(D⊤D)−1D⊤ c×c, c×n O(c2n)
(D⊤D)−1D⊤R c×n, n×1 O(cn)
For n ≫ c, solving Eq. 5 requires O(cn) space, O(c2n) time.
Leow Wee Kheng (NUS) Algorithm Evaluation 13 / 23

Colour Calibration
Complexity: Algorithm AA1
◮ Step 1: Random sampling: O(n) space and time complexities.
◮ Step 2: Linear least squares: O(cn) space, O(c2n) time complexity.
◮ Overvall: O(cn) space complexity, O(c2n) time complexity
Complexity: Algorithm AA2
◮ Eq. 3: O(c2) space and time complexities for each pixel.
◮ For m pixels in T , need m iterations.
◮ Overall: O(m) space (for m ≫ c2), O(mc2) time complexity.
Conclusion:
◮ Since c = 6 is small, the algorithms are quite efficient.
⊙
Analysis of Algorithm AB1 is straightforward [Homework].
Leow Wee Kheng (NUS) Algorithm Evaluation 14 / 23
Skull Reconstruction
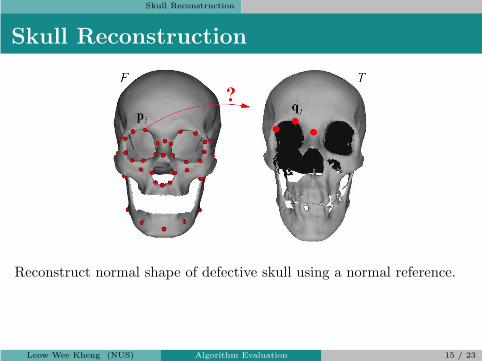
Skull Reconstruction
Reconstruct normal shape of defective skull using a normal reference.
Leow Wee Kheng (NUS) Algorithm Evaluation 15 / 23

Skull Reconstruction
Problem Definition PC2
⊙
Inputs:
◮ Reference model F , mesh points pi.
◮ Target model T with defective parts removed, mesh points qj .
⊙
Outputs:
◮ Point correspondence function c : R → T ∪ {∅},where ∅ denotes nothing.
◮ Shape change function f from pi to p′i.
◮ Resultant model R, mesh points f(pi).
Leow Wee Kheng (NUS) Algorithm Evaluation 16 / 23

Skull Reconstruction
⊙
Constraints:
◮ Close matching to T : main constraint, objective function
minimize∑
i,c(pi) 6=∅
‖f(pi)− c(pi)‖2.
◮ Minimize amount of no correspondence:
minimize |{i : c(pi) = ∅}|.
◮ R is normal:
minimize∑
i
‖f(pi)− pi‖2.
Leow Wee Kheng (NUS) Algorithm Evaluation 17 / 23
Skull Reconstruction
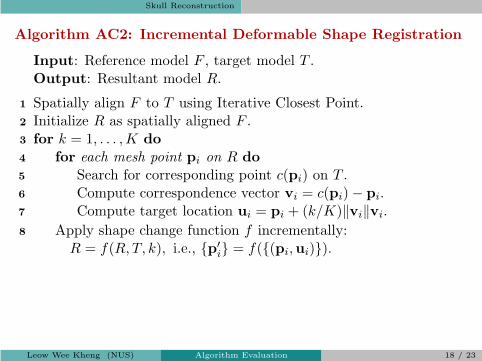
Algorithm AC2: Incremental Deformable Shape Registration
Input: Reference model F , target model T .Output: Resultant model R.
1 Spatially align F to T using Iterative Closest Point.2 Initialize R as spatially aligned F .3 for k = 1, . . . ,K do4 for each mesh point pi on R do5 Search for corresponding point c(pi) on T .6 Compute correspondence vector vi = c(pi)− pi.7 Compute target location ui = pi + (k/K)‖vi‖vi.
8 Apply shape change function f incrementally:R = f(R, T, k), i.e., {p′
i} = f({(pi,ui)}).
Leow Wee Kheng (NUS) Algorithm Evaluation 18 / 23
Skull Reconstruction
Correctness / Optimality:
◮ Similar to ICP, iterative shape change should satisfy Constraint 1.
◮ Satisfaction of Constraint 2 depends on correspondence search(Step 5).
◮ Constraint 3 is satisfied if shape change (Step 8) is not too drastic.
Convergence:
◮ ICP can converge [1].
◮ Steps 7 & 8 moves R closer and closer to T . Should converge.
Leow Wee Kheng (NUS) Algorithm Evaluation 19 / 23
Skull Reconstruction
Complexity:
◮ Step 1: Complexity of ICP [Homework].
◮ Step 5: Searching in a neighbourhood of m points is about O(m).
◮ Step 8: Depends on complexity of shape change algorithm.Example: For Laplacian deformation, most time-consuming part is
(A⊤2 A2)
−1A⊤2 A1d.
Matrix A1 A2 d
Size 3n×3m, n > m 3n×3(n−m) 3m×1
Overvall: O(n2) space complexity, O(n3) time complexity.
◮ With K iterations, total time complexity is O(Kn3).
Leow Wee Kheng (NUS) Algorithm Evaluation 20 / 23

Look Back
Look Back
Look back at your problem definition and algorithms:
◮ Is there another way to solve the problem?
◮ Can you improve the problem definition and/or algorithm?
Algorithm AA1
◮ Which kind of nonlinear function gives best accuracy?
Algorithm AC2
◮ Is TSP or Laplacian deformation more appropriate?
◮ How to better ensure satisfaction of Constraints 2 & 3?
Leow Wee Kheng (NUS) Algorithm Evaluation 21 / 23

Summary
Summary
After developing an algorithm (before implementation), always
◮ Verify correctness, optimality of algorithm with problem definition.
◮ Evaluate convergence and complexity of algorithm.
Need to understand problem definition and algorithm well!
After implementing (programming) an algorithm, always
◮ Evaluate desirability of test results.
◮ Evaluate accuracy of algorithm against ground truth data.
◮ Evaluate efficiency, convergence, robustness of algorithm.
Look back
◮ Is there another way to solve the problem?
◮ Can you improve the problem definition and/or algorithm?
Leow Wee Kheng (NUS) Algorithm Evaluation 22 / 23
References
References
1. P. J. Besl and N. D. McKay. A method for registration of 3-D shapes.IEEE Trans. on Pattern Analysis and Machine Intelligence, 14(2),239–256, 1992.
Leow Wee Kheng (NUS) Algorithm Evaluation 23 / 23





























