Embed Size (px)
Citation preview

AN ABSTRACT OF A THESIS
APPLICATION OF GROEBNER BASES TO
GEOMETRICALLY NONLINEAR ANALYSIS OF
AXISYMMETRIC CIRCULAR ISOTROPIC PLATES
Timothy M. Harrell
Master of Science in Civil Engineering
This thesis demonstrates a new application of Groebner basis by finding an analytical
solution to geometrically nonlinear axisymmetric isotropic circular plates. Because technology is
becoming capable of creating materials that can perform materially in the linear elastic range
while experiencing large deformation geometrically, more accurate models must be used to
ensure the model will result in realistic representations of the structure. As a result, the governing
equations have a highly nonlinear and coupled nature. Many of these nonlinear problems are
solved numerically. Since analytic solutions are unavailable or limited to only a few simplified
cases, their analysis has remained a challenging problem in the engineering community.
On the other hand, with the increasing computing capability in recent years, the
application of Groebner basis can be seen in many areas of mathematics and science. However,
its use in engineering mechanics has not been utilized to its full potential. The focus of this thesis
is to introduce this methodology as a powerful and feasible tool in the analysis of geometrically
nonlinear plate problems to find the closed form solutions for displacement, stress, moment, and
transverse shearing force in the three cases defined in Chapter 4.
The procedure to determine the closed form solutions developed in the current study can
be summarized as follows: 1) the von Kármán plate theory is used to generate nonlinear
governing equations, 2) the method of minimum total potential energy combined with the Ritz
methodology converts the governing equations into a system of nonlinear and coupled algebraic
equations, 3) and Groebner Basis is employed to decouple the algebraic equations to find analytic
solutions in terms of the material and geometric parameters of the plate. Maple 13 is used to
compute the Groebner basis. Some examples of Maple worksheets and ANSYS log files for the
current study are documented in the thesis.
The results of the present analysis indicate that nonlinear effects for the plates subjected
to larger deformation are significant for predicting the deflections and stresses in the plates and
necessary compared to those based on the linear assumptions. The analysis presented in the thesis
further shows the potential of the Groebner basis methodology combined with the methods of
Ritz, Galerkin, and similar approximation methods of weighted residuals which may provide a
useful procedure of analysis to other nonlinear problems and a basis of preliminary design in
engineering practice.


APPLICATION OF GROEBNER BASES TO
GEOMETRICALLY NONLINEAR ANALYSIS OF
AXISYMMETRIC CIRCULAR ISOTROPIC PLATES
______________________
A Thesis
Presented to
the Faculty of the College of Graduate School
Tennessee Technological University
by
Timothy M. Harrell
______________________
In Partial Fulfillment
of the Requirements of the Degree
MASTER OF SCIENCE
Civil Engineering
______________________
August 2014

All rights reserved
INFORMATION TO ALL USERSThe quality of this reproduction is dependent upon the quality of the copy submitted.
In the unlikely event that the author did not send a complete manuscriptand there are missing pages, these will be noted. Also, if material had to be removed,
a note will indicate the deletion.
Microform Edition © ProQuest LLC.All rights reserved. This work is protected against
unauthorized copying under Title 17, United States Code
ProQuest LLC.789 East Eisenhower Parkway
P.O. Box 1346Ann Arbor, MI 48106 - 1346
UMI 1567200
Published by ProQuest LLC (2014). Copyright in the Dissertation held by the Author.
UMI Number: 1567200


iii
DEDICATION
This thesis is dedicated to my late grandfather who kindness and compassion is something I
will always look up to. Also, to my parents and wife who have always shown faith in me.
They inspire me to make myself better.

iv
ACKNOWLEDGEMENTS
I would like to thank Dr. Jane Y. Liu for being my advisor and contributing so much
time and patience during this process. I would also like to thank Dr. John Peddieson and Dr.
Guillermo Ramirez for serving on my committee. I would like to thank the Department of
Civil and Environmental Engineering for funding my graduate degree. Last but not least, I
would like to thank my wife and family for the encouragement throughout my time in
graduate school.

v
TABLE OF CONTENTS
Page
LIST OF TABLES ........................................................................................................................ viii
LIST OF FIGURES ........................................................................................................................ ix
NOMENCLATURE ..................................................................................................................... xiii
CHAPTER 1 - INTRODUCTION ................................................................................................... 1
1.1 Motivation and Overview .......................................................................................................... 1
1.2 Scope of Work ........................................................................................................................... 3
CHAPTER 2 - LITERATURE REVIEW ........................................................................................ 5
2.1 Plates .......................................................................................................................................... 5
2.2 Groebner Basis ........................................................................................................................... 8
CHAPTER 3 - THEORETICAL BACKGROUND ...................................................................... 10
3.1 Review of Thin Plate Theory ................................................................................................... 10
3.1.1 Kirchoff Plate Theory ................................................................................................... 12
3.1.2 Transformation of Coordinate System .......................................................................... 15
3.1.3 Geometrically Nonlinear Plate Theory ......................................................................... 18
3.2 Principle of Minimum Total Potential Energy ......................................................................... 21
3.2.1 Total Potential Energy Functional ................................................................................ 22
3.2.2 The Ritz Method ........................................................................................................... 23
3.3 Groebner Basis ......................................................................................................................... 24
3.3.1 Preliminary Concepts from Abstract Algebra ............................................................... 25
3.3.2 Monomials and Polynomials ......................................................................................... 25

vi
Page
3.3.3 Monomial Ideals and Dickson’s Lemma ...................................................................... 26
3.3.4 Polynomial Ideals and Hilbert’s Basis Theorem ........................................................... 27
3.3.5 Definition of a Groebner Basis ..................................................................................... 28
3.3.6 Affine Variety: the link between the Groebner bases and the original generating set
functions ................................................................................................................................. 29
CHAPTER 4 - IMPLEMENTATION AND METHOD VALIDATION ...................................... 32
4.1 Case Studies ............................................................................................................................. 32
4.1.1 Case 1: Fully Clamped Circular Plate ........................................................................... 32
4.1.2 Case 2: Simply Supported Immovable Circular Plate ................................................... 33
4.1.3 Case 3: Simply Supported Immovable Circular Plate with Overhang .......................... 34
4.2 Shape Functions ....................................................................................................................... 36
4.3 Trial Functions for Ritz Method .............................................................................................. 37
4.4 Computer implementation ....................................................................................................... 39
4.4.1 Maple 13 ....................................................................................................................... 40
4.4.2 ANSYS 13 .................................................................................................................... 41
4.5 Validation of Current Study ..................................................................................................... 45
4.5.1 Validation of Shape Functions ...................................................................................... 45
4.5.2 Validation with Load .................................................................................................... 52
4.5.3 Current Study Solution versus Two Coefficient Ritz Solution ..................................... 55
CHAPTER 5 - RESULTS AND DISCUSSION ............................................................................ 58
5.1 Results for Fully Clamped Circular Plate (Case 1) .................................................................. 58

vii
Page
5.2 Results for Simply Supported Immovable Edge Circular Plate (Case 2) ................................ 67
5.3 Results for Simply Supported Immovable Edge Circular Plate with Overhang (Case 3) ........ 76
CHAPTER 6 - CONCULSION ..................................................................................................... 87
REFERENCES .............................................................................................................................. 89
APPENDICES ............................................................................................................................... 96
APPENDIX A - DEFINITIONS OF SOME PRELIMINARY CONCEPTS ........................ 97
APPENDIX B - EXAMPLES OF AFFINE VARIETIES ................................................... 102
APPENDIX C - COMPARISION OF EXACT LINEAR SOLUTION FROM THE
LINEAR THEORY TO THE SOLUTION FOUND FROM THE RITZ METHOD FOR
THE CIRCULAR PLATE WITH OVERHANG (CASE 3) ............................................... 108
APPENDIX D - MAPLE FILE WITH CURRENT STUDY SOLUTION FOR
GEOMETRICALLY NONLINEAR CIRCULAR PLATE WITH FIXED EDGE (CASE
1) .......................................................................................................................................... 118
APPENDIX E - ANSYS LOG FILE CASE 3 IMMOVABLE SUPPORTED PLATE
WITH OVERHANG ........................................................................................................... 135
APPENDIX F - RITZ METHOD COEFFICIENTS EQUATIONS AND GROEBNER
BASIS EQUATIONS FROM CASE 2 AND CASE 3 ........................................................ 140
APPENDIX G - STRESS IN THETA DIRECTION AND TRANSVERSE SHEAR
PROFILE FOR EACH CASE ............................................................................................. 144
VITA ............................................................................................................................................ 151

viii
LIST OF TABLES
Page
Table 4.1: Case 1: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100 and = 0.3) ........................................................................... 52
Table 4.2: Case 2: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100 and = 0.3) ........................................................................... 53
Table 4.3: Case 3: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100, �/ = 1.5, and = 0.3) ..................................................... 54
Table 4.4: Case 1: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100 and = 0.3) ........................................................................... 55
Table 4.5: Case 2: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100 and = 0.3) .......................................................................... 56
Table 4.6: Case 3: Dimensionless ����/� versus Dimensionless Load �/� and % Error in
����/� (�/ = 1/100, �/ = 1.5, and = 0.3) ..................................................... 57

ix
LIST OF FIGURES
Page
Figure 3.1: Geometry of a Rectangular Thin Plate and Coordinate System .................................. 11
Figure 3.2: Rectangular Plate Variables and Sign Convention ...................................................... 11
Figure 3.3: Kirchoff Kinematics in ��-plane ................................................................................. 13
Figure 3.4: Geometry of Circular Thin Plate and Coordinate System ........................................... 15
Figure 3.5: Sign Convention for the Circular Plate Variables ....................................................... 16
Figure 3.6: In-plane Kinematics for Large Plate Deformation ...................................................... 19
Figure 3.7: Pictorial Description of a Field, Ring, and Polynomial Ring ...................................... 26
Figure 3.8: Pictorial Description of an Ideal .................................................................................. 27
Figure 4.1: Case 1: Fully Clamped Circular Plate ......................................................................... 33
Figure 4.2: Case 2: Simply Supported Immovable Circular Plate ................................................. 34
Figure 4.3: Case 3: Simply Supported Immovable Circular Plate with Overhang ........................ 35
Figure 4.4: Boundary Conditions of Finite Element Quarter Plate Model for Each Case Study ... 42
Figure 4.5: Convergence Study for Case 1 (� = 5���, ν = 0.3 , � = 29� + 6���, =10��, and � = 0.1��) ............................................................................................ 43
Figure 4.6: Mesh of Finite Element Model .................................................................................... 44
Figure 4.7: Case 1: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 ,
� = 29� + 6���, and �/ = 1/100) ..................................................................... 46
Figure 4.8: Case 2: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 ,
� = 29� + 6���, and �/ = 1/100) ..................................................................... 47
Figure 4.9: Case 3: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 ,
� = 29� + 6���, �/ = 1.5, and �/ = 1/100) .................................................. 48
Figure 4.10: Case 1: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , and �/ = 1/100) ..................................................... 49

x
Page
Figure 4.11: Case 2: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , and �/ = 1/100) ..................................................... 50
Figure 4.12: Case 3: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , �/ = 1.5 and �/ = 1/100) ................................... 51
Figure 5.1: Case 1: Dimensionless Displacement versus Dimensionless Load varying
Poisson’s Ratio, .................................................................................................... 62
Figure 5.2: Case 1: Dimensionless Transverse Displacement versus Dimensionless Load
varying Thickness Ratio, �/ (! = 0.3) ................................................................. 63
Figure 5.3: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance "/ ( = 0.3 and � = �/2) ....................... 64
Figure 5.4: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
( = 0.3) ................................................................................................................. 65
Figure 5.5: Case 1: Moment Profile (�#/(��#) = 500/29 and = 0.3) ................................... 66
Figure 5.6: Case 1: Stress Profile through the Thickness (�#/(��#) = 500/29 and = 0.3) .. 67
Figure 5.7: Case 2: Dimensionless Transverse Displacement versus Dimensionless load
varying Poisson’s ratio, ........................................................................................ 71
Figure 5.8: Case 2: Dimensionless Transverse Displacement versus Dimensionless Load
varying Thickness Ratio, �/ ( = 0.3) ................................................................. 72
Figure 5.9: Case 2: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance "/ ( = 0.3 and � = �/2) ....................... 73
Figure 5.10: Case 2: Dimensionless Moment versus Dimensionless Transverse Displacement
( = 0.3) ................................................................................................................. 74
Figure 5.11: Case 2: Moment Profile (�#/(��#) = 500/29 and = 0.3) ................................. 75

xi
Page
Figure 5.12: Case 2: Stress profile through the Thickness (�#/(��#) = 500/29 and =0.3) .......................................................................................................................... 76
Figure 5.13: Case 3: Dimensionless Displacement versus Dimensionless Load varying
Poisson’s Ratio, (�/ = 1.5) ................................................................................ 81
Figure 5.14: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load
varying Thickness Ratio, �/ ( = 0.3 and �/ = 1.5) .......................................... 82
Figure 5.15: Case 3: Non-dimensional radial stress versus non-dimensional maximum
transverse displacement varying radial distance "/ ( = 0.3, �/ = 1.5, and
� = �/2) .................................................................................................................... 83
Figure 5.16: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
( = 0.3 and �/ = 1.5) .......................................................................................... 84
Figure 5.17: Case 3: Moment Profile versus Radial Distance varying �/ (�#/(��#) =500/29 and = 0.3) ................................................................................................ 85
Figure 5.18: Case 3: Stress Profile through the Thickness (�#/(��#) = 500/29, �/ = 1.5,
and = 0.3) .............................................................................................................. 86
Figure B.1: The Affine Variety, %(& − �(), in ℝ( ...................................................................... 103
Figure B.2: The Affine Variety, %(�( + &( + �( − 25), in ℝ* .................................................. 104
Figure B.3: The Affine Variety, %(�* − &* − �*), in ℝ* ........................................................... 105
Figure B.4: The Affine Variety, %(& − �*, & − �) = {(0,0), (−1,−1), (1,1)} in ℝ( ................ 106
Figure B.5: The Affine Variety %(�( + &( + �( − 25, �) = �( + &( − 25 in the �& plane. ..... 107
Figure G.1: Case 1: Transverse Shearing Profile (�#/(��#) = 500/29 and = 0.3). ............ 145
Figure G.2: Case 1: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29, �. = 0.3). ........................................................................................... 146
Figure G.3: Case 2: Transverse Shearing Profile (�#/(��#) = 500/29 and = 0.3). ............ 147

xii
Figure G.4: Case 2: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29, �. = 0.3). ........................................................................................... 148
Figure G.5: Case 3: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29, �/ = 1.5, �. = 0.3) ......................................................................... 149
Figure G.4: Case 3: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29, �/ = 1.5, �. = 0.3). ....................................................................... 150

xiii
NOMENCLATURE
/ Variable to Simplify Expression
0 Variable to Simplify Expression
01 Variable to Simplify Expression
0( Variable to Simplify Expression
2 Variable to Simplify Expression
234 Shear Strain in "5 plane
2�6 Shear Strain in �& plane
2�7 Shear Strain in �� plane
267 Shear Strain in &� plane
8 Variational Operator (Chapter 3)
8 Variable to Simplify Expression (Chapter 5)
944 Normal Strain in 5 direction
933 Normal Strain in " direction
9�� Normal Strain in � direction
966 Normal Strain in & direction
977 Normal Strain in � direction
5 Theta Component Polar Coordinates

xiv
: Expression Simplification Variable
Π Total Strain Energy
<44 Normal Stress in 5 direction
<33 Normal Stress in " direction
<�� Normal Stress in � direction
<66 Normal Stress in & direction
<77 Normal Stress in � direction
=�6 Shear Stress in �& plane
=�7 Shear Stress in �� plane
=67 Shear Stress in &� plane
Poisson’s Ratio
>?@ Shape Function for in-plane displacement
>A@ Shape Function for in-plane displacement
Radius from center to support
� Radius from center to overhang free edge
B Plate Bending Rigidity
� Modulus of Elasticity
C Shear Modulus

xv
DE Leading Coefficient
DF Leading Monomial
DG Leading Terms in a Polynomial
F�� Moment in the � direction
F66 Moment in the y direction
F�6 Moment in the �& direction
F33 Moment in the " direction
F44 Moment in the 5 direction
H33 Normal force in " direction
H44 Normal force in 5 direction
� Transverse uniform distributed load
I44 Transverse Shearing Force in the 5 direction
I33 Transverse Shearing Force in the " direction
I�� Transverse Shearing Force in the � direction
I66 Transverse Shearing Force in the & direction
" Radial Component Polar Coordinates
J In-plane Displacement Component in � direction
J3 In-plane Displacement

xvi
J3KL In-plane Displacement in overhang region
M Total Strain Energy
MN Strain Energy from bending
M� Strain Energy from membrane
! In-plane Displacement Component in & direction
M Potential Energy
� Transverse Displacement
�KL Transverse Displacement in overhang region for Case 3
ℂ The Set of Complex numbers
ℚ The Set of all Rational numbers
ℝ The Set of all Real numbers
ℤ The Set of all Integers
ℤR The Set of all Positive Integers

1
CHAPTER 1
INTRODUCTION
The goal of this thesis is to apply the Groebner basis methodology to generate analytical
solutions in plate problems as a relative new alternative to the commonly used numerical methods
such as the finite element methods to the engineering community. In this thesis, it will be
accomplished by exploring a method in which Groebner basis is used as a tool of solving a
system of nonlinear algebraic equations to find a purely analytical solution for an axisymmetric,
geometrically nonlinear circular isotropic plate. Although Groebner basis has been found useful
in the mathematics community, there have not been many applications found for applied
engineering problems; see section 2.2 for examples.
1.1 Motivation and Overview
Today, industries are trying to become more cost competitive. They are trying to achieve
this through a variety of methods such as weight savings. One way to try and find weight savings
is by using more advanced materials that has highly nonlinear and coupled nature. The
geometrically nonlinear behavior in the structure components is one of them, such as the material
of the component is in the linear elastic range even when subjected to large displacements. When
structures are subjected to large displacements more accurate models must be used. These more
accurate models have a higher degree of difficulty in analyzing. However, they yield a more
accurate answer and ultimately result in a much lighter weight structure than developing a design
using traditional linear assumptions. Comparisons have shown that the linear equations can
produce a large inaccuracy in the analysis at high load levels [1]. Much of the research when
dealing with large displacements is analyzed by using the finite element method or some other

2
numerical method. A quick literature search will show hundreds of papers with different
numerical methods to find a solution. These methods can be very computer and user intensive
requiring a large amount of parameters to be run to determine the best design. Unfortunately,
there are very few analytical equations that describe the geometrically nonlinear plates and most
all are merely solutions for the maximum stress or deflection at a certain point. None have shown
a purely symbolic closed form solution.
For geometrically nonlinear analysis of plates, the analytical solutions tend to be shied
away from do to its complexity. The complexity in finding a solution comes from including the
addition of the von Kármán equations for strain. In traditional linear assumptions, the in-plane
displacement is considered negligible. However, when subjected to large deflections the
assumption that the in-plane displacement is negligible is no longer true, so the addition of the
von Kármán strains account for the membrane strains due to in-plane loading. This makes the
plate problem more complex by having to account for the in-plane and out-of-plane displacement.
Through the use of the Ritz method approximate the displacement function can be used to
minimize the total potential energy in a system and the result is a system of algebraic equations.
Groebner basis is used to take this system of equations developed by the Ritz method and
decouple the multivariate equations into a solvable system of equations. This tool, Groebner
Basis, is not utilized very often in the engineering community and this thesis will demonstrate
how powerful it can be to help solve complex system of equations. There are many engineering
problems that can be helped by the use of Groebner basis. And now, many symbolic computation
software packages have created algorithms to easily compute Groebner basis making it accessible
to many engineers. Therefore, it is vital to try and make the existence of this tool known to the
community.

3
1.2 Scope of Work
The primary objective of this study is to develop a general methodology of using
Groebner bases in conjunction with the energy method for solving geometrically nonlinear
isotropic circular plates analytically. As an example, three case studies defined in Chapter 4 are
analyzed using the proposed methodology to obtain the closed form solutions; and evaluate the
performance of using this method for the geometrically linear and nonlinear behaviors of the
plates by comparing the solutions from this method to the numerical solutions from a commercial
finite element software package, ANSYS.
This thesis is organized into six chapters as follows. In Chapter 2, a brief literature review
of plate theories and Groebner bases. The plate section provides a brief history and many
examples of plate analysis. Also, included are references of plate solutions based on different
methods such as finite strip and finite element. The Groebner basis section discusses some
historic background and some limited applications found in different engineering fields such as
ones in railway interlocking systems, buckling problems, and robotics.
In Chapter 3, the two most common plate theories, Kirchoff (classical plate theory) and
von Kármán (lager strain theory) theories, are reviewed briefly. The total potential energy is
discussed and presented in the polar coordinate system for an axisymmetric plate problem and
followed by a review of the concept of Ritz method. Finally, a detailed review of Groebner basis
is provided to give the reader a comprehensive background on the subject.
In Chapter 4, three case studies are defined in Section 4.1 used as examples for the
validation of the method. The trial functions used for the Ritz approximation are presented for
each case. Also, the computer software packages used in the study are presented. In the final
section, a comparison of the results between ANSYS and the current study is presented with
detailed discussions. The comparisons show good agreement between the two solutions.

4
Chapter 5 mainly demonstrates the results of the parametric studies for each case. First
the closed form solutions for the transverse displacement, moment, shear force, and stress
function are calculated and presented from each case study. Then based on the closed form
solutions, a set of plots from parametric study in terms of the material and geometric properties
for each case are generated and presented to show the effects of the plate performance under
different parameters.
Finally, the conclusion and recommended future work are given in Chapter 6.

5
CHAPTER 2
LITERATURE REVIEW
The current topic being discussed is using Groebner Basis to solve a geometrically
nonlinear plate problem. The majority of literature on the subject of geometrically nonlinear
plates indicates that they have been solved by using numerical methods such as finite element
analysis. The availabilities of analytical solutions for geometrically nonlinear plate problems are
very few due to the fact that the coupling of the plate equations and the von Karman constraints
makes the problem highly nonlinear. The methodology developed in this study is not found
currently in the body of knowledge and has shown itself to match proven research. The following
sections will summarize the works found on plate analysis and Groebner basis.
2.1 Plates
Plate analysis is currently used to determine adequacy of design across the civil, marine,
aerospace, and many other engineering disciplines. Plates are very important structural
components used in dam walls, slabs in floors of buildings, hulls of ships, aircraft fuselages, and
much of the propulsion system in rockets. Before advanced mathematics was developed, much of
the work was handed down by so called "rules of thumb" from generations of early engineers.
One of the first "rules of thumb" passed down was for designing floor slabs in buildings [2]. The
designers decided the strength of the plate by how thick it needed to be and the designer used this
method for many years until mathematicians tried to describe this physical problem and thickness
is the first described variable that was associated with modern plate assessment.
The first mathematical models of plates were developed by Sophie Germain who
correctly described the differential equation that is the foundation of plate theory. Navier was the

6
first to apply Bernoulli's beam hypothesis to plates and correctly described the plate constant and
the first differential equation subject to transverse loads by using Fourier series to force a
solution. This solution only worked for simply supported rectangular plates, and could never be
used for different boundary conditions. Then Kirchhoff, who is considered the founder of
extended plate theory [3], was able to develop the first complete theory of plates with
supplementary boundary conditions. This development led to the boundary conditions being able
to be described as functions of displacement and their derivatives. One of his most significant
discoveries is that in-plane displacement cannot be neglected when the displacement becomes
large. Much of the linear solutions can be found in classic books such as Timoshenko's Theory of
Plates and Shells [4].
Researchers today tend to solve the large displacement of plates through numerical
methods. There is a great deal of literature on this subject, an eight-node hexahedral finite
element analysis of geometrically nonlinear plate in static and dynamic loading conditions was
shown in a paper by Duarte Filho and Awruch's [5]. A smoothed finite element method by Cui,
et al [6] was used to describe both linear and geometrically nonlinear plates using bilinear
quadrilateral elements. A boundary element mesh free plate analysis by Tiago and Pimenta [7]
was proposed and had good accuracy when the displacement and stress field were relatively
smooth. There are also examples of using finite strip method to solve plates with large
deflections by Shahidi et al [8]. Narayana and Krishnamoorthy developed a shell element that has
large-scale capabilities due to the stiffness matrices being relatively small [9]. Other elements
have been developed to deal with problems that have a geometric and material nonlinearity such
as with Bathe and Bolourch's [10] shell element that could solve large deflections of a square
plate due to a pressure load. These are just a few of the examples, however numerical results are
only good for one set of parameters and can also be prone to errors.

7
Babuska and Li evaluated the swings between a theoretical solution compared to a
computational one [11]. They noted the importance of boundary conditions and how they can
give significant inaccuracies especially in areas around the boundary. Wan's paper talks about
stress boundary conditions and their importance to accurately describing plate bending [12] and
develops boundary conditions that can be used for high order plate analysis. A paper by Reddy
and Averill [13] discusses some refined theories of composite plates and the aspects that make
Kirchoff's assumptions not valid for modeling composite plates.
Analytical solutions are much more vigorous and may not lead to some of the troubles
including edge concerns and singularities. However, exact solutions for geometrically nonlinear
plate analysis are very hard to obtain, and can only be found for problems of the simplest
geometry and simplest boundary conditions as in a circular plate on an elastic foundation [14] and
a rectangular plate subject to a concentrated load with different boundary conditions [15]. Chia's
book on nonlinear analysis of plates discusses many different solutions [16], however the
formulas developed are only good for the maximum deflection or the maximum stress. Large
deflections of circular plates with clamped and simply supported edges are developed in Chia's
book by assuming the in-plane deflection as third degree polynomial and solving the governing
equations.
Some literature have transformed the plate differential equation to develop analytical
solutions for plates with differing degrees of nonlinearity since there is no method that can solve
ever nonlinear differential equation exactly. The Airy stress function is used in Thomas and
Bilbao's paper [17] to produce semi-analytical results for geometrically nonlinear flexural
vibrations of plates. Lagrange equations are used in the paper by Haterbouch and Benamar [18]
to study simply supported thin isotropic plates. Amabili and Carra [19] study the thermal effects
on a simply supported plate. A hybrid method derived by Yeh et al [20] uses the finite difference
method and the differential transformation method to solve a clamped orthotropic rectangular

8
plate with large deflections. The Galerkin Method was used to solve a rectangular plate problem
with three clamped edges and one simply supported edge [21].
The use of Rayleigh-Ritz method is used extensively in flexural vibrations of plates. In
Reddy's book [22] the Ritz method is used to solve many examples of plate problems. Dickinson
and Blasio used the Ritz method to solve natural frequency and plate buckling examples of
isotropic and orthotropic rectangular plates [23]. Singh and Chakraverty developed orthogonal
polynomials to study natural frequencies in the transverse direction and develop mode shapes
[24]. Liew developed many solutions to vibrations of Mindlin plates using the Ritz method [25].
2.2 Groebner Basis
Groebner bases for ideals in polynomial ring were introduced in 1965 by Buchberger and
named after his dissertation advisor. The related work of “standard bases” for ideals in power
series ring was developed in 1964 by Hironaka independently. However, Buchberger was the
first to provide a useful algorithm for the determination of Groebner bases in his doctoral
dissertation [26], which has been implemented in many mathematical symbolic computational
software packages. This is a main reason that the Groebner basis methodology now becomes
feasible for many science and engineering applications.
Much of the literature for Groebner basis is being utilized in a different fashion than
computational mechanics. The core use for Groebner basis is to solve nonlinear algebraic
equations. However, researchers have applied the use of Groebner basis to solve difficult
mathematical proofs [27] in nonlinear geometry, robotic kinematics [28], and railway
interlocking systems [29]. At Johannes Kepler University in Linz, Austria, the Research Institute
for Symbolic Computation is continually exploring new applications for Groebner basis.
Boege et al demonstrate some examples and show current limitation by Groebner basis,
as well as the importance of polynomial ordering effects on the polynomials returned from

9
Groebner basis [30]. Borisevich et al discusses different algorithms to solving Groebner basis
and show solvability criteria and uniqueness criteria [31]. Since its inductance into symbolic
computation software packages it is being used to solve problems analytically [32] which is more
desirable to have than numerical solutions.
Ioakimidis is leading the way in applying Groebner basis to solve different physics and
mechanics problems. He has shown how to solve a particle moving along the circumference of
the circle of a radius[33], elasticity problems [34], a truss problem [35] and determining critical
buckling loads [36]. Also at Tennessee Technological University, research is being done to apply
Groebner basis to mechanics problems such as Liu's paper on nonlinear cables [37] and
Vandervort's thesis on geometrically nonlinear rectangular plates [38].
The small amount of research indicates that Groebner basis is not known among a large
majority of the engineering community. This may be due to the fact that before the widespread
use of technology, finding a Groebner basis could be a long task to complete. However, now
many symbolic computational software packages such as Maple and Mathematica come with
procedures to have the Groebner basis calculated. These procedures will be used to help solve
the nonlinear plate problem.

10
CHAPTER 3
THEORETICAL BACKGROUND
This chapter provides theoretical background for the present study. The chapter begins
with a brief review of two widely used plate theories, the Kirchoff plate theory (classical) and
geometrically nonlinear plate theory. The Kirchoff theory is presented in Cartesian and
cylindrical coordinate systems in section 3.1.1 and 3.1.2 respectively. The geometrically
nonlinear plate theory is then reviewed briefly in section 3.1.3. Following that, the current study
is to analyze the plate bending problem using the energy method, in section 3.2 the principle of
total potential energy and the Ritz method are also briefly reviewed. Lastly in this chapter, the
method of Groebner basis is reviewed in detail.
3.1 Review of Thin Plate Theory
In mechanics, the plate is a three dimensional structure defined by the thickness being
much less than the other two dimensions. Consider a rectangular plate in the �&-plane with a
uniform thickness, � and a mid-plane area, S with side lengths and �. Let J(�, &, �) and
!(�, &, �) be the in-plane displacement and �(�, &, �) be the transverse displacement of a point
(�, &) on the mid-surface of the plate. In general, a plate is considered to be thin when the
thickness to the length ratio, T� is roughly between 1/50 to 1/500. In Figure 3.1, the geometry of a
rectangular thin plate is depicted and the sign convention of the plate variables in the rectangular
coordinate system is shown in Figure 3.2.

11
Figure 3.1: Geometry of a Rectangular Thin Plate and Coordinate System
Figure 3.2: Rectangular Plate Variables and Sign Convention

12
3.1.1 Kirchoff Plate Theory
The kinematics of Kirchoff plates are derived using the following assumptions.
• Thin plate assumption: Since the thickness, � is much smaller in comparison to
the length in the �&-plane, the elongation in the � direction is much smaller than
in the � and & directions. That means the strain, 977 is negligible. Therefore,
977 = 0 or UAU7 = 0 (3.1).
This leads to the conclusion that the transverse displacement only varies with � and &,
� = �(�, &) (3.2).
• Plane sections remain plane and normal to the middle plane assumption: The
plane sections before bending remain plane after bending; the normals to the
middle plane before bending remain normal to this plane after bending as
depicted in Figure 3.3.
This implies that the shearing strains, 267 and 2�7 are small enough to be negligible.
Taking 2�7 = 0 and 267 = 0, we have
V�V& + V!V� = 0
V�V� + VJV� = 0
(3.3)

13
which leads to the in-plane displacements J and ! as follows
J = −� V�V�
! = −� V�V&
(3.4).
Figure 3.3: Kirchoff Kinematics in ��-plane
Due to all of the assumptions above, the following assumption can be concluded.
• Middle plane unstretched assumption: The middle plane of the plate remains
unstretched even though the middle plane becomes curved after bending.
Therefore, the resulting kinematic equations based on Kirchhoff assumptions are shown
in equation (3.5).

14
WXYXZ9��9662�6 [X\
X] =WXXYXXZ ∂J∂�∂!∂&∂J∂& + ∂!∂�[XX
\XX] = −�
WXXYXXZ V(�V�(V(�V&(2 V(�V�V&[XX
\XX]
(3.5)
From equation (3.5), the constitutive equations for linear elastic isotropic material in
terms of transverse displacement, � are shown in equation (3.6).
_<��<66=�6` = −z �(1 − ()b
1 0 1 00 0 (1 − )2 cWXXYXXZ V(�V�(V(�V&(2 V(�V�V&[XX
\XX]
(3.6)
where � is the modulus of elasticity and is the Poisson’s ratio. The bending moments can be
determined by integrating over the thickness presented in equation (3.7).
dF��F66F�6e = f _<��<66=�6` �.�
T(gT( = D
WXXYXXZV
(�V�( + V(�V&(V(�V&( + V(�V�((1 − )2 V(�V�V&[XX\XX]
(3.7)
where B is the plate bending rigidity, B = iTj1((1gkl). In the same manner, the transverse shearing forces can be described in the terms of the
bending moments illustrated in equation (3.8).
mI��I66n = WXY
XZ∂F��∂� + ∂F�6∂&∂F66∂& + ∂F�6∂� [X\X]
(3.8)

15
3.1.2 Transformation of Coordinate System
Since the circular plate will be examined in all case studies, it is convenient for the
analysis to use cylindrical coordinates instead of rectangular coordinates. In this section, the
governing equations based on the Kirchoff theory will be transformed from rectangular
coordinates to cylindrical coordinates. Let’s consider a plate in the "5-plane with a uniform
thickness, � and a middle plane area, S with radius . Let J3(", 5, �) and J4(", 5, �) be the in-
plane displacement and �(", 5) be the transverse displacement of a point (", 5) on the mid-
surface of the plate. Figure 3.4 shows the geometry of the circular thin plate and the sign
convention of the circular plate variables in the cylindrical coordinate system are illustrated in
Figure 3.5.
Figure 3.4: Geometry of Circular Thin Plate and Coordinate System

16
Figure 3.5: Sign Convention for the Circular Plate Variables
The relations between polar and rectangular coordinates are
"( = �( + &(, 5 = "o�� p6�q (3.9)
� = "or�(5), & = "���(5)
(3.10)
from which
U3U� = or�(5), U3U6 = ���(5) (3.11)
U4U� = − stu(4)3 , U4U6 = vKs(4)3 (3.12)
the transverse loading and deflection are considered as a function of " and 5, that is, � = �(", 5) and � = �(", 5). Based on the chain rule the first derivatives,
UAU� and UAU6 can be determined in
terms of UAU3 and
UAU4 shown in Equation (3.13).

17
WYZV�V�V�V&[\
] = bcos(5) −1" sin(5)sin(5) 1" cos(5) c |V�V"V�V5} (3.13)
Performing the same transformation, the second derivatives in terms of " and 5 are given in
Equation (3.14).
WXXYXXZ V(�V�(V(�V&(V(�V�V&[XX
\XX] =
~����� or�((5) 1"( ���((5) −2" or�(5)���(5)���((5) 1"( or�((5) 2" or�(5)���(5)or�(5)���(5) 1" or�(5)���(5) 1" or�((5) − 1" ���((5)���
���
WXXYXXZV(�V"(V(�V5(V(�V"V5[XX
\XX]
+~�����
1" ���((5) 2"( or�(5)���(5)1" or�((5) 2"( or�(5)���(5)1" or�(5)���(5) 1"( ���((5) − 1"( or�((5)������|V�V"V�V5}
(3.14)
For the axisymmetric circular plate, the transverse loading and deflection become a
function of only " that is to say, � = �(") and � = �("). The kinematic equations in cylindrical
coordinates based on the Kirchoff theory for the axisymmetric case are reduced to
WXYXZ933944234 [X\
X]
��������= −�
WXYXZV(�V"(1" V�V"0 [X\
X]
(3.15).
Based on Equation (3.15) the stress-strain relations will be
�<33<44��������� = �(1 − () �1 1� |−�V(�V"(−� 1" V�V"} (3.16).

18
Similarly to the Cartesian bending moment equations, the moment can be found by
integrating over the thickness.
mF33F44n = f �<33<44� �.�
T(gT( =−BWY
ZV(�V"( + 1" V�V"1" V�V" + V(�V"([\]
(3.17)
The transverse shearing forces can be described in the terms of displacement and is shown in
Equation (3.18).
mI33I44n = d ∂∂" �V(�V"( + 1" V�V"�0 e
(3.18)
3.1.3 Geometrically Nonlinear Plate Theory
In the previous section, the Kirchoff plate theory was discussed, which is a linear theory
based on the assumption that the plates will be subject to small displacements. In cases in which
deformations are no longer small in comparison with the thickness of the plate but are still small
compared to the other dimensions, the small displacement assumption is no longer valid for these
cases. Figure 3.6 shows the in-plane kinematics for large plate deformation.

19
Figure 3.6: In-plane Kinematics for Large Plate Deformation
The strain is calculated by taking the change in length and dividing it by the original
length in Equation (3.19).
ε�� = A�B�� − ABAB
(3.19)
where S� is the original length from point S to point �, S′�′′ is the deformed length from point
S′ to point �′′. The strain can be calculated as follow
ε�� = �dx( + p∂w∂x dxq(�1( − dxdx
(3.20).
manipulating Equation (3.20) yields the following equation

20
ε�� = �1 + �∂w∂x�(�
1( − 1
(3.21).
then using a Taylor expansion, the strain in the � direction is reduced to
ε�� = 12 �∂w∂x�(
(3.22).
only the first term of the Taylor series is used for this derivation.
Similarly to the calculation of 9�� the other strains 966 and 2�6 are derived in the same
manner. The strains shown in Equation (3.23) are only due to large transverse displacements.
WXYXZ9��9662�6[X\
X]�Ku�á3�áu
=WXXYXXZ
VJV� + 12 �V�V��(V!V& + 12 �V�V&�(12 �V�V�� �V�V&�¡[XX\XX]
(3.23)
transforming these strains into cylindrical coordinates for an axisymmetric plate, yields
WXYXZ933944234 [X\
X]
�Ku�á3�áu=
WXYXZVJ3V" + 12 �V�V" �(J3"0 [X\
X] (3.24).
Notice that in equation (3.24) the in-plane displacement (J3) is included in the kinematic
equation for large deformation known as von Kármán strains which will be used in the
formulation of the strain energy functional for this study.
As a result of the large deformation kinematic equation, in plane forces are present in the
plate. The in-plane forces can be calculated by integrating over the thickness. Equation (3.25)

21
shows the in-plane forces based on the large deformation kinematic equations for axisymmetric
circular plates. Because the plate is considered axisymmetric, H34 is equal to zero.
mH33H44n = f �<33<44� .�T(
gT( = �ℎ(1 − () WXYXZ VJ3V" + 12 �V�V" �( + J3"J3" + �VJ3V" + 12 �V�V" �(�[X\
X] (3.25)
3.2 Principle of Minimum Total Potential Energy
The principle of virtual work states that if the force system including internal and external
forces is in equilibrium the total amount of work done by all the forces moving through an
arbitrary virtual displacements has to be zero. The principle of minimum total potential energy is
a special case of the principle of virtual work that deals with elastic bodies. It shows that the
displacements in the elastic body, in the absence of any energy loss, will deform to a position
where the total potential energy will be minimized. The principle can be expressed in equation
(3.26) equivalently.
12f<t£9t£.Ω¥ −f¦t8Jt.Ω
¥ = 0 (3.26)
where <t£ is the stress tensor components, 9t£ is the strain tensor components, ¦t is the external
loading, 8Jt is the arbitrary virtual displacement in the elastic body, and Ω is the domain. Let the
first integral in equation (3.26) be the total strain energy and will now be denoted by M and the
second integral in equation (3.26) is the potential energy by external forces and will now be
denoted by §. Let Π be the total potential energy which is described in equation (3.27).
Π = M + § (3.27)
The variation of the total potential energy is in the form of
8Π = 8(M + §) (3.28)

22
based on the principle of minimum of total potential energy, the first variation of the total
potential energy must be equal to zero.
8Π = 0 (3.29)
3.2.1 Total Potential Energy Functional
The following section will show the derivation of the total strain energy for the
geometrically nonlinear isotropic axisymmetric circular plate. Given that the deflections are
geometrically nonlinear, membrane (in-plane) effects must be taken into account. Total strain
energy will be split into two components: the bending strain energy, MN and the membrane strain
energy, M�. Therefore, the total strain energy is
M = MN + M� (3.30).
In cases for the axisymmetric circular plate the total strain energy M can be formed in cylindrical
coordinate system as shown in Equation (3.30).
12f f (<33933 + <44944).Ω.�
¥T(
gT( (3.31)
The bending strain energy, MN can be calculated by substituting equations (3.15) and
(3.16) into equation (3.31). The resulting strain energy in terms of transverse displacement is
shown in equation (3.32).
MN = ¨Bf ©" �V(�V"( �( + 1" �V�V" �( + 2 V(�V"( V�V" ª ."«¬ (3.32)
The membrane strain energy, M� can be calculated by substituting equation (3.24) into
equation (3.31) and the linear elastic constitutive equations. The resulting strain energy in terms
of in-plane and transverse displacements (von Kármán strains) is shown in equation (3.33).

23
M� = 12¨Bf _VJ3V" + 12 �V�V" �(®( + pJ3" q( + 2 J3" VJ3V" + 12 �V�V" �(®` "."«¬ (3.33)
The potential energy due to the transverse load, � and transverse displacement can be
described as following
V = f ��"."«¬ (3.34).
The total potential energy functional is shown in equation (3.35).
Π = f ©¨B " �V(�V"( �( + 1" �V�V" �( + 2 V(�V"( V�V"¡«¬
+ 12¨B _�VJ3V" + 12 �V�V" �(�( + pJ3" q(+ 2 J3" �VJ3V" + 12 �V�V" �(�° " − "��ª ."
(3.35)
3.2.2 The Ritz Method
The Ritz method is a procedure to obtain the displacement components by assuming
displacement functions in the form of linear combinations. For example, the assumed
displacement functions for axisymmetric circular thin plate is shown in equation (3.36).
J3 = J3¬ +±St>?@�t²1
� = �¬ +±�t>A@u
t²1
(3.36)
where J3¬ and �¬ are displacement functions chosen to take the value of predescribed
displacement components on the displacement boundary conditions; >?@ and >A@ are
displacement shape functions that satisfy the essential boundary conditions; St and �t are ³ + �

24
independent coefficients for which to be determined. It is noticed that the displacement variation
are realized by the variation of the independent coefficients.
Based on the principle of minimum total potential energy, 8Π = 0 with the Ritz
approximation, the functional will be converted to a ³ + � system of algebra equations by
variation of coefficients
VΠVSt = 0
VΠV�t = 0 (3.37).
Based on the geometric nonlinear circular plate problem, the system of algebra equation
will be coupled and nonlinear. Therefore, Groebner can be used to decouple the system of
algebra equations to be solvable analytically.
3.3 Groebner Basis
The Groebner basis was introduced by B. Buchberger in 1965 [26]. With the increasing
capability of symbolic computation in recent years, Buchberger’s Algorithm to compute a
Groebner basis has been implemented into different computer algebraic systems like Maple,
Mathematica, AXIOM, CoCoCA, Macaulay, etc., which made Groebner basis become a feasible
tool for many scientific and engineering applications. The present study is to apply a
combination of Groebner basis and Ritz methodologies to the plate bending problems. In this
section some basic concepts and definitions related to Groebner basis will be reviewed, and the
details of the mathematical background and underlying proofs can be found in books such as Cox
et. al [39]. In particular, we are interested in solving nonlinear systems of equations using
Groebner bases.

25
3.3.1 Preliminary Concepts from Abstract Algebra
To get a basic understanding of what a Groebner Basis is, some basic concepts from
abstract algebra such as fields, commutative rings, ideals and monomial orderings are presented
in Appendix A. Fields, commutative rings, ideals are all forms of algebraic structures. An
algebraic structure is a set which impose operators that meet certain axioms. A formal definition
of a field is presented in Appendix A-1. Field are commonly represented by the letter ´. Some
well known fields are the set of real numbers, ℝ, the set of rational number, ℚ, and the complex
set of numbers, ℂ. Another important algebraic structure to understand is a commutative ring. A
formal definition of a commutative ring is presented in Appendix A-2. A commonly known
commutative ring is the set of integers, ℤ.
3.3.2 Monomials and Polynomials
A monomial in � variables �1, �(, … , �u is a product of the form �1¶·�(¶l …�u¶¸ where
all the exponents are positive integers. The total degree of a monomial is calculated by adding
the / terms (/TKT = /1 + /( +⋯/u).
A polynomial in � variables �1, �(, … , �u is a finite linear combination of monomials
with coefficients from the field ´. Let ¦ be a polynomial, then the polynomial can be described
as
¦ = ±¶�¶ ,¶ ∈ ´¶
(3.38).
where the sum is over a finite number of �-tuples / = (/1, … , /u). The set of all polynomials in
�1, … , �u with coefficients from ´ is denoted as ´»�1, … , �u¼. Figure 3.7 shows pictorial relations
among field, commutative ring, and polynomial ring.

26
Figure 3.7: Pictorial Description of a Field, Ring, and Polynomial Ring
3.3.3 Monomial Ideals and Dickson’s Lemma
A general definition of an ideal is presented in Appendix A-3. A monomial ideal in the
polynomial ring ´»�1, … , �u¼ is considered to be a monomial ideal if there is a subset S ⊂ ℤR
such that ¾ ⊂ ´»�1, … , �u¼ consists of all polynomials which are finite sums of the form:
±ℎ¶�¶ , �ℎ�"�ℎ¶ ∈ ´»�1, … , �u¼¶∈¿ (3.39).
In this case, we write ¾ =< �¶: / ∈ S >.
Dickson’s Lemma introduces an important idea that states that an ideal, which is an
infinite set, can be defined by a finite set of generating monomials. The lemma states that a
ℝ ℚ ℂ
Examples:
Definition:
See Appendix A-2
Examples:
´
ℤ
��.���"³����´»�1, … , �u¼ Definition:
See Appendix A-1 ´:¦��Ã.´�Ã�³���:¦1, … , ¦�,…

27
monomial ¾ =< �¶: / ∈ S ⊂ ℤR >⊆ ´»�1, �(, … , �u¼ can be written in the form ¾ =<�¶(1), … �¶(u) > where �¶(1), … �¶(u) ∈ S ⊂ ℤR and that monomial ideals have a finite basis.
3.3.4 Polynomial Ideals and Hilbert’s Basis Theorem
Let ¦1, … , ¦u be polynomials in the polynomial ring ´»�1, … , �u¼. Then a polynomial
ideal can be defined as:
<¦1, … , ¦s >= ±ℎt¦tu
t²1 ∶ ℎ1, ℎ(, … , ℎu ∈ ´»�1, … , �u¼ (3.40).
as a result, ¾ is finitely generated if there exist ¦1, … , ¦s ∈ ´»�1, … , �u¼ such that ¾ =< ¦1, … , ¦s >
and ¦1, … , ¦s is a basis of ¾. Figure 3.8 shows a pictorial relationship between a polynomial ring
and a polynomial ideal.
Figure 3.8: Pictorial Description of an Ideal
´»�1, … , �u¼ Definition:
See Appendix A-3 0¦1 + ¦( ¦1 ∙ ¦* ¦*

28
Hilbert’s Basis Theorem states that every ideal ¾ ∈ ´»�1, … , �u¼ has a finite generating
set of polynomials. That is ¾ =< ¦1, … , ¦s > for some ¦1, … , ¦s ∈ ¾. It indicates that any
polynomial ideal ¾ can be generated by different bases.
3.3.5 Definition of a Groebner Basis
A finite set of polynomials, ¦1, … , ¦s ∈ ´»�1, … , �u¼ generates an ideal, ¾ =<¦1, … , ¦s >in ´»�1, … , �u¼. The set ¦1, … , ¦s is known as a basis of ¾. This means that every
ideal, ¾ in ´»�1, … , �u¼ can be generated by different finite set of polynomials. The Groebner
Basis is a type of generating set where if the monomial order is fixed then a finite generating set
Ç1, … , ÇT of an ideal ¾ is said to be a Groebner Basis if:
< DG(Ç1), … , DG(ÇT) >=< DG(¾) > (3.41).
There exists a theorem called “Buchberger’s S-pair criterion” which shows that a basis of
an ideal ¾ in ´»�1, … , �u¼ is a Groebner basis. The theorem states that a basis C = {Ç1, … , ÇT} for
¾ is a Groebner basis if and only if for all pairs when � ≠ É, the remainder on the division of
Ê(Çt , Ç£) by C with a fixed monomial order is zero. The proof of this theorem can be found in
Buchberger's thesis, which was translated and reprinted into English in this reference [26]. The
proof proposes that to compute a Groebner basis for an ideal ¾ generated by Ë = {¦1, … , ¦s} one
must extend the basis Ë to a Groebner basis by successively adding nonzero remainders to Ë.
Buchberger’s algorithm is presented in Appendix A-5.
The generated Groebner basis will typically have unnecessary elements, and once further
constraints are applied these unnecessary elements will be eliminated resulting in a minimal
Groebner basis. The minimal Groebner basis, C, for an ideal ¾ is defined as:
DE(�) = 1∀� ∈ C ∀� ∈ C, DG(�) ∉< DG(C − �) >
(3.42).

29
Although in a given ideal in ´»�1, … , �u¼ there can still remain multiple minimal Groebner bases.
Therefore, further constrains can lead to a reduced Groebner basis which is unique. A reduced
Groebner basis for an ideal ¾ is a Groebner basis C such that:
DE(�) = 1∀� ∈ C ∀� ∈ C, no monomial of � belongs to < DG(C − �) >
(3.43).
There are many monomial ordering schemes for generating different Groebner Bases,
some typically ordering schemes found in symbolic computation software packages include
lexicographic order, graded lexicographic order, and graded reverse lexicographic order. Some
examples of these ordering schemes are provided in Appendix A-4.
Every polynomial ideal had finite generating sets and for a fixed monomial order every
ideal ¾ in ´»�1, … , �u¼, other than {0}, has unique reduced Groebner basis, and this basis has
proven to have many uses in multiple fields. For example, this thesis will use the Groebner basis
to help solve a nonlinear system of polynomial equations. More applications were shown in
Chapter 2.
3.3.6 Affine Variety: the link between the Groebner bases and the original generating set
functions
In particular, we are interested in solving nonlinear systems of equations using Groebner
bases. To understand the connection between Groebner bases and algebraic equations, it is
necessary to grasp the concept of affine space and affine varieties. It has the ability to link
polynomials from algebraic objects to geometric objects. For a given field ´ and a positive
integer �, then the affine space is defined as
´u = {(1, … , u): 1, … , uδ} (3.44).

30
namely, an �-dimensional affine space, ´u is simply a set of the collection of all the points of �-
tuples from field ´. For example, ´ = ℝ, then ´( would be a collection of all the points (�, &) in
a two dimensional real number space, ℝ( in linear algebra.
Let ´ be a field, and a set of finite polynomials ¦1, … , ¦s ∈ ´»�1, … , �u¼ the affine
varieties defined by ¦1, … , ¦s are a set of points
§(¦1, … , ¦s) = {(1, … , u) ∈ ´u|¦t(t , … , u) = 0}∀1 ≤ � ≤ � (3.45).
where § denotes the affine variety. Therefore, an affine variety §(¦1, … ¦s) ∈ ´u is a set of
solutions or points which satisfies {¦1(�1, … , �u), … , ¦s(�1, … , �u)} = 0. Several examples of
affine variety are given in Appendix B.
Based on the definitions of the ideal ¾ =< ¦1, … , ¦s >, generated by ¦1, … , ¦s, it is easy to
show that the affine variety defined by the ideal < ¦1, … , ¦s > is its generating set:
§(¦1, … , ¦s) = §(< ¦1, … , ¦s >) (3.46).
On the other hand, if the finite set Ç1, … , ÇT is a basis of the ideal generated by ¦1, … , ¦s, then
¾ =< ¦1, … , ¦s >=< Ç1, … , ÇT > (3.47).
Therefore,
§(¾) = §(< ¦1, … , ¦s >) = §(< Ç1, … , Çu >) (3.48).
In particular, if the set Ç1, … , ÇT is the reduced Groebner basis for the ideal < ¦1, … , ¦s >, finally,
we have
§(¾) = §(¦1, … , ¦s) = §(Ç1, … , ÇT) (3.49).

31
It is the key that the affine variety of the Groebner basis will be the same as the original
system of equations. Therefore, the Groebner basis can be used to solve the original system of
equations.

32
CHAPTER 4
IMPLEMENTATION AND METHOD VALIDATION
In this chapter, the validation and implementation are presented in detail. The current
study is tested by examining three cases of geometrically nonlinear circular plates defined by
different boundary conditions. Section 4.1 introduces each of the three case studies and their
boundary conditions. The shape functions used for each case are provided in section 4.2 and the
trial functions for each case are shown in section 4.3. In section 4.4, the implementation of the
two computer software packages, ANSYS and Maple used for the current study are discussed.
Then in Section 4.5, two types of comparisons are presented. One is a comparison of the results
from the current study to the results generated by the finite element simulation and the results of
the exact solution using the linear theory, and the other is a comparison of the results from the
current study using only one coefficient in the trial function for the transverse displacement to the
results of using two coefficients in the trial functions for the Ritz approximation. The
comparisons serve as a validation for the current study.
4.1 Case Studies
4.1.1 Case 1: Fully Clamped Circular Plate
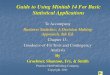
Case 1 is a fully clamped circular plate with the support located at the edge of the plate,
, and subjected to a uniform distributed transverse load of intensity, �, on its upper surface as
shown in Figure 4.1. The boundary conditions are expressed in equation (4.1).

4.1.2 Case 2: Simply Supported Immovable Circular Plate
edge of the plate,
upper surface
4.1.2 Case 2: Simply Supported Immovable Circular Plate
edge of the plate,
upper surface
4.1.2 Case 2: Simply Supported Immovable Circular Plate
edge of the plate,
upper surface
Displacement Boundary Conditions:
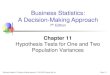
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
edge of the plate,
upper surface
Displacement Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
edge of the plate,
upper surface as shown in
Displacement Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
edge of the plate,
as shown in
Fixed
Displacement Boundary Conditions:
Force
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
edge of the plate, , as shown in
Fixed
Displacement Boundary Conditions:
Force
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
as shown in
Fixed
Figure
Displacement Boundary Conditions:
Force Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
as shown in Figure
Figure
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
Figure
Figure 4.1
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
Figure 4
1: Case 1: Fully Clamped Circular Plate
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
4.2. The boundary conditi
: Case 1: Fully Clamped Circular Plate
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
. The boundary conditi
: Case 1: Fully Clamped Circular Plate
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
. The boundary conditi
: Case 1: Fully Clamped Circular Plate
Displacement Boundary Conditions:
Boundary Conditions:
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
. The boundary conditi
33
: Case 1: Fully Clamped Circular Plate
Displacement Boundary Conditions: J�V�V"
Boundary Conditions: None
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
. The boundary conditi
33
: Case 1: Fully Clamped Circular Plate
J3|�|3V�V" |None
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distrib
. The boundary conditi
: Case 1: Fully Clamped Circular Plate
3²�3²�|3²
None
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
and subjected to a uniform distributed transverse load of intensity,
. The boundary conditi
: Case 1: Fully Clamped Circular Plate
� == 0
²� =
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
. The boundary conditions are expressed in equation (4
: Case 1: Fully Clamped Circular Plate
0;0
= 0
4.1.2 Case 2: Simply Supported Immovable Circular Plate
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
: Case 1: Fully Clamped Circular Plate
; J;
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
: Case 1: Fully Clamped Circular Plate
J3|3V�V"
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
: Case 1: Fully Clamped Circular Plate
3²¬
V�V" |3
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
: Case 1: Fully Clamped Circular Plate
= 0
3²¬
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
0
= 0
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
0
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity,
ons are expressed in equation (4
Case 2 is a simply supported immovable circular plate with the support located at the
uted transverse load of intensity, �, on its
ons are expressed in equation (4.2).
(4
Case 2 is a simply supported immovable circular plate with the support located at the
, on its
.2).
4.1)
Case 2 is a simply supported immovable circular plate with the support located at the
, on its
)
Case 2 is a simply supported immovable circular plate with the support located at the
, on its

Simply Supported Immovable
4.1.3 Cas
distance,
uniform dist
Figure 4
rℎ
Simply Supported Immovable
4.1.3 Cas
distance,
uniform dist
Figure 4
ℎ signifies the functions that describe the displ
Simply Supported Immovable
4.1.3 Cas
distance,
uniform dist
Figure 4
signifies the functions that describe the displ
Simply Supported Immovable
Displacement Boundary Conditions:
4.1.3 Case 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
distance, uniform dist
Figure 4.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
Displacement Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
, with an overhang that has a free edge at the radial distance,
uniform distributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
Figure
Displacement Boundary Conditions:
Force
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
Figure
Displacement Boundary Conditions:
Force
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
Figure 4
Displacement Boundary Conditions:
Force
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
4.2: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
Simply Supported Immovable
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity,
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
ributed load of intensity, �.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
�, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions:
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
34
: Case 2: Simply Supported
Displacement Boundary Conditions:
Boundary Conditions: Fe 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displ
34
: Case 2: Simply Supported
J3|�|V�V"F3 Ò|e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
signifies the functions that describe the displacement and force in the overhang region
: Case 2: Simply Supported Immovable Circular Plate|3²�3²�V� |3²Ò|3²�
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular Plate
� =� =²¬ =
Ò � =e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular Plate= 0= 0
= 0Ò = 0
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular Plate; J
0
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular PlateJ3|3
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular Plate
3²¬
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation
acement and force in the overhang region
Immovable Circular Plate
¬ =
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance,
, on its upper surface within the support
.3. The boundary conditions for Case 3 are shown in equation (4.3
acement and force in the overhang region
Immovable Circular Plate0
e 3: Simply Supported Immovable Circular Plate with Overhang
Case 3 is a simply supported immovable plate with the support located at the radial
with an overhang that has a free edge at the radial distance, �, and subjected to a
, on its upper surface within the support
3) where the subscript
acement and force in the overhang region
Immovable Circular Plate
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
, on its upper surface within the support
where the subscript
acement and force in the overhang region
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
, on its upper surface within the support as shown in
where the subscript
acement and force in the overhang region
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
as shown in
where the subscript
acement and force in the overhang region
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
as shown in
where the subscript
acement and force in the overhang region
(4
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
as shown in
where the subscript
acement and force in the overhang region
4.2)
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
as shown in
where the subscript
acement and force in the overhang region
)
Case 3 is a simply supported immovable plate with the support located at the radial
, and subjected to a
as shown in
where the subscript
acement and force in the overhang region

Simply Supported Immovable
support to the free edge;
edge;
transverse
Simply Supported Immovable
<support to the free edge;
edge;
transverse
Simply Supported Immovable
" ≤support to the free edge;
edge; Ftransverse
Simply Supported Immovable
≤ �. Therefore,
support to the free edge;
F3KLtransverse shearing force from the edge of the support to the free edge.
Figure
Simply Supported Immovable
. Therefore,
support to the free edge;
L is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Figure
Simply Supported Immovable
. Therefore,
support to the free edge;
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Figure 4.
Simply Supported Immovable
. Therefore,
support to the free edge;
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
.3: Case 3: Simply Supported
Simply Supported Immovable
. Therefore, �support to the free edge;
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
Simply Supported Immovable
�KLsupport to the free edge; J3K
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
Simply Supported Immovable
L can be described as the transverse displacement from the edge of the
3KL is the in
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
Simply Supported Immovable
can be described as the transverse displacement from the edge of the
is the in
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
can be described as the transverse displacement from the edge of the
is the in
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
can be described as the transverse displacement from the edge of the
is the in-plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported
35
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
: Case 3: Simply Supported Immovable Circular Plate with Overhang
35
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
shearing force from the edge of the support to the free edge.
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the moment from the edge of the support to the free edge; and I3K
Immovable Circular Plate with Overhang
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
3KL is the
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free
is the
can be described as the transverse displacement from the edge of the
plane displacement from the edge of the support to the free

36
Displacement Boundary Conditions: J3|3²� = 0; J3|3²¬ = 0
J3KL|3²� = J3|3²�
�|3²� = 0
�KL|3²� = �|3²�
ÒV�V" Ó3²¬ = 0 V�V" Ó3²� = V�KLV" Ó3²�
Force Boundary Conditions: F3 Ò|3²� = F3KL Ò|3²�
F3KL Ò|3²N = 0
I3KL Ò|3²N = 0
(4.3)
4.2 Shape Functions
The exact linear solution of the transverse displacement from the linear theory for each
case can be found by solving the governing equation in (4.4).
B .." 1" .." �" .�(")." �¡ = � (4.4)
In equation (4.4), B is the plate bending rigidity and � is a uniform distributed transverse load.
For Case 1 and 2, the shape of the transverse displacement from the exact linear solution
is used as a shape function in the assumed displacement functions. For case 3, the exact linear
solution for the transverse displacement is used as a shape function. The exact linear solution for
Case 3 is derived in Appendix C. The in-plane shape functions are assumed so that the functions
satisfied the boundary conditions. The shape functions used for each case are presented in
equations (4.5) through (4.7).

37
Displacement Shape Functions for Case 1
>A = �1 − p"q(�(
>? = " �1 − p"q(�
(4.5)
Displacement Shape Functions for Case 2
>A = �1 − p"q(� �5 + 1 + − p"q(� >? = " p1 − "q
(4.6)
Displacement Shape Functions for Case 3
>A = ��"#64B + �(Õ(( − 1) − 2�(( + 1)Ö"(32B�(( + 1)− �#Õ−2(( − 1) − 3�(( + 1)Ö"(64�(( + 1)B �
>A×Ø = ��#( − 1)"#32B�((1 + ) + �#Õ((1 − ) + 2ln()�(( + 1)Ö32B�(( + 1) − �#ln(")16B �
>? = " p1 − "q
>?×Ø = p1 − "q
(4.7)
4.3 Trial Functions for Ritz Method
There are two sets of trial functions chosen for each case. One set includes only one
unknown coefficient for transverse displacement and two unknown coefficients for the in-plane
displacements. The other set has two unknown coefficients for transverse displacement and three
unknown coefficients for in-plane displacement. The in-plane displacement has one more
unknown coefficient for accuracy. From here on, the trial functions with one unknown

38
coefficient for the transverse displacement will be known as the “current study” which is shown
in equations (4.8) – (4.10).
Current Study Trial Functions for Case 1
� = �1 − p"q(�( (S¬) J3 = " �1 − p"q(� ��¬ + p"q( �1�
(4.8)
Current Study Trial Functions for Case 2
� = �1 − p"q(� �5 + 1 + − p"q(� (S¬) J3 = " p1 − "q ��¬ + p"q( �1�
(4.9)
Current Study Trial Functions Case 3
� = ��"#64B + �(Õ(( − 1) − 2�(( + 1)Ö"(32B�(( + 1)− �#Õ−2(( − 1) − 3�(( + 1)Ö"(64�(( + 1)B � (S¬) �KL = ��#( − 1)"#32B�((1 + ) + �#Õ((1 − ) + 2ln()�(( + 1)Ö32B�(( + 1) − �#ln(")16B � (S¬)
J3 = " p1 − "q ��¬ + p"q( �1�
J3KL = p1 − "q ��¬ + p"q( �1�
(4.10)
The trial functions for the transverse displacement with two coefficients is used to
examine the accuracy of the current study and the comparison can be found in section 4.5.3. The
trial functions with two coefficients for each case are shown in equations (4.11) – (4.13).

39
Two Coefficient Trial Functions for Case 1
� = �1 − p"q(�( (S¬ + S1 p"q() J3 = " �1 − p"q(� ��¬ + p"q( �1 + p"q# �(�
(4.11)
Two Coefficient Trial Functions for Case 2
� = �1 − p"q(� �5 + 1 + − p"q(� �S¬ + S1 p"q(�
J3 = " p1 − "q ��¬ + p"q( �1+p"q# �(�
(4.12)
Two Coefficient Trial Functions Case 3
� = ��"#64B + �(Õ(( − 1) − 2�(( + 1)Ö"(32B�(( + 1)− �#Õ−2(( − 1) − 3�(( + 1)Ö"(64�(( + 1)B � �S¬ + S1 p"q(�
�KL = ��#( − 1)"#32B�((1 + ) + �#Õ((1 − ) + 2 ln() �(( + 1)Ö32B�(( + 1) − �# ln(")16B � �S¬+ S1 p"q(�
J3 = " p1 − "q ��¬ + p"q( �1 + p"q# �(�
J3KL = p1 − "q ��¬ + p"q( �1 + p"q# �(�
(4.13)
4.4 Computer implementation
The main part of this study is to explore the application of Groebner basis methodology
in an analysis of nonlinear circular plate problems. The Maple software package is used in each
case study to implement the Groebner basis calculation which converts a set of coupled
polynomial algebraic equations into an equivalent set of uncoupled polynomial algebraic

40
equations. The methodology will provide analytical solutions to the problems. The following
section describes how to find the analytical solutions for the current study with Maple.
4.4.1 Maple 13
An example of a working Maple file to solve Case 1 using the methodology presented
can be found in Appendix D. The first line initialize the worksheet with the command
“with(Groebner)” that allows the subroutines associated with Groebner basis to be open. The
next line is used to display the total potential energy function. The capital letters associated with
the differentials, “Diff”, and integrations, “Int” tell the program not to evaluate, which provides a
convent way to check the equations to reduce errors. The detailed explanations and comments for
the process can be found in Appendix D as well.
The Maple 13 command “Basis” is used to find the reduced Groebner basis for a fixed
monomial order. If an elimination order is specified with “lexdeg”, the “Basis” converts the set
of coupled polynomial equations into a set of uncoupled ones in which the first equation contains
only one variable. If the first equation can be solved analytically, then the subsequent equations
can be solved by substituted back into the remaining equations to find all other unknowns. After
the unknown coefficients are solved, they can be substituted back into the displacement functions.
One of the advantages of finding the solution symbolically in Maple is that the fully symbolic
solutions make the parametric studies much easier than the numerical solutions.
The example presented in Appendix D shows how the Ritz method was implemented in
conjunction with the trial functions for case 1 in equation (4.8), to determine the approximate
result of the geometrically nonlinear circular plate analysis. ��S0, ���0, �.���1 are from
taking the derivatives of the total potential energy function (3.36) with respect to the unknown
Ritz coefficients. Equation (4.14) is the resulting system of equations which are coupled and
nonlinear.

41
��S0 = − ¨315(( ( − 1) (384��S¬* + 84��S¬(�1 + �1 − �¬ + 3 �¬)+ 560��*S¬ + 105�#( ( − 1)) ���0 = − 2¨��15( ( − 1) p(3 − 1)S¬( + 5(�1 + 2�¬)q
���1 = − 2¨��15( ( − 1) p(1 + )S¬( + 4�1 + 5�¬q
(4.14)
The application of Groebner basis methodology can be seen when using the “Basis” function on
��S0, ���0, �.���1 from the Ritz method. The output equations called reduced Groebner
bases in (4.15) contain 3 equations which are much easier to determine the unknown coefficients
since the first equation, C�»1¼ is uncoupled with only one unknown, S¬, which can be solved
symbolically. Since C�»2¼ and C�»3¼ are in terms of S¬ and only one other unknown, �¬ or �1,
the unknowns can be solved symbolically as well.
C�»1¼ = 525�#(1 − () − 2800��*S¬ + 32��(14 ( − 21 − 39)S¬*
C�»2¼ = 15�¬ + (7 − 9)S¬(
C�»3¼ = 3�1 + (3 − )S¬(
(4.15)
In summary, this is the way Groebner basis is utilized in the current study. The Ritz
method produces a system of equations that are coupled and nonlinear, such as equation (4.14).
The calculation of Groebner basis generates a system of equations that are uncoupled and
solvable, such as equation (4.15). Case 2 and 3 are presented in Appendix F.
4.4.2 ANSYS 13
ANSYS 13 (Mechanical APDL) [40] is used to check the validity of the solutions found
by the current study. Shell93 elements are used for the simulation since they have large
deflection capabilities. A quarter model of the circular plate is used to complete all the analyses.
The quarter plate model has symmetric boundary conditions applied to the two inside edges and

42
boundary conditions applied based on which case is being analyzed. Figure 4.4 shows the
boundary conditions applied to the model.
Figure 4.4: Boundary Conditions of Finite Element Quarter Plate Model for Each Case Study
where ÊÜF stands for symmetric boundary condition, ˾Ý�B stands for fixed boundary
condition, and ÊÊ stands for simply supported immovable boundary condition. Before
performing all of the analyses, a convergence study was conducted to determine the amount of
elements needed. A steel circular plate with a radius of 10 inches and a thickness of 0.1 inches
was selected to run the convergence study. Figure 4.5 presents the results from the convergence
study for Case 1:
Case 1 Case 2 Case 3

43
Figure 4.5: Convergence Study for Case 1 (� = 5���, ν = 0.3 , � = 29� + 6���, = 10��, and � = 0.1��)
where ���� is the maximum displacement at the center of the plate. Adding more than 500
elements to the finite element model did not change the results with any significance. Therefore,
583 elements are used in the quarter plate model to conduct the validations and comparisons for
Case 1 and 2. A plot of the element mesh density for Case 1 and 2 is shown in Figure 4.6.
� ��� (��oℎ
��)
4
Total Number of Elements in Finite Element Model

the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
apply the in
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
apply the in
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
apply the in
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
apply the in
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
apply the in-plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
analysis, which is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Figure
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Figure
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Figure 4.6
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
6: Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
Appendix E. The first portion of the log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
44
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
44
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary condition
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Mesh of Finite Element Model
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
plane, transverse, and symmetric boundary conditions as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of comman
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
using the CLY4 command to create a quarter segment of a circle. The next set of commands was
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
ds was
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
ds was
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The
Log files were created for each of the three cases presented in this thesis. An example of
the simply supported immovable circular plate with overhang (Case 3) log file is presented in
log file is to develop and start the preprocessor with a
/PREP7 command. The preprocessor section is where the element data, material properties,
mesh, and geometry are entered. The ET command selects the type of element to be used in the
is SHELL93 as indicated by the third parameter of the ET command. Then, the
material data was inputted using the MPDATA commands. The plate geometry was generated by
ds was
used to mesh the plate. ANSYS has an automesh option which allowed a mesh to be generated
automatically in the model. The boundary conditions were applied by using the DL commands to
s as seen in Appendix E.
Afterwards, the pressure load was applied to the area inside of the support on the plate. The

45
analysis type is setup to solve using large displacement assumptions. The "SOLVE" command
runs the ANSYS solver to complete the finite element simulation.
The last portion of the log file is post processing. All the analyses ran for this validation
outputted contour plots for in-plane displacements, transverse displacements, and stresses. In
addition, the /OUTPUT command generated text files which was used to gather results for in-
plane displacement, transverse displacement and stresses on the nodes. Also, the element and
nodal data were outputted so that they could be used to plot the ANSYS solution with the current
study.
4.5 Validation of Current Study
ANSYS, a commonly used finite element software package is utilized as a tool to
validate the results from the current study. In the following sections, the validation study will
show that the current procedure is of great value in generating closed form solutions compared to
the numerical solutions from ANSYS.
4.5.1 Validation of Shape Functions
The first check is to verify the shape functions. The shape functions are verified by
plotting the displacement with respect to the radial distance to insure the assumed shape functions
are accurate assumptions. The transverse displacement from the current study is shown on the
same figure as the ANSYS solution and the exact solution from the linear theory which allowed
for comparison of results. Figure 4.7 through Figure 4.9 show the transverse displacement for
each case. “Linear Theory” in all table and figures represents the exact solution based on the
linear theory. The load condition was given a magnitude in which the circular plate would be
subjected to geometrically nonlinear displacements. The same load and material properties were
used for each case and the magnitude of the transverse displacement for Case 1, 2 and 3 are
respectively 1.39�, 1.9� and 1.9�. The results in Figure 4.7 – 4.9 show that the transverse

46
displacement of the current study with one Ritz coefficient agrees with the ANSYS solution with
a fine mesh. The ANSYS solution for Case 1 and 2 had 583 elements and for Case 3 had 1154
elements due to the addition of the overhang which created additional elements. As expected
when the plate is subjected to large displacement the linear solution does not agree with the
current study nor the ANSYS results, the maximum displacement at the center of the plate for the
exact linear solution is over two times larger for Case 1, six times larger for Case 2 and five times
larger for Case 3 than the results from the current study and ANSYS solution. Therefore, the
exact linear solution assumptions are no longer accurate for those cases. However, in Appendix
D on page 126 when the plate is subject to small displacements pAÞßàT < 0.5q the transverse
displacement for the exact linear solution agree with the current study and the ANSYS solution.
Figure 4.7: Case 1: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 , � = 29� + 6���, and �/ = 1/100)"/
� ���/�
ANSYS
Current Study
Linear Theory

47
Figure 4.8: Case 2: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 , � = 29� + 6���, and �/ = 1/100)
"/
� ���/�
ANSYS
Current Study
Linear Theory

48
Figure 4.9: Case 3: Transverse Displacement versus Radial Distance (� = 5���, ν = 0.3 , � = 29� + 6���, �/ = 1.5, and �/ = 1/100)
Figures 4.10 – 4.12 show the radial stress, <33, with respect to the radial distance of the
plate for Case 1, Case 2 and Case 3, respectively. The same loading conditions used for the
transverse displacement are used for the radial stress figures as well. The results in Figures 4.10
– 4.12 show that the radial stress of the current study with one Ritz coefficient agrees with the
ANSYS solution. Similarly to the transverse displacement solution when the plate is subjected to
large displacement, the exact linear solution does not agree with the current study nor the ANSYS
results, the radial stress at the center of the plate for the exact linear solution is over 1.5 times
larger for Case 1, three times larger for Case 2 and 2.5 times larger for Case 3 than the current
study and ANSYS result. Therefore, the exact linear solution assumptions are no longer accurate
"/
� ���/�
ANSYS
Current Study
Linear Theory

49
for stress as well. However, in Appendix D on page 128 when the plate is subject to small
displacements pAÞßàT < 0.5q the radial stress for the exact linear solution agree with the current
study and the ANSYS solution.
Figure 4.10: Case 1: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , and �/ = 1/100)
ANSYS
Current Study
Linear Theory
< 33/<33 Þß
à
"/

50
Figure 4.11: Case 2: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , and �/ = 1/100)
< 33/<33 Þß
à
"/
ANSYS
Current Study
Linear Theory

51
Figure 4.12: Case 3: Radial Stress versus the Radial Distance of the Plate (� = 5���, ν = 0.3 , � = 29� + 6��� , �/ = 1.5 and �/ = 1/100)
Case 3 has one anomaly at the free edge where the radial stress should be equal to zero.
This is due to the fact that we did not enforce the natural boundary condition at that point.
However, it is acceptable because the energy method is minimized over an integration and not at
every single point. In summary, Figures 4.7 to 4.12 show that the transverse displacement and
radial stress results from the current study with one coefficient matched the results of the ANSYS
solution accurately. Therefore, the assumed shape functions used for the current study are
deemed acceptable because they provided an accurate match against the ANSYS solution for
each case.
< 33/<33 Þß
à
"/
ANSYS
Current Study
Linear Theory

52
4.5.2 Validation with Load
The next check for the current study is to check the accuracy compared to the ANSYS
and exact linear solution with different loading. In the Tables 4.1 to 4.3, the non-dimensional
transverse displacement is given for the current study, the ANSYS solution, and the exact linear
solution. The displacement conditions are based on the parameters that would make the current
study AÞßàT equal to a certain value for the current study. The same parameters are then used in
the ANSYS and exact linear solutions to develop a difference between the current study, ANSYS
and the exact linear solution. Then, the percentage error is shown to give the accuracy of the
current study to ANSYS and the current study to the exact linear solution. Table 4.1 shows the
comparison of results for Case 1, Table 4.2 shows the comparison results for Case 2 and Table
4.3 shows the comparison results for Case 3.
Table 4.1: Case 1: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100 and = 0.3)
âã(äågæ) çèéêë % Error in
çèéêë
CS LT ANSYS %ãííîí = ïð − ñòñò %ãííîí = ïð − óôðõðóôðõð
3.299 0.5 0.563 0.496 11.1% 0.8%
4.154 0.6 0.709 0.594 15.3% 1.0%
5.114 0.7 0.873 0.691 19.7% 1.2%
6.199 0.8 1.058 0.790 24.4% 1.3%
7.425 0.9 1.267 0.883 28.9% 1.8%
8.811 1.0 1.503 0.979 33.5% 2.0%
10.373 1.1 1.770 1.075 37.9% 2.3%
12.130 1.2 2.070 1.171 42.0% 2.4%
14.100 1.3 2.406 1.270 46.0% 2.3%
16.300 1.4 2.781 1.357 50.0% 3.0%
18.747 1.5 3.199 1.451 53.1% 3.3%
CS = Current Study, LT = Exact Solution from Linear Theory, and ANSYS = ANSYS Solution

53
Table 4.2: Case 2: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100 and = 0.3)
âã(äågæ) çèéêë % Error in
çèéêë
CS LT ANSYS %ãííîí = ïð − ñòñò %ãííîí = ïð − óôðõðóôðõð
3.299 0.5 0.732 0.496 31.7% 0.78%
4.154 0.6 1.001 0.594 40.1% 0.97%
5.114 0.7 1.338 0.695 47.7% 0.74%
6.199 0.8 1.752 0.786 54.3% 1.71%
7.425 0.9 2.255 0.883 60.1% 1.80%
8.811 1.0 2.858 0.975 65.0% 2.46%
10.373 1.1 3.573 1.070 69.2% 2.74%
12.130 1.2 4.411 1.166 72.8% 2.78%
14.100 1.3 5.382 1.254 75.9% 3.52%
16.300 1.4 6.499 1.347 78.5% 3.77%
18.747 1.5 7.771 1.442 80.7% 3.89%
CS = Current Study, LT = Exact Solution from Linear Theory, and ANSYS = ANSYS Solution

54
Table 4.3: Case 3: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100, �/ = 1.5, and = 0.3)
âã(äågæ) çèéêë % Error in
çèéêë
CS LT ANSYS %ãííîí = ïð − ñòñò %ãííîí = ïð − óôðõðóôðõð
3.299 0.5 0.618 0.481 19.05% 3.76%
4.154 0.6 0.844 0.581 28.90% 3.10%
5.114 0.7 1.126 0.683 37.83% 2.48%
6.199 0.8 1.473 0.784 45.70% 1.95%
7.425 0.9 1.895 0.885 52.51% 1.72%
8.811 1.0 2.401 0.985 58.35% 1.52%
10.373 1.1 3.000 1.086 63.33% 1.26%
12.130 1.2 3.701 1.182 67.58% 1.50%
14.100 1.3 4.515 1.279 71.21% 1.58%
16.300 1.4 5.450 1.377 74.31% 1.66%
18.747 1.5 6.515 1.474 76.97% 1.71%
CS = Current Study, LT = Exact Solution from Linear Theory, and ANSYS = ANSYS Solution
The results from Table 4.1 – 4.3 show that the current study with only one Ritz
coefficient matches the ANSYS solution. The largest error between the current study and the
ANSYS solution is less than 4% when the maximum transverse displacement is 0.5 < AÞßàT ≤1.5. This proves that the results presented are accurate. When comparing to the current study to
the linear solution, it is shown that the linear solution has a large amount of error. The maximum
error seen when the maximum transverse displacement is 0.5 < AÞßàT ≤ 1.5 is 80.7%. Therefore,
it can also be shown that the exact linear solution will be inaccurate when the plate is subjected to
large displacement.

55
4.5.3 Current Study Solution versus Two Coefficient Ritz Solution
The final validation study is to determine the difference in accuracy achieved by adding
another coefficient to the assumed displacement functions. Equations (4.11) to (4.14) were used
for the two coefficient Ritz solutions. Tables 4.4 to 4.6 show the percentage difference between
the two coefficient solution versus ANSYS and the two coefficient solution versus the current
study with one coefficient for all three cases. The displacement conditions were based on the
parameters that would make the current study AÞßàT equal to a certain value. The same parameters
were used in the ANSYS and two coefficient Ritz solution to develop a difference between the
current study and the two different solutions. Table 4.4 shows the comparison results for Case 1,
Table 4.5 shows the comparison results for Case 2 and Table 4.6 shows the comparison results for
Case 3.
Table 4.4: Case 1: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100 and = 0.3)
âã(äågæ) çèéêë % Error in
çèéêë
TCS CS ANSYS %ãííîí = òïð − ïðòïð %ãííîí = òïð − óôðõðóôðõð
3.299 0.493 0.5 0.496 1.52% 0.70%
4.154 0.589 0.6 0.594 1.93% 0.90%
5.114 0.684 0.7 0.691 2.31% 0.98%
6.199 0.779 0.8 0.790 2.65% 1.35%
7.425 0.874 0.9 0.883 2.96% 1.00%
8.811 0.969 1.0 0.979 3.24% 1.06%
10.373 1.063 1.1 1.075 3.50% 1.13%
12.130 1.157 1.2 1.171 3.75% 1.22%
14.100 1.250 1.3 1.270 3.98% 1.56%
16.300 1.343 1.4 1.357 4.22% 1.01%
18.747 1.436 1.5 1.451 4.45% 1.03%
CS = Current Study, TCS = Two Coefficient Ritz Method Solution, and ANSYS = ANSYS Solution

56
Table 4.5: Case 2: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100 and = 0.3) âã(äågæ)
çèéêë % Error in çèéêë
TCS CS ANSYS %ãííîí = òïð − ïðòïð %ãííîí = òïð − óôðõðóôðõð
1.053 0.497 0.5 0.496 0.51% 0.27%
1.440 0.596 0.6 0.594 0.70% 0.27%
1.923 0.694 0.7 0.695 0.92% 0.16%
2.518 0.791 0.8 0.786 1.15% 0.57%
3.241 0.887 0.9 0.883 1.41% 0.42%
4.109 0.984 1.0 0.975 1.67% 0.83%
5.137 1.079 1.1 1.070 1.96% 0.83%
6.341 1.174 1.2 1.166 2.24% 0.60%
7.737 1.268 1.3 1.254 2.54% 1.06%
9.342 1.361 1.4 1.347 2.84% 1.04%
11.171 1.454 1.5 1.442 3.14% 0.87%
CS = Current Study, TCS = Two Coefficient Ritz Method Solution, and ANSYS = ANSYS Solution

57
Table 4.6: Case 3: Dimensionless AÞßàT versus Dimensionless Load
ái and % Error in AÞßàT
(�/ = 1/100, �/ = 1.5, and = 0.3)
âã(äågæ) çèéêë % Error in
çèéêë
TCS CS ANSYS %ãííîí = òïð − ïðòïð %ãííîí = òïð − óôðõðóôðõð
1.041 0.473 0.5 0.481 5.72% 1.74%
1.422 0.575 0.6 0.581 4.41% 1.17%
1.897 0.677 0.7 0.683 3.42% 0.85%
2.482 0.779 0.8 0.784 2.67% 0.67%
3.193 0.881 0.9 0.885 2.11% 0.36%
4.045 0.983 1.0 0.985 1.68% 0.14%
5.054 1.085 1.1 1.086 1.35% 0.07%
6.236 1.187 1.2 1.182 1.09% 0.43%
7.607 1.289 1.3 1.279 0.89% 0.71%
9.181 1.390 1.4 1.377 0.72% 0.95%
10.976 1.491 1.5 1.474 0.60% 1.13%
CS = Current Study, TCS = Two Coefficient Ritz Method Solution, and ANSYS = ANSYS Solution
As expected, adding the 2nd unknown coefficient provided more accurate results;
however, adding the 2nd unknown coefficient made the solution not solvable analytically because
the computed Groebner basis system of equations had a polynomial of degree order 9 which is
unable to be solved analytically. This is one of the limitations of this method, since it is shown in
the Abel-Ruffini impossibility theorem that there is no closed form solution for a polynomial of
degree order 5 or higher. The current study with one Ritz coefficient is still deemed acceptable,
because even though the answer (~4% different) is slightly conservative it is much more accurate
than the exact linear solution (~80% different) and there is still a closed form solution.

58
CHAPTER 5
RESULTS AND DISCUSSION
This chapter presents the results of each case study provided in section 4.1. The sections
in this chapter are organized by each individual case. And each section begins by presenting the
closed form solutions for the transverse displacement, stresses in the radial and theta directions,
moments, and shearing force generated from the current study. Once the closed form solutions
for the transverse and in-plane displacements functions are determined, the moments, shearing
force, and stresses can easily be calculated symbolically in terms of the structural parameters such
as material properties and plate geometry, which are also presented in each section. In addition,
the results from the parametric study for each case are plotted in Figures 5.1 to 5.15 and some
additional plots are in Appendix G.
5.1 Results for Fully Clamped Circular Plate (Case 1)
The closed form solution for the transverse displacement, � in terms of structural
parameters such as plate geometry and material properties is presented in equation (5.1). The
maximum displacement ���� at the center of the plate is shown in equation (5.1) as well. The
additional variables /, 0, :, 2 and 8 in equations (5.1) to (5.6) are used to simplify the
expressions of transverse displacement, moments, shearing force, and stresses which are provided
in equation (5.7).
� = �1 − "((�(ö5251*/1*12Etβ + 2(525)(*Et*3α1* û
�Ò|3²¬ = ���� = ö5251*/1*12Etβ + 2(525)(*Et*3α1* û (5.1)

59
Equation (5.2) presents the closed form solution of the radial moment, F33 the moment at
the support F33 Ò|3²�, and the moment at the center F33 Ò|3²¬. The maximum moment is at the
edge and is used in Figure 5.4 to develop a profile for the moment F33.
F33 = −Bü8"(# : − 4(1 + ) �1 − "((�( :ý
F33 Ò|3²¬ = B �4(1 + )( :�
F33 Ò|3²� = F33_��� = −B 8( :
(5.2)
Equation (5.3) presents the closed form solution of the moment in the 5 direction, F44
the moment at the support F44 Ò|3²�, and the moment at the center F44 Ò|3²¬.
F44 = −Bü 8"(# : − 4(1 + ) �1 − "((�( :ý
F44 Ò|3²¬ = F44_��� = B �4(1 + )( :�
F44 Ò|3²� = −B 8 ( :
(5.3)
Equation (5.4) presents the closed form solution of the transverse shearing force, I3 and
the transverse shearing force at the edge I3 Ò|3²�.
I3 = 32"# :
I3 Ò|3²� = Q��� = 32* :
(5.4)

60
In Equation (5.5) the closed form solution for the radial stress <33 and the stress in the
theta direction <44 are expressed in two terms. The terms with � are due to bending effects and
the rest is affected by in-plane displacement.
<33 = �1 − ( ���−�ü8"(# : − 4(1 + ) �1 − "((�( :ý − 2"(* �8 + 2 "((�
+ 2"(* �1 − "((� 2 + (1 + ) �8 + 2 �"((�� �1 − "((�+ 8:("( �1 − "((�(# �
�
<44 = �1 − (����−�ü8 "(# : − 4(1 + ) �1 − "((�( :ý + 8 "( �1 − "((�(# :(
+ (1 + ) �1 − "((� �8 + 2 �"((�� + 2 "(* �2 − 8 − 22"(( ����
(5.5)
The stresses at the support <33 Ò|3²� and at the center of the plate <33 Ò|3²¬ are presented in
equation (5.6). In equation (5.6), the maximum stress is at the edge when a uniform loading is
applied. This maximum stress is used to non-dimensionalize the stresses at the top, bottom and
middle plane shown in Figure 5.6.
<33 Ò|3²¬ = �1 − ( �4�(1 + )( : − (1 + )8 �
<33 Ò|3²� = <��� = �1 − ( �−8�( : − 2(2 + 8) � (5.6)

61
The additional variables /, 0, :, 2 and 8 appeared in equations (5.1) – (5.6) above are
given as follows.
/ = �(�(0( ö−27�#(1 − ()+�−268800��(0 + 729�((1 − ()(û
0 = −39 − 21 + 14 (
: = ö5251*/1*12Etβ + 2(525)(*Et*3α1* û
2 = :( − 33
8 = :( 9 − 7 15
(5.7)
Figure 5.1 shows how a non-dimensional displacement AÞßàT versus load
á�Ti varies with
Poisson’s ratio for Case 1. In the figure, the exact solutions from the linear theory, hereon
denoted as “Linear Theory” in all figures, are plotted with the solutions from the current study.
The results show that Poisson’s ratio does not have much effect on the maximum displacement
for the given load for both linear and nonlinear solutions. However, it is clearly shown that the
prediction based on the linear theory is only accurate when AÞßàT is less than 0.5, which is
expected.

62
Figure 5.1: Case 1: Dimensionless Displacement versus Dimensionless Load varying Poisson’s
Ratio,
Figure 5.2 presents a parametric study how the geometry properties of the plate affect the
displacement for Case 1. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as T� increases, the dimensionless displacement,
AÞßàT decreases. Additionally, the differences between the solutions of linear and nonlinear are
reduced for a given load.
� ���/�
�#/(�#�)
Current Study
Linear Theory

Figure
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements
Figure
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements
� ���/�
Figure 5
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements
� ���/�
5.2: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
displacements AÞßàT
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
Þßà <
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
< 0
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
0.5. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
Figure 5.3 and 5.4 present
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
Figure 5.3 and 5.4 present a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonl
63
: Case 1: Dimensionless Transverse Displac
Thickness Ratio,
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
. Therefore, the nonlinear analysis for these cases is necessary.
�/
63
: Case 1: Dimensionless Transverse Displac
Thickness Ratio, �/
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
/� (10E
: Case 1: Dimensionless Transverse Displacement versus Dimensionless Load varying (!
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
(10E
ement versus Dimensionless Load varying ! =
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
(10E-6)
ement versus Dimensionless Load varying = 0.3
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
6)
Current Study
Lin
ement versus Dimensionless Load varying 3)
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
Current Study
Linear Theory
ement versus Dimensionless Load varying
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
Current Study
ear Theory
ement versus Dimensionless Load varying
a parametric study of the displacement
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
Current Study
ear Theory
ement versus Dimensionless Load varying
a parametric study of the displacement A
and moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
Current Study
ear Theory
ement versus Dimensionless Load varying
AÞßàTand moment at the center and at the edge of the plate respectively for Case 1.
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
ement versus Dimensionless Load varying
Þßà versus the stress
and moment at the center and at the edge of the plate respectively for Case 1. The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
ement versus Dimensionless Load varying
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
ement versus Dimensionless Load varying
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
ement versus Dimensionless Load varying
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
inear analysis for these cases is necessary.
ement versus Dimensionless Load varying
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
ement versus Dimensionless Load varying
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the
versus the stress
The figures show
that the displacement has a large effect on the stresses and moments. Again, the stresses and
moments calculated based on linear and nonlinear theory have no difference only for the

Figure
< 33(/(��(
)
Figure
< 33(/(��(
)
Figure 5..3: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse : Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
64
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
�
Current Study
Linear Theory
64
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
����
Current Study
Linear Theory
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance "/���/�
Current Study
Linear Theory
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse / (
�
Current Study
Linear Theory
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
( =: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse = 0: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse 0.3 and
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
and
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
and � =: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse = �/: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse /2)
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
: Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse : Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse : Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse : Case 1: Dimensionless Radial Stress versus Dimensionless Maximum Transverse

moment
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
Figure
moment
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
F 33( /(��
# )
Figure
moment
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
F 33( /(��
# )
Figure 5
Since the results for the stress and moments are expressed symbolically, the profile of the
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
F 33( /(��
# )
5.4: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
s in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
s in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
s in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
s in the radial "middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
" and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
and 5middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
5 direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
( Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
65
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement = 0Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
�
65
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement 0.3)
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
����: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
)
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
���/t
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
/t: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6. The given load is indicated in the caption of Figure 5.5 and 5.6.
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6.
Current Study
Linear Theory
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6.
Current Study
Linear Theory
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6.
Current Study
Linear Theory
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.5 and 5.6.
Current Study
Linear Theory
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
Current Study
Linear Theory
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
Figure
: Case 1: Dimensionless Moment versus Dimensionless Transverse Displacement
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
Figure
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
Figure

66
Figure 5.5: Case 1: Moment Profile (�#/(��#) = 500/29 and = 0.3)
F/F ���
"/
F33/F33_��� F44/F44_���

67
Figure 5.6: Case 1: Stress Profile through the Thickness (�#/(��#) = 500/29 and = 0.3)
5.2 Results for Simply Supported Immovable Edge Circular Plate (Case 2)
The closed form solution transverse displacement function, � in terms of structural
parameters such as plate geometry and material properties is presented in equation (5.8). The
maximum displacement ���� at the center of the plate is shown in equation (5.8) as well. The
additional variables /, 0, :, 2 and 8 found in equation (5.8) – (5.14) are used to simplify the
expressions of the transverse displacement, moments, shear force, and radial stress and are given
in equation (5.15).
"/
< 33/<���
� = − �2 � = + �2 � = 0

68
� = �1 − "((��5 + 1 + − "((� :
�Ò|3²¬ = ���� = �5 + 1 + � : (5.8)
Equation (5.9) presents the closed form solution for radial moment function, F33 and the
moment at the center, F33 Ò|3²¬. Since the plate is simply supported, the moment at the edge,
F33 Ò|3²� is equal to zero. The maximum moment is at the center and is used in Figure 5.11 to
develop a profile for the moment F33.
F33 = B �4( − ")( + ")(3 + )# :�
F33 Ò|3²¬ = F33_��� = B �4(3 + )( :�
(5.9)
Equation (5.10) presents the closed form solution of the moment in the 5 direction, F44,
the moment at the center F44 Ò|3²¬ and the moment at the edge F44 Ò|3²�.
F44 = B �4((( − 3"() + 3( − "()# :�
F44 Ò|3²¬ = F44_��� = B �4(3 + )( :�
F44 Ò|3²� = B 8(1 − )( :
(5.10)
Equation (5.11) presents the closed form solution of the transverse shearing force, I3 and
the transverse shearing force at the edge I3 Ò|3²�.

69
I3 = 32"# :
I3 Ò|3²� = Q��� = 32* :
(5.11)
In Equation (5.12) the closed form solution for radial stress <33 and the stress in the theta
direction <44 are expressed in two terms. The terms with � are due to bending effects and the rest
is affected by in-plane displacement.
<33 = �1 − ( ö−� 8"(# : − 2(1 + )( : �5 + 1 + − 2"(( + 1�¡+ (1 + ) p1 − "q �8 + "(( 2� − "( �8 + "(( 2� + 2"(* 2 p1 − "q+ 12# −2": �5 + 1 + − 2"(( + 1�¡(¡
<44 = �1 − ( ö−� 8 "(# : − 2(1 + )( : �5 + 1 + − 2"(( + 1�¡+ (1 + ) p1 − "q �8 + "(( 2� − "( �8 + "(( 2� + 2 "(* 2 p1 − "q+ 2# −2": �5 + 1 + − 2"(( + 1�¡(¡
(5.12)
The stress at the support <33 Ò|3²� and at the center of the plate <33 Ò|3²¬ are presented in
equation (5.13). In equation (5.13), the maximum stress is at the edge when a uniform load is
applied. This maximum stress is used to non-dimensionalize the stresses at the top, bottom and
middle plane shown in Figure 5.10.

70
<33 Ò|3²¬ = <��� = �1 − ( �−� −2(1 + )( �5 + 1 + + 1�¡+ (1 + ) 8�
<33 Ò|3²� = �1 − ( ö−� 8( : − 2(1 + )( : �5 + 1 + − 1�¡− 1 (8 + 2) + 12# −2: �5 + 1 + − 1�¡(¡
(5.13)
The additional variables /, 0, :, 2 and 8 appeared in equations (5.8) – (5.13) above are
given as follows.
/ = �(�(0(ü9�#( ( − 1)( + 7)+ − 30 ( + 7)(( + 1)((4765967360�(�( + 7)(1 + )− 27�(0( − 1)()�1(û
0 = 6696449 � + 99521302 � + 478692103 # + 67588516 *− 6799490129 ( − 20445519770 − 14008216855
: = 279255901* öα1*(1 + ν)4Etβ + 8(279255901*)E(t#(1 + ν)(ν + 7))4Etα1* û
2 = 64:((24 * − 43 ( − 1181 − 58)5181(1 + )(
8 = −4:((17387 * + 105785 ( − 2951 − 645749)108801(1 + )(
(5.14)

71
Figure 5.7 shows how non-dimensional displacement, AÞßàT versus load
á�Ti varies with
Poisson’s ratio for Case 2. In the figure, the exact solutions from the linear theory are plotted
with the solutions from the current study. The results show that Poisson’s ratio does not have
much effect on the maximum displacement for a given load for both linear and nonlinear
solutions. However, it is clearly shown that the predictions based on the linear theory are only
accurate when AÞßàT is less than 0.5, which is expected.
Figure 5.7: Case 2: Dimensionless Transverse Displacement versus Dimensionless load varying
Poisson’s ratio,
�#/(�#�)
Current Study
Linear Theory
� ���/t

displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
Areduced for a given load.
Figure
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
AÞßàTreduced for a given load.
Figure
� ���/�
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
Þßà decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
Figure 5
� ���/�
Figure
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
5.8:
Figure
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
: Case
Figure 5.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
Case
.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
Case 2: Dimensionless Transverse Dis
.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
Dimensionless Transverse Dis
.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
reduced for a given load.
Dimensionless Transverse Dis
.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
.8 presents a param
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
.8 presents a parametric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
72
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Dis
Thickness Ratio,
�/
Current Study
Linear Theory
72
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as
decreases. In addition, the differences between the solutions of linear and nonlinear are
Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio, �//� (10E
Current Study
Linear Theory
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement at the center. The plot indicates that as T� increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying ( (10E
Current Study
Linear Theory
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying =(10E-6)
Current Study
Linear Theory
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying = 0.36)
Current Study
Linear Theory
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying 3)
Current Study
Linear Theory
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are
placement versus Dimensionless Load varying
etric study how the geometry properties of the plate affect the
displacement for Case 2. Notice that the thickness of the plate has a large effect on the maximum
displacement,
decreases. In addition, the differences between the solutions of linear and nonlinear are

2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
solution.
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
solution.
Figure
< 33(/(��(
)2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
solution.
Figure
< 33(/(��(
)Figure
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
solution.
Figure 5.
Figure
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
.9: Case 2:
Figure 5.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
: Case 2:
Displacement varying Radial Distance
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
: Case 2:
Displacement varying Radial Distance
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
: Case 2: Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
Current Study
Linear Theory
73
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
�
73
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance
����
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
Displacement varying Radial Distance "/���/�
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse / (
�
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
to the fact that the exact linear solution cannot account for in-
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
( =
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
-plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse = 0
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse 0.3 and
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
and
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
and � =
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse = �/
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is ze
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse /2)
.9 shows how the stress is affected when the displacement is increased for Case
2. Notice that the exact solution from the linear theory stress result at the edge is zero, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
.9 shows how the stress is affected when the displacement is increased for Case
ro, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
.9 shows how the stress is affected when the displacement is increased for Case
ro, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
.9 shows how the stress is affected when the displacement is increased for Case
ro, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
.9 shows how the stress is affected when the displacement is increased for Case
ro, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the
Dimensionless Radial Stress versus Dimensionless Maximum Transverse
.9 shows how the stress is affected when the displacement is increased for Case
ro, this is due
plane stress and the stress is only
due to bending. This is another condition where the linear solution cannot accurately predict the

the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
become
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
become
Figure
F 33( /(��
# )the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
becomes
Figure
F 33( /(��
# )Figure
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
s increasing
Figure 5.
F 33( /(��
# )Figure
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
increasing
.10: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
Figure 5.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
increasing
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
increasingly
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
y inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when dis
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
(
74
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
it can be shown, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ= 0�
74
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ0.3)
����
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
)
���/t
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
t
Current Study
Linear Theory
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small
inaccurate the larger the deflection becomes
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
Current Study
Linear Theory
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small
inaccurate the larger the deflection becomes.
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
Current Study
Linear Theory
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
placement is small 0.
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
Current Study
Linear Theory
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
0.5
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
Current Study
Linear Theory
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
> A
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
AÞßàT
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
Þßà is accurate and
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displ
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and
: Case 2: Dimensionless Moment versus Dimensionless Transverse Displacement
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and
acement
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and
acement
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and
acement
.10 presents a parametric study of the effect that displacement has on moment at
the center for Case 2. This figure shows that displacement has a large effect on moment. Again
is accurate and

75
Since the results for the stress and moments are expressed symbolically, the profile of the
moments in the radial " and 5 direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in Figure
5.11 and 5.12. The given load is indicated in the caption of Figure 5.11 and 5.12.
Figure 5.11: Case 2: Moment Profile (�#/(��#) = 500/29 and = 0.3)
F/F ���
"/
F33/F33_��� F44/F44_���

76
Figure 5.12: Case 2: Stress profile through the Thickness (�#/(��#) = 500/29 and = 0.3)
5.3 Results for Simply Supported Immovable Edge Circular Plate with Overhang (Case 3)
The closed form solution for the transverse displacement, � and �KL in terms of
structural parameters such as plate geometry and material properties is presented in equation
(5.15). The maximum displacement ���� at the center of the plate is shown in equation (5.15) as
well. The additional variables /, 01, 0(, :, 2 and 8 in equations (5.15) to (5.21) are used to
simplify the expressions of the transverse displacement, moment and radial stress and are given in
equation (5.22).
"/
< 33/<���
� = + �2 � = − �2 � = 0

77
� = ��"#64B + �(Õ(( − 1) − 2�(( + 1)Ö"(32B�(( + 1)− �#Õ−2(( − 1) − 3�(( + 1)Ö"(64�(( + 1)B � :
�KL = ��#( − 1)"#32B�((1 + ) + �#Õ((1 − ) + 2ln()�(( + 1)Ö32B�(( + 1) − �#ln(")16B � :
�Ò|3²¬ = ���� = −�#Õ−2(( − 1) − 3�(( + 1)Ö"(64�(( + 1)B :
(5.15)
Equation (5.16) presents the closed form solution of the radial moment, F33 the moment
for the overhang region F33KL and the moment at the center F33 Ò|3²¬. The maximum moment is
at the center and is used in Figure 5.17 to develop a profile for the moment F33.
F33 = − �:16�( Õ(3 + )"(�( − 2(1 + )(�( + ( − 1)#Ö
F33KL = �#:16"(�( (�( − "()( − 1) F33 Ò|3²¬ = F33_��� = − �:16�( (−2(1 + )(�( + ( − 1)#)
(5.16)
Equation (5.17) presents the closed form solution of the moment in the 5 direction, F44
and F44KL, the moment at the center F44 Ò|3²¬, and the moment at the edge F44 Ò|3²�.
F44 = − �:16�( (−2( �( + 3"(�( + # + "(�( − # − 2(�() F44KL = :"(�( ("( + �( − "( − �() F44 Ò|3²¬ = F44_��� = − �:16�( (−2( �( + # − # − 2(�()
F44 Ò|3²« = − �:16�( (( �( + # − (�( − #) (5.17)

78
Equation (5.18) presents the closed form solution of the transverse shearing force I3, the
transverse shearing force in the overhang region I3KL, and the transverse shearing force at the
edge I3 Ò|3²�.
I3 = −6"��*� :( ( − 1) I3KL = 0
I3 Ò|3²� = Q��� = −6��*� :( ( − 1) (5.18)
Equation (5.19) shows the closed form solution for the radial stress <33, <33KL and
Equation (5.20) the stress in the theta direction <44, <44KL. The terms with � are due to bending
effects and the rest is affected by in-plane displacement.
<33 = �1 − ( ö−� 3(3 + )4��* (1 − ()�"(+ 3(1 − ()(�4�(��* Õ(( − 1) − 2�(( + 1)Ö� :+ 1 + p1 − "q �8 + 2 "((� − "( �8 + 2 "((� + 2"(* p1 − "q 2+ 12 3�"*4��* (1 − ()+ 3(�(1 − ()"4��(�*(1 + ) Õ(( − 1) − 2�(( + 1)Ö¡( :(¡
<33KL = �1 − (ü−� �3( − 1)(1 − ()�#4�(��* + 3(1 − ()�#4��*"( � : − 1 �8 + 2 "((�+ 2"( p1 − "q 2 + 12�3( − 1)(1 − ()�#"4�((1 + )��* − 3(1 − ()�#4��*" �( :(+ p1 − "q �8 + 2 "((�" û
(5.19)

79
<44 = �1 − ( ö−� 3(3ν + 1)4��3 (1 − 2)�"2+ 3(1 − 2)2�4�2��3 p2( − 1) − 2�2( + 1)q¡ :+ 1 + p1 − "q �8 + 2 "22� − "2 �8 + 2 "22� + 2ν"23 p1 − "q 2+ ν2 3�"34��3 (1 − 2)+ 32�(1 − 2)"4��2�3(1 + ) p2( − 1) − 2�2( + 1)q¡2 :2¡
< KL = �1 − (ü−��3( − 1)(1 − 2)�44�2��3 + 3(ν − 1)(1 − 2)�44��3"2 � :− ν�8 + 2 "22� + 2ν"2 p1 − "q 2+ ν2�3( − 1)(1 − 2)�4"4�2(1 + )��3 − 3(1 − 2)�44��3" �2 :2+ p1 − "q �8 + 2 "22�" û
(5.20)
The maximum stress which happens at the center of the plate <33 Ò|3²¬ is presented in
equation (5.21).
<33 Ò|3²¬ = <��� = �1 − ( ö−� ��(Õ(( − 1) − 2�(( + 1)Ö16B�( � : + (1 + ) (8)û (5.21)
The additional variables /, 01, 0(, :, 2 and 8 appeared in equations (5.14) – (5.21) above
are given as follows.

80
/ = 27��( − 1) − 36#��(( + 1)+ ((19289340( − 7)( − 1)�((¬− 12859560(1 + )(13 − 85)( − 1)��(�(1+ 34992(1 + )(17327 ( − 88500 − 106070)( − 1)��(�#1�− 43740(26921 ( − 126732 − 154613)(1 + )(( − 1)��(��1#− 81( − 1)#(−9�(�(1771167 ( − 7683330 − 9561185)(1 + )* + 250880�(�( − 1)()1(+ 9720( − 1)*(−�(�(77947 ( − 311674 − 396213)(1 + )*+ 12544�(�( − 1)()(1 + )�(1¬− 1296�#( − 1)((−��((143359 ( − 528770 − 687425)(1 + )# + 15680�(�(15 + 17)( − 1)()(1 + )+ 81285120�(���(5 + 7)(1 + )(( − 1)*�− 6773760��(�(3 + 5)(15 + 17)( ( − 1)(#+ 13547520�(��1¬( − 1)(3 + 5)((1 + )*(− 752640�(��1((3 + 5)*(1 + )*)/( − 1)(01)1(
01 = 26460( − 7)( − 1)# − 52920(1 + )(3 − 19)( − 1)*�(�+ 144(1 + )(2509 ( − 11860 − 14450)( − 1)(�##− 12( − 1)(30797 ( − 128700 − 161705)(1 + )(��(+ (143359 ( − 528770 − 687425)(1 + )*�
0( = 8�14701*� ( − 1)(�(�#Õ3( − 1)(# − 6�(( ( − 1)(+ �#(3 + 5)(1 + )Ö(01)
: = 8(1470)1*�(�( �0( + (�(�(( − 1)#01(/)(*�3#�( − 1)(01(�(�(( − 1)#01(/)1*
2 = − 3:(�(3584�#�(�� ( − 1)(�(−78( *�( + 23 *�# + 42# * − 210# (+ 54(�( ( + 197�# ( + 294# + 78( �( + 325 �# − 126#− 54(�( + 151�#) 8 = − :(�(3584�#�(�� ( − 1)(�(−474( *�( + 437 *�# + 126# * − 630# (+ 1362(�( ( − 289�# ( + 882# + 474( �( − 1889 �#− 378# − 1362(�( − 1163�#)
(5.22)

81
Figure 5.13 shows how a non-dimensional displacement AÞßàT versus loads
á�Ti varies
with Poisson’s ratio for Case 3. In the figure, the exact solutions from the linear theory are
plotted with the solutions from the current study. The results show that Poisson’s ratio does not
have much effect on the maximum displacement for given load for both linear and nonlinear
solutions. However, it is clearly shown that the prediction based on the linear theory is only
accurate when AÞßàT is less than 0.5, which is expected.
Figure 5.13: Case 3: Dimensionless Displacement versus Dimensionless Load varying Poisson’s
Ratio, (�/ = 1.5)
Current Study
Linear Theory
� ���/�
�#/(�#�)

displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
Areduced for a g
Figure
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
AÞßàTreduced for a g
Figure
� ���/�
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
Þßà decreases. Additionally, the differences between the solutions of linear and nonlinear are
reduced for a g
Figure 5
� ���/�
Figure
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
reduced for a g
5.14
� ���/�
Figure
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
reduced for a g
14: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Figure 5.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
reduced for a given load.
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
iven load.
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
iven load.
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
iven load.
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio,
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio,
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio,
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio,
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio,
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
Thickness Ratio, �
.14 presents a parametric study
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying �/
�
82
.14 presents a parametric study of
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
( �/�
82
f how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying = 0
Current Study
Linear Theory
� (10E
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
displacement at the center. The plot indicates that as T� increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying 0.3
Current Study
Linear Theory
(10E
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
and
Current Study
Linear Theory
(10E-6)
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
and �/
Current Study
Linear Theory
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying / =
Current Study
Linear Theory
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a lar
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying = 1
how the geometry properties of the plate affect
displacement for Case 3. Notice that the thickness of the plate has a large effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying 1.5)
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are
: Case 3: Dimensionless Transverse Displacement versus Dimensionless Load varying
how the geometry properties of the plate affect
ge effect on the maximum
increases, the dimensionless displacement,
decreases. Additionally, the differences between the solutions of linear and nonlinear are

3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the
solution. Again, the stress from when displacement is small
increasing
F
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the
solution. Again, the stress from when displacement is small
increasing
Figure
< 33(/(��(
)3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the
solution. Again, the stress from when displacement is small
increasing
igure 5
< 33(/(��(
)Figure
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the
solution. Again, the stress from when displacement is small
increasingly
5.15
displacement varying radial distance
Figure
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the
solution. Again, the stress from when displacement is small
y inaccurate the larger the deflection becomes
15: Case 3: Non
displacement varying radial distance
Figure 5.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
load to take the current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
Case 3: Non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
Case 3: Non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
Case 3: Non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
Case 3: Non-dimensional radial stress versus non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
Current Study
Linear Theory
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
Current Study
Linear Theory
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
Current Study
Linear Theory
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance
Current Study
Linear Theory
83
.15 shows how the stress is affecte
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non
displacement varying radial distance "/
Current Study
Linear Theory
�
83
.15 shows how the stress is affected when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non/ (
����
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes
dimensional radial stress versus non =���/�
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small
inaccurate the larger the deflection becomes.
dimensional radial stress versus non= 0.3�
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
solution. Again, the stress from when displacement is small 0.
dimensional radial stress versus non-3, �
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
.5 >
-dimensional maximum transverse �/
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
> AÞßà
dimensional maximum transverse =
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
AÞßàT
dimensional maximum transverse 1.5
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
Þßà is accurate and become
dimensional maximum transverse 5, and
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse
, and �
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse � =
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse �/2
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse 2)
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and become
dimensional maximum transverse
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear
is accurate and becomes
dimensional maximum transverse
d when the displacement is increased for Case
3. To determine the difference in the stress result, the stress from the linear assumption is
determined at the same load level deflection for the geometrically nonlinear deflection, i.e. the
current study solution is also the load used to determine the stress in the linear

the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
become
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
become
Figure
F 33( /(��
# )the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
becomes
Figure
F 33( /(��
# )Figure
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
s increasing
Figure 5.
Figure
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
ncreasing
.16: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
Figure 5.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
ncreasing
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
ncreasingly
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
y inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
(
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
( =
.16 presents a parametric stud
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement = 0.
.16 presents a parametric study of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement .3 and
Current Study
Linear Theory
84
.16 presents a parametric study of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
and
Current Study
Linear Theory
84
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
and �/"/
Current Study
Linear Theory
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement =/
Current Study
Linear Theory
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement = 1.5
Current Study
Linear Theory
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement 5)
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small
inaccurate the larger the deflection becomes.
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
moment. Again, the moment from when displacement is small 0.
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
0.5
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
> A
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
AÞßàT
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
Þßà is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and
: Case 3: Dimensionless Moment versus Dimensionless Transverse Displacement
y of the effect that displacement has on moment at
the center and at the support for Case 3. This figure shows that displacement has a large effect on
is accurate and

moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
5.17 and
Figure
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and
Figure
F/F ���
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and
Figure 5
F/F ���
Since the results for the stre
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and 5.18. The given load is indicated in the caption of Figure
5.17
Since the results for the stre
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
17: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
moments in the radial
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
moments in the radial "middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
" and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
and 5middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stre
5 direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
Since the results for the stress and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
and
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
and
85
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
and =
85
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying = 0.
"
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying .3)
"/
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18. The given load is indicated in the caption of Figure 5.17 and
: Case 3: Moment Profile versus Radial Distance varying
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and
: Case 3: Moment Profile versus Radial Distance varying �/
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and
(�
F33F44
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.17 and 5.18.
�#/
33/F44/
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
.18.
/(�
F33/F44
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
��#)
33_���44_���
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in
) =
��� ���
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
middle plane along the radius of the plate can be easily plotted for a given load shown in Figur
500
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
Figur
500/29
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
Figure
29
ss and moments are expressed symbolically, the profile of the
direction and the profile of the stresses at the top, bottom, and
e

86
Figure 5.18 is a stress profile that shows the top, bottom and middle plane stress along the
plate for a certain load case. <��� is determined from equation (5.20).
Figure 5.18: Case 3: Stress Profile through the Thickness (�#/(��#) = 500/29, �/ = 1.5, and = 0.3)
� = − �2 � = + �2 � = 0
"/
< 33/<���

87
CHAPTER 6
CONCULSION
Groebner basis is utilized in this thesis to demonstrate the usefulness in solving nonlinear
systems of equations to develop more analytical solutions. Analytical solutions are preferred
because the parametric study is much easier to perform over a numerical solution. We would like
the engineering community to become more familiar with this method and therefore, a
background of Groebner basis is provided in Chapter 3. The current study solves geometrically
nonlinear circular isotropic plates subject to uniform distributed load. The current study uses the
total potential energy of the plate in polar coordinates with the Ritz method to develop system of
algebraic equations. The resulting system of equations is coupled and nonlinear. Therefore,
Groebner basis is used to decouple the nonlinear algebraic equations and make it possible to solve
analytically. Purely symbolic solutions for displacement, stress and moments for three cases
defined in Chapter 4 were able to be found and are shown in Chapter 5.
The solutions of the current study were verified through the use of a finite element
simulation. The comparison between ANSYS and the current study showed that the two
solutions had good agreement with an error less than 4%. The results of the validation are
presented in Chapter 4. Included in the validation the exact solution from the linear theory was
compared to the ANSYS solution and the current study solution. The linear theory solution
demonstrated to be not accurate for displacements greater than half of the thickness which was
expected. The percent error between the linear theory solution and the current study is over 80%.
Therefore, it is shown the current study provided significant accuracy in the nonlinear range.

88
To provide accuracy using the Ritz method, typically additional unknown coefficients
can be added to the trial functions. The addition of a coefficient to the transverse displacement
did demonstrate a limitation of using Groebner basis to help solve system of equations, because
the resulting Groebner basis had a polynomial of degree order 9. Therefore, the system could not
be solved analytically because there is no closed form solution for a polynomial of degree order
five or more. However, the two coefficient solutions were solved numerically and shown to only
to provide 2% of accuracy increase over the one coefficient solution. When compared to
providing 80% accuracy increase provided by the one coefficient solution to the linear solution,
the one coefficient solution is acceptable.
There are many nonlinear problems especially in computational mechanics that can be
helped by Groebner basis to be solved analytically. In future studies, this thesis work can be
extended to problems with different boundary conditions, varied thickness, or thermal and
dynamic loading. In conclusion, the Groebner basis methodology is of great value in generating
analytical solutions combined with the methods of Ritz, Galerkin, and similar approximation
methods of weighted residuals which can produce correspondingly low order systems of
polynomial algebraic equations.

89
REFERENCES

90
[1] S. Qaqish, "Comparison between linear and nonlinear structural analysis and the use of very
small increments in solving nonlinear structural analysis," Computers & Structures, vol. 33,
no. 4, pp. 923-928, 1989.
[2] R. Szilard, Theories and Applications of Plate Analysis. United States: John Wiley & Sons,
Inc., 2004.
[3] R. Dugas, History of Mechanics. New York, NY, United States: Dover Publications, 1988.
[4] S. Timoshenko and S. Woinowsky-Krieger, Theory of Plates and Shells. New York:
McGraw-Hill, 1959.
[5] L. Duarte Filho and A. Awruch, "Geometricall nonlinear static and dynamic analysis of
shells and plates using eight-node hexahedral element with one-point quadrature," Finite
Elements in Analysis and Design, vol. 40, pp. 1297-1315, 2004.
[6] X. Cui, et al., "A Smoothed Finite Element Method (SFEM) for Linear and Geometrically
Nonlinear Analysis of Plates and Shells," Computer Modeling in Engineering and Science,
vol. 28, no. 2, pp. 109-125, 2008.
[7] C. Tiago and P. Pimenta, "An EFG method for the nonlinear analysis of plates undergoing
arbitraily large deformations," Engineering Analysis with Boundary Elements, vol. 32, pp.
494-511, 2008.
[8] A. Shahidi, M. Mahzoon, M. Saadatpour, and M. Azhari, "Very Large Deformation but Smal
Strain Analysis of Plates and Folded Plates by Finite Strip Method," Advances in Structural
Engineering, vol. 8, no. 6, pp. 547-560, 2005.

91
[9] G. Narayana and C. S. Krishnamoorthy, "A Simplified formulation of a plate/shell element
for geometrically nonlinear analysis of moderately large deflections with small rotations,"
Finite Elemnts in Analysis and Design, vol. 4, pp. 333-350, 1989.
[10] K. Bathe and Bolourchi, "A Geometric and Material Nonlinear Plate and Shell Element,"
Computers & Structures, vol. 11, pp. 23-48, 1980.
[11] I. Babuska and L. Li, "The Problem of Plate Modeling: Theoretical and Computational
Results," Computer Methods in Applied Mecahnics and Engineering, vol. 100, pp. 249-273,
1992.
[12] F. Wan, "Stress Boundary Conditions for Plate Bending," International Journal of Solids
and Structures, vol. 40, pp. 4107-4123, 2003.
[13] J. Reddy and R. Averill, "Advances in the Modeling of Laminated Plates," Computing
Systems in Engineering, vol. 2, no. 5/6, pp. 541-555, 1991.
[14] X. Zheng and Y. Zhou, "Exact solution of Nonlinear Circular Plate on Elastic Foundation,"
Journal of engineering mechanics, vol. 114, pp. 1303-1316, 1988.
[15] K. Yeh and X. Zheng, "An analytical formula of the exact solution to Von Kármán's
equations of a circular plate under a concentrated load ," International Journal of Non-
Linear Mechanics, vol. 24, no. 6, pp. 551-560, 1989.
[16] C. Chia, Nonlinear Analysis of Plates. New York, United States: McGraw-Hill International
Book Co, 1980.
[17] O. Thomas and S. Bilbao, "Geometrically nonlinear flexural vibrations of plates: In-plane
boundary conditions and some symmetry properties," Journal of Sound and Vibration, vol.

92
315, pp. 569-590, 2008.
[18] M. Haterbouch and R. Benamar, "Geometrically Nonlinear Free Vibrations of Simply
Supported Isotropic Thin Circular Plates," Journal of Sound and Vibration, vol. 280, pp.
903-924, 2005.
[19] M. Amabili and S. Carra, "Thermal Effects on Geometrically Nonlinear Vibrations of
Rectangular Plates with Fixed Edges," Journal of Sound and Vibration, vol. 321, pp. 936-
954, 321.
[20] Y. Yeh, M. Jang, and C. Wang, "Nonlinear Analysis of Large Deflections of Clamped
Orthotropic Rectangular Plate Using Hybrid Method," in Applied Simulation and Modelling,
Rhodes, Greece, 2006, pp. 15-20.
[21] J. Yang, L. Sun, and C. Lei, "Geometrically nonlinear analysis of Orthotropic Rectangular
Thin Plates with Three Edges Clamped and One Edge Simple Supported," China Acedemic
Journal of Engineering Mechanics, vol. 19, pp. 39-43, Jun. 2002.
[22] J. Reddy, Theory and Analysis of Elastic Plates and Shells. Boca Raton, FL, United States:
CRC Press, 2008.
[23] S. Dickinson and A. Blasio, "On the Use of Orthogonal Polynomials in the Rayleigh-Ritz
Method for the Study of the Flexural Vibration and Buckling of Isotropic and Orthotropic
Rectangular Plates," Journal of Sound and Vibration, vol. 108, no. 1, pp. 51-62, 1986.
[24] B. Singh and S. Chakraverty, "Transverse Vibrations of Completely-free Ellipitc and
Circular Plates Using Orthogonal Polynomials in the Rayleigh-Ritz Method," International
journal of mechanical sciences, vol. 33, no. 9, pp. 741-751, 1991.

93
[25] K. Liew, Vibration of Mindlin plates: programming the p-version Ritz Method. Oxford,
United Kingdom: El Sevier Science Inc, 1998.
[26] B. Buchberger, "Bruno Buchberger's PhD thesis 1965: An algorithm for finding the bsis
element of the residue class ring of a zero dimensional polynomial idel," Journal of Symbolic
Computation , vol. 41, pp. 475-511, 2006.
[27] B. Buchberger and F. Winkler, "Groebner Bases and Applications," Cambridge University
Press London Mathmatical Society Lecture Note Series, 251, 1998.
[28] B. Buchberger, "Applications of Groebner Bases in Non-Linear Computational Geometry,"
in Proceedings of the International Symposium on Trends in Computer Algebra, London,
UK, 1987, pp. 1-29.
[29] E. Roanes-Lozano and E. Roanes-Macias, "Some Applications of Groebner Bases,"
Computing in Science and Engineering, vol. 6, pp. 56-60, 2004.
[30] V. Borisevich, V. Potemkin, S. Strunkov, and H. Wood, "Global Methods for Solving
Systems of Nonlinear Algebraic Equations," Computers and Mathematics with Applications,
vol. 40, pp. 1015-1025, 2000.
[31] W. Boege, R. Gebauer, and H. Kredel, "Some examples for solving systems of algebraic
equations by calculatin Groebner bases," Journal of Symbolic Computation, vol. 2, no. 1, pp.
83-98, 1986.
[32] N. Ioakimidis, "Mathematica-based formula verification in applied mechanics," in First
National Conference on Recent Adcances in Mechanical Engineering, Patras, Greece, 2001,
pp. 1-6.

94
[33] N. Ioakimidis and E. Anastasselou, "Application of Groebner Bases to Problems of
Movement of a Particle," Computers & Mathematics with Applications, vol. 27, no. 3, pp.
51-57, 1994.
[34] N. Ioakimidis and E. Anastasselou, "Computer-based manipulation of systems of equations
in elasticity problems with Groebner bases," Computer Methods in Applied Mechanics and
Engineering, vol. 110, pp. 103-111, 1993.
[35] N. Ioakimidis and E. Anastasselou, "Groebner Bases in truss problems with Maple,"
Computer & Structures, vol. 52, pp. 1093-1096, 1994.
[36] N. Ioakimidis, "Determination of Critical Buckling Loads with Groebner Bases," Computers
& Structures, vol. 55, no. 3, pp. 433-440, 1995.
[37] Y. Liu, G. Buchanan, and J. Peddieson, "Application of Groebner Basis Methodology to
Nonlinear Static Cable Analysis," Journal of Offshore Mechanics and Arctic Engineering,
vol. 135, no. 4, Jul. 2013.
[38] R. Vandervort and Y. Liu, "Geometrically Nonlinear Analysis of Rectangular Plates with the
Groebner Bases," in Proc. 44 the Annual Technical Meeting Society of Engineering Science
2007, Texas A&M University, College Station, Texas, October 21-24, 2007.
[39] J. L. a. D. O. D Cox, Ideals, Varieties, and Algorithms: An Introduction to Computational
Algebraic Geometry and Commutative Algebra, 3rd ed. New York, NY, USA: Springer,
2007.
[40] ANSYS. ANSYS Mechanical APDL, Release 13.0.

95
[41] N. Bencharif and S. Ng, "Linear and Nonlinear Deflection Analysis of Thick Rectangular
Plates - I. Theoretical Derivation," Computers & Structures, vol. 50, no. 6, pp. 757-761,
1994.
[42] R. Liu, "Nonlinear Bending of Circular Snadwich Plates," Applied Mathematics and
Mechanics, vol. 2, no. 2, pp. 189-208, Aug. 1981.
[43] E. Efraim and M. Eisenberger, "Exact vibration analysis of variable thickness thick annular
isotropic and FGM plates," Journal of Sound and Vibration, vol. 299, pp. 720-738, 2007.

96
APPENDICES

97
APPENDIX A
DEFINITIONS OF SOME PRELIMINARY CONCEPTS

98
A-1. Field:
A field consists of a set ´ in which two operators are imposed ∙ and +. A list of the properties
is presented below:
(i) ∙ (� + o) = ∙ � + ∙ o∀, �, o ∈ ´ (distributive)
(ii) + � = � + �. ∙ � = � ∙ ∀, �, o ∈ ´ (commutative)
(iii) ( + �) + o = + (� + o)�. ∙ (� ∙ o) = ( ∙ �) ∙ o∀, �, o ∈ ´
(associative)
(iv) 0,1 ∈ ´�Joℎ�ℎ� + 0 = ∙ 1 = ∀ ∈ ´ (identities)
(v) C�!�� ∈ ´�ℎ�"���� ∈ ´�Joℎ�ℎ� + � = 0 (additive inverse)
(vi) C�!�� ∈ ´, ≠ 0, �ℎ�"���o ∈ ´�Joℎ�ℎ� ∙ o = 1 (multiplicative inverse)
A-2. Commutative Ring:
A commutative ring consists of a set � in which two operators are imposed ∙ and +. A list of
the properties is presented below:
(i) ∙ (� + o) = ∙ � + ∙ o∀, �, o ∈ � (distributive)
(ii) + � = � + �. ∙ � = � ∙ ∀, �, o ∈ � (commutative)
(iii) ( + �) + o = + (� + o)�. ∙ (� ∙ o) = ( ∙ �) ∙ o∀, �, o ∈ �
(associative)
(iv) 0,1 ∈ ��Joℎ�ℎ� + 0 = ∙ 1 = ∀ ∈ � (identities)
(v) C�!�� ∈ ��ℎ�"���� ∈ ��Joℎ�ℎ� + � = 0 (additive inverse)

99
A-3. Ideal:
An ideal, ¾ is a subset of a commutative ring � that satisfies the following properties:
(i) 0 ∈ ¾ (ii) ¾¦¦, Ç ∈ ¾�ℎ��¦ ∙ Ç ∈ ¾ (iii) ¾¦¦ ∈ ¾�.ℎ ∈ ��ℎ��ℎ¦ ∈ ¾
A-4. Monomial Ordering:
A monomial ordering on ´»�1, … , �u¼ is any relation, >, on ℤR, or any relation on the set of
monomials �¶, where / ∈ ℤR, satisfying the following:
(i) > is a total ordering on ℤR
(ii) ¾¦/ > 0 and 2 ∈ ℤR, then / + 2 > 0 + 2
(iii) Every non-empty subset of ℤRhas a smallest element under >
Using a function ¦ = �#&(�� + ��&*�� as an example with the ordering � > & > �, then
the following orders can be determined:
Lexicographic Order:
If / and 0 are n-tuples consisting of the powers of a monomial then / >��� 0 if when / − 0 the
left most nonzero entry of the vector difference is positive.
�#&(�� → / = (4,2,7) ��&*�� → 0 = (5,3,5) / − 0 = (−1,−1,2) 0 >��� / therefore ¦ = ��&*�� + �#&(��
(A.1)

100
Graded Lexicographic Order:
If / and 0 are n-tuples consisting of the powers of a monomial, then / >�3��� 0 if the sum of the
n-tuples for / is greater than the sum of the n-tuples for 0, |/| = ∑ /tut²1 > |0| = ∑ 0tut²1 . In
cases where |/| = |0|, lexicographic order is used to determine the order; / >��� 0.
�#&(�� → / = |(4,2,7)| = 13 ��&*�� → 0 = |(5,3,5)| = 13 0 >�3��� /, because |/| = |0| and / − 0 = (−1,−1,2) therefore ¦ = ��&*�� + �#&(��
(A.2)
Graded Reverse Lexicographic Order:
If / and 0 are n-tuples consisting of the powers of a monomial, then / >�3����� 0 if the sum of
the n-tuples for / is greater than the sum of the n-tuples for 0, |/| = ∑ /tut²1 > |0| = ∑ 0tut²1 .
In cases where |/| = |0|, if when / − 0 the right most nonzero entry of the vector difference is
negative.
�#&(�� → / = |(4,2,7)| = 13 ��&*z� → 0 = |(5,3,5)| = 13 / >�3����� 0, because |/| = |0| and / − 0 = (−1,−1,2) therefore ¦ = �#&(�� + �&*��
(A.3)

101
A-5. Buchberger’s Algorithm:
Let I =< f1, … , f� >≠ 0 be a polynomial ideal. The Groebner basis G for I cab be constructed in
a finite number of steps using the following algorithm:
INPUT: F = (f1, … , f�) OUTPUT: A Groebner basis G = (g1, … , g�) for I, with F ⊂ G
G ≔ F
REPEAT
G� ≔ G
FOR each pair {p, q}, p ≠ q in G′ DO
S ≔ S(p, q) !""
IF S ≠ 0 THEN G ≔ G ∪ {S} UNTIL C = C′
where S(p, q) !"" is notation for the remainder on the division of S(p, q) by the ordered t-tuple G��.

102
APPENDIX B
EXAMPLES OF AFFINE VARIETIES

103
Example 1:
The affine variety, %(¦) defined by ¦ = & − �( is shown in Figure B.1, which is a collection of
all the points that satisfy ¦ = 0 in ℝ(. For this example, the solution is a parabolic line.
Figure B.1: The Affine Variety, %(& − �(), in ℝ(
%(& − �()
& − �( = 0
�
&

104
Example 2:
The affine variety, %(¦) defined by ¦ = �( + &( + �( − 25 is shown in Figure B.2, which is a
collection of all the points that satisfys ¦ = 0 in ℝ*. And for this example, the affine variety is
the surface of a sphere with the radius of 5.
Figure B.2: The Affine Variety, %(�( + &( + �( − 25), in ℝ*
%(�( + &( + �( − 25)
�( + &( + �( − 25 = 0
�&
�

105
Example 3:
Figure B.3 shows the affine variety the affine variety, %(¦) defined by ¦ = �* − &* − �*, which
is a collection of all the points that satisfy ¦ = 0 in ℝ*.
Figure B.3: The Affine Variety, %(�* − &* − �*), in ℝ*
%(�* − &* − �*)
�* − &* − �* = 0
�&
�

106
Example 4:
Figure B.4 illustrates the affine variety, %(¦1, ¦() defined by ¦1 = & − �* and ¦( = & − �, which
is a collection of all the points that satisfy ¦1 = 0 and ¦( = 0 in ℝ(. The affine variety, %(& −�*, & − �), equals {(0,0), (−1,−1), (1,1)} which corresponds to the three intersection points of
the polynomials ¦1 and ¦(.
Figure B.4: The Affine Variety, %(& − �*, & − �) = {(0,0), (−1,−1), (1,1)}, in ℝ(
%(& − �*, & − �)
& − � = 0
& − �* = 0
�
&

107
Example 5:
In Figure B.5, the affine variety, %(¦1, ¦() defined by ¦1 = x( + y( + z( − 25 and ¦( = �, which
is a collection of all the points that sarisfy ¦1 = 0 and ¦( = 0. %(x( + y( + z( − 25, �) equals
�( + &( − 25 which is a circle in the � = 0 plane.
Figure B.5: The Affine Variety %(�( + &( + �( − 25, �) = �( + &( − 25 in the �& plane.
%(�( + &( + �( − 25, �)
x( + y( + z( − 25 = 0 � = 0
�&
�

108
APPENDIX C
COMPARISION OF EXACT LINEAR SOLUTION FROM THE LINEAR THEORY TO
THE SOLUTION FOUND FROM THE RITZ METHOD FOR THE CIRCULAR PLATE
WITH OVERHANG (CASE 3)

109
> restart:with(DETools):with(plots):with(linalg): #This command will restart the maple worksheet and start the
packages DETools, plots and linalg
Governing Equation of Linear Deflection for Axisymmetric
Bending of Circular Plate We are going to start out this Maple worksheet by solving the exact solution for Case 3
Immovable Simply Supported with Overhang
> #Showing the Governing equation symbolically D11/r*Diff(r*Diff(Diff(r*Diff(w(r),r),r)/r,r),r)=q;
The governing equation is split into two differential equations. The first with a uniform
distributed load, q and the second with no load.
> #Computing the differentials GE0:=D11/r*diff(r*diff(diff(r*diff(w(r),r),r)/r,r),r)=q:
GE1:=D11/r*diff(r*diff(diff(r*diff(w(r),r),r)/r,r),r)=0:
> def:=w(r);
Solving both differential equation
The first governing equation is solve GE0.
> #Solving the first differential. def2:=subs(dsolve(GE0),def):
w0:=def2;
Finding constants based on boundary conditions, since there are 4 unknown constants there are
four boundary conditions we can apply to figure out those constants.
> ##Boundary Condition Equation 1 subs(r=0,w0);
=
D11
d
d
r
r
d
d
r
d
d
r
r
d
d
r( )w r
r
rq
:= def ( )w r
:= w0 + + + − + q r4
64 D11
_C1 r2
2_C2 ( )ln r
1
2_C3 r2 ( )ln r
_C3 r2
4_C4
+ _C2 ( )ln 0 _C4

110
> #w(0) cannot be infinite, so C2 cannot exists due to ln(r) w0:=subs(_C2=0,w0);
> #Computing the transverse shearing force Q0[rr]:=simplify(-D11*diff((diff(w0,r,r)+(1/r)*diff(w0,r)),r)):
expand(Q0[rr]);
> #Because Q0[rr] cannot be infinite at r=0, C3 must equal zero w0:=subs(_C3=0,w0);
We have determined two constants to be zero C2 and C3.
> ##Boundary Condition Equation 2 eq1:=subs(r=a,w0)=0;
> diff(w0,r); subs(r=0,diff(w0,r))=0;
> #Last equation did not any value, so now compute the moment M0[rr]:=-D11*(diff(w0,r$2)+nu/r*diff(w0,r));
Since displacements are based on each other the second differential equation is solved to be able
to apply the boundary conditions at r=a
> #Solving second governing equation defo:=w(r):
defo2:=subs(dsolve(GE1),defo):
:= w0 + + − + q r4
64 D11
_C1 r2
2
1
2_C3 r2 ( )ln r
_C3 r2
4_C4
− − r q
2
2 _C3 D11
r
:= w0 + + q r4
64 D11
_C1 r2
2_C4
:= eq1 = + + q a4
64 D11
_C1 a2
2_C4 0
+ r3 q
16 D11_C1 r
= 0 0
:= M0rr
−D11
+ + 3 r2 q
16 D11_C1
ν
+
r3 q
16 D11_C1 r
r

111
w1:=_C5*r^2+_C6*r^2*ln(r)+_C7+_C8*ln(r);
> #Computing the transverse shearing force Q0[rr]:=simplify(-D11*diff((diff(w0,r,r)+(1/r)*diff(w0,r)),r));
Q1[rr]:=simplify(-D11*diff((diff(w1,r,r)+(1/r)*diff(w1,r)),r));
Knowing that the transverse shearing force at the free edge must be equal to zero the next
boundary condition can be applied.
> ##Boundary Condition Equation 3 simplify(subs(r=b,Q1[rr])=0);
> #Therefore _C6 must be zero w1:=subs(_C6=0, w1);
The transverse displacement at r=a must be zero, because of the support at that location
> ##Boundary Condition Equation 4 eq2:=subs(r=a,w1)=0;
The moment at r=a must equal for both moment functions
The moment at r=b must equal zero
And the slopes at r=a must be equal for both transverse displacement functions
> ##Boundary Condition Equation 5,6,7 M1[rr]:=-D11*(diff(w1,r$2)+nu/r*diff(w1,r));
eq3:=simplify(subs(r=a,M0[rr])=subs(r=a,M1[rr]));
eq4:=simplify(subs(r=b,M1[rr])=0);
eq5:=subs(r=a,diff(w0,r))=subs(r=a,diff(w1,r));
:= w1 + + + _C5 r2 _C6 r2 ( )ln r _C7 _C8 ( )ln r
:= Q0rr
−r q
2
:= Q1rr
−4 D11 _C6
r
= −4 D11 _C6
b0
:= w1 + + _C5 r2 _C7 _C8 ( )ln r
:= eq2 = + + _C5 a2 _C7 _C8 ( )ln a 0

112
We have now found all but 5 non zero constants.
> w0;w1;
Fortunately, we have 5 equations and therefore can determine those last 5 constants.
> ##Solving the constants and substituting them back into the ##transverse displacement function
w0:=subs(solve({eq1,eq2,eq3,eq4,eq5},[_C1,_C4,_C5,_C7,_C8])[1],w
0);
w1:=subs(solve({eq1,eq2,eq3,eq4,eq5},[_C1,_C4,_C5,_C7,_C8])[1],w
1);
Now we have solved the exact solution for the simply supported circular plate with an overhang
:= M1rr
−D11
− + 2 _C5_C8
r2
ν
+ 2 _C5 r
_C8
r
r
eq3 − − − − 3 a2 q
16_C1 D11
ν a2 q
16ν _C1 D11 = :=
−D11 ( ) − + + 2 _C5 a2 _C8 2 ν _C5 a2
ν _C8
a2
:= eq4 = −D11 ( ) − + + 2 _C5 b2 _C8 2 ν _C5 b2
ν _C8
b20
:= eq5 = + a3 q
16 D11_C1 a + 2 _C5 a
_C8
a
+ + q r4
64 D11
_C1 r2
2_C4
+ + _C5 r2 _C7 _C8 ( )ln r
w0q r4
64 D11
a2 q ( )− + − − a2 a2ν 2 b2 2 ν b2 r2
32 b2 ( ) + 1 ν D11 + :=
q a4 ( )− + − − 2 a2 2 a2ν 3 b2 3 ν b2
64 b2 ( ) + 1 ν D11 −
w1 :=
+ − ( )− + 1 ν q a4 r2
32 b2 ( ) + 1 ν D11
1
32
q a4 ( ) − + + a2 a2ν 2 ( )ln a b2 2 ( )ln a b2
ν
b2 ( ) + 1 ν D11
1
16
q a4 ( )ln r
D11

113
> #Plotting the results from the solution plot1:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,w0),r=0..10,lab
els=[`r`,`w`],legend=`Linear Theory w`):
plot2:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,w1),r=10..15,la
bels=[`r`,`w`],legend=`Linear Theory woh`):
display(plot1,plot2,implicitplot(y=0,x=0..15,y=-0.05..0.05,
color=black,legend=`Axis Line`),axes=boxed,title=`Transverse
Displacement for Linear Solution (Case
3)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting the moment M0[rr]:=simplify(-D11*(diff(w0,r$2)+nu/r*diff(w0,r)));
M1[rr]:=simplify(-D11*(diff(w1,r$2)+nu/r*diff(w1,r)));
plot4:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,M0[rr]),r=0..10
):
plot6:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,M1[rr]),r=10..1
5):

114
display(plot4,plot6,implicitplot(y=0,x=0..15,y=-0.05..0.05,
color=black),axes=boxed,title=`Radial Moment for Linear Solution
(Case 3)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
>
Ritz Method Analysis To insure our results will give us the correct assumption in the Ritz solution it is computed using
the exact solution.
> #Symbolically showing the Total Potential Energy TPE:=Int(Pi*D11*(r*Diff(wr0(r),r,r)^2+1/r*Diff(wr0(r),r)^2+2*nu*
Diff(wr0(r),r)*Diff(wr0(r),r,r))-
:= M0rr
−( ) + − + − − r2 b2
ν a4ν 2 a2
ν b2 3 r2 b2 a4 2 a2 b2 q
16 b2
:= M1rr
( )− + + − r2ν ν b2 r2 b2 a4 q
16 r2 b2

115
2*Pi*q*wr0(r)*r,r=0..a)+Int(Pi*D11*(r*Diff(wr1(r),r,r)^2+1/r*Dif
f(wr1(r),r)^2+2*nu*Diff(wr1(r),r)*Diff(wr1(r),r,r)),r=a..b);
> ##Inputting the assumed displacement functions wr0:=r->(1/64/D11*q*r^4+1/32*a^2*q*(-a^2+a^2*nu-2*b^2-
2*nu*b^2)/b^2/(1+nu)/D11*r^2-1/64*q*a^4*(-2*a^2+2*a^2*nu-3*b^2-
3*nu*b^2)/b^2/(1+nu)/D11)*a11;
wr1:=r->(1/32/b^2/(1+nu)*(-1+nu)/D11*q*a^4*r^2+1/32*q*a^4*(a^2-
a^2*nu+2*ln(a)*b^2+2*ln(a)*b^2*nu)/b^2/(1+nu)/D11-
1/16*1/D11*q*a^4*ln(r))*a11;
> ##Computing the Total Potential Energy TPE:=int(Pi*D11*(r*diff(wr0(r),r,r)^2+1/r*diff(wr0(r),r)^2+2*nu*
diff(wr0(r),r)*diff(wr0(r),r,r))-
2*Pi*q*wr0(r)*r,r=0..a)+int(Pi*D11*(r*diff(wr1(r),r,r)^2+1/r*dif
f(wr1(r),r)^2+2*nu*diff(wr1(r),r)*diff(wr1(r),r,r)),r=a..b)
assuming a>0,b>a;
TPE
⌠
⌡
0
a
π D11
+ + r
d
d2
r2( )wr0 r
2
d
d
r( )wr0 r
2
r2 ν
d
d
r( )wr0 r
d
d2
r2( )wr0 r :=
2 π q ( )wr0 r r − rd
d
⌠
⌡
a
b
π D11
+ + r
d
d2
r2( )wr1 r
2
d
d
r( )wr1 r
2
r2 ν
d
d
r( )wr1 r
d
d2
r2( )wr1 r r +
wr0 r1
64
q r4
D11
1
32
a2 q ( )− + − − a2 a2ν 2 b2 2 ν b2 r2
b2 ( ) + 1 ν D11 +
→ :=
q a4 ( )− + − − 2 a2 2 a2ν 3 b2 3 ν b2
64 b2 ( ) + 1 ν D11 −
a11
wr1 r
→ :=
+ − 1
32
( )− + 1 ν q a4 r2
b2 ( ) + 1 ν D11
1
32
q a4 ( ) − + + a2 a2ν 2 ( )ln a b2 2 ( )ln a b2
ν
b2 ( ) + 1 ν D11
1
16
q a4 ( )ln r
D11
a11

116
> ##Setting the equation for the unknow coefficient eq1:=diff(TPE,a11)=0;
> #Solving the unknown coefficient a11:=solve(eq1,a11);
Since the unknown coefficient is 1. We know that the assumed shape function will yield
the same exact solution as is predicted from the linear theory.
> simplify(subs(r=0,w0)); simplify(wr0(0));
Showing the resulting functions from the Ritz solution and the exact solution from the
linear theory. Notice that they match exactly.
> plot7:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,wr0(r)), r=0..10,style=point,symbol=diamond,color=blue,numpoints=5,legend
=`Linear Ritz w`):
plot8:=plot(subs(a=10,b=15,D11=10000,q=10,nu=0.3,wr1(r)),r=10..1
5,style=point,symbol=diamond,color=blue,numpoints=5,
legend=`Linear Ritz woh`):
display(plot1,plot2,plot7,plot8,implicitplot(y=0,x=0..15,y=-
0.05..0.05, color=black,legend=`Axis
TPE π q2 a11 a2 12 a6ν b2 16 a4 b4
ν 6 a11 a8ν 6 a11 a6 b2 3 a11 a8
ν2
− − + + ( :=
5 a11 a4 b4 6 a11 a6ν
2 b2 8 a11 a4 b4ν 3 a11 a4
ν2 b4 12 a6 b2 16 a4 b4
+ − + + − −
3 a11 a8 + ) 768 D11 ( ) + 1 ν b4( )
a11 2 a6 q2π ( ) − + + − + − a4 b2 2 a4
ν b2 b2ν
2 a4 b6ν
2 b6 2 b4 a2ν 2 a2
ν2 b4
256 D11 ( ) + 1 ν b6 −
eq1 π q2 a2 12 a6ν b2 16 a4 b4
ν 6 a11 a8ν 6 a11 a6 b2 3 a11 a8
ν2
− − + + ( :=
5 a11 a4 b4 6 a11 a6ν
2 b2 8 a11 a4 b4ν 3 a11 a4
ν2 b4 12 a6 b2 16 a4 b4
+ − + + − −
3 a11 a8 + ) 768 D11 ( ) + 1 ν b4( ) π q2 a11 a2
+
( )− + + + − + + + 6 a8ν 6 a6 b2 3 a8
ν2 5 a4 b4 6 a6
ν2 b2 8 a4 b4
ν 3 a4ν
2 b4 3 a8 (
768 D11 ( ) + 1 ν b4 )
a11 a6 q2π ( ) − + + − + − a4 b2 2 a4
ν b2 b2ν
2 a4 b6ν
2 b6 2 b4 a2ν 2 a2
ν2 b4
128 D11 ( ) + 1 ν b6 − 0 =
:= a11 1
−q a4 ( )− + − − 2 a2 2 a2
ν 3 b2 3 ν b2
64 b2 ( ) + 1 ν D11
−q a4 ( )− + − − 2 a2 2 a2
ν 3 b2 3 ν b2
64 b2 ( ) + 1 ν D11

117
Line`),axes=boxed,title=`Transverse Displacement for Linear
Solution & One parameter Ritz Solution
(Case 3)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);

118
APPENDIX D
MAPLE FILE WITH CURRENT STUDY SOLUTION FOR GEOMETRICALLY
NONLINEAR CIRCULAR PLATE WITH FIXED EDGE (CASE 1)

119
> ##This restarts the Maple worksheet, plus it also opens the ##Groebner and plots packages so the associated commands can be
##used.
restart:with(Groebner):with(plots):
> ###Parameters for graphs#### param_q5:=[E=29000000,a=10,nu=0.3,q=5,t=0.1]:
param_q1:=[E=29000000,a=10,nu=0.3,q=0.25,t=0.1]:
param_q01:=[E=29000000,a=10,nu=0.3,q=0.1,t=0.1]:
FEA Solution Results
Several Solutions were run as a check and are inputted below as arrays.
These results were used for large displacement with the following parameters:
Ran Geometrically Nonlinear in ANSYS 13.0
Material Properties: E=29000000, nu=0.3
Geometry Properties: a=10,t=0.1
Loading: q=5
> ###In-plane displacement### u_r_ANSYS_q5:=[0.0,0.0],[0.1880,2.4235E-5],[0.3760,4.8342E-
5],[0.564,7.2194E-5],[0.752,9.5665E-5],[0.9441,1.1912E-
4],[1.1362,1.4192E-4],[1.3462,1.6592E-4],[1.5561,1.8879E-
4],[1.7484,2.0862E-4],[1.94070,2.2723E-4],[2.133,2.4452E-
4],[2.3253,2.6036E-4],[2.5176,2.7463E-4],[2.7099,2.8723E-
4],[2.9023,2.9806E-4],[3.0946,3.0701E-4],[3.2869,3.140E-
4],[3.4792,3.1895E-4],[3.6715,3.2179E-4],[3.8638,3.2248E-
4],[4.0561,3.2096E-4],[4.2484,3.1722E-4],[4.4407,3.1126E-
4],[4.633,3.0308E-4],[4.8253,2.9271E-4],[5.0176,2.8023E-
4],[5.2099,2.6571E-4],[5.4023,2.4925E-4],[5.5946,2.3101E-
4],[5.7869,2.1117E-4],[5.9792,1.8992E-4],[6.1715,1.6749E-
4],[6.3638,1.4417E-4],[6.5561,1.2026E-4],[6.7484,9.6085E-
5],[6.9407,7.2027E-5],[7.133,4.8477E-5],[7.3253,2.5858E-
5],[7.5176,4.6001E-6],[7.7099,-1.4843E-5],[7.90230,-3.2041E-
5],[8.09460,-4.653301E-5],[8.2869,-5.7935E-5],[8.47920,-6.5875E-
5],[8.6715,-7.0074E-5],[8.8638,-7.0316E-5],[9.0559,-6.6555E-
5],[9.248,-5.885401E-5],[9.436,-4.779400E-5],[9.624,-3.3721E-
5],[9.81200,-1.7439E-5],[10.0,0.0]:
###Out-of-plane displacement###
w_r_ANSYS_q5:=[0.0,0.13942],[0.188,0.13934],[0.376,0.13911],[0.5
64,0.13872],[0.752,0.13819],[0.9441,0.13748],[1.1362,0.13661],[1
.3462,0.13548],[1.5561,0.13416],[1.7484,0.13278],[1.9407,0.13125
],[2.133,0.12956],[2.3253,0.12772],[2.5176,0.12572],[2.7099,0.12
356],[2.9023,0.12126],[3.0946,0.11881],[3.2869,0.11621],[3.4792,
0.11346],[3.6715,0.11058],[3.8638,0.10755],[4.0561,0.1044],[4.24
84,0.10111],[4.4407,9.7698E-2],[4.633,9.4167E-
2],[4.8253,9.0522E-2],[5.0176,8.6771E-2],[5.2099,8.292E-
2],[5.4023,7.8977E-2],[5.5946,7.495401E-2],[5.7869,7.0859E-

120
2],[5.9792,6.6704E-2],[6.1715,6.2501E-2],[6.3638,5.8263E-
2],[6.5561,5.4005E-2],[6.7484,4.9743E-2],[6.9407,4.5494E-
2],[7.133,4.1276E-2],[7.3253,3.7111E-2],[7.5176,3.3019E-
2],[7.7099,2.9025E-2],[7.9023,2.5152E-2],[8.0946,2.1431E-
2],[8.2869,1.7889E-2],[8.4792,1.4558E-2],[8.6715,1.1471E-
2],[8.8638,8.6644E-3],[9.0559,6.1774E-3],[9.248,4.0479E-
3],[9.436,2.3516E-3],[9.624,1.0814E-3],[9.812,2.7993E-
4],[10.0,0.0]:
> ###Stress at the bottom of the plate### FEA_sigma_bot_q5:=[0,-3669],[0.376,-3667.6],[0.752,-
3663.7],[1.1362,-3653.4],[1.5561,-3633.2],[1.9407,-
3599],[2.3253,-3544.9],[2.7099,-3461.4],[3.0946,-
3338.3],[3.4792,-3164.5],[3.8638,-2925.3],[4.2484,-
2604.6],[4.633,-2185.2],[5.0176,-1645.3],[5.4023,-
963.96],[5.7869,-
115.88],[6.1715,925.06],[6.5561,2186.9],[6.9407,3700.3],[7.3253,
5496.1],[7.7099,7606.8],[8.0946,10063],[8.4792,12901],[8.8638,16
152],[9.248,19863],[9.624,23953],[10,28580]:
###Stress at the top of the plate###
FEA_sigma_top_q5:=[0,14363],[0.376,14352],[0.752,14319],[1.1362,
14259],[1.5561,14162],[1.9407,14037],[2.3253,13872],[2.7099,1365
8],[3.0946,13387],[3.4792,13046],[3.8638,12623],[4.2484,12102],[
4.633,11466],[5.0176,10696],[5.4023,9772],[5.7869,8670.9],[6.171
5,7368.8],[6.5561,5840.4],[6.9407,4058.4],[7.3253,1994.9],[7.709
9,-379.03],[8.0946,-3090.7],[8.4792,-6171.8],[8.8638,-
9652],[9.248,-13575],[9.624,-17855],[10,-22656]:
These results were used for analyzing the limit of small displacement with the following
parameters:
Ran Geometrically Nonlinear in ANSYS 13.0
Material Properties: E=29000000, nu=0.3
Geometry Properties: a=10,t=0.1
Loading: q=0.25
> ###In-plane displacement###
u_r_ANSYS_q1:=[0,0],[0.188,2.7124E-07],[0.376,5.4023E-
07],[0.564,8.0472E-07],[0.752,1.0625E-06],[0.9441,1.3168E-
06],[1.1362,1.5596E-06],[1.3462,1.8095E-06],[1.5561,2.0405E-
06],[1.7484,2.2336E-06],[1.9407,2.4071E-06],[2.133,2.5598E-
06],[2.3253,2.6901E-06],[2.5176,2.7969E-06],[2.7099,2.8795E-
06],[2.9023,2.9370E-06],[3.0946,2.9691E-06],[3.2869,2.9755E-
06],[3.4792,2.9563E-06],[3.6715,2.9118E-06],[3.8638,2.8426E-
06],[4.0561,2.7496E-06],[4.2484,2.6338E-06],[4.4407,2.4967E-
06],[4.633,2.3397E-06],[4.8253,2.1649E-06],[5.0176,1.9743E-
06],[5.2099,1.7702E-06],[5.4023,1.5550E-06],[5.5946,1.3317E-
06],[5.7869,1.1031E-06],[5.9792,8.7213E-07],[6.1715,6.4193E-
07],[6.3638,4.1571E-07],[6.5561,1.9669E-07],[6.7484,-1.1885E-
08],[6.9407,-2.0683E-07],[7.133,-3.8507E-07],[7.3253,-5.4364E-

121
07],[7.5176,-6.7985E-07],[7.7099,-7.9117E-07],[7.9023,-8.7557E-
07],[8.0946,-9.3116E-07],[8.2869,-9.5683E-07],[8.4792,-9.5180E-
07],[8.6715,-9.1613E-07],[8.8638,-8.5040E-07],[9.0559,-7.5639E-
07],[9.248,-6.3637E-07],[9.436,-4.9721E-07],[9.624,-3.4082E-
07],[9.812,-1.7289E-07],[10,0]:
###Out-of-plane displacement###
w_r_ANSYS_q1:=[0,0.014547],[0.188,0.014537],[0.376,0.014507],[0.
564,0.014455],[0.752,0.014384],[0.9441,0.01429],[1.1362,0.014176
],[1.3462,0.014027],[1.5561,0.013854],[1.7484,0.013675],[1.9407,
0.013476],[2.133,0.013258],[2.3253,0.013022],[2.5176,0.012768],[
2.7099,0.012496],[2.9023,0.012208],[3.0946,0.011903],[3.2869,0.0
11583],[3.4792,0.011249],[3.6715,0.010901],[3.8638,0.01054],[4.0
561,0.010167],[4.2484,0.0097829],[4.4407,0.0093892],[4.633,0.008
9865],[4.8253,0.0085762],[5.0176,0.0081593],[5.2099,0.007737],[5
.4023,0.0073105],[5.5946,0.0068814],[5.7869,0.0064509],[5.9792,0
.0060204],[6.1715,0.0055913],[6.3638,0.0051653],[6.5561,0.004743
7],[6.7484,0.0043283],[6.9407,0.0039207],[7.133,0.0035226],[7.32
53,0.0031357],[7.5176,0.0027619],[7.7099,0.002403],[7.9023,0.002
0607],[8.0946,0.0017374],[8.2869,0.0014348],[8.4792,0.001155],[8
.6715,0.00090016],[8.8638,0.00067236],[9.0559,0.0047398],[9.248,
0.00030703],[9.436,0.00017633],[9.624,0.000080113],[9.812,0.0000
020453],[10,0]:
> ###Stress at the bottom of the plate### FEA_sigma_top_q1:=[0,1892.4],[0.376,1261.5],[0.752,1257.2],[1.13
62,1244.2],[1.5561,1222],[1.9407,1187.3],[2.3253,1146],[2.7099,1
095.6],[3.0946,1036.1],[3.4792,967.34],[3.8638,889.56],[4.2484,8
02.57],[4.633,706.35],[5.0176,601.07],[5.4023,486.43],[5.7869,36
2.63],[6.1715,229.61],[6.5561,87.371],[6.9407,-64.1],[7.3253,-
224.88],[7.7099,-394.92],[8.0946,-574.28],[8.4792,-
762.75],[8.8638,-960.49],[9.248,-1167.3],[9.624,-1383.8],[10,-
1603.5]:
###Stress at the top of the plate###
FEA_sigma_bot_q1:=[0,-1834],[0.376,-1141.7],[0.752,-
1137.6],[1.1362,-1125.1],[1.5561,-1103.8],[1.9407,-
1070.4],[2.3253,-1030.6],[2.7099,-982.15],[3.0946,-
924.77],[3.4792,-858.48],[3.8638,-783.35],[4.2484,-
699.23],[4.633,-606.03],[5.0176,-503.91],[5.4023,-
392.52],[5.7869,-272.03],[6.1715,-142.35],[6.5561,-
3.4267],[6.9407,144.78],[7.3253,302.4],[7.7099,469.39],[8.0946,6
45.85],[8.4792,831.6],[8.8638,1026.8],[9.248,1231.4],[9.624,1445
.8],[10,1663.6]:

122
These results were used for analyzing the limit of small displacement with the following
parameters:
Ran Geometrically Nonlinear in ANSYS 13.0
Material Properties: E=29000000, nu=0.3
Geometry Properties: a=10,t=0.1
Loading: q=0.1
> ###In-plane displacement### u_r_ANSYS_q01:=[0,0],[0.188,0.000000044265],[0.376,0.00000008815
9],[0.564,0.00000013132],[0.752,0.00000017337],[0.9441,0.0000002
1485],[1.1362,0.00000025445],[1.3462,0.00000029518],[1.5561,0.00
000033282],[1.7484,0.00000036425],[1.9407,0.0000003925],[2.133,0
.00000041731],[2.3253,0.00000043847],[2.5176,0.00000045579],[2.7
099,0.00000046913],[2.9023,0.00000047838],[3.0946,0.00000048346]
,[3.2869,0.00000048435],[3.4792,0.00000048106],[3.6715,0.0000004
7365],[3.8638,0.00000046221],[4.0561,0.00000044688],[4.2484,0.00
000042785],[4.4407,0.00000040535],[4.633,0.00000037963],[4.8253,
0.00000035101],[5.0176,0.00000031983],[5.2099,0.00000028647],[5.
4023,0.00000025134],[5.5946,0.0000002149],[5.7869,0.00000017762]
,[5.9792,0.00000013998],[6.1715,0.00000010249],[6.3638,0.0000000
65682],[6.5561,0.00000003007],[6.7484,-
0.0000000038189],[6.9407,-0.000000035464],[7.133,-
0.00000006437],[7.3253,-0.000000090055],[7.5176,-
0.00000011208],[7.7099,-0.00000013005],[7.9023,-
0.00000014363],[8.0946,-0.00000015252],[8.2869,-
0.00000015654],[8.4792,-0.00000015557],[8.6715,-
0.00000014962],[8.8638,-0.0000001388],[9.0559,-
0.00000012339],[9.248,-0.00000010376],[9.436,-
0.000000081043],[9.624,-0.000000055537],[9.812,-
0.000000028167],[10,0]:
###Out-of-plane displacement###
w_r_ANSYS_q01:=[0,0.0058748],[0.188,0.0058707],[0.376,0.0058582]
,[0.564,0.0058375],[0.752,0.0058086],[0.9441,0.0057707],[1.1362,
0.0057242],[1.3462,0.005664],[1.5561,0.005594],[1.7484,0.0055214
],[1.9407,0.005441],[2.133,0.0053528],[2.3253,0.0052572],[2.5176
,0.0051542],[2.7099,0.0050443],[2.9023,0.0049275],[3.0946,0.0048
043],[3.2869,0.0046748],[3.4792,0.0045395],[3.6715,0.0043987],[3
.8638,0.0042527],[4.0561,0.0041019],[4.2484,0.0039467],[4.4407,0
.0037875],[4.633,0.0036248],[4.8253,0.003459],[5.0176,0.0032905]
,[5.2099,0.0031199],[5.4023,0.0029476],[5.5946,0.0027743],[5.786
9,0.0026005],[5.9792,0.0024267],[6.1715,0.0022535],[6.3638,0.002
0815],[6.5561,0.0019114],[6.7484,0.0017439],[6.9407,0.0015794],[
7.133,0.0014189],[7.3253,0.0012629],[7.5176,0.0011122],[7.7099,0
.00096758],[7.9023,0.00082965],[8.0946,0.00069939],[8.2869,0.000
57751],[8.4792,0.00046485],[8.6715,0.00036223],[8.8638,0.0002705
3],[9.0559,0.00019068],[9.248,0.0001235],[9.436,0.000070919],[9.
624,0.000032217],[9.812,0.0000082239],[10,0]:

123
> ###Stress at the bottom of the plate### FEA_sigma_top_q01:=[0,496.51],[0.376,494.74],[0.752,489.51],[1.1
362,480.51],[1.5561,466.46],[1.9407,449.75],[2.3253,429.4],[2.70
99,405.35],[3.0946,377.61],[3.4792,346.24],[3.8638,311.18],[4.24
84,272.44],[4.633,230.07],[5.0176,183.98],[5.4023,134.24],[5.786
9,80.841],[6.1715,23.78],[6.5561,-36.943],[6.9407,-
101.36],[7.3253,-169.44],[7.7099,-241.22],[8.0946,-
316.6],[8.4792,-395.64],[8.8638,-478.28],[9.248,-
564.75],[9.624,-652.4],[10,-744.35]:
###Stress at the top of the plate###
FEA_sigma_bot_q01:=[0,-476.96],[0.376,-475.22],[0.752,-
470.07],[1.1362,-461.21],[1.5561,-447.39],[1.9407,-
430.93],[2.3253,-410.89],[2.7099,-387.19],[3.0946,-
359.86],[3.4792,-328.92],[3.8638,-294.33],[4.2484,-
256.08],[4.633,-214.24],[5.0176,-168.68],[5.4023,-
119.48],[5.7869,-66.623],[6.1715,-
10.103],[6.5561,50.088],[6.9407,113.99],[7.3253,181.57],[7.7099,
252.88],[8.0946,327.81],[8.4792,406.45],[8.8638,488.71],[9.248,5
74.83],[9.624,662.19],[10,753.87]:
End of Finite Element Results
Exact Solution from Linear Theory
Inputting the exact solution found from the linear theory as a comparison to the thesis solution.
> w_linear:=r->1/64/D11*q*r^4-1/32*a^2*q/D11*r^2+1/64/D11*q*a^4;
1-parameter solution (Current Study)
Assigning polynomials to the out of plane and in plane displacement functions:
> ##Step 1. Input Assumed Displacement Functions:
w:=r->(1-r^2/a^2)^2*(A0);
u:=r->(r/a)*(1-(r/a)^2)*(B0+B1*(r/a)^2);
:= w_linear → r − + 1
64
q r4
D11
1
32
a2 q r2
D11
q a4
64 D11
:= w → r
− 1
r2
a2
2
A0
:= u → r
r
− 1
r2
a2
+ B0
B1 r2
a2
a

124
Integrating the Total Potential Energy Equation:
> ##Step 2. Input Total Potential Energy Equation:
TPE1:=int(Pi*D11*(r*diff(w(r),r,r)^2+1/r*diff(w(r),r)^2+2*nu*dif
f(w(r),r)*diff(w(r),r,r))+Pi*E*t/(1-
nu^2)*((diff(u(r),r)+1/2*(diff(w(r),r)^2))^2*r+u(r)^2/r+2*nu*u(r
)*(diff(u(r),r)+1/2*diff(w(r),r)^2))
-2*Pi*q*w(r)*r,r=0..a):
D11:=E*t^3/12/(1-nu^2):
Taking the derivative of each coefficient.
This will result in a set of nonlinear equations that can be solved by using Groebner Basis.
> ##Step 3. Make Equations for each unknown taking the
##derivative with respect to that unknown
eqA0:=diff(TPE1,A0):
eqB0:=diff(TPE1,B0):
eqB1:=diff(TPE1,B1):
Developing a set to run a Groebner Basis on.
> ##Step 4. Make a set of the unknown equations
WL:=[eqA0,eqB0,eqB1]:
Running the Basis function in Maple will run a Groebner Basis on the WL Set
> ##Step 5. Run the Groebner Basis Algorithm
GB:=Basis(WL,lexdeg([B1,B0],[A0])):
The map function will show what variables are in each of the equations found in first the "WL"
set and second the "GB" set
> ##Step 5a. (Optional) Check original set and Groebner Basis set
##to insure the system of equations are decoupled
map(indets,WL);
map(indets,GB);
Notice that in the "GB" set equation 1 b111 and b121 are removed and only a111 remains.
Notice that in the "GB" set equation 2 b121 is removed and a111, b111 remain.
Notice that in the "GB" set equation 3 b111 is removed and a111, b121 remain.
[ ], ,{ }, , , , , , ,A0 B0 B1 E a ν q t { }, , , , , ,A0 B0 B1 E a ν t { }, , , , , ,A0 B0 B1 E a ν t
[ ], ,{ }, , , , ,A0 E a ν q t { }, , ,A0 B0 a ν { }, , ,A0 B1 a ν

125
Now that the equations are decoupled the a111 can be found in the first equation and substituted
into the next equations to find b111 and b121.
> ##Step 6. Solve the system of equations
A00:=solve(GB[1],A0):
A00:=simplify(remove(has,[A00],I)):
A0:=A00[1]:
B00:=solve(GB[2],B0):
B00:=simplify(remove(has,[B00],I)):
B0:=B00[1]:
B10:=solve(GB[3],B1):
B10:=simplify(remove(has,[B10],I)):
B1:=B10[1]:
> ############################################################### ###############################################################
###### ######
###### SOLUTION IS SOLVED ######
###### NOW PLOTTING RESULTS ######
###### ######
###############################################################
###############################################################
>
>
Results
The thesis solution is compared to the finite element model and the exact solution
> ##Inputting Radial Stress Functions which are used in the graphs below for stress
##The first 3 equations are for the thesis solution
epsilon[rr]:=-
z*(diff(w(r),r,r))+diff(u(r),r)+1/2*(diff(w(r),r)^2):
epsilon[tt]:=-z*diff(w(r),r)/r+u(r)/r:
sigma[rr]:=E/(1-nu^2)*(epsilon[rr]+nu*epsilon[tt]):
> ##The next 3 equations are for the exact solution epsilon_linear[rr]:=-(z)*(diff(w_linear(r),r,r)):
epsilon_linear[tt]:=-(z)*1/r*diff(w_linear(r),r):
sigma_linear[rr]:=E/(1-
nu^2)*(epsilon_linear[rr]+nu*epsilon_linear[tt]):
>
SMALL DISPLACEMENTS (q=0.1, wmax_exact/t = .06)
We are going to start off by checking the solution for a small displacement exact where the exact
solution from the linear theory at the center of the plate (wmax_exact) over the thickness is much
greater than 0.5

126
> ##Plotting the transverse displacement
plot1:=plot([subs(param_q01,w_linear(r))],r=0..10,linestyle=dash
dot,color=grey,legend=["Linear Theory"],labels=[`r`,`w`]):
plot2:=plot([subs(param_q01,w(r))],r=0..10,legend=["Current
Study"],labels=[`r`,`w`]):
plot3:=plot([w_r_ANSYS_q01],style=point,symbolsize=15,symbol=dia
mond,color=green,legend=["ANSYS"],labels=[`r`,`w`]):
> display([plot1,plot2,plot3],axes=boxed,title=`Transverse Displacement for Linear Solution, Current Study & ANSYS
w_linear/t=.06 (Small Displacement Example) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting the in-plane displacement
##Only finite element and thesis solution plotted because
##in-plane displacement for exact solution at the middle plane
##is zero
plot5:=plot([subs(param_q01,u(r))],r=0..10,legend=["Current
Study"]):
plot6:=plot([u_r_ANSYS_q01],style=point,symbolsize=15,symbol=dia
mond,color=green,legend=["ANSYS"]):

127
> display(plot5,plot6,implicitplot(y=0,x=0..10,y=-0.05..0.05, color=black,legend=`Axis Line`),axes=boxed,title=`In-Plane
Displacement for Linear Solution, Current Study and ANSYS
w_linear/t=.06 (Small Displacement Example) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting Top, Bottom & Middle Plane Radial Stress
sig_plot_nl_top01:=plot(subs(param_q01,subs(z=t/2,sigma[rr])),r=
0..10, legend=`Current Study z=Top`):
sig_plot_nl_bot01:=plot(subs(param_q01,subs(z=-
t/2,sigma[rr])),r=0..10,legend=`Current Study z=Bottom`):
sig_plot_nl_mid01:=plot(subs(param_q01,subs(z=0,sigma[rr])),r=0.
.10,legend=`Current Study z=Midplane`):
sig_plot_FEA_top01:=plot([FEA_sigma_top_q01],style=point,symbols
ize=15,symbol=diamond,color=green,legend=["ANSYS z=Top"]):
sig_plot_FEA_bot01:=plot([FEA_sigma_bot_q01],style=point,symbols
ize=15,symbol=diamond,color=green,legend=["ANSYS z=Bottom"]):
sig_plot_l_top01:=plot(subs(param_q01,subs(z=t/2,sigma_linear[rr
])),r=0..10,color=grey,linestyle=dashdot,legend=`Linear Theory
z=Top`):

128
sig_plot_l_bot01:=plot(subs(param_q01,subs(z=-
t/2,sigma_linear[rr])),r=0..10,color=grey,linestyle=dashdot,lege
nd=`Linear Theory z=Bottom`):
display(sig_plot_nl_top01,sig_plot_nl_bot01,sig_plot_nl_mid01,si
g_plot_l_top01,sig_plot_l_bot01,sig_plot_FEA_top01,sig_plot_FEA_
bot01,implicitplot(y=0,x=0..10,y=-0.05..0.05,
color=black,legend=`Axis Line`),axes=boxed,title=`In-Plane
Displacement for Linear Solution, Current Study and ANSYS
w_linear/t=.06 (Small Displacement Example) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
The results for the small displacement show that the results for displacement and stress match
closely.

129
LIMIT OF SMALL DISPLACEMENT (q=0.25, wmax_exact/t
= .5)
Checking the thesis results compared to finite element model and exact solution at the threshold
between small and large displacement
> plot1:=plot([subs(param_q1,w_linear(r))],r=0..10,color=grey, linestyle=dashdot,legend=["Linear Theory"]):
plot2:=plot([subs(param_q1,w(r))],r=0..10,legend=["Current
Study"]):
plot3:=plot([w_r_ANSYS_q1],style=point,symbolsize=15,symbol=diam
ond,color=green,legend=["ANSYS"]):
> display([plot1,plot2,plot3],axes=boxed,title=`Transverse
Displacement for Linear Solution, Current Study and ANSYS
w_linear/t=.5 (Limit of Small Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting the in-plane displacement ##Only finite element and thesis solution plotted because
##in-plane displacement for exact solution at the middle plane
##is zero
plot5:=plot([subs(param_q1,u(r))],r=0..10,legend=["Current
Study"]):

130
plot6:=plot([u_r_ANSYS_q1],style=point,symbolsize=15,symbol=diam
ond,color=green,legend=["ANSYS"]):
display(plot5,plot6,implicitplot(y=0,x=0..10,y=-0.05..0.05,
color=black,legend=`Axis Line`),axes=boxed,title=`In-plane
Displacement for Linear Solution, Current Study and ANSYS
w_linear/t=.5 (Limit of Small Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting Top, Bottom & Middle Plane Radial Stress
sig_plot_nl_top1:=plot(subs(param_q1,subs(z=t/2,sigma[rr])),r=0.
.10,legend=`Current Study z=Top`):
sig_plot_nl_bot1:=plot(subs(param_q1,subs(z=-
t/2,sigma[rr])),r=0..10,legend=`Current Study z=Bottom`):
sig_plot_nl_mid1:=plot(subs(param_q1,subs(z=0,sigma[rr])),r=0..1
0,legend=`Current Study z=Midplane`):
sig_plot_FEA_top1:=plot([FEA_sigma_top_q1],style=point,symbolsiz
e=15,symbol=diamond,color=green,legend=["ANSYS z=Top"]):
sig_plot_FEA_bot1:=plot([FEA_sigma_bot_q1],style=point,symbolsiz
e=15,symbol=diamond,color=green,legend=["ANSYS z=Bottom"]):
sig_plot_l_top1:=plot(subs(param_q1,subs(z=t/2,sigma_linear[rr])
),r=0..10,color=grey,linestyle=dashdot,symbol=diamond,legend=`Li
near Theory z=Top`):

131
sig_plot_l_bot1:=plot(subs(param_q1,subs(z=-
t/2,sigma_linear[rr])),r=0..10,color=grey,linestyle=dashdot,symb
ol=diamond,legend=`Linear Theory z=Bottom`):
display(sig_plot_nl_top1,sig_plot_nl_bot1,sig_plot_nl_mid1,sig_p
lot_l_top1,sig_plot_l_bot1,sig_plot_FEA_top1,sig_plot_FEA_bot1,i
mplicitplot(y=0,x=0..10,y=-0.05..0.05, color=black,legend=`Axis
Line`),axes=boxed,title=`Radial Stress for Linear Solution,
Current Study and ANSYS
w_linear/t=.5 (Limit of Small Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
The results at the limit of small displacement show that the results for displacement and stress
match closely.
LARGE DISPLACEMENTS q=5, wmax_exact/t = 3
Checking the thesis results compared to finite element model and exact solution at a large
displacement where wmax_exact/t >> 0.5
> plot1:=plot([subs(param_q5,w_linear(r))],r=0..10,color=grey, linestyle=dashdot,legend=["Linear Theory"]):

132
plot2:=plot([subs(param_q5,w(r))],r=0..10,legend=["Current
Study"]):
plot3:=plot([w_r_ANSYS_q5],style=point,symbolsize=15,symbol=diam
ond,color=green,legend=["ANSYS"]):
> display([plot1,plot2,plot3],axes=boxed,title=`Transverse
Displacement for Linear Solution, Current Study and ANSYS
w_linear/t=3 (Large Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting the in-plane displacement ##Only finite element and thesis solution plotted because in-
plane displacement for exact solution at the middle plane is
zero
plot5:=plot([subs(param_q5,u(r))],r=0..10,legend=["Current
Study"]):
plot6:=plot([u_r_ANSYS_q5],style=point,symbolsize=15,symbol=diam
ond,color=green,legend=["ANSYS"]):
display(plot5,plot6,implicitplot(y=0,x=0..10,y=-0.05..0.05,
color=black,legend=`Axis Line`),axes=boxed,title=`In-plane
Displacement for Linear Solution, Current Study and ANSYS

133
w_linear/t=3 (Large Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
> ##Plotting Top, Bottom & Middle Plane Radial Stress
sig_plot_nl_top1:=plot(subs(param_q5,subs(z=t/2,sigma[rr])),r=0.
.10,legend=`Current Study z=Top`):
sig_plot_nl_bot1:=plot(subs(param_q5,subs(z=-
t/2,sigma[rr])),r=0..10,legend=`Current Study z=Bottom`):
sig_plot_nl_mid1:=plot(subs(param_q5,subs(z=0,sigma[rr])),r=0..1
0,legend=`Current Study z=Midplane`):
sig_plot_FEA_top1:=plot([FEA_sigma_top_q5],style=point,symbolsiz
e=15,symbol=diamond,color=green,legend=["ANSYS z=Top"]):
sig_plot_FEA_bot1:=plot([FEA_sigma_bot_q5],style=point,symbolsiz
e=15,symbol=diamond,color=green,legend=["ANSYS z=Bottom"]):
sig_plot_l_top1:=plot(subs(param_q5,subs(z=t/2,sigma_linear[rr])
),r=0..10,color=grey,linestyle=dashdot,symbol=diamond,legend=`Li
near Theory z=Top`):
sig_plot_l_bot1:=plot(subs(param_q5,subs(z=-
t/2,sigma_linear[rr])),r=0..10,color=grey,linestyle=dashdot,symb
ol=diamond,legend=`Linear Theory z=Bottom`):

134
display(sig_plot_nl_top1,sig_plot_nl_bot1,sig_plot_nl_mid1,sig_p
lot_l_top1,sig_plot_l_bot1,sig_plot_FEA_top1,sig_plot_FEA_bot1,i
mplicitplot(y=0,x=0..10,y=-0.05..0.05, color=black,legend=`Axis
Line`),axes=boxed,title=`Radial Stress for Linear Solution,
Current Study and ANSYS
w_linear/t=3 (Large Displacement) (Case
1)`,font=[TIMES,ROMAN,15],titlefont=[TIMES,ROMAN,15]);
The results for large displacement show that the results for displacement and stress do not match
closely.

135
APPENDIX E
ANSYS LOG FILE CASE 3 IMMOVABLE SUPPORTED PLATE WITH OVERHANG

136
/BATCH
/FILNAME,loadstudy--case3-dist1,0 !Create a filename
!
!Change 'D:\Office Thesis--CPT\...\loadstudy--case3-!dist1' to a folder location on your
!computer. This will be the location you find the finite element model
!and all resulting solutions
!
/CWD,'D:\Office Thesis--CPT\Case 3--Overhang\Distributed Load\ANSYS\Results\loadstudy--
case3-dist1' !Sets current working directory
/PREP7 !Start Preprocessor
ET,1,SHELL93 !Selecting the element
R,1,0.1,0.1,0.1,0.1, , ,
KEYW,PR_STRUC,1 !Setting Structural Analysis
!!!!!!!!!Material Data!!!!!!!!!!!
MPTEMP,,,,,,,,
MPTEMP,1,0
MPDATA,EX,1,,29000000 !Elastic Modulus (using Steel)
MPDATA,PRXY,1,,0.3 !Poisson's Ratio
MPTEMP,,,,,,,,
MPTEMP,1,0
MPDE,EX,1
MPDE,PRXY,1
MPDATA,EX,1,,29000000
MPDATA,PRXY,1,,0.3
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!Creating Quarter Circle Geometry!!!!!!
CYL4,0,0,10,0,10,90
CYL4,0,0,10,0,15,90 !These two lines create the quarter circle segment from 0 to 90
FLST,2,2,5,ORDE,2
FITEM,2,1
FITEM,2,-2
AGLUE,P51X
FLST,2,6,4,ORDE,4
FITEM,2,1
FITEM,2,-4
FITEM,2,8
FITEM,2,-9 !These lines are selections of lines created
LGLUE,P51X
MSHAPE,0,2D
MSHKEY,0
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!Meshing the geometry!!!!!!
FLST,5,2,5,ORDE,2
FITEM,5,1
FITEM,5,3
CM,_Y,AREA

137
ASEL, , , ,P51X
CM,_Y1,AREA
CHKMSH,'AREA'
CMSEL,S,_Y
SMRT,2 !Setting Automesh 10 is most coarse mesh
! 1 is most fine mesh
AMESH,ALL !Meshing everything in the model,
!the only object in the model
!is the circular plate
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
EPLOT !Plotting the mesh
/UI,COPY,SAVE,PNG,GRAPH,COLOR,REVERSE,PORTRAIT,YES !Saving the plot to a
picture file (PNG)
FINISH
!!!!!!!!!Boundary Conditions!!!!!!!!!!!!
/SOL
FLST,2,4,4,ORDE,4 !Selecting lines to have boundary conditions applied
FITEM,2,2
FITEM,2,-3
FITEM,2,8
FITEM,2,-9
DL,P51X, ,SYMM !Applying symmetric boundary conditions
FLST,2,1,4,ORDE,1
FITEM,2,1
/GO
DL,P51X, ,UX,0.0 !Applying the immovable boundary constraints
FLST,2,1,4,ORDE,1
FITEM,2,1
!*
/GO
DL,P51X, ,UY,0 !Applying the immovable boundary constraints
FLST,2,1,4,ORDE,1
FITEM,2,1
!*
/GO
DL,P51X, ,UZ,0 !Applying the out of plane boundary constraints
FLST,2,1,5,ORDE,1
FITEM,2,1
/GO
SFA,P51X,1,PRES, 0.100000 !Applying Pressure Load
!!!!!!!!!!!!!!Analysis Type!!!!!!!!!!!!!!
NLGEOM,1 !NLGEOM,1 indicates to run for large displacements
NROPT,AUTO, ,
STAOPT,DEFA

138
LUMPM,0
EQSLV, , ,0, ,DELE
PRECISION,0
MSAVE,0
PCGOPT,0, ,AUTO, , ,AUTO
PIVCHECK,1
SSTIF
PSTRES
TOFFST,0,
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
SOLVE !Running the ANSYS solver
!!!!!!!!!!!!!!!!!!!!!!Post processing!!!!!!!!!!!!!!!!!!!!
FLST,5,2,4,ORDE,2
FITEM,5,3
FITEM,5,8
LSEL,R, , ,P51X
CM,CM_1,LINE
CMSEL,A,CM_1
CMSEL,S,CM_1
NSLL,S,1
CM,CM_2,NODE
/POST1
/EFACET,1
PLNSOL, U,X, 0,1.0 !Contour plot of in-plane displacement
/UI,COPY,SAVE,PNG,GRAPH,COLOR,REVERSE,PORTRAIT,YES
/EFACET,1
PLNSOL, U,Z, 0,1.0 !Contour plot of out-of-plane displacement
/UI,COPY,SAVE,PNG,GRAPH,COLOR,REVERSE,PORTRAIT,YES
/VIEW,1,,1
/ANG,1
/REP,FAST
/UI,COPY,SAVE,PNG,GRAPH,COLOR,REVERSE,PORTRAIT,YES
PLESOL, S,X, 0,1.0 !Contour plot of stress
/VIEW,1,,,1
/ANG,1
/REP,FAST
/UI,COPY,SAVE,PNG,GRAPH,COLOR,REVERSE,PORTRAIT,YES
/output,ELE_X,txt
elist,all,,,0,0 !Outputting elements to text file "ELE_X.txt"
/out
CMSEL,A,CM_2
/output,U_X,txt !Outputting in-plane displacements to text file "U_X.txt"
PRNSOL,U,X
/out

139
/output,U_Z,txt !Outputting out-of-plane displacements to text file "U_Z.txt"
PRNSOL,U,Z
/out
/output,U_Z,txt
PRNSOL,U,Z
/out
/output,Stress,txt
PRNSOL,S,COMP !Outputting stress results to text file "Stress.txt"
/out
/output,NODES,txt
NLIST,ALL, , , ,NODE,NODE,NODE
/out !Outputting node geometry values to text file "Nodes.txt"
SAVE,loadstudy--case3-dist1,db

140
APPENDIX F
RITZ METHOD COEFFICIENTS EQUATIONS AND GROEBNER BASIS EQUATIONS
FROM CASE 2 AND CASE 3

141
Case 2 Ritz approximation equations:
��S0 = − ¨3465(( − 1)( + 1)� (−4��S¬(−1540�(( * + 10 ( + 24 + 22)+ 20317�¬ + 8034�1+ 1155� #( � + 10 # + 23 * + 12 ( − 17 − 22)+ 4��S¬(10780�( + 1056S¬((494 + 939)− 11 �¬(3243 + 622 ) + 2 *�1(71 ( + 887 + 3498)+ 11 *�¬(41 ( + 405 + 1138) + 14!�1(86 − 871)− 8085�#) ���0 = − ¨��630( # + 2 * − 2 − 1) p4 (S¬((41 + 323) + 126�1(1 + )(+ 315�¬(1 + )( + 4S¬((451 − 1847)Ö ���1 = − ¨��13860( # + 2 * − 2 − 1) p16 (S¬((71 + 745) + 2145�1(1 + )(+ 2772�¬(1 + )( + 208S¬((149 − 309)Ö
(F.1)
Case 2 Computed Groebner Basis equations:
C�»1¼ = −12665155�#( + 7)( − 1)( + 1)#− 670214160��*S¬( + 7)( + 1)* + 16��S¬*(6696449 �+ 99521302 � + 478692103 # + 67588516 * − 6799490129 (− 20445519770 − 14008216855) C�»2¼ = 108801�¬(1 + )( + S¬((69548 * + 423140 ( − 11804 − 2582996) C�»3¼ = 5181�1(1 + )( − S¬((−1536 * + 2752 ( + 75584 + 3712)
(F.2)

142
Case 3 Ritz approximation equations:
��S0 = ¨��((672��(�� *�1S¬�# + 1008��(�� *�¬S¬�#+ 1472�(��S¬�1 *� − 47251#S¬*�(�( �− 236251#S¬*�(�( # + 236251#S¬*�(�( ( + 47251#S¬*�(�(+ 2673�(S¬*� � − 2673�(S¬*� # − 2673�(S¬*� (+ 2673�(S¬*� − 4480��(� − 3360(���(�+ 2392�(��S¬�¬ *� − 7296*�(��S¬�¬��− 4464*�(��S¬�1�� − 4456�(��S¬�¬� − 2432�(��S¬�1�+ 512�(��S¬�1� ( − 2016��(���1S¬�#− 3360��(���1S¬�# ( − 3024��(���¬S¬�#− 5040��(���¬S¬�# ( − 1968*�(��S¬�1 *��− 3072*�(��S¬�1 *�� − 238141¬�(S¬*�� (+ 238141¬�(S¬*�� # − 79381¬�(S¬*�� � + 90721(S¬*�(�#− 90721(S¬*�(�# ( − 90721(S¬*�(�# # + 90721(S¬*�(�# �+ 141751��(S¬* # − 189001��(S¬* * + 141751��(S¬* (− 56701��(S¬* + 189001#S¬*�( ��( + 5346�(S¬* ��+ 9451��(S¬* � − 56701��(S¬* � + 9451��(S¬*− 189001#S¬*�( �( − 10692�(S¬* *� + 5346�(S¬* �− 18144 �1(S¬*�(�# + 36288 *1(S¬*�(�# − 18144 1(S¬*�(�#+ 79381¬�(S¬*�� + 3360(S¬ ���(� − 3360(S¬ *���(�− 3360(S¬ (���(� + 2800S¬��(� + 3360(S¬���(�+ 1680#S¬�#�(� − 8960 ��(� − 4480 (��(�+ 3360( (���(� − 1680#S¬ (�#�(� + 1680#S¬ *�#�(�+ 1680S¬ *��(� − 1680#S¬ �#�(� + 7280S¬ ��(�+ 6160S¬�J(��(� + 4464*�(�� (S¬�1��+ 7296*�(�� (S¬�¬�� − 6520�(��S¬�¬ �+ 328�(��S¬�¬ (� + 1968*�(��S¬�1 ��+ 3072*�(��S¬�¬ �� + 4704��(�� �1S¬�#+ 7056��(�� �¬S¬�# − 3392�(��S¬�1 �)( − 1)/(17920( + 1)��11�*) ���0 = − ¨4480 (−384% ��(S¬(�( + 299� ��(S¬(�# + 12611 ��(S¬(− 88211�(S¬( # − 557��(S¬(�# # + 1680%�(S¬(�( #− 1824%�(S¬( *�( − 598��(S¬^2 *�# + 226811 *�(S¬(− 277211�(S¬( ( + 1114��(S¬(�# ( − 768%�(S¬(�( (+ 2208%�(S¬( �( + 299��(S¬( �# + 163811 �(S¬(− 557��(S¬(�# + 1344�(���1�# − 37811�(S¬(+ 2240�(���¬�# − 912%�(S¬(�()/(����#( ( − 1)) ���1 = −¨/6720 ∗ (−369% ��(S¬(�( + 276� ��(S¬(�# + 12611 ��(S¬(− 88211�(S¬( # − 456��(S¬(�# # + 1575%�(S¬(�( #− 1674%�(S¬( *�( − 552��(S¬( *�# + 226811 *�(S¬(− 277211�(S¬( ( + 912��(S¬(�# ( − 738%�(S¬(�( (+ 2043%�(S¬( �( + 276��(S¬( �# + 163811 �(S¬(− 456��(S¬(�# + 1568�(���1�# − 37811�(S¬(+ 2016�(���¬�# − 837%�(S¬(�()/(����#( ( − 1))
(F.3)

143
Case 3 Computed Groebner Basis equations:
C�»1¼ = 16405201#S¬*�(�( � + 50274001#S¬*�(�( # − 56624401#S¬*�(�( (− 10054801#S¬*�(�( − 385411�(S¬*� �+ 83397�(S¬*� # + 989439�(S¬*� ( − 687425�(S¬*�+ 2007040��(� + 1505280(���(� + 57948841¬�(S¬*�� (− 57683881¬�(S¬*�� # + 19139641¬�(S¬*�� �− 20808001(S¬*�(�# + 13232161(S¬*�(�# (+ 35493121(S¬*�(�# # − 27917281(S¬*�(�# �− 33075001��(S¬* # + 41013001��(S¬* *− 29370601��(S¬* ( + 11377801��(S¬* − 48157201#S¬*�( ��( − 1587601#A¬*�(ν��(+ 11351881¬�(S¬* ��� − 3695641¬�(S¬*ν���− 1502913�(A¬*ν�� + 143359�(S¬* ��− 3439801��(S¬*ν� + 15082201��(S¬*ν� + 264601��(A¬*ν�− 1852201��(S¬* + 7938001#S¬*�(ν*�( + 41806801#A¬*�(ν�(− 11616841¬�(S¬*ν*�� + 3960601¬�(S¬*ν��+ 2575749�(A¬*ν*� − 1216195�(S¬*ν�+ 361296ν�1(A¬*�(�# + 3765312ν�1(A¬*�(�#− 8661168ν*1(A¬*�(�# + 4534560ν1(A¬*�(�#− 19404601¬�(S¬*�� + 1505280(S¬ν(���(�− 1254400A¬��(� − 1505280(S¬���(�− 752640#S¬�#�(� + 2007040ν��(� − 1505280( ���(�− 752640#S¬ν(�#�(� + 1505280#A¬ν�#�(�− 2007040A¬ν��(� − 752640A¬ν(��(�
C�»2¼ = 12611 ��(S¬( − 88211�(S¬( # + 226811 *�(S¬( − 277211�(S¬( (+ 163811 �(S¬( − 37811�(S¬( − 474% ��(S¬(�(+ 2310%�(S¬(�( # − 2724%�(S¬( *�( − 948%�(S¬(�( (+ 3198%�(S¬( �( − 1362%�(S¬(�( + 437� ��(S¬(�#− 1163��(S¬(�# # − 874��(S¬( *�# + 2326��(S¬(�# (+ 437��(S¬( �# − 1163��(S¬(�# + 3584�(���¬�#
C�»3¼ = 12611 ��(S¬( − 88211�(S¬( # + 226811 *�(S¬( − 277211�(S¬( (+ 163811 �(S¬( − 37811�(S¬( − 234% ��(S¬(�(+ 630%�(S¬(�( # − 324%�(S¬( *�( − 468%�(S¬(�( (+ 558%�(S¬( �( − 162%�(S¬(�( + 69� ��(S¬(�#+ 453��(S¬(�# # − 138��(S¬( *�# − 906��(S¬(�# (+ 69��(S¬( �# + 453��(S¬(�# + 3584�(���1�#
`
(F.4)

144
APPENDIX G
STRESS IN THETA DIRECTION AND TRANSVERSE SHEAR PROFILE FOR EACH
CASE

145
Case 1 Stress in Theta Direction:
Figure G.1: Case 1: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29 and = 0.3)
< 44/<���
"/
� = − �2 � = + �2 � = 0

146
Case 1 Transverse Shearing Force:
Figure G.2: Case 1: Transverse Shearing Profile (�#/(��#) = 500/29 and = 0.3)
"/
I 3/I���

147
Case 2 Stress in Theta Direction:
Figure G.3: Case 2: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29 and = 0.3)
� = − �2 � = + �2 � = 0
"/
< 44/<���

148
Case 2 Transverse Shearing Force:
Figure G.4: Case 2: Transverse Shearing Profile (�#/(��#) = 500/29 and = 0.3)
I 3/I���
"/

149
Case 3 Stress in Theta Direction:
Figure G.5: Case 3: Stress in Theta Direction Profile through the Thickness (�#/(��#) =500/29, �/ = 1.5, and = 0.3)
< 44/<���
"/
� = − �2 � = + �2 � = 0

150
Case 3 Transverse Shearing Force:
Figure G.6: Case 3: Transverse Shearing Profile (�#/(��#) = 500/29, �/ = 1.5, and =0.3)
"/
I 3/I���

151
VITA
Timothy M. Harrell was born in Philadelphia, Pennsylvania on November 20, 1986. He
attended elementary school at St. Bernard’s Catholic School. In 1998, he and his family moved to
Winston-Salem, North Carolina, where he began middle school. In the middle of 8th grade year,
he and his family moved to Hendersonville, Tennessee where he attended and graduated from
Ellis Middle School. He attended Hendersonville High School in June 2005, where he received
many honors including the President’s award as well as participating in many extracurricular
activities including being the president of Future Business Leaders of America (FBLA). The
following August he started at Tennessee Technological University and in December 2010
graduated cum laude and received a Bachelors of Science degree in Civil Engineering with a
concentration in structural mechanics. He then enrolled at Tennessee Technological University
for the Master’s program and graduated in August 2014 with a Masters of Science in Civil
Engineering with a focus in structural mechanics.