Embed Size (px)
Citation preview

Ant Simulated RobotAnt Simulated Robot
Mechatronics Final Project DesignMechatronics Final Project Design
Group 7Chan, EdwardKeng, Ta KangParada, Adrian
Goals & Other DesignsGoals & Other Designs
�� To build a mobile robot that is able to To build a mobile robot that is able to mimic an ant (searching for food and mimic an ant (searching for food and following a trail) following a trail)
�� Attempted DesignsAttempted Designs�� Dancing robotDancing robot�� Automated BartenderAutomated Bartender�� Fire FighterFire Fighter
Real Ant BehaviorReal Ant Behavior
�� Ants find shortest route from their Ants find shortest route from their nest to the source of foodnest to the source of food
�� As ants travel to and from the food As ants travel to and from the food source pheromones are released to source pheromones are released to guide other antsguide other ants
�� As more ants follow the trail the As more ants follow the trail the pheromone trail gets strongerpheromone trail gets stronger
Simulated Ant BehaviorSimulated Ant Behavior
�� Start from an initial position (nest)Start from an initial position (nest)�� Robot will search for Robot will search for ““foodfood”” which will be an which will be an
electronic cake (hot and bright)electronic cake (hot and bright)�� After detecting the cake thermally, the robot After detecting the cake thermally, the robot
will simulate a pheromone trail by a marker will simulate a pheromone trail by a marker being dropped onto the surfacebeing dropped onto the surface
�� It will then travel back to itIt will then travel back to it’’s initial position s initial position following a black (fluorescent dye) linefollowing a black (fluorescent dye) line

Floor SettingFloor Setting
�� A singleA single--level floor with an black level floor with an black (fluorescent dye) line path drawn(fluorescent dye) line path drawn
�� The robot will follow the The robot will follow the ““pheromone pheromone trail,trail,”” the line drawn on the surfacethe line drawn on the surface
�� It will simulate pheromone being It will simulate pheromone being released by dropping a (fluorescent released by dropping a (fluorescent dye) pen to strengthen the traildye) pen to strengthen the trail
Basic Robot ConstructionBasic Robot Construction
�� The robot will run on two modified continuous The robot will run on two modified continuous servo motors for mobilizationservo motors for mobilization
�� A front servo motor will rotate and scan for cake f A front servo motor will rotate and scan for cake f (light intensity)(light intensity)
�� Another servo motor will simulate the pen dropAnother servo motor will simulate the pen drop�� A front bumper will detect obstacles (walls, etc)A front bumper will detect obstacles (walls, etc)�� Power source will be supplied by 4 AA batteries Power source will be supplied by 4 AA batteries
which is backed up by a 3300uF x 4 capacitor bank which is backed up by a 3300uF x 4 capacitor bank for surge current stabilityfor surge current stability
�� Basic Stamp 2 consists of the main circuitry and PBasic Stamp 2 consists of the main circuitry and P--Basic programBasic program
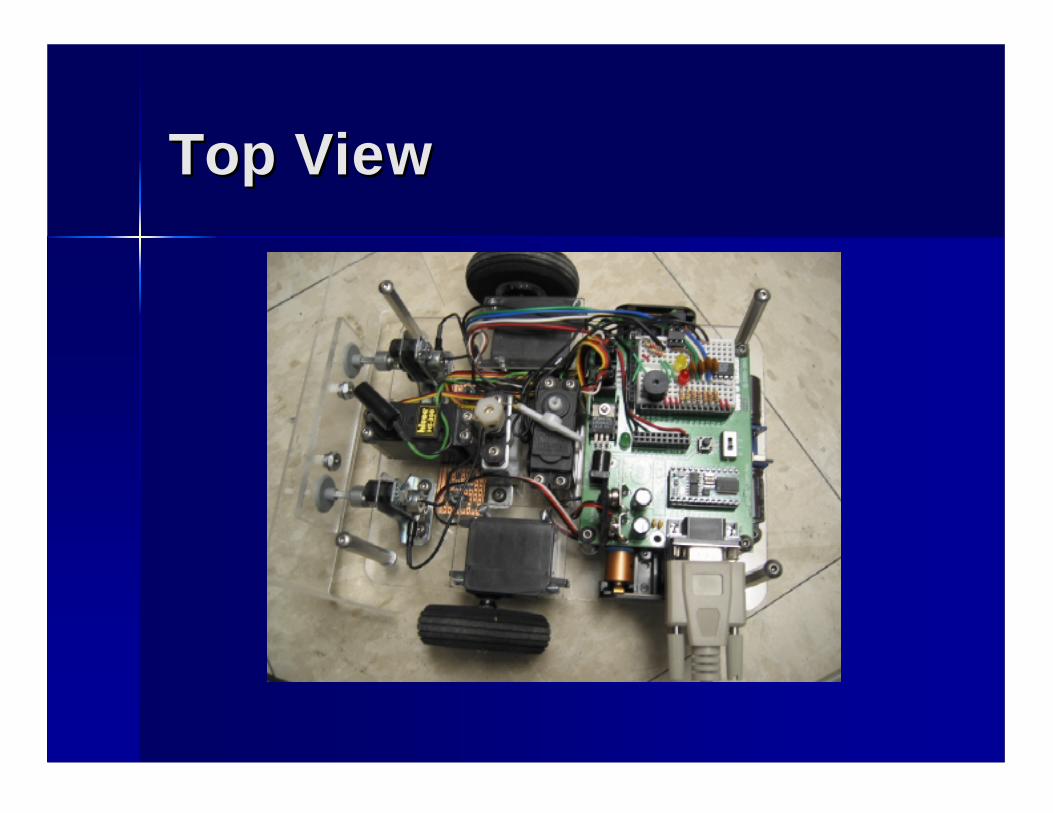
Top ViewTop View

Pen Drop SimulatorPen Drop Simulator
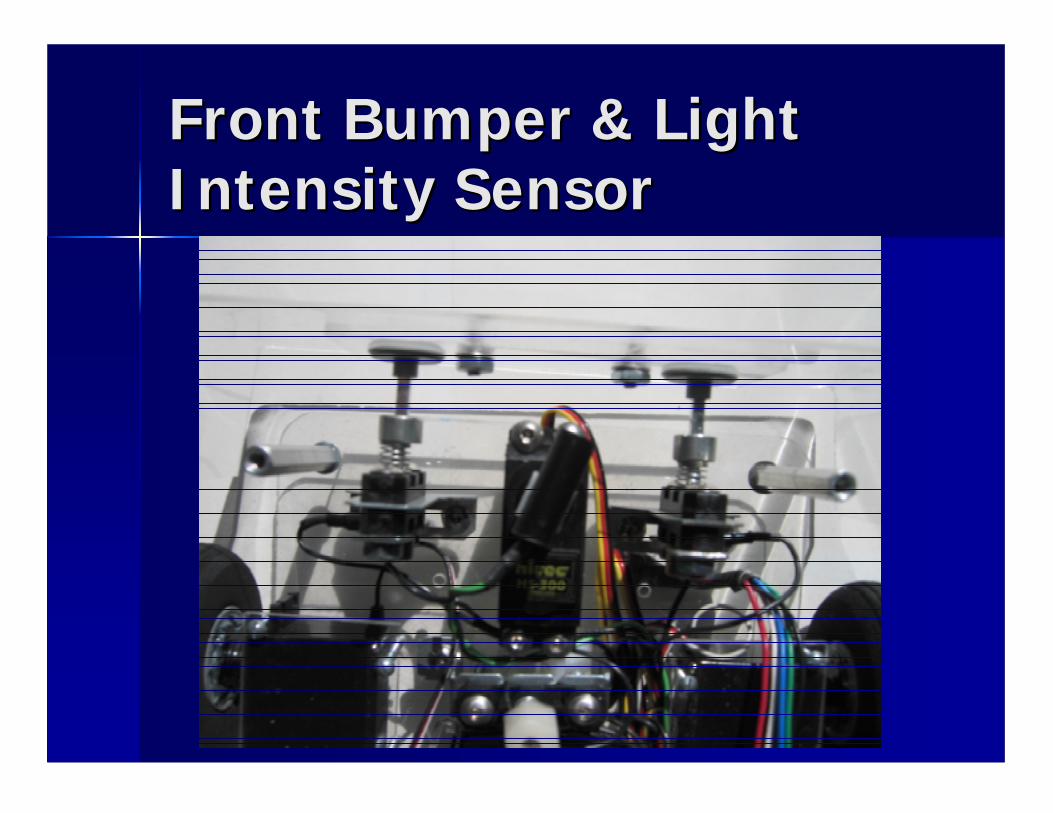
Front Bumper & Light Front Bumper & Light Intensity SensorIntensity Sensor
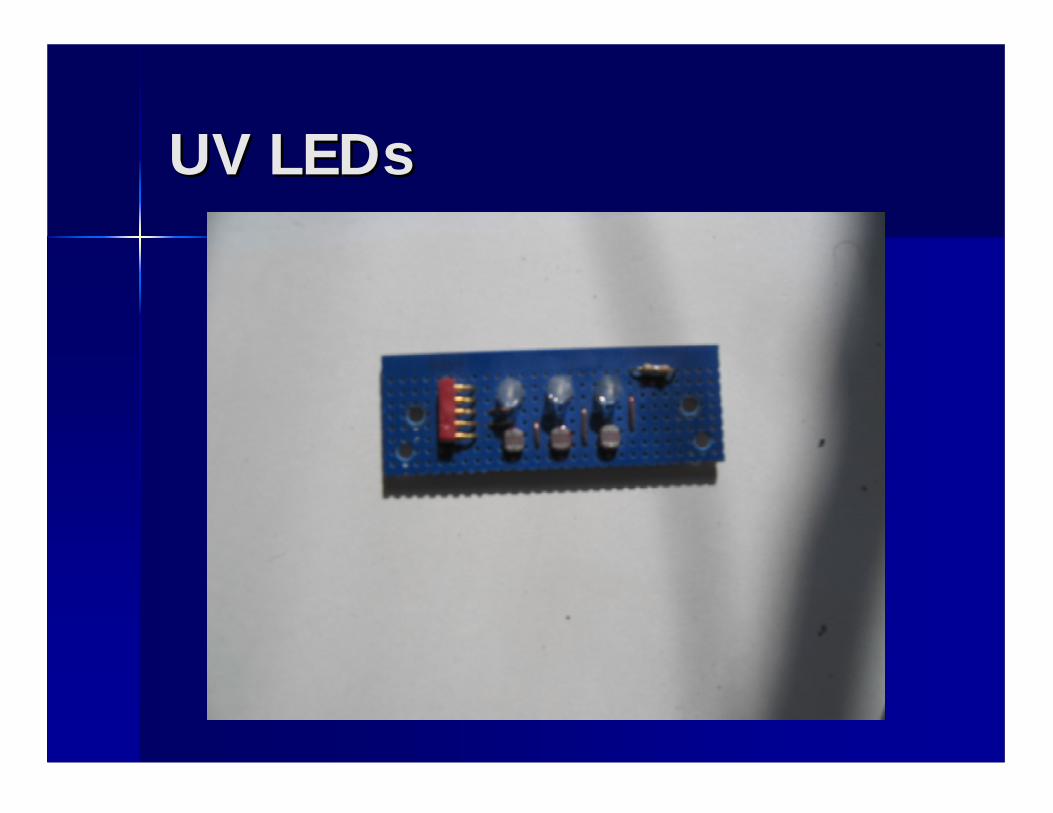
UV UV LEDsLEDs

Bottom ViewBottom View

Temperature Sensor Temperature Sensor CircuitryCircuitry
1k
Vss
0.1uF
+5VDC
P2P1P0
VDDDQ
T loCLKRSTGND
T hi
Tcom
DS 1620
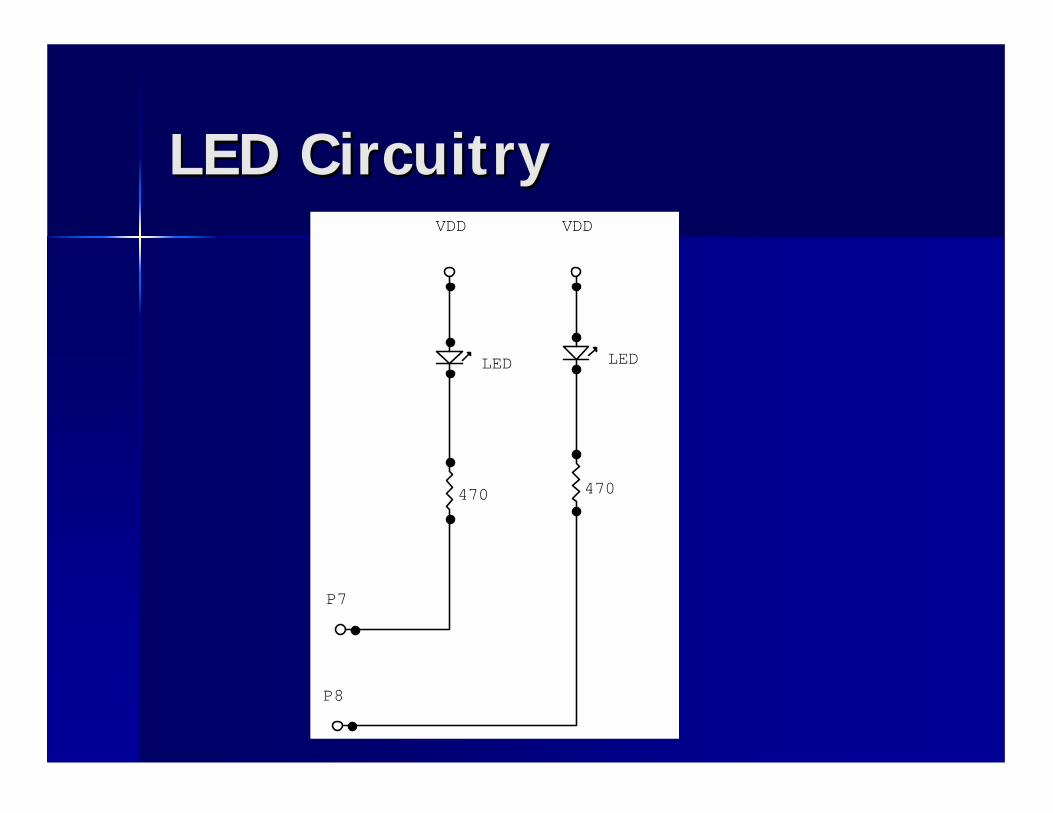
LED CircuitryLED Circuitry
P8
P7
LEDLED
VDDVDD
470470

Switches CircuitrySwitches Circuitry
2.2k
Vss
Right Bumper SwitchP10
VDD Vss
Left Bumper SwitchP9
VDD
2.2k
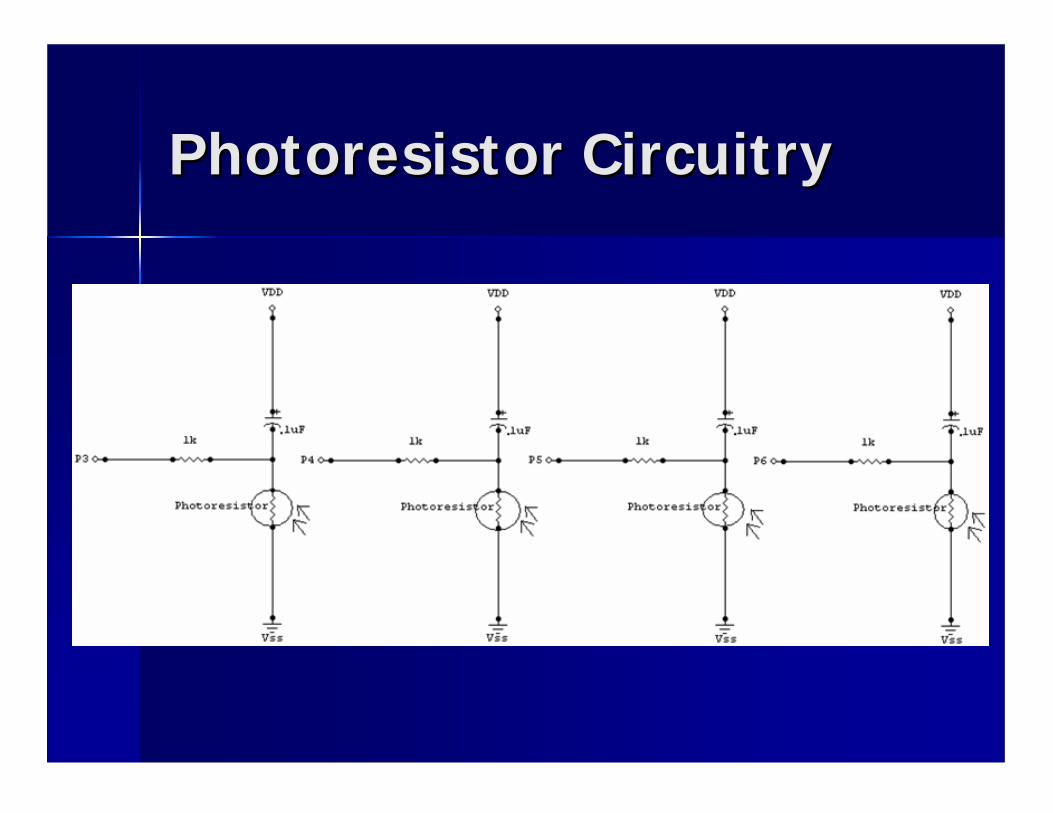
PhotoresistorPhotoresistor CircuitryCircuitry
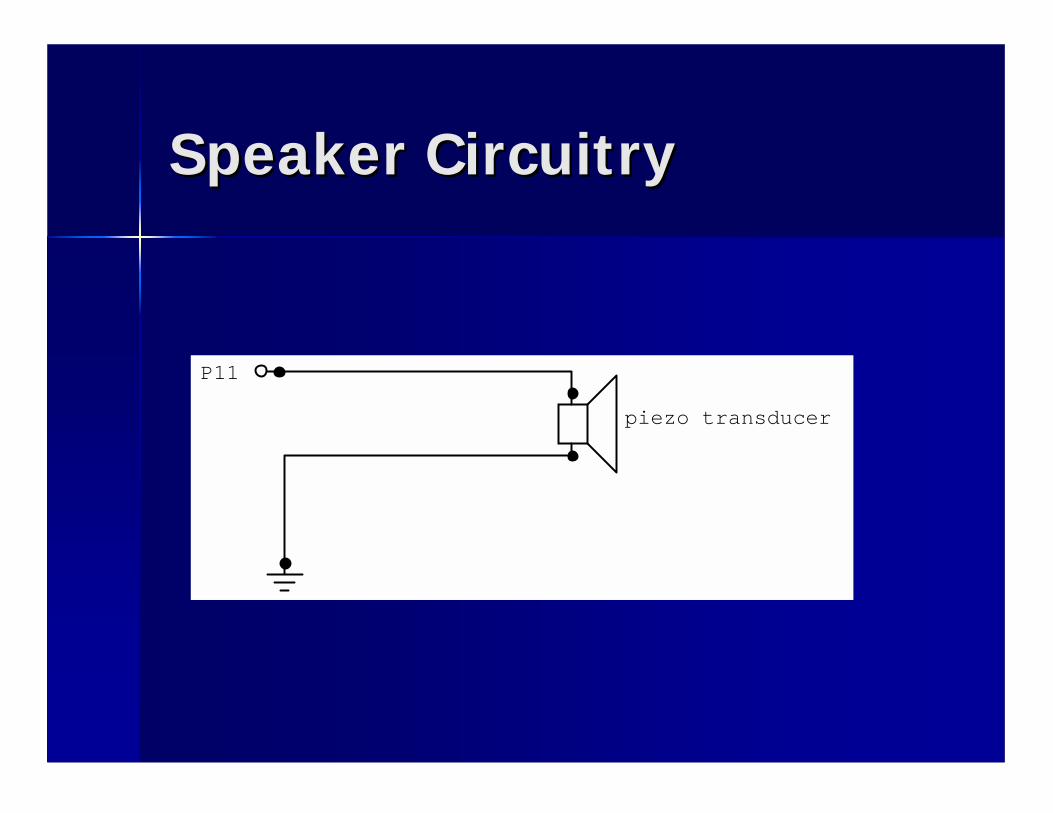
Speaker Circuitry Speaker Circuitry
P11
piezo transducer

UV LED CircuitryUV LED Circuitry
UV LEDUV LEDUV LED+6V
100
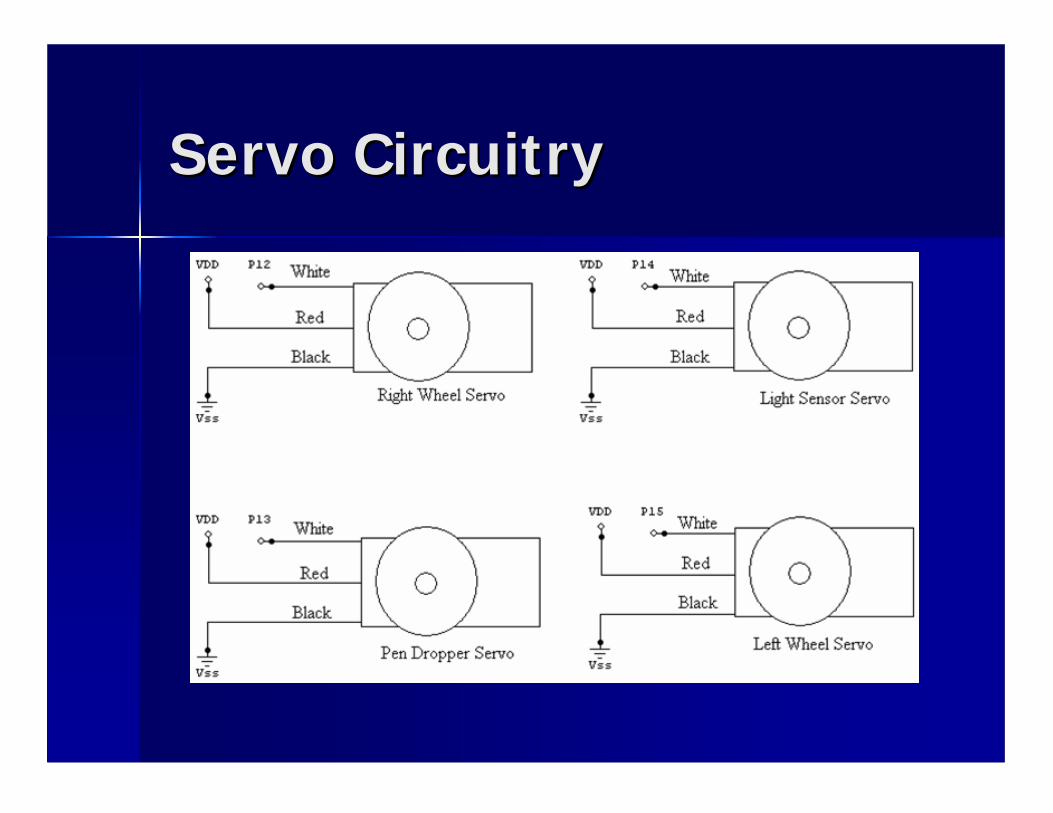
Servo CircuitryServo Circuitry
Software and Program Software and Program StructureStructure�� Food and Pheromone ReleasingFood and Pheromone Releasing�� Line TracingLine Tracing
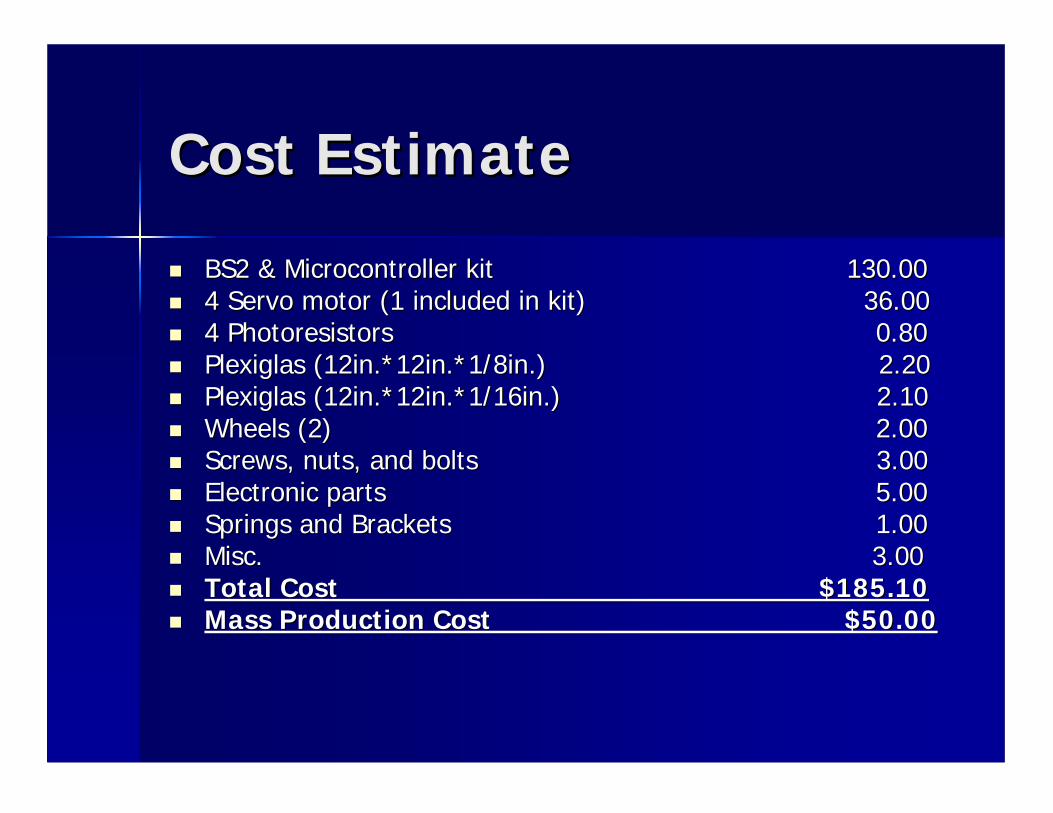
Cost EstimateCost Estimate
�� BS2 & Microcontroller kitBS2 & Microcontroller kit 130.00130.00�� 4 Servo motor (1 included in kit)4 Servo motor (1 included in kit) 36.0036.00�� 4 4 PhotoresistorsPhotoresistors 0.800.80�� Plexiglas (12in.*12in.*1/8in.) Plexiglas (12in.*12in.*1/8in.) 2.202.20�� Plexiglas (12in.*12in.*1/16in.) Plexiglas (12in.*12in.*1/16in.) 2.102.10�� Wheels (2)Wheels (2) 2.002.00�� Screws, nuts, and bolts Screws, nuts, and bolts 3.003.00�� Electronic partsElectronic parts 5.005.00�� Springs and Brackets Springs and Brackets 1.001.00�� Misc.Misc. 3.003.00�� Total Cost Total Cost $185.10$185.10�� Mass Production CostMass Production Cost $50.00$50.00
ResultsResults
�� Percentage of Goals completed: 70%Percentage of Goals completed: 70%�� Success rate: Success rate: 90%90%
Problems & Possible Problems & Possible ImprovementsImprovements
�� Hardware:Hardware:–– More precise fluorescent light detecting More precise fluorescent light detecting
mechanismmechanism
�� Software:Software:–– Using the two remaining Using the two remaining photoresistorphotoresistor for for
more precise line trackingmore precise line tracking–– More development is required to perfect More development is required to perfect
softwaresoftware

Applications Applications
�� Espionage/MilitaryEspionage/Military�� Ant SimulationAnt Simulation�� Colonized Ant SimulationColonized Ant Simulation
ConclusionConclusion
�� Construction of the robot was a Construction of the robot was a successsuccess
�� More time is required to fully utilize More time is required to fully utilize hardware of robothardware of robot
Acknowledgements Acknowledgements
�� MicroParticleMicroParticle Photo Physics Lab(MP3L)Photo Physics Lab(MP3L)�� MishahMishah SalmanSalman�� Wilmer Wilmer RengifoRengifo


![An Improved Ant Colony Algorithm of Robot Path Planning ...downloads.hindawi.com/journals/jr/2019/6097591.pdf · speed of ant colony algorithm and the problem of easy to fallintolocaloptimum,[]proposestoaddarticial](https://img.pdfslide.net/doc/110x75/5f6e7f1b0f8e243d573a925b/an-improved-ant-colony-algorithm-of-robot-path-planning-speed-of-ant-colony.jpg)
![Artificial neural networks used in optimization problems · genetic algorithms [8], particle swarm optimization [9], Simulated annealing [10], ant colony optimization [11] etc. This](https://img.pdfslide.net/doc/110x75/5e986466315cdd228f286757/artificial-neural-networks-used-in-optimization-problems-genetic-algorithms-8.jpg)


















![Elmer-Rico E. Mojicaelmericomojica.weebly.com/.../kimika_2003_19_77-82.pdf · [7], simulated annealing [8], simulated jumping [9], neural networks [101, and ant colonies [11—131](https://img.pdfslide.net/doc/110x75/5fd1302dd04c375c812a5d2e/elmer-rico-e-7-simulated-annealing-8-simulated-jumping-9-neural-networks.jpg)






