Embed Size (px)
Citation preview

ANALIZA PORÓWNAWCZA WYNIKÓW ZASTOSOWANIA PROCESÓW MARKOWA I
SEMIMARKOWSKICH, JAKO MODELI NIEZAWODNOŚCIOWYCH, WIELOSTANO-
WYCH OBIEKTÓW TECHNICZNYCH
Jacek Rudnicki
Politechnika Gdańska
Ul. Narutowicza 11/12, 80-233 Gdańsk, Polska
Tel.: +48 58 3472773, fax: +48 58 3472430
e-mail: [email protected]
Abstrakt
W czasie racjonalnej eksploatacji obiektów i systemów technicznych, podejmowane są różnorakie decyzje eksplo-
atacyjne a sam proces decyzyjny powinien polegać na wyborze tej, spośród możliwych do podjęcia, która uznana zostanie
za najlepszą. Wybór takiej decyzji, możliwy jest po uwzględnieniu szeregu różnych informacji, lecz nigdy nie będzie wybo-
rem do końca prawidłowym bez uwzględnienia danych i wskaźników dotyczących niezawodności.
W przypadku ustalenia probabilistycznego prawa powstawania uszkodzeń, wartości wskaźników niezawodności
można oszacowywać korzystając z matematycznych modeli niezawodnościowych. W czasie eksploatacji wielu urządzeń i
systemów technicznych (np. okrętowych układów napędu głównego) wielokrotnie zaobserwowano fakt, że czas poprawnej
pracy tych obiektów technicznych nie jest jednoznaczną miarą ich zużycia. Wobec tego do opisu ich gotowości i niezawod-
ności mogą być zastosowane modele zmian ich stanów niezawodnościowych w postaci procesów semimarkowskich, mode-
le, u podstaw których leży założenie wielostanowości obiektów technicznych.
W referacie przedstawiono analizę porównawczą wyników symulacyjnych badań niezawodnościowych, hipotetycznego
obiektu technicznego uzyskanych z zastosowaniem modeli niezawodnościowych w formie procesów Markowa oraz odpo-
wiadających im procesów semimarkowskich, nazywanych również „półmarkowskimi”. Keywords: niezawodność, procesy Markowa, procesy semimarkowskie, wielostanowe obiekty techniczne
1. Wstęp
W czasie eksploatacji wielu urządzeń mechanicznych (w tym również urządzeń siłowni okręto-
wych) wielokrotnie potwierdzony został fakt, że czas poprawnej pracy tych obiektów technicznych
nie jest jednoznaczną miarą ich zużycia [ 6], [ 7], [ 9], [ 10].
Można zatem, przyjąć za prawdziwą następującą hipotezę „proces eksploatacji rozpatrywanego
obiektu technicznego, zachodzący w racjonalnym systemie eksploatacji jest procesem, którego stan
rozpatrywany w dowolnej chwili tn (n = 0, 1, ..., m; t0 < t1 < ... < tm) zależy od stanu bezpośrednio
go poprzedzającego i nie zależy stochastycznie od stanów, które zaszły wcześniej i przedziałów czasu
ich trwania”. Hipoteza ta tłumaczy fakt obserwowany w praktyce polegający na wystarczająco traf-
nym dla potrzeb praktycznych prognozowaniu czasu poprawnej pracy urządzeń jedynie przy znajo-
mości ich aktualnego stanu technicznego i warunków realizacji zadań oraz zasobów materiałowo-
energetycznych.
Podejmowanie decyzji eksploatacyjnych odbywa się zatem w sytuacji, w której istnieje koniecz-
ność wprowadzenia przynajmniej jednego z parametrów modelu decyzyjnego jako zmiennej loso-
wej. Odzwierciedla to pełniej rzeczywistość eksploatacyjną, chociaż prowadzi wyłącznie do wnio-
sków mniej lub bardziej prawdopodobnych, co wynika z faktu, że poszczególnym wartościom
zmiennych decyzyjnych nie jest przyporządkowana jedna wartość funkcji odgrywającej rolę kryte-
rium, lecz wiele wartości występujących z różnymi prawdopodobieństwami.

Do często stosowanych w praktyce, decyzyjnych modeli probabilistycznych należą te, w których
przy wyborze optymalnej wartości zmiennej decyzyjnej kierujemy się wartością oczekiwaną konse-
kwencji jej podjęcia [3, 8 ].
Z formalnego punktu widzenia procedurę decyzyjną wygodnie w tej sytuacji przedstawić w jed-
nej z najczęściej spotykanych strukturalnych postaci: drzewa lub tablicy decyzyjnej.
W ogólnym przypadku drzewo decyzyjne przedstawia się jak na rys. 1
Funkcją kryterium dla przedstawionego drzewa jest maksymalizacja wartości oczekiwanej kon-
sekwencji c(dj, si), którą dla poszczególnych węzłów drzewa symbolizujących podjęcie wybranej
decyzji dj można określić następująco [ 1]:
k
i
ijjij njkisdcdspdcE1
,...,2,1,...,2,1,/)/( (1)
Należy przy tym zauważyć, iż pomimo pojawienia się prawdopodobieństw wystąpienia stanu si
(i = 1,2, …, k) pod warunkiem podjęcia decyzji dj (i = 1,2, …, n) sytuacja decyzyjna jest determini-
styczna, gdyż polega na wyborze jednej spośród n możliwych decyzji.
Rys. 1 Ogólny przypadek drzewa decyzyjnego. n – liczba rozpatrywanych decyzji, p(si)/dj – prawdopodobieństwo warun-
kowe wystąpienia stanu si w przypadku podjęcia decyzji dj, c(dj, si) – konsekwencje wystąpienia stanu si w przypadku pod-
jęcia decyzji dj
Zastosowanie przedstawionej na rys. 1 procedury decyzyjnej w procesie eksploatacji oprócz okre-
ślenia repertuaru możliwych do podjęcia decyzji wymaga dysponowania wiedzą umożliwiającą:

a) specyfikację wyróżnionych stanów (klas stanów) procesu,
b) wyznaczenie wartości prawdopodobieństw warunkowych – p(si)/dj,
c) oszacowanie konsekwencji - c(dj, si).
Pomijając w niniejszym opracowaniu punkty a) i c) stanowiące odrębne i obszerne zagadnienia,
podjęcie najprostszej decyzji eksploatacyjnej wymaga określenia prawdopodobieństw zaistnienia
określonych, wyróżnionych klas stanów procesu eksploatacji. Mając na uwadze wspomnianą wcze-
śniej hipotezę można, do wyznaczenia ich wartości zastosować modele niezawodnościowe w postaci
procesów Markowa i semimarkowskich.
2. Modele niezawodnościowo - funkcjonalne obiektów technicznych
Wykorzystanie teorii procesów stochastycznych umożliwia zrezygnowanie z założenia dwusta-
nowości procesu zmian stanów technicznych i podziału przestrzeni S możliwych stanów na przeli-
czalną i skończoną ilość podprzestrzeni, różnie odległych od krańcowego zbioru stanów obiektu
nowego[39]. Podstawowym założeniem przy tworzeniu modeli niezawodnościowo - funkcjonalnych
jest więc wielostanowość obiektu. Pociąga to za sobą możliwość wydzielenia w wyróżnionym zbio-
rze szeregu stanów o różnym stopniu zdatności, oraz szeregu stanów niezdatności oraz (w przeci-
wieństwie do większości modeli klasycznych) umożliwia wkomponowanie w model ważnej cechy
charakteryzującej maszyny i urządzenia mechaniczne - odnawialności. W złożonych obiektów tech-
nicznych jest to szczególnie ważne, gdyż będąc obiektami o wysokim stopniu skomplikowania i zło-
żoności, mogą uszkadzać się na wiele sposobów, z różnym prawdopodobieństwem i z różnymi kon-
sekwencjami dla realizowanych zadań.
W ujęciu funkcjonalnym proces eksploatacji jest procesem jednoczesnych zmian stanów tech-
nicznych i stanów eksploatacyjnych, które będąc wzajemnie zależne zachodzą równocześnie w fazie
eksploatacji [6].
Modelem procesu zmian stanu technicznego, zasadniczego z punktu widzenia niezawodności i
trwałości, są w tym przypadku procesy stochastyczne o dyskretnym zbiorze wyróżnionych stanów i
ciągłym czasie trwania. Elementy zbioru wyróżnionych stanów technicznych S={si; i=1, 2, 3, ..., I}
są wartościami procesu {W(t): t > 0}, który stanowią kolejno po sobie następujące stany siS, pozo-
stające między sobą w związku przyczynowym [6, 7].
W badaniach niezawodności złożonych obiektów technicznych szersze zastosowanie znalazła
jak dotąd przede wszystkim teoria stochastycznych procesów semimarkowskich oraz w szczegól-
nych przypadkach teoria procesów Markowa.
3. Założenia prowadzonej analizy
W celu przeprowadzenia analizy porównawczej przyjęto następujące założenia:
Badaniom symulacyjnym poddany zostanie hipotetyczny obiekt prosty w sensie nieza-
wodnościowym.
Realizacje zmiennych losowych opisujących czas przebywania w wyróżnionych stanach
wygenerowane zostaną z zastosowaniem generatora liczb pseudolosowych, po czym do-
konana zostanie estymacja punktowa parametrów teoretycznych zmiennych losowych
branych pod uwagę.
Dopuszczalność zastosowania wybranych rozkładów teoretycznych zostanie zweryfiko-

wana poprzez procedurę testowania hipotez nieparametrycznych z wykorzystaniem testu
2.
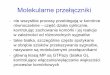
Model niezawodnościowy obiektu opracowany z zastosowaniem procesów semimarkow-
skich (proces {W(t): t 0}) można przedstawić za pomocą grafu stanów – przejść przed-
stawionego na rys. 2
Rys. 2 Graf zmian stanów procesu {W(t): t 0}: u1 - stan pełnej zdatności; u2 - stan niezdatności zada-
niowej;u3 - stan niezdatności pełnej; Tij - zmienna losowa opisująca czas trwania stanu ui pod warun-
kiem przejścia procesu do stanu uj (i, j=1, 2, 3, ij); pij – prawdopodobieństwo przejścia procesu ze sta-
nu ui do stanu uj (i, j=1, 2, 3, ij); E(Ti) - wartość oczekiwana czasu trwania stanu ui, niezależnie, do ja-
kiego stanu następuje przejście procesu
Tym samym macierz funkcyjna rozpatrywanego procesu ma (jak wynika z grafu) na-
stępującą postać [ 7]:
00)(
)()](1[0)()](1[
)()](1[)()](1[0
0
31
0
2321
0
2123
0
1312
0
1213
t
tt
tt
xdF
dxxFxFdxxFxF
dxxFxFdxxFxF
Q(t)=
(2)
Wykorzystanie zależności :
)()( tFptQ ijijij (3)
gdzie:
pij – prawdopodobieństwo przejścia ze stanu si do stanu sj łańcucha Markowa włożone-
go w proces semi – Markowa (i, j = 1, 2, 3 ij),
Fij(t) – dystrybuanta zmiennej losowej Tij oznaczającej czas trwania ui – tego stanu pro-
cesu, pod warunkiem, że następnym stanem będzie stan uj – ty,
umożliwia wyznaczenie postaci funkcyjnych poszczególnych elementów jądra procesu.
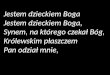
Model niezawodnościowy obiektu opracowany z zastosowaniem procesów Markowa
(proces {W’(t): t 0}) można przedstawić za pomocą grafu stanów – przejść przedstawio-
nego na rys. 3
u2
u3u1
T12, p12
T31, p31
T13, p13
T21, p21
T23, p23
E(T1) E(T3)
E(T2)

Rys. 3 Graf stanów - przejść procesu {W’(t): t T}. u’1 - stan pełnej zdatności; u’2 - stan niezdatności
zadaniowej;u’3 - stan niezdatności pełnej; ik – intensywność przejścia ze stanu ui pod warunkiem przej-
ścia procesu do stanu uk (i, k=0, 1, 2, 3 ik);
Wyznaczenie prawdopodobieństw obiektu w poszczególnych stanach wymaga ułożenia
układu równań Kołmogorowa dla przyjętego modelu zmian stanów. W tym celu, za-
miast prawdopodobieństw przejść pij (rys 3), stosowane są intensywności przejść - ik
(i, k = 1, 2, 3; i k) o następującej interpretacji [10, 11]:
ik (t) =
iutW
)(/u)W(tPlim
j
0 (4)
W praktyce wygodnym i wiarygodnym oszacowaniem tej wielkości może być określo-
na na podstawie badań lub dokumentacji technicznej i zaleceń producenta wielkość
określona jako:
ikik
ikTTE
1
)(
1 , (i,k = 1,2,3; i k) (5)
gdzie:
E(Tik) – wartość oczekiwana zmiennej losowej opisującej czas trwania stanu u’i pod
warunkiem, że następnym stanem będzie stan u’k,
ikT - średni czas układu w stanie u’i pod warunkiem, że następnym stanem będzie stan
u’k na podstawie badań lub/i dokumentacji technicznej i zaleceń producenta.
Do przeprowadzenia analizy porównawczej wzięte zostaną pod uwagę następujące
wskaźniki niezawodnościowe obliczone na podstawie rozpatrywanych modeli:
o rozkład chwilowy procesu Pj(t), oznaczający prawdopodobieństwo znalezienia się
procesu w stanie sj, w chwili t.
o rozkład graniczny procesu pk = t
lim P{W(t) = uk}
4. Przykład obliczeniowy
4.1. Semimarkowski model niezawodnościowy
Zgodnie z przyjętymi założeniami, w I etapie korzystając z generatora liczb pseudolosowych wy-
generowano 1000 realizacji zmiennych losowych opisujących czas przebywania obiektu w wyróż-
nionych stanach – u1, u2, u3.
u'2
u'1 u'3
21
12
23
31
13

Następnie w sposób również losowy zasymulowano kolejne zmiany stanów procesu {W(t): t 0}
uzyskując kolejne jego realizacje. Ilustrację graficzną (częściowego przebiegu procesu przedstawio-
no na rys. 4)
Rys. 4 Graf stanów - przejść procesu {W’(t): t T}. u’1 - stan pełnej zdatności
W rozpatrywanym modelu niezawodnościowo – funkcjonalnym przyjęto następnie, iż proces zmian
stanów niezawodnościowych badanego typu obiektów jest procesem semi – Markowa {W(t): t 0} o
zbiorze stanów
S = {u1, u2, u3},
którego postać graficzna (graf przejść) została przedstawiona na rys. 2. Z postaci grafu wynika postać
jądra procesu określona zależnością (2) zaś rozkład początkowy procesu {W(t): t 0} można przed-
stawić :
p1 = P{W (0) = s1} = 1,pi = P{W (0) = si} = 0 dla i = 2,3. (6)
W celu wyznaczenia postaci funkcyjnych poszczególnych elementów jądra procesu wykorzystano
zależność (3).
W celu wykorzystania zależności (2) i (3) na podstawie analizy wygenerowanego zbioru danych usta-
lono realizacje poszczególnych zmiennych losowych Tij oraz dokonano analizy rozpatrywanego pro-
cesu zmian stanu technicznego w celu ustalenia kolejności oraz liczby przejść nij procesu ze stanu ui
do stanu uj (i, j S, i j). Wyniki tej analizy przedstawione są w tabeli 1.

Tab. 1 Liczba przejść (nij) procesu zmian stanu technicznego badanych silników ze stanu ui do stanu uj.
n12 355
n1j 474 n13 119
n21 303 n2j 355
n23 52
n31 171 n3j 171
W następnym etapie dokonano estymacji parametrów dystrybuant zmiennych losowych Tij, weryfiku-
jąc następnie hipotezy o zgodności założonych rozkładów teoretycznych z wynikami empirycznymi.
Weryfikację przeprowadzono z użyciem testu zgodności 2 zaś w celu wyselekcjonowania prawdzi-
wej hipotezy H0, za którą uznaje się taką, w stosunku do której nie ma podstaw do jej odrzucenia, za-
stosowano regułę przyjmowania hipotez polegającą na tym, że :
jeżeli g0 g dla = 0,05 to H0 należy odrzucić;
jeżeli g0 < g dla = 0,10 to H0 należy przyjąć;
jeżeli g0 < g dla = 0,05 a dla = 0,10 g0 g to słuszność H0 jest wątpliwa i ba-
dania należy kontynuować;
przy czym :
g0 - wartość charakterystyczna testu, wyznaczana na podstawie wyników badań;
g - wartość graniczna dla poziomu istotności , tzn. wartość kwantyla rzędu dobranej staty-
styki.
Zastosowany test pozwolił na stwierdzenie braku podstaw do odrzucenia kolejnych hipotez H0 o
zgodności rozpatrywanych zmiennych Tik z rozkładem gamma oraz wykładniczym w przypadku
zmiennej losowej T31 tym samym uznano je za prawdziwe.
Tab. 2 Wartości parametrów rozkładów zmiennych losowych Tij.
Zmienna losowa Typ rozkładu Parametry rozkładu
T12 gamma g = 1,29 b = 0,010 [h-1
]
T13 gamma g = 0,74 b = 0,007 [h-1
]
T21 gamma g = 1,29 b = 0,027 [h-1
]
T23 gamma g = 1,32 b = 0,023 [h-1
]
T31 wykładniczy = 0,17 [h-1
]

W związku z tym :
)010,0exp()29,1(
010,0)( 29,0
29,1
0
12 tttF
t
(7)
)007,0exp()74,0(
007,0)( 26,0
74,0
0
13 tttF
t
(8)
)027,0exp()29,1(
027,0)( 29,0
29,1
0
21 tttF
t
(9)
)023,0exp()32,1(
023,0)( 32,0
32,1
0
23 tttF
t
(10)
)17,0exp(1)(31 ttF (11)
Do oszacowania poszczególnych prawdopodobieństw pij przyjęto następującą wielkość […]:
j
ij
ij
ijn
np* (12)
gdzie :
nij – liczba przejść procesu ze stanu ui do stanu uj (tabela 2).
Wartości statystyki określonej zależnością (12) są następujące :
50150
150
1312
12*
12
nn
np = 0, 750 (13)
50150
50
1312
13*
13
nn
np = 0,250 (14)
22128
128
2321
21*
21
nn
np = 0,853 (15)
22128
22
2321
23*
23
nn
np = 0,147 (16)
72
72
31
31*
31 n
np = 1,000 (17)
tym samym :
00
0
0
3131
23232121
13131212
(t)Fp
(t)Fp(t)Fp
(t)Fp(t)Fp
Q(t)= (18)
Rozpatrywany proces semi – Markowa zmian stanów technicznych badanego typu silników został
więc określony. Opracowany model umożliwia wyznaczenie wszystkich charakterystyk niezawodno-
ściowych niezbędnych dla dalszej analizy.
a. prawdopodobieństwa warunkowe Pij(t) – prawdopodobieństwa przejścia.

Na podstawie [7] niewiadome transformaty funkcji Pij(t) można uzyskać rozwiązując układ rów-
nań :
)(~
)(~))(~(1
)(~
sPsqsgIs
sP (19)
gdzie :
)(~)(~)(~)(~)(~)(~)(~)(~)(~
)(~
333231
232221
131211
spspsp
spspsp
spspsp
sP , I =
100
010
001
, (20)
)(~ sq = L
00
0
0
3131
2323
2121
1313
1212
dt
(t)dFp
dt
(t)dFp
dt
(t)dFp
dt
(t)dFp
dt
(t)dFp
, (21)
)(~ sg L
dt
(t)Fpddt
(t)Fp(t)Fpddt
(t)Fp(t)Fpd
3131
23232121
13131212
00
00
00
, (22)
Warunkowe prawdopodobieństwa Pij(t) pozwalają na wyznaczenie rozkładu Pj (t) :
SjstWPtP jj ,)()( (23)
Na podstawie wzoru na prawdopodobieństwo całkowite [43] oraz dla przyjętego rozkładu początko-
wego procesu {W(t): t 0} rozkład ten przedstawia się następująco :
)()( 1 tPtP jj (24)
Prawdopodobieństwa Pj (t) stanowią więc elementy pierwszego wiersza macierzy :
)()( tPtP ij (25)
Prawdopodobieństwa te przedstawiono na rys. 5.
Przyjęty rozkład początkowy procesu {W(t): t 0} jest uzasadniony, gdy silnik przed rozpoczęciem
wykonywania zadania musi znajdować się w stanie s1. W tym przypadku istotna jest analiza prawdo-
podobieństw P11 (t) = P1 (t), P12 (t) = P2 (t) i P13 (t) = P3 (t), które dla t mogą być interpretowane
następująco P11 (t) = P1 (t), P12 (t) = P2 (t) i P13 (t) = P3 (t), (oznaczają prawdopodobieństwa znalezie-
nia się obiektu odpowiednio w stanach : u1, u2, i u3, pod warunkiem, iż stanem początkowym był stan
u1).

Rys. 5 Prawdopodobieństwa warunkowe P11(t), P12(t), P13(t)
4.2. Markowski model niezawodnościowy
W przypadku zastosowania procesów Markowa wyznaczenie prawdopodobieństw przebywania
systemu w poszczególnych stanach możliwe jest poprzez rozwiązanie układu równań Kołmogorowa
(…).
Uwzględniając graf zmian stanów procesu {W’(t) : t 0} i jego rozkład początkowy dla rozpa-
trywanego przypadku układ ten będzie przedstawiał się następująco:
)()()()(
)()()()(
)()()()()(
2231133313
112223212
331221113121
tPtPtPdt
tdP
tPtPdt
tdP
tPtPtPdt
tdP
(26)
Rozkłady empiryczne zmiennych losowych Tik zostały wykorzystane do weryfikacji hipotez staty-
stycznych o ich zgodności z rozkładem wykładniczym, przy czym założono, że estymatorami parame-
trów tych rozkładów ik mogą być wartości ik̂ wyznaczone wg zależności (5). Wartości te przedsta-
wiono w tab. 3.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0
40
80
120
160
200
240
280
320
360
400
440
480

Tab. 3. Wartości estymatorów parametrów rozkładów wykładniczych zmiennych losowych Ti oraz Tik
Zmienna losowa ̂
[h-1
]
T12 0,0078
T21 0,0210
T23 0,0170
T13 0,0094
T31 0,1700
Weryfikację przeprowadzono z użyciem testu zgodności 2 przy zastosowaniu opisanych wcze-
śniej reguł wnioskowania. Zastosowany test pozwolił na stwierdzenie braku podstaw do odrzucenia
kolejnych hipotez H0 o zgodności rozpatrywanych zmiennych Tik z rozkładem wykładniczym tym
samym uznano je za prawdziwe.
Wykorzystując do rozwiązania układu równań (26) przekształcenie Laplace’a [2], rozkład począt-
kowy procesu {W(t) : t 0} oraz wartości ik̂ uzyskano następujący układ równań liniowych w dzie-
dzinie transformat:
)(17,0)(017,0)(0094,0)(
)()017,0021,0()(0078,0)(
)(17,0)(021,0)()0094,00078,0(1)(
*
3
*
2
*
1
*
3
*
2
*
1
*
2
*
3
*
2
*
1
*
1
sPsPsPsPs
sPsPsPs
sPsPsPsPs
(27)
Rozwiązanie przedstawionego układu równań i wykonanie odwrotnego przekształcenia Laplace’a
pozwoliło na znalezienie rozkładu chwilowego procesu pj(t) = P{W’(t) = u’j}. Graficzna wersja tego
rozwiązania przedstawiona jest na rys. 6
Rys. 6. Wyniki obliczeń rozkładu chwilowego dla rozkładu początkowego p1 = P{W’ (0) = u’1} = 1,
pi = P{W (0) =u’i} = 0 dla i = 2, 3;

5. Podsumowanie
Wyniki uzyskane wskutek zastosowania prezentowanych modeli w odniesieniu do jednego zbioru
danych reprezentujących symulowane wyniki badań empirycznych zestawione zostały na rys. 7 a
graficzna ilustracja błędu względnego (przy założeniu, że modelem bazowym jest model w formie
procesu semimarkowskiego) na rys. 8.
Rys. 7. Porównanie wyników obliczeń wskutek zastosowania modelu semimarkowskiego oraz modelu w formie procesu
Markowa (oznaczenia prawdopodobieństw identyczne jak w tekście)
Rys. 8. Błędy względne zastosowania modelu Markowa

Analiza rys. 7 oraz 8 skłania do następujących wniosków:
Zastosowanie modelu semimarkowskiego prowadzi do uzyskania niższych wartości
prawdopodobieństwa przebywania obiektu w stanie pełnej zdatności co w praktyce pro-
wadzi do podejmowania decyzji, które można nazwać ostrożnymi
Błąd względny oszacowania prawdopodobieństwa przebywania obiektu w stanie pełnej
zdatności jest znikomy i w rozważanym przypadku wyniósł ok 4%
Należy rozważyć tym samym, czy skomplikowany aparat matematyczny (równania 19 –
22) warty jest stosowania w konkretnych sytuacjach, gdyż jak wiadomo jednym z warun-
ków praktycznej użyteczności opracowywanych modeli w postaci procesów semimarkow-
skich jest oprócz umiarkowanego skomplikowania modelu w sensie wyróżnionej jak naj-
mniejszej, niezbędnej liczby klas stanów dodatkowo w miarę nieskomplikowana w sensie
matematycznym jego macierz funkcyjna - Q(t). Warunek ten jest istotny w przypadku ob-
liczania rozkładu chwilowego stanów procesu pk(t). Rozkład ten można , jak wiadomo [7],
obliczyć znając rozkład początkowy procesu oraz funkcję pij(t). Obliczenie prawdopodo-
bieństwa pij(t) polega na rozwiązaniu układu równań Voltery drugiego rodzaju, w których
znanymi wielkościami są funkcje Qij(t) będące elementarnymi macierzy funkcyjnej Q(t)
procesu. W przypadku gdy liczba stanów procesu jest niewielka, zaś macierz funkcyjna
tego procesu - nieskomplikowana, to układ ten można rozwiązać operatorowo przez zasto-
sowanie transformacji Laplace`a. Natomiast gdy liczba stanów procesu jest duża lub jeżeli
jego macierz funkcyjna (jądro procesu) jest bardzo złożona, można uzyskać jedynie przy-
bliżone rozwiązanie tego układu równań. Rozwiązanie to (numeryczne) nie daje możliwo-
ści ustalenia wartości prawdopodobieństw pojawienie się poszczególnych stanów procesu,
gdy t ma dużą wartość (teoretycznie t ). Numeryczne rozwiązanie nie daje więc od-
powiedzi na bardzo ważne dla praktyki eksploatacyjnej pytanie: jak zmieniają się praw-
dopodobieństwa stanów procesu semimarkowskiego, gdy t jest duże? Z teorii procesów
semimarkowskich wynika, że prawdopodobieństwa te, w przypadku ergodycznych proce-
sów semimarkowskich, dążą wraz z upływem czasu do ściśle określonych, stałych liczb
[7, 13]. Liczby te nazywane są granicznymi prawdopodobieństwami stanów, a ciąg tych
liczb tworzy rozkład graniczny procesu. Rozkład ten można znacznie łatwiej obliczyć niż
rozkład chwilowy a umożliwia on zdefiniowanie współczynnika gotowości np. silnika
oraz dochód lub koszt przypadający na jednostkę czasu eksploatacji. Wielkości te mogą
zaś być funkcjami kryterialnymi przy rozwiązywaniu problemów optymalizacji procesu
eksploatacji silników.
W przypadku dość skomplikowanego grafu stanów – przejść pojawia się jeszcze jedna
możliwość oszacowania poszukiwanych wartości prawdopodobieństwa poprzez opraco-
wanie modelu procesu {W(t) : t 0} w postaci procesu Markowa - {W’(t) : t 0}. Mode-
le takie stanowią pewne uproszczenie modeli semimarkowskich. Proces Markowa różni

się od procesu semi - Markowa tym, że przedziały bezwarunkowego czasu przebywania
procesu w poszczególnych stanach oraz przedziały czasu trwania określonego stanu tego
procesu, pod warunkiem, że następnym jego stanem będzie jeden z pozostałych stanów, w
których może się on znaleźć, są zmiennymi losowymi o rozkładzie wykładniczym [4, 5].
Taki stan rzeczy ogranicza stosowanie tych procesów, jednak w przypadku opisanych wy-
żej trudności z opracowaniem modelu semimarkowskiego lub też kiedy rozpatrywane
zmienne losowe mają nieznane rozkłady można uzyskane wyniki potraktować jako pierw-
sze przybliżenie. Wykorzystanie rozkładów wykładniczych umożliwia uzyskanie bardzo
prostych zależności stanowiących rozkład badanego procesu.
6. Bibliografia
[ 1] Benjamin J.R., Cornell C.A.: Rachunek prawdopodobieństwa, statystyka matematyczna i teoria decyzji
dla inżynierów. WNT, Warszawa 1977.
[ 2] Bobrowski D., Ratajczak Z.: Przekształcenie Laplace'a i jego zastosowanie. Wydawnictwo Politechniki
Poznańskiej, Poznań 1985.
[ 3] DeGroot M.: Optymalne decyzje statystyczne. PWN, Warszawa 1981.
[ 4] Gercbach I.B., Kordonski Ch.B.: Modele niezawodnościowe obiektów technicznych. WNT, Warszawa
1968.
[ 5] Gichman I.I, Skorochod A.W.: Wstęp do teorii procesów stochastycznych. PWN, Warszawa 1968.
[ 6] Girtler J.: Możliwości zastosowania i przydatność procesów semimarkowskich jako modeli procesów
eksploatacji maszyn. Zagadnienia Eksploatacji Maszyn, z. 3/1996, s. 419-428.
[ 7] Grabski F.: Teoria semi-markowskich procesów eksploatacji obiektów technicznych. Zeszyty Naukowe
AMW, nr 75A, Gdynia 1982.
[ 8] Jędrzejowicz P., Wybrane modele decyzyjne w produkcji i eksploatacji. WKiŁ, Warszawa 1981.
[ 9] Rudnicki J. Opracowanie zbioru stanów technicznych i energetycznych układów tłokowo – korbowych
silników zachodzących w czasie ich działania. Praca wykonana w ramach projektu finansowanego przez
MNiSW. Projekt badawczy pt.: „Decyzyjne sterowanie procesem eksploatacji układów korbowo-
tłokowych silników o zapłonie samoczynnym napędu głównego statków morskich z zastosowaniem dia-
gnostyki technicznej oraz z uwzględnieniem bezpieczeństwa i ochrony morskiego środowiska naturalne-
go”. Gdańsk 2010.
[ 10] Rudnicki J.: Model niezawodnościowo – funkcjonalny okrętowego, tłokowego silnika spalinowego,
2000. Rozprawa doktorska (11.03.2000). Politechnika Szczecińska, Wydział Techniki Morskiej.
[ 11] Rudnicki J.: Application Isssues of the Semi-Markov Reliability Model, Polish Maritime Research, Vol.
22, Issue 1, pp. 55-64, Gdansk University of Technology, 2015.
[ 12] Sadowski W.: Teoria podejmowania decyzji. Państwowe Wydawnictwo ekonomiczne. Warszawa 1976.
[ 13] Wentzell A.D.: Wykłady z teorii procesów Stochastycznych. PWN, Warszawa 1980.