Embed Size (px)
Citation preview
Pergamon 0952-1976(95)00025-9
Engng Applic. Artif. lntell. Vol. 8, No. 4, pp. 449-460, 1995 Elsevier Science Ltd. Printed in Great Britain
Contributed Paper
An Expert-system-assisted Reliability Analysis of Electric Power Networks
ISTVAN MATIJEVICS Po|ytechnical Engineering College, Subotica, Serbia
LAIOS JOZSA J. J. Strossmayer University, Osijek, Croatia
(Received January 1993; in revised form December 1994)
This paper presents an implementation of expert systems in the reliability analysis of electric power networks. The reliability model uses the method of Markovian minimal cut sets, which allows the consideration of several stochastic dependencies concerning the state space, such as common-mode failures, limited repair capacities and outage postponabilities, and the simultaneous performance of maintenance and repair by the same team. On the other hand, approaching the reliability problem from the view-point of expert systems opens a wide range of possibilities for very complex treatment of reliability problems. This means not only the calculation of reliability indices, but fault-tree construction, performance of sensitivity analysis and finding the appropriate modifying actions.
Keywords: Expert systems, knowledge-bases, databases, inference engines, user interfaces, work- ing memory, data-driven strategy, pattern matching, reliability, electric power networks, Markovian minimal cut sets, fault-trees, stochastic dependencies.
I. INTRODUCTION
As is well-known, the reliability evaluation of electric power networks above a certain number of network components becomes rather cumbersome when using conventional methods like Markov processes, logical parallel and series structures, animal tie sets and mini- mal cut sets, especially when considering some stochas- tic dependencies between their outage events. 1 Furthermore, all these methods yield in many cases only numerical results, which are hard to interpret. In contrast, the application of expert systems in the relia- bility analysis of electric power networks offers more, generally using artificial intelligence, knowledge bases and databases, especially the combination of the Markovian state-space method and the minimal cut set method (Markovian minimal cut set) along with the fault tree method. That is, in dialogue with the user and on the basis of numerical values for reliability indices, the expert system provides advice and alternatives at the planning phase, as well as a means of improving reliability at the exploitation phase. 2'3 For reasons of
Correspondence should be sent to: Professor L. J6zsa, J. J. Strossmayer University, Department of Power Engineering, Istarska 3, 54000 Osijek, Croatia.
449
brevity, the implementation of expert systems within the reliability analysis will be presented here for solving only a part of the entire reliability problem in electric power networks, i.e. for fault-tree construction in order to obtain the minimal cuts.
2. EXPERT SYSTEMS
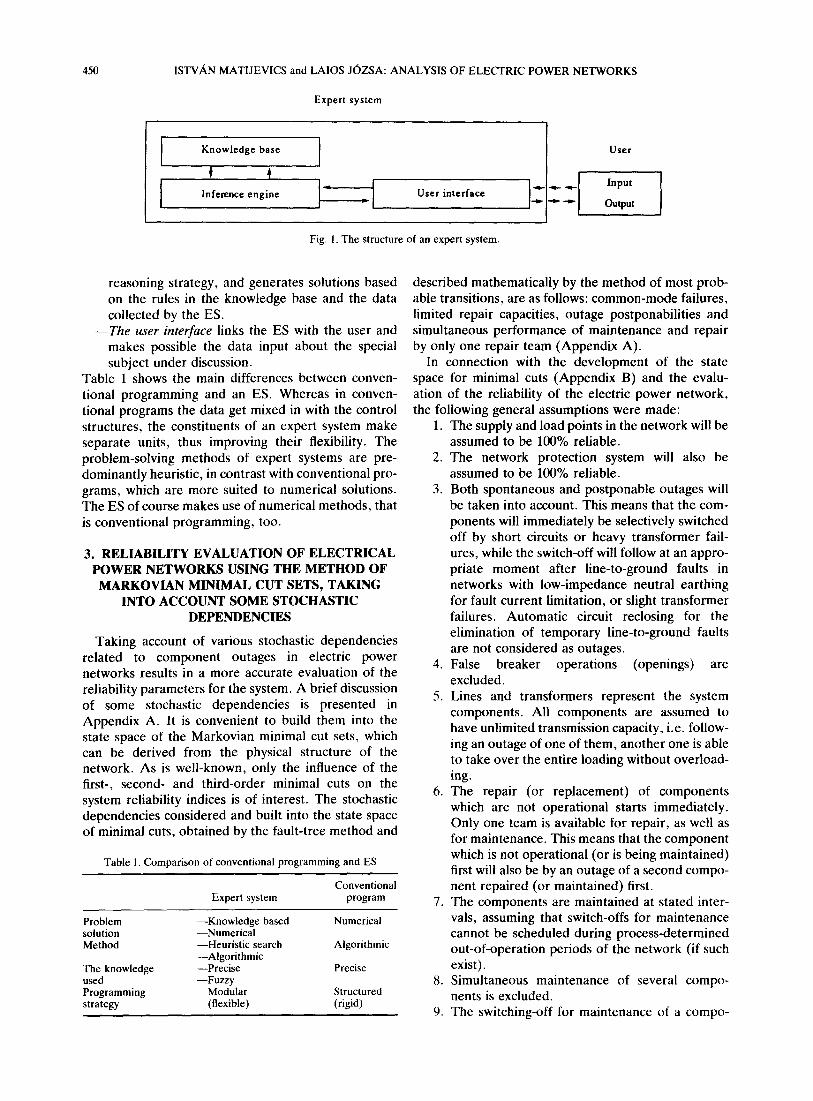
The quintessence of expert systems (ES) is briefly expressed by their name; they are computer-based application systems which provide an adequate expert service in bounded special fields, and solve complex tasks independently, or in close co-operation with the user. The feature of such systems is that they take into account the uncertainty of both the rules and the data. Their modular structure consists of the following: knowledge base, inference engine or reasoning mecha- nism and user interface (Fig. 1):
--The knowledge base contains the expert's knowl- edge in the form of facts and rules. Rules are conditional statements that give the action that occurs if a specific condition is satisfied, and they are generally based on the problem-solving exper- tise developed by human experts.
--The inference engine is a computer program which simulates the user's deductive thinking. It applies a
450 ISTV,~N MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
Expert system
Knowledge base I
Inference engine ~ User interface 1 2
Fig. 1. The structure of an expert system.
User
==J I°put I Output
reasoning strategy, and generates solutions based on the rules in the knowledge base and the data collected by the ES.
- - T h e user interface links the ES with the user and makes possible the data input about the special subject under discussion.
Table 1 shows the main differences between conven- tional programming and an ES. Whereas in conven- tional programs the data get mixed in with the control structures, the constituents of an expert system make separate units, thus improving their flexibility. The problem-solving methods of expert systems are pre- dominantly heuristic, in contrast with conventional pro- grams, which are more suited to numerical solutions. The ES of course makes use of numerical methods, that is conventional programming, too.
3. RELIABILITY EVALUATION OF ELECTRICAL POWER NETWORKS USING THE METHOD OF
MARKOVIAN MINIMAL CUT SETS, TAKING INTO ACCOUNT SOME STOCHASTIC
DEPENDENCIES
Taking account of various stochastic dependencies related to component outages in electric power networks results in a more accurate evaluation of the reliability parameters for the system. A brief discussion of some stochastic dependencies is presented in Appendix A. It is convenient to build them into the state space of the Markovian minimal cut sets, which can be derived from the physical structure of the network. As is well-known, only the influence of the first-, second- and third-order minimal cuts on the system reliability indices is of interest. The stochastic dependencies considered and built into the state space of minimal cuts, obtained by the fault-tree method and
Table 1. Comparison of conventional programming and ES
Conventional Expert system program
Problem --Knowledge based Numerical solution --Numerical Method --Heuristic search Algorithmic
--Algorithmic The knowledge --Precise Precise used --Fuzzy Programming Modular Structured strategy (flexible) (rigid)
described mathematically by the method of most prob- able transitions, are as follows: common-mode failures, limited repair capacities, outage postponabilities and simultaneous performance of maintenance and repair by only one repair team (Appendix A).
In connection with the development of the state space for minimal cuts (Appendix B) and the evalu- ation of the reliability of the electric power network, the following general assumptions were made:
1. The supply and load points in the network will be assumed to be 100% reliable.
2. The network protection system will also be assumed to be 100% reliable.
3. Both spontaneous and postponable outages will be taken into account. This means that the com- ponents will immediately be selectively switched off by short circuits or heavy transformer fail- ures, while the switch-off will follow at an appro- priate moment after line-to-ground faults in networks with low-impedance neutral earthing for fault current limitation, or slight transformer failures. Automatic circuit reclosing for the elimination of temporary line-to-ground faults are not considered as outages.
4. False breaker operations (openings) are excluded.
5. Lines and transformers represent the system components. All components are assumed to have unlimited transmission capacity, i.e. follow- ing an outage of one of them, another one is able to take over the entire loading without overload- ing.
6. The repair (or replacement) of components which are not operational starts immediately. Only one team is available for repair, as well as for maintenance. This means that the component which is not operational (or is being maintained) first will also be by an outage of a second compo- nent repaired (or maintained) first.
7. The components are maintained at stated inter- vals, assuming that switch-offs for maintenance cannot be scheduled during process-determined out-of-operation periods of the network (if such exist).
8. Simultaneous maintenance of several compo- nents is excluded.
9. The switching-off for maintenance of a compo-
ISTV/~N MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS 451
nent can be postponed if other components are non-operational.
10. Maintenance cannot be interrupted, i.e. if during the maintenance of one component an outage of a second one occurs, the maintenance of the first one must be finished before starting with the repair of the second component.
11. The following common-mode failures will be considered: • An additional outage of one component as a
consequence of an outage of another compo- nent, e.g. multiple line-to-ground faults in networks with earth-leakage compensation or a double-line outage due to flashover caused by a lightning stroke into the shield wire.
• An additional outage of one component as a consequence of the maintenance of another component, e.g. maintenance switch-offs can cause further outages, due to mis-switchings or overloading.
When using the first-order minimal cut the common- mode failure is non-existent; moreover, the third-order minimal cut's state space is fairly complicated. The inclusion of the above-mentioned stochastic dependen- cies is therefore best illustrated by the second-order one. Figure A12 in Appendix A shows the state-space diagram for a two-component system, with limited repair capacities already included, i.e. both mainten- ance and repair are performed by only one team. This model corresponds to a second-order minimal cut, and will further be used as a basis for developing a cut- model which is modified by both the remaining stochas- tic dependencies.
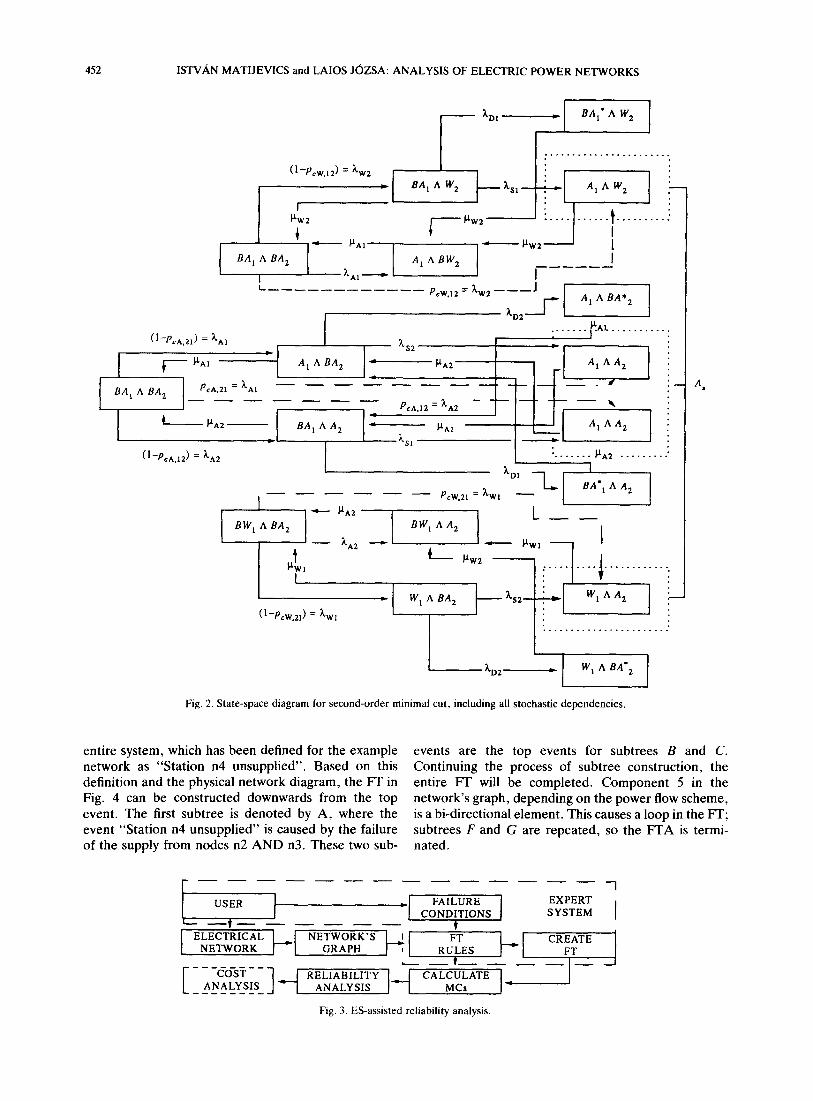
Now, building the common-mode failures and the outage postponabilities from Appendix A into this base model, one can finally get the overall second-order cut model, modified by all the stochastic dependencies, as shown in Fig. 2. All the explanations concerning states and transitions given in Appendix A are valid here as well. In addition, if the proportion of simultaneous outages of component k when component i is non- operational, related to component i's total number of outages is denoted by PGA.ki, the common-mode outage rate becomes PGA,ki " 2Ai" Likewise, if the proportion of simultaneous outages of component k when component i was being maintained related to component t's total number of maintenances is denoted by P~w.ki, the common-mode outage rate becomes P,,.ki "~,,~. AS shown in Appendix A, in cases where both the spon- taneous and the postponable outages are considered, the overall outage rate of component i equals the sum of both outage rates: ADi which represents the postpon- able outages, and 2si which represents the spontaneous outages.
The third-order minimal cuts, including stochastic dependencies, could be developed in a similar manner. In order to determine the minimal cuts from the distri- bution network's scheme, the fault-tree method was
applied. Finally, the reliability indices of the system can be calculated by the minimal cut set method, consider- ing only the most probable state-transitions within the minimal cut's state space. In this way, only the direct, decoupled paths without any loops between the starting and ending states will be passed through (shown here by thick lines in all the state-space diagrams), and are then easy to treat mathematically.
It is apparent from Fig. 2 that the outage postponabilities do not have a direct influence on the reliability calculations, since all transitions to or from such postponed outage states are not parts of the most probable paths. However, there is an indirect influence through the outage rate As = 2 - 2D-
4. EXPERT-SYSTEM-ASSISTED FAULT-TREE ANALYSIS
This section presents an ES-based approach for fault- tree construction in electrical network reliability analy- sis, using the network graph and yielding the minimal cuts for the further evaluation of the reliability indices.
The fault-tree (bT) method is widely used in the qualitative and quantitative reliability analysis of elec- trical networks. 4 The b-q" analysis is, basically, a syste- matic discussion of the system failure events, as well as of the subsystem and component failure events causing them. Figure 3 shows the structure of the principle of the ES-assistance in the fault-tree and reliability analy- sis.
The fault-tree analysis (FTA) is based on graph theory. The tree is a graph, branches of which are connected without forming any loops. It is sometimes impossible to satisfy this condition by an VI" construc- tion for electrical networks, so the loops which are formed must then be solved in an appropriate manner.
An FT is a logical tree where the branches represent the failure events at the system, subsystem or compo- nent levels, and the nodes represent logical operations which relate the failure events to their inputs and outputs. An FT originates from a single event at the root of the tree, called the top event. All the events causing the top event appear on the next level, and the tree is continued in this manner through all the subse- quent levels. The top event always represents the system failure, which must be defined in terms of the system-failure criteria. The FT construction along the series of branches is terminated whenever a component-failure event is reached.
The FT construction will be illustrated here by the example of the bridge-circuit shown in Fig A13 in Appendix B. For the sake of simplicity, the branches are denoted by numbers 1 . . . . ,5, instead of ll . . . . . Is.
The states of the network are listed in Table 2, where the numbers denote the components in an outage state and the successful states are all those in which the load point supply is guaranteed.
The top event in the VI' represents a failure of the
452 ISTVAN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
(1--PEA,21) = XA1
B A t A BA 2
(1-Pew.12) = ~'W2
I t
[tW2
I 1 BA 1 A BA 2
I ~'A: I
~A1
PEA,21 = ~'AI
~A2 .- D. [
(I--PeA,12) = ~A2
( BA] A W 2
A 1 A BW 2 IB ,
~DI It' I BAI* A W 2 [
I [ . . . . . . . .
I ' I
~'s2
"L I A] A BA 2 4
Pcw,12 = ~w2
BA 1 A A 2
~A2
. . . . J
o2rla'A'"21 i i
i !
AIA 2 I
kD1 1 - - '~1' BA'~ A ,t 2
t
PcA,I 2 = ~'A2
1 hi, A1
PEW,21 = ~'Wl
BW l A BA 2 BW l A A 2
~'A2 ~ - ~ lAW1
g~w~ ~ rtw2
f
(1 -W -/"c .21 ) = ~'Wl , {_ W 1 A B A 2 ~'s2--
I
I W] A A 2 ~-
. . . . . . . . . . . . . . . . . . . . . . .
~'O2 -__ W] A BA* 2
Fig. 2. State-space diagram for second-order minimal cut, including all stochastic dependencies.
A,
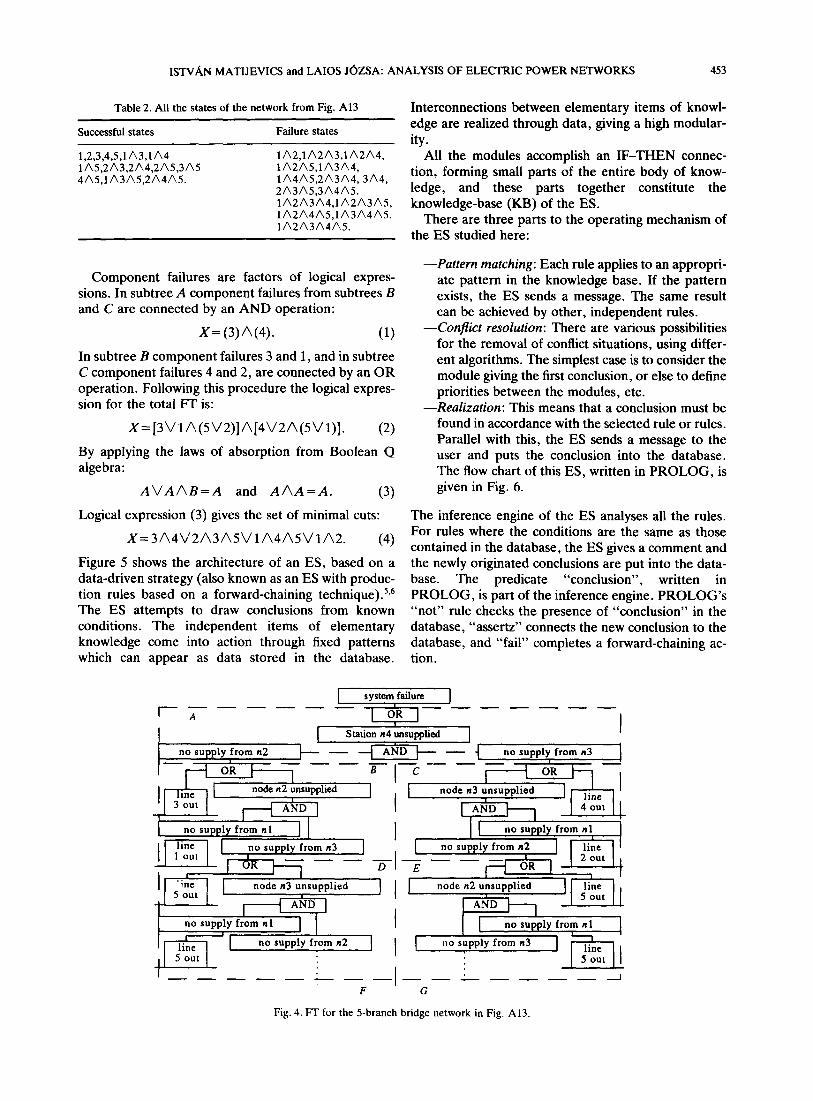
entire system, which has been defined for the example network as "Station n4 unsupplied". Based on this definition and the physical network diagram, the FT in Fig. 4 can be constructed downwards from the top event. The first subtree is denoted by A, where the event "Station n4 unsupplied" is caused by the failure of the supply from nodes n2 AND n3. These two sub-
events are the top events for subtrees B and C. Continuing the process of subtree construction, the entire FT will be completed. Component 5 in the network's graph, depending on the power flow scheme, is a bi-directional element. This causes a loop in the F-I'; subtrees F and G are repeated, so the FTA is termi- nated.
I USER I t
NETWORK GRAPH
I COST --1 ~ RELIABILITY _ ANALYSIS_ .J - ] ANALYSIS
]
• I FAILURE I EXPERT I CONDITIONS SYSTEM
t ~_~j[ FT ~ '~ l CREATE J
RULES FT
Fig. 3. ES-assisted reliability analysis.
ISTV,~N MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS 453
Table 2. All the states of the network from Fig. A13
Successful states Failure states
1,2,3,4,5,1A3,1A4 1A5,2A3,2A4,2A5,3A5 4A5,1A3A5,2A4A5.
1A2,1A2A3,1A2A4, 1A2A5,1A3A4, 1A4A5,2A3A4,3A4, 2A3A5,3A4A5. 1A2A3A4,1A2A3A5, 1A2A4A5,1A3A4A5. 1A2A3A4A5.
Interconnections between elementary items of knowl- edge are realized through data, giving a high modular- ity.
All the modules accomplish an IF-THEN connec- tion, forming small parts of the entire body of know- ledge, and these parts together constitute the knowledge-base (KB) of the ES.
There are three parts to the operating mechanism of the ES studied here:
Component failures are factors of logical expres- sions. In subtree A component failures from subtrees B and C are connected by an AND operation:
X = (3)A(4). (1)
In subtree B component failures 3 and 1, and in subtree C component failures 4 and 2, are connected by an OR operation. Following this procedure the logical expres- sion for the total FT is:
X = [3V 1 A ( 5 V 2 ) ] A [ a V 2 A ( 5 W 1)]. (2)
By applying the laws of absorption from Boolean Q algebra:
A V A A B = A and A A A = A . (3)
Logical expression (3) gives the set of minimal cuts:
X = 3 A 4 V 2 A 3 A 5 V I A 4 A 5 V 1 A 2 . (4)
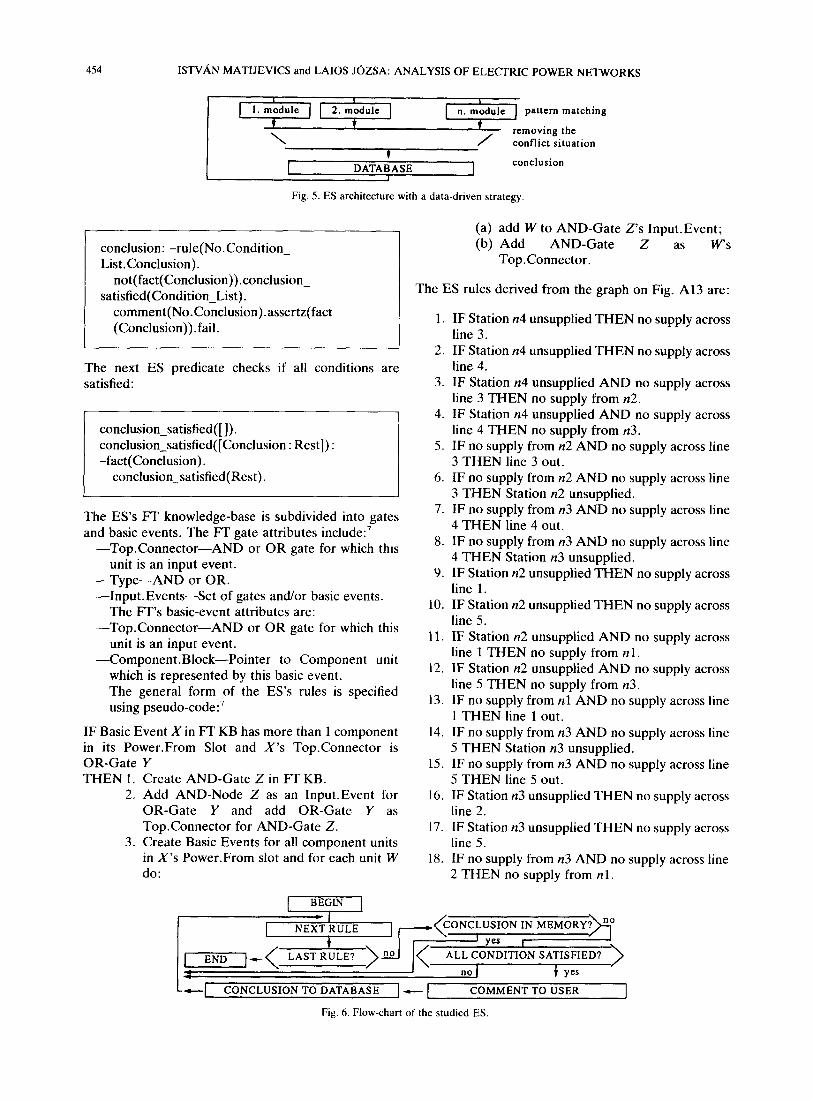
Figure 5 shows the architecture of an ES, based on a data-driven strategy (also known as an ES with produc- tion rules based on a forward-chaining technique). 5"6 The ES attempts to draw conclusions from known conditions. The independent items of elementary knowledge come into action through fixed patterns which can appear as data stored in the database.
--Pattern matching: Each rule applies to an appropri- ate pattern in the knowledge base. If the pattern exists, the ES sends a message. The same result can be achieved by other, independent rules.
--Conflict resolution: There are various possibilities for the removal of conflict situations, using differ- ent algorithms. The simplest case is to consider the module giving the first conclusion, or else to define priorities between the modules, etc.
--Realization: This means that a conclusion must be found in accordance with the selected rule or rules. Parallel with this, the ES sends a message to the user and puts the conclusion into the database. The flow chart of this ES, written in PROLOG, is given in Fig. 6.
The inference engine of the ES analyses all the rules. For rules where the conditions are the same as those contained in the database, the ES gives a comment and the newly originated conclusions are put into the data- base. The predicate "conclusion", written in PROLOG, is part of the inference engine. PROLOG's "not" rule checks the presence of "conclusion" in the database, "assertz" connects the new conclusion to the database, and "fail" completes a forward-chaining ac- tion.
I A
I no supply from n2 1 - -
i
1' no supply f r ~
~ [ node n2 unsupplied [
' no supply from nl
[ ~ 1 "J°uL I [ no supply fromn2 I
system failure ]
Station n4 unsupplied I I • t' no supply from n3 ]
I 3 C
nodo.3 unsupplied i r--e:~l-- i I I ~ p l , from.11 do';t I I!
no supply from n2 I ~ I _ i I
~ p l y from nl [
I I ,,o supply from.3
I - F G
Fig. 4. FT for the 5-branch bridge network in Fig. A13.
454 ISTV~,N MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
, I I I
I 1. module I1" 2. module [ I n. module ]pattern matching
~' ' ~' ~' removing the J conflict situation
V [ DATABASE [ conclusion
Fig. 5. ES architecture with a data-driven strategy.
conclusion: -rule(No. Condition_ List.Conclusion).
not (fact(Conclusion)).conclusion_ satisfied(Condition_List).
comment(No. Conclusion). assertz(fact (Conclusion)) .fail.
The next ES predicate checks if all conditions are satisfied:
conclusion_satisfied([ ]). conclusion satisfied([Conclusion : Rest]) : -fact(Conclusion).
conclusion_satisfied(Rest).
The ES's FT knowledge-base is subdivided into gates and basic events. The FT gate attributes include: 7
- -Top .Connec tor - -AND or OR gate for which this unit is an input event.
- - T y p e - - A N D or OR. - - Input .Events--Set of gates and/or basic events.
The FT's basic-event attributes are: - -Top .Connec tor - -AND or OR gate for which this
unit is an input event. ---Component.Block--Pointer to Component unit
which is represented by this basic event. The general form of the ES's rules is specified using pseudo-code: 7
IF Basic Event X in FF KB has more than 1 component in its Power.From Slot and X's Top.Connector is OR-Gate Y THEN 1. Create AND-Gate Z in FT KB.
2. Add AND-Node Z as an Input.Event for OR-Gate Y and add OR-Gate Y as Top.Connector for AND-Gate Z.
3. Create Basic Events for all component units in X's Power.From slot and for each unit W do:
(a) add W to AND-Gate Z's Input.Event; (b) Add AND-Gate Z as W's
Top.Connector.
The ES rules derived from the graph on Fig. A13 are:
1. IF Station n4 unsupplied THEN no supply across line 3.
2. IF Station n4 unsupplied THEN no supply across line 4.
3. IF Station n4 unsupplied AND no supply across line 3 THEN no supply from n2.
4. IF Station n4 unsupplied AND no supply across line 4 THEN no supply from n3.
5. IF no supply from n2 AND no supply across line 3 THEN line 3 out.
6. IF no supply from n2 AND no supply across line 3 THEN Station n2 unsupplied.
7. IF no supply from n3 AND no supply across line 4 THEN line 4 out.
8. IF no supply from n3 AND no supply across line 4 THEN Station n3 unsupplied.
9. IF Station n2 unsupplied THEN no supply across line 1.
10. IF Station n2 unsupplied THEN no supply across line 5.
11. IF Station n2 unsupplied AND no supply across line 1 THEN no supply from nl .
12. IF Station n2 unsupplied AND no supply across line 5 THEN no supply from n3.
13. IF no supply from nl AND no supply across line 1 THEN line 1 out.
14. IF no supply from n3 AND no supply across line 5 THEN Station n3 unsupplied.
15. IF no supply from n3 AND no supply across line 5 THEN line 5 out.
16. IF Station n3 unsupplied THEN no supply across line 2.
17. IF Station n3 unsupplied THEN no supply across line 5.
18. IF no supply from n3 AND no supply across line 2 THEN no supply from nl.
[ BEGIN ] ""1 . ~ , CONCLUSION IN MEMORY? no
I [ NEXT RULE ] , ~ - ' ~ I Yes F
[~__~S DC N ~LU~sIoL__NA~oT~A'9 > n o [ 1 ( ALL CONDITION SATISFIED? ) n o , ,yes
O SE I - .~-- - [ COMMENT TO USER I
Fig. 6. Flow-chart of the studied ES.
ISTVAN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS 455
[ CREATING THE ES RULES FROM THE NETWORK'S GRAPH I I
[ NODE LIST<=--tl I I NODE ,== ,OAD POINT I
I
: i NODE LIST <== NODE LIST + NODE I
[WORKING MEMORY <== RULES IN'CONNECTION WITH ACTUAL NODE I
CREATINa THE BOOLEAN EXPRESSIdN WITH ELEMENTS IN OUTAGE STATE I [ NODE <-- NODE + NODE WITHOUT SUPPLY [
no [ NODE = SUPPLY POINT? ] |
I END i
Fig. 7. The execution of ES rules in the flow-chart form.
t t n4, n3, n2, n3
,~ n4, n3, n2 n4, n3, n2, nl { n4, n3 n4, n3, nl ~
n4 n4, n2, n3 n4, n2, n3, nl -~- n4, n2 ~ n4, n2, nl .4. n4, n2, n3, n2
¢ ¢
Fig. 8. Tree form of the algorithm.
19. IF no supply from n3 AND no supply across line 5 THEN no supply from n2.
20. IF no supply from nl AND no supply across line 2 THEN line 2 out.
21. IF no supply from n2 AND no supply across line 5 THEN Station n2 unsupplied.
22. IF no supply from n2 AND no supply across line 5 THEN line 5 out.
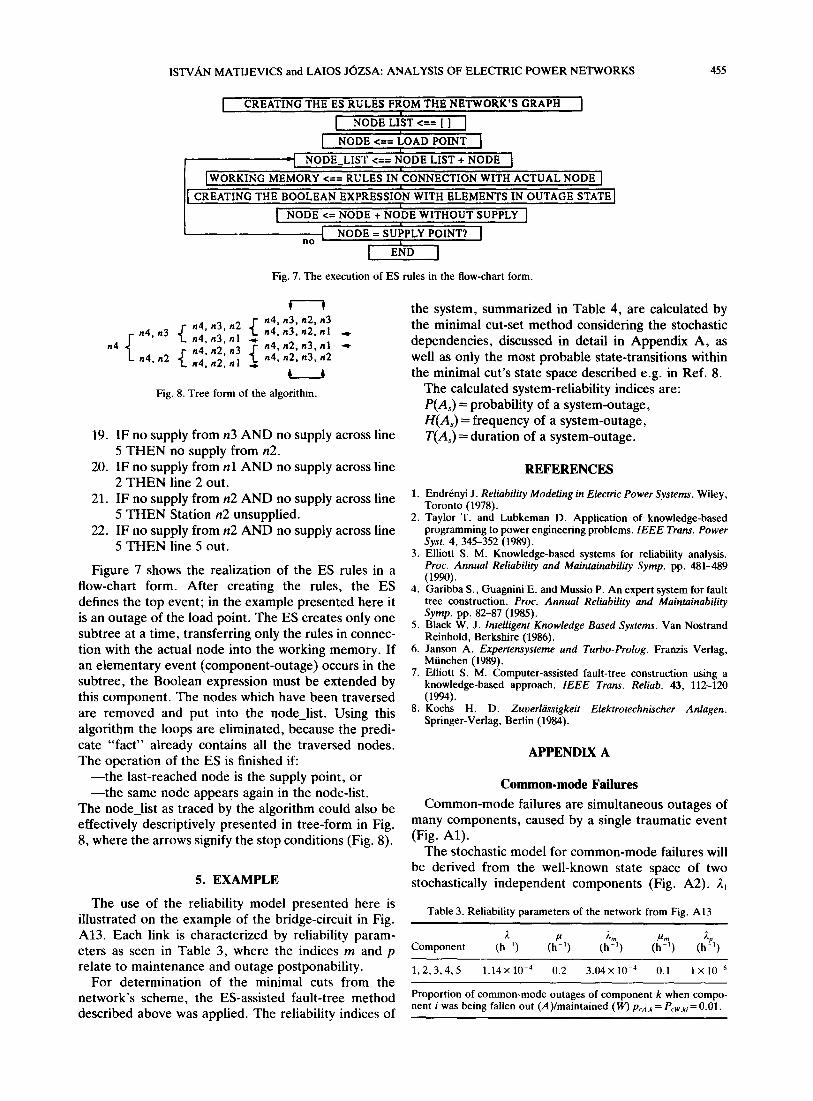
Figure 7 shows the realization of the ES rules in a flow-chart form. After creating the rules, the ES defines the top event; in the example presented here it is an outage of the load point. The ES creates only one subtree at a time, transferring only the rules in connec- tion with the actual node into the working memory. If an elementary event (component-outage) occurs in the subtree, the Boolean expression must be extended by this component. The nodes which have been traversed are removed and put into the node_list. Using this algorithm the loops are eliminated, because the predi- cate "fact" already contains all the traversed nodes. The operation of the ES is finished if:
- - the last-reached node is the supply point, or -- the same node appears again in the node-list.
The node_list as traced by the algorithm could also be effectively descriptively presented in tree-form in Fig. 8, where the arrows signify the stop conditions (Fig. 8).
5. EXAMPLE
The use of the reliability model presented here is illustrated on the example of the bridge-circuit in Fig. A13. Each link is characterized by reliability param- eters as seen in Table 3, where the indices m and p relate to maintenance and outage postponability.
For determination of the minimal cuts from the network's scheme, the ES-assisted fault-tree method described above was applied. The reliability indices of
the system, summarized in Table 4, are calculated by the minimal cut-set method considering the stochastic dependencies, discussed in detail in Appendix A, as well as only the most probable state-transitions within the minimal cut's state space described e.g. in Ref. 8.
The calculated system-reliability indices are: P(As) --- probability of a system-outage, H(As) = frequency of a system-outage, T(A,) = duration of a system-outage.
REFERENCES
1. Endr6nyi J. Reliability Modeling in Electric Power Systems. Wiley, Toronto (1978).
2. Taylor T. and Lubkeman D. Application of knowledge-based programming to power engineering problems. IEEE Trans. Power Syst. 4, 345-352 (1989).
3. Ellion S. M. Knowledge-based systems for reliability analysis. Proc. Annual Reliability and Maintainability Syrup. pp. 481-489 (1990).
4. Garibba S., Guagnini E. and Mussio P. An expert system for fault tree construction. Proc. Annual Reliability and Maintainability Syrup. pp. 82-87 (1985).
5. Black W. J. Intelligent Knowledge Based Systems. Van Nostrand Reinhold, Berkshire (1986).
6. Janson A. Expertensysteme und Turbo-Prolog. Franzis Verlag, Miinchen (1989).
7. Ellion S. M. Computer-assisted fault-tree construction using a knowledge-based approach. IEEE Trans. Reliab. 43, 112-120 (1994).
8. Kochs H. D. Zuverli~ssigkeit Elektrotechnischer Anlagen. Springer-Verlag, Berlin (1984).
APPENDIX A
Common-mode Failures
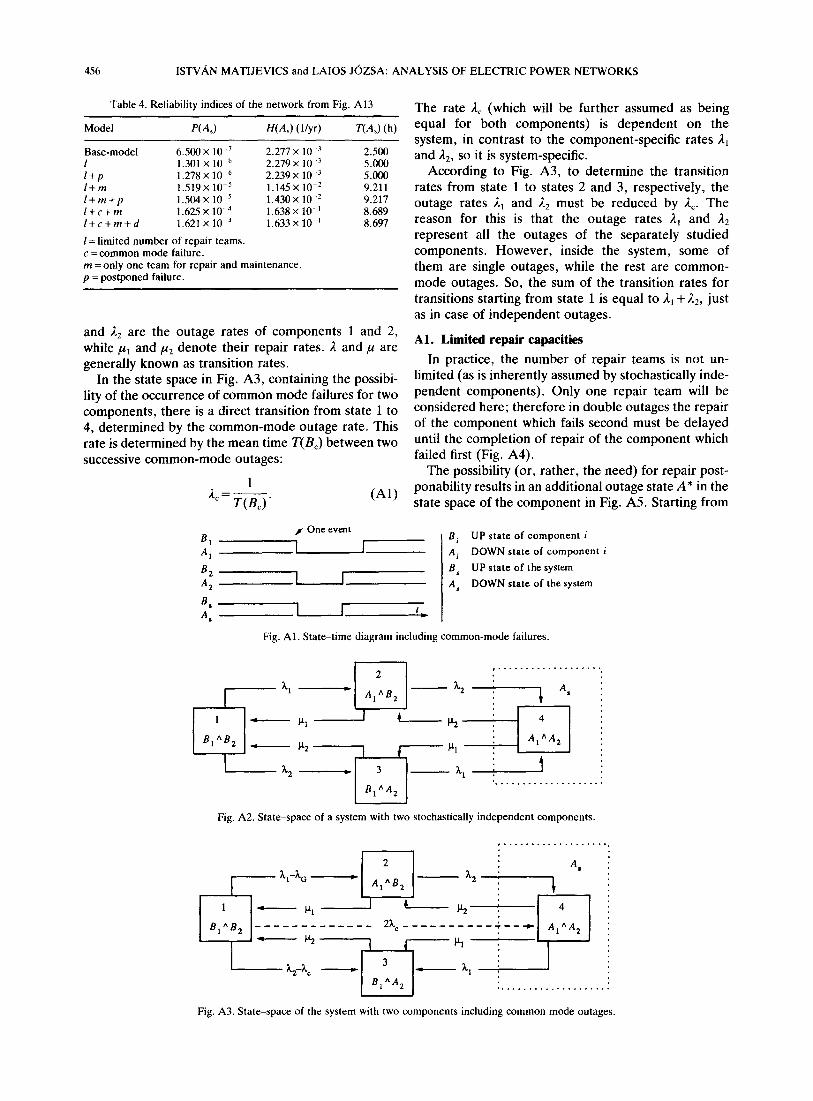
Common-mode failures are simultaneous outages of many components, caused by a single traumatic event (Fig. A1).
The stochastic model for common-mode failures will be derived from the well-known state space of two stochastically independent components (Fig. A2). 21
Table 3. Reliability parameters of the network from Fig. AI3
2 # ~'~ #" h'-2°t) Component (h t) (h-t) (h-l) (h 1) (
1 ,2 ,3,4,5 1.14×10 4 0.2 3.04×10 -4 0.1 1×10 6
Proportion of common-mode outages of component k when compo- nent i was being fallen out (A)/maintained (140 PcA.k = Pcw.ki = 0.01.
456 ISTVAN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
Table 4. Reliability indices of the network from Fig. A13
Model P(As) H(As) (1/yr) T(As) (h)
Base-model 6.500 x 10 -7 2.277 × 10 _3 2.500 / 1.301 × 10 ~ 2.279 × 10 -3 5.000 l+p 1.278 x 10 6 2.239 × 10 _3 5.000 l+ m 1.519 x 10 -5 1.145 x l0 -2 9.211 1 + m + p 1.504 x 10 -5 1.430 × 10 -2 9.217 / + c + rn 1.625 × 10 -a 1.638 × 10 1 8.689 l + c + m + d 1,621x10 a 1.633×10 ' 8.697
1= limited number of repair teams. c = common mode failure. m = only one team for repair and maintenance. p = postponed failure.
and 22 are the outage rates of components 1 and 2, while/~t and/~2 denote their repair rates. 2 and/t are generally known as transition rates.
In the state space in Fig. A3, containing the possibi- lity of the occurrence of common mode failures for two components, there is a direct transition from state 1 to 4, determined by the common-mode outage rate. This rate is determined by the mean time T(B¢) between two successive common-mode outages:
1 2c- T(Bc) (A1)
The rate 2c (which will be further assumed as being equal for both components) is dependent on the system, in contrast to the component-specific rates 21 and 22, so it is system-specific.
According to Fig. A3, to determine the transition rates from state 1 to states 2 and 3, respectively, the outage rates 21 and 22 must be reduced by 2c. The reason for this is that the outage rates 2~ and 22 represent all the outages of the separately studied components. However, inside the system, some of them are single outages, while the rest are common- mode outages. So, the sum of the transition rates for transitions starting from state 1 is equal to 21 + ~,2, just as in case of independent outages.
AI. Limited repair capacities
In practice, the number of repair teams is not un- limited (as is inherently assumed by stochastically inde- pendent components)• Only one repair team will be considered here; therefore in double outages the repair of the component which fails second must be delayed until the completion of repair of the component which failed first (Fig. A4).
The possibility (or, rather, the need) for repair post- ponability results in an additional outage state A* in the state space of the component in Fig. A5. Starting from
B 1
A1
B 2 A 2
B, A,
f One event
1
I I
I J t m
B~ UP state of component i
A i DOWN state of component i
B UP state of the system
A s DOWN state of the system
Fig. AI . State-time diagram including common-mode failures.
I 11
B t ^ B 2
I
121 A]^B 2 a
I a:a l " I - ' ' B I ^ A 2
Fig. A2. State-space of a system with two stochastically independent components.
2
P A ^ B 2
t
2~ c
[3t I B I A A 2
A,
~2 1
I I ' 4
- - ~ - - ~ A I A A 2
Fig. A3. State-space of the system with two components including common mode outages.
ISTV/kN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS 457
h/Outage 1 Bt
A 1
Start of repair 1 ~ ] End of repair 1 Outage 2
B 2 A°2 I A2 I l - - I
Start of repair 2 I L End of repair 2
B, [ I A, I.,.______..~ I System-outage
Fig. A4. State-time diagram including repair postponability.
1 " - . ' 7 " - - ' 1 Outage state with postponable repair
- - ' - - + ' I "_ I . . . . . + ~ - ~ _ ~ , ~- ~ . Component-specific transition
t I " t x I I - - .4.. System-specific transition
Fig. A5. State-space of a single component including repair postponability.
[
Pu
IX2 I
X2 Bt A A2 _ _ Ix2 :-- S -
7, 2 ~,-
+1 t- A I ^ A . 2
A I
A* 1 ̂ A 2
. . . . . . . . . . . . . . . . . .
Fig. A6. State-space for a system with only one repair team,
B 1
A l
B 2
A 2
B~ A
B" 1
B* 2.
~,/Outage 1
I I Outage 2 ,~ l Postponable switch-off
I - - -q-- [ ! •
Fig. A7. State-time diagram including postponable outages.
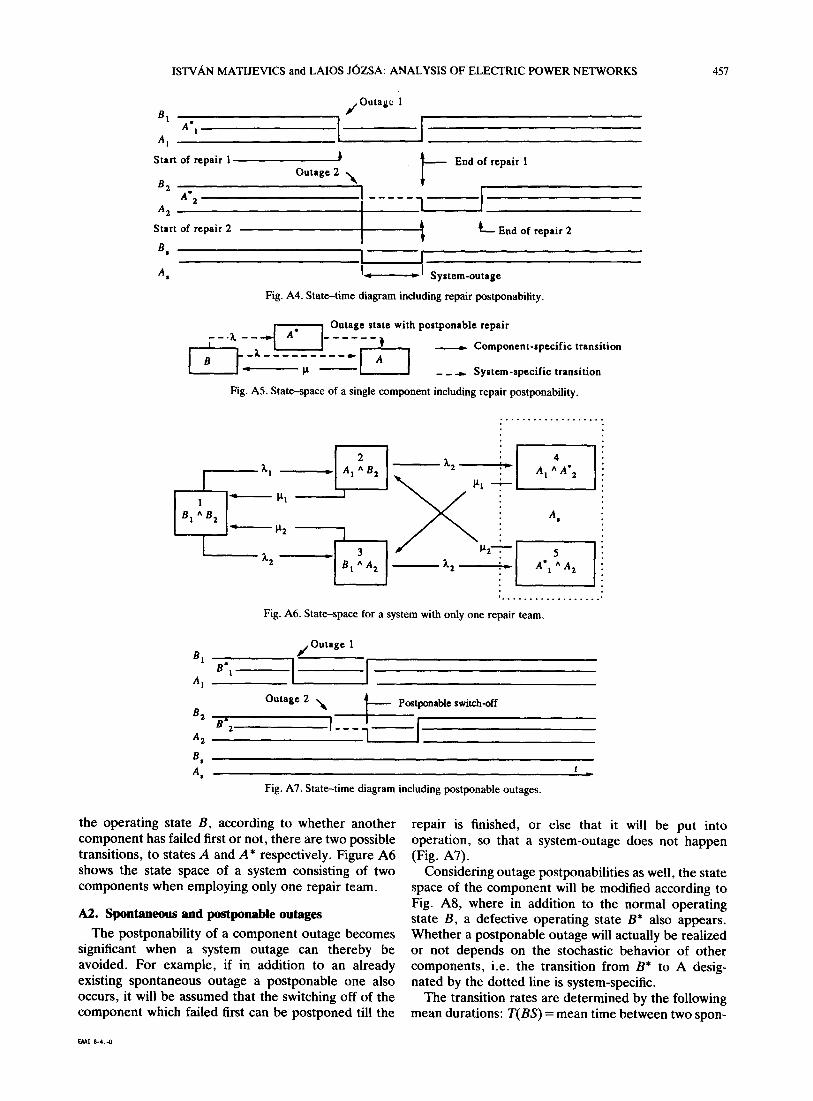
the operating state B, according to whether another component has failed first or not, there are two possible transitions, to states A and A* respectively. Figure A6 shows the state space of a system consisting of two components when employing only one repair team.
A2. Spontaneous and postponable outages
The postponability of a component outage becomes significant when a system outage can thereby be avoided. For example, if in addition to an already existing spontaneous outage a postponable one also occurs, it will be assumed that the switching off of the component which failed first can be postponed till the
repair is finished, or else that it will be put into operation, so that a system-outage does not happen (Fig. A7).
Considering outage postponabilities as well, the state space of the component will be modified according to Fig. A8, where in addition to the normal operating state B, a defective operating state B* also appears. Whether a postponable outage will actually be realized or not depends on the stochastic behavior of other components, i.e. the transition from B* to A desig- nated by the dotted line is system-specific.
The transition rates are determined by the following mean durations: T(BS) = mean time between two spon-
~I8-4 , -0
458 ISTVAN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
[ . . _ _ ~ D _ _ . . . ~ - 1 Operating state with postponable switch-off
. . . . . . ~ - Component-specific transition "F-1 ~t - - -*- System-specific transition
Fig. A8. State-space of a single component including outage postponability.
B2~~- btl
~_ , ~t 2
~'2
I ~ D 2
2 , la 1 k A 1 ̂ B 2
/ '~1 3 l
B 1 ^ A 2
'~'vl
" IA14..2
. . . . . . . t . . . . . . . . . . . . .
l I 5 A1 A A2 Aj
m
. . . . . . . . . . . . . . . . . . . .
B* 1 ^ A 2
Fig. A9. State-space for a system with spontaneous and postponable outages.
Planned Delayed maintenance maintenance
B1
W 1
Outage ~ I
B 2
A2 [ [ W 2
B s t
A s ~- W i = maintenance state of the ith component
Planned maintenance
B 1
W 1
Outage ~ 82 [
W2 A2
B } ' , As -4--------~ I System-outage
Fig. A10. State-time diagram including simultaneous performed repair and maintenance.
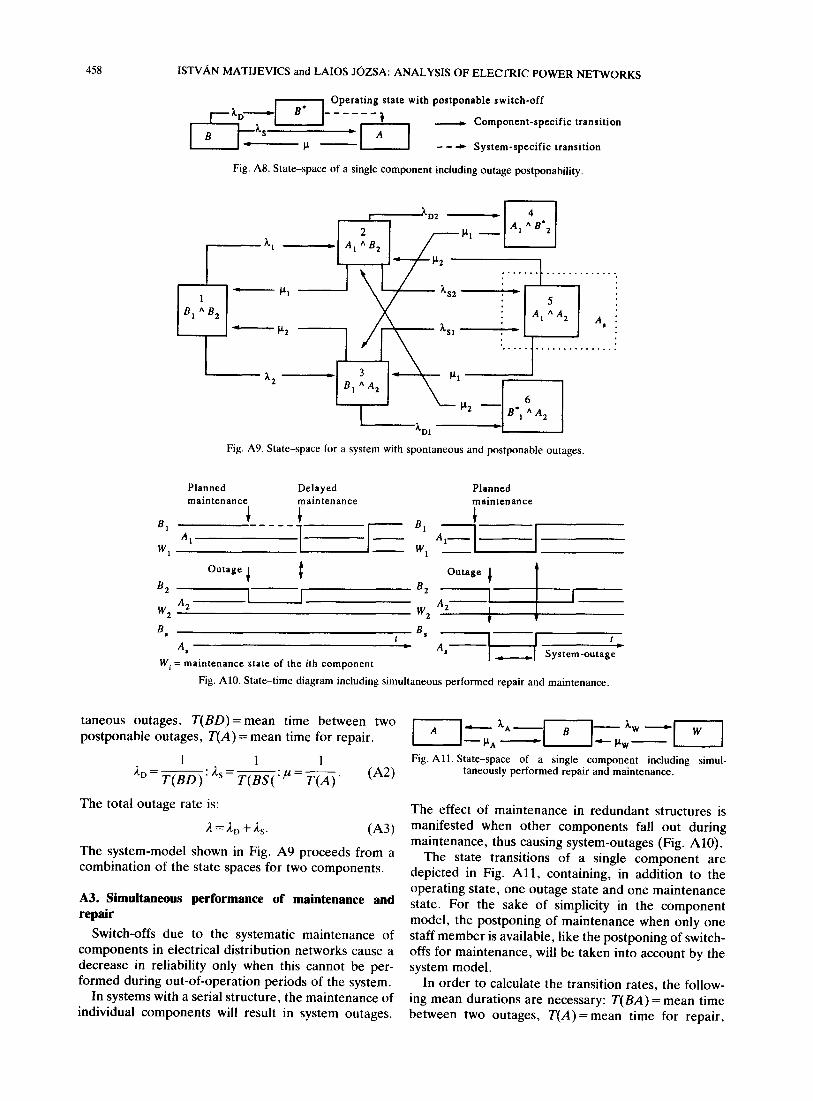
taneous outages, T(BD)=mean time between two postponable outages, T(A)= mean time for repair.
1 1 1 2D = T(ffD-): 2s - T(BS( : I~ = T(A)" (A2)
The total outage rate is:
2 = 2D + )Is. (A3)
The system-model shown in Fig. A9 proceeds from a combination of the state spaces for two components.
A3. Simultaneous performance of maintenance and repair
Switch-offs due to the systematic maintenance of components in electrical distribution networks cause a decrease in reliability only when this cannot be per- formed during out-of-operation periods of the system.
In systems with a serial structure, the maintenance of individual components will result in system outages.
Fig. A l l . State-space of a single component including simul- taneously performed repair and maintenance.
The effect of maintenance in redundant structures is manifested when other components fall out during maintenance, thus causing system-outages (Fig. A10).
The state transitions of a single component are depicted in Fig. A l l , containing, in addition to the operating state, one outage state and one maintenance state. For the sake of simplicity in the component model, the postponing of maintenance when only one staff member is available, like the postponing of switch- offs for maintenance, will be taken into account by the system model.
In order to calculate the transition rates, the follow- ing mean durations are necessary: T(BA)= mean time between two outages, T(A)=mean time for repair,
ISTVAN MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS 459
B 1 ̂ W 2 ;~Al '
I P'w2 !
F ~ ' A I *- ^ --
~A2
B 1 ̂ B 2 .4--. ~tA1 !
I L ~ ' A I '~ B I ̂ A 2 ~'AI
gwl l~i.l
[ ~Wl t-
5 W 1 ̂ B 2 7-A2
6 B- AI ^ --I1l 2
7 L AI AA2
i
? I 8
D- A1 ^ A2
9 ~- W 1 ̂ A 2
I A
Fig. A12. State-space for a two-component system including simultaneously performed repair and maintenance.
Supply it n2 13 Load ly point point
s I" I -I 12 n 3 14
Fig. A13. Example network.
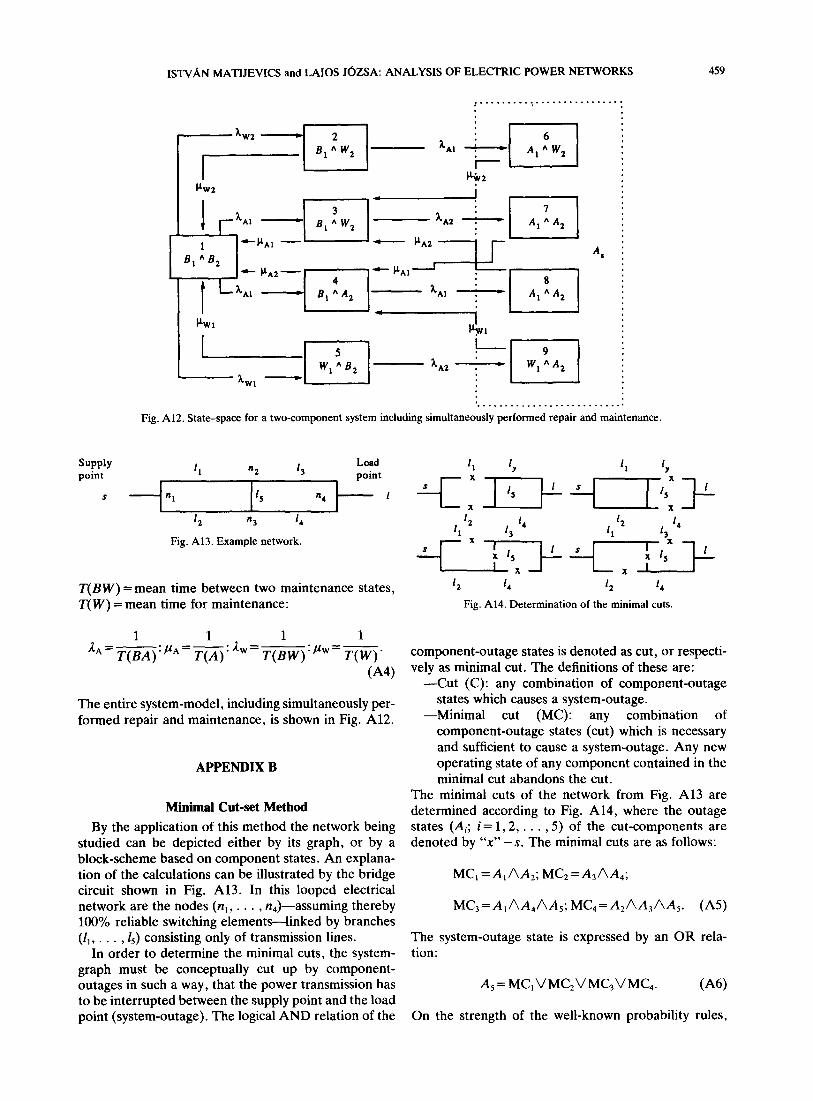
T(BW) = mean time between two maintenance states, T(W) = mean time for maintenance:
1 1 1 1 2A = T(BA): PA = T(A): 2w = T(BW):/Uw = T(W)"
(A4)
The entire system-model, including simultaneously per- formed repair and maintenance, is shown in Fig. A12.
APPENDIX B
Minimal Cut-set Method
By the application of this method the network being studied can be depicted either by its graph, or by a block-scheme based on component states. An explana- tion of the calculations can be illustrated by the bridge circuit shown in Fig. A13. In this looped electrical network are the nodes (nt, . . . , n4)--assuming thereby 100% reliable switching elements--linked by branches (1~ . . . . . /5) consisting only of transmission lines.
In order to determine the minimal cuts, the system- graph must be conceptually cut up by component- outages in such a way, that the power transmission has to be interrupted between the supply point and the load point (system-outage). The logical AND relation of the
I 1 ' X
l .... X
ii 12 14 12 13 l I 13 1 . . . . . .
x 15 x I x x
12 14 l 2 14
Fig. A14. Determination of the minimal cuts.
I l ly
s I I /
14
"7 Ix ! 5 1 I
component-outage states is denoted as cut, or respecti- vely as minimal cut. The definitions of these are:
- -Cut (C): any combination of component-outage states which causes a system-outage.
--Minimal cut (MC): any combination of component-outage states (cut) which is necessary and sufficient to cause a system-outage. Any new operating state of any component contained in the minimal cut abandons the cut.
The minimal cuts of the network from Fig. A13 are determined according to Fig. A14, where the outage states (A,.; i = 1, 2 . . . . ,5) of the cut-components are denoted by " x " - s . The minimal cuts are as follows:
MCI = A 1 A A 2 ; MC2 = A 3 A A 4 ;
MC3=AIAA4AAs; MC4=AJ~A3AAs. (A5)
The system-outage state is expressed by an OR rela- tion:
A5 = MClV MC2V MC3V MC4. (A6)
On the strength of the well-known probability rules,
460 ISTV/I,N MATIJEVICS and LAIOS JOZSA: ANALYSIS OF ELECTRIC POWER NETWORKS
the probability of the system-outage P(As) can be determined as:
P(A,) = P(MCj V ME2 V ME3 W ME4) (A7)
e(As) = P(MC,) + P(MC2) + P(MC3) + P(MC4)
- P(MC, A MC2) - P(MC2 A ME3)
- P(MC, AMC4) - P(MC2A MC3)
- P(MC2 A ME,) - P(MC3 A MC4)
+ P(MC1 m MC2A MC3) + P(MC1A MC2A MC4)
+ P(MCl AMC3A MC4)
+ P(MC2 A ME3 A ME4)
- P(MC~ AMC2A MC3 A (ME4) (AS)
or generally
P(as) = 2 P M C k ) - E P(MCkAMCt) k k,I
k< l
+ E P(MCkAMC, AMCm)-... (A9) k , l , m
k < l < m
upper estimation (larger than the exact value),
lower estimation (less than the exact value).
Since the probability of the simultaneous occurrence of two or more minimal cuts in general is significantly less than the probability of the occurrence of a single minimal cut, the probability values of the minimal cut combinations in equation (A9) decrease rapidly with the number of cuts contained in the combinations.
In this way for system-outage probability calcula- tions, the following approximate formula can be used:
P(A~) --- E P(MCk) (AIO) k
where for the example being studied k = 1 . . . 4.
AUTHORS' BIOGRAPHIES
Lajos J6zsa was born on 19 December 1945 in Feketic, Yugoslavia. He is an associate professor on the Josip Juraj Strossmayer University of Osijek, Croatia, in the Faculty of Electrical Engineering, Department of Power Engineering, as well as in the Pollack Mihaly Polytechnical Engineering College of Pecs, Hungary, at the Department of Power Engineering. Dr Jozsa received his Certificated Engineer's Degree in electrical power engineering in 1972, the Master's Degree in 1978 and the Doctor of Science Degree in 1984 from the University of Zagreb, Croatia. His special field of scientific interest is power system reliability. lstv~tn Ma~evies was born on 24 May 1952 in Subotica, Yugoslavia. He is an associate professor at the Polytechnical Engineering College of Subotica, Yugoslavia, in the Department of Computer Sciences. Mr Matijevics received his Certificated Engineer's Degree in Computer Science in 1975 from the Technical University of Budapest, Hungary, and a Master's Degree in 1981 from The University of Zagreb, Croatia. His special field of scientific interest is the application of expert systems in power system analysis.