Embed Size (px)
Citation preview
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 1
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
Analysis of Flow distribution in 3D high speed turbine.
Vinod M,G.leela Siva Ram Prasad – M.Tech
DJR College of Engineering & Technology
Email [email protected]
ABSTRACT
The project Deals with the Computational
Flu id Dynamic analysis of Flow through High
speed turbine. The turbine is main ly used in the
power generation process at first the model is
designed in the commercial software package solid
works and analyzed in the Fluent. The main aim of
the project is to derive the Temperature and other
physical parameters of the turbine in this project we
firstly use water as a fluid and we extract the
readings from the Fluent and after we analyses the
turbine with air and analyses the turbine for one
more t ime and we compare the results of physical
parameters. The whole work involves numerous
computational facilities and skills.
INTRODUCTION
A water turbine is arotary engine that
converts kinetic and potential energy of water
into mechanical work. Water turbines were
developed in the 19th century and were widely
used for industrial power prior to electrical grids.
Now they are mostly used for electric
power generation. Water turbines are mostly found
in dams to generate electric power from
water kinetic energy.
Types of Water Turbines
Water turbines are divided into two
groups; reaction turbines and impulse turbines.
The precise shape of water turbine b lades is a
function of the supply pressure of water, and the
type of impeller selected.
REACTION TURBINES
Reaction turbines are acted on by water,
which changes pressure as it moves through the
turbine and gives up its energy. They must be
encased to contain the water pressure (or suction),
or they must be fully submerged in the water flow.
Newton's third law describes the transfer of energy
for react ion turbines. Most water turbines in use are
reaction turbines and are used in low (<30 m or
100 ft) and medium (30–300 m or 100–1,000 ft)
head applications. In reaction turbine pressure drop
occurs in both fixed and moving blades. It is
largely used in dam and large power p lants
REACTION TURBINES :
VLH turbine
Francis turbine
Kaplan turbine
Tyson turbine
Gorlov helical turbine
Francis Turbine
Francis turbine, a type of widely used
water turbine. Francis turbine is one having a
runner with buckets, usually nine or more to which
the water enters the turbine in a radial direction
with respect to shaft. The Francis turbine is a type
of water turbine that was developed by James B.
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 2
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
Francis in Lowell, Massachusetts. It is an inward-
flow react ion turbine that combines radial and axial
flow concepts. Francis turbines are the most
common water turbine in use today. They operate
in a water head from 40 to 600 m (130 to 2,000 ft)
and are primarily used for electrical power
production. The electric generator which most
often use this type of turbine, have a power output
which generally ranges just a few kilowatts up to
800 MW, though mini-hydro installat ions may be
lower. Penstock (input pipes) diameters are
between 3 and 33 feet (0.91 and 10.06 meters). The
speed range of the turbine is from 83 to 1000 rpm.
Wicket gates around the outside of the turbine's
rotating runner control the rate of water flow
through the turbine for different power production
rates. Francis turbines are almost always mounted
with the shaft vertical to keep water away from the
attached generator and to facilitate installation and
maintenance access to it and the turbine.
IMPULS E TURBINES
Impulse turbines change the velocity of a
water jet. The jet pushes on the turbine's curved
blades which changes the direction of the flow. The
resulting change in momentum (impulse) causes a
force on the turbine blades. Since the turbine is
spinning, the force acts through a distance (work)
and the diverted water flow is left with dimin ished
energy. An impulse turbine is one which the
pressure of the fluid flowing over the rotor blades
is constant and all the work output is due to the
change in kinetic energy of the fluid. Prior to
hitting the turbine blades, the water's pressure
(potential energy) is converted to kinetic energy by
a nozzle and focused on the turbine. No pressure
change occurs at the turbine blades, and the turbine
doesn't require housing for operation. Newton's
second law describes the transfer of energy for
impulse turbines. Impulse turbines are often used
in very high (>300m/1000 ft) head applications.
IMPULS E TURBINE
Water wheel
Pelton wheel
Turgo turbine
Cross-flow turbine (also known as the
Bánki-Michell turbine, or Ossberger turbine)
Jonval turbine
Reverse overshot water-wheel
Screw turbine
Barkh Turb ine
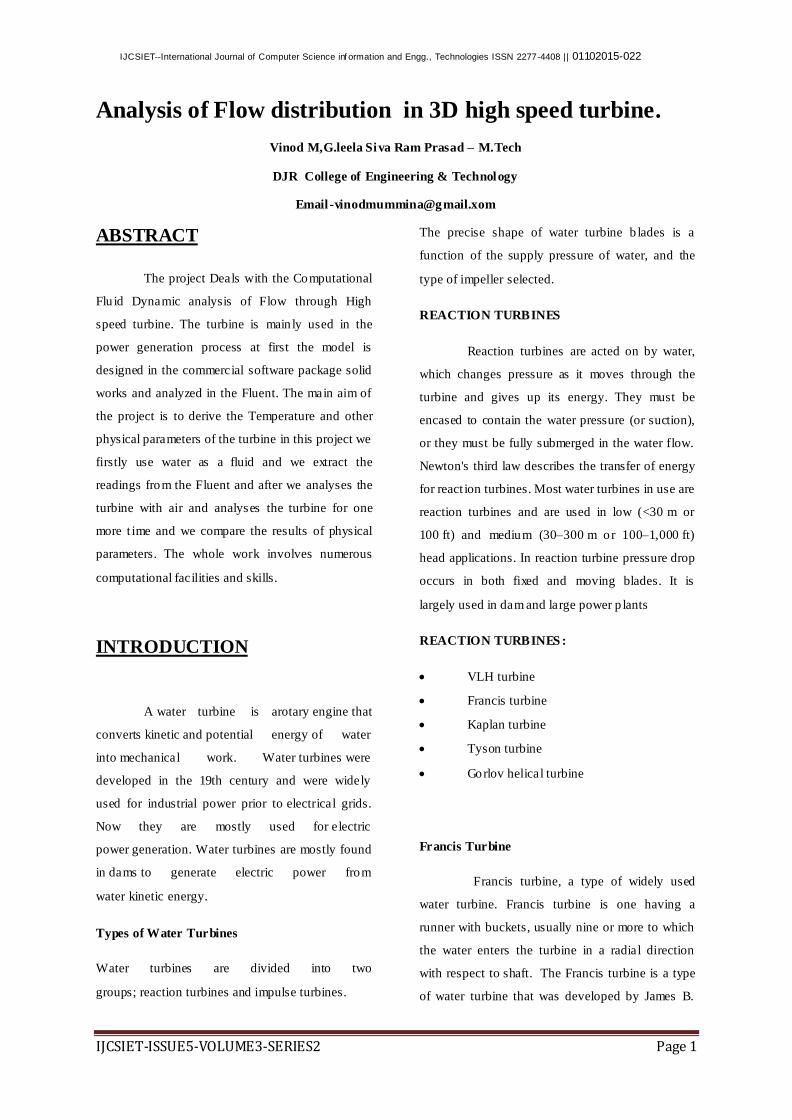
Design and Application
Figure1. Ture Application chart
Turbine selection is based on the available
water head, and less so on the available flow rate.
In general, impulse turbines are used for high head
sites, and reaction turbines are used for low
head sites. Kaplan turbines with adjustable blade
pitch are well-adapted to wide ranges of flow or
head conditions, since their peak efficiency can be
achieved over a wide range of flow conditions.
Small turbines (mostly under 10 MW) may have
horizontal shafts, and even fairly large bulb-type
turbines up to 100 MW or so may be horizontal.
Very large Francis and Kaplan machines usually

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 3
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
have vertical shafts because this makes best use of
the available head, and makes installation of a
generator more economical. Pelton wheels may be
either vertical or horizontal shaft machines because
the size of the machine is so much less than the
available head. Some impulse turbines use multiple
jets per runner to balance shaft thrust. This also
allows for the use of a s maller turbine runner,
which can decrease costs and mechanical losses.
Typical Range Of Heads
• Water wheel 0.2 < H < 4 (H = head
in m)
• Screw turbine 1 < H < 10
• VLH turbine 1.5 < H < 4.5
• Kaplan turbine 20 < H < 40
• Francis turbine 40 < H < 600
• Pelton wheel 50 < H < 1300
• Turgo turbine 50 < H < 250
High Speed turbine
The High Speed turbine is a type of water
turbine that was developed in Lowell,
Massachusetts. It is an inward-flow reaction
turbine that combines radial and axial flow
concepts. High Speed turbines are the most
common water turb ine in use today. They operate
in a water head from 40 to 600 m (130 to 2,000 ft)
and are primarily used for electrical power
production. The electric generators which most
often use this type of turbine have a power output
which generally ranges just a few kilowatts up to
800 MW, though min i-hydro installations may be
lower. Penstock (input pipes) diameters are
between 3 and 33 feet (0.91 and 10.06 meters). The
speed range of the turbine is from 75 to 1000 rpm.
Wicket gates around the outside of the turbine's
rotating runner control the rate of water flow
through the turbine for different power production
rates. High Speed turbines are almost always
mounted with the shaft vertical to isolate water
from the generator. This also facilitates installation
and maintenance.
The water flow in the High Speed turbine
must be in the form of radial direction and exists
through the turbine axially. When the turbine
impart ing then the water pressure must be
decreases and is hits the blades when turbine
rotates. It is the first turbine with a radial inflow. It
is also known as reaction turbine. Compare to the
impulse turbine has some features. We can see the
major p ressure drop in the turbine. Up to the entry
point we can see the complete pressure drop in the
impulsive turbine. During the operation in the
water flow is completely.
Design of high speed turbine
High Speed turbine consists of circular
plates which are fixed to the rotating shafts and is
perpendicular to the surface. The water flow takes
from the centre. We can notice the curved channels
on the circular p lates. The plate with the channels is
known as runner. The runner is surrounding by a
ring of mot ionless channels which is known as
guide vanes. With the help of the spiral casing the
guide vanes are mounted which is known as volute.
We can see the exit of the flow from the centre of
the runner plate. To the central exit of the runner
the draft tube is attached. During the time of
designing we can also notice the design parameter
like angles of vanes, radius of the runner, curvature
of channel, size of the turbine must be depends
upon the size of the head availab le.
Working of High S peed Turbine
High Speed turbines are the most
preferred hydraulic turbines. They are the most
reliable workhorse of hydroelectric power
stations. It contributes about 60 percentage of
the global hydropower capacity, main ly
because it can work efficiently under a wide
range of operating conditions. Water head and
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 4
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
flow rate are the most vital input parameters
that govern performance of a hydraulic turbine.
But these parameters are subjected to seasonal
variation in a hydroelectric power station.
High Speed turbine is capable of delivering
high efficiency even if there is a huge variation
in these flow parameters. The preferable Head
and Flow ranges for High Speed turbine is 45-
400 m and 10-700 m3/s
In this article we will understand working
of High Speed turbine and will also realize why it
is capable to work under varying flow condit ions.
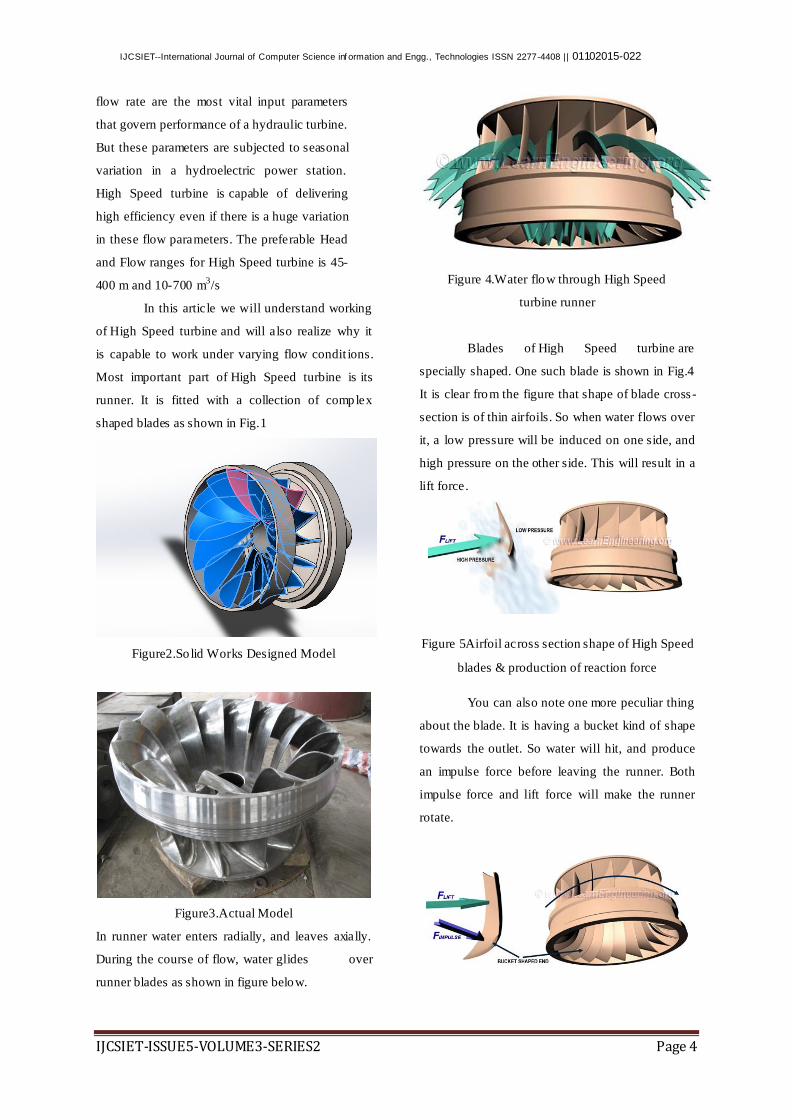
Most important part of High Speed turbine is its
runner. It is fitted with a collection of complex
shaped blades as shown in Fig.1
Figure2.So lid Works Designed Model
Figure3.Actual Model
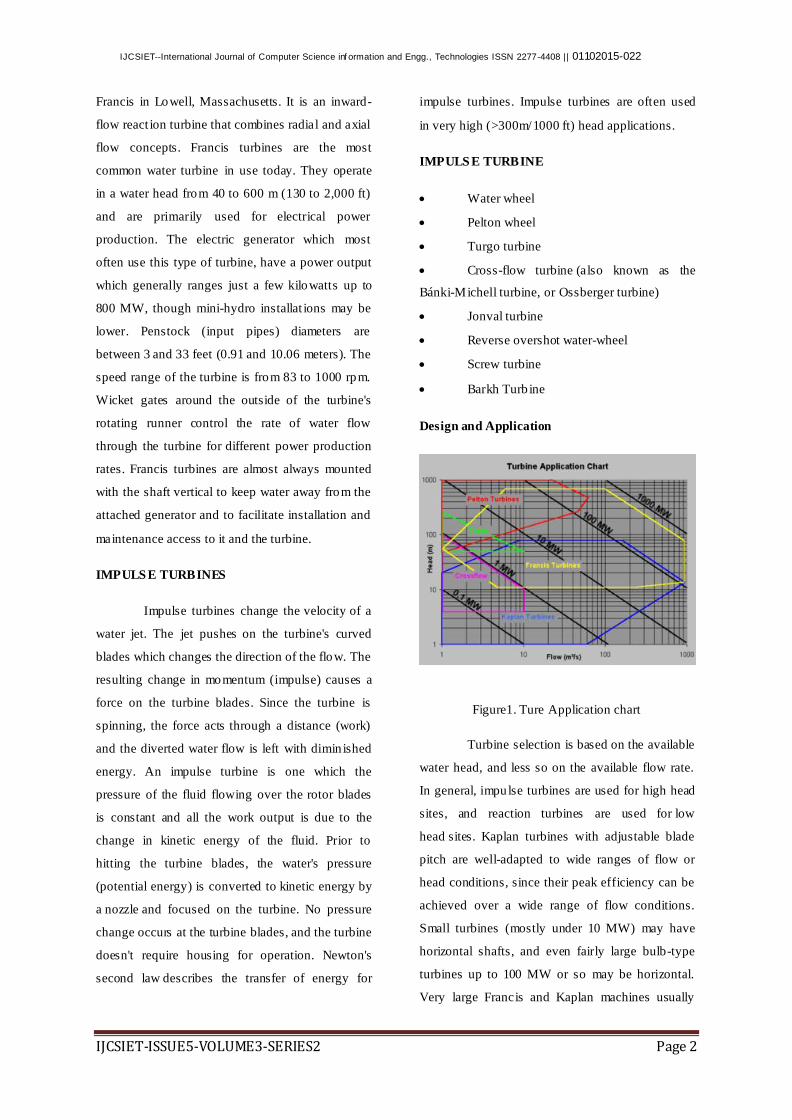
In runner water enters radially, and leaves axially.
During the course of flow, water glides over
runner blades as shown in figure below.
Figure 4.Water flow through High Speed
turbine runner
Blades of High Speed turbine are
specially shaped. One such blade is shown in Fig.4
It is clear from the figure that shape of blade cross-
section is of thin airfoils. So when water flows over
it, a low pressure will be induced on one side, and
high pressure on the other side. This will result in a
lift force.
Figure 5Airfoil across section shape of High Speed
blades & production of reaction force
You can also note one more peculiar thing
about the blade. It is having a bucket kind of shape
towards the outlet. So water will hit, and produce
an impulse force before leaving the runner. Both
impulse force and lift force will make the runner
rotate.
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 5
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
Figure 6High Speed turbine derive energy from
combined action of reaction and impulse force
So High Speed turbine is not a pure
reaction turbine, a portion of force comes from
impulse action also. Thus as water flows over
runner blades both its kinetic and pressure energy
will come down. Since flow is entering rad ially and
leaves axially, they are also called „mixed flow
turbine‟. Runner is connected to generator, via a
shaft, for electricity production.
Use of Spiral Casing in High S peed Turbine
Runner is fitted, inside a spiral casing.
Flow is entered via an inlet nozzle. Flow rate of
water will get reduced along length of casing, since
water is drawn into the runner. But decreasing area
of spiral casing will make sure that, flow is entered
to runner region almost at uniform velocity.
Figure 7.Spiral casing makes sure that flow is
entered uniformly along the periphery of runner
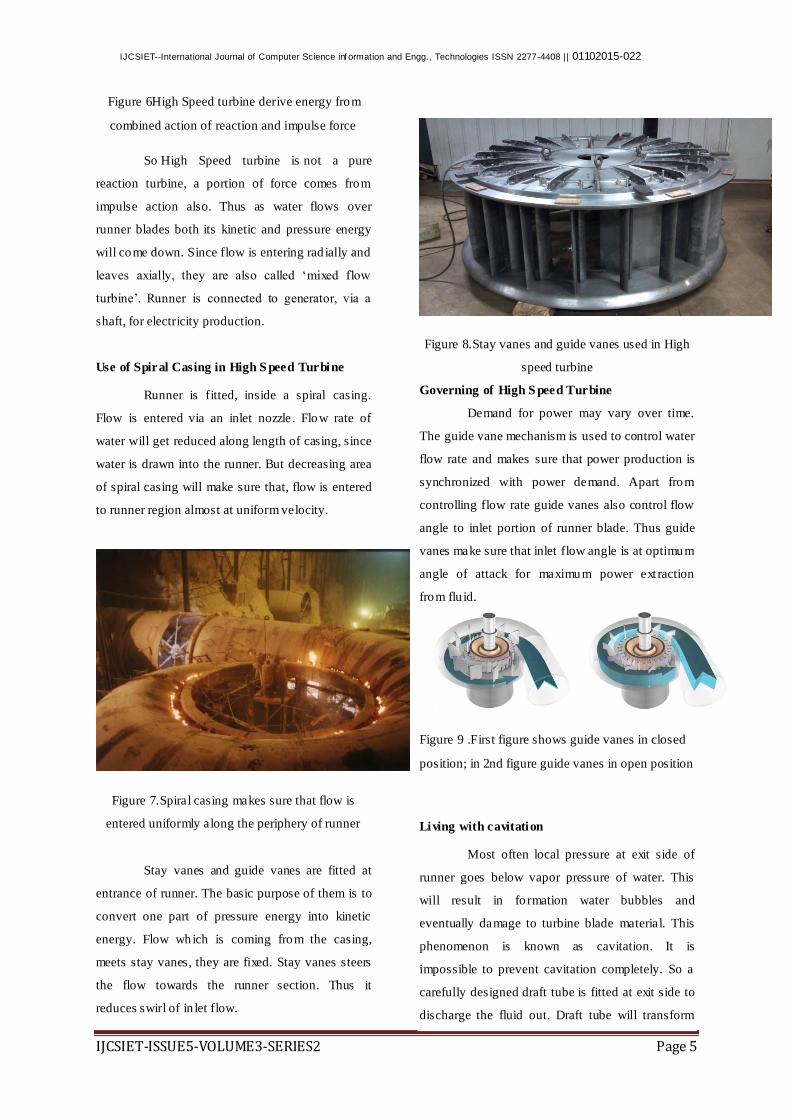
Stay vanes and guide vanes are fitted at
entrance of runner. The basic purpose of them is to
convert one part of pressure energy into kinetic
energy. Flow which is coming from the casing,
meets stay vanes, they are fixed. Stay vanes steers
the flow towards the runner section. Thus it
reduces swirl of in let flow.
Figure 8.Stay vanes and guide vanes used in High
speed turbine
Governing of High S peed Turbine
Demand for power may vary over time.
The guide vane mechanism is used to control water
flow rate and makes sure that power production is
synchronized with power demand. Apart from
controlling flow rate guide vanes also control flow
angle to inlet portion of runner blade. Thus guide
vanes make sure that inlet flow angle is at optimum
angle of attack for maximum power ext raction
from flu id.
Figure 9 .First figure shows guide vanes in closed
position; in 2nd figure guide vanes in open position
Living with cavitation
Most often local pressure at exit side of
runner goes below vapor pressure of water. This
will result in fo rmation water bubbles and
eventually damage to turbine blade material. This
phenomenon is known as cavitation. It is
impossible to prevent cavitation completely. So a
carefully designed draft tube is fitted at exit side to
discharge the fluid out. Draft tube will transform
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 6
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
velocity head to static head due to its increasing
area and will reduce effect of cavitation. As we can
observe the increase in area from top to bottom in
the Draft tube.
Figure 10.Conversion of velocity head to static
head with help of draft tube.
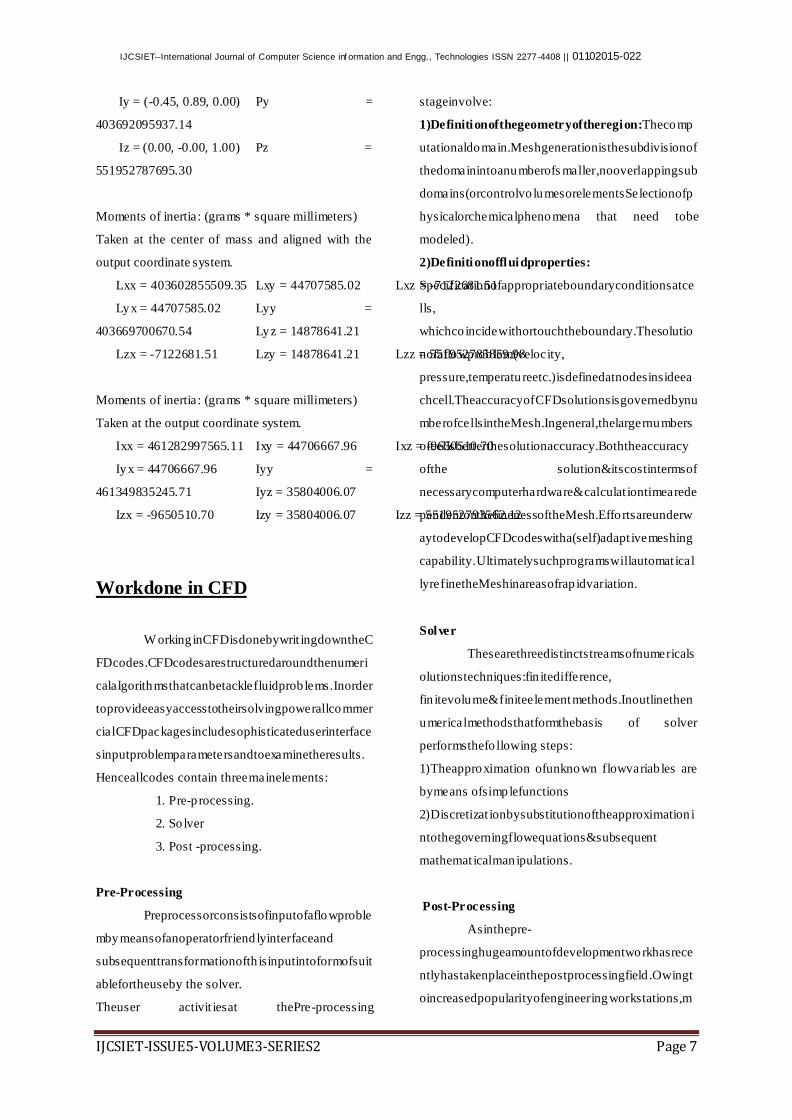
Geometric Modeling Of High
Speed Turbine In Solid Works
Figure 11.Dimensions of high speed
turbine
Figure 12.Different views of High Speed
Turbine
Figure13 .Material Properties of High Speed
Turbine
DES IGN PROPER TIES OF HIGH SPEED
TURBINE
Mass properties of Francis turbine bilal
Configuration: Default
Coordinate system: -- default --
Density = 0.00 grams per cubic millimeter
Mass = 1239623.51 grams
Volume = 1239623505.21 cubic millimeters
Surface area = 30595664.56 square millimeters
Center of mass: (millimeters)
X = -0.01
Y = 0.08
Z = 215.71
Principal axes of inert ia and principal moments of
inertia: (grams * square millimeters)
Taken at the center of mass.
Ix = (0.89, 0.45, 0.00) Px =
403580458407.42
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 7
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
Iy = (-0.45, 0.89, 0.00) Py =
403692095937.14
Iz = (0.00, -0.00, 1.00) Pz =
551952787695.30
Moments of inertia: (grams * square millimeters)
Taken at the center of mass and aligned with the
output coordinate system.
Lxx = 403602855509.35 Lxy = 44707585.02 Lxz = -7122681.51
Lyx = 44707585.02 Lyy =
403669700670.54 Lyz = 14878641.21
Lzx = -7122681.51 Lzy = 14878641.21 Lzz = 551952785859.98
Moments of inertia: (grams * square millimeters)
Taken at the output coordinate system.
Ixx = 461282997565.11 Ixy = 44706667.96 Ixz = -9650510.70
Iyx = 44706667.96 Iyy =
461349835245.71 Iyz = 35804006.07
Izx = -9650510.70 Izy = 35804006.07 Izz = 551952793562.12
Workdone in CFD
W orking inCFDisdonebywrit ingdowntheC
FDcodes.CFDcodesarestructuredaroundthenumeri
calalgorithmsthatcanbetacklefluidprob lems.Inorder
toprovideeasyaccesstotheirsolvingpowerallcommer
cialCFDpackagesincludesophisticateduserinterface
sinputproblemparametersandtoexaminetheresults.
Henceallcodes contain threemainelements:
1. Pre-processing.
2. So lver
3. Post -processing.
Pre-Processing
Preprocessorconsistsofinputofaflowproble
mbymeansofanoperatorfriend lyinterfaceand
subsequenttransformationofth isinputintoformofsuit
ablefortheuseby the solver.
Theuser activit iesat thePre-processing
stageinvolve:
1)Definitionofthegeometryoftheregion:Thecomp
utationaldomain.Meshgenerationisthesubdivisionof
thedomainintoanumberofs maller,nooverlappingsub
domains(orcontrolvo lumesorelementsSelectionofp
hysicalorchemicalphenomena that need tobe
modeled).
2)Definitionoffluidproperties:
Specificationofappropriateboundaryconditionsatce
lls,
whichco incidewithortouchtheboundary.Thesolutio
nofaflowprob lem(velocity,
pressure,temperatu reetc.)isdefinedatnodesinsideea
chcell.TheaccuracyofCFDsolutionsisgovernedbynu
mberofcellsintheMesh.Ingeneral,thelargernumbers
ofcellsbetterthesolutionaccuracy.Boththeaccuracy
ofthe solution&itscostintermsof
necessarycomputerhardware&calculat iontimearede
pendentonthefinenessoftheMesh.Effo rtsareunderw
aytodevelopCFDcodeswitha(self)adapt ivemeshing
capability.Ultimatelysuchprogramswillautomat ical
lyrefinetheMeshinareasofrap idvariation.
Solver
Thesearethreedistinctstreamsofnumericals
olutionstechniques:fin itedifference,
fin itevolume&finiteelementmethods.Inoutlinethen
umericalmethodsthatformthebasis of solver
performsthefo llowing steps:
1)Theapproximation ofunknown flowvariab les are
bymeans ofsimplefunctions
2)Discretizat ionbysubstitutionoftheapproximation i
ntothegoverningflowequat ions&subsequent
mathemat icalman ipulations.
Post-Processing
Asinthepre-
processinghugeamountofdevelopmentworkhasrece
ntlyhastakenplaceinthepostprocessingfield .Owingt
oincreasedpopularityofengineeringworkstations,m

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 8
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
anyofwhichhasoutstandinggraphicscapabilities,thel
eadingCFDarenowequippedwithversatiledatavisual
izationtools.
These include:
1)Domaingeometry&Meshdisplay
2)Vectorp lots
3)Line&shadedcontourplots
4)2D&3Dsurfacep lots
5)Part icletracking
6)Viewmanipulat ion (translat ion,
rotation,scalingetc.)
Turbulence modeling is the construction
and use of a model to predict the effects
of turbulence. A turbulent fluid flow has features
on many different length scales, which all interact
with each other. A common approach is to average
the governing equations of the flow, in o rder to
focus on large-scale and non-fluctuating features of
the flow. However, the effects of the small scales
and fluctuating parts must be modelled.
Closure Problem
The Navier–Stokes equations govern the
velocity and pressure of a fluid flow. In a turbulent
flow, each of these quantities may be decomposed
into a mean part and a fluctuating part. Averaging
the equations gives the Reynolds-averaged Navier–
Stokes (RANS) equations, which govern the mean
flow. However, the nonlinearity of the Navier–
Stokes equations means that the velocity
fluctuations still appear in the RANS equations, in
the nonlinear term ''
ji vv from the convective
acceleration. Th is term is known as the Reynolds
stress, Rij its effect on the mean flow is like that of
a stress term, such as from pressure or viscosity.
To obtain equations containing only the
mean velocity and pressure, we need to close the
RANS equations by modelling the Reynolds stress
term Rij as a function of the mean flow, removing
any reference to the fluctuating part of the velocity.
This is the closure problem.
Eddy Viscosity
Joseph Boussinesq was the first to attack
the closure problem, by introducing the concept
of eddy viscosity. In 1887 Boussinesq proposed
relating the turbulence stresses to the mean flow to
close the system of equations. Here the Boussinesq
hypothesis is applied to model the Reynolds stress
term. Note that a new proportionality constant v t>0,
the turbulence eddy viscosity, has been introduced.
Models of this type are known as eddy viscosity
models or EVM's.
ij
i
j
j
itji K
x
v
x
vvvv
3
2''
Which can be written in short hand as
''
ji vv = ijijt KSv 3
22
where ijS is the mean rate of strain tensor
tv is the turbulence eddy viscosity
''
2
1ji vvK is the turbulence kinetic energy
and ij is the Kronecker delta.
In this model, the additional turbulence
stresses are given by augmenting
the molecu lar v iscosity with an eddy viscosity. This
can be a simple constant eddy viscosity (which
works well for some free shear flows such as
axisymmetric jets, 2-D jets, and mixing layers).

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 9
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
Prandtl's Mixing-Length Concept
Later, Ludwig Prandtl introduced the
additional concept of the mixing length, along with
the idea of a boundary layer. For wall-bounded
turbulent flows, the eddy viscosity must vary with
distance from the wall, hence the addition of the
concept of a 'mixing length'. In the simplest wall-
bounded flow model, the eddy viscosity is given by
the equation:
2
mt ly
uv
where:
y
u
is the partial derivative of the stream wise
velocity (u) with respect to the wall normal
direction (y);
ml is the mixing length.
This simple model is the basis for the "law
of the wall", which is a surprisingly accurate model
for wall-bounded, attached (not separated) flow
fields with s mall pressure gradients.
More general turbulence models have
evolved over time, with most modern turbulence
models given by field equations similar to
the Navier-Stokes equations.
Smagorinsky Model for the Sub-Grid Scale
Eddy Viscosity
Joseph Smagorinsky (1964) proposed a
useful formula for the eddy viscosity in numerical
models, based on the local derivatives of the
velocity field and the local grid size:
222
2
1
x
v
y
u
y
v
x
uyxvt
Spalart–Allmaras, K–Ε And K–Ω Models
The Boussinesq hypothesis is employed in
the Spalart–Allmaras (S–A), k–ε (k–epsilon),
and k–ω (k–omega) models and offers a relatively
low cost computation for the turbulence
viscosity . The S–A model uses only one
additional equation to model turbulence viscosity
transport, while the k models use two.
k-epsilon turbulence model
K-epsilon (k-ε) turbulence model is the
most common model used in Computational Flu id
Dynamics (CFD) to simulate mean flow
characteristics for turbulent flow conditions. It is a
two equation model which gives a general
description of turbulence by means of two transport
equations (PDEs). The original impetus for the K-
epsilon model was to improve the mixing-length
model, as well as to find an alternative to
algebraically prescrib ing turbulent length scales in
moderate to high complexity flows.
The first transported variable determines
the energy in the turbulence and is called turbulent
kinetic energy (k).
The second transported variable is the
turbulent dissipation (ε) which determines the rate
of dissipation of the turbulent kinetic energy.
Principle
Unlike earlier turbulence models, k-ε
model focuses on the mechanisms that affect the
turbulent kinetic energy. The mixing length
model lacks this kind of generality. The underlying

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 10
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
assumption of this model is that the turbulent
viscosity is isotropic, in other words, the ratio
between Reynolds stress and mean rate of
deformations is the same in all directions.
Standard k-ε turbulence model
The exact k-ε equations contain many
unknown and unmeasurable terms. For a much
more pract ical approach, the standard k-
ε turbulence model (Launder and Spalding, 1974)
is used which is based on our best understanding of
the relevant processes, thus minimizing unknowns
and presenting a set of equations which can be
applied to a large number of turbulent applicat ions.
For turbulent kinetic energy k
ijijt
jk
t
ji
i EEx
k
xx
ku
t
k2
For dissipation
k
CEEk
Cxxx
u
tijijt
j
t
ji
i
2
21 2
In other words,
Rate of change of k or ε + Transport of k
or ε by convection = Transport of k o r ε
by diffusion + Rate of production of k or
ε - Rate of destruction of k or ε
Where
iu Represents velocity component in
corresponding direction
ijE Represents component of rate of deformat ion
t Represents eddy viscosity
2kCt
The equations also consist of some
adjustable constants 1,, Ck and
2C . The
values of these constants have been arrived at by
numerous iterations of data fitting for a wide range
of turbulent flows. These are as follows:
09.0C 00.1k 30.1
44.11 C 92.12 C
CFD modelling of High Speed
Turbine
Geometry Import and Named Selection on pre
processing
Figure 14.Imported solid works geometry
Firstly the geometry is designed in the
solid works and then converted in to para
solid or step or IGES form to make the
design compatible with the fluent
workbench.
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 11
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
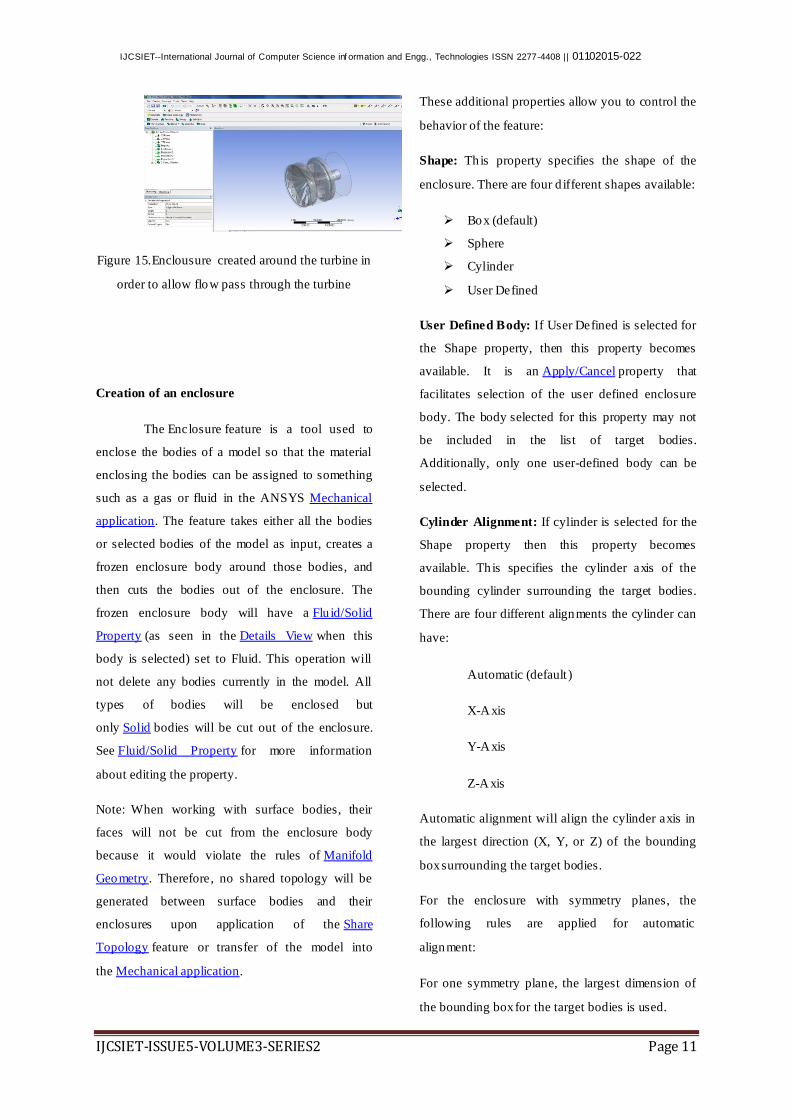
Figure 15.Enclousure created around the turbine in
order to allow flow pass through the turbine
Creation of an enclosure
The Enclosure feature is a tool used to
enclose the bodies of a model so that the material
enclosing the bodies can be assigned to something
such as a gas or fluid in the ANSYS Mechanical
application. The feature takes either all the bodies
or selected bodies of the model as input, creates a
frozen enclosure body around those bodies, and
then cuts the bodies out of the enclosure. The
frozen enclosure body will have a Flu id/Solid
Property (as seen in the Details View when this
body is selected) set to Fluid. This operation will
not delete any bodies currently in the model. All
types of bodies will be enclosed but
only Solid bodies will be cut out of the enclosure.
See Fluid/Solid Property for more information
about editing the property.
Note: When working with surface bodies, their
faces will not be cut from the enclosure body
because it would violate the rules of Manifold
Geometry. Therefore, no shared topology will be
generated between surface bodies and their
enclosures upon application of the Share
Topology feature or transfer of the model into
the Mechanical application.
These additional properties allow you to control the
behavior of the feature:
Shape: Th is property specifies the shape of the
enclosure. There are four d ifferent shapes available:
Box (default)
Sphere
Cylinder
User Defined
User Defined Body: If User Defined is selected for
the Shape property, then this property becomes
available. It is an Apply/Cancel property that
facilitates selection of the user defined enclosure
body. The body selected for this property may not
be included in the list of target bodies.
Additionally, only one user-defined body can be
selected.
Cylinder Alignment: If cylinder is selected for the
Shape property then this property becomes
available. Th is specifies the cylinder axis of the
bounding cylinder surrounding the target bodies.
There are four different alignments the cylinder can
have:
Automatic (default )
X-Axis
Y-Axis
Z-Axis
Automatic alignment will align the cylinder axis in
the largest direction (X, Y, or Z) of the bounding
box surrounding the target bodies.
For the enclosure with symmetry planes, the
following rules are applied for automatic
alignment:
For one symmetry plane, the largest dimension of
the bounding box for the target bodies is used.

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 12
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
For two symmetry planes, the intersection of the
two symmetry planes is used.
For three symmetry planes, the intersection of the
first two symmetry planes is used.
Number of Planes: This property defines how
many symmetry planes are used in the enclosure.
The default value is 0.
Symmetry Plane1: first symmetry plane selection
Symmetry Plane2: second symmetry plane
selection
Symmetry Plane3: third symmetry p lane selection
Model Type: Th is property specifies either Full
Model or Partial Model as input for the enclosure
with symmetry planes:
Cushion: The cushion property specifies the
distance between the model and the outside of the
enclosure body. The enclosure is initially
calculated to be just big enough to fit the model,
and then the cushion value is applied to make the
enclosure larger. The cushion is set to a default
value and must be greater than zero.
Full Model: ANSYS Design Modeler will use the
chosen symmetry planes to cut the full model,
leaving only the symmetrical portion. For each
symmetry plane, material on the positive side of the
plane (that is, the +Z direction) is kept, while
material on the negative side is cut away.
Partial Model: Since the model has already been
reduced to its symmetrical portion, Design Modeler
will automat ically determine on which side of the
symmetry planes the material lies.
Note: At ANSYS release 12.1, the distance
specified by the cushion property has increased
from 500m to 500Km when the large model
support option is enabled.
Cushion values for Box or Cylinder type enclosures
can be either Uniform or Non-Uniform. Non-
Uniform type accepts different values for X, Y and
Z directions for the Box dimension. Similarly
Cylinder Enclosure takes the cushion values for
radius, positive and negative reference directions.
This property is available for all enclosure shapes
except User Defined. This property may also be set
as a design parameter.
The bounding box calculat ion for the model used in
the Enclosure feature is guaranteed to contain the
model (or selected bodies). While the computed
bounding box is usually very close to the
minimum-bounding box, it is not guaranteed.
Target Bodies: Th is property specifies whether all
of the bodies or only selected bodies of the model
will be enclosed. The default is All Bodies.
Bodies: If Target Bodies is set to Selected Bodies
then this property becomes available. It is
an Apply/Cancel button property that facilitates
selection of the target bodies that you wish to be
enclosed. None of the bodies selected for this
property can also be selected as the user-defined
body.
Merge Parts : Th is property specifies whether or
not the enclosure and its target bodies will be
merged together to form a part. It is only available
during feature creation or while performing Edit
Selections. If Yes, the enclosure body (or bodies)
and all target bodies will be merged into a single
part. Only Solid bodies are considered when
merging parts - line and Surface bodies will not be
merged. If the property is set to no, then no attempt
is made to group the bodies into the same part, nor
is any attempt made to undo any groupings
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 13
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
previously performed. The Merge Parts property is
set to no by default, and will automatically be set to
no after each Merge Parts operation.
Creating Boundary Conditions Using Named
Selection
To create a Named Select ion in:
1. Go to the ANSYS tab (after installing the
Workbench CAD interface)
2. Click on the “NS Manager” in the -
ANSYS ribbon
3. Select the entities to name, hit [OK]
4. Enter a name (keep in mind that you can
use a filter prefix such as the default “NS_”
if you don‟t want all your publicat ions to be
seen as Named Select ions in Workbench,
hit [OK].
5. The new named selection is added to the
“ANSYS Named Selection Manager” in ,
hit [Close]
Figure 16.In let Boundary named on the Turbine
Meshing:
Mesh generation is one of the most critical
aspects of engineering simulation. Too many cells
may result in long solver runs, and too few may
lead to inaccurate results. ANSYS Meshing
technology provides a means to balance these
requirements and obtain the right mesh for each
simulation in the most automated way possible.
ANSYS Meshing technology has been built on the
strengths of stand-alone, class-leading meshing
tools. The strongest aspects of these separate tools
have been brought together in a single environment
to produce some of the most powerful meshing
available.
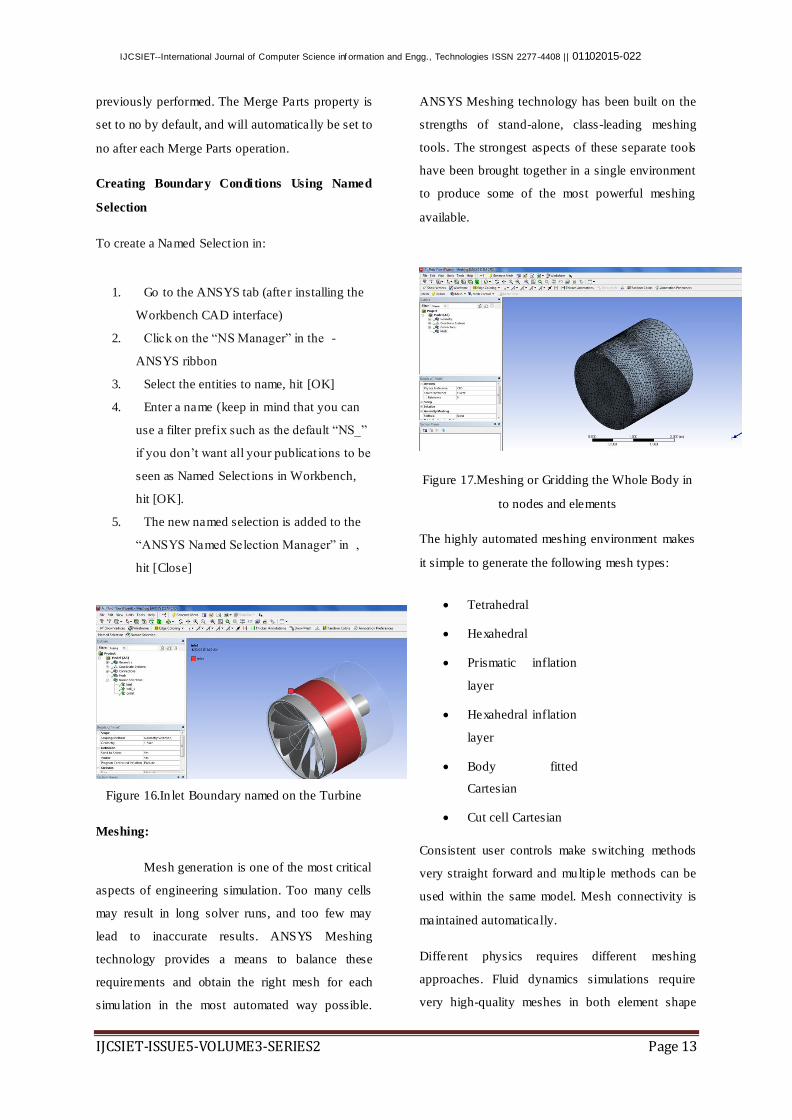
Figure 17.Meshing or Gridding the Whole Body in
to nodes and elements
The highly automated meshing environment makes
it simple to generate the following mesh types:
Tetrahedral
Hexahedral
Prismatic inflation
layer
Hexahedral inflation
layer
Body fitted
Cartesian
Cut cell Cartesian
Consistent user controls make switching methods
very straight forward and multip le methods can be
used within the same model. Mesh connectivity is
maintained automatically.
Different physics requires different meshing
approaches. Fluid dynamics simulations require
very high-quality meshes in both element shape

IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 14
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
and smoothness of sizes changes. Structural
mechanics simulat ions need to use the mesh
efficiently as run times can be impaired with high
element counts. ANSYS Meshing has a physics
preference setting ensuring the right mesh for each
simulation.
Figure 18. Meshing of High Speed Turbine
Contacts:
Types of Contacts in ANS YS
This post focuses on quick overview of
types of contacts to help select a particular type of
contact for your analysis. While working on
assemblies, the first question would be whether or
not the contact stresses are important. If not, then
we can just „bond‟ the surfaces together and can
have coarse mesh and be done with it. But if
contact stresses are important and more over
surfaces are opening and closing then we need to
look more into other types (NL) of contacts and
finer meshing techniques. The following types are
available in ANSYS Mechanical.
1. Bonded
2. No Separation
3. Rough
4. Frict ionless
5. Frict ional
Note that Rough, Frict ionless and Frictional
contacts are always considered as nonlinear
contacts. If you have any one of these contacts, you
can go to solution branch --> advanced settings and
check the analysis type. It would be Non Linear
and grayed out.
1. Bonded: Both surfaces are bonded like glue.
They are not allowed to separate. Not allowed to
Slide. Surfaces will be together irrespective of –
gap, penetration, loading and behavior of other
parts/ contacts. We always have some tolerance in
our designs. For example you may have five
thousands of gaps between two parts. But if you do
not want to move those parts with respect to each
other, you can use bonded contact. It DOES NOT
matter how much is the gap, if you don‟t want to
have relative motion between the two, use bonded
contact – Just make sure you have „pinball radius‟
more than the gap.
Pinball Region: This is a default and linear type of
contact. It would have the least solution time than
any other contact type. If you have set up ANSYS
Mechanical to detect contacts on geometry import,
you would see bonded contacts are already present
(you can change that) wherever there are gaps
between two parts. And specifying this contact
basically tells ANSYS to ignore those gaps. This is
very handy type of contact. If you have trouble
converging solution with any of the NL contacts,
you can try Bonded or No Separation to
troubleshoot the model.
2. No Separation: Similar to Bonded contact
except that surfaces are allowed to slide a little bit.
That means relative motion between the surfaces is
allowed. Use it when you are sure that the loading
would always be such that surfaces will not
separate. Note that sliding allowed is frictionless
but sliding is very limited.
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 15
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
3. Rough: Surfaces are allowed to separate
depending on loading but cannot slide (Mu =
infinity).
4. Frictionless: Surfaces are allowed to slide freely
(Mu = 0) and contact can open and close depending
on the loading. Under constrained models may give
rig id body error. Not only in this one but any NL
contact which are allowed to separate.
5. Frictional: Surfaces are allowed to slide by user
defined coefficient of friction (Mu = user defined)
and can open and close. This is real like having two
surfaces sliding against each other. Slid ing will
occur after the threshold resistance value of shear
stress depending on the Mu. ) 0.2 is considered as
the „magic number‟ in FEA world. Any Mu below
this value would converge easily. That has to do
with use of Unsymmetrical Eigen solver like
Lanczos which is covered in another post.
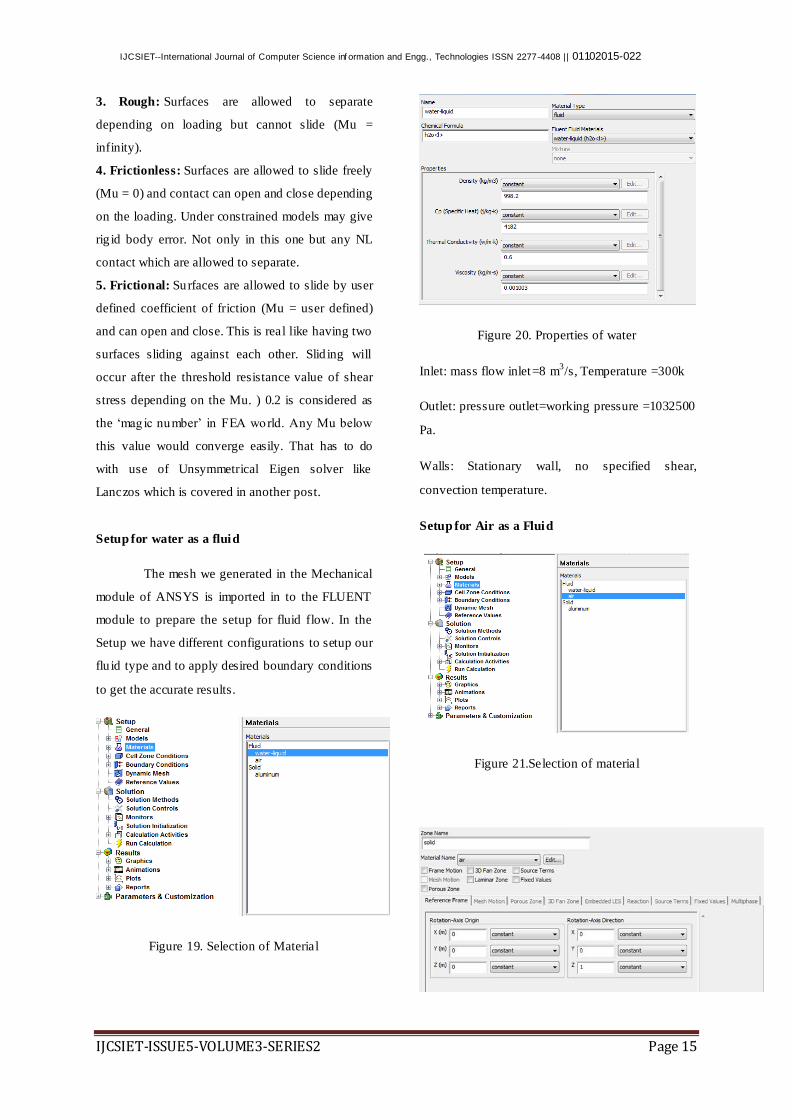
Setup for water as a fluid
The mesh we generated in the Mechanical
module of ANSYS is imported in to the FLUENT
module to prepare the setup for fluid flow. In the
Setup we have different configurations to setup our
flu id type and to apply desired boundary conditions
to get the accurate results.
Figure 19. Selection of Material
Figure 20. Properties of water
Inlet: mass flow inlet=8 m3/s, Temperature =300k
Outlet: pressure outlet=working pressure =1032500
Pa.
Walls: Stationary wall, no specified shear,
convection temperature.
Setup for Air as a Fluid
Figure 21.Selection of material
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 16
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
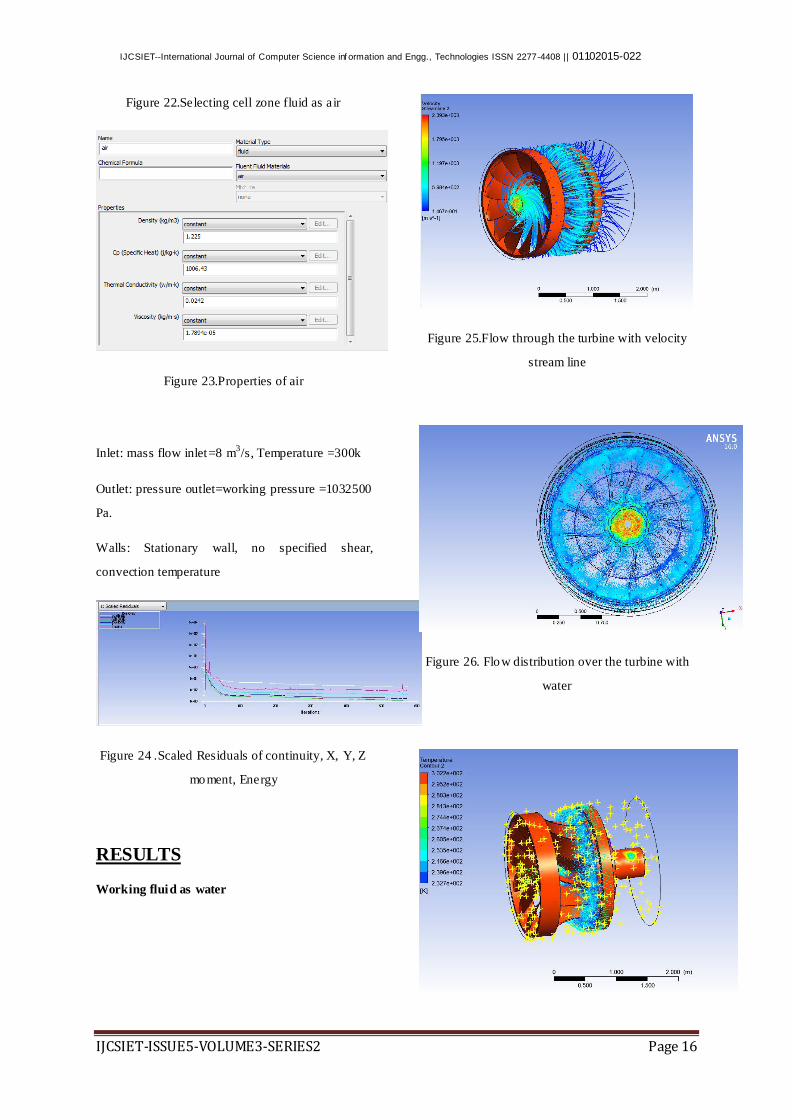
Figure 22.Selecting cell zone fluid as air
Figure 23.Properties of air
Inlet: mass flow inlet=8 m3/s, Temperature =300k
Outlet: pressure outlet=working pressure =1032500
Pa.
Walls: Stationary wall, no specified shear,
convection temperature
Figure 24 .Scaled Residuals of continuity, X, Y, Z
moment, Energy
RESULTS
Working fluid as water
Figure 25.Flow through the turbine with velocity
stream line
Figure 26. Flow distribution over the turbine with
water
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 17
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
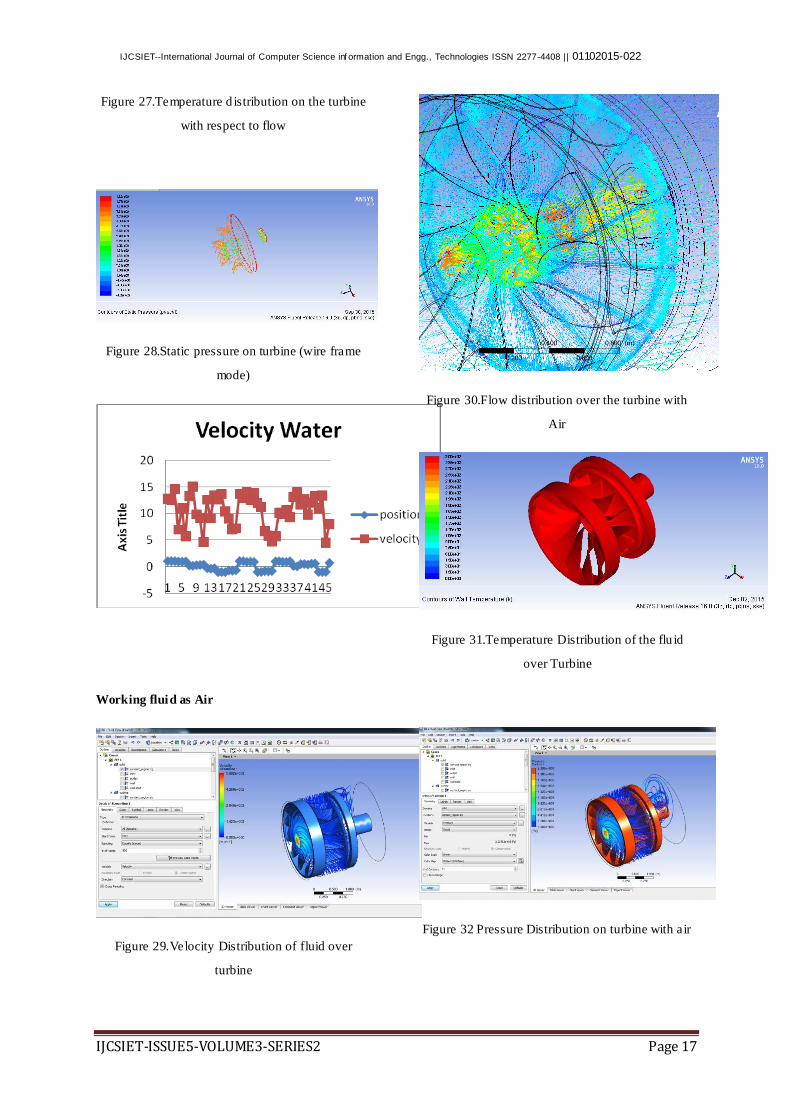
Figure 27.Temperature d istribution on the turbine
with respect to flow
Figure 28.Static pressure on turbine (wire frame
mode)
Working fluid as Air
Figure 29.Velocity Distribution of fluid over
turbine
Figure 30.Flow distribution over the turbine with
Air
Figure 31.Temperature Distribution of the flu id
over Turbine
Figure 32 Pressure Distribution on turbine with air
IJCSIET-ISSUE5-VOLUME3-SERIES2 Page 18
IJCSIET--International Journal of Computer Science inf ormation and Engg., Technologies ISSN 2277-4408 || 01102015-022
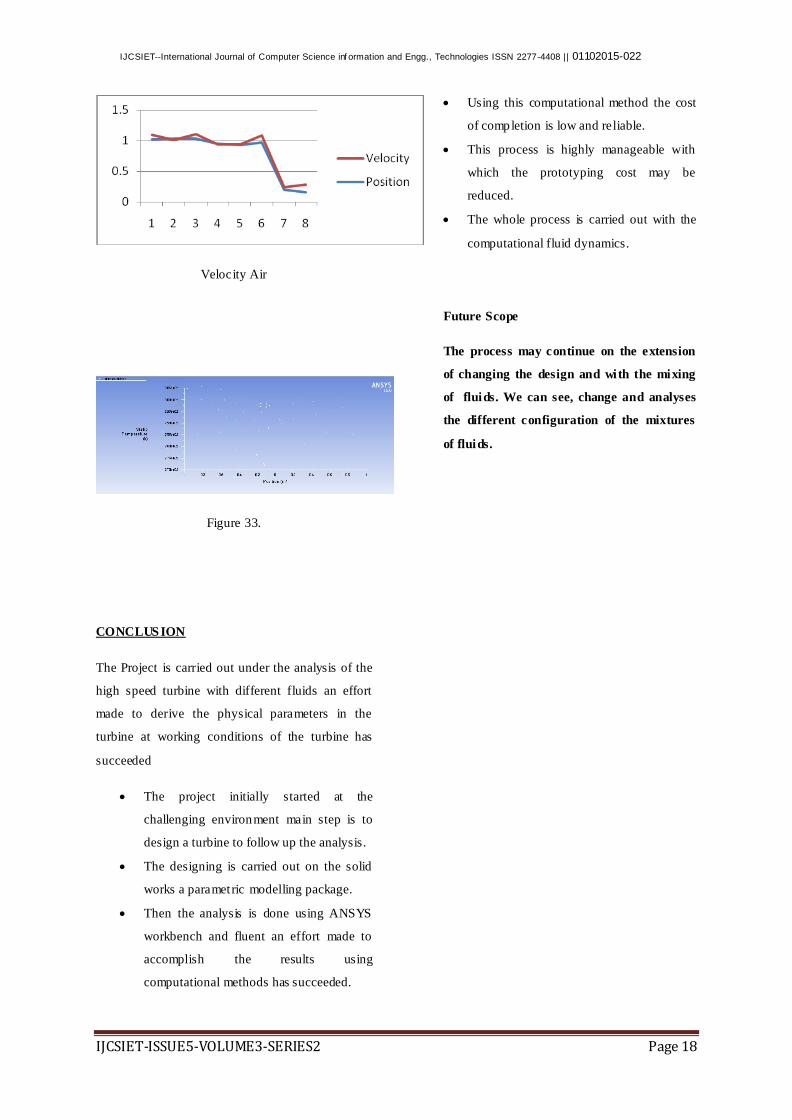
Velocity Air
Figure 33.
CONCLUS ION
The Project is carried out under the analysis of the
high speed turbine with different fluids an effort
made to derive the physical parameters in the
turbine at working conditions of the turbine has
succeeded
The project initially started at the
challenging environment main step is to
design a turbine to follow up the analysis.
The designing is carried out on the solid
works a parametric modelling package.
Then the analysis is done using ANSYS
workbench and fluent an effort made to
accomplish the results using
computational methods has succeeded.
Using this computational method the cost
of completion is low and reliable.
This process is highly manageable with
which the prototyping cost may be
reduced.
The whole process is carried out with the
computational fluid dynamics.
Future Scope
The process may continue on the extension
of changing the design and with the mixing
of fluids. We can see, change and analyses
the different configuration of the mixtures
of fluids.





























