-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
1/6
Analysis of the effectiveness
of shovel-truck mining systems
S Yuan and R.L. Grayson
Abstract
stochastic model or evaluating the impact
of the reliability and maintainability of shovels and trucks
on
the operational effective ness of shovel-truck mining
systems
is presented. In the mo del , the Marko v modeling tech
nique
is used to analyze the operating status of a sho vel-truck
mining system. Th en , simulation is used to study the
produc-
tivity of a shovel-truck system in a particular state. Fina
lly,
the relationship between the effectiveness of a shovel-truck
system in terms of productivity and the reliability and
main-
tainability of equipment is established. Th is relationship
may be very useful to mine managers in making decisions in
surface mining e . g . , egarding production process
control,
equipment replacement, andma intenanceplanning . quan-
titative study is given to demonstrate h ow the reliability
and
maintainability of equipment affect the system effectiven
ess
and ho w to pinpoint the parameter that has the most
signifi-
cant effect on the system effectiveness. The
quanrirarivestudy
indicated that in order to improve the system effectiveness
significantly, the reliability and maintainability of the equip
-
ment need to be improved simultaneously.
reliability, maintainability and availability were given in
a
detailed manner. Case studies were used to study the impacts
of
longwall equipment, geological conditions and outby haulage
on system reliability and availability. Topuz and Duan
(1991)
applied the reliability concept and Markov modeling to study
the
reliability and effectiveness of a continuous mining system.
From an operational point of view, a shovel-truck mining
system in surface mining is more complicated than either a
longwall system or a continuous mining system in under-
ground mining. Even though extensive research work has
been conducted to analyze shovel-truck operations, not much
of the work considers the impact of reliability and
maintain-
ability of the shovels and trucks on the productivity of the
system. Therefore, this paper evaluates the effectiveness of
the shovel-truck system in terms of productivity by studying
the relationship between productivity and the reliability
and
maintainability of shovels and trucks. The approach and
results may be helpful to mine operators in controlling the
production process, planning equipment maintenance poli-
cies, and for making other possible decisions.
Introduction
Reliability maintainability and system effectiveness
Shovel-truckoperations continue tobe the most popular form
of material handling operations in surface mining since they
often offer many operational advantages. The haulage cost is
the
largest component of the operating cost of an open pit mine,
in
some cases accounting for about 50 of the operating cost.
From an equipment design point of view,
shovel-truckoperating
economics can be improved by increasing the shovel and truck
capacities, or by enhancing equipment reliability and
perfor-
mance. From a mining-system design perspective, a good mine
layout, an optimal mining sequence, and utilization of
in-pit
crushers with conveyors can also improve operational econom-
ics. A close operational control of shovel-truck operations
is
another activity that can result in significant improvements
in
system efficiency and productivity. As a matter of fact,
exten-
sive studies have been conducted to analyze the effect of
various
truck allocation strategies (Kim and Ibarra, 1981; Lizotte
and
Bonates, 1987; Luo and Lin, 1988; Tu and Hucka, 1985; White
and Olson, 1986). Another factor that can affect the
productivity
of a shovel-truck system is equipment availability. good
maintenance program can increase equipment availability and
so reduce the economic losses associated with unreliability.
Reliability theory has found some applications in mining
engineering. Ramani, Bhattacherjee and Pawlikowski
1
988)
applied the concept of reliability engineering o the evaluation
of
longwall system performance. In their paper, definitions of
Reliability is defined as the probability that a piece of
equipment successfully performs its intended function for a
given period of time under specified conditions (Martz and
Waller, 1982). The reliability of a piece of equipment is
usually measured in terms of mean time to failure (MTTF).
which is the expected time during which the equipment will
perform successfully. For a reparable item, mean time to
failure (MTTF) is also known as mean time between failures
(MTBF).
Maintainability is the probability that a system in a failed
state can be restored to its operational state within a
specified
time period when maintenance is performed. The maintain-
ability of a piece of equipment is usually measured in terms
of mean time to repair (MTTR), which is the expected time
for the system to be restored.
System effectiveness is defined as the probability that the
system can successfully meet an operational demand within
a given time period when operated under specified conditions
(Martz and Weller, 1982). It can be measured in different
terms such as reliability, availability, or productivity. In
this
paper, the system effectiveness is evaluated in terms of
productivity, which means the production of the system in a
time period (for instance, an hour or a shift).
Markov processes
S. Yuan
andR.L.
Grayson
members SME are research associate
A stochastic process is a collection of random variables
that
and dean and professorof rniningengineering espectively with
the
defined
n the same
probability 'pace
and indexed
by a
Department of Mining Engineering West Virginia University
real ~arameter(He~mannd Sobel, 1982). It is oftendenotedas
Morgantown WV. SME nonrneeting paper 92-324. Manuscript
X(t), t E T
1
where T is a set ofmmben that index the random
Nov. 16 1992. Discussion of this peer-reviewed and approved
paper
variables X(t). The index t is often interpreted as time, and
X(t)
is invited and must be submitted in duplicate prior to Oct. 31
1995.
is the value or the state of the process at time t.
TRANSACTIONSVOL. 296 1828
SOCIETY
FOR MINING METALLURGY AND
EXPLORATION
INC
-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
2/6
A stochastic process {X(t) , E TI is a Markov process or
a Markov chain if, for any positive integer n, time points to 0
and s > 0,
P{X(t+s)= j/X(t) = i ) is independent oft , then the Markov
chain is homogeneous or stationary.
A Markov chain is said to be irreducible if all states
communicate with each other. A state i is said to be
positive
recurrent if the probability that, starting in state i, the
process
will reenter state i equals one, and the expected time until
the
process returns to state i is finite. For an irreducible,
positive
recurrent, aperiodic Markov chain, the limiting probability
(Pj),which represents the long-run proportion of time that
the
Markov chain is in state j exists.
For a continuous-time Markov chain, the amount of time it
spends in a state before making a transition into a different
state
is exponentially distributed. Let v be the rate at which the
process makes a transition when in state
;
let q jbe the rate when
in state i, that the process makes a transition into state
;
and let
pi, be the probability that when in state i, this transition is
into
state j. If the process is an irreducible, positive
recurrent,
apbriodicMarkov chain, the limiting probability Pj)xists.
From Kolrnogorov's forward equation (Ross, 1989, p. 268):
obtain:
Or, preferably:
This equation shows that the rate at which the process
leaves
state j equals the rate at which the process enters state j.
odel development
Operating status of shovel truck systems
In a shovel-truck operating system, equipment is subject to
frequent failure, especially the trucks. Non-availability of
the
equipment can cause great production and economic losses. It
has been demonstrated that the times between failures and
the
repair times of trucks
are
exponentially distributed. And that
shovel repair times and the times between failures of a
shovel
could be represented by exponential distributions as well
(Tu
and Hucka, 1985). Therefore, Markov modeling can be used to
analyze the operating status of the system.
The following assumptions are made in the formulation of
the model:
The number of shovels and trucks are M and N respec-
tively.
The time between failures and repair time of a shovel
are exponentially distributed with sh and k h . respec-
tively. Thus:
1
MT F
=
Sh
Ash
where:
MTBFsh s the mean time between failures of a shovel, and
MTTRsh s the mean time to repair a shovel.
Generally, sh and k h are often considered as the failure
rate and the repair rate of a shovel, respectively.
The time between failures and the repair time of each
truck are exponentially distributed with &,and
h
espec-
tively. Similarly,
I
MTTR
=
tr
where:
MTBF,, is the mean time between failures of a truck, and
MTTR, is the mean time to repair a truck.
All the parameters (Ash,kh,
ht
and
hr
are stationary.
That is, they do not change with time. This assumption
may not be true for the entire life cycle of the equipment.
However, it is suitable, at least, for a period of time.
In the assumptions it is assumed that the reliability and
maintainability are identical for each piece of equipment.
In
the real world, this is not the situation.
However, if the
average reliability and the average maintainability of a
type
of equipment (shovel or truck) are used as the common
reliability and common maintainability for that type of
equip-
ment, the assumptions are reasonable for the stochastic
process defined below. That is because the m shovels and n
trucks in a state (m, n) can be any of the M shovels or the
N
trucks. These assumptions simplify the model to be devel-
oped next without loss of generality or applicability.
A continuous-time stochastic process can be defined as:
where m and n are the numbers of shovels and trucks
operating or operable in the system, respectively.
From the assumptions it is known that the times between
failures and the repair times of both shovels and trucks are
exponentially distributed. Therefore, the amount of time the
stochastic process spends in a state before making a
transition
SOCIETY FOR MINING. METALLURGY. AND EXPLORATION NC
TRANSACTIONS VOL. 296 1829
-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
3/6
pshJ/MAsb
pshlTMAsh
~ . b l / M A s b
N p t r N - a + )C tr N-n)C tr C tr
M,O)
M,n)
.
M,N)
Xtr nXtr a + 1)Xtr NXtr
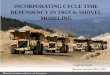
Fig. 1 tate transition and transition rates
of
the shovel-truck system.
to a different state follows an exponential distribution.
Thus,
M k h + (N-n)ktr - nb r ) P(o,n)
this stochastic process is a continuous-time M arkov chain .
Let
v(,,~)
be the rate at which the process makes a
N-n+l)ptrP o,
+
(n+l)htrP(o,+I)
transition w hen in state (m,n), an d let q(,,, ,
) m2,n2)
be the rate
(12)
at which the process m akes a transition into state (m2,n2)
+
hP(l,n)
for n = 1, ..., N-1
when in state (m l n 1). T he state transition and the
transition
rates are shown in Fig. 1.
In addition to the mem oryless property , this Markov
( M k h N b r ) P ( ~ , ~ )
ktr
P ( ~ ,-1) hshP( l ,~)
3,
chain ha s the folIowing properties:
All the states of the Markov chain comm unicate. There-
((M-m)kh mhsh N~tr)P(rn,O)
fore, this Markov chain is irreducible.
This is a finite-state Markov chain, and it is aperiodic.
=
( -m+l
)khP(m-l,
0)
(14)
An irreducible, finite-state Markov chain is positive re-
current in the sen se that, starting in any state , the mean
time
to return to that state is finite. Thus, this Markov chain
is
positive recurrent.
Since this M arkov chain is irreducible, positive recurrent
and aperiodic, the limiting probability that the Markov pro-
cess is in a particular state (m,n) exists. Furthermore,
this
limiting probability is independent of the initial state of
the
stochastic process. This limiting probability represents the
long-run portion of time that the process will be in state
(m,n).
Let
P(,,n)
be the limiting probab ility that the process w iIl be
in state (m,n). From Kolm ogorov's forw ard equation , the
following equation can be obtained:
for k,l) =
(OD),
...,
(M,N)
This gives the following set of equations:
(Mkh Nktr)
P(o,o) hshP(1,o)
+ htrP(0,l)
1 1)
(m+l)hshP(rn+~,) htrP(rn,~)
f o r m = 1, ...,
M-1
M-mIkh
m h h
(N-n)~tr+nhtr)P(rn,n)
= (M-m+l )khP(rn-1 ,n) (m+l)hhP(rn+ln)
+ (N-n+l )~trP(rn,n-l)
+
(n +l )brP(rn,n+~) 15
fo rm
= 1, ...,
M-1; n = 1, . . . , N-1
((M-m)kh
+
m h h Nhtr)P(rn,~)
(M-m+l )khP(rn-1 N)
+
( m + l hhP (rn+l,N ) ~ ~ t r ~ ( r n . ~ - l )
for m = 1, ..., M-1
TRANSACTIONS VOL.
296
1830
SOCIETY FOR MINING, METALLURGY, AND
EXPLORATION,
INC.
-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
4/6
low Erlang distributions,and they are identical for each
piece
of eaui~ment.
I
17)
The parameters describing the distributions do not
change in the simulation process, that is, the activity
times
are stable.
After dumping, a truck will go to a shovel with mini-
mum queueing length.
N-n+l )~trP M,n-1)
n+l
)htrP M,n+l)
l a )
These assumptions are just for this study. If a study is
conducted for a particular mine, the above assumptions are
for
n
=
1 ,
...,
N-1
not necessary and the simulation can be done in accordance
with the actual situations of that mine.
The simulation language SLAM
I
(Simulation Language
Mhsh Nhtr IP M,~)
for Alternative Modeling) (Pritsker, 1986) is used to model
the system. Depicted in Fig. is the SLAM
I
network model
khP M- 1 ,N) PtrP M,N-1)
I)
for routing then entities representing then trucks based on
the
assumptions given above. The n entities need to be inserted
The preceding set of equations, along with the following
into the network directly. These entities will continue to
equation:
cycle through the network until the simulation is
terminated.
When an entity arrives at the node SELQ, it will select the
MN)
shovel with minimum queueing length for loading. After
P rn.n)
=
20)
completing the loading operation, the entity then undertakes
rn,n)= O,o)
the activities representing hauling, dumping and traveling
can be used to solve for P(,,-,). back, and returns to node
SELQ. The global variable XX(1)
keeps the record of the production during the simulation
Unit time productivity
o
the system in specific state
process.
LOAD, HAUL, DUMP, and TRAVEL are at-
tributes of an entity used to specify the Erlang
distributions
To determine the unit-time productivity of the system in a
describing loading, hauling, dumping and traveling back
specific state (m,n), we can consider a shovel-truck system
activities. From the production and the simulation time, the
with m shovels and n trucks in the system without break-
unit-time productivity (U(m n)) can be determined.
downs of trucks and/or shovels. For such a system, the basic
activities include loading, hauling, dumping and traveling
Effectiveness
o
the shovel truck system
back. The times for performing these activities can be
described by distributions such as a triangle distribution,
a
System effectiveness is a measure of the ability of a
normal distribution, a lognormal distribution, an exponential
system to accomplish its objectives. In this paper, the
distribution, an Erlang distribution, or a Weibull distribution,
objective is to evaluate the system effectiveness in terms of
depending on the real world situations in the particular mine.
productivity, or more specifically, to study the relationship
Theoretically, the system can be described as a cyclic,
between the productivity and the reliability of the
equipment
closed queueing network. If the activity times are exponen-
(MTBFshand MTBF,,) and the maintainability of the equip-
tially distributed, the steady state probability can be
easily
ment (MTTRshand MTTR,,).
achieved by using the Markovian property. However, in the
For a shovel-truck system with M shovels and N trucks,
real world, the activity times are often not exponentially
the probability the system will be in state (m,n), or the
long-
distributed. An Erlang distribution can describe the actual
run portion of time the system will be in state (m,n), is
P(,,n).
activity times better than an exponential distribution. If
the
The unit-time productivity of the system in state (m,n) is
activity times follow Erlang distributions, the activities
can
U(,,.,,. Therefore, the unit-time productivity of the system
is:
be treated as if they are camed out in a number of phases
M.N
where the time interval for each phase is exponentially
distributed, and the Markovian property can still be used in
= P rn.n)U rn,n)
rn,n)= O,O)
21
the analysis.
Suppose there
are
no breakdowns of shovels and trucks (i.e.
However, queueing models with Erlang distributed activities
the system is always in state (M,N)), hen the effectivenessof
the
suffer from computational difficulties, since the number of
states
system is 1. The unit-time productivity of such a system is:
that
describe the system will be huge when the numbers of shovels
and trucks increase. Queueing networks with activity times
follow-
S M,N) = U M,N)
22)
ing other distributions are very difficult
to
solve mathematically.
Thus, in general,
the
effectiveness of a shovel-truck system is:
Therefore, a sirnulation technique is used
to study the unit-time productivity of the
system in a particular state (ma)
in
this
study.
The following assumptions are
made in the simulation:
There is enough space at the
dumping points so that there is no
waiting for dumping when a truck
arrives at a dumping point.
Activity times for loading, haul-
ing, dumping and traveling back fol-
Fig. - LAM II network for the system in a state m,n).
SOCIETY FOR MINING. METALLURGY. AND EXPLORATION, INC.
TRANSACTIONS VOL. 296
83
-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
5/6
LFT ,,
The relationship between the system effectiveness and
BBT
The relationship between the system effectiveness and
For a given shovel-truck system, if the activity times are
stable, the system effective ness is a function of the
reliability
of equipment (MTBFshand MTBF,,) and the maintain ability
of the equipment (M ITR sh and MTTR,,) .
A quantitative study o system effectiveness
A personal compute r program w as coded to solve the prob-
lem. The main tasks of the program include setting up the
coefficient ma mx and solving the linear system for P ,,n).
The
linear system was solved by the Gaussian-elimination method.
The outcom es of simulation (the unit-time productivity of
the
system in different states)
are
input to the program an d used to
determine the system effectiveness.
A shovel-truck system with four shov els and 20 trucks is
used for the quantitative example. Figures
3.
4. and 6
illustrate how M ITR sh, MlTR ,,, MTBF sh and MTBF,, will
affect the system effectiveness. These figures are based on
the following conditions:
Figure
3
-The values of MTBF sh, M lTR ,, and MTBF,,
Eb:
The relationship between the system effectiveness and
ZFB;
The relationship between the system effectiveness and
are fixed at 90, 5 and 45 hours, respectively.
Figure 4 -The values of MTTR sh, MTBF shand M TBF,,
are fixed at 8 , 9 0 and 45 hours, respectively.
Figure 5 he values of MT TRsh, MTTR,, and MTBF,,
are fixed at 8 , 5 and 45 ho urs, respectively.
Figure 6 -The values of M lT Rs h, MTBFshand MTTRtr
are fixed at 8 ,9 0 and 5 hours, respectively.
From Figs.
3
an d4 , i t can be seen that the system effective-
ness decreases when the mean time to repair the equipment
increases. Figures 5 and 6 indicate that the system
effective-
ness increases when the mean time between failures of the
equipment increases.
Figure 7 is based on the data in Table 1. From condition
1 to condition 2 1, MTBF sh and MTBF,, increase, MTTRsh
and MTTR,,decrease, and only one of the param eters changes
each time.
From Fig. 7 and Table
1
note that MlTR ,, and MTBF,,
have a grea ter effect on the system effectiveness thanMTT
Rsh
and MTBFsh , espectively. In other words, the reliability
and
maintainability of trucks hav e a greater effect on the
system
effectivene ss than those of shovels. For example, from
condition
1
to condition 5, M TTR sh, MTB Fsh, M'ITR,, and
MTBF,, increase or decrease by one hour, respective ly, and
the system effectiven ess increases by 0.0057,0.0006 ,0.0129
and 0.0024, respectively. This is partly because MT BFsh s
TRANSACTIONS VOL. 296 1832
SOCIETY
FOR MINING, METALLURGY. AND EXPLORATION. IN
-
8/10/2019 analysis of the effectiveness of shovel-truck mining
system.pdf
6/6
SOCIETY FOR MINING. METALLURGY, AND EXPLORATION, INC.
increase of the system effectiveness by 0.0217. Thus, it is
clear that the system effectiveness may not be improved
significantly by only improving the reliability or the main-
tainability of one type of equipment. If both the
reliability
and the maintainability of both types of equipment can be
improved simultaneously, the system effectiveness can be
improved significantly.
onclusions
This paper has presented a methodology for analyzing the
system effectiveness of shovel-truck mining systems. By
performing sensitivity analyses, the effect of the
reliability
and maintainability of each type of equipment on the system
effectiveness was assessed. The parameter that has the most
onditions
significant effect on the system effectiveness was
pinpointed.
The quantitative study suggested that in order to obtain
high
Fig 7 he system ef fect i veness under di f ferent
conditions.
system effectiveness, it is necessary to simultaneously im-
prove the reliability and maintainability of the equipment,
or
larger than MTBF, and the number of trucks is larger than
the
in other words, the quality and efficiency of the
maintenance
number of shovels in the system.
program must be improved.
It can also be noted that each time when M-decreases by
The quality and efficiency of the maintenance program
one hour, there is a jump of the system effectiveness. Thus,
the
can be enhanced by better planning of equipment mainte-
maintainability of trucks is the most sensitive parameter.
Mea-
nance (including better preventive or predictive maintenance
sures should
be
taken to reduce the repair time of trucks.
and better work procedures), by using better trained mechan-
From Fig. it seems that, except for MTTR,,, each of
ics, by better controlling parts inventory, and by utilizing
an
the other factors (MTTRsh, MTBFShand MTBF,,) alone
information system to achieve better response time. Basi-
does not have a significant effect on the system effective-
cally, better preventivelpredictive maintenance will
increase
ness.
For example, from condition-
5
to condition
9,
the reliability of equipment (MTBFsh and MTBF,,), while
MTTRsh,MTBFSh nd MTBF,, increase or decrease by one
better workforce capability (training level) and response
time
hour, and the systemeffectiveness only increases by 0.0061,
will improve the maintainability of equipment
(MTTRsh nd
0.0006 and 0.0020, respectively. However, the combined M ITR,,).
Even though some costs will be involved in such
effect of these three parameters (an increase of the system
activities, the increase of system effectiveness will
generally
effectiveness of 0.0087) will be non-negligible. Together
result in
a
significant increase of productivity.
with the effect of MTTR,,, the total effect will be an
TRANSACTIONS VOL. 296 1833
Table
he
system ef fect i veness under di f ferent conditions
System
Condition MlTR MTBF MlTR MTBF effectiveness
10
80 8 36 0 8093
2 9 80 8 36 0 81 50
3 9 81 8 36 0 8156
4 9 8 7
36 0 8285
5 9
81 7 37 0 8309
6 8
8 7 37 0 8370
7 8 82 7
37 0 8376
8 8 82 6
37 0 8506
9 8 82 6 38 0 8526
10 7
82 6 38 0 8591
7
83 6 38 0 8596
12 7 83 5
38 0 8726
13 7
83 5 39 0 8743
14 6
83 5 39 0 881
15 6
84 5 39 0 881
16 6
84 4 39 0 8947
17 6
84 4 40 0 8960
18 5
84 4 40 0 9032
19 5
85 4 40 0 9037
20 5
85 3 40 0 91 6
21 5
85 3 41 0 91 6
References
Heyman. D.P.. and Sobel. M.J.. 1982. Stochastic Models
in Operations Research. Volume I, Stochast icProcesses
and Operating Characteristics.
M C G ~ ~ W - H ~ I I
o o korn-
pany. New York. 548 pp.
Kim.
Y.C.
and Ibarra, M.A.. 1981, Truck d~spatching y
computer simulation. BulkSol ids Handling. Vol. 1, No. 1,
pp. 137.147.
Lizotle, Y., and Bonates, E.. 1987, Truck and shovel
dispatching ules assessment using simulation, Mining
Science and Technology, vol. 5, NO. 1, pp. 45-58.
Luo,
Z.
and Lin,
Q.
1988, Erlangian cyclic queueing
model for shovel-truckhaulage systems, Mine Planning
andEquipment Selection, R.K. Singhal,ed.. A.A. Balkema.
Ronerdam, Netherlands, pp. 423-427.
Martz, H.F., and Waller, R.A., 1982, BayesianReliability
Analysis, John Wiley &Sons, Inc.. New York, 745 pp.
Pritsker. A.A.B., 1986, introduction to Simulation and
SLAMII, Systems PublishingCorporation. West Laiayene.
Indiana, 839 pp.
Ramani. R.V.. Bhanacherjee. A,. and Pawlikowski, R.J..
1988. Reliability, maintainability, and availability analy-
sis of longwall mining systems. SME Preprint, No. 88-
181. 12 pp.
Ross. S.M.. 1989. Introduction to Probability Models.
Academic Press, Inc.. San Diego. CA 92101, 544 pp.
Topuz, E., andDuan, C., 1991, Ananalyticalapproach o
evaluationof the operational effectiveness of continuous
mining systems, Min~ng cience and Technology, Vol.
12, No. 2, pp. 145-155.
Tu, H.J., and Hucka, V.J.. 1985. Analysis of open-pit truck
haulage system by use of a
computer model, CIM Bulletin, Vol. 79, No. 879, pp. 53-59.
White. J.W., and Olson. J.P.. 1986, Computer-based dispatching n
mines with concurrent
operating objectives,' Mining Engineering, Vol. 38, No. 11,
pp.
1045-1054.