Embed Size (px)
Citation preview
Analysis of Imaging Radar Algorithms for the Identification of Targets by Their Surface Shape
Sebastian Hantscher,Alexander Reisenzahn, Christian G. Diskus
Institut für MikroelektronikJohannes Kepler Universität Linz

Inhalt1.1. 22
1. Einleitung
2. Messgeräte und -aufbau
3. Exploding Reflector Model
4. Bildgebende Algorithmen4.1 Hyperbelsummation4.2 Phaseshift-Migration4.3 Stolt-Migration4.4 Inverse Boundary Scattering Transform
5. Zusammenfassung / Ausblick
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
Einleitung1.1. 33UWB Radarsysteme
+ hohe Bandbreite kurze Pulsdauer (hohe Auflösung)+ Fähigkeit, dielektrische Materialien zu durchdringen
• Bodenradar• wanddurchdringendes Radar• kontaktlose Materialprüfung
Herausforderung: Identifikation der detektierten Objekte
Parametrische Modelle: • z. B. RCS-Schätzungen
Nichtparametrische Modelle : • inverse Algorithmen zur Untersuchungen des Streu-verhaltens, basierend auf der Wellenausbreitung(Maxwell-Gleichungen.)• bildgebende Algorithmen ⇒ Formschätzung
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

2.2. 44Messgeräte und -aufbau
1. Einleitung
2. Messgeräte und -aufbau
3. Exploding Reflector Model
4. Bildgebende Algorithmen4.1 Hyperbelsummation4.2 Phaseshift-Migration4.3 Stolt-Migration4.4 Inverse Boundary Scattering Transform
5. Zusammenfassung / Ausblick
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
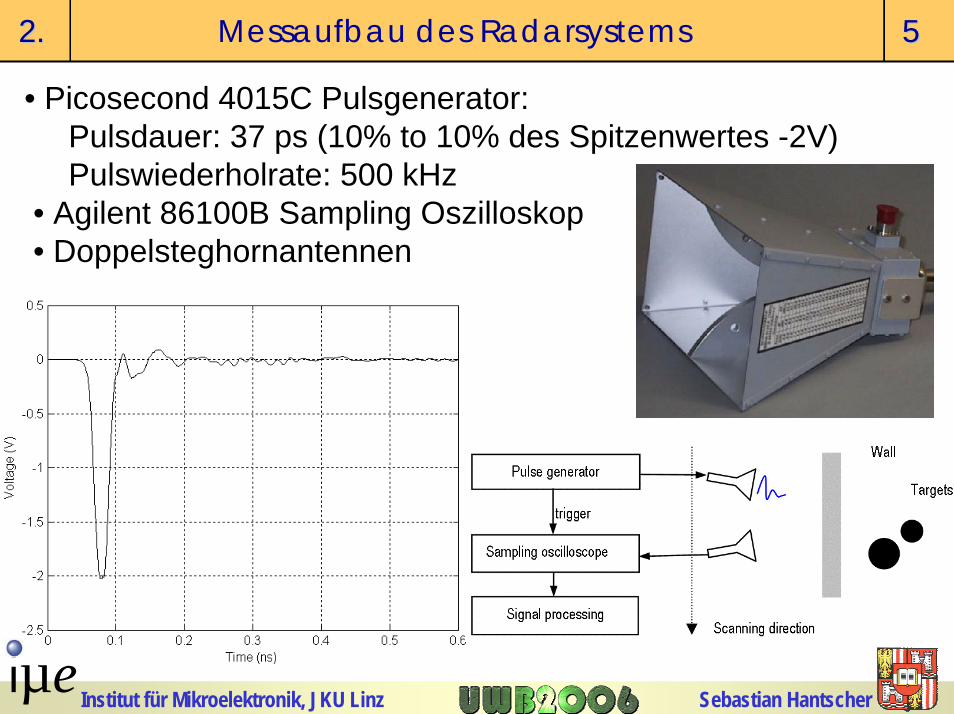
Messaufbau des Radarsystems2.2. 55
• Picosecond 4015C Pulsgenerator: Pulsdauer: 37 ps (10% to 10% des Spitzenwertes -2V)Pulswiederholrate: 500 kHz
• Agilent 86100B Sampling Oszilloskop • Doppelsteghornantennen
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

3.3. 66Exploding Reflector Model (ERM)
1. Einleitung
2. Messgeräte und -aufbau
3. Exploding Reflector Model
4. Bildgebende Algorithmen4.1 Hyperbelsummation4.2 Phaseshift-Migration4.3 Stolt-Migration4.4 Inverse Boundary Scattering Transform
5. Zusammenfassung / Ausblick
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

Exploding Reflector Model (ERM)3.3. 77
( )tzau f ,, 0=
a1 a2 a3 a4 a5 a1 a2 a3 a4 a5
Gemessene Reflexionen:
Gedankenexperiment:• Anstatt der Antenne symbolisiert das Zielobjekt die Quelle• Das Zielobjekt “explodiert“ bei t=0, daher der Name• Wellenausbreitung ( ) ( ) ( ) 0,,1,,,,
2
2
22
2
2
2=
∂
∂−
∂
∂+
∂
∂
ttzxu
vztzxu
xtzxu
Ziel: Finden einer Lösung der Wellengleichung mit der Randbedingung
( )0,, =tzxu( )tzau f ,, 0=
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
4.4. 88Bildgebende Algorithmen
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
1. Einleitung
2. Messgeräte und -aufbau
3. Exploding Reflector Model
4. Bildgebende Algorithmen4.1 Hyperbelsummation4.2 Phaseshift-Migration4.3 Stolt-Migration4.4 Inverse Boundary Scattering Transform
5. Zusammenfassung / Ausblick

Hyperbelsummation4.14.1 99
Annahmen: • Ziele werden als Punktreflektoren modelliert• Wellenausbreitung durch optische Ausbreitungersetzt
( ) ( )∑∑= = ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+−−⋅=
P
i
T
nLaufzeit
nTargetnTargetin yxac
tptxD1 1
2,
2,
2,44444 344444 21
σB-Scan:
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.14.1 1010
( ) ( )∑=
⎟⎠⎞
⎜⎝⎛ +−=
F
fmkffmf zxa
caDzaO
1
222,,
Berechnung der theoretischen Hyperbel für jeden BildpunktSummation über alle Antennenpositionen
(langsam)
Zielobjekt
Punktstreuer
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
Hyperbelsummation

Phaseshift-Migration4.24.2 1111
( ) ( ) ( ) 012
2
22
2
2
2
=∂
∂−
∂∂
+∂
∂t
tzxuvz
tzxux
tzxu ,,,,,,Startpunkt:( )0=tzau f ,,
Lösung
( ) ( ) ( )x
xktfjx dkdfefzkUtzxu x ⋅−⋅
+∞
∞−
+∞
∞−
⋅= ∫ ∫ π2,,,,ftkx x
→
→
( ) ( ) ( ) ( ) ( ) ( ) ( ) 022 2
0
2
2
2
22 =⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
∂∂
+−= ∫ ∫∞+
∞−
∞+
∞−
⋅−⋅
=
xxktfj
xx
xx dkdfefzkUv
fz
fzkUfzkUktzxu xπππ4444444444 34444444444 21
:
,,,,,,,,
Eingesetzt in die Wellengleichung liefert
( ) ( ) ( ) 022 22
2
2
=⋅⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛+
∂∂ fzkUk
vf
zfzkU
xxx ,,,, ππ
Faktorisierung
( ) ( ) ( ) 02222 22
22
=⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛+
∂∂
⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛−
∂∂ fzkUk
vfj
zk
vfj
z xxx ,,ππππ
Upgoing Wellengl. Downgoing Wellengl.
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.24.2 1212Phaseshift-Migration
( )Lösung upgoing Wellengl. ( ) ( ) 0,,22,, 22
=⋅−⎟⎠⎞
⎜⎝⎛−
∂∂ fzkUk
vfj
zfzkU
xxx ππ
( ) ( )( ) zk
vfj
xx
x
efzkUfzkU⋅−⎟
⎠⎞
⎜⎝⎛
⋅==2
2
220
ππ
4434421,,,,
Randbedingung bei z=0: B-Scanlautet
Lösung eingesetzt in ( ) ( ) ( )x
xktfjx dkdfefzkUtzxu x ⋅−⋅
+∞
∞−
+∞
∞−
⋅= ∫ ∫ π2,,,,
( ) ( )( )
xxkj
zkvfj
x dkdfeefzkUtzxu x
zkj
x ⋅−∞+
∞−
∞+
∞−
⋅−⎟⎠⎞
⎜⎝⎛
⋅⋅=== ∫ ∫ πππ
π
222
2
22
00
4444 84444 76
,,,,mit t=0 (ERM)
Für den Fall eines inhomogenen dielektrischen Verlaufs ( )zcv
rε⋅=
2
( ) ( )( ) ( )
xxkj
dzkzcfj
x dkdfeefzkUtzxu xxr ⋅−
∞+
∞−
∞+
∞−
−⎟⎠⎞
⎜⎝⎛
⋅∫
⋅=== ∫ ∫ ππεπ
2222 2
2
00 ,,,,
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.24.2 1313Implementierung der Phaseshift-Migration
zzz tt ∆+=+1( ) zk
vfj x
e⋅−⎟
⎠⎞
⎜⎝⎛
⋅2
2
22 ππ
( ) ( )( )
xxkj
zkvfj
x dkdfeefzkUtzxu xx ⋅−
∞+
∞−
∞+
∞−
⋅−⎟⎠⎞
⎜⎝⎛
⋅⋅=== ∫ ∫ πππ
222 2
2
,0,0,,
PhaseshiftOperator
( )fzkU x ,0, =
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
4.24.2 1414
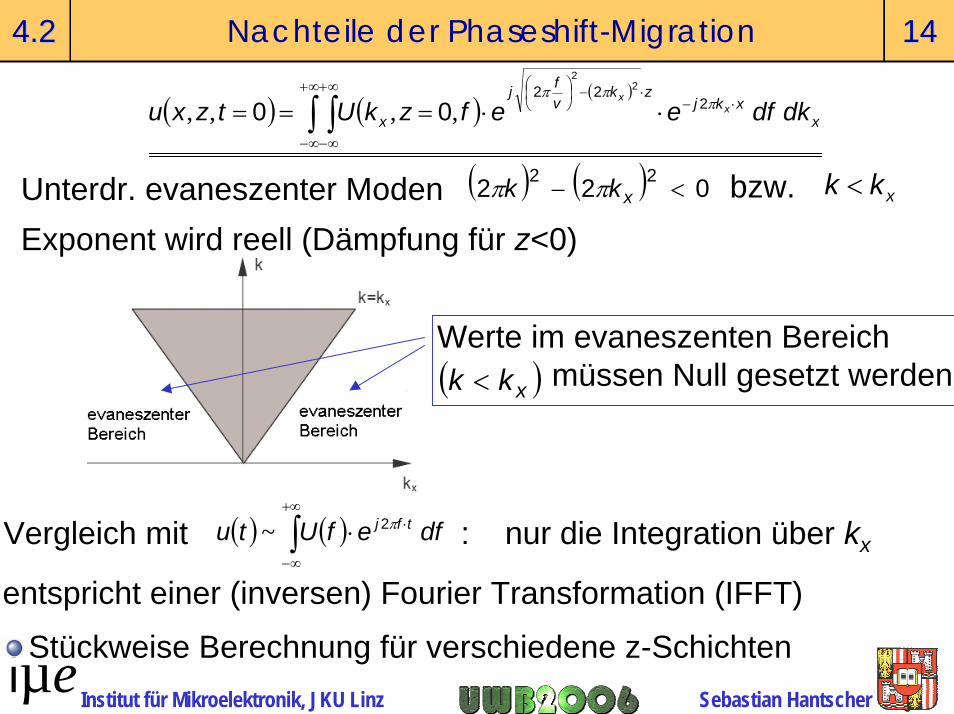
( ) ( ) dfefUtu tfj∫+∞
∞−
⋅⋅ π2~
entspricht einer (inversen) Fourier Transformation (IFFT)
( ) ( )( )
xxkj
zkvfj
x dkdfeefzkUtzxu xx ⋅−
∞+
∞−
∞+
∞−
⋅−⎟⎠⎞
⎜⎝⎛
⋅⋅=== ∫ ∫ πππ
222 2
2
00 ,,,,
Unterdr. evaneszenter Moden
: nur die Integration über kxVergleich mit
( ) ( ) 022 22 <− xkk ππ xkk <bzw.Exponent wird reell (Dämpfung für z<0)
Werte im evaneszenten Bereich müssen Null gesetzt werden!( )xkk <
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
Nachteile der Phaseshift-Migration
Stückweise Berechnung für verschiedene z-Schichten

Stolt-Migration4.34.3 1515
Variablentransformation von f zu kz mit den Substitutionen
zzx
z dkv
kk
kdfπ222
⋅+
=ππ 22
22 vkkvkf zx ⋅+=⋅
= and
( ) ( ) xxkjzkj
x dkdfeefzkUtzxu xz ⋅−+∞
∞−
+∞
∞−
⋅ ⋅⋅=== ∫ ∫ ππ 22,0,0,,Eingesetzt in
( ) ( ) xzxkjzkj
zx
zzx dkdkee
kk
kvkzkUtzxu xz ⋅−+∞
∞−
+∞
∞−
⋅ ⋅⋅+
⋅⋅=== ∫ ∫ ππ
π
22
222,0,0,,ergibt
Vorteil: Beide Integrale könne mit der IFFT berechnet werden(geringere Rechenzeit im Vergleich zur Phaseshift-Mig.)
Nachteil: Geschwindigkeitsprofile (GPR-Anwendungen) können nicht mehr berücksichtigt werden (kz)
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
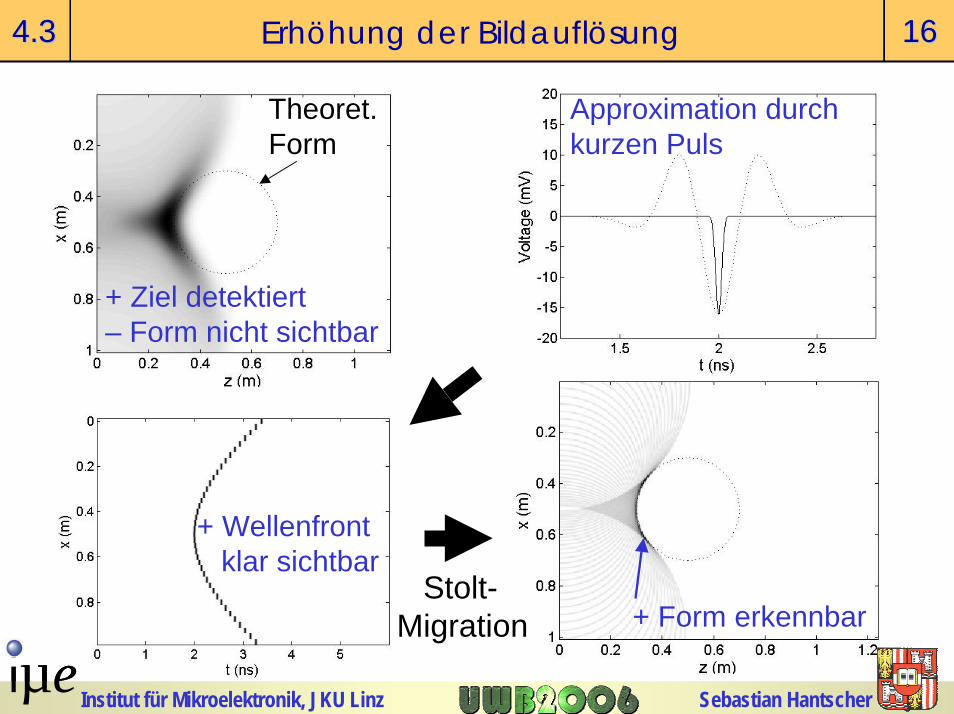
4.34.3 1616Erhöhung der Bildauflösung
Approximation durch kurzen Puls
iµe
Theoret.Form
+ Ziel detektiert– Form nicht sichtbar
Stolt-Migration
+ Wellenfrontklar sichtbar
+ Form erkennbar
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.34.3 1717Weiterer Nachteil: Messung zweier Zylinder
- Überlappende Pulse er-zeugen Artefakte
- so nicht anwendbar für dieIdentifizierung mehrerer Ziele
Auflösungs-erhöhung
ÜberlappendeWellenfronten
Artefakte
Fehlstellen
Stoltmigration
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

Boundary Scattering Transform4.44.4 1818
Transformation der Form des Ziels z=f(x) in die Wellenfronten• Monostatische Konfiguration
⇒ Reflexion tritt nur dann auf, wenn die Ausbreitungsrichtungder Welle senkrecht auf die Oberfläche des Ziels trifft
• Omnidirektionale Antenne
( )( ) ( )⎪⎩
⎪⎨⎧
+⋅=
⋅+=21 dxdzzxz
dxdzzxxx
w
w
lxxw +=
zl
=ϕtan dxdz=ϕtanund dxdzzl ⋅=ergibt
( )2222 dxdzzzlzzw ⋅+=+=
Laufzeit ~ Abstand (Antenne, Zielobjekt)
Antennenposition
Abstand
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.44.4 1919Inverse Boundary Scattering Transform (IBST)
Wellenfront Form des Ziels
Abstand zum Ziel ~ gemessenen Laufzeit (bekannt)Richtung des Echos (unbekannt)Daher muss für jede Antennenposition M das Ziel auf einem Kreis mit dem Radius R liegen, z.B. Verallgemeinert( ) 222
ww yyxx =+−
( ) 21
221 RyMx =+−
( ) ( ) 0,, 222 =−+−= wwwx zzxxzzxFw
oder
Die Einhüllende dieser Kreise beschriebt die Form des Ziels!
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

4.44.4 2020Inverse Boundary Scattering Transform (IBST)
( ) ( ) 022,,
=⋅−−−=∂
∂
w
www
w
wx
dxdzzxx
xzzxF
w
Berechnung der Einhüllende mit Hilfe der ersten (partiellen)Ableitung nach dem Parameter xw
Aufgelöst nach x
wwww dxdzzxx ⋅−=
Und eingesetzt in die Kreisschar
( )21 www dxdzzz −⋅=
( )( ) ( )⎪⎩
⎪⎨⎧
−⋅=
⋅−=21 wwww
wwwww
dxdzzxz
dxdzzxxxWellenfronten → Form
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
Zusammenfassung / Ausblick5.5. 2121
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
1. Einleitung
2. Messgeräte und -aufbau
3. Exploding Reflector Model
4. Bildgebende Algorithmen4.1 Hyperbelsummation4.2 Phaseshift-Migration4.3 Stolt-Migration4.4 Inverse Boundary Scattering Transform
5. Zusammenfassung / Ausblick
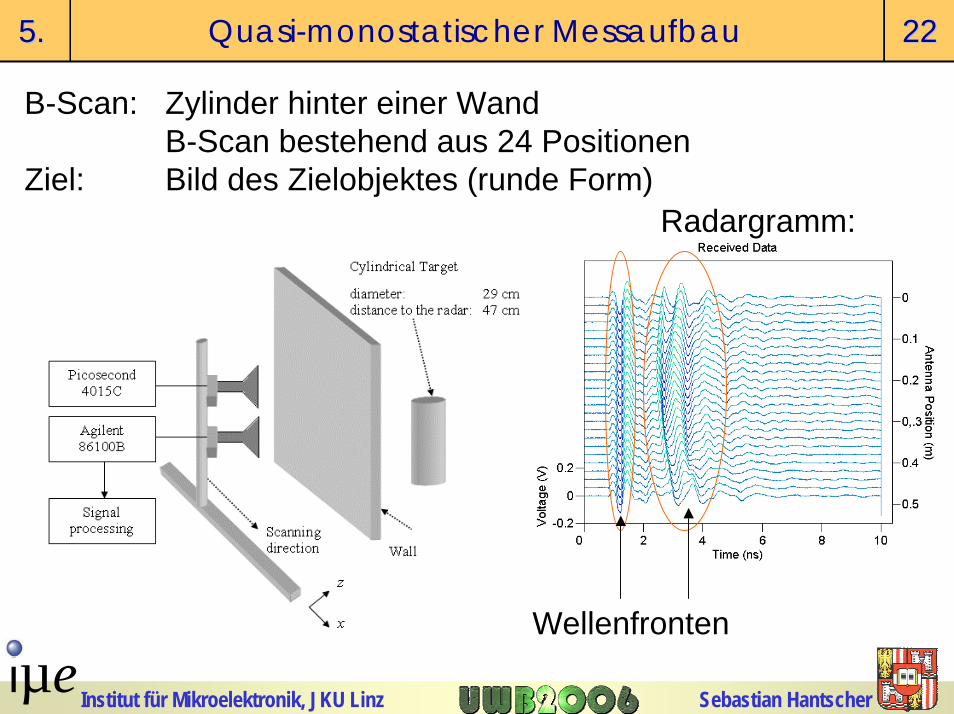
Quasi-monostatischer Messaufbau5.5. 2222
B-Scan: Zylinder hinter einer WandB-Scan bestehend aus 24 Positionen
Ziel: Bild des Zielobjektes (runde Form)
Wellenfronten
Radargramm:
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
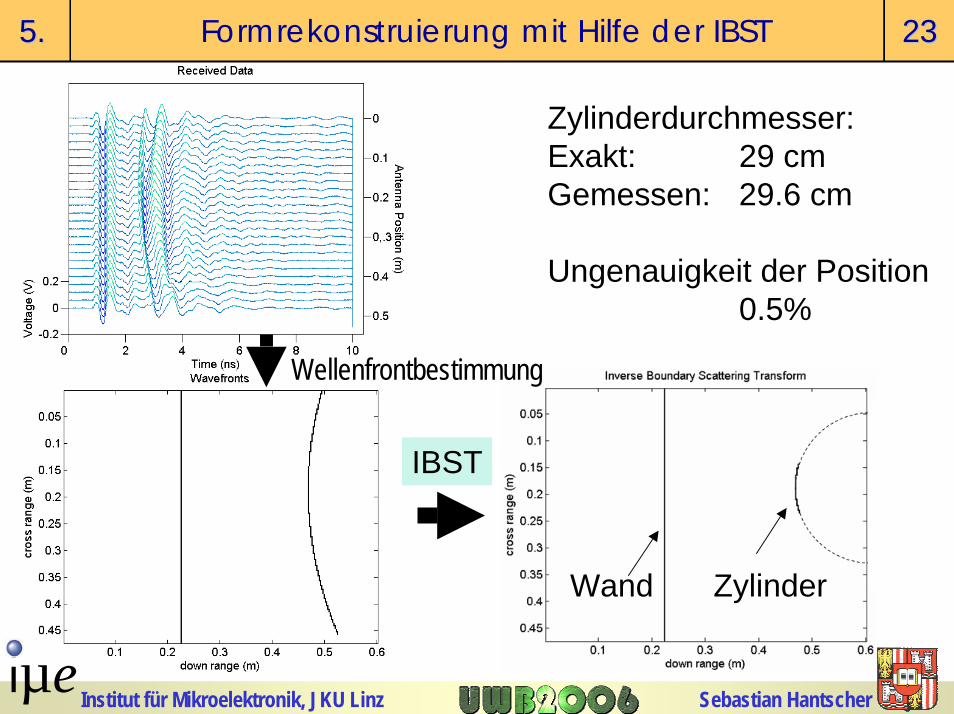
Formrekonstruierung mit Hilfe der IBST5.5. 2323
Zylinderdurchmesser: Exakt: 29 cmGemessen: 29.6 cm
Ungenauigkeit der Position0.5%
IBST
Wellenfrontbestimmung
Wand Zylinder
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

cros
s ra
nge
(m)
down range (m)
Kirchhoff Migration
0.1 0.2 0.3 0.4 0.5 0.6
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
S tolt Migration
down range (m)
cros
s ra
nge
(m)
0 0.1 0.2 0.3 0.4 0.5 0.6
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
5.5. 2424
Zeit: 45s
Zeit: 3s Zeit: 0.3s
Hyp. summation
Stolt-Migration
Zeit: 35s
Phaseshift-Migration
IBST
Vergleich der Algorithmen
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

5.5. 2525Vergleich der AlgorithmenHyperbelsummation
+ sehr einfacher Ansatz– hohe Rechenzeit aufgrund von zwei Summationen– Erhöhung der Auflösung notwendig
Phase Shift Migration+ nur eine Summation, eine Anwendung der FFT+ einfach zu implementierende -Profile– Erhöhung der Auflösung notwendig
Stolt migration+ FFT-basierter Algorithmus (zweidim.) ohne Summation– -Profile nicht implementierbar – Erhöhung der Auflösung notwendig
Inverse Boundary Scattering Transform+ Formrekonstruktion (direkte Auswertung der Wellenfronten)+ geringe Rechenzeit (massive Datenreduktion)+ keine Artefakte wegen überlappenden Echos– eng benachbarte Objekte: Wellenfronten schwer zu finden
Institute for Microelectronics, JKU Linz Sebastian Hantscheriµe Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe
rε
rε

Ausblick5.5. 2626
+ UWB Radarsysteme geeignet zur Detektion verborgener Objekte
+ IBST erfolgreich angewandt zur Formrekonstruktion⇒ geeignet zur Zielidentifizierung
+ Geringe Rechenzeit bei Anwendung der IBST
– Bei Überlagerung von Echos sind die Wellenfronten schwer zu finden
⇒ Entwicklung von Algorithmen zur Wellenfrontdetektion⇒ Erweiterung für 3D-Anwendungen
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe

2727
Besten Dank für Ihre Aufmerksamkeit!
Institut für MikroelektronikJohannes Kepler Universität Linz
Institut für Mikroelektronik, JKU Linz Sebastian Hantscheriµe