Upload
ricardo-falcon
View
217
Download
0
Embed Size (px)
Citation preview
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
1/189
By
Mr. Richard Andrew WiltshireBachelor of Engineering
(Electrical and Computer Engineering)1
st Class Honours
Doctor of Philosophy
Centre of Energy and Resource ManagementSchool of Engineering Systems
Faculty of Built, Environment and EngineeringQueensland University of Technology
Brisbane, Australia.
2007
Analysis of Disturbances in Large
Interconnected Power Systems
A thesis submitted in partial fulfillment of the requirements for thedegree of
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
2/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
3/189
Abstract
iii
Analysis of Disturbances in Large Interconnected PowerSystems
by Mr. Richard Andrew Wiltshire
Principal Supervisor: Associate Professor Peter O’SheaSchool of Engineering Systems
Faculty of Built, Environment and EngineeringQueensland University of Technology
Associate Supervisor: Professor Gerard LedwichSchool of Engineering Systems
Faculty of Built, Environment and EngineeringQueensland University of Technology
Associate Supervisor: Dr Edward PalmerSchool of Engineering Systems
Faculty of Built, Environment and EngineeringQueensland University of Technology
Abstract
World economies increasingly demand reliable and economical power
supply and distribution. To achieve this aim the majority of power
systems are becoming interconnected, with several power utilitiessupplying the one large network. One problem that occurs in a large
interconnected power system is the regular occurrence of system
disturbances which can result in the creation of intra-area oscillating
modes. These modes can be regarded as the transient responses of the
power system to excitation, which are generally characterised as decaying
sinusoids. For a power system operating ideally these transient responses
would ideally would have a “ring-down” time of 10-15 seconds.
Sometimes equipment failures disturb the ideal operation of powersystems and oscillating modes with ring-down times greater than 15
seconds arise. The larger settling times associated with such “poorly
damped” modes cause substantial power flows between generation nodes,
resulting in significant physical stresses on the power distribution system.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
4/189
Abstract
iv
If these modes are not just poorly damped but “negatively damped”,
catastrophic failures of the system can occur.
To ensure system stability and security of large power systems, the
potentially dangerous oscillating modes generated from disturbances
(such as equipment failure) must be quickly identified. The power utility
must then apply appropriate damping control strategies.
In power system monitoring there exist two facets of critical interest. The
first is the estimation of modal parameters for a power system in normal,
stable, operation. The second is the rapid detection of any substantial
changes to this normal, stable operation (because of equipment
breakdown for example). Most work to date has concentrated on the first
of these two facets, i.e. on modal parameter estimation. Numerous modal
parameter estimation techniques have been proposed and implemented,
but all have limitations [1-13]. One of the key limitations of all existing
parameter estimation methods is the fact that they require very long data
records to provide accurate parameter estimates. This is a particularly
significant problem after a sudden detrimental change in damping. One
simply cannot afford to wait long enough to collect the large amounts of
data required for existing parameter estimators. Motivated by this gap in
the current body of knowledge and practice, the research reported in this
thesis focuses heavily on rapid detection of changes (i.e. on the second
facet mentioned above).
This thesis reports on a number of new algorithms which can rapidly flag
whether or not there has been a detrimental change to a stable operating
system. It will be seen that the new algorithms enable sudden modal
changes to be detected within quite short time frames (typically about 1
minute), using data from power systems in normal operation.
The new methods reported in this thesis are summarised below.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
5/189
Abstract
v
The Energy Based Detector (EBD): The rationale for this method is that
the modal disturbance energy is greater for lightly damped modes than it
is for heavily damped modes (because the latter decay more rapidly).Sudden changes in modal energy, then, imply sudden changes in modal
damping. Because the method relies on data from power systems in
normal operation, the modal disturbances are random. Accordingly, the
disturbance energy is modelled as a random process (with the parameters
of the model being determined from the power system under
consideration). A threshold is then set based on the statistical model. The
energy method is very simple to implement and is computationally
efficient. It is, however, only able to determine whether or not a suddenmodal deterioration has occurred; it cannot identify which mode has
deteriorated. For this reason the method is particularly well suited to
smaller interconnected power systems that involve only a single mode.
Optimal Individual Mode Detector (OIMD): As discussed in the previous
paragraph, the energy detector can only determine whether or not a
change has occurred; it cannot flag which mode is responsible for the
deterioration. The OIMD seeks to address this shortcoming. It uses
optimal detection theory to test for sudden changes in individual modes.
In practice, one can have an OIMD operating for all modes within a
system, so that changes in any of the modes can be detected. Like the
energy detector, the OIMD is based on a statistical model and a
subsequently derived threshold test.
The Kalman Innovation Detector (KID): This detector is an alternative to
the OIMD. Unlike the OIMD, however, it does not explicitly monitor
individual modes. Rather it relies on a key property of a Kalman filter,namely that the Kalman innovation (the difference between the estimated
and observed outputs) is white as long as the Kalman filter model is valid.
A Kalman filter model is set to represent a particular power system. If
some event in the power system (such as equipment failure) causes a
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
6/189
Abstract
vi
sudden change to the power system, the Kalman model will no longer be
valid and the innovation will no longer be white. Furthermore, if there is a
detrimental system change, the innovation spectrum will display strong peaks in the spectrum at frequency locations associated with changes.
Hence the innovation spectrum can be monitored to both set-off an
“alarm” when a change occurs and to identify which modal frequency has
given rise to the change. The threshold for alarming is based on the
simple Chi-Squared PDF for a normalised white noise spectrum [14, 15].
While the method can identify the mode which has deteriorated, it does
not necessarily indicate whether there has been a frequency or damping
change. The PPM discussed next can monitor frequency changes and socan provide some discrimination in this regard.
The Polynomial Phase Method (PPM): In [16] the cubic phase (CP)
function was introduced as a tool for revealing frequency related spectral
changes. This thesis extends the cubic phase function to a generalised
class of polynomial phase functions which can reveal frequency related
spectral changes in power systems. A statistical analysis of the technique
is performed. When applied to power system analysis, the PPM can
provide knowledge of sudden shifts in frequency through both the new
frequency estimate and the polynomial phase coefficient information.
This knowledge can be then cross-referenced with other detection
methods to provide improved detection benchmarks.
Keywords
Power System Monitoring, Interconnected Power Systems, Power System Disturbances, Power System Stability, Signal Processing, Optimal
Detection Theory, Stochastic System Analysis, Kalman Filtering, Poly-
Phase Signal Analysis.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
7/189
Declaration
vii
Declaration
I hereby certify that the work embodied in this thesis is the result of
original research and has not been submitted for a higher degree
at any other University or Institution.
Richard Andrew Wiltshire
10 July 2007
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
8/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
9/189
Table of Contents
ix
Table of Contents
Abstract ............................................................................................................iii
Keywords ......................................................................................................... vi
Declaration ......................................................................................................vii
Table of Contents ............................................................................................. ix
Table of Figures .............................................................................................. xv
List of Tables.................................................................................................. xxi
Acknowledgements......................................................................................xxiii
Dedication ..................................................................................................... xxv
Glossary.......................................................................................................xxvii
Chapter 1 ......................................................................................................... 29
1 Introduction ............................................................................................. 29
1.1 The Analysis of Large Interconnected Power Systems................... 29
1.2 The Monitoring of Australia's Large Interconnected Power System.
……………………………………………………………………..30
1.3 The use of Externally Sourced Simulated Data for Algorithm
Verification ................................................................................................. 31
1.4 Review of Existing Modal Estimation Methods ............................. 33
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
10/189
Table of Contents
x
1.4.1 Single Isolated Disturbance.....................................................33
1.4.1.1 Eigenanalysis of Disturbance Modes .................................. 33
1.4.1.2 Spectral Analysis using Prony’s Method ............................ 34
1.4.1.3 The Sliding Window Derivation .........................................36
1.4.2 Continuous Random Disturbances ..........................................38
1.4.2.1 Autocorrelation Methods..................................................... 38
1.4.2.2 Review of Kalman Filter Innovation Strategies ..................39
1.5 Review of Frequency Estimation Methods .....................................40
1.5.1 Polynomial-Phase Estimation Methods................................... 41
1.6 Conclusion.......................................................................................42
1.7 Organisation of the remainder of the thesis.....................................43
Chapter 2 .........................................................................................................45
2 Rapid Detection of Deteriorating Modal Damping.................................45
2.1 Introduction .....................................................................................45
2.2 The Power System Model in the Quiescent State ...........................46
2.3 The Power System Statistical Characterisation............................... 47
2.4 PDF Verification .............................................................................50
2.5 Setting the Threshold for Alarm...................................................... 52
2.6 Simulated Results ............................................................................52
2.7 Validation of Method using MudpackScripts ................................. 54
2.8 Application to Real Data ................................................................. 56
2.8.1 Results of Real Data Analysis .................................................58
2.9 Discussion .......................................................................................66
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
11/189
Table of Contents
xi
2.10 Conclusion....................................................................................... 66
Chapter 3 ......................................................................................................... 69
3 Rapid Detection of Changes to Individual Modes in Multimodal Power
Systems ........................................................................................................... 69
3.1 Introduction..................................................................................... 69
3.2 The Stochastic Power System Model Revisited.............................. 70
3.3 Application of the Optimal Detection Strategy............................... 71
3.4 Individual Mode Detection Statistic Details ................................... 73
3.5 Statistical Characterisation of the Detection Statistic η .................. 74
3.6 Results ............................................................................................. 77
3.6.1 Simulated Results.................................................................... 78
3.7 Real Data Analysis .......................................................................... 82
3.8 Verification of Method.................................................................... 85
3.9 Real Data Analysis Results ............................................................. 90
3.10 Discussion ....................................................................................... 94
3.11 Conclusion....................................................................................... 95
Chapter 4 ......................................................................................................... 97
4 A Kalman Filtering Approach to Rapidly Detecting Modal Changes .... 97
4.1 Introduction..................................................................................... 97
4.2 Stochastic Power System Model..................................................... 98
4.3 The Kalman Application in Power System Analysis .................... 101
4.3.1 Kalman formulation .............................................................. 101
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
12/189
Table of Contents
xii
4.3.2 State space representation of the power system model ......... 103
4.3.3 Kalman Solution.................................................................... 105
4.3.4 Detection using the Innovation..............................................106
4.4 Simulated Data Results ................................................................. 108
4.4.1 Simulation Type 1- damping change..................................... 111
4.4.2 Simulation Type 2- frequency change................................... 112
4.4.3 Simulation Type 3- damping and frequency change............. 113
4.4.4 Statistics of results................................................................. 114
4.5 Verification of the Kalman Method ..............................................115
4.6 Application to Real Data ............................................................... 116
4.6.1 Part I: Analysis of the Melbourne Data................................. 117
4.6.2 Part II: Combining multi-site data for enhanced SNR and
detection. ………………………………………………………………122
4.7 Guidance in tuning the Kalman Filter ...........................................126
4.8 Discussion on real data analysis ....................................................127
4.9 Conclusion.....................................................................................128
Chapter 5 .......................................................................................................129
5 A new class of multi-linear functions for polynomial phase signal
analysis ..........................................................................................................129
5.1 Introduction ...................................................................................129
5.2 The new class of multi-linear functions ........................................ 132
5.3 Designing new GMFC members...................................................134
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
13/189
Table of Contents
xiii
5.3.1 Algorithm for estimating the parameters of 4th order PPSs
based on ( )31 3,T n Ω .............................................................................. 136
5.4 Derivation of the Asymptotic Mean Squared Errors..................... 138
5.5 Simulations.................................................................................... 145
5.6 Application in Power System Monitoring..................................... 150
5.6.1 Real Data Analysis and Results ............................................ 153
5.6.2 Discussion on Real Data Analysis ........................................ 159
5.7 Conclusion..................................................................................... 160
Chapter 6 ....................................................................................................... 161
6 Discussion ............................................................................................. 161
6.1 Comparison of Proposed Detectors............................................... 166
Chapter 7 ....................................................................................................... 175
7 Conclusions and Future Directions ....................................................... 175
7.1 Conclusion..................................................................................... 175
7.2 Future Directions........................................................................... 176
Publications ................................................................................................... 179
Bibliography.................................................................................................. 181
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
14/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
15/189
Table of Figures
xv
Table of Figures
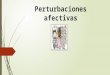
Figure 1-1 States associated with the eastern Australian largeinterconnected power system (shaded). State capital cities thatrepresent generation nodes and measurement site location andratings are shown..............................................................................31
Figure 2-1 Model for quasi-continuous modal disturbances in a powersystem...............................................................................................46
Figure 2-2 Equivalent model for quasi-continuous modal oscillations in a power system....................................................................................47
Figure 2-3 Energy PDF and Histogram Comparison (60 second window)...........................................................................................................52
Figure 2-4 60 second Data Window of Energy Measurements with 1%False Alarm Rate Shown..................................................................53
Figure 2-5 Mode Trajectory of QNI Case13 MudpackScript Data..........55
Figure 2-6 Output Energy vs 1, 5, 10% thresholds..................................55
Figure 2-7 Short Term Energy Detection Applied to Real Data, reddenotes past data used to formulate long term estimates. ................57
Figure 2-8 24 hours of recorded angle measurements (2nd
October 2004),sites as indicated...............................................................................59
Figure 2-9 Queensland Estimated Impulse Response..............................59
Figure 2-10 New South Wales Estimated Impulse Response..................60
Figure 2-11 Victorian Estimated Impulse Response................................60
Figure 2-12 South Australian Estimated Impulse Response....................61
Figure 2-13 Queensland PDF Estimate with white noise verificationhistogram..........................................................................................61
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
16/189
Table of Figures
xvi
Figure 2-14 New South Wales PDF Estimate with white noiseverification histogram. ..................................................................... 62
Figure 2-15 Victorian PDF Estimate with white noise verificationhistogram.......................................................................................... 62
Figure 2-16 South Australian PDF Estimate with white noise verificationhistogram.......................................................................................... 63
Figure 2-17 Queensland 60 second energy measurements vs variousFARs shown..................................................................................... 63
Figure 2-18 New South Wales 60 second energy measurements vsvarious FARs shown........................................................................ 64
Figure 2-19 Victorian 60 second energy measurements vs various FARsshown. .............................................................................................. 64
Figure 2-20 South Australian 60 second energy measurements vs variousFARs shown..................................................................................... 65
Figure 3-1 Previously introduced stochastic power system model.......... 70
Figure 3-2 Generation of the optimal detection statistic.......................... 72
Figure 3-3 Mode 1 test statistic vs alarm threshold. ................................ 80
Figure 3-4 Mode 2 test statistic vs alarm threshold. ................................ 81
Figure 3-5 Spectral plot of mode contributions within system frequencyresponse............................................................................................ 82
Figure 3-6 Short Term Modal Detection Applied to Real Data...............84
Figure 3-7 Case13 Modal Damping and Frequency Trajectory. .............85
Figure 3-8 Spectral Estimate of Site Magnitude Response. ....................86
Figure 3-9 Estimates of Individual Modal Spectral Contributions -Brisbane (QNI).................................................................................87
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
17/189
Table of Figures
xvii
Figure 3-10 Estimates of Individual Modal Spectral Contributions -Sydney (NSW). ................................................................................87
Figure 3-11 Estimates of Individual Modal Spectral Contributions -Adelaide (SA)...................................................................................88
Figure 3-12 Individual Mode Monitoring - Mode 1 Brisbane. ................88
Figure 3-13 Individual Mode Monitoring - Mode 1 Sydney. ..................89
Figure 3-14 Individual Mode Monitoring - Mode 1 Adelaide.................89
Figure 3-15 Brisbane Mode 1 Test Statistic vs Time (1% FAR).............91
Figure 3-16 Brisbane Mode 2 Test Statistic vs Time (1% FAR).............92
Figure 3-17 Sydney Mode 1 Test Statistic vs Time (1% FAR). ..............93
Figure 3-18 Sydney Mode 2 Test Statistic vs Time (1% FAR). ..............93
Figure 3-19 Magnitude spectrum of voltage angles at different sites at24:00hrs............................................................................................94
Figure 4-1 Equivalent model for the individual response of a power
system to load changes. ....................................................................99
Figure 4-2 General Kalman filter estimator. ............................................99
Figure 4-3 Innovation PSD of: a) the 60 second interval prior to thedamping change, and b) the 60 second interval subsequent to thedamping change. ............................................................................111
Figure 4-4 Innovation PSD of: a) the 60 second interval prior to thefrequency shift, and b) the 60 second interval subsequent to thefrequency shift................................................................................112
Figure 4-5 Innovation PSD of: a) the 60 second interval prior to thedamping change, and b) the 60 second interval subsequent to thedamping and frequency change......................................................113
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
18/189
Table of Figures
xviii
Figure 4-6 Analysis of Normalised Innovation prior to suddendeteriorating damping at 120mins. ................................................115
Figure 4-7 Analysis of normalised innovation in the 60 seconds after thedeteriorating damping at 121mins. ................................................116
Figure 4-8 Melbourne frequency response estimate from LTE at 165minutes........................................................................................... 118
Figure 4-9 Comparison of (a) system output and (b) normalisedinnovation. .....................................................................................120
Figure 4-10 (a) Innovation sequence γ(n), (b) Innovation PSD at 196-197mins................................................................................................121
Figure 4-11 (a) Innovation sequence γ(n), (b) Innovation PSD at 197-198mins................................................................................................121
Figure 4-12 (a) Innovation sequence γ(n), (b) Innovation PSD at 198-199mins................................................................................................122
Figure 4-13 Normalised (a) Individual innovation PSDs for Sydney,Melbourne and Adelaide (b) Combination PSD at 196-197 mins.The new threshold corresponding to a 99.9% FAR....................... 125
Figure 4-14 Normalised (a) Individual PSD at 198-199 mins (b)Combination PSD at 198-199 mins showing new threshold for CI of99.9% FAR. ...................................................................................125
Figure 5-1 a4 estimate MSE vs. SNR for the final and intermediate parameter estimates........................................................................ 147
Figure 5-2 a3 estimate MSE vs. SNR for the final and intermediate parameter estimates........................................................................ 148
Figure 5-3 a2 estimate MSE vs. SNR for the final and intermediate parameter estimates........................................................................ 148
Figure 5-4 a1 estimate MSE vs. SNR for the final and intermediate parameter estimates........................................................................ 149
Figure 5-5 a0 estimate MSE vs. SNR for the final parameter estimates.149
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
19/189
Table of Figures
xix
Figure 5-6 b0 estimate MSE vs. SNR for the final parameter estimates.........................................................................................................150
Figure 5-7 Measured Data, (a) Voltage Magnitude and (b) Phase. .......154
Figure 5-8 Reconstructed Signal ( ).r z t ...................................................155
Figure 5-9 Example of signal slice used for parameter estimation, down-sampled to 6.25Hz. Coloured signal shown is around the first phasedisturbance. ....................................................................................155
Figure 5-10 Second example of signal slice used for parameterestimation, down-sampled to 6.25Hz. Coloured signal shown isaround the second phase disturbance. ............................................156
Figure 5-11 b0 estimate. .........................................................................156
Figure 5-12 a0 estimate (phase deg).......................................................157
Figure 5-13 a1 estimate, 2ω π
= f . ............................................................157
Figure 5-14 a2 estimate (frequency rate), ω & . .........................................158
Figure 5-15 a3 estimate, ω && .....................................................................158
Figure 5-16 a4 estimate, ω &&& .....................................................................159
Figure 6-1 EBD outputs from three sites, NSW, VIC and SA...............169
Figure 6-2 OMID Mode 2 outputs from three sites, NSW, VIC and SA.........................................................................................................170
Figure 6-3 OMID Mode 1 outputs from three sites, NSW, VIC and SA.........................................................................................................171
Figure 6-4 Estimation of Spectral Mode Contributions from three sites, NSW, VIC and SA. ........................................................................172
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
20/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
21/189
List of Tables
xxi
List of Tables
Table 2-1 Relative Error of Moments ......................................................51
Table 2-2 Percentage of Alarms...............................................................54
Table 2-3 Percentage of False Alarms over initial 3 hours of Data.........65
Table 3-1 Qualitative Reference to Damping Performance (NEMMCO)*..........................................................................................................78
Table 3-2 Stationary Modal Parameters and Weights..............................79
Table 3-3 Damping Changes....................................................................80
Table 3-4 Alarms (1% FAR) ....................................................................81
Table 3-5 Long Term Modal Parameter Estimates ..................................85
Table 3-6 False Alarms (1% FAR) ..........................................................91
Table 4-1 Qualitative Reference to Damping Performance...................109
Table 4-2 Damping and Frequency Changes to Mode 1........................110
Table 4-3 Alarms (0.1% FAR)...............................................................114
Table 4-4 Damping and Frequency Long Term Estimates over 120-165mins................................................................................................118
Table 4-5 SNR Improvement through Combination of Site Analysis ...126
Table 5-1 Approximate Formulae for CRLBs ( )1 N >> [63].................139
Table 5-2 Parameter Values of 4th Order Polyphase Signal used inSimulations.....................................................................................146
Table 6-1 Comparison of detection method test statistics. ....................173
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
22/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
23/189
Acknowledgments
xxiii
Acknowledgements
The author wishes to thank the following for their support during the
period of this research. Firstly I’d like to extend a sincere thank you to
Associate Professor Peter O’Shea, for his guidance, encouragement, input
and patience during the period of this research. Dr O’Shea has all the
qualities any candidate could ever ask for from a supervisor, both in his
technical expertise and his persona, thanks Peter.
I would also like to extend a warm thank you to Professor Gerard
Ledwich (QUT) for his comments, guidance, input and insightful
understanding of the research topic.
Other people I’d like to mention and thank are Dr Ed Palmer (QUT) for
his contributions, support and friendship over many years and Dr Chaun-
Li Zhang (QUT) for his endless supply of data when I needed it. I would
also like to thank Maree Farquharson (QUT) who, as fellow candidates,
supported and encouraged each other over our respective research
periods.
In addition I would like to extend a grateful thank you to David Bones
(NEMMCO) and David Vowles (University of Adelaide) for giving me
permission to use the MudpackScripts as an important validation tool
within this thesis, very much appreciated.
Finally, I would like to thank the following for the much welcome
financial support over the course of the research; Queensland University
of Technology for the APAI and QUTPRA scholarships, the QUT
Chancellery for providing the Vice-Chancellor’s Award, the QUT Faculty
of Built Environment and Engineering for the BEE financial top-up and
finally my current employer, CEA Technologies Pty. Ltd, for providing
me the study leave I required in the final stages of completing this body
of work.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
24/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
25/189
Dedication
xxv
Dedication
There are a number of very special people I would like to dedicate this
work to; firstly my mother, Virginia Ann Bryan, who with her guidance,
support and never ending devotion has helped me mature into the man I
am today. I would also like to dedicate this work to my father, RogerWiltshire, for providing me the qualities that formulate a good engineer.
Also to my two boys, Peter and Jack, who I am eternally proud of and
encouraged by to strive to be a better father and person and finally to
three very special and lovely ladies, Catherine Louise Kowalski, Meg
Malaika (21/9/1966-19/3/2006) and Leslie Elizabeth Peters who in their
own extraordinary way have encouraged, inspired, taught and supported
me in my endeavours over the last few years.
Love to you all…
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
26/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
27/189
Glossary
xxvii
Glossary
AESOPS Analysis of Essentially Spontaneous Oscillations in Power Systems
AMSE Asymptotic Mean Squared Error
ARI Adelaide Research and Innovation
CI Confidence Interval
COA Centre of Area
CRLB Cramér-Rao Lower Bounds
CP Cubic Phase Function
dB Decibels
DFT Discrete Fourier Transform
DTFT Discrete Time Fourier Transform
EBD Energy Based Detection
FAR False Alarm Rate
FFT Fast Fourier Transform
GMFC Generalized Multi-linear Function Class
GPS Global Positioning System
HAF Higher–Order Ambiguity Function
HP Higher-Order Phase Function
Hz Hertz
IF Instantaneous Frequency
IFR Instantaneous Frequency Rate
IIR Infinite Impulse Response
KID Kalman Innovation Detector
LT Long Term
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
28/189
Glossary
xxviii
LTE Long Term Estimator
ML Maximum Likelihood
MSE Mean Squared Error
NEMMCO National Electricity Market Management Company Limited
NILS Non-linear Instantaneous Least Squares
NSW New South Wales
OIMD Optimal Individual Mode Detection
PDF Probability Density Function
PPM Polynomial Phase Method
PPS Polynomial Phase Signal
PSD Power Spectral Density
PWVD Polynomial Wigner-Ville Distributions
RMS (rms) Root Mean Squared
RV Random Variable
QLD Queensland
QP Quartic-Phase Function
QR Quadratic
QUT Queensland University of Technology, Brisbane, Australia
SA South Australia
SNR Signal to Noise Ratio
SVD Singular Value Decomposition
UA The University of Adelaide
VIC Victoria
W Watts
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
29/189
Chapter 1
29
Chapter 1
1 Introduction
1.1 The Analysis of Large Interconnected PowerSystems
The worldwide economic restructuring of the electrical utility industry
has formulated large interconnected distribution networks, resulting in a
greater emphasis on reliable and secure operations [17]. To ensure secure
and reliable operations, the large interconnected power systems require
ongoing wide-area observation and control. To meet these requirements
many wide-area monitoring methodologies have been proposed and
established [18-20]. One of the most well accepted approaches is to
monitor the power system at various locations within the distribution
network and to employ Global Positioning System (GPS) information to
synchronise the information acquired [21, 22]. With this approach, the
positioning of the measurement locations in the network is an important
issue which is discussed in [23].
Monitoring of power system stability is a critical issue for distributed
networks with a significant focus on the inter-area oscillations, whereby
this stability is largely dependent on all “inter-area oscillations” being
positively damped. The latter are oscillations that correspond to transient
power flows between clusters of generators or plants within a specific
area in the large interconnected power system [24]. Monitoring and
control of these oscillations is vitally important, and has proven far more
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
30/189
Chapter 1
30
difficult than monitoring and control of oscillations associated with a
single generator [24].
The inter-area oscillations (or modes) are damped sinusoids, at a given
frequency with a relevant damping factor. It is the “ring-down” time
associated with the damping factor that is of consequence in the transient
ability of the system to stabilise post disturbance. It is critical that the
transient time is short (and stable) to minimise power flows between the
generation clusters and minimise the associated stresses within the
generation/transmission infrastructure. As a consequence there has been
much work done in the area of damping factor estimation in large
distributed power systems. Previous estimation methods have employed
Eigen analysis [25-27] as well as Prony [28] analysis [29, 30]. For
accurate damping factor estimation, however, one typically requires large
amounts of data [12, 13]. Conventional damping factor estimation
techniques are therefore not suitable for rapidly detecting sudden modal
damping changes. This thesis addresses this shortcoming by presenting a
variety of new monitoring methods which are able to provide indications
of detrimental modal parameter change with short data records (typically
of the order of minutes).
1.2 The Monitoring of Australia's LargeInterconnected Power System.
In Australia, the power system associated with the eastern states is an
example of a large interconnected power system. The eastern Australian
distribution infrastructure contains a number of generation clusters andthere are inter-area modal oscillations which arise from the interaction of
these clusters. A generalised map of the cluster location in eastern
Australia is shown in Figure 1-1, with the capital cities representing the
generation nodes. Also listed in Figure 1-1 are the locations of the GPS
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
31/189
Chapter 1
31
monitoring sites as presented in [22]. Due to the importance of
monitoring inter-area oscillations, a number of partners have entered into
collaboration to effect the monitoring. These partners include QueenslandUniversity of Technology (QUT), and various transmission distributors as
listed in [22]. The wide-area GPS synchronised techniques outlined in
[22] and [23] have provided the real system data analysed in this thesis.
Queensland
Victoria
New South Wales
South Australia
Melbourne
SydneyAdelaide
Brisbane
275 kV
220 kV
330 kV
275 kVSouth PineBrisbane
Para Adelaide
RowvilleMelbourne
Sydney WestSydney
GPS Measurement Location& bus rating
City
275 kV
220 kV
330 kV
275 kVSouth PineBrisbane
Para Adelaide
RowvilleMelbourne
Sydney WestSydney
GPS Measurement Location& bus rating
City
Figure 1-1 States associated with the eastern Australian large interconnected power
system (shaded). State capital cities that represent generation nodes and
measurement site location and ratings are shown.
(Template image of Australia sourced from http://www.rrb.com.au/Images/Australia)
1.3 The use of Externally Sourced Simulated Datafor Algorithm Verification
The ultimate goal of power system monitoring algorithms is to perform
reliably in real power system scenarios. Before this can be achieved,
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
32/189
Chapter 1
32
however, the algorithms need to be tested via simulations. The simulation
environment allows conditions to be varied and consequent performance
to be evaluated in a controlled manner. For the simulation environment to provide useful testing, however, it must incorporate modelling which is
representative of real systems. Good modelling strategies help to verify
new techniques prior to real data implementation and provide confidence
in real data analysis results. The task of creating satisfactory models of
large dynamically interconnected systems is a challenging and non-trivial
task. Fortunately, for the purposes of this PhD research, the author was
given access to externally1 created simulation models and data, based on
the eastern Australian interconnected power system. The modelling of thesystem was performed by Adelaide Research & Innovation (ARI), a
group associated with The University of Adelaide (UA), Australia. The
formulation of the power system model and associated data was
commissioned and contracted by the National Electricity Market
Management Company Limited (NEMMCO) to provide benchmark
testing of modal estimation methods from various research centres. The
Centre of Energy and Resource Management within the School of
Engineering Systems at Queensland University of Technology was one of
the research centres that was benchmark tested in 2004 [31]. The
simulated data provided in [31] was referred to as the “ MudpackScripts”
by the University of Adelaide authors. It consisted of various non-
stationary data sets that were of interest in this thesis. The data set of most
interest for this thesis is MudpackScript “Case13” which contains large
detrimental step changes of damping. The details of the changes in the
MudpackScripts will be presented in Chapter 2 Section 2.7 where it is
first used for technique verification prior to real data analysis.
1 Externally in this context means not associated with Queensland University ofTechnology, Brisbane Australia.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
33/189
Chapter 1
33
1.4 Review of Existing Modal Estimation Methods
With power systems becoming increasingly large and interconnected, the
resulting advantages in efficiency have been offset somewhat by thedisadvantage of greater vulnerability to system instability. This latter
problem has made it very important to be able to perform reliable
detection of system disturbances from modal oscillation data records.
These data records can be associated with either a single isolated
disturbance or with continuous random disturbances. The power
industry’s chief concern is in the detection of exponentially growing
disturbance modes potentially present in the power system. If a growing
mode is detected then the power utilities must introduce some dampening
to counteract the mode. As a result, methods for fast, reliable and accurate
estimation of the modal parameters are very important.
1.4.1 Single Isolated Disturbance
The parameter estimation methods in this section of the literature review
focus on the power system’s response to a single isolated disturbance.
1.4.1.1 Eigenanalysis of Disturbance Modes
There are a number of well established methods that have been used for
the analysis of power systems. Many of these methods assume that the
intrinsically non-linear power system can be approximated as a linear
system for small perturbations from the steady state. Under this
assumption Kundur et. al . [32] showed that eigenvalue analysis
techniques could be quite effective. Conventionally, eigenanalysis of a
power system is carried out by explicitly forming the system matrix, then
using the standard QR algorithm to compute the eigenvalues of the matrix
[32]. Modal oscillation parameters were then obtained from the
eigenvalues. This basic method has proven to be generally reliable and
has been extensively used by power utilities worldwide. Unfortunately
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
34/189
Chapter 1
34
this method is unsuitable for large interconnected systems [26]. To enable
large system mode monitoring the basic Eigen methods above have
undergone various adaptations. Byerly et. al. [7] developed the best-known algorithm – AESOPS (Analysis of Essentially Spontaneous
Oscillations in Power Systems). The advantage of AESOPS is that it does
not require the explicit formation of the system state matrix [7]. The
shortfall of the AESOPS method is the inadequacy for analysing very
large interconnected systems.
Uchida and Nagao [25] made another development in eigenanalysis by
proposing the use of the “ S matrix method”. In this method, it is
assumed that the dynamics of power systems can be linearly
approximated with a set of differential equations of the form, Ax=& ,
where is the (vector) state of the system and A is the system matrix.
The S matrix method transforms the matrix, A , into the matrix,
1( )( )S A hI A hI −= + − , where I is the unit matrix and h is a positive real
number. It can be shown that the dominant eigenvalues of S are the same
as the dominant eigenvalues of A , but with an appropriate choice for h,
can be computed with better numerical precision and speed [25]. The
refined Lanczos process is also employed to make high-speed calculation
possible [25]. Despite the computational advantage of the “ S matrix
method” eigenanalysis has limited application for very large
interconnected power systems [33].
1.4.1.2 Spectral Analysis using Prony’s Method
The spectral analysis of modal parameters for power system disturbance
monitoring is another area of research which has received much attention.
In this approach power system disturbance data records are spectrally
analysed immediately after a fault or disturbance. One popular technique
used for the spectral analysis is Prony’s method, which originated in an
earlier century [28]. Its ability to be practically implemented, though, was
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
35/189
Chapter 1
35
delayed until the advent of the digital computer. Numerical conditioning
enhancements developed in 1982 by Kumaresan and Tufts [3] broadened
its applicability to modal estimation. C.E Grund et. al. [33] comparedProny analysis to eigenanalysis and stated that “ Prony analysis has an
important advantage over eigenanalysis techniques in that it does not
require the derivation of a medium-scale model ”. Additionally, it can also
be applied to field measurements for the derivation of control design
models [33]. Many papers have been written on the use of Prony analysis
for oscillation modal parameter estimation [34], [29] , [35], with each
providing its own insights.
It should be noted however that the above applications of Prony’s method
assume that the signal contains little noise. In practice methods based on
the Prony technique are only effective where the noise power is relatively
small. Trudnowski et. al. [30] alluded to this when they stated for Prony
analysis “…The accuracy of the mode estimates is limited by the noise
content always found in field measured signals…”.
The poor conditioning of Prony’s method exists because of an ill-
conditioned matrix inversion in the method. To improve the ill
conditioning, Kumaresan and Tufts [3] [4] proposed using a “Pseudo-
Inverse” matrix, incorporating Singular Value Decomposition (SVD).
This technique was further explored by Kumaresan and Tufts in [4] and
was an improvement of the backward linear prediction methods proposed
by Nuttall [36], which in turn were improvements of Prony’s original
method.
This process of applying a truncated SVD analysis effectively increases
the SNR in the data prior to obtaining the solution vector. In [3],
simulations show that this method gives much more accurate estimates of
the modal parameters than traditional Prony methods. In [2], Kumaresan
also provided further enhancement to Prony’s method with the
introduction of FIR pre-filtering to reduce the sensitivity of measurement
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
36/189
Chapter 1
36
errors in observed signal samples when determining the parameters of
sinusoidal signals.
Gomez Martin and Carrion Perez also introduced some extensions in
working with noisy data with the application of Prony’s method [6] by
using a moving window in both forward and backward directions. This
application of forward and backward methodologies were further
explored by Kannan and Kundu [37].
A time-varying Prony method for instantaneous frequency estimation
from low SNR data was introduced by Beex and Shan [38]. This was
pertinent since power systems do have substantially non-stationary
components on occasions.
1.4.1.3 The Sliding Window Derivation
Prony’s method is a parametric spectral analysis method. Some authors
have pursued solutions using classical spectral analysis based on Fourier
methods. For example; Poon and Lee [39] developed a technique to
determine the modal parameters by employing a Sliding Window Fourier
Transform. The frequency components of the modes were first identified
in the frequency spectrum. The damping constants could then be obtained
by comparing the spectral magnitudes of a given modal component in
different time windows. These Fourier techniques proved to be quite
robust to noise and worked well as long as the oscillation modes were
well separated and could be separately distinguished within the Fourier
spectral domain.
Basically the method developed by Poon and Lee uses the rate of decay
of the Fourier Transform as a rectangular window slides to determine thedamping factor of the mode. The results of this method provided good
correlation compared to conventional techniques. However the
fundamental limitation of the Poon and Lee method was the tight
restrictions on the length of the window that could be used.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
37/189
Chapter 1
37
It was subsequently shown that this restriction was needed to avoid errors
due to the interference from the superposition of the positive and negative
frequency components [9]. This interference was formulated by the largeside lobes of the spectral sinc function introduced by the rectangular
windowing. Hence, Poon and Lee specified that the window lengths only
have certain discrete values, at which the interference (zeros in the sinc
function) turned out to be zero. The problem was that the window length
was dependent upon the modal frequency, and hence this frequency had
to be accurately estimated prior to the windowing implementation.
Additionally, a different set of windows was required to process every
different mode present. O’Shea [8] extended Poon and Lee’s Fouriermethod and showed that a relaxation of the restriction on window lengths
could be achieved by applying a smooth tapering window (Kaiser
window) rather than a rectangular one [40], [9].
Although the sliding spectral window methods in [39] and [9] were robust
to noise, they only allowed analysis of multiple modes if the modes were
sufficiently well separated to be resolved with conventional Fourier
techniques. To deal with multiple closely spaced modes Poon and Lee
[41] developed a modified technique. For lightly damped closely spaced
low frequency oscillation modes exhibiting beat phenomenon they made
use of the imaginary part of the Fourier Transform of the swing curves.
Their simple dual modal case was modelled by:
1 2
1 1 2 2( ) cos(2 ) cos(2 )t t f t a f t e a f t eσ σ π π − −= +
(1.1)
and 1 f and 2 f were assumed to be close in frequency and unable to be
resolved using Fourier techniques.
Although not specifically stated by Poon and Lee, a major problem with
their method was that it was not straightforward to determine either 1 f or
2 f . It was therefore not straightforward to determine the damping factors.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
38/189
Chapter 1
38
O’Shea [42] showed that a simpler and more reliable method of
determining modal parameters for closely spaced modes was to extend
the earlier Sliding Window method in [9] by calculating the spectrum inmore than two windows. Using the results from the multiple spectral
windows, a set of simultaneous equations in the desired parameters could
be created. These parameters were the complex amplitudes, frequencies
and damping factors of the modes. These simultaneous equations could
then be solved in a least squares sense [4] to obtain estimates for the
modal parameters. The presented simulations indicated good results.
1.4.2 Continuous Random Disturbances
The methods for modal analysis so far discussed all assumed that the data
record could be well modelled as a sum of complex exponential modes.
This is an acceptable model if the record has been obtained after a single
isolated disturbance. However this is not acceptable for a record obtained
from continuous random disturbances (which is the scenario for power
systems in normal operation [11]). The following sections investigate
modal parameter analysis in relation to continuous random disturbances.
1.4.2.1 Autocorrelation Methods
The estimation of modal parameters from data records corresponding to
continuous random disturbances was discussed by Ledwich and Palmer in
[11]. They reasoned that the continuous random disturbances exciting a
power system in normal operation should be fractal in nature, having a 1/ f
shaped spectrum [11], i.e. it should be equivalent to integrated white
noise. They also reasoned that a power system could be approximated as
an IIR filter. With these assumptions about the excitation and power
system, Ledwich and Palmer showed that if one differentiated the output
of the power system, the result would be equivalent to the output of an
IIR filter driven by white noise. Since the autocorrelation function of a
system driven by white noise reveals the impulse response of that system
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
39/189
Chapter 1
39
[43], then the autocorrelation function of the differentiated power system
disturbance output should be the impulse response of the power system,
i.e. it will have the form of a sum of complex exponentials. The modal parameters can then be determined using Prony analysis [11].
Autocorrelation techniques were further examined by Banejad and
Ledwich [12] to determine resonant frequencies and mode shape by
modelling disturbances using white noise to represent customer load
variations and an impulse to represent a disturbance. The simulation
results provided tangible relationships to a known system’s eigenvalue,
resonant frequencies and mode shape, but did not make any reference to
the limitations of mode spacing.
1.4.2.2 Review of Kalman Filter Innovation Strategies
In the 1950s, increased control requirements for advancing avionics led to
the formulation of what is now commonly known as the Kalman filter.
Although earlier radar tracking work by Swerling had formulated very
similar algorithms [44] the more highly recognised publications by
Kalman [45], [46] then Kalman and Bucy [47] were generally recognised
as the origins of the Kalman filter. Since that time the Kalman filter has
been recognised as a very important (and optimal) linear estimator; it has
been used extensively in a multitude of areas that encompass stochastic
models, state and parameter estimation and control requirements. There
have also been a multitude of Kalman filter variations for non-linear
systems, such as the extended Kalman filter [48] and unscented Kalman
filter [49]. In this thesis, the focus of interest is on the Kalman filter
innovation. The innovation is defined as the difference between the
measured output and the estimated output [50]. It is well known that the
innovation from a Kalman filter is spectrally white as long as the assumed
model parameters are valid [50, 51]. However under faulty or changed
conditions the innovation sequence will demonstrate large systematic
trends as the model will no longer represent the physical system [50].
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
40/189
Chapter 1
40
Various Kalman filter innovation approaches, that target fault detection,
diagnosis of dynamic systems and least squares estimation, are presented
in [50-55]. In this thesis the Kalman filter model is used to estimate thesystem output. By monitoring the whiteness of the innovation one can
detect if there are any sudden detrimental changes in the model
parameters [50], otherwise the innovation sequence is equivalent to the
original excitation under normal plant conditions [51].
1.5 Review of Frequency Estimation Methods
Although modal damping estimates are of critical importance, the
frequency of the modes also provides an opportunity to determine
changes in system behaviour and dynamics. In the case of large
interconnected power systems, if a particular major site disconnects from
a national grid (example South Australia disconnects from the Australian
Eastern network) then the resulting power system will undergo a dynamic
shift in an attempt to re-establish an equilibrium state. In doing so it is
expected that the frequencies of the remaining modes will also change.
Therefore to rapidly detect and estimate the changes in modal frequencies
is of critical importance.
The nature of the frequency changes that occur in a power system over
time will not be known precisely. To allow for the arbitrary nature of the
frequency trajectories, polynomial modelling will be used. Note that if the
frequency trajectory is a polynomial as a function of time, then the phase
trajectory will also be polynomial. It will be assumed that the
component/mode in question is given by:
( ) ( )0( ) , j nr w z n b e z nφ = + (1.2)
where b0 is the amplitude, the polynomial phase coefficients are given by
{ }0 1, , , P a a aK and the phase is:
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
41/189
Chapter 1
41
0
( ) P
p p
p
n a nφ =
= ∑ (1.3)
and ( )w z n is complex white Gaussian noise.
1.5.1 Polynomial-Phase Estimation Methods
To determine the frequency/phase trajectory of a component/mode
conforming to the model in (1.2) it is necessary to determine the
polynomial phase coefficients. An obvious solution to the problem of
obtaining estimates of these parameters is to use the direct Maximum
Likelihood (ML) method. However as discussed in [56] the
implementation of this method is very computationally intensive,
requiring a P -dimensional search. To overcome the computationally
restrictive implementation of the ML method, various authors have
introduced alternative strategies [57], [58], [59], [60] and [61].
Fundamentally these strategies employ multi-linear transforms that
reduce the search requirements from a P -dimensional search to a far more
computationally efficient P -one-dimensional search.
More recently O’Shea introduced a “time-frequency rate” representation
which is defined in equation (1.4) [16]:
( )( )
( )2
1 / 2
0
( , ) .r
N j m
z r r m
CP n z n m z n m e−
− Ω
=Ω = + −∑
(1.4)
This representation reveals the rate of change of frequency of a signal as a
function of time. This has some relevance to the power system scenario
where frequency changes are of particular interest. If n is set equal to 0 in
equation (1.4) the Cubic Phase (CP) function is obtained. This function
has been demonstrated to be very effective in the estimation of
Polynomial Phase Signals (PPS) up to orders of 3 P = . The
computationally efficient implementation of the CP was procedurally
outlined by O’Shea in [62]. This fast algorithm was shown to produce
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
42/189
Chapter 1
42
predictable estimate Mean Squared Errors (MSE) in close proximity to
relevant Cramér-Rao Lower Bounds (CRLBs), above a given Signal to
Noise Ratio (SNR) threshold. The relevant CRLBs associated with thePolynomial Phase Coefficients for a given order PPS are outlined in [63].
Generalised higher order (HP) phase functions were also introduced by
O’Shea in [62]. The HP function formed a multi-linear extension to the
CP function, specifically for the purposes of parameter estimation of PPS
of order greater than three. The definition of this function is shown below
in (1.5),
( )
2
( , ) , ,r r
P P j m
z z m
HP n K n m e− ΩΩ =∑ (1.5)
where ( ) ( ) ( )1,i
i i
r
r k k P I
z i r i r i K n m z n c m z n c m∗
= = Π + −
is the kernel and [ ]
. ir ∗
indicates conjugation of [ ]. iff 1ir = .
The parameters , ,i ic k , andir I are selected to ensure unbiased parameter
estimates for a phase polynomial of order P . The choice of these
parameters was conducted in a comparable manner to procedures outlined
in [61] and [59], to ensure unbiased phase coefficient estimates.
Further work on the HP function was explored by Farquharson et. al. in
[56]. New HP functions were devised that allowed parameters to be
determined in isolation [56]. It was noted in [56] that the new HP
functions had some similarities to functions introduced in [60], but they
also had some notable differences. In particular the new HP function
based estimates in [56] had much lower SNR thresholds and were
therefore much more practically applicable.
1.6 Conclusion
Despite the advances of the last decades for modal parameter estimation
techniques, there is a common recognition by many authors that no
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
43/189
Chapter 1
43
individual technique accounts for all the various situations that arise in
practice. Each tool has its own merits and applications, and provides a
different view into dynamic system behaviour. With technologicaladvances constantly changing the face of power systems, the need to
continually improve oscillation modal estimation algorithms has been
widely accepted as being very important. Reliable detection of sudden
detrimental changes in modal oscillations is also extremely important so
that catastrophic failures can be avoided. Relatively little work has been
done to date on optimal procedures for such detection.
In relation to frequency and frequency rate estimates methods outlined
earlier, it is important to keep in mind the desire of the power industry to
obtain estimates as quickly as possible with an acceptable level of error.
In the situation of angle measurements from sites around a national power
system, it is generally recognised that these recorded measurements have
a reasonable SNR. These SNRs should be adequate for the PPS modelling
approaches considered in this thesis for estimating/detecting changes in
post-separation modal frequencies.
Therefore the major focus of this thesis will be the rapid acquisition of
system information (both modal damping and modal frequency) under the
scenario of sudden detrimental change to a quasi-stationary large
interconnected power system.
1.7 Organisation of the remainder of the thesis
The remainder of the thesis is organised as follows. Chapter 2 introduces
a unique energy based method that is primarily focused on the rapid
detection of deteriorating modal damping in power systems. In Chapter 3
the technique in Chapter 2 is further extended and optimised for
monitoring of individual modal damping changes in multi-modal power
systems. Chapter 4 will then introduce another prospect of modal
parameter monitoring which is based around the Kalman filter innovation
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
44/189
Chapter 1
44
spectrum. Chapter 5 will introduce a new class of multi-linear functions
for polynomial phase signal analysis and examine implementation
opportunities in power system monitoring. Chapter 6 will be devoted to ageneral discussion and Chapter 7 will present conclusions and future
directions.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
45/189
Chapter 2
45
Chapter 2
2 Rapid Detection of Deteriorating ModalDamping
2.1 Introduction
In this chapter a new method is introduced that deals with the problem of
detecting sudden changes in the damping of inter-area modes in large
interconnected power systems. The motivation for focus on rapid
detection, rather than the more traditional modal parameter estimation, is
drawn from the verity that standard modal parameter estimation methods
require long data records to yield accurate estimates – typically an hour or
more of data is needed. This is too long to wait if there is a sudden andseriously problematical change of damping.
While accurate estimation of the modes requires long time scales,
detection of sudden deterioration from a known quiescent point can be
done in much shorter time scales (typically a minute). The “sudden
change” can be detected very easily via a sudden change in the energy of
the system modes. However to be able to make an informed decision on
whether a change has actually occurred a statistical characterisation of the
quiescent system energy must be established. Once the statistical
characterisation has been formulated the thresholds for rapid detection of
modal deterioration may be set that can provide an alarm benchmark with
a defined confidence level.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
46/189
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
47/189
Chapter 2
47
ideally obtained according to the procedure in [23]. This procedure
maximises the lightly damped inter-area mode information and minimises
the effect of the more heavily damped local modes (that are less critical inregards to overall supply stability and control).
Power System Filter
h(n)Integrator
white noise,
w(n)γ(n)
Differentiate
y(n)
Power System Filter h(n)
white noise
w(n) y(n)
output
x(n)Power System Filter
h(n)Integrator
white noise,
w(n)γ(n)
Differentiate
y(n)
Power System Filter h(n)
white noise
w(n) y(n)
output
x(n)
Figure 2-2 Equivalent model for quasi-continuous modal oscillations in a power
system.
With the power system model established, a statistical characterisation of
the system energy will be formulated in the following section.
2.3 The Power System Statistical Characterisation
The rationale behind the method proposed in this chapter is that the
energy of the output, y(n), will remain stable unless either the power
system filter transfer function or the excitation noise level changes
suddenly. If the power system transfer function changes such that there is
less damping of the excitation noise, then the result is more energy within
the output signal. Alternatively if there is a sudden (and sustained)
increase in excitation energy there could be a fault. In either case an
alarm should be created so that appropriate investigation/control can be
implemented.
This section will apply the knowledge of the power system model
established in [11] to generate a statistical system characterisation. A
formula is derived for a probability density function (PDF) of the energy
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
48/189
Chapter 2
48
y(n) under quasi-stationary operating conditions. The statistical
characterisation of the energy y(n) enables a reliable threshold to be set so
alarms can be raised if the energy deviates too much from these quasi-stationary operating conditions. These operating conditions can be
determined by the types of techniques described in [11]. As the detection
condition is for large detrimental change then the False Alarm Rate
(FAR) for detection is usually set fairly low (1% or lower). Such a low
FAR facilitates the minimisation of unwanted false alarms. Once an alarm
has been triggered, further monitoring of the system energy is necessary.
Sequential data windows are collected and a statistical analysis with
respect to the PDF is undertaken. Repeated alarms due to consistentlyhigh energy readings would induce corrective action by the power system
utility.
To develop the PDF for the energy in y(n) we return to the model in
Figure 2-2. It follows from Figure 2-2 that the output signal’s discrete
Fourier transform is:
( ) ( ) ( ),Y k H k W k = (2.1)
where H(k) is the discrete Fourier transform (DFT) of h(n), W(k) is the
DFT of w(n) and Y(k) is the DFT of y(n). Now, according to Parseval’s
theorem, the energy of y(n) can be determined from the samples in either
the time domain or the frequency domain. Because the samples are
independent in the frequency domain, though, this domain is most
conducive to developing a statistical characterisation. Note also, that for
real signals, all the information in the frequency domain is contained in
the positive half of the spectrum – the information in the negative half is
just a copy of that contained in the positive half. Using Parseval’s
theorem and the fact that half the energy is contained in the positive half
of the spectrum for real signals, total energy of y(n) is:
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
49/189
Chapter 2
49
}|)0(||)0(|2
1|)(||)({|
2 222/
1
22W H k W k H
N E
N
k
∑=
+= (2.2)
Note that ( )W k is a complex Random Variable (RV) with real and
imaginary parts:
( ) ( ){ } ( ){ }2 2 2
Re ImW k W k W k = + (2.3)
Now if the variance of w(n) is 2σ , then the left hand side of (2.3) is a chi-
squared RV with two degrees of freedom and variance, N
2σ [15].
Therefore the PDF at any discrete ensemble frequency ik is:
( ){ } 22 2 , xN
i
N f W k e σ
σ
−
= (2.4)
where x is the random variable power.
Using (2.1) and (2.4) the PDF of ( )ik Y can be deduced to be:
( )
( )
( )2 2
2 2
2 2
1
( ) ( )
.
i
i
y k w
i i
N
H k x
i
x f Y f
H k H k
N e
H k
σ
σ
−
=
=
(2.5)
From (2.2) it is evident that the energy is obtained by summing / 2 1 N +
RVs and then scaling by 2/N . Furthermore these RVs have PDFs given by
(2.5). The PDF of the sum is obtained by convolving the PDFs of all the
RVs being summed. That is, the PDF of this sum is:
( ) ( ) ( ) ( )/ 2 / 2 1 0/ 2 / 2 1 0 N N y y N y N y
f x f x f x f x− −= ∗ ∗ ∗L (2.6)
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
50/189
Chapter 2
50
( ) ( )
( ) ( )
( ) ( )
2 212
2 2
2 2
2 012
2 1
2
2 / 2
0
1 ,
/ 2
xN H
xN H
xN H N
H e
N H e
H N e
σ
σ
σ σ
− −
− −
− −
− −
− −
− −
= ∗
∗ ∗ L
(2.7)
where * denotes convolution.
Finally the PDF of the energy is obtained from the sum by scaling by 2/N .
The final energy PDF must therefore have its axes re-scaled accordingly.
From the PDF the threshold for detection of change can be formulated.
Establishing say the 1% false alarm rate is obtained via the cumulative
summation of the PDF area until the 99% point is determined.
2.4 PDF Verification
To verify the theoretically determined system output PDF, a comparison
of a theoretical PDF and simulated histogram was undertaken. Using
known modal parameters, simulations created a collection database of
outputs that were formulated into a histogram. A theoretical PDF was
then formulated and compared directly to the histogram.
The procedure for verification involved 10,000 simulation runs of random
noise, ( )~ 0,1 N , feeding a known modal system, depicted in Figure 2-2
and defined below:
( ) ( ) ( )1 2 ,h n h n h n= + (2.8)
where
( ) ( )sin 1,2ini i i ih n A e n iσ ω φ −= + = (2.9)
with modal parameters:
11 1 1 11.7 / , 0.4 , 1, 0r s s Aω σ φ
−= = − = = o
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
51/189
Chapter 2
51
12 2 2 22.7 / , 0.52 , 1, 0r s s Aω σ φ
−= = − = = o
Energy measurements were based on a 20, 40 and 60 second data window
with a sampling rate of 5Hz. Statistical characteristics of the simulated
histogram and of the theoretical PDF were calculated and compared. The
statistical characteristics examined were the first three central moments,
mean, variance and skewness [64]. The percentage errors between the
theoretical and simulated PDFs are shown in Table 2-1. The errors are all
comparatively low, inspiring confidence in the fact that the derived PDF
is correct.
TABLE 2-1 R ELATIVE ERROR OF MOMENTS
TIME WINDOW 20SEC 40SEC 60SEC
NOISE VARIANCE 1.0 1.0 1.0
MEAN 0.04% 0.43% 1.67%
VARIANCE 0.82% 1.65% 0.24%%
ERROR
SKEWNESS[64] 2.59% 5.76% 6.53%
Further validation of the theoretical PDF is provided by a visual
comparison with a histogram. The result from a 60sec analysis window is
shown in Figure 2-3. There is a close visual alignment.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
52/189
Chapter 2
52
5 10 15 20 25
0
10
20
30
40
50
60
70
80
Output half energy hisogram vs PDF
Energy-Joules
Output Energy Histogram vs PDF
5 10 15 20 25
0
10
20
30
40
50
60
70
80
Output half energy hisogram vs PDF
Energy-Joules
Output Energy Histogram vs PDF
Figure 2-3 Energy PDF and Histogram Comparison (60 second window).
2.5 Setting the Threshold for Alarm
From the PDF the threshold for detection of change can be formulated.
Establishing say the 10% false alarm rate is via the cumulative
summation of the PDF area until the 90% point is determined.
2.6 Simulated Results
It will be seen in this section that the simulations for detecting change
provided good results. The modal values were initially set to:
Mode 1: ( )0.4 sin 2t e t − 1 0.4σ ∴ = − 1& 2.0 /r sω =
Mode 2: ( )0.52 sin 2.7t e t − 2 0.52σ ∴ = − 2& 2.7 /r sω =
In the 300 minutes of simulated data, mode 1 underwent two damping
changes; a step deterioration to 1 0.1σ = − damping at 100 mins and
another step change to 1 0.2σ = − damping at 200 mins. The variance of
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
53/189
Chapter 2
53
the driving noise, w(n), was set to unity. The output, y(n), was generated
as per the model shown in Figure 2-2. Energy measurements for the
output were then taken over 1 minute block periods. The first 100 minutesrepresent the quasi-stationary system prior to the damping changes.
The graphical results and relevant statistics are shown in Figure 2-4 and
Table 2-2 respectively. The results are as one would expect – a low alarm
rate for the quiescent conditions, a high alarm rate during the major
damping change, and a lesser alarm rate during the period when the
damping “corrects itself” somewhat.
0 50 100 150 200 250 3000
10
20
30
40
50
60
70
Half Output Energy vs Time
Time-Minutes
E n e r g y - J o u l e s
Energy
1% FAR
Output Energy vs Time
0 50 100 150 200 250 3000
10
20
30
40
50
60
70
Half Output Energy vs Time
Time-Minutes
E n e r g y - J o u l e s
Energy
1% FAR
Output Energy vs Time
Figure 2-4 60 second Data Window of Energy Measurements with 1% False Alarm
Rate Shown.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
54/189
Chapter 2
54
TABLE 2-2 PERCENTAGE OF ALARMS
FALSE ALARM R ATE SET AT 1%
0-100 MIN NO CHANGE
11 4.0
−−= sσ
100-200 MIN
STEP CHANGE 1
1 1.0 −−= sσ
200-300 MIN STEP CHANGE
11 2.0
−−= sσ
% OF TIMEALARM O N
0.0% 80.0% 32.0%
2.7 Validation of Method using MudpackScripts
In this section the energy based method is verified using the Case13
MudpackScript data.
This data set is useful as it contains an initial 2 hour section that may be
regarded as representing the power system in a quasi-stationary state with
acceptable damping. It is this initial 2 hour section that is analysed by the
LTE to generate the required system PDF. From this the desired threshold
can be set. This data set used for verification represents the Queensland
(QNI) mode of the power system. Within this QNI data, the damping
suddenly deteriorates from an acceptable -0.25 to a very
undesirable 0.05− . The trajectory of the damping factor associated with
the Case13 script can be seen in Figure 2-5.
The detection results from the analysis of the first 12 hours of data can be
seen in Figure 2-6. The analysis window used is a block window set to 60
seconds at a 5Hz sampling rate. Comparison of Figure 2-5 and Figure 2-6
shows that the energy experiences sudden jumps when the damping
experiences sudden jumps, as one would hope. Various different alarm
thresholds are shown in Figure 2-6; for the data under analysis it is seen
that if one uses a 1% false alarm rate, one only gets alarms when there are
genuine damping changes.
In the following section, the energy detection technique will be applied to
real multi-site data obtained from wide area monitoring sites.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
55/189
Chapter 2
55
2 4 6 8 10 12
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
Time-hrs
D a m p i n g
MudpackScript Case13 QNI Damping Trajectory
Figure 2-5 Mode Trajectory of QNI Case13 MudpackScript Data.
0 2 4 6 8 10 120
1
2
3
4
5
6
7
x 10-3 Output Energy vs Time
Time-hrs
E n e r g y - J o u l e s
Energy
10% FAR
5% FAR
1% FAR
Figure 2-6 Output Energy vs 1, 5, 10% thresholds.
8/18/2019 Analisis de Perturbaciones en Sistemas Interconectados de Potencia
56/189
Chapter 2
56
2.8 Application to Real Data
To apply the energy detection method to a real data situation a long term
estimator is required to provide an estimation of the quiescent modalvalues. Initially the long term estimator establishes estimates for the
system transfer function. From this an estimated impulse response can be
determined. With this knowledge an approximation of the variance of the
excitation signal, w(n) in Figure 2-1, can be estimated. Once the system
transfer function, h(n), and the excitation variance, 2σ , have been
estimated then the expected energy PDF can be formulated. It is this
formulated PDF that enables a threshold to be set (given a suitable false
alarm rate). Note that the long-term estimate is periodically updated, and
the threshold is changed, based on the updated estimate.
The process for simultaneously performing the long-term estimation,
generating the energy estimate, thresholding and alarming is depicted
diagrammatically in Figure 2-7. As shown in Figure 2-7, the first task is