Embed Size (px)
Citation preview
Animating Human Locomotion
Shang-Lin Chen
Introduction
Animate human figure on flat solid surface. Has legs, knees, torso, arms, head, hips. Mainly use inverse kinematics with some
forward dynamics. Essential element of walking: leg motion
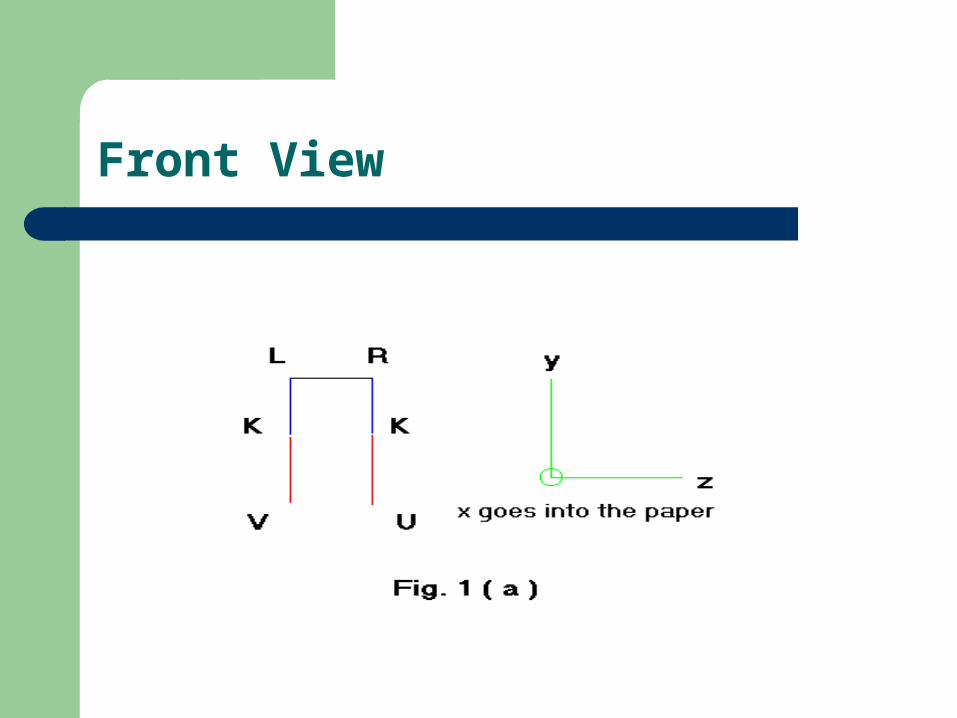
Front View

Side View
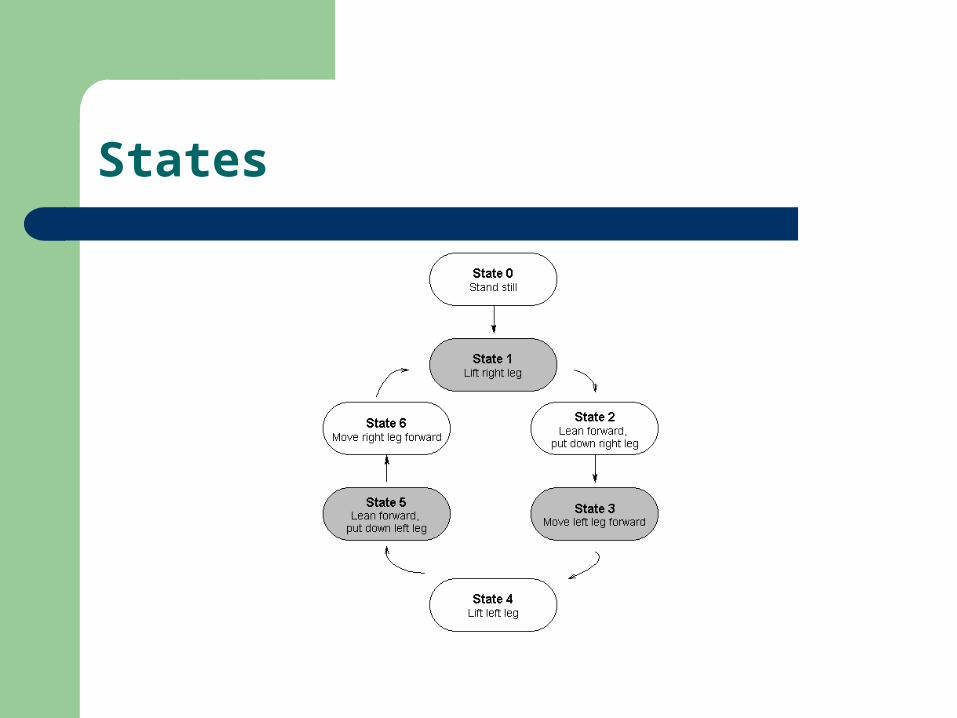
States

State 1 – Lift Right Leg
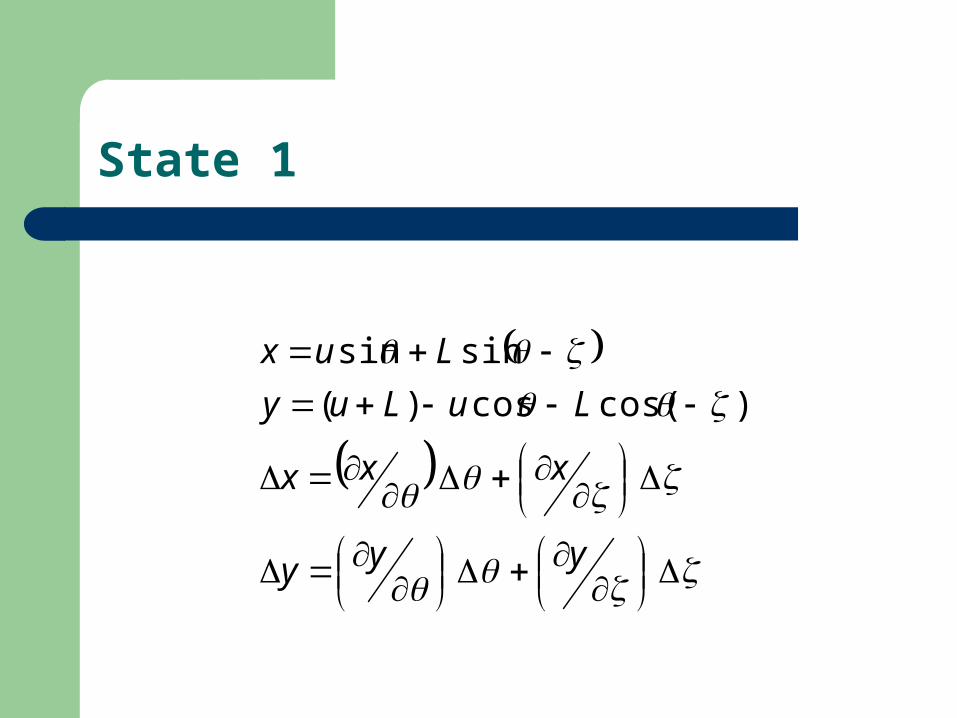
State 1
yyy
xxx
LuLuy
Lux
)cos(cos)(
sinsin

State 1
sindet
det
11
1
uLJ
xy
xy
JJ
y
xJ
yy
xx
JJy
x
State 1
When sin ζ = 0, J-1 becomes singular. Avoid singularity by assigning predetermined
values to Δθ and Δζ. No singularity – Use regular inverse
kinematics. Get frame-by-frame angle increments.

State 2
Left leg leans forward, right leg steps forward.
Initial position same as final position of State 1.

State 2 – Intermediate Position

State 2 – Final Position
State 2 - Math
Tip of left leg serves as pivot. Coefficients determined from forward dynamics
– moment of inertia.
012
2 AtAtA

State 2 - Math
)sin(cossin
)cossin(
1)(cos
0.sinwhenSingular
)sin(det
)cos(cossin)(
)sin(sincos)(
yxLyxL
uLJ
LLuy
xLuLux tipleft
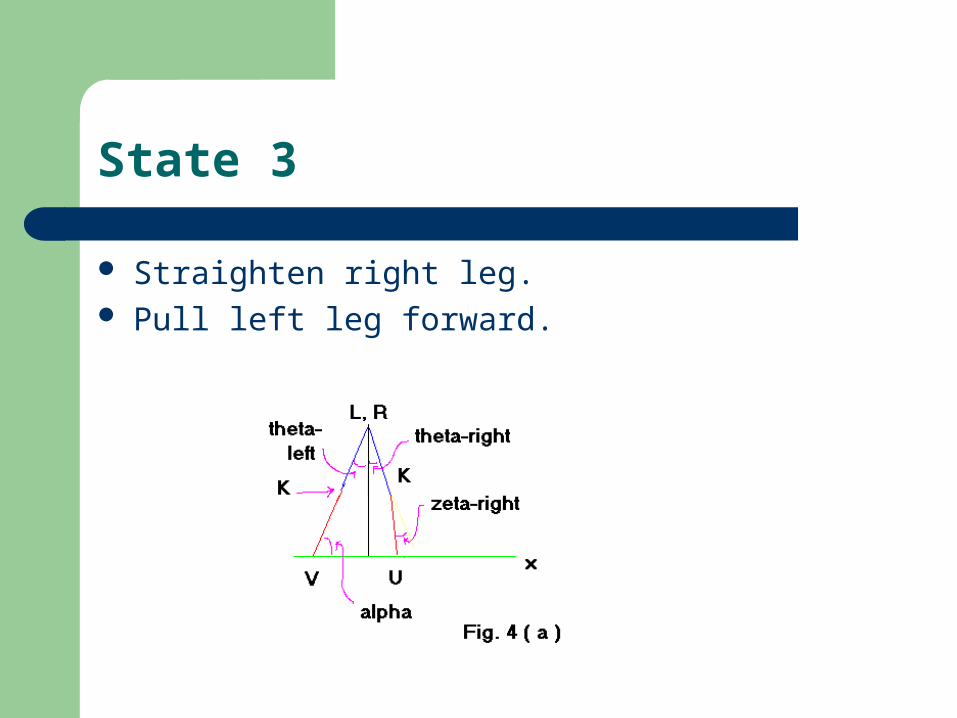
State 3
Straighten right leg. Pull left leg forward.

State 3

State 3 - Math
Inverse kinematics similar to State 2. Method of avoiding singularities also similar
to State 2.
States 4-6 are mirror images of States 1-3. Once leg motion done, add on torso, head,
and arms. Change posture for aesthetics.

Implementation
C++, OpenGL, GLUT Start in State 0, loop continuously through
other states. Code math equations for each state. Inputs: θmax, step size, leg length.
Other Methods
Forward and inverse dynamics– Needs physics and biomechanics.– More realistic but much more complex.
Motion capture– Subject wears sensors to capture motion data.– Or build physical model.

AVI movie
AVI movie (backup)