Embed Size (px)
Citation preview
SÉANCE 4 : INTRODUCTION À LA GÉOMÉTRIE DES NOMBRES :
LE THÉORÈME DE MINKOWSKI
31 mars 2017 1 / 32
Introduction
La géométrie des nombres est une branche de la théorie des nombres, quivoit son origine dans les travaux de Hermann Minkowski (1896)
Cette branche étudie des problèmes arithmétiques dans des contextesgéométriques.
Comment des problèmes arithmétiques peuvent-ils être reformulés entermes géométriques?
On a déjà vu, par exemple, la relation Suite de Farey, nombres premiersentre eux et triangles primitifs.
31 mars 2017 2 / 32
Introduction
Un autre exemple simple, est la question de déterminer quels sont les entiersqui peuvent êtres représentés en une somme de deux carrés, c’est-à-dire :
quel entier naturel n, a la propriété qu’il existe p et q dans Z tels que
n = p2 +q2
le versant géométrique de cette question est :
le cercle C(p
n)= {(x ,y) ∈R2 | x2 +y2 = n
}de centre (0,0) et de rayon
pn
a-t-il au moins un point du réseau?
31 mars 2017 3 / 32
LE NOMBRE D’ENTIERS SUR UN CERCLE
On va commencer par le problème suivant :Soit n un entier naturel non nul.
QUESTION
Quel est le nombre N(n) de points du réseau dans l’intérieur et au bord du cercleC(
pn) de rayon r =p
n et de centre (0,0)?
En 1837, C. F. Gauss avait publié le calcul pour 10≤ n ≤ 300
31 mars 2017 4 / 32
LE NOMBRE D’ENTIERS SUR UN CERCLE
Le tableau suggère le résultat suivant :plus n devient grand, plus le quotient de N(n) par n est proche de πFormellement :
limn→+∞
N(n)
n=π= 3,14159....
En, 1961, L. Michelle a publié des valeurs additionnelles de N(n) :de
pn = 1 à
pn = 200 000.
Quelques unes de ces valeurs sont représentées dans le tableau suivant :
31 mars 2017 5 / 32
LE NOMBRE D’ENTIERS SUR UN CERCLE
Comme pour les résultats de Gauss, ce tableau renforce l’idée que :∣∣∣∣N(n)
n−π
∣∣∣∣ (1)
tends vers 0 lorsque n tend vers l’infini.
La géométrie peut nous aider à comprendre le comportement de la suiteN(n)
n .
Si on multiplie (1) par n, on obtient∣∣N(n)−n.π∣∣ (2)
On reconnait n.π, qui n’est autre que l’aire du disque de centre (0,0) et derayon
pn.
31 mars 2017 6 / 32
LE NOMBRE D’ENTIERS SUR UN CERCLE
On propose l’approche géométrique suivante à la question de Gauss :
Pour chaque point du réseau intérieur ou sur le cercle, on déssine un carrécentré en ce point et de côtés parallèles aux axes et de longueur 1.
On note par Un l’union de ces carrés.Alors l’aire Un est égale à N(n).
31 mars 2017 7 / 32
THÉORÈME DE MINKOWSKI
La géométrie des nombres est liée aussi à ce qu’on appelle des inégalitésDiophantiennes
EXEMPLE
Décider si l’inéquation
25x2 +126xy +162y2 ≤ 36
π
a des solutions (x ,y) dans le réseau différentes de (0,0).
Le problème des 4 carrés : la possibilité d’écrire tout entier comme sommede 4 carrés.
H. Minkowski s’est intéressé à ces problèmes, mais son approche étaitdifférente de celles de ses prédécesseurs :
son point de vue est géométrique.
31 mars 2017 8 / 32
ENSEMBLES CONVEXES
DÉFINITION
Un sous-ensemble C de R2 est dit convexe si pour tout couple de points A et B deC, le segment [AB] est inclus dans C.Formellement on a : C est convexe si
∀A,B ∈C,∀t ∈ [0,1], tA+ (1− t)B ∈C.
EXEMPLES
tout polygone régulier, un disque ...
31 mars 2017 9 / 32
EXEMPLES
Introduction to Convex Sets
with Applications to Economics
Debasis Mishra∗
March 21, 2011
1 Convex Sets
A set C ⊆ Rn is called convex if for all x, y ∈ C, we have λx+(1−λ)y ∈ C for all λ ∈ [0, 1].
The definition says that for any two points in set C, all points on the segment joining these
two points must lie in C for C to be convex. Figure 1 shows two sets which are convex and
two sets which are not convex.
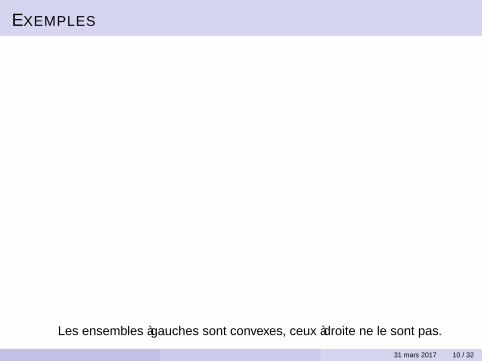
Figure 1: Sets on left are convex, but sets on right are not
Examples of convex sets:
• C = {(x1, x2, x3) ∈ R3 : x1 + 2x2 − x3 = 4}. This is the equation of a plane in R3.
In general, a hyperplane is defined as C = {x ∈ Rn : p · x = α}, where α ∈ R and
∗Planning Unit, Indian Statistical Institute, 7 Shahid Jit Singh Marg, New Delhi 110016, India, E-mail:
1
Les ensembles à gauches sont convexes, ceux à droite ne le sont pas.
31 mars 2017 10 / 32
PROPRIÉTÉS DES ENSEMBLES CONVEXES
L’intersection d’ensembles convexes est un ensemble convexe
Si C1 et C2 sont deux ensembles convexes, a et b deux nombres réelsalors :aC1 +bC2 := {ax +by |x ∈C1 et y ∈C2} est un convexe
l’image d’un convexe par une isométrie ( plus généralement une applicationaffine) est encore un convexe.
31 mars 2017 11 / 32
PROPRIÉTÉS DES ENSEMBLES CONVEXES
DÉFINITION
Soit S sous-ensemble quelconque de R2.Le plus petit convexe contenant S est appelé l’enveloppe convexe de S.
L’enveloppe convexe de S est par conséquent l’intersection de tous lesconvexes contenant S.
p ∈ Rn, called the normal to the hyperplane. Notation: As before p · x means dot
product of p and x, i.e.,∑n
i=1 pixi. For simplicity, we will sometimes write this as px.
We will often denote a hyperplane as (p, α).
A hyperplane is a convex set. Take any x, y ∈ C. Then for any λ ∈ [0, 1] define
z = λx + (1 − λ)y. Now, pz = λpx + (1 − λ)py = λα + (1 − λ)α = α. Hence z ∈ C.
• C = {(x1, x2, x3) ∈ R3 : x1 + 2x2 − x3 ≤ 4}. These are points on one side of the
hyperplane. In general, a half-space is defined as C = {x ∈ Rn : p · x ≤ α}, where
α ∈ R and p ∈ Rn. As in the case of a hyperplane, every half-space is a convex set.
• C = {(x1, x2) ∈ R2 : x21 +x2
2 ≤ 4}. The set C is a circle of radius two with center (0, 0).
• C = {(x1, x2, x3) ∈ R3 : x1 + x2 − x3 ≤ 2, x1 + 2x2 − x3 ≤ 4}. Set C is the intersection
of two half-spaces. In general, intersection of a finite number of half-spaces is called a
polyhedral set, and is written as C = {x : Ax ≤ b}, where A ∈ Rm×n and b ∈ Rm.
Here, C is the intersection of m half-spaces. A polyhedral set is convex, because
intersection of convex sets is a convex set, which we prove next.
Lemma 1 If C1 and C2 are two convex sets, then so is C1 ∩ C2.
Proof : Suppose x, y ∈ C1 ∩C2. Define z = λx+(1−λ)y for some λ ∈ [0, 1]. Since x, y ∈ C1
and C1 is convex, z ∈ C1. Similarly, z ∈ C2. Hence, z ∈ C1 ∩ C2. !
Weighted averages of the form∑k
i=1 λixi with
∑ki=1 λi = 1 and λi ≥ 0 for all i is called
convex combination of points (x1, . . . , xk).
Definition 1 The convex hull of a set C ⊆ Rn, denoted as H(C), is collection of all
convex combinations of C, i.e., x ∈ H(C) if and only if x can be represented as x =∑k
i=1 λixi
with∑k
i=1 λi = 1 and λi ≥ 0 for all i and x1, . . . , xk ∈ C for some integer k.
Figure 2 shows some sets and their convex hulls.
Figure 2: Convex Hulls
2
En bas les enveloppes convexes correspondantes.31 mars 2017 12 / 32
ENSEMBLES CONVEXES ET RÉSEAUX
DÉFINITION
Soit C un sous-ensemble convexe quelconque de R2.Soit P l’enveloppe convexe des points entiers à l’intérieur et sur le bord de C
P est un sous-ensemble convexe contenu dans C
31 mars 2017 13 / 32
ENSEMBLES CONVEXES ET RÉSEAUX
DÉFINITION
On note par P (C) et P (P) respectivement les périmètres de C et de P.
AlorsA (P)≤A (C) et P (P)≤P (C)
31 mars 2017 14 / 32
ENSEMBLES CONVEXES ET RÉSEAUX
Le théorème de Pick appliqué à P donne :
A (P)= IP + BP
2−1
où IP et BP sont respectivement les nombres des noeuds du réseauintérieurs et sur le bord de P.
Le nombre total L(P) de points entiers de P est égal à IP +BP , alors
L(P)= IP +BP =A (P)+ BP
2+1
Comme chaque segment du perimètre de P est de longueur au moins uneunité on a
BP ≤P (P)
31 mars 2017 15 / 32
ENSEMBLES CONVEXES ET RÉSEAUX
Donc le nombre L(C) de points entiers de P est majoré par :
L(C)= L(P)≤A (C)+ P (C)
2+1
On obtient ainsi une borne supérieure du nombre de points entiers dans unconvexe
31 mars 2017 16 / 32
ENSEMBLES CONVEXES ET RÉSEAUX
On vérifie cet inégalité pour le carré C1 de côté de longueur 5 on aA (C1)= 32 = 9, P (C1)= 4×3= 12 d’où
9= L(C1)= L(P1)≤A (C1)+P (C1)
2+1= 16.
31 mars 2017 17 / 32
THÉORÈME DE MINKOWSKI
Le théorème de Minkowski donne une condition suffisante pour s’assurer del’existence d’au moins un point du réseau différent de l’origine, dans unconvexe.
Ce théorème s’applique à des convexes symétriques par rapport à un point.
31 mars 2017 18 / 32
SOUS-ENSEMBLES DE MINKOWSKI OU M-ENSEMBLES
DÉFINITION
Un sous-ensemble C de R2 est appelé ensemble de Minkowski (ou M-ensemble)s’il est convexe et symétrique par rapport à un point O dans C c-à-d :pour tout point A de C, le point A′ qui se trouve dans la droite passant par A et Oet vérifiant A′O =OA est dans C.On dit que O est centre de symétrie de C.
EXEMPLES
Le centre de symétrie d’un disque est son centre.Tout polygone régulier est un M-ensemble.
31 mars 2017 19 / 32
M-ENSEMBLES
M-ensembles centrés en (0,0).
31 mars 2017 20 / 32
LE THÉORÈME FONDAMENTAL DE MINKOWSKI
THÉORÈME DE MINKOWSKI
On munit le plan réel R2 du réseau carré habituel.Soit C un M-ensemble de R2 de centre de symétrie l’origine (0,0).Si l’aire de C, vérifie
A (C)> 4
alors C contient au moins un noeud du réseau différent de l’origine (0,0).
OBSERVATION
Observons qu’un carré centré à l’origine et d’aire plus grande ou égale à 4 contientau moins 9 points du réseau, tous les points voisins de l’origine.
Ï Cependant, si on considère un tel carré symétrique d’aire légèrement plus petiteque 4, alors il ne contiendra aucun point du réseau, autre que l’origine.
31 mars 2017 21 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
Soit C un M-ensemble telle que A (C)> 4.
On contracte C d’un rapport de 12 , le M-ensemble résulant C′ a une aire
égale à(1
2
)2A (C)= 1
4 A (C), d’où
A (C′)> 1.
M-ensemble C contracté en C′.
31 mars 2017 22 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
Soit n un entier naturel n ≥ 1. On considère le carré de sommets (0,0),(n,0), (n,n) et (0,n).
Ce carré à (n+1)2 points du réseau ( dans son intérieur et sur son bord) àsavoir les points dont les deux coordonnées sont :
(0,0),(0,1),(0,2), . . . , (0,n),(1,0),(1,1),(1,2), . . . , (1, n),...(n, 0),(n,1),(n,2), . . .(n, n).
On translate notre ensemble C′ pour que son centre de symétrie soit placéen tous ces points.
On a (n+1)2 noeuds avec chacun des M-ensembles centrés, donc lasomme des aires des M-ensembles est égale à
(n+1)2 A (C′).
31 mars 2017 23 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
Les translatés du M-ensemble C′.
. 31 mars 2017 24 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
Soit s la plus grande distance entre un point de C′ et le centre (0,0).
La réunion (notée par U) des M-ensembles translatés sera incluse dans ungrand carré de coté n+2s
ce qui implique l’inégalité
(n+2s)2 ≥A (U)
31 mars 2017 25 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
Si on peut prouver que :
(n+1)2 A (C′)> (n+2s)2
alors on aurait montré qu’il y a véritablement des chevauchements entre lescopies de C′.Comme A (C′)> 1, alors cette inégalité est vraie pour un n assez grand.
car :
limn→+∞
(n+s)2
(n+1)2 = 1
31 mars 2017 26 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
On vient de prouver que, quitte à supposer n assez grand, qu’il existe deuxcopies de C′, centrées en des noeuds différents, dont l’intersection contientun noeud.
On translate d’abord cette paire d’ensembles tel que l’une d’entre elles soitcentrée à l’origine, c’est à dire elle sera notre ensemble C′ (original).
L’autre ensemble, notée C′′, sera alors centrée en un autre point (p, q),avec p et q entiers.
Soit (a′′, b′′) un point de leur intersection C′∩C′′,il existe, puisqu’on on avait montré que l’intersection est non-vide.
Comme C′′ est une copie de l’ensemble C′, translatée de l’origine à (p, q),
il en est de même pour le point (a′′, b′′) ∈C′′ qui est alors le translaté (par lamême translation) d’un certain point (a′, b′) de C′, ce qui veut dire :
(a′′, b′′)= (a′, b′)+ (p, q).
31 mars 2017 27 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
31 mars 2017 28 / 32
LA PREUVE DU THÉORÈME DE MINKOWSKI
D’autre part, comme C′ est symétrique et (a′, b′) ∈C′,(−a′, −b′) ∈C′.Soit alors le centre de gravité des points (a′′, b′′) et (−a′, −b′).
Les deux étant dans C′, leur centre de gravité se trouve aussi dans C′ aussi,(puisque C′ est convexe par hypothèse).Les coordonnées de ce centre de gravité sont :
(a′′,b′′)+ (−a′,−b′)2
= (a′′,b′′)− (a′,b′)2
ce qui, d’après l’égalité précédente, est égale à (p
2,
q
2).
Ceci prouve que le point (p
2,
q
2) ∈C′.
Comme le M-ensemble de départ C est l’image de C′ par une dilatation derapport 2, le point (p,q) est alors un noeud du réseau contenu dans C.
La démonstration est terminée, car on vient de voir que C contient un noeuddifférent de l’origine.
31 mars 2017 29 / 32
Le théorème fondamental de Minkowski dans un réseauquelconque
Un réseau de R2 est un sous-ensemble Γ de R2 de la forme
{mv1 +nv2 |m,n ∈Z}
où {v1,v2} est une base de R2.
Un point du réseau est appelé un noeud.
EXEMPLE
Ï Si v1 = (1,0) et v2 = (0,1), alors le réseau obtenu n’est autre que le réseau "carré"Z2.
Ï On obtient pour v1 = (1,1) et v2 = (2,1)
Γ= {(m+2n,m+n) |m,n ∈Z}
31 mars 2017 30 / 32
Réseau
(0, 0) (1, 0)
(0, 1)
(a) A basis of Z2
(0, 0)
(1, 1) (2, 1)
(b) Another basis of Z2
(0, 0)
(1, 1)
(2, 0)
(c) Not a basis of Z2
(0, 0)
(2, 1)
(d) Not a full-rank lattice
Figure 2: Some lattice bases
DEFINITION 3 (FUNDAMENTAL PARALLELEPIPED) For any lattice basis B we define
P(B) = {Bx | x 2 Rn,8i : 0 ∑ xi < 1} .
Examples of fundamental parallelepipeds are shown by the gray areas in Figure 2. Notice that P(B)depends on the basis B. It follows easily from the definitions above, that if we place one copy of P(B) ateach lattice point in L(B) we obtain a tiling of the entire span(L(B)). See Figure 3.
(0, 0)
(1, 1) (2, 1)
Figure 3: Tiling span(L(B)) with P(B)
The first question we will try to answer is: how can we tell if a given set of vectors forms a basis ofa lattice? As we have seen above, not every set of n linearly vectors in Zn is a basis of Zn. One possibleanswer is given in the following lemma. It says that the basic parallelepiped generated by the vectors shouldnot contain any lattice points, except the origin. As an example, notice that the basic parallelepiped shownin Figure 2(c) contains the lattice point (1, 0) whereas those in Figures 2(a) and 2(b) do not contain anynonzero lattice points.
2
Si v1 = (a,b) et v2 = (c,d) on note par
M =(a bc d
)
alors Γ est égal à{
M(mn
)| m,n ∈Z
}=MZ2
Le déterminant de la matrice M =(a bc d
)est le nombre réel
det(M)= ad −bc.
31 mars 2017 31 / 32
Réseau
DÉFINITION
Ï On appelle parallélogramme fondamental l’ensemble
P = {(ax +cy ,bx +dy) |0≤ x ≤ 1, 0≤ y ≤ 1
}Ï Le volume du parallélogramme fondamental sera noté V .
Ï Le volume du parallélogramme fondamental P est égal à
|det(M)| = |ad −bc|.
31 mars 2017 32 / 32





























