Embed Size (px)
Citation preview

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Algorithms and Model Spaces for Model-RobustExperiment Design
Byran Smucker
Miami University, Oxford, OH
June 14, 2012IMS/ASA Spring Research Conference, Harvard
1 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Outline
1 Introduction
2 Work in JQT
3 Extensions and Ongoing Work
4 Preliminary Results from Ongoing Work
2 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Optimal Design
For standard least squares regression:
Cov(β̂) = σ2(X′X)−1.
Goal: Make (X′X)−1 small in some way. Examples:
Minimize |(X′X)−1| – D-optimality.
Minimize tr(X′X)−1 – A-optimality.
Minimize largest eigenvalue of (X′X)−1 – E-optimality.
3 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Why Use Optimal Design?
Estimates can be made precisely
Parameter estimates;
Predictions;
The design can be tailored to the experimental scenario at hand.
Constrained design space
Mixture of continuous and categorical factors
Sample size constraints
4 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
A Drawback
The form of the model between response and factors must bespecified before design is constructed.
5 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
D-optimal vs. Model-robust
Instead of focusing on a single model (optimal design), find designthat is “good” for all models of interest, if possible.
D-optimal design, starting with arbitrary n-run design ξn:
ξnf→ X(ξn, f )
X′X−→ M(ξn, f )→ ξ∗n = argmax
ξn
|M(ξn, f )|
—–
Model-robust design with respect to a set of modelsF = (f1, f2, . . . , fr ):
ξnF→ {X1,X2, . . . ,Xr} → {M1,M2, . . . ,Mr} → ξ∗n = argmax
ξn
g [|M1|, |M2|, . . . , |Mr |]
6 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
D-optimal vs. Model-robust
Instead of focusing on a single model (optimal design), find designthat is “good” for all models of interest, if possible.
D-optimal design, starting with arbitrary n-run design ξn:
ξnf→ X(ξn, f )
X′X−→ M(ξn, f )→ ξ∗n = argmax
ξn
|M(ξn, f )|
—–
Model-robust design with respect to a set of modelsF = (f1, f2, . . . , fr ):
ξnF→ {X1,X2, . . . ,Xr} → {M1,M2, . . . ,Mr} → ξ∗n = argmax
ξn
g [|M1|, |M2|, . . . , |Mr |]
7 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
D-optimal vs. Model-robust
Instead of focusing on a single model (optimal design), find designthat is “good” for all models of interest, if possible.
D-optimal design, starting with arbitrary n-run design ξn:
ξnf→ X(ξn, f )
X′X−→ M(ξn, f )→ ξ∗n = argmax
ξn
|M(ξn, f )|
—–
Model-robust design with respect to a set of modelsF = (f1, f2, . . . , fr ):
ξnF→ {X1,X2, . . . ,Xr} → {M1,M2, . . . ,Mr} → ξ∗n = argmax
ξn
g [|M1|, |M2|, . . . , |Mr |]
8 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Three Questions with the Set-of-Models Approach
1 What is the set of models, F?
2 What is the function, g?
3 What methods can be used to find the design?
9 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Other Work
Set-of-Models Approach (not an exhaustive review)
Lauter (1974), Cook and Nachtsheim (1982), Dette (1990),Dette and Franke (2001) [continuous designs];
DuMouchel and Jones (1994); Jones et al. (2008); Jones andNachtsheim (2011) [Bayesian approach which implicitlyconsiders 2 models];
Li and Nachtsheim (2000), Loeppky et al. (2007), Jones et al.(2009), Smucker et al. (2012) [two-level designs]
Heredia-Langner et al. (2004) [genetic algorithm];
Tsai and Gilmour (2010) [approximation of As optimality]
10 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Outline
1 Introduction
2 Work in JQT
3 Extensions and Ongoing Work
4 Preliminary Results from Ongoing Work
11 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
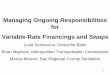
Smucker, del Castillo, and Rosenberger (JQT, 2011)
Figure: Smucker et al. (2011), JQT
12 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
For JQT, Answer to Question 1
Q. What is the set of models, F?A. There were several.
1 A small set of models consisting of maximal models inspecified classes.
e.g. F = {f ′i (x), 1 ≤ i ≤ 3, x ∈ χ} where
f′
1(x) = (1, x1, x2)
f′
2(x) = (1, x1, x2, x1x2)
f′
3(x) = (1, x1, x2, x1x2, x21 , x
22 )
2 All possible submodels of the quadratic model.
3 All possible submodels of the quadratic model that respectstrong effect heredity.
13 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
For JQT, Answer to Question 2
Q. What is the function, g?A. Something that boiled down to
g(MF ) =∏F|Mf | (1)
This was motivated by a connection to multiresponse D-optimaldesign: Under certain assumptions, (1) is the D-criterion for amultiresponse experiment with responses corresponding to themodel in F .
14 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
For JQT, Answer to Question 3
Q. What method was used to find the design?A. A modified Fedorov exchange algorithm.
Proceeds run by run through a design and examines the effectof swapping out a run for one in a candidate list.
As design problems get larger, candidate list gets too large.
Coordinate exchange algorithm (Meyer and Nachtsheim 1995)solves this problem, but no published, effective algorithms formixture designs.
JMP has implemented a method to do this, I believe inventedby Chris Gotwalt and Laura Lancaster.
15 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Mixture Experiment Example
Experiment reported by Frisbee and McGinity (1994).
Response: Glass transition temperature of a certain film.
Factors: A mixture of three nonionic surfactant factors.
Goal: Minimize the transition temperature.
Possible models:
f′1(x) = ({xi , i = 1, 2, 3}) (2)
f′2(x) = (f
′1, {xixj , i < j ≤ 3}) (3)
f′3(x) = (f
′2, {x1x2x3}) (4)
f′4(x) = (f
′1, {min(xi , xj), i < j ≤ 3}) (5)
f′5(x) = (f
′4, {min(x1, x2, x3)}) (6)
so that F = {f ′i (x), 1 ≤ i ≤ 5, x ∈ χ}.16 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Result: Mixture Experiment with Disparate Models
What models were actually good fits for the data produced by thisexperiment?
f′fm(x) = (x1, x2, x3, x1x3, x2x3) (7)
f′rc(x) = (x1, x2, x3,min(x1, x3),min(x2, x3)) (8)
ModelDesign (2) (3) (4) (5) (6) (7) (8)Model Det. 19.81 5.91e-3 5.36e-6 0.569 2.78e-2 6.61e-2 1.46Robust Ef .745 .954 1 1 1 .812 .866Frisbee and Det. 8.25 1.22e-3 1.51e-6 .146 8.82e-3 2.30e-2 .588McGinity Ef .556 .733 .835 .797 .849 .658 .722Optimal (foreach model)
Det. 48 7.8e-3 5.36e-6 .569 2.73e-2 .188 3
Table: Objective Function Values and D-efficiencies for Example 4,n = 11, protecting against 5 Models.
17 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Result: Mixture Experiment with Disparate Models
What models were actually good fits for the data produced by thisexperiment?
f′fm(x) = (x1, x2, x3, x1x3, x2x3) (7)
f′rc(x) = (x1, x2, x3,min(x1, x3),min(x2, x3)) (8)
ModelDesign (2) (3) (4) (5) (6) (7) (8)Model Det. 19.81 5.91e-3 5.36e-6 0.569 2.78e-2 6.61e-2 1.46Robust Ef .745 .954 1 1 1 .812 .866Frisbee and Det. 8.25 1.22e-3 1.51e-6 .146 8.82e-3 2.30e-2 .588McGinity Ef .556 .733 .835 .797 .849 .658 .722Optimal (foreach model)
Det. 48 7.8e-3 5.36e-6 .569 2.73e-2 .188 3
Table: Objective Function Values and D-efficiencies for Example 4,n = 11, protecting against 5 Models.
18 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
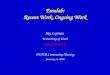
Designs
Figure: On the left, Frisbee and McGinity’s design; on the right, themodel-robust design
19 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Larger Model Spaces
Typical scenario: The fitted model is not one of a few maximalmodels that we designed for.
So, pick a maximal models;
Design for the set of all possible submodels.
Issues:
May need to respect effect heredity.May result in model sets that are too large.
20 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Three-Factor (non-mixture) Example
Design Mean StDev Min
3-MR 0.864 0.060 0.576
511-MR 0.877 0.069 0.705
Quadratic Only 0.872 0.069 0.690
Table: Measurements in terms of D-efficiencies with respect to all 511possible models.
3-MR is design robust for three models:
1 main effects only;2 main effects + two-factor interactions;3 full quadratic model.
511-MR: Design robust for all submodels of the full quadratic model.
21 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Three-Factor Example, Respecting Effect Heredity
Design Mean StDev Min
3-MR 0.907 0.033 0.835
63-MR 0.907 0.034 0.833
Quadratic Only 0.881 0.068 0.740
Table: Measurements in terms of D-efficiencies with respect to all 63models, respecting effect heredity.
3-MR is design robust for three models:
1 main effects only;2 main effects + two-factor interactions;3 full quadratic model.
63-MR: Design robust for all submodels of the full quadratic modelwhich respect strong heredity.
22 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Outline
1 Introduction
2 Work in JQT
3 Extensions and Ongoing Work
4 Preliminary Results from Ongoing Work
23 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Recall the Questions (in reverse order)
3. How to find the design?
2. What is the function, g?
1. What is the set of models, F?
24 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Question 3
Instead of an exchange algorithm that requires a candidate list, Inow use coordinate exchange (Meyer and Nachtsheim 1995).
Considers exchanges coordinate by coordinate.
Faster.
No effective algorithm published that can incorporate mixtureconstraints (JMP can, however).
25 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Question 2
As alternatives to g(MF ) =∏
f ∈F |Mf |, I have used
g1(MF ) =∏
f ∈F |Mf |1/pf
g2(MF ) = minf ∈F (|Mf | /|M∗f |)1/pf .
For what follows, we’ll assume g1.
26 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Question 2
As alternatives to g(MF ) =∏
f ∈F |Mf |, I have used
g1(MF ) =∏
f ∈F |Mf |1/pf
g2(MF ) = minf ∈F (|Mf | /|M∗f |)1/pf .
For what follows, we’ll assume g1.
27 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Question 1
Most realistic and useful model spaces have a major problem:
They are too big.
28 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Question 1
Most realistic and useful model spaces have a major problem:
They are too big.
29 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
The Problem with Model Spaces
k p r (no heredity) r (weak heredity) r (strong heredity)
1 3 3 2 22 6 31 16 123 10 511 184 944 15 16,383 4,048 1,3365 21 1,048,575 175,208 38,618
Table: k is the number of factors; p is the number of parameters; r is thenumber of possible models is r .
30 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Proposed Solution: Approximate Model Spaces
Select a small subset of the full model space.
Find a design robust for the small subset.
Evaluate this design with respect to the full model space.
31 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Outline
1 Introduction
2 Work in JQT
3 Extensions and Ongoing Work
4 Preliminary Results from Ongoing Work
32 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Two-Factor Example: All Possible Models (No EnforcedHeredity)
Model space: All possible submodels of a maximal quadraticmodel.
D-EfficiencyModels Min Mean Time log(SP)MR-1 .743 .861 .008 34.565MR-8 .693 .874 .050 34.991MR-16 .693 .874 .110 34.991MR-31 .693 .874 .199 34.991
33 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Four-Factor Example: All Possible Models (No EnforcedHierarchy)
Model space: All possible submodels of a maximal quadraticmodel.
D-EfficiencyModels Minimum Average Time log(SP)MR-1 .628 .870 .09 40895MR-16 .614 .877 1.02 41026MR-64 .614 .877 4.53 41026MR-128 .614 .877 8.80 41026MR-16383* .632 .873 1159.35 40960* Based on only two algorithm tries.
34 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Work In-Progress
Applying this idea to other model spaces, e.g. model spacesfor two-level designs:
Main effects plus interaction (MEPI) (Li and Nachtsheim2000)Projective (Loeppky et al. 2007)Supersaturated (Jones et al. 2009)
35 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Recap
Began with a basic approach and algorithm that relaxesoptimal design model assumption.
Impractical for large model spaces.
Discussed refinements in terms of
Model-robust criterion;Exchange algorithm;Approach to attacking large model spaces.
36 / 37

IntroductionWork in JQT
Extensions and Ongoing WorkPreliminary Results from Ongoing Work
Acknowledgments
Co-authors/advisors: Enrique del Castillo and JimRosenberger.
Census Bureau for financial support.
37 / 37