Embed Size (px)
Citation preview
AN EVALUATION OF SPACE PLANNING METHODOLOGIES
Elliott E. Dudnik
Assistant Professor of Architecture University of I I linois at Chicago Circle Department of Architecture Chicago, Illinois 60680
Robert Krawczyk
C. F. Murphy and Associates Chicago, Illinois
Abstract
8.2
Whi Ie numerous algorithms and approaches have been suggested and applied to the problem of space-planning there has not been any systematic comparison or evaluation of these methods. Such an evaluation is important because the spatial configurations produced by such methods vary considerably. In this paper the major space planning techniques, as wei I as several new approaches and modifications to existing methods, are described, compared and evaluated. The use and consequences of certain options and/or modifications to the basic methods are included and evaluated. The results for each method using an identical problem are given, indicating the comparative speed and optimality of each approach, as wei I as the final plans generated. The implications of these results and their relationship to the design process are discussed.
I ntroducti on The past decade has seen a variety of techniques for evaluating and/or automating the space planning process. To a great extent, these al location techniques have become very fami liar to many des i gners and the i r uti Ii zat i on has become more wi despread. Design literature consistently includes applications, extensions, or computer program descriptions which rely on any number of different space al location algorithms. The resulting spatial configurations or floor plans are generally presented with discussion reserved only for the end product. Usually, a particular algorithm has been implemented, with certain other related decisions inherent to the chosen approach, and the system or solutions bui It up from this initial decision. There is little explanation, however, as to why the particular technique has been chosen nor why certain secondary decisions related to the implementation of this approach have been made. The results of any of the many different techniques are not, however, the same. Even the secondary decisions that arise as a consequence ~any algorithm yield widely varying solutions. It has, however, rarely been the case where the results or consequences of using each of the different approaches have been carefully evaluated, analyzed or compared.
This paper takes each of the many space al location techniques avai table plus several new approaches and compares and evaluates them with respect to one another.
414
8. SPACE PLANNING TECHNIQUES I 415
:~1tical example problems are used to clearly demonstrate the differences in re-_ ts that occur in each case. Comparisons are made of computing time as wei I as -,s "scores" of each resulting solution. For every technique used, all possible 5~:-options are explained and demonstrated to clearly illustrate the consequences 27 their use. Thus, when the random generating approach is discussed, the implica-7ions of a technique which randomly assigns locations to spaces is compared to one -nat switches locations of two randomly chosen spaces and also to one that only per+orms the switch if the new random location is within a chosen distance of other slements. Simi larly, various approaches and options within the framework of assign~ent techniques are discussed and compared to one another. Thus, one may see the consequences of various approaches or ru les to the spati a I locati on and choi ce of sach incoming element to the plan and/or its dependence toward any or all previously i ocated elements. A I I app roaches a re eva I uated an d compa red to one anothe r, and not only to their related generic types.
The purpose of this paper is to both clearly define and illustrate the various techniques avai lable for space planning, to carefully and systematically demonstrate the differences that arise from use of each method, and to evaluate these results. This paper shows that the initial choice of algorithm does have a profound affect upon the resulting design and that the consequences are such as to warrant more serious consideration of certain methods for particular situations. This paper also, in illustrating these techniques presents several new approaches, extensions and modifications of space planning algorithms, heretofore, not presented in the literature. These new techniques are clearly recognizable as logical extension of the choices or decisions that would occur during the manual design process but ignored or avoided previously in the automation of the process.
A Review of Space Planning Techniques A number of space-planning or al location methods have, at various times, been developed or presented. For the past ten years, design literature has contained many appl ications of space-planning techniques as well as extensions of these methods. Comprehensive summaries of these various approaches are given by Mitchel 1(1) and Eastman(2). Mitchell not only provides an extensive bibliography of space-planning, but also a systematic summary and taxonomy of space-planning techniques which wi II be referred to in this paper.
With few exceptions, the bulk of space-planning techniques fal I into the category of assignment techniques. Essentially, this is an approach which considers the spaceplanning problem as a combinatorial problem of assigning the various required spatial elements to discrete locations or modules in the avai lable space in such a way as to satisfy a given set of constraints and to optimize some objective function. In general, this objective function relates to the distance between elements and some type of interaction function. This interaction may be expressed as one or more weighted values with either an objective (travel cost, trip volume) or subjective (relative importance, observed hierarchy) basis.
Whi Ie other approaches to space-planning have begun to emerge recently, many of these are either stil I in conceptual form and have not been implemented successfully or may not necessari Iy seek to optimize or improve upon a plan. An example of the former may be found in Grason's proposal(3) for use of graph theory, which seems
416 / ENVIRONMENTAL DESIGN RESEARCH, VOL. 1
only successful for small planar gra§hs. As for the latter situation, the overlay techniques used by Grant(4) or Ward( ) locate elements on the basis of greatest "utility" or "suitability", but this in fact does not seek to improve the relationships between the parts of the plan as much as it seeks to resolve conflicts between the avai lable space and each individual element. The work of Johnson, et al (6) appears closer to resolving the difficulty of other techniques by being best able to internally represent the relationships, the boundary conditions, and geometry of the elements and the space. At present the major difficulty appears to be the large amounts of computer storage and time requi red for solution and the absence of a "closed-form" problem, thereby preventing the possibi lity of obtaining a single "best" solution but rather producing several alternative results.
One returns, therefore, to consideration of the large group of assignment techniques. They are important for a number of reasons. First, the bulk of work and literature is centered in this area, mainly because of the relative ease of problem statement and structure. Secondly, the algorithms that can be and have been developed for obtaining solutions by these approaches are such that computation time is generally extremely fast. This has generally led to continued reliance upon and use of these methods and less tendency to seek new or further develop more complex, costlier, and mere time-consuming techniques. Thi rdly, despite the relatively large amount of activity and writings devoted to these techniques, I ittle if no objective evaluation or assessment has been made of these techniques. Finally, the structure of the assignment model, with its clearly defined objective function provides the means for such an evaluation. This is not to say, however, that other approaches or methods cannot be evaluated. However, many of the other methods, some of which rely only on relationship of element to site of available space, e.g., the overlay techniques, and do not necessari Iy possess a set of interelemental relationship, could not be "scored" in a simi lar method and might necessitate a greater reliance upon subjective evaluation.
It should be noted that the general area of assignment technique comprises a wide range of methods. The generic grouping is often assigned to any approach that bears some resemblance to the model description of Brotchie(7) or possesses one or more of the attributes or characteristics of that model. It is necessary therefore to clearly define and classify the different methods within a more detailed framework.
Assignment Technigues Within the broad classification of assignment techniques, one may first divide al I approaches into two distinct classes: 1) constructive or generative procedures and 2) improvement procedures. The constructive procedures begin with an empty field and locate each element of the plan successively in accordance with some given set of rules or algorithm. The improvement procedures take an initial configuration and attempt to modi fy it so as to produce a better or improved configuration. Whi Ie this classification provides some means of categorizing the various techniques, a further breakdown is possible by consideration of the algorithms used to improve or generate the plans. These algorithms wi I I be considered in the context of each of the two classes.
A. Constructive or Generative Procedures. As noted above, the constructive procedures are typified by an "ex nihi lolt approach to the space-planning problem.
8. SPACE PLANNING TECHNIQUES / 417
That is, the technique begins with an empty field (tttabuia rasa tt ) and locates the elements in accordance with some algorithm. The technique for choosing which element should "enter" the plan and for determining its location provides the ~eans for classification.
1. Random Generation Method. The simplest and most obvious method for generation or construction of floor plans is by random choice of elements and/or locations. The technique employed is a simple one: using a random number generator, successively generate a pair of X- and Y-coordinates for each element on the I ist of spaces. These coordinates wi I I determine the location of that element on the plan. To prevent an element from being placed in a location already occupied by a previously placed element, a check is made for occupancy. If the space is not vacant, a new set of coordinates are generated. The method may be continued indefinitely with a scoring algorithm used to determine which solutions should be "saved" or printed if one wishes to avoid seeing every solution.
2. Ordered Scores (Assignment Method). This method, the simplest and least sophisticated use of the affinity interaction matrix, bui Ids the plan by choosing the elements in accordance with an ordered list based on total interaction scores. The element with the highest score enters the plan first followed by the next highest scoring element and so forth. The positions of incoming elements are tested for best score within a given radius or distance from previously placed elements. This approach is essentially that of Whitehead and Elders(8) and is essentially that used by Lee and Moore in CORELAP(9l although the latter method does not adhere strictly to the ordered interaction sco res in certa incases.
3. Polyomino Assembly (Assignment One). This method is based on the polymino assembly procedure described by Mitchell and Di Ilon( 10). The choice of elements to enter a plan is made on the basis of interaction with elements already placed and the location on the basis of adjacency to the placed elements. In particular the choice and location of the n + lth chosen element is based upon interaction with the nth chosen element of the plan. The method may be modified somewhat by the fol lowing options:
a. Positioned Elements. Choice of element is based on interaction with all elements already placed on the plan and theelement with highest interaction score individually to the most of the placed elements is chosen for entry .
b. Number of Dependent Elements. Positioning of an element chosen by the previous option may be restricted to only locations around the n elements with which it had the greatest interaction.
c. Interacted Elements. Choice of element to be placed is again chosen on the basis of interaction with positioned elements. The one with the highest score to the most elements is next to enter the plan. Location, however, is only possible next to those elements of the plan with which the incoming element had highest interaction scores.
418 I ENVIRONMENTAL DESIGN RESEARCH, VOL. 1
4. Nuclear Growth (Assignment Two). This method is a new approach to the problem of space-planning. Selection of an incoming element is based upon the scores of the avai lable elements to the cluster of elements previously positioned. That is, if three elements have been placed, the choice of a fourth element is made on the basis of the element having the highest total score to al I three of these elements. Position is tested at al I points adjacent to these elements. The method differs from the original assignment technique in that this method chooses on the basis of only interaction with positioned elements rather than from a list ordered by total scores. It also differs from the polyomino approach by us.ing total interaction with all positioned elements rather than only with the last element(s). The method may be modi-f i ed by a I low i ng for:
a. Number of Dependent Elements. Rather than interaction with ~ previously located elements, choice of element may be restricted to only the last n elements to have entered the plan.
B. Improvement Procedures. As noted earlier, the improvement procedures are those which systematically seek to improve upon the score of the plan constructed in the previous cycle. Elements are re-positioned in an effort to achieve a better score. In general, efforts that fai I are disregarded or discarded and computation ceases when no further improvement is possible. Classification is made by the technique used for obtaining improvement.
I. Random Switch. This method takes the initial plan and seeks improvement by randomly switching any two elements of the plan matrix. To avoid switching empty space elements or a non-empty space with an empty space, the restriction is included that only if two non-empty spaces are within a given radius of the empty space wi I I a switch be permitted. This rule also prevents a plan with "detached" spaces and thereby maintains contiguity of plan.
2. Ordered Scores and Alternative Check. This method uti! izes the same technique as the first generative technique (Ordered Scores - Assignment). At the end of the plan generation phase, however, a systematic switch of every occupied element with every other occupied element of the space is made in an effort at improvement. A more sophisticated approach to this method uses the option:
a. Alternative Check. This option performs a systematic switch of plan elements seeking improvement at each cycle of the plan generation, i.e., as each new element enters the plan. switches are performed seeking overall plan improvement.
3. Single Switch. This method systematically switches every element of the initial plan with every other element of the plan. Again, to avoid non-contiguity, the rules prescribed for the random switch are invoked. The method also permits K passes through the plan, where a pass is defined as every position switched with every other position (a maximum of n2 switches for a nonempty space).
8. SPACE PLANNING TECHNIQUES / 419
4. Computerized Relative AI location of Faci I ities Technique (CRAFT). This method has been thoroughly documented( 1 I) and several extensions proposed( 12)31 Basical Iy, element~ are interchanged to achieve improvement on the basis of meeting at least one of three criteria: I) they are the same size, 2) they have a common border, and/or 3) they border on a third element. At each cycle the interchange performed according to these rules is that producing the greatest improvement in score. The procedure ceases when no further improvement is possible.
~ere are, therefore, eight different assignment space-planning methods which can be ':"Odified by invoking the several options. In addition, all the generative methods ~ay include the options:
i. Value Only. This option calculates interaction scores on the basis of relational value X distance, as opposed to:
i i. Value-Area. This option calculates interaction scores on the basis of relational value X distance. This option is useful when elements are of vari ed size an d importance. is des i red for large r p I an elements so that they would enter the plan initially.
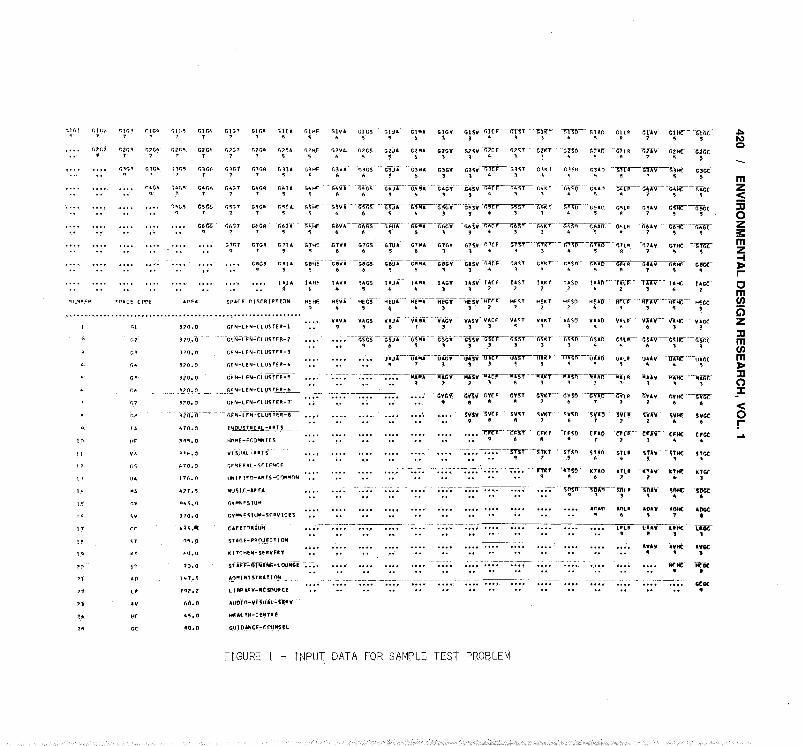
Evaluation of the Space-Planning Methods lhe various methods and options for space-planning described above were evaluated using as a test problem, a middle school (junior high school). The data for the school including room types, areas, and relationship matrix are shown in Fig. I. The choice of this building type and its associated program for testing allows for many clearly defined functions and relationships. The number of spaces (twenty-five) permits the possibi lity of sufficient variation in the final plan configurations and scores which would not be possible with less complex bui Iding types or those with a smaller number of spaces.
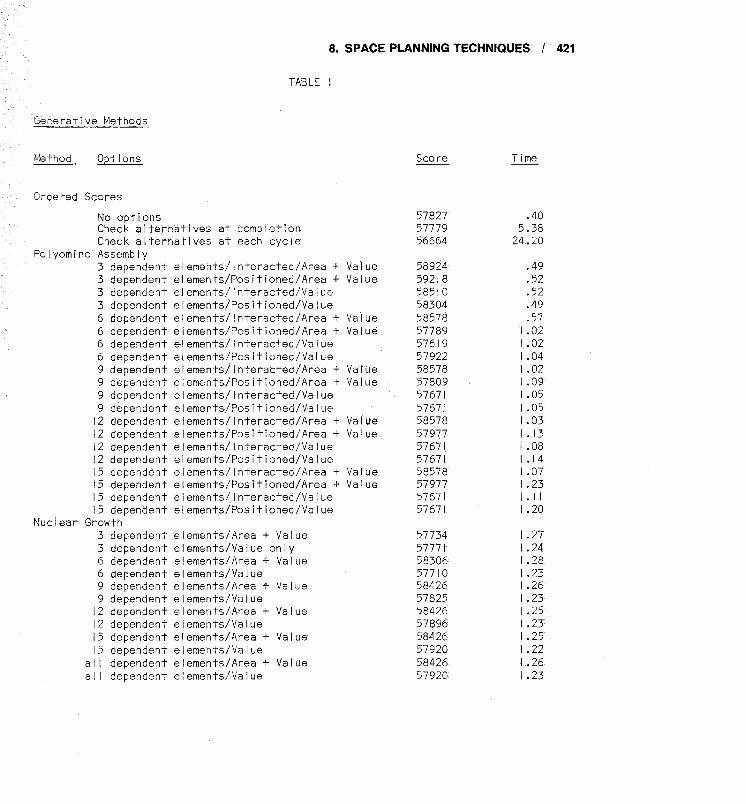
Using the information given and a set of computer programs developed for each of the methods described above, test runs were performed to assess and evaluate each method. Since scoring was possible on the basis of value X distance in al I cases, comparitive scores were obtained. In addition, computer times were obtained for each run to assess speed and cost as well. The scores and computer times for each method and option used are given in Table I.
With a major objective of any space-planning technique being the achievement of the best possible results without generating excessive costs, it is interesting to note that the variation between the final scores of the various methods' is less than 5%. More importantly, the time differential between the worst and best solution is more than forty-fold! This means that for a sacrifice of only 5% in the efficiency of plan, a savings of nearly 20 minutes of computer time (23.2 minutes versus .52 min-utes) is achieved. Interestingly enough, a solution only 2% "worse" than the "best" solution can be achieved in 1.02 minutes.
It is surprising to find even with a relatively "smal I" buildfng, that the solutions generated by the various methods generate so great a variety of solutions. 'While certain options of each method fai I to produce much, if any,change a wide range of
<;1r.1 I'; 1 r..'
"lU"''''!'P
10
11
17
1\
14
" t1
I'
" '0 '1
" " ,. ,.
I';,u.,. . r: 11'; ~ rtCit ";l{j'i GIG'"
1 GIG7 GIGI\ ;'11 A GIHF GIV' GIGS, r.W' GIN" GIGY GUY mrr--?'Hr (;"ll(T r,T"Sl'I- r.T~-Gfrf)' ~lV--'(a...c-- Giee
1 T 1 l' 'I' '5 'i 6 6 '5 6 3 '\ 4 , , 4 'i g 'I' or; 5
r;lfi' (';7(,,. r.2r.or; G1G" 1
G1G7 r.2GI\ r.2fA G2HF G2VA GlGS G2L1" G~JIIIA G1GY G2SV '~-GBT ~lKT ·G2"~1'l (;"n -GhA 1;2,I:y --C~Ht- GlGe: 1 1 1 7 1 5 '5 b ~ or; b 3 '3 It , , .. 0; II 'I' '5 '5
fi'fi' r,'Git • 1
r:ltGit ,
c::paCf Cf'f'f
"1
0' '" "4 '" ,,1
" v, ,.S
'"
"y 'v rF
"
'" AO
" .v He
oc
r;,r.'i r.lG~ T 1
G'G1 r,'Ga Gll" G'HF G3VA G1GS G"JA G3"'A G3GY G3SV ~~'--G~I<.r-'Gnfi r.~TO-'-·GITA-G3AV-'-G·)~GlGC 1'1' '5'; 6656] 3433" 0; a 'I' '5 '5
";4r,or; Goftr,,, , 1
G4r.1 G4G~ r.ltU G4HF - GIoV'- G~:GS G4J' ---~NA G4ri"- G4SV -r.4l'"r~ G4f(f--G4~O e-It{j) -Gi.'[R--G4.lV --G4i<-- r.4GC 1 l' '5 '566 '5 ~ 3341'\ 4!i" 'I' '5 5
~i;G'i CSGb r.!ir.7 G')GIII r."J, r.~HF -G'5VI G5GS -G~JA - G'5I111' -- GOSGY G'SSV r.ijCF G'5Sf G,)Kr-~-G~Ti.J'--Gqjf---lr~'V-~'5Hi:-G5GC 1'1'5 '5 66'S ~ 33 4 ., '\ 4 '58'1' '5 '5
G6G6 G6Gl Gf,GFt G611 f.f.HF G6V' --C6GS- -t;6jji-- G61111' -- G6GY G6SV ~~"-' - -GliKr G";t;S~i1r --'C-,qlf-' '~G6HC G-6C(-l' 'I' OJ OJ 66 os 633'" 3 3 4., ~ 1 '5 Ii
G7r.'I' G1G" (;1" G-7HE tT"lA G7GS-TIiJA-~"'i G'I'GY Gfsv·?':1C"""F--~'Rl'- ·t';"1j(T--G-',"o -G"'flD- "-~ ~lII-GfHe- cfG(-q'l' '5" 6 6 '563343), 4 '5 !'I 1 15 os
GIIIG'" r,'lijj-- G8H~ - -GliV'. --ClfGS ~ Gi"iiA'-G~- G8GY- - GBSV -r,erT"------cS-rr----Gffi(.,... -~{n- i"-;-'UD GAUl GSAV GfllHI" GI!GC q '5 '566'56' 341 OJ 7'5 '5
Id, r"j"if -tAyT -~fAGS "-iAJA"-T~-II;G-y- JiSY TTr'- nn flif'f fA~D fU!) fATp-'IU-v-·--rr-~·-UGC-
q 64'S 6 '" 3 32??"1" 2 .. 6 1
AtI~A ~PACf DISCRIPTlJN HEHE HEV' HEG5 HEU' HEiiI.-- HEGY --HE"sV"Ht'n' HnT Htl(f HF-51') H~A[) flr-i)f j:{fiY-----HFHt-" -~. q 4'56'" 3 32?"1"l,., 3 'i.,
VAVA V.aS VALIA VUiA - VAG" - - YASV V"JCr- V"~T VAKT V'~O V'Un- - VAlP vlAY'- v~f«: VIGC 3<'0.0 GfN-l fN-Cl U~ TE R-} OJ 'i 6 1 3 3 3 3'"'' 6 , 3
310.0 G"N~U: ... -ci-uSTER:'""i - GSGS -- GST" G~)i.. t;-SGY" -GSsy~r.-~-'-G"sKt ~D ----C·~.f!)- - r.~l·r-~Av'--G!~ --GSG("
PO.o G!'!"-~F.N-.(qljJ:~~:-_J_
'10.0 G"'''I-lEN-CLUSTER-'''
320.0 GF,\i:'LEN:'ciuSTEP~-
~(}.o_ r.1~~~t;!J!~T~:~_
J?O.O GFN-LFN-CLUHER-l
-J?O.O--- GEij:'lF;;j~ciu~~
~19.0_ __ ... I-m!l.5.J_lliJ.=.lli.L--_
,~o;. 0 HnME-fCO"tNICS
~"lI1'o .0
410.0
11'~.O
4"]7.'5
Clio'). 0
310.0
~,j~ ••
'l~.0
1'00.0
';10.0
llo'l'.'i
1Q7.2
60.0
4'5.0
1110.0
VI SU'l-UTS--
r,~"IEP o\l-~t: IfNf:E
UN I F IFO-AP TS-C !,)NI4(lN
... u~I(-"'R:E'"
GV"'NFS 10/111
GVM,.." c; IUM- Sf-V ICES
C,FFT"RfIJ"t
~TAGE- PPOJ~C T 1 ON
KfT("Hellf-Sf"RVFIIY
S'T IF'F;;'ofN"fiiG--;;:[aiNCE
An~I_~J S_T.!t_~!!.ON"
II BIl ARY-IIlE$OUAC£
,UOfo-yj SUAl-U.Y
HriAl TH-ce""'IlE
GUID'Nce .. COUN$U
OJ 6 15] ]3 33., 4 ... 6, 3
--(fiLli----U'"" UAGY U,'SY aln UiST !JAit ~n-ull"lf" ~U(lT------unv-- UA.-.c,_uUAGC OJ 'I' 333., 3 'i or; 'i oft 4 '5
------.-- - jIi."'-~iiiGy--"lS~"lfI"ST--IifIi(T·-~--~Uo-~lTlr- -l{u'y- ~"-HC --"'AGi: 9 2 2 3 6 3 1 3 , ), 11 11
GYGY '-GYSV Gva GYST Gyltl"--' ~--"r.vA[)--mJ-'-r.vi""V'-7.YH{"- -G"Ya-" ~ II!! III 1 6 1'? 166
fv$v ~'~~,-" -S:v"I{T SV~ SYI"O ""$'1['- ~.ry SvHe SYGC ~~ 8767? 2 6 6
•••• ~-"~"r-cnT""-,;-n-n nAl) ··n, ... e~jv-· CJlW; c,Gt IJ 6 8 ~ 'I' 2., 4 4
•••• -~-.~-;-- -!T$T- -Sfl(f sfSn SUt) STlII. ~l'Iy nHC ST~
OJ 'I' '5 " 10 , " ),
KTKT -150 I(T"Al) I(fLit nAV Itfl«: !(fet q (II 6 2 1 ,. .,
:;;-'-~7.--:;-----;;;-;-~s"1f -~Irr--'m' ---SOl',," -~~ Sllr.e 6 CI l' , , ,.
""'" '''lll "OAV lOtte "OG( " '5 1 •
ljilR'-lii-V--'l:iHC·~iGt-
9 " , .,
AYAY
• IVHt ,vic , , ""Me HfOt • •
-Glee •
F[GURE I - tNPUT DATA FOR SAMPLE TEST PROBLEM
~ o
m z < ii o z 3l: m z ~ r-C m en 5 z :II m en m ~ :II (")
~::I:
< o r ....
8. SPACE PLANNING TECHNIQUES I 421
TABLE
Generative Methods
"~ethod _ Options Score Time
Qrdered Scores
No options 57827 .40 Check alternatives at completion 57779 5.38 Check alternatives at each cycle 56664 24.20
Pol yomino Assembly 3 dependent elements/Interacted/Area + Value 58924 .49 3 dependent elements/Positioned/Area + Va lue 59218 .52 3 dependent elements/Interacted/Value 58510 .52 3 dependent elements/Positioned/Value 58304 .49 6 dependent elements/Interacted/Area + Value 58578 .57 6 dependent elements/Positioned/Area + Val ue 57789 1.02 6 dependent e-I ements/ Interacted IVa I ue 57619 1.02 6 dependent elements/Positioned/Value 57922 1.04 9 dependent elements/Interacted/Area + Val ue 58578 1.02 9 dependent elements/Positioned/Area + Val ue 57809 1.09 9 dependent elements/Interacted/Value 57671 1.05 9 dependent elements/Positioned/Value 57671 1.05
12 dependent elements/Interacted/Area + Value 58578 1.03 12 dependent elements/Positioned/Area + Value 5797.7 1.13 12 dependent elements/Interacted/Value 57671 1.08 12 dependent elements/Positioned/Value 57671 1.14 15 dependent elements/Interacted/Area + Val ue 58578 1.07 15 dependent elements/Positioned/Area + Value 57977 1.23 15 dependent elements/Interacted/Value 57671 I . II 15 dependent elements/Positioned/Value 57671 1.20
Nuclear Growth 3 dependent elements/Area + Value 57734 .27 3 dependent elements/Value only 57771 .24 6 dependent elements/Area + Value 58306 .28 6 dependent elements/Value 57710 .23 9 dependent elements/Area + Value 58426 .26 9 dependent elements/Value 57825 .23
12 dependent elements/Area + Value 58426 .25 12 dependent elements/Value 57896 .23 15 dependent elements/Area + Value 58426 .25 15 dependent elements/Value 57920 .22
all dependent elements/Area + Va I ue 58426 .26 a II dependent elements/Value 57920 .23
422 I ENVIRONMENTAL DESIGN RESEARCH, VOL. 1
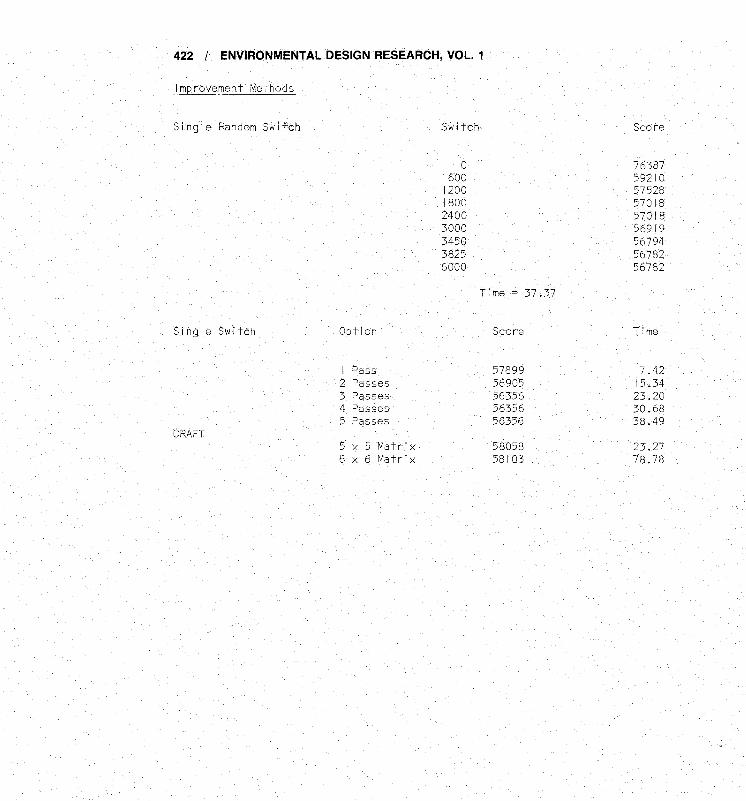
Improvement Methods
Single Random Switch
Single Switch
CRAFT
Option
Pass 2 Passes 3 Passes 4 Passes 5 Passes
5 x 5 Matrix 6 x 6 Matrix
Switch
o 600
1200 1800 2400 3000 3450 3825 6000
Time
Score
57899 56905 56356 56356 56356
58058 58103
37.37
Score
76387 59210 57528 57018 57018 56919 56794 56782 56782
Time
7.42 15.34 23.20 30.68 38.49
23.27 78.78
8. SPACE PLANNING TECHNIQUES / 423
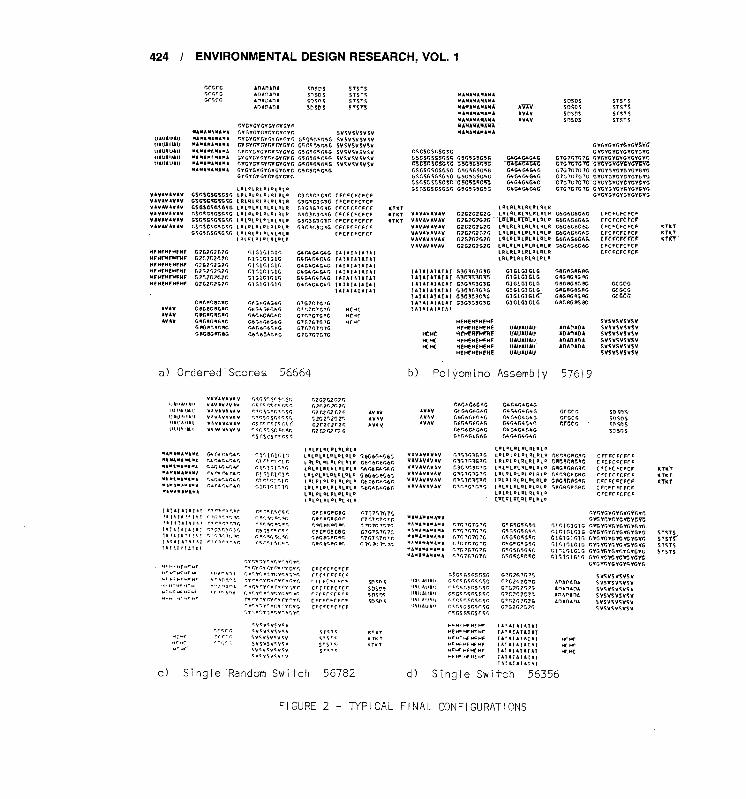
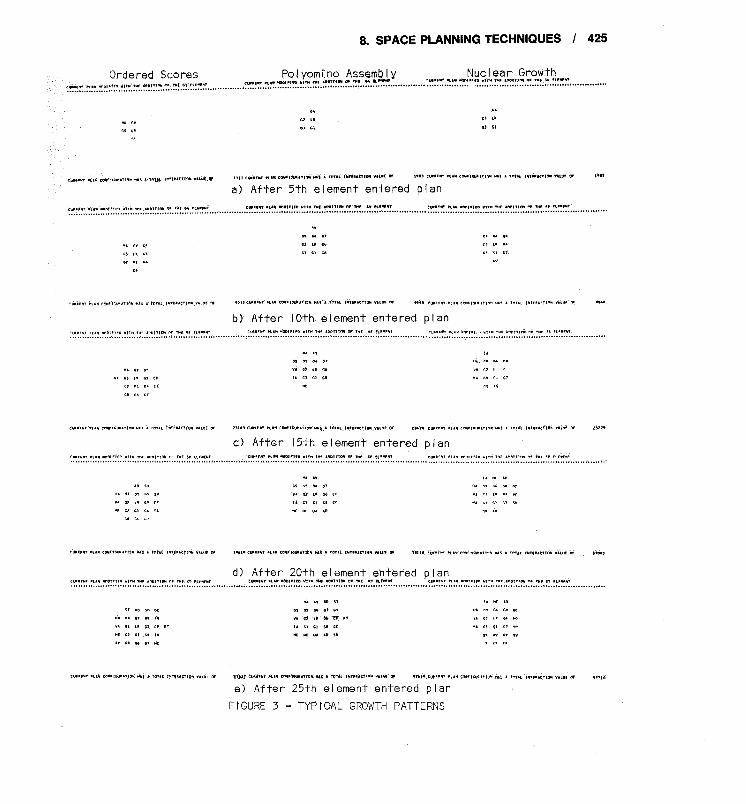
::::ifferent configurations are possible. If one carefully inspects the final solu~ions shown in Fig. 2, it is clear that a wide number of alternatives have been 0;)tained using these different apprcaches. Methods such as the random generating routine produce a great number of plans, of course, but not many are optimal. The core sophisticated generative techniques do, however, differ in their final product. It can be seen in Fig. 3 that the growth patterns resulting from the different 30proaches vary sufficiently to produce these variations, but the scores tend to 1 dicate that near optimality has been achieved.
Concl us ions Ii is probably difficult to denote anyone of the many space-planning methods as "best". Nearly all of the methods that have been evaluated here have certain at-7ribute that make them valuable. Even the random generating or random switching routines, both of which are seemingly based on an "unscientific" approach, are valuable to the designer in producing alternatives not foreseeable by a strictly rigorous, rational approach. Clearly, however, if certain methods do little to imGrove upon a final configuration, but are much more time consuming, there is some doubt as to their values and consideration should be given the more efficient app roaches.
On a rational, phi losophical basis, one may prefer certain methods of space-planning because the technique more closely approaches the actual design process. The second and third assignment techniques (Polyomino Assembly and Nuclear Growth) are the most sophisticated methods and come closest, in this regard, to a designers process. Oesp i te the fact th at scores were not as "good" as that produced by the sw itch in g routines, these two techniques have a rational appeal and appear to justify one's faith in the approaches taken by the speed with which they achieve solutions. Clearly, a direct route to solution is more satisfying than a trial-and-error sol uti on.
It should be noted that the improvement techniques, particularly CRAFT, are valuable to any designer by demonstrating alternatives to the initial plan. This is particularly valuable when the initial configuration is one that has been carefully developed rather than arbitrary as in this paper. Unfortunately, however, since the lower bound on the score for a plan is unknown, these methods may perform thousands of needless operations and tests, producing no real improvements. This is the greatest disadvantage to these methods along with the associated lengthy computation times.
For the designer, the implications of these results are three-fold. Fir~t, methods exist and can be further refined that can produce good and efficient architectural plans. The adjacency of related elements into well-defined clusters seems to indicate that these methods not only provide efficient plans, but also that these plans are quite simi lar to those traditional design methods achieved. Secondly, the abi lity for certain space-planning techniques to quickly generate numerous efficient alternative solutions to a given prcgram and set of criteria provides the possibi I ity for a richer variety of architectural solutions avai lable for investigation than would be possible by manual methods. Finally, and most importantly, the results of this evaluation indicate that many of the different space-planning techniques produce solutions that are al I as nearly efficient despite fundamental
424 ENVIRONMENTAL DESIGN RESEARCH, VOL. 1
U.lUIUIU 1"U&U.l.U UIUIUiU t/IUI"AlI II.UIUIU
\llYIVAVa" YIVlVlVly v.yayaVly yaWAY'Yly vay,YIYI ... ... ay,YIVIY
.. fMFHfHFHF HFHrMrMn4'F HFH'HfHFHf H'"fHEHfHf Mf"'fHfwf:M'F HFHFHFHFHr
.Y'V AVAV AYAY
,ru.nl"a 'in~D'i ST'iiS STST<; ST5l5 ~TSTS
snsos arlA.DAnl SOS"S II)I£liOI SI'IS[\S
r,veVGVGycvr.Yevr, ....... ~.,.... ;''fGYG'fr;yr,VGvr.V(; SV'iYSvSVSV .".1111 •• ''', r.YGYGVGvr;'I'Gvr,vr, cIi;GIljG"'r;')G SVSVC;V5Vo;V W".'.'"IIIII r;VGvr,vr,yr,yCYGVG G~r:-;r;'5r,'iG SYSVSVSV'iV ......... ,"" (.VC,VGYGyr.,Y(';yGVG G')G-;r.-;r.~G SVo;VSYsvSV ..... .l.~ .. u .. , C""GYGV(;vr.'fCYGYG CIlj(;5r.";''5G SVSvSvSvSv .,-,111,".111' r,YGYGyr;yr;yGYGVG (;1tC1l;GI5G'5G SVSVSY5VSV ., ............. , GYGYGYGYGYGYGYG G')(;'j(;"-C-;C
GYGYGYGYC"CVGv(.
llflOUllltllllllllt Gsr.SGSGSGSr, llilllllllllllllRl" GSG~GWSG'iG lAlAllHlfllllAlJl GSGSC<;CSC"iG lltllllltlllLlIlltUI Gsr."iG"iGsr;<;G lRllllltlRlAt Itl" r.sr.SG~GSG~r, llfllfllflll'lOllflll r.sr,SCq;OIiG~G lOllillfllfllfllfllf: G"Gsr.SG~C~r. llfllllltlllL~llflll
llll l1 l lt lOtll"lC'
G?C1r.2r.?G r,Jr.1G\r.)r. Glt:7r.lr.,1; Gl1;1Glr;lG r.2G1".2G1r. r;1r;lGIGIr. r.1r.1".1(;2G r.lr;lr.lr.lG G2r:ZG1GlG ';IG1(;II;IG G2(.2(".lr.1r. r.lr.IGlr.lr;
r,.1IIr..r;~H:'illr. r.f.r,I>CbG6G G,(.er •• (,.r, r.t.r,f.Gf.r.,.c laGillr,iIIC·G f"."GbC"'CfoG Clllr.fllr,"CII('; Gf!.r.I>r.,.,r.~G Cf'GJlf".illr.-.r. f.,.r.br.br.,.,C G~C8r.Jlf.8G Gb"6Cl.r,foC
G)r.'G'G'\G (FrI:CF(HF GJG"G3G~G nCFUCF'CF" G'G'G'r."c (F"CFCF"(FrF" G'C3r.)"'G (FCFCHF'CF Clr.)C)r;"H'; rFCF'CI:CF'CF' G1G'(;)';'G CFCfCF(Fr~
(FCHFCfCF"
G4r.4G4G4G UIAtlUTU G~G~r.~G4G JAT'JAllUT G4G4G4G4C 1&1A1&"''''1 G4C4r,.G"r. TAU.II.TAUt G4G4G4r.4G UI.lT!.UTAT r. .. r.4G4C"r,. f&UI&UUI
IlI.T.IAIA,
C7C1(';7r.7G GH;1Gl('j7G HCt-IC C7r.1GTr.1G H(Hr GH.l'Gl'Gl'G Hrt-l( G7G7r.l'r;7C G1GTG1Gl'G
a) Ordered Scores 56664
"'A.."ya..,~ V 1)'''&'I4;n v Ii.., A ... ~V A.., 1151lAliAV va.., • ..,iy,.., \!s,uAqa', "'8va..,~vav "\\IAtiAl v"..,a..,ava.., ",'JA'JI.I" ..,~ VA ..,~ vt..,
r; Sf. 'ir. ~r. ~t. ~r; ro; r!\ r:o; r~ r.O:: r: f"c:r:S",o;r,o::r.lI';r; ";(~'ir.~r,~~St;
r;!,r;O::f""ro;r;"r: rotr,o;r;y;ot;."r; r;!tr.scS;!r;s~
r;2G2GZr.?r. (;11'.11': 7f. 7r. r,'?r:lr.]r.]r '>ZGZr:'I3Zf". 00(20(; r.zr.2;,..,r7G
IlilPlallilillRlR
AV'Y 'VW A..,lV
I(TKT I(TKT I(TI(T
.. '·A· ... 'IoIA (;4; ... r ........ r. "lqr.lq,,; lIL"L"L"LlIl"LII- f",6(i6r. ... r.6G "A ""-A 111''''1 r.4r; .. r. .. ~,r, .. "·' ..... A .. a I'"tor.U;4r,tor. • .... a ........... r"f"&r4r-4r: ..... S,"" .. " .. A r: .. r ...... 4r. .. r.
r..,r4r;4r.4r; ·A .. II"' ..... ·A
T A lAl a TAt .. ! ... , .... I"~ -; .. r. 1!1~lt·~'~., "~r.'r:"'.v. U,' l&!\'~' f"'''''-~,r;''r. III Al & IAI a ~ <";~ r.:,r;:! G 3 r; T5"!a""! ".'''.v.'cv. ,\,t,.Io' U~I r'''''-f''''r.'r: 1ftf\1f! "'T! 1
~r·,. ... \ J'
","I' .. r .. r ,.~ r;~ ";
";1 r:1 rl rt r: r:l r.t";I":';. r.! 1';1 r,1~1r; r;ll':'r:.;r;tr: (,tr,l~lr: I":
icr:"r,~('~r. r. cr. "ir; o;r. o:.r. f"."f"'V;cr;.cr. r.~ r;5rcfc~
r,Cr.'V.o;r:Ct': '''if''''i(:'!>r,,,r.
r:vr:'I'':V'''.'I'r.v''.vr:'tr; """r..,r,yr,Yf":f""YC'tt;, "."r:"".'t";Yf'."<";'t,,;.,r. ":"",,".yr.yr.vf"vr:vr. ryr;"f"yry;.,f"",;vr r. "". "f". ,,~. vr. yr. 't",:"r; iVry~'tryry;y"'..,r,
f"" .... v":y,.yr.vr·"r:yG ".v r. v"'. y";y"' • ., .... ,,"; 'tf".
c \I~ y'S v~..,ot V ~..,ot\lo;VS\I"'"
o; ... o;v'>Vo;VC;..,
S"'~"'SY"yC;lI "..,0;..,,,..,0;'10;.., c ... (VC;vo; ... ~v
Litl Pl III III III 1I1R lAlIIlAllilltAlR LIlt. P l"t. II LAlolO llflPtOlOllll"lll tOlltlOlOlALRl_ lOlOlJIIlFlolllLo llilolalolollllO
Cl'G'!'G·Gt'G f.e"er:illlr.!l1" '" ... r,fI(;ct1:.111'; (H"GH8G r; p.r;",r;~r._r. r;-r:.ai.-r.w:
C~(F'UCFU' (r(trf'(I:(t rrrF-(l:rtff U(~(FU{F' rrrr(rrJrl: (r:fr:rr:rF-rr: crCJ'(r:(J'(F
STotTS 'o;TSTC: ST'STS O;TeT'!:
c) Single Random Switch 56782
G6r;6r.~;,6r.
,.J.r.6rJo.r .... r; G6G6C~bfj r,t.Cie,r.:,.r:6r. 1';6,..(l..r .... r.6;,
r.7t;1".1r.1G (:7G7r:U:7(: f"."'r.lr.7r,7r. G7G7G1G7G r;lr.lr;l'r;'?r: r.l(';lr.1f".7f'.
Sf'l""0Ii SOS~'5 SOSn<; SOSt'S
lilT 111'1' IIITO<T o<TIIIT
~A"'A"'A"'AfltA "'AIIIA"'A"4AIIIA
-liflliJjll"""jliillJif.l ""A~AIII"".l." .... ~A"'AIIIAIIIIA ".lJfI.lifANll{l '''llfltA'''A''A'''A
(;Sr.SGSGSG'SG GSCSGSGSGSG r,5G5G5GSr. r.-~C!C~CSC~ r.-sc~ CSCSCSCSGSC G'5G'5(;SGIljG GSGSGSG'>G'.iG G5G5C5G5C GSGSC~C~G~r.-~~~~ Gsr.SCSGsr,SG G5GSG%5G
AYAY AYAY AYAY
G4G4G4G4G -~C"4""C4C~C
G4G4G4G4G G4G4G4G4C b4G'~4C
G4C4G4G4G
lllllllllllllllllllll
SDSOS SMOS S(lS!'lS SOSOS
STSTS ~ST~ snT'; STSTS
CYGYGYGYCy~yt;YG G YGYGYGYGYCYGYG
C1G1G1Gl'G r;YGYGYGYGYGYGYC 'C1CTI>1C1'C CYCY~CYbY'C G7G7Gl'G7G GYGYGYGYGYGYGYG G7Gl'G1G7G GYGYGYGYGYGYGVG
-r,?G"-G 'C~-- C-vc,-Y"bYGYb VGYG YG Gl'G7G1G1G GVCYCVGYGYCVGYG
GYCYGVGYGYGVCVC
YAYAVAVAY G2G2G2G2G llllClUI;LRllllRIR G6Gt.G6G6G CFCFCFCFCF yAI/AyAIIAy C1C"1C:i'C"2-C lHllLQUlUtil ei C6GhC6GbG- CFC"FC~cr:CF' VAVA..,AYAV GZC2G2GlG Ul'LIlLRlRlClltllR G6GbGbGM'. (FCI:CFCFCF V."VAVAVAV G2Glr.2G7G lPllllRlRlCllRlR G6GflGI>G"G CFCFCFCFCf-VAVAVAVAV GZG2G2G2C lQlRLlllRlRllfltl G6C6G6G6G Cf!CFCFCF'C~ VAVAYA..,AV GZGZG2G2G lRl_ltllCllAlllLR G6GI>G6G6G CFCFCFCFCF
LRlRlRLlIlRlRlII U("FCFCFCF lll.l.lRtRU'lCllP
rA'.IAIA,.r G3G3G3G3G GIGIGICIC G8G-flG8GRG IA 1A fA fA JA r C"3C"Jr."3C,-c GlCIGIGIG G"t;~I\GIlG TAlAtAU(AJ G~G'r.3G)G GlGIGIGIG G8G8G6G~ GCGCG IATlUfAUI G3G3G3G1G GIGIGIGIG GP:C~G8GI'IG GCGCC tAUUUUI C""JC~YC'C "CIC"IG1Clf. G8G!fIGIi\r;AC octO, tATATAUUI G3G1G3G3C GIGIGIGIG G8G8G8C8G tAtAtAUIAI
Hf'HEHFHEHf SVSVSVSVSV HFHfHEHfHE UAUAUAu AnAOAO. SY').VSV'iVSV
"'He Ho-t£HFH~T UlUIOlO AD'OJ.O' S-V!ySVJv~v
HeH( ~FHEHEHFHE UAUAUAU .OADAIU SYSYSYSVSY HCH( HEHEHEHEHf UAUAUAU ADAnAOA SVSYSYSVSY
HE"'E''''~'''EH~ U1UAUAU svsvSVSVSY
b) Po I yomino Assembly 57619
r:"r.,.Cf.C.c,C G4r.4r;4G4(; AV.V r,t,r.o')r .... c ... G (;41;4r;"1";4G Grerro sosos A..,.V r.6G ... r.t>r. ... G G4r.4G4G4G GrGcr. snSDS AVAV r.~r."r;#or."r. G4I;4G4r,.4r. r.rc;.CG '::['Is05
r,fo~"G"G"'C (;4C"G4(,4G SDsns r.I>r.I>(';M."C r,4r.4G4G4G
lOlRlOl"lRlClllt V!yAYAV1V r.·H;'V;'G'G LlIl"llllltlCllRlCl r;1'; r;I'IGFI GAl'; CFrF(FrF;F VAVAVAVIV r."r.~-r.'C'lr, lllllltDlIIll:lllILD t;"r.~r.Ai.I'lr. c ~C:~U'CI='U YAV"VAva.., G)G~r;~G'\r, lOLltlClllILAlPllI G"GIiIGAf.Sr. (rCFC~r.~CF YAyay • ..,lIy G'H~lr.3Glr, lOl ~ lPl Ol _lR l~ GRt;'Gf!GI'tr, ;I:(FC~CF(F VAVAyAVIV r:"~,r.,I>"r, llll/)lRlDlOlPlo GACAr.M'tG UCFC~CFCF yAVAVAVAV r.~r,"G";.":Ir, lOl_lPl_lollllll r;Ar,'!r;Il(;.'IG CFr:FrFrFrF
lRlCllOlClLIILOl" (F'(F(!"CFCF lVl~lll"llllll'l"ltl
"'1"AlIA"A_A r.yr,YGYGYGyr.vr,VG GYr.vr,yr,VGvr;vr.VC
..A ..... a .. A"'A r;l'r;7r.lr,7r, GC:G~Go;GIljr. r;1r;tf';lG1G r.vr,YGvr. yr.YG VGYC OU04A"'A·"'IIIA r.'?f",7;.7r,l'r; r.o;r.O;G'5G"ir; i.1r.lr.lGIG GVGYGyr.VGYGYGYG .. A" ' ... A .. !'" A r.7C1r.'1Gl'C MGIiC~C~r. (;lGIGIG1f' GYG Yf';VG YGYG VGyr; 04A"&"A·",,,,,, r.7Glr;7G'?G r."iGcCcGIlji,. r;1".traGIG r;vr; 'fr;yr; VG YG Vr,VG "'a "'A"a .. A'" A r,7r.l'G't;.'tr; CCi,.o;;r;'IGo;r; r;l":Ir;.IGIG Gvr,YGVGvr.VGVGVG "loIA"IA'04&IoI' r,"r.1r."c,'1r, t,~r.IiCt:(;'iG t;l~l~lr.lr. G vr, Y~ YC YCYC vto'iC
GVGyr,VGVGvr,VCYG
r.5G"r,'ir.!'r.Sr. C'!r.1r."r;',,; SVSYSvSVSV '15\1A"AII G(,f·o;('.(,r;sr;~G PGlGlG'G a"AflADA Svc:;vSV('v').V '1\[I&OAII rotr;c:;r;o;r;sr.c:;r. C"'G?G1r;?i,. 1"A"'OA SY(,vSVC:;VC:;v UI.UAUI,lt (.~GI; r;.::r:Sr.'iC r;"r.:,r;,,~,r. IIlAJ"IAI)A SVSV~VSVC;V "~IIIIIHIJ r.(r;o;r.~r;.::r.c:;;" C"r;2r;?r.lr. A()l.DAI')A SVSVSVSvc:;V '1~lIAUA" (".ot(".C:;GSr,('("·<;G C"Gzr.l<:>lo; ('YSVSVSV5V
r·~r.Sr.~GSr: .. f".
"'~,"" I-Ifl-lr '~F' 'AfA'".,,! ~rWl"I-jI:Wl"I-Ir: TAUUTAtAT 1-<1:1-<: Hfl-lFl-IF 1l!IUATAlal ... "" ,..1:"'f'I-IFI-IFI-IF' I "I AI A!" ~t He'" M~I-Ir'I-IFl-tr'"'F' tAT AI lUT" >«:1« "F,"",I-Ifl-lEI-II: TAlllAtAUt
la! AlAI &JI'd
d) Stngle Switch 56356
FIGURE 2 - TYPICAL FINAL CONFIGURATIONS
I(TI(T K.TI(T I(TkT
I(TI(T I(TI(T IClkf
STCITS srs-rs 5TSTS STSTS
8. SPACE PLANNING TECHNIQUES 425
a) After 5th element entered plan
b) After lOth element entered plan
c) After 15th element entered plan
d) After 20th element entered plan CUII.'_T n_"lI()Oturo WITH fMf .OIlUIOIoI!If' fII[ .T fLflll'M1" tu •• '''Y _ •• It _""HI,,, I/I' ...... ~ '''O'1"'pt "f''''1' $1 f" •• ""
5S ~ G4 51 G.,
VJ, 1);1 t; c.-U.t
e) After 25th element entered plan FIGURE 3 - TYPICAL GROWTH PATTERNS
426 I ENVIRONMENTAL DESIGN RESEARCH, VOL. 1
d i fferen ces in' app roach. Th is imp lies that the des i gner may choose any method wh i ch comes closest to his particular design approach and phi losophy and know that his solutions wi I I not suffer in comparison to any other approach.
This final point is most interesting if one looks at the process by which the methods construct the solutions. The elements entering a plan at any stage and their location are often different as a direct result of the problem criteria and the method used. Despite this fact, and independent of type of problem, the final configurations sti II more than adequately meet the rquirements and standards generally expected of a good architectural solution. The broad implications of this apparent independence of good design solution to individual method may wei I be the most important result of this evaluation and indicate the continued need for investigation of the entire process of design.
Notes
References
'Mitchell, William, "Notes on Approaches to Computer-Aided Space Planning", Proceedings of the Kentucky Workshop on Computer Applications to Environmental Design (ed. M. Kennedy), Lexington, Department of Architecture, University of Kentucky, 1971.
2Eastman, Charles, "Logical Methods of Bui Iding Design: A Synthesis and Review", Institute of Physical Planning Research Report No. 28, Carnegie-Mellon University, December 1971.
3Grason, John, "A Dual Linear Graph Representation for Space Filling Location Problems of the Floor Plan Type", in Emerging Methods in Envirnomental Design and Planning (ed. G. Moore), Massachusetts Institute of Technology Press, 1970.
4Grant, Donald,IICombining Proximity Criteria with Nature-of-Spot Criteria in Architectural and Urban Design Space Planning Problems Using a Computer-Aided Space Allocation Technique: A Proposed Technique and an Example of its Application", Proceedings of the Ninth Design Automation Workshop, Dallas, AssociatIon for Computing Machinery, 1972.
5Ward , W. S., D. P. Grant, and A. J. Chapman, "A PL/I Program for Computer-Aided Architectural and Planning Space Allocation", Proceedings of the Fifth Annual Urban Symposium of the Association for Computing Machinery, New York, Association for Computing Machinery, 1970.
6Johnson, Timothy, et ai, "IMAGE: An Interactive Graphics Based Computer System for Multi-Constrained Spatial Synthesis", Massachusetts Institute of Technology, Department of Architecture, 1971.
7Brotchie, John, "A General Space Planning Model", Management Science, volume 16, number 3, 1969.
8. SPACE PLANNING TECHNIQUES I 427
8Whitehead, B. and M. Z. Elders, HAn Approach to the Optimum Layout of Single-Story Buildings", Architects Journal, June 17,1964.
9Lee, R.B. and J. M. Moore, "CORELAP" Computerized Relationship Layout Planning", Journal of Industrial Engineering, volume 18, number 3, March 1967.
10Mitchell, William and Robert Dillon, "A Polyomino Assembly Procedure for Architectural Floor Planning", Proceedings of the Third Environmental Design Research Association Conference, University of California at Los Angeles, School of Architecture and Planning, January 1972.
I lArmour, G. C. and E. S. Buffa, "A Heuristic Algorithm and Simulation Approach to the Relative Allocation of Faci lities", Management Science, volume 9, number 2, January 1963.
12 Lew, Pau I an d Pete r Brown, "Eva I uat i on an d Mod if i cat i on of CRAFT fo r Arch i tectu ra I Methodology", in Emerging Methods in Envirnomental Design and Planning (ed. G. MJore), Massachusetts Institute of Technology Press, 1970.
13Rohn, Joachim, "The CRAFT Program: Improvements and Proposed Improvements", SIGSPAC Bulletin, volume 4, number 3, June 1970.





























