Embed Size (px)
Citation preview
محيط های چندرسانه ای۰۱ -۰۸۰ -۱۱ -۱۳
)بخش سوم(
دانشگاه شهيد بهشتی
۱۳۹۳زمستان
احمد محمودی ازناوه
http://faculties.sbu.ac.ir/~a_mahmoudi/
فهرست مطالب
الگوريتم هاي تشخيص لبه•مشتق اول•مشتق دوم•تاثير نويز••Roberts ،Prewitt وSobel•Cannyفيلتر الپالسين•
1محيط های چندرسانه ای

تشخيص لبه
ها مجموعه پيکسل های به هم لبه پيوسته هستد که مرز نواحی را
.مشخص می کنند
محيط های چندرسانه ای2
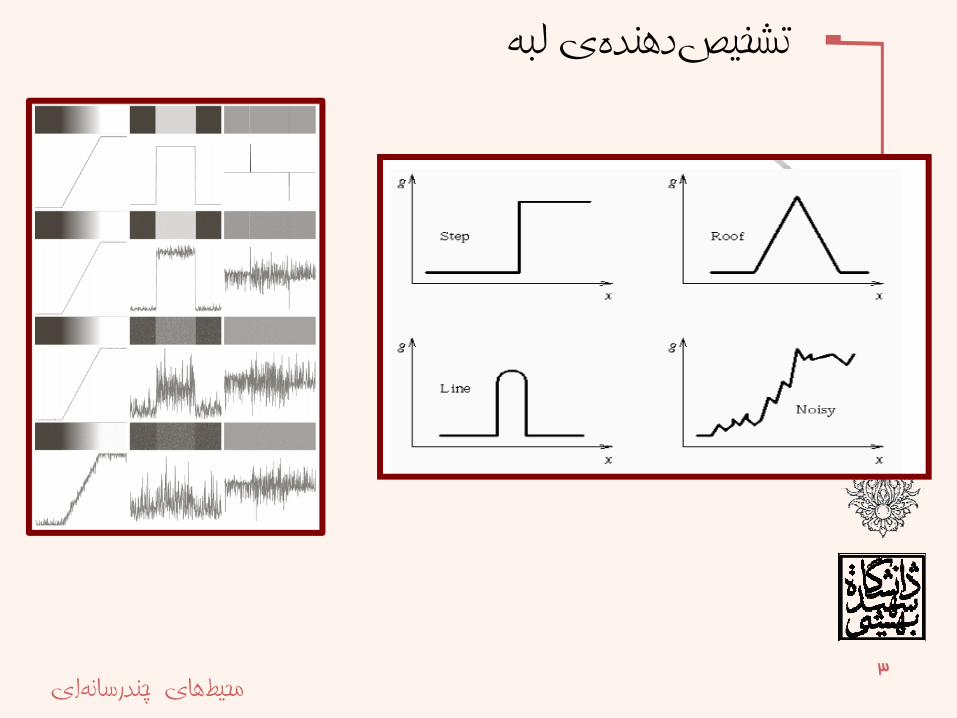
تشخيص دهنده ی لبه
3محيط های چندرسانه ای
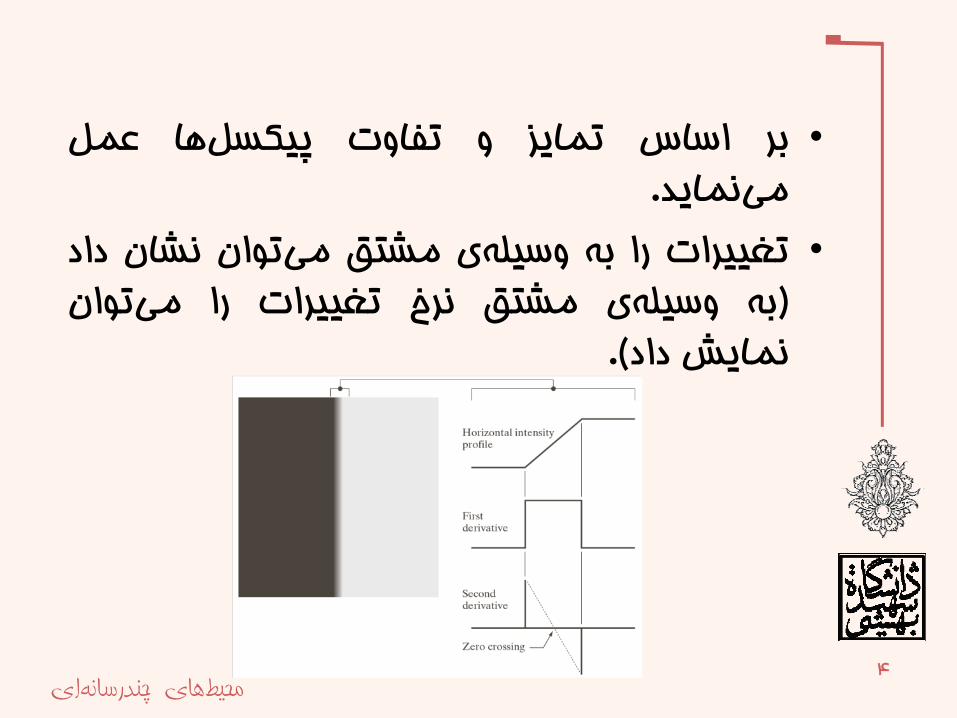
عمل پيكسل ها تفاوت و تمايز اساس بر•.مي نمايد
داد نشان مي توان مشتق وسيله ي به را تغييرات• مي توان را تغييرات نرخ مشتق وسيله ي به(
.)داد نمايش
4محيط های چندرسانه ای
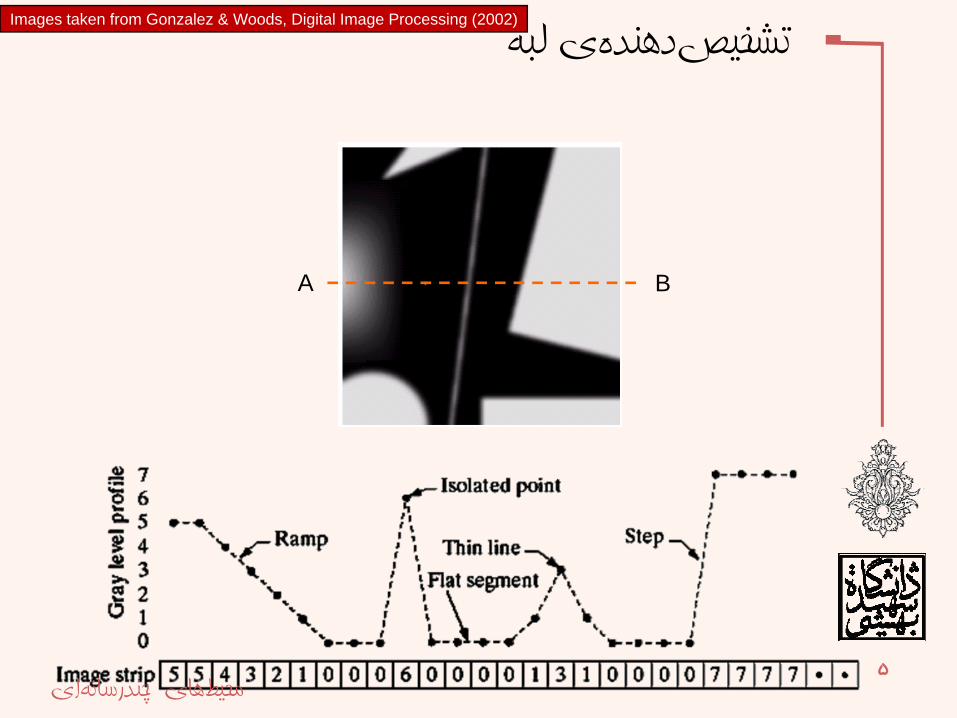
تشخيص دهنده ی لبه
A B
Images taken from Gonzalez & Woods, Digital Image Processing (2002)
5محيط های چندرسانه ای
اگر بخواهيم به صورت يك بعدي مشتق اول را •:نشان دهيم خواهيم داشت
تفاوت ميان پيكسل هاي متوالي كه نرخ تغييرات •.را نشان مي دهد
)مشتق اول(تشخيص دهنده ی لبه
( 1) ( )f f x f xx∂
= + −∂
6محيط های چندرسانه ای
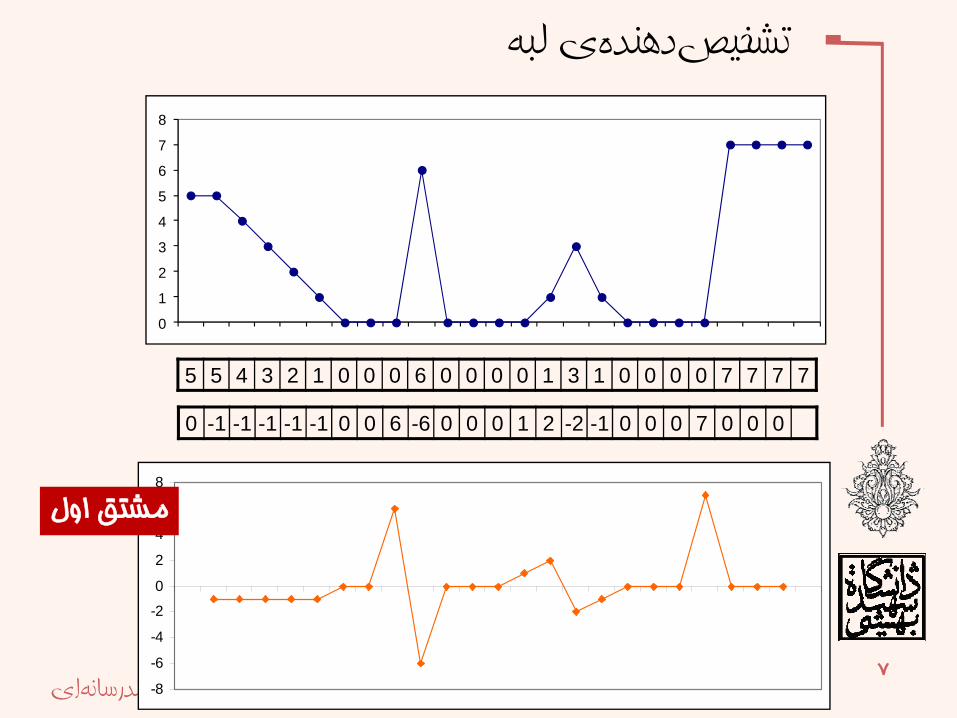
تشخيص دهنده ی لبه
0
1
2
3
4
5
6
7
8
5 5 4 3 2 1 0 0 0 6 0 0 0 0 1 3 1 0 0 0 0 7 7 7 7
0 -1 -1 -1 -1 -1 0 0 6 -6 0 0 0 1 2 -2 -1 0 0 0 7 0 0 0
78-محيط های چندرسانه ای
-6
-4
-2
0
2
4
6
مشتق اول8
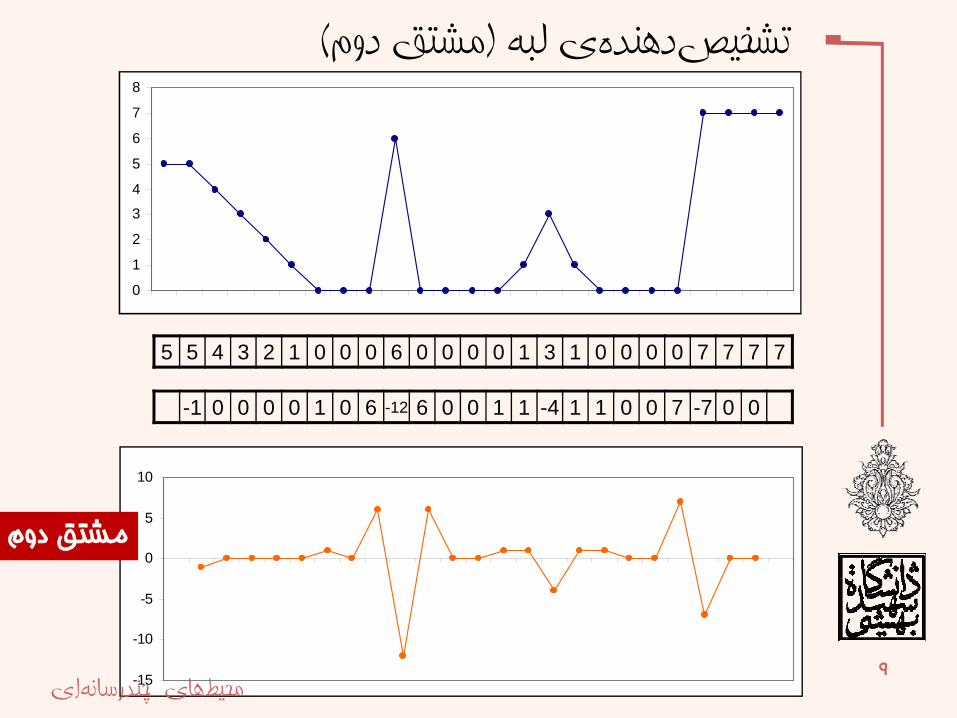
:مي شود محاسبه زير رابطه ي طريق از دوم مشتق•
از بعد و قبل پيكسل هاي مقادير دوم مشتق در•.مي شود گرفته نظر در جاري پيكسل
)مشتق دوم(تشخيص دهنده ی لبه
2
2 ( 1) ( 1) 2 ( )f f x f x f xx
∂= + + − −
∂
8محيط های چندرسانه ای
)مشتق دوم(تشخيص دهنده ی لبه
0
1
2
3
4
5
6
7
8
5 5 4 3 2 1 0 0 0 6 0 0 0 0 1 3 1 0 0 0 0 7 7 7 7
-15
-10
-5
0
5
10
-1 0 0 0 0 1 0 6 -12 6 0 0 1 1 -4 1 1 0 0 7 -7 0 0
مشتق دوم
9محيط های چندرسانه ای
تشخيص دهنده ی لبه
10محيط های چندرسانه ای
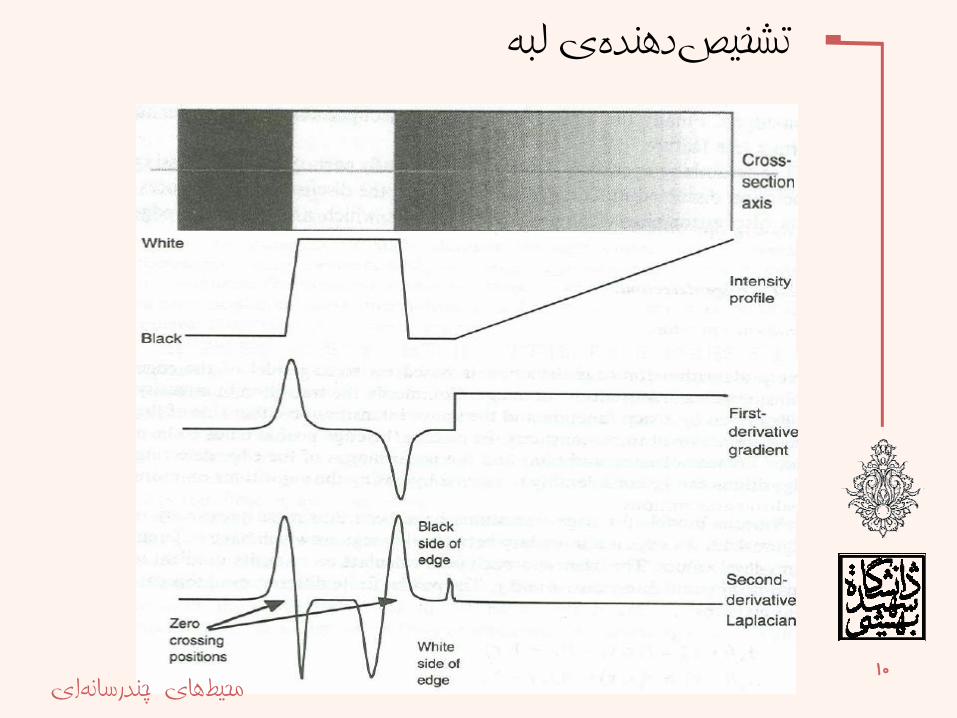
به و است حساس بسيار تغييرات به دوم مشتق• نيز تغييرات كوچك ترين آن از استفاده واسطه ي
.مي گردد ثبت قدرمطلق كه هنگامي اول مشتق از استفاده در•
خواهيم لبه باشد محلي ماكزيمم يك اول مشتق.داشت
لبه نشان گر صفر از گذر محل هاي دوم مشتق در•.بود خواهد
نکات
11محيط های چندرسانه ای
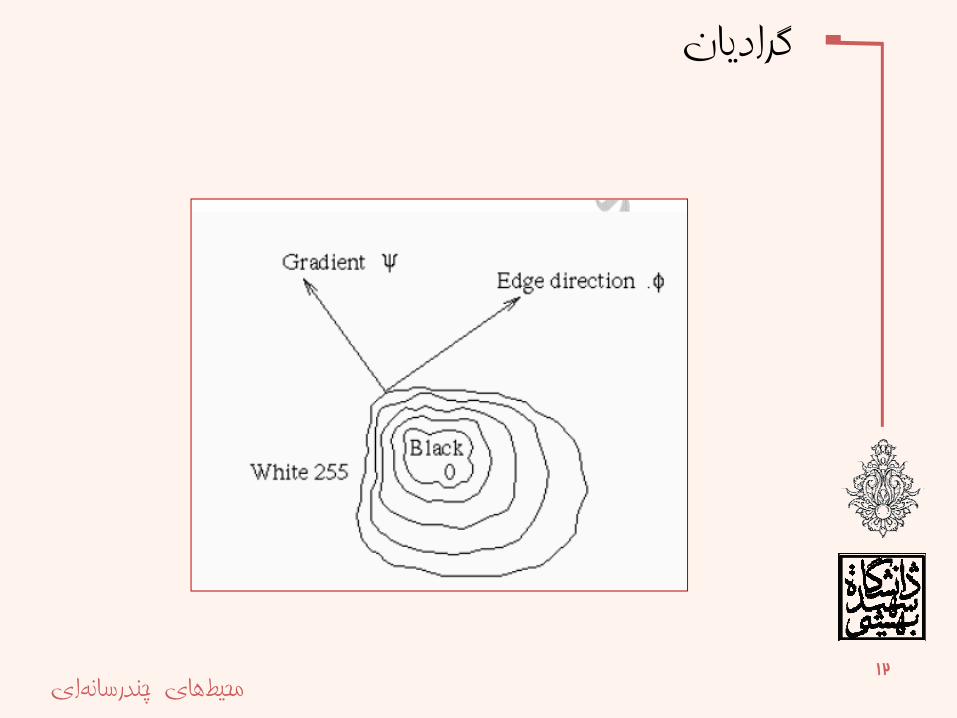
گراديان
محيط های چندرسانه ای12
12 22f f
x y
⎡ ⎤⎛ ⎞∂ ∂⎛ ⎞= +⎢ ⎥⎜ ⎟⎜ ⎟∂ ∂⎝ ⎠⎢ ⎥⎝ ⎠⎣ ⎦
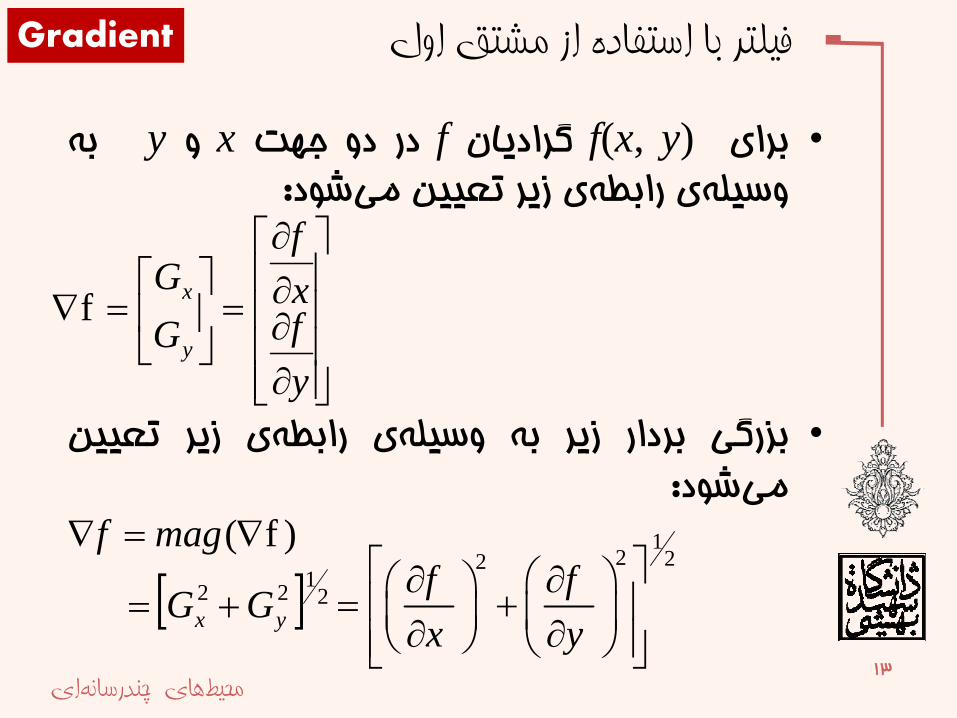
,f(x براي• y) گراديان f جهت دو در x و y به :مي شود تعيين زير رابطه ي وسيله ي
تعيين زير رابطه ي وسيله ي به زير بردار بزرگي•:مي شود
Gradientفيلتر با استفاده از مشتق اول
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂∂∂
=⎥⎦
⎤⎢⎣
⎡=∇
yfxf
GG
y
xf
)f(∇=∇ magf
[ ] 2122
yx GG +=13
محيط های چندرسانه ای
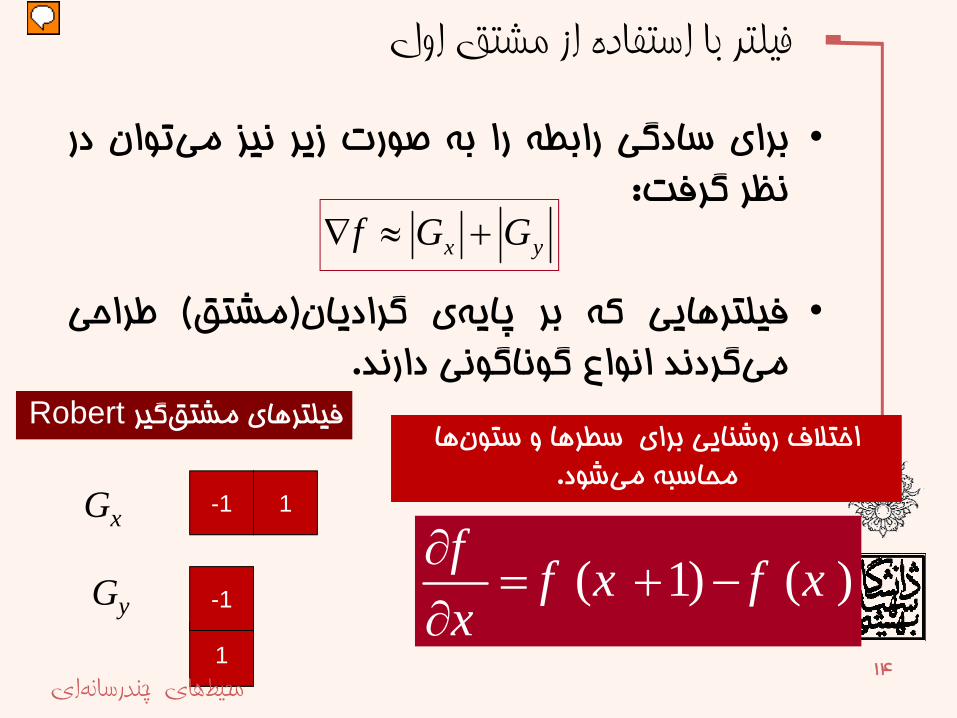
در مي توان نيز زير صورت به را رابطه سادگي براي•:گرفت نظر
طراحي )مشتق(گراديان پايه ي بر كه فيلتر هايي•.دارند گوناگوني انواع مي گردند
فيلتر با استفاده از مشتق اول
yx GGf +≈∇
-1 1
1
Gx
Gy -1 ( 1) ( )f f x f xx∂
= + −∂
ستون ها و اختالف روشنايي براي سطرها .محاسبه مي شود
14محيط های چندرسانه ای
Robertفيلتر هاي مشتق گير
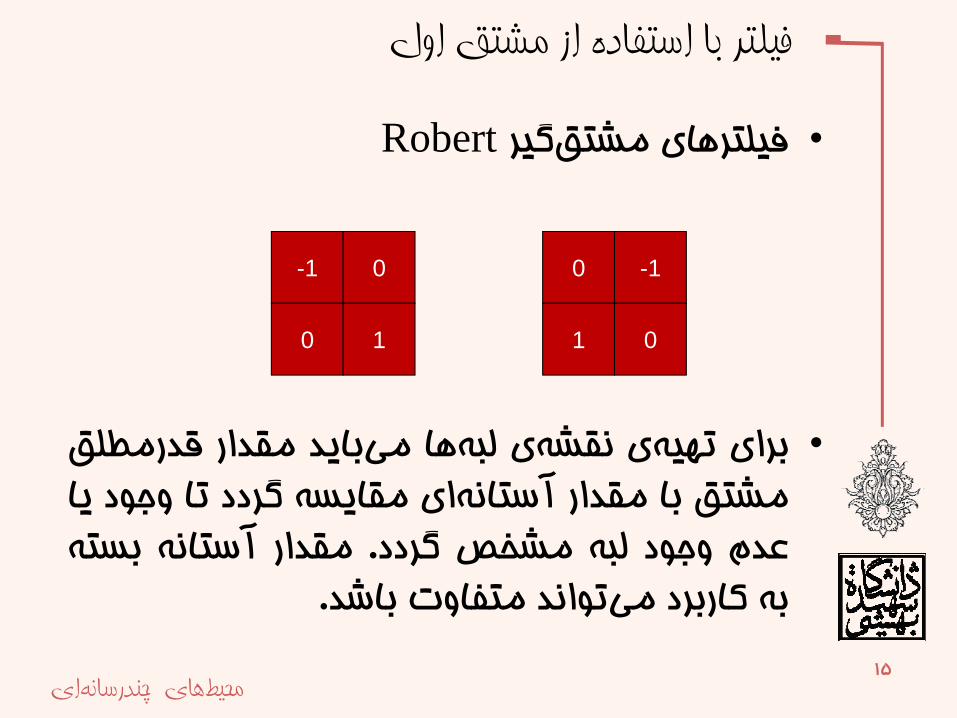
Robertفيلتر هاي مشتق گير •
قدرمطلق مقدار مي بايد لبه ها نقشه ي تهيه ي براي• يا وجود تا گردد مقايسه آستانه اي مقدار با مشتق بسته آستانه مقدار .گردد مشخص لبه وجود عدم.باشد متفاوت مي تواند كاربرد به
فيلتر با استفاده از مشتق اول
-1 0
0 1
-10
01
15محيط های چندرسانه ای
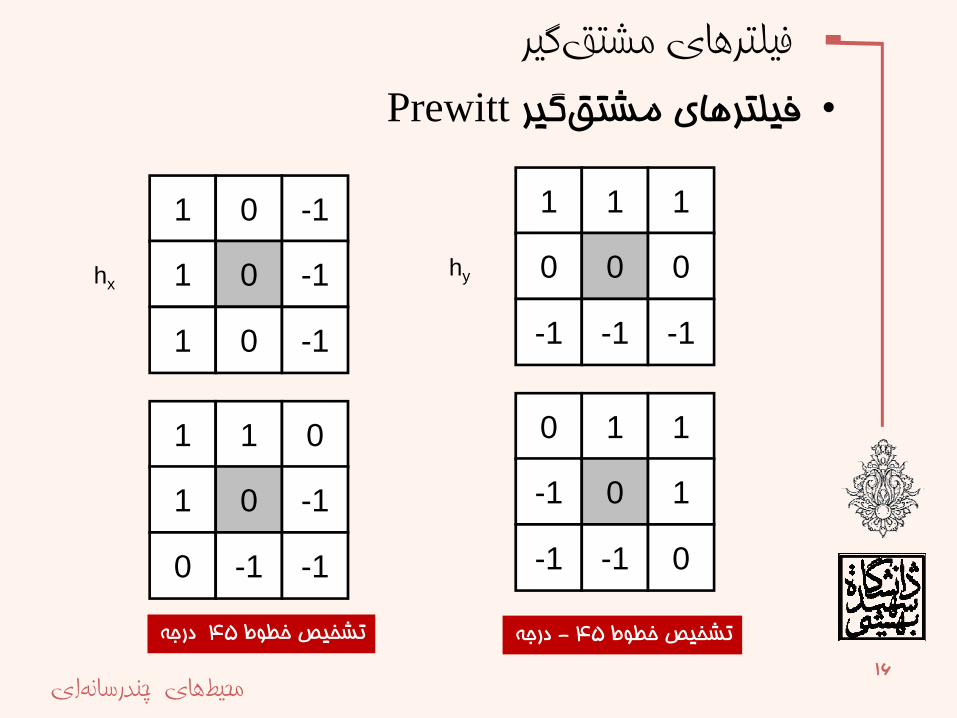
Prewittفيلتر هاي مشتق گير •فيلتر های مشتق گير
1 1 1
0 0 0
-1 -1 -1
hyhx
1 0 -1
1 0 -1
1 0 -1
0 1 1
-1 0 1
-1 -1 0
1 1 0
1 0 -1
0 -1 -1
درجه 45تشخيص خطوط درجه - 45تشخيص خطوط 16
محيط های چندرسانه ای
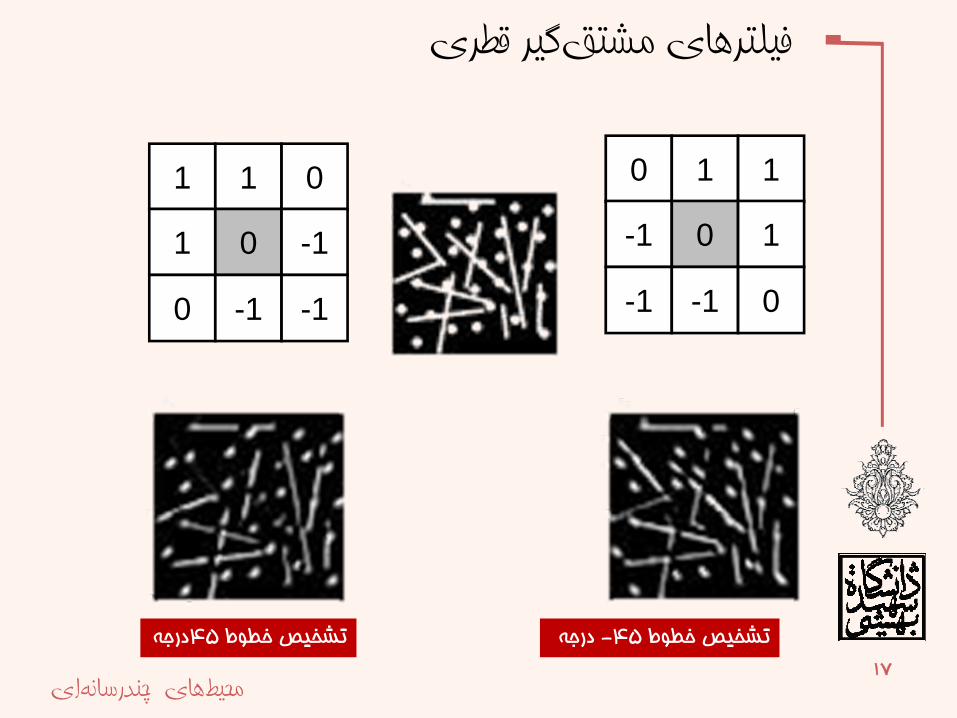
فيلتر های مشتق گير قطری
درجه45تشخيص خطوط درجه -45تشخيص خطوط
0 1 1
-1 0 1
-1 -1 0
1 1 0
1 0 -1
0 -1 -1
17محيط های چندرسانه ای
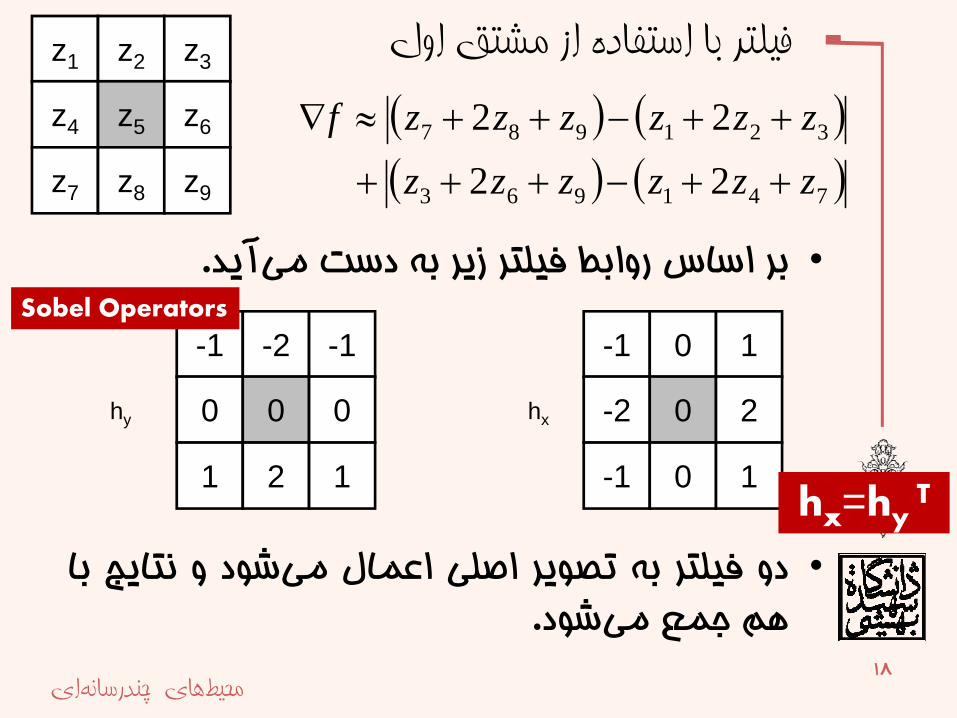
.بر اساس روابط فيلتر زير به دست مي آيد•
با نتايج و مي شود اعمال اصلي تصوير به فيلتر دو•.مي شود جمع هم
فيلتر با استفاده از مشتق اول
( ) ( )321987 22 zzzzzzf ++−++≈∇
( ) ( )741963 22 zzzzzz ++−+++
z1 z2 z3
z4 z5 z6
z7 z8 z9
-1 -2 -1
0 0 0
1 2 1
-1 0 1
-2 0 2
-1 0 1
Sobel Operators
hy hx
hx=hyT
18محيط های چندرسانه ای
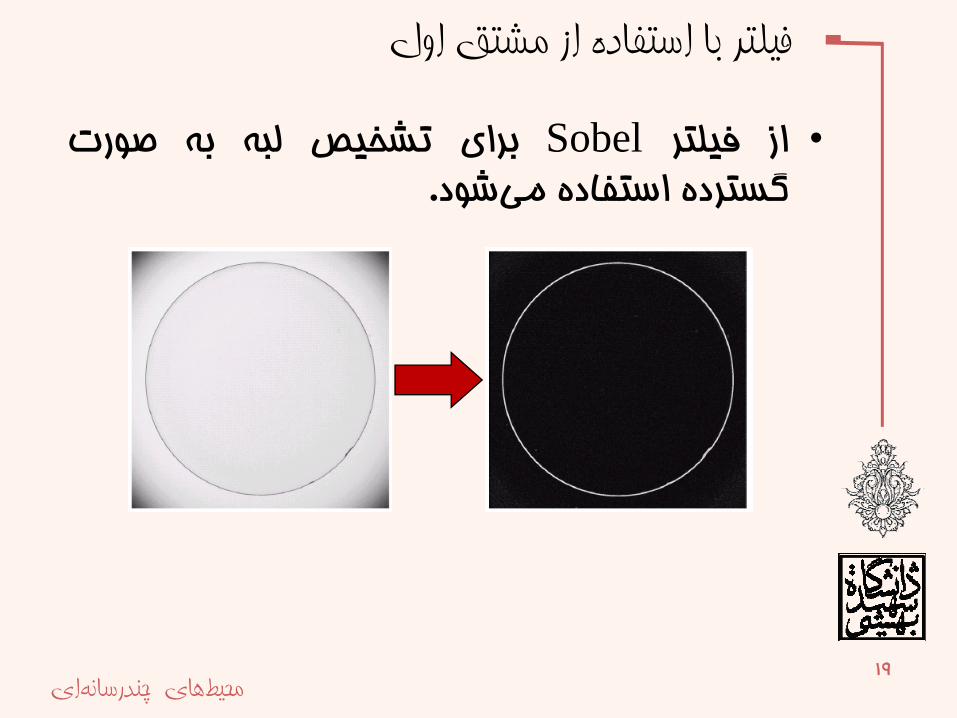
صورت به لبه تشخيص براي Sobel فيلتر از•.مي شود استفاده گسترده
فيلتر با استفاده از مشتق اول
19محيط های چندرسانه ای
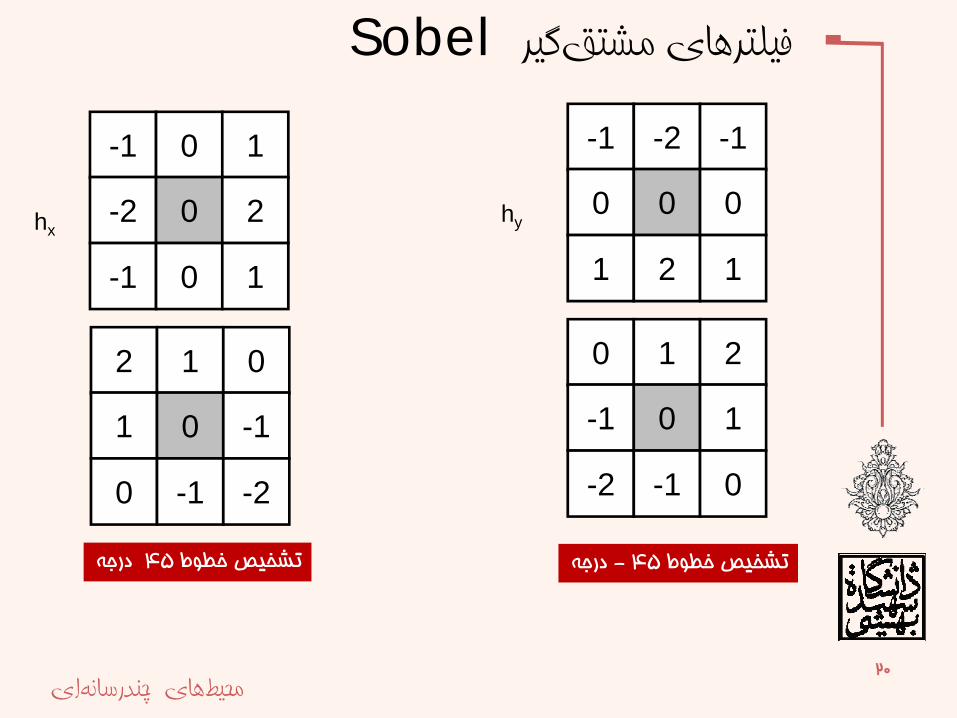
Sobelفيلتر های مشتق گير
-1 -2 -1
0 0 0
1 2 1
-1 0 1
-2 0 2
-1 0 1
hyhx
0 1 2
-1 0 1
-2 -1 0
2 1 0
1 0 -1
0 -1 -2
درجه 45تشخيص خطوط درجه - 45تشخيص خطوط
20محيط های چندرسانه ای
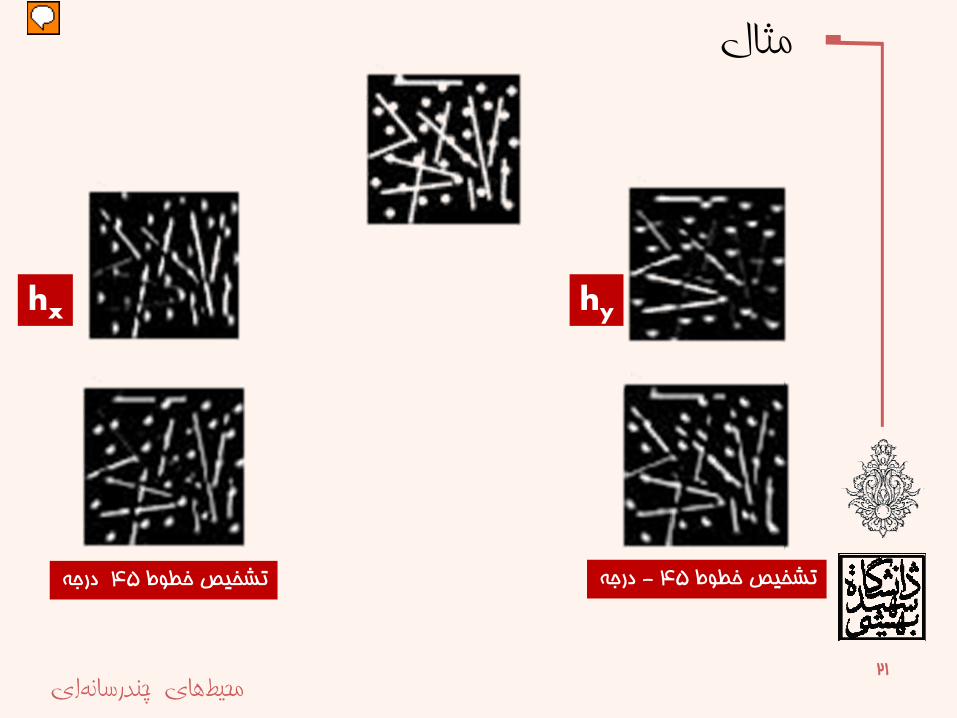
مثال
hx hy
درجه 45تشخيص خطوط درجه - 45تشخيص خطوط
21محيط های چندرسانه ای
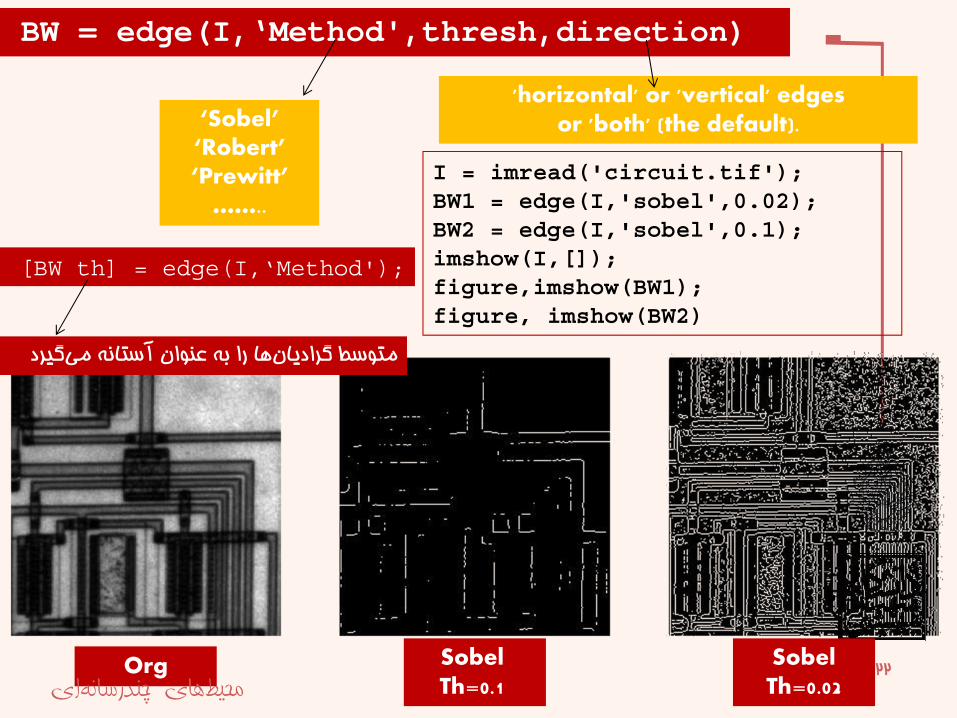
SobelTh=0.1
BW = edge(I,‘Method',thresh,direction)
'horizontal' or 'vertical' edgesor 'both' (the default).‘Sobel’
‘Robert’‘Prewitt’
……..
Org Sobel Th=0.02
I = imread('circuit.tif');BW1 = edge(I,'sobel',0.02);BW2 = edge(I,'sobel',0.1);imshow(I,[]);figure,imshow(BW1);figure, imshow(BW2)
[BW th] = edge(I,‘Method');
متوسط گراديان ها را به عنوان آستانه مي گيرد
22محيط های چندرسانه ای
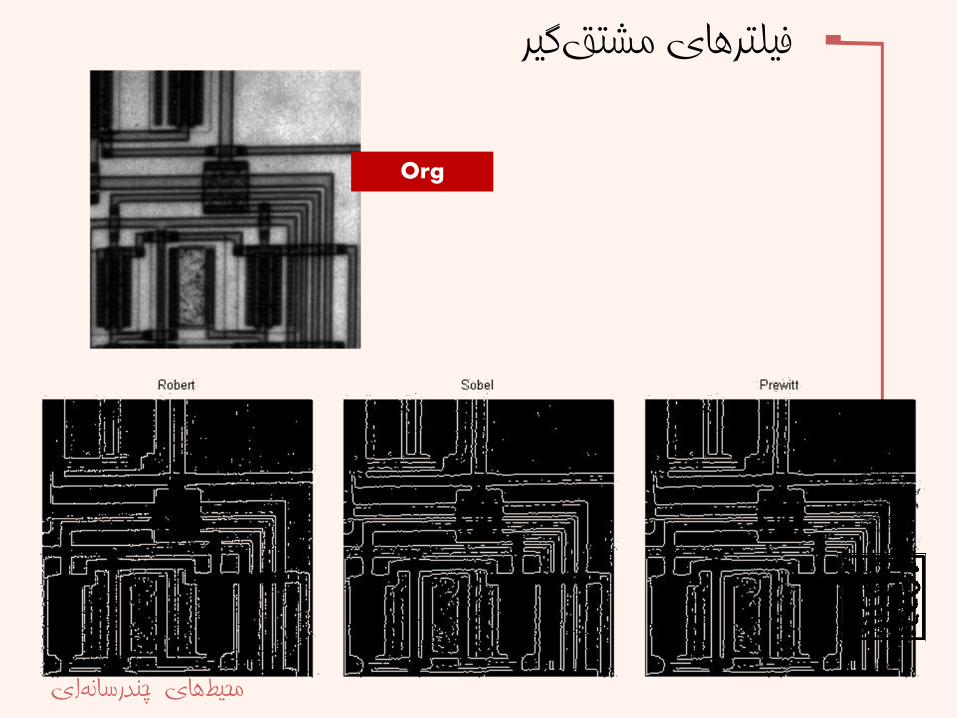
فيلتر های مشتق گير
Org
23محيط های چندرسانه ای
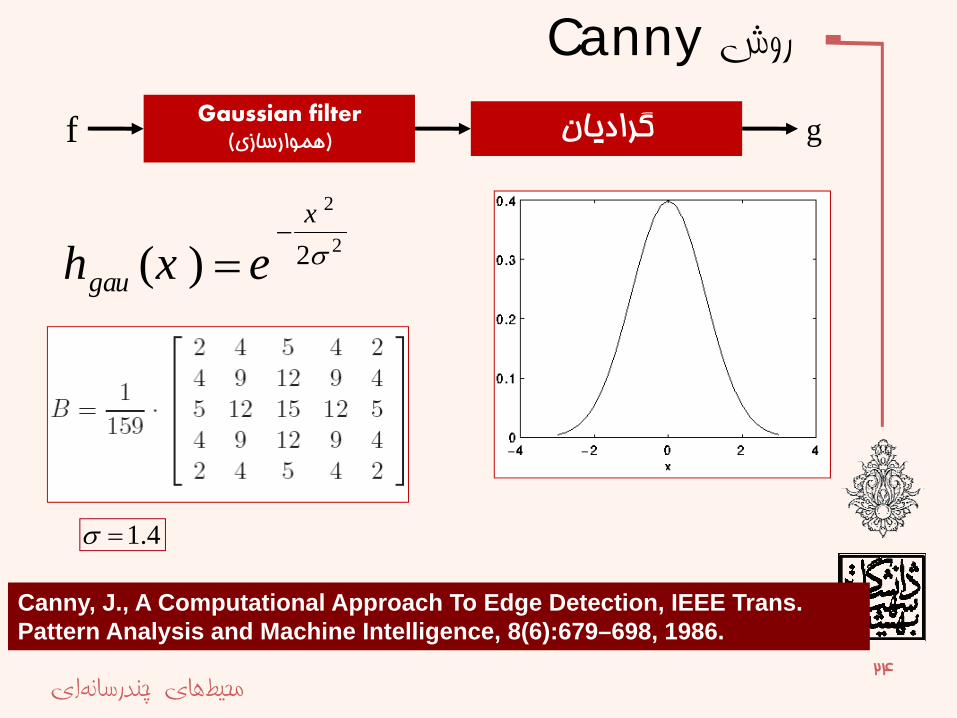
Cannyروش Gaussian filter
f)هموارسازي( گراديان2
22( )x
gauh x e σ−
=
g
1.4σ =
24محيط های چندرسانه ای
Canny, J., A Computational Approach To Edge Detection, IEEE Trans. Pattern Analysis and Machine Intelligence, 8(6):679–698, 1986.
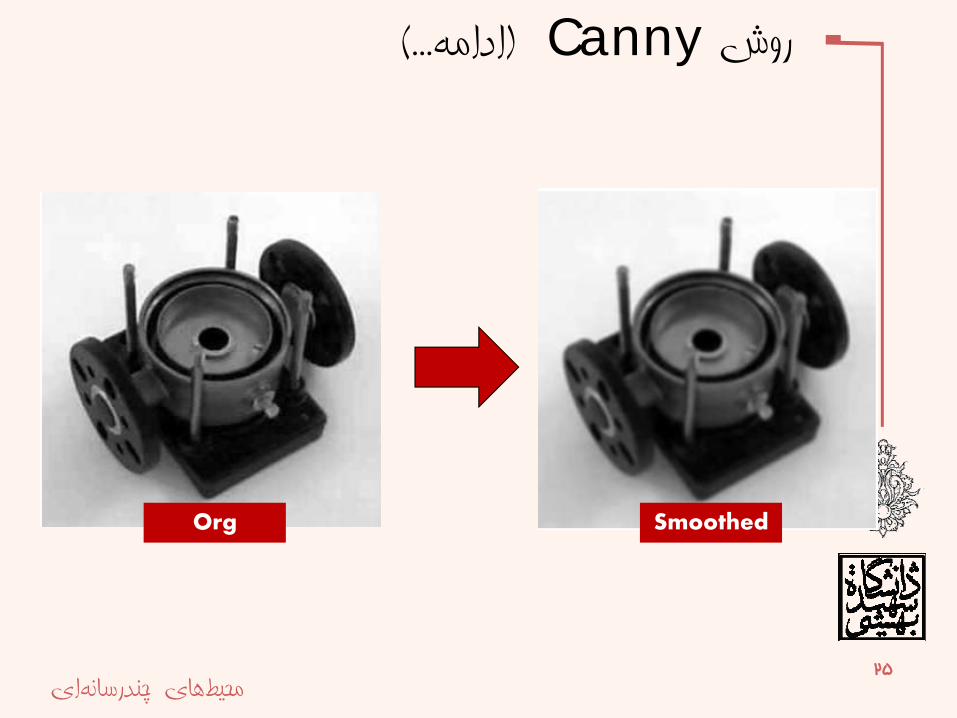
...)ادامه(Cannyروش
Org Smoothed
25محيط های چندرسانه ای
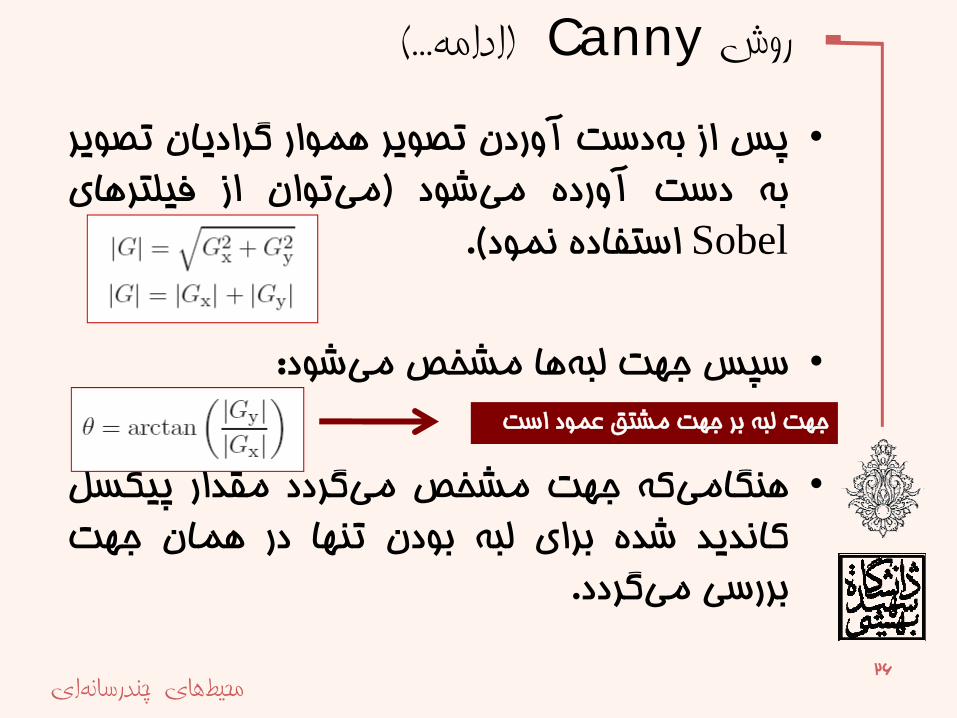
تصوير گراديان هموار تصوير آوردن به دست از پس• فيلتر هاي از مي توان( مي شود آورده دست به
Sobel نمود استفاده(.
:سپس جهت لبه ها مشخص مي شود•
پيكسل مقدار مي گردد مشخص جهت هنگامي كه• جهت همان در تنها بودن لبه براي شده كانديد.مي گردد بررسي
...)ادامه(Cannyروش
جهت لبه بر جهت مشتق عمود است
26محيط های چندرسانه ای
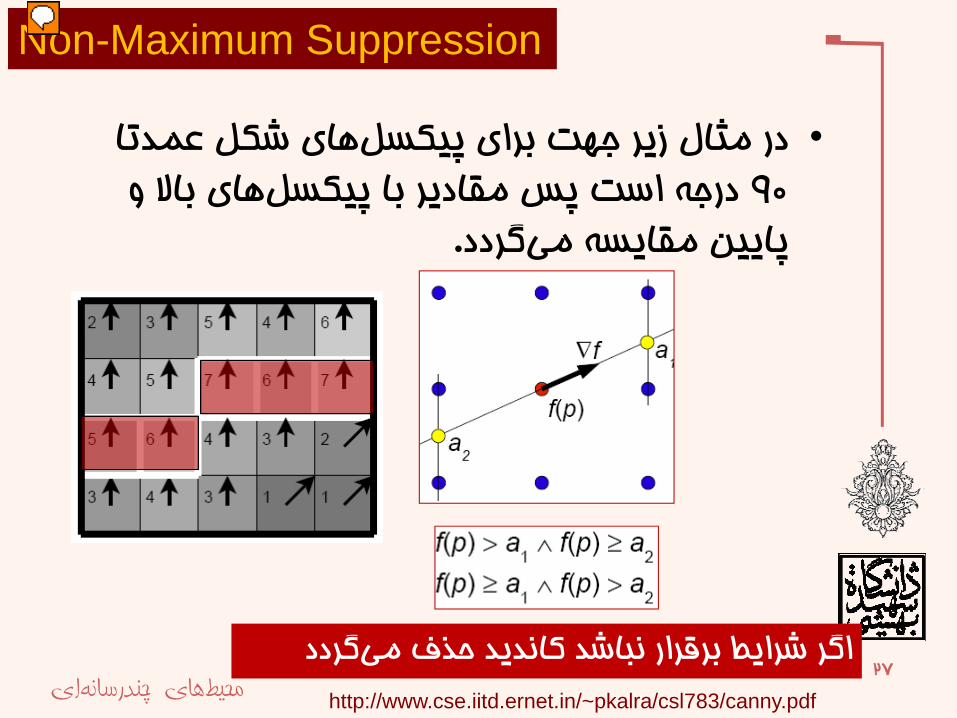
در مثال زير جهت براي پيكسل هاي شكل عمدتا •درجه است پس مقادير با پيكسل هاي باال و 90
.پايين مقايسه مي گردد
مي گردداگر شرايط بر قرار نباشد كانديد حذف محيط های چندرسانه ای
27
Non-Maximum Suppression
http://www.cse.iitd.ernet.in/~pkalra/csl783/canny.pdf
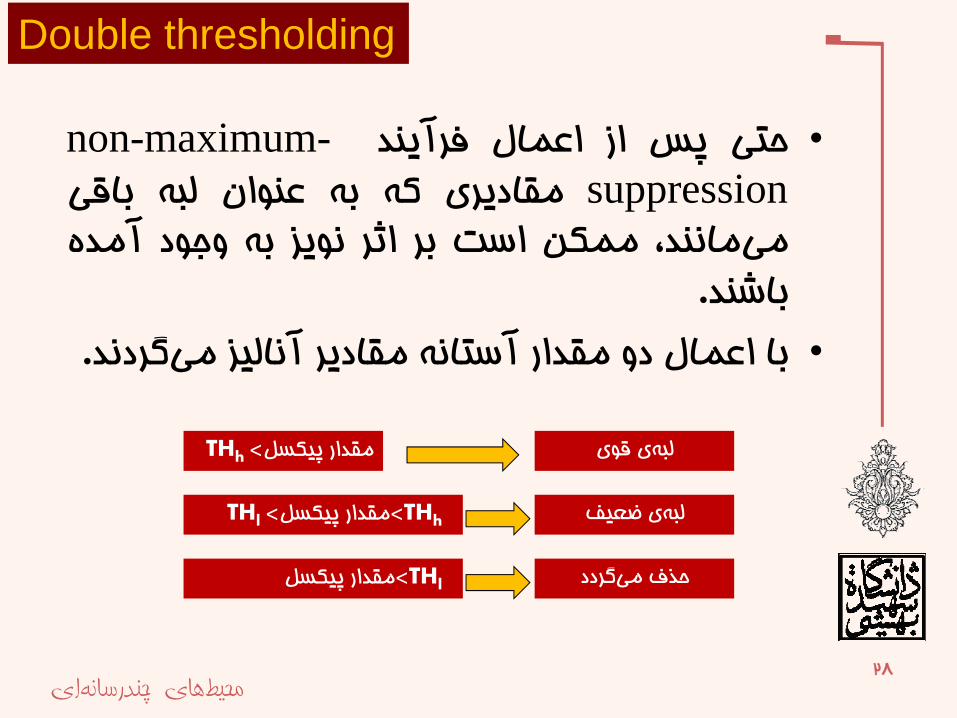
-non-maximum فرآيند اعمال از پس حتي•suppression باقي لبه عنوان به كه مقاديري
آمده وجود به نويز اثر بر است ممكن مي مانند،.باشند
.با اعمال دو مقدار آستانه مقادير آناليز مي گردند•> THhمقدار پيكسل
<THh مقدار پيكسلTHl <
لبه ي قوي
لبه ي ضعيف
<THl مقدار پيكسل حذف مي گردد
28محيط های چندرسانه ای
Double thresholding
.است لبه باشد بزرگ ترTHhاز پيكسل مقدار اگر•
مي كنيم، جستجو نظر مورد پيكسل همسايگي در• غير در .است لبه همچنان نشود كم ترTHl از اگر
از كه است لبه زماني بعدي پيكسل اينصورتTHhباشد بزرگ تر .
29محيط های چندرسانه ای
Edge tracking by hysteresis
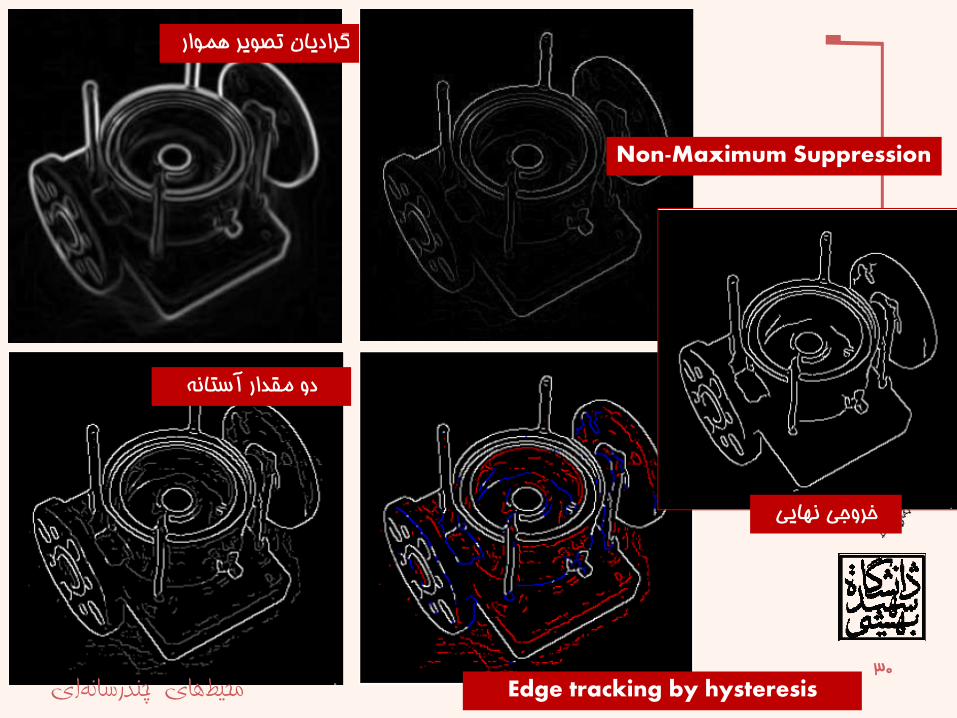
تصوير هموار گراديان
Non-Maximum Suppression
دو مقدار آستانه
Edge tracking by hysteresis
خروجي نهايي
30محيط های چندرسانه ای
...)ادامه(Cannyروش
محيط های چندرسانه ای31
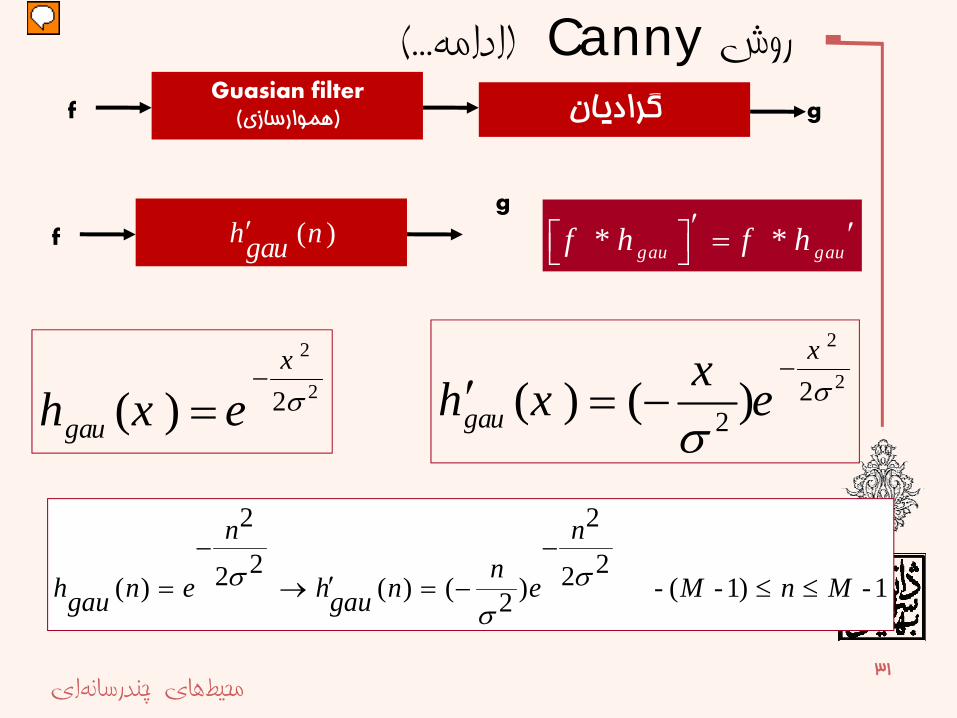
Guasian filterf)هموارسازي( گراديان
2
22( )x
gauh x e σ−
=
g
2
222( ) ( )
x
gauxh x e σ
σ−
′ = −
2 2
2 22 2( ) ( ) ( ) - ( -1) -12
n nn
h n e h n e M n Mgau gauσ σ
σ
− −′= → = − ≤ ≤
f
g
( )h ngau′ * *gau gauf h f h′ ′⎡ ⎤ =⎣ ⎦
فيلتر الپالسين
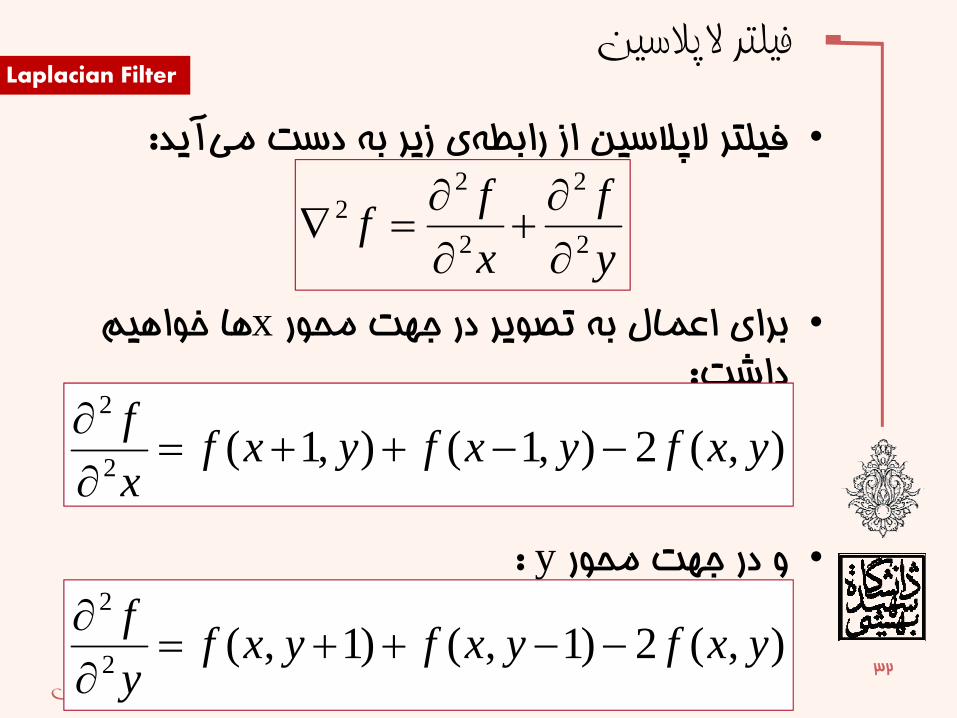
:فيلتر الپالسين از رابطه ي زير به دست مي آيد•
ها خواهيم xبراي اعمال به تصوير در جهت محور •:داشت
: yو در جهت محور •
محيط های چندرسانه ای32
yf
xff 2
2
2
22
∂∂
+∂∂
=∇
Laplacian Filter
),(2),1(),1(2
2
yxfyxfyxfxf
−−++=∂∂
),(2)1,()1,(2
2
yxfyxfyxfyf
−−++=∂∂
فيلتر الپالسين
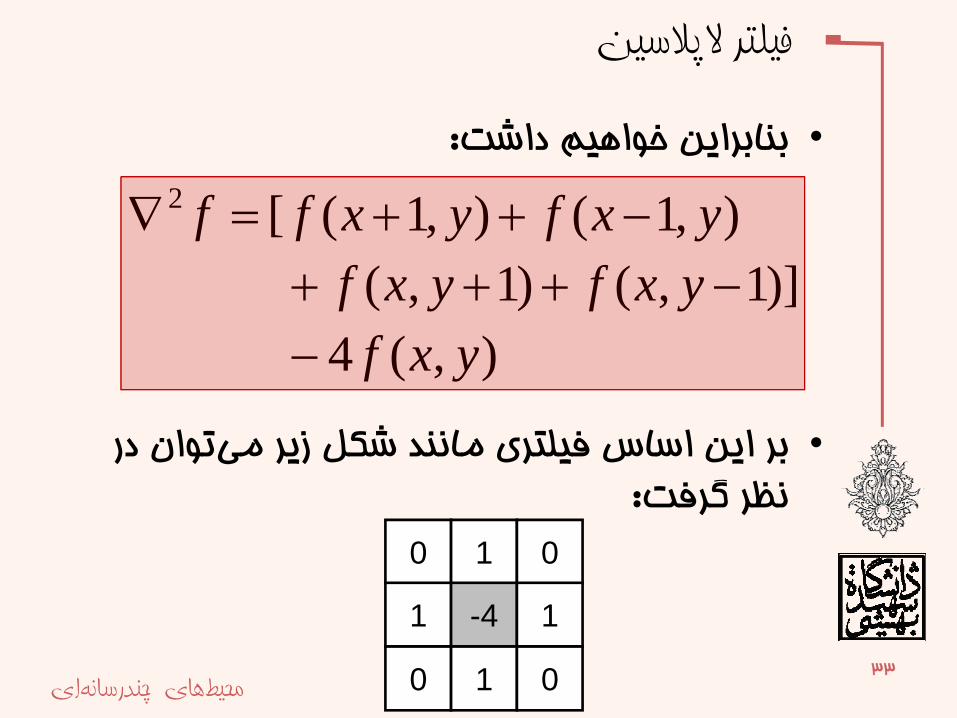
:بنابراين خواهيم داشت•
بر اين اساس فيلتري مانند شكل زير مي توان در •:نظر گرفت
محيط های چندرسانه ای33
),1(),1([2 yxfyxff −++=∇)]1,()1,( −+++ yxfyxf
),(4 yxf−
0 1 0
1 -4 1
0 1 0
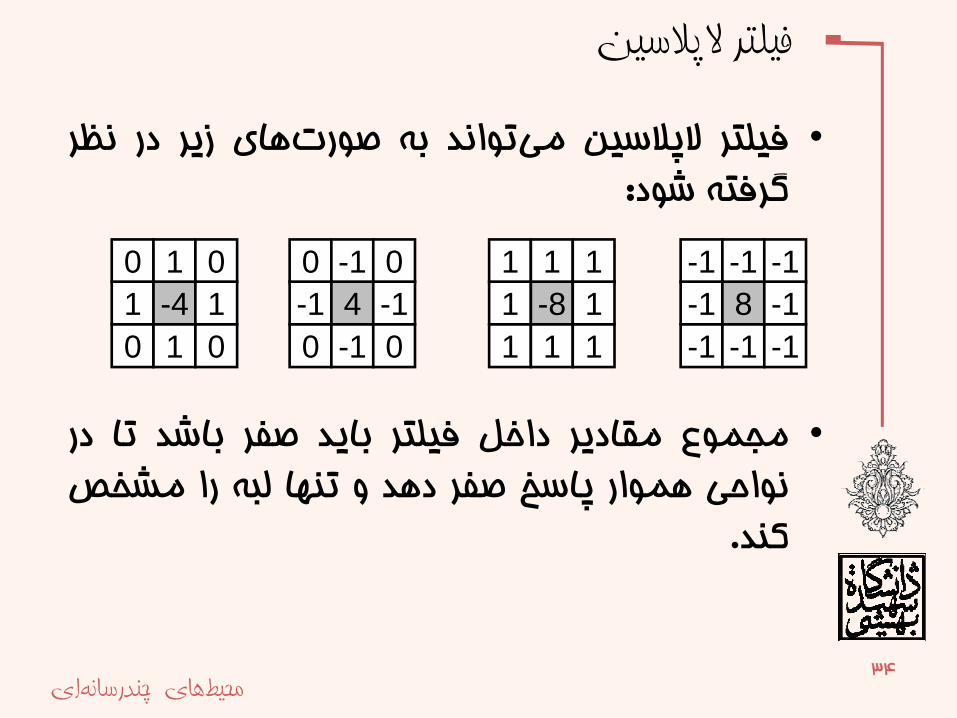
نظر در زير صورت هاي به مي تواند الپالسين فيلتر•:شود گرفته
در تا باشد صفر بايد فيلتر داخل مقادير مجموع• مشخص را لبه تنها و دهد صفر پاسخ هموار نواحي.كند
فيلتر الپالسين
0 1 01 -4 10 1 0
0 1- 0-1 4 -10 -1 0
1 1 11 8- 11 1 1
1- 1- 1-1- 8 1-1- 1- 1-
34محيط های چندرسانه ای

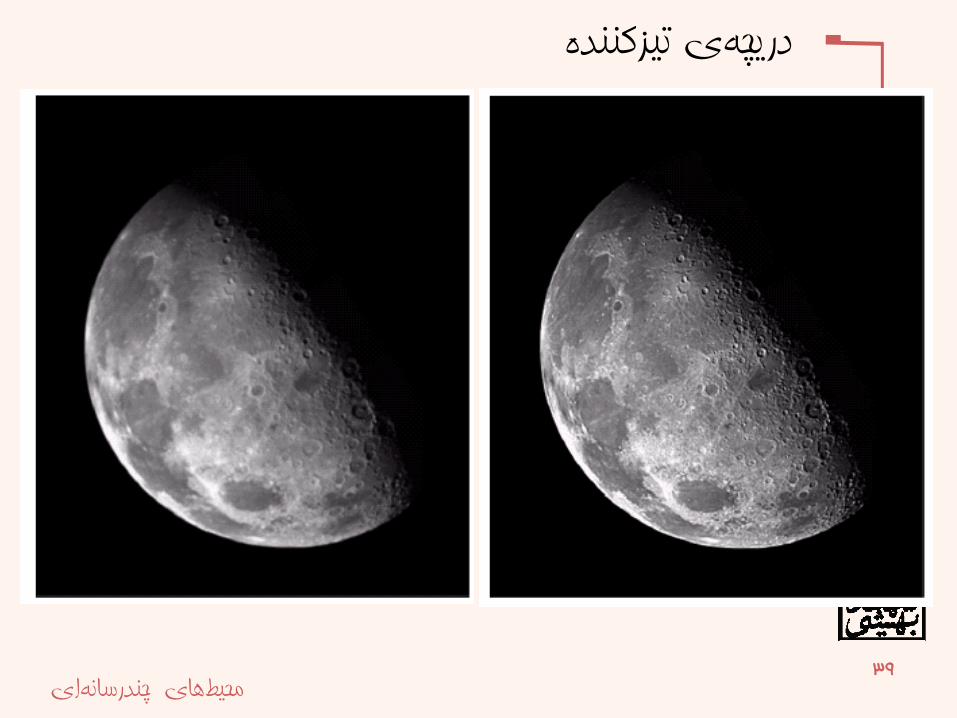
هنگامي كه فيلتر الپالسين به تصوير اعمال گردد، •.جزييات و لبه هاي تصوير بهتر آشكار خواهد شد
فيلتر الپالسين
Org image Laplacian Filtered
Images taken from Gonzalez & Woods, Digital Image Processing (2002)
h = fspecial('laplacian', alpha);
محيط های چندرسانه ای35
جزييات و لبه ها شدن آشكار بيشتر چه هر براي•:نمود عمل زير طريق به مي توان تصوير
الپالسين فيلتر در مركزي پيكسل كه اين به بسته•.است متفاوت c باشد منفي يا مثبت
دريچه ی تيز کننده
2( , ) ( , ) [ ( , )]g x y f x y c f x y= + ∇
36محيط های چندرسانه ای
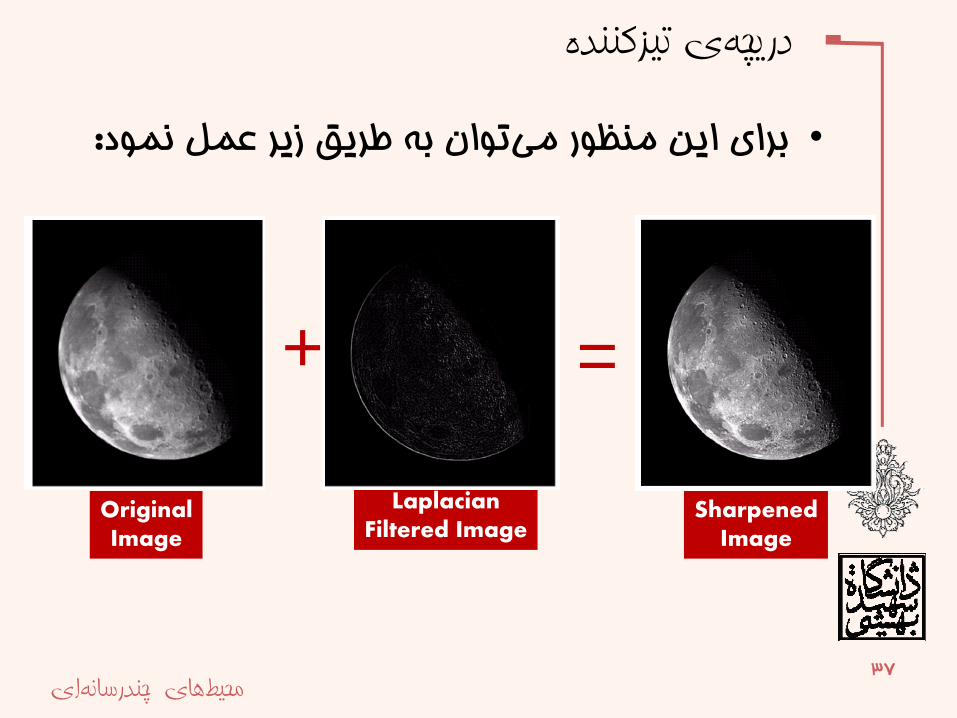
:براي اين منظور مي توان به طريق زير عمل نمود•دريچه ی تيز کننده
+ =
OriginalImage
LaplacianFiltered Image
SharpenedImage
37محيط های چندرسانه ای
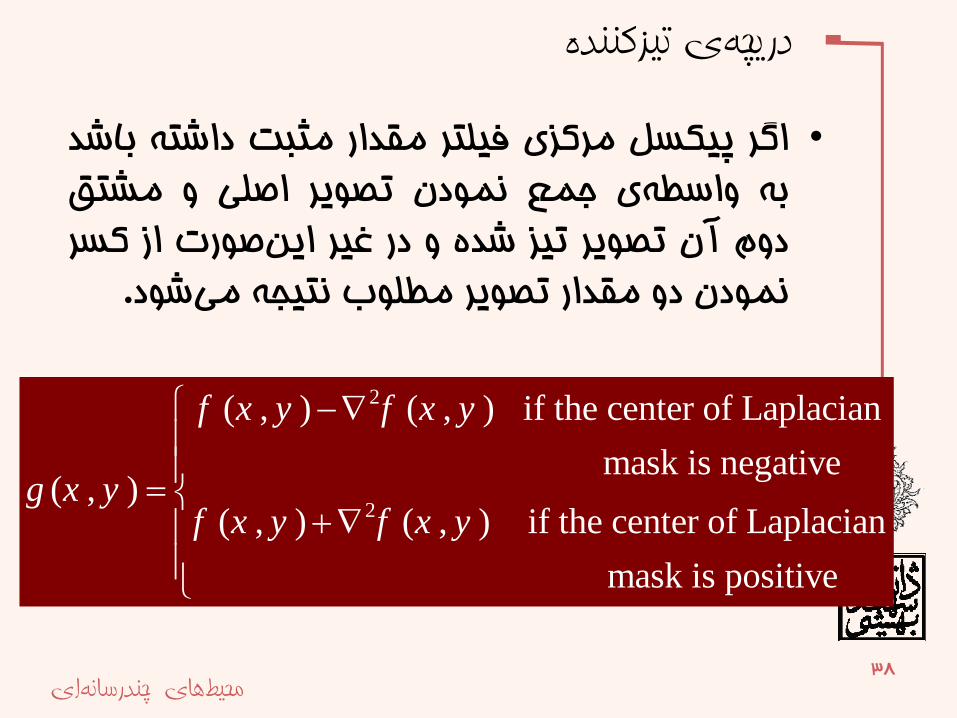
باشد داشته مثبت مقدار فيلتر مركزي پيكسل اگر• مشتق و اصلي تصوير نمودن جمع واسطه ي به
كسر از اين صورت غير در و شده تيز تصوير آن دوم.مي شود نتيجه مطلوب تصوير مقدار دو نمودن
دريچه ی تيز کننده
2
2
( , ) ( , ) if the center of Laplacian mask is negative
( , )( , ) ( , ) if the center of Laplacian
f x y f x y
g x yf x y f x y
−∇
=+∇
mask is positive
⎧⎪⎪⎨⎪⎪⎩
محيط های چندرسانه ای38
دريچه ی تيز کننده
محيط های چندرسانه ای39
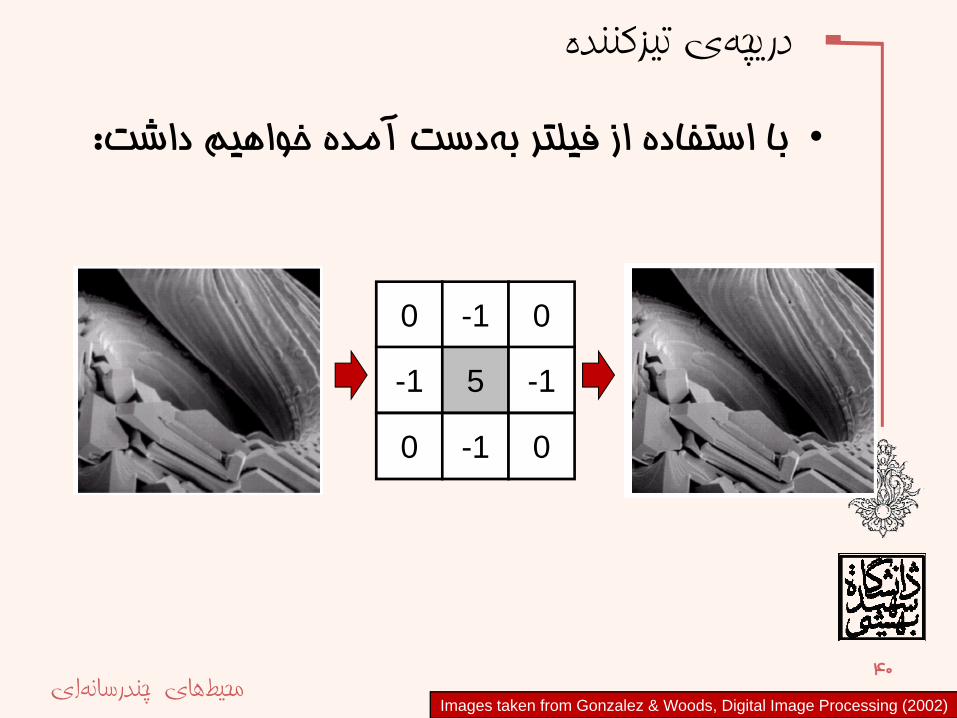
:با استفاده از فيلتر به دست آمده خواهيم داشت•دريچه ی تيز کننده
0 -1 0
-1 5 -1
0 -1 0
Images taken from Gonzalez & Woods, Digital Image Processing (2002)محيط های چندرسانه ای
40

دريچه ی تيز کننده
Org image Sharped image
I = imread('barb.gif');W=[0 -1 0; -1 5 -1;0 -1 0]; gd=imfilter(I,w);imshow(I)figure, imshow(gd,[]);
محيط های چندرسانه ای41
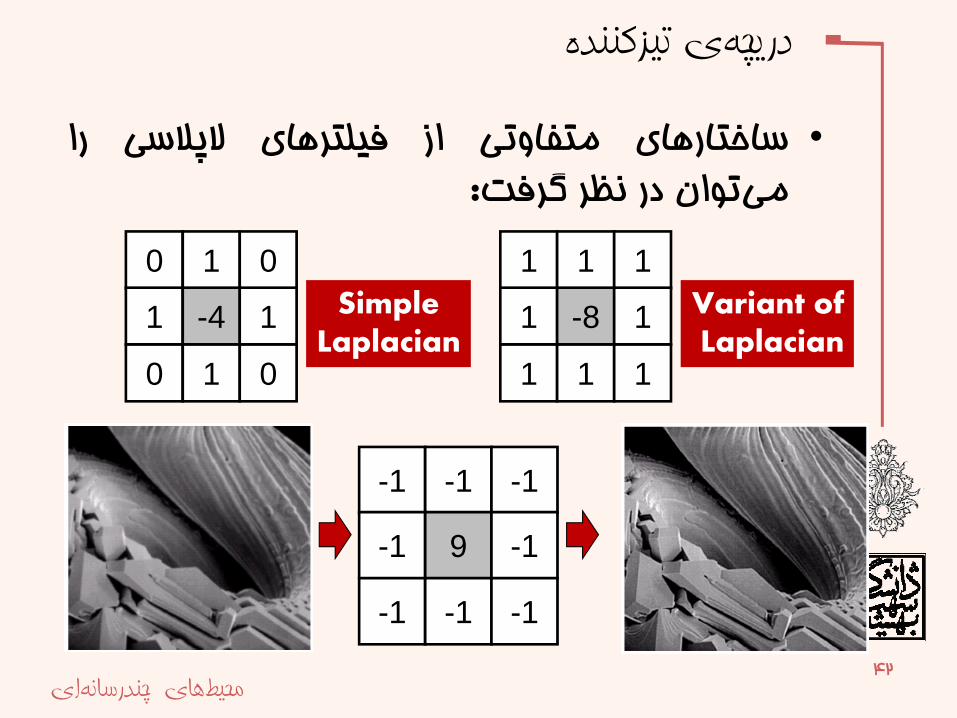
-1 -1 -1
-1 9 -1
-1 -1 -1
را الپالسي فيلتر هاي از متفاوتي ساختار هاي•:گرفت نظر در مي توان
دريچه ی تيز کننده
0 1 0
1 4- 1
0 1 0
1 1 1
1 -8 1
1 1 1
SimpleLaplacian
Variant ofLaplacian
محيط های چندرسانه ای42
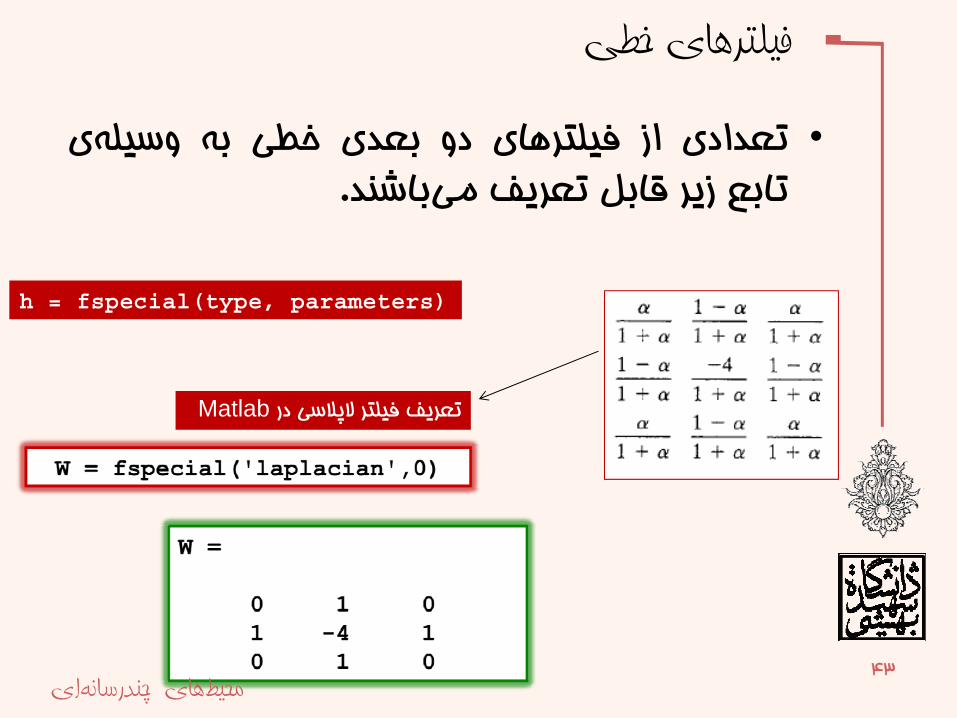
وسيله ي به خطي بعدي دو فيلتر هاي از تعدادي•.مي باشند تعريف قابل زير تابع
فيلتر های خطی
h = fspecial(type, parameters)
Matlabالپالسي در فيلتر تعريف
محيط های چندرسانه ای43
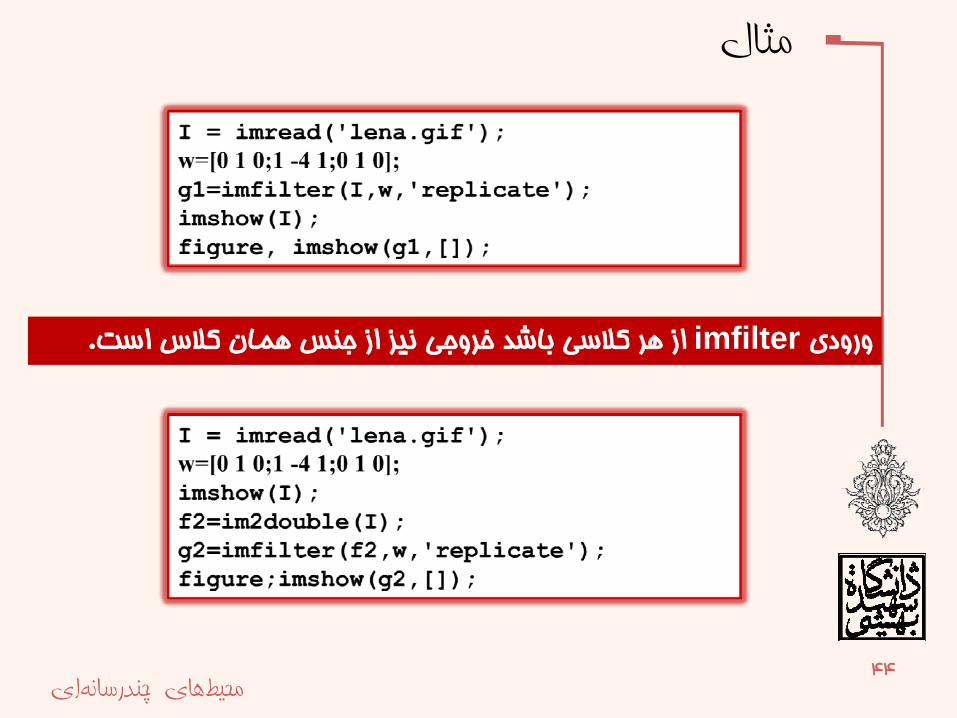
مثال
.از هر كالسي باشد خروجي نيز از جنس همان كالس است imfilterورودي
محيط های چندرسانه ای44

Org
doubleUint8
محيط های چندرسانه ای45
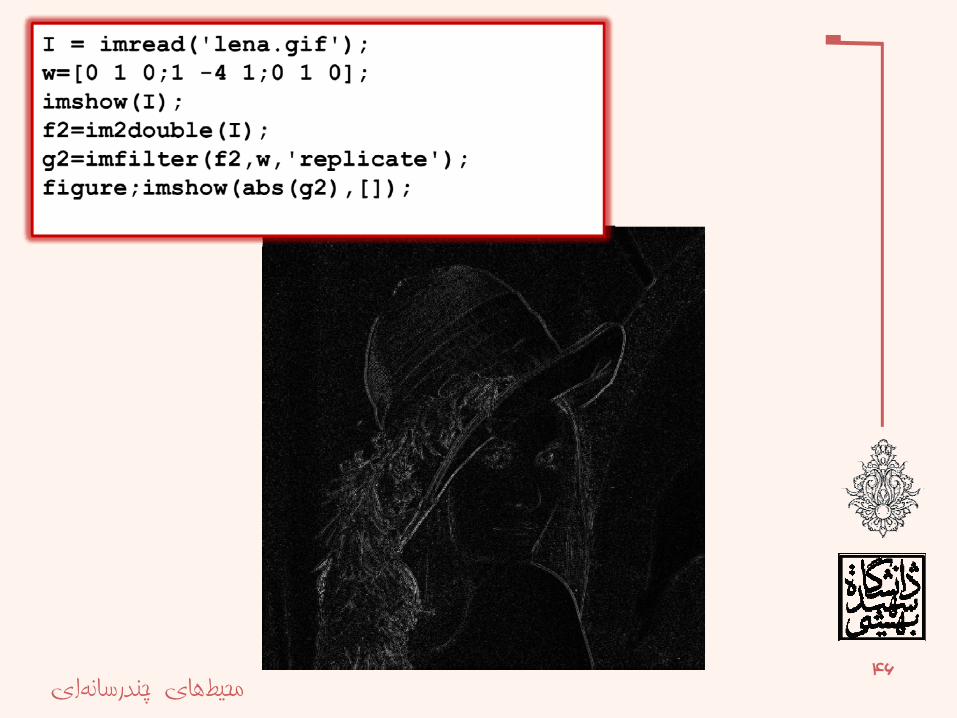
محيط های چندرسانه ای46
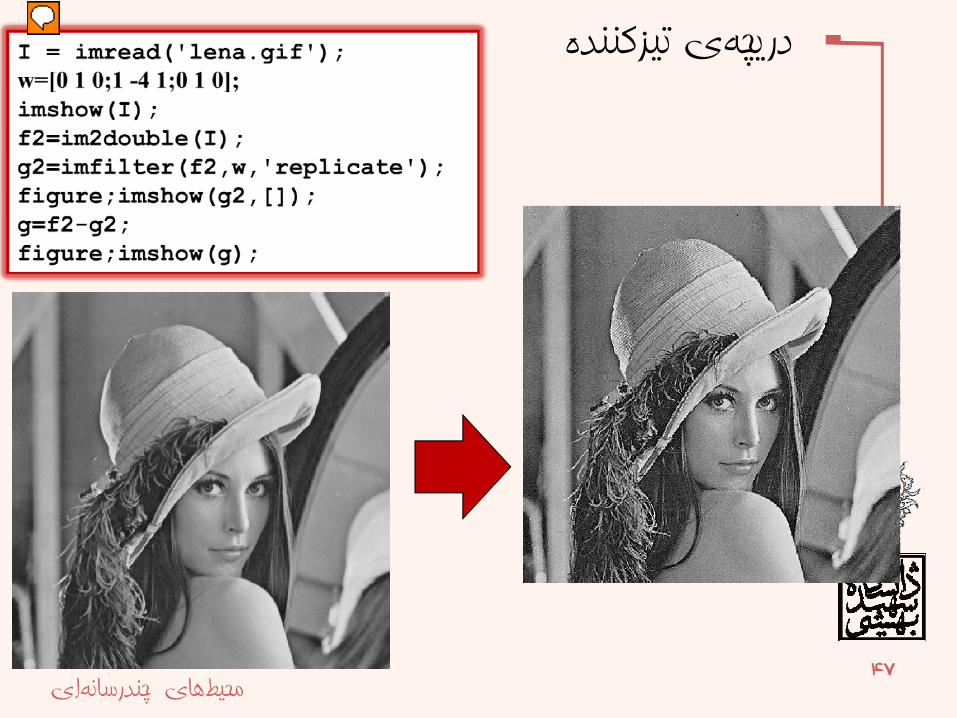
دريچه ی تيز کننده
محيط های چندرسانه ای47
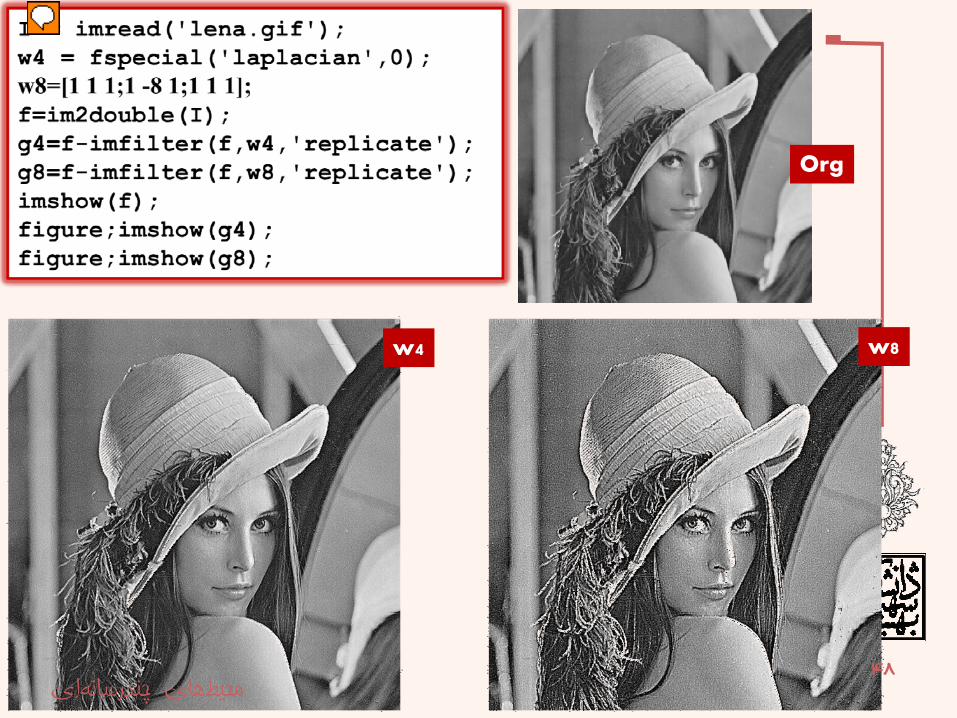
Org
w4 w8
محيط های چندرسانه ای48
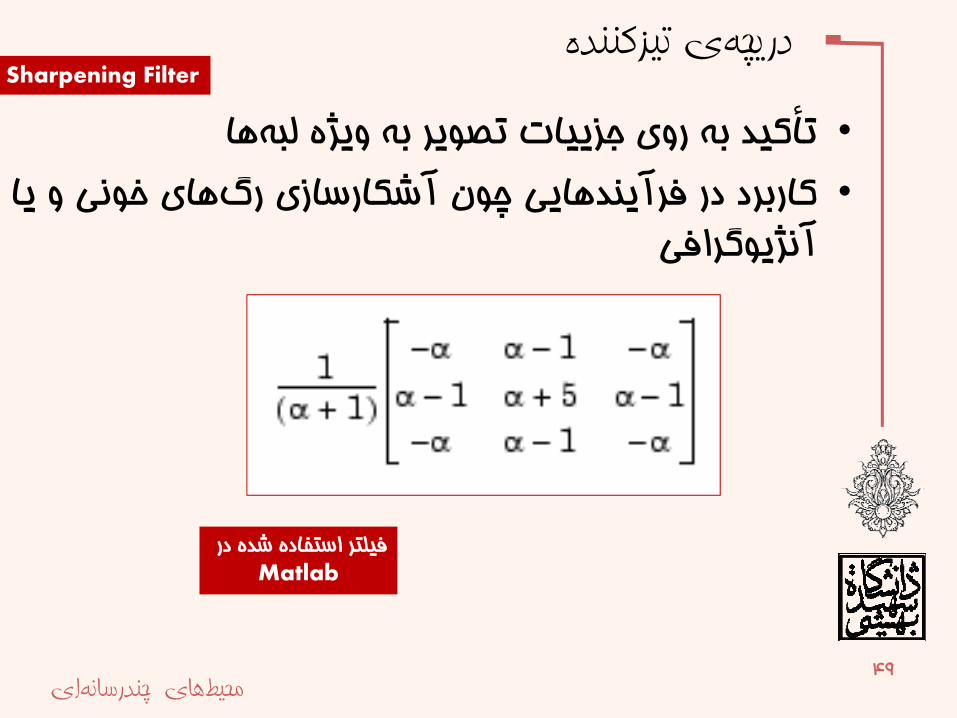
لبه ها ويژه به تصوير جزييات روي به تأكيد•يا و خوني رگ ها ي آشكار سازي چون فرآيند هايي در كاربرد•
آنژيوگرافي
دريچه ی تيز کنندهSharpening Filter
استفاده شده در فيلتر Matlab
محيط های چندرسانه ای49
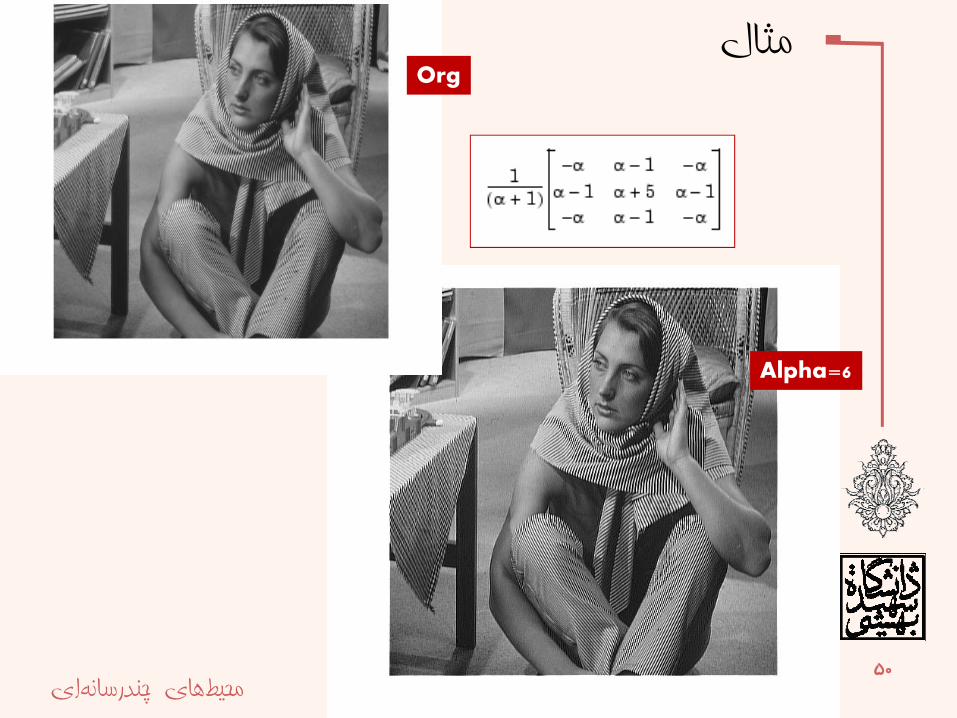
مثالOrg
Alpha=6
محيط های چندرسانه ای50
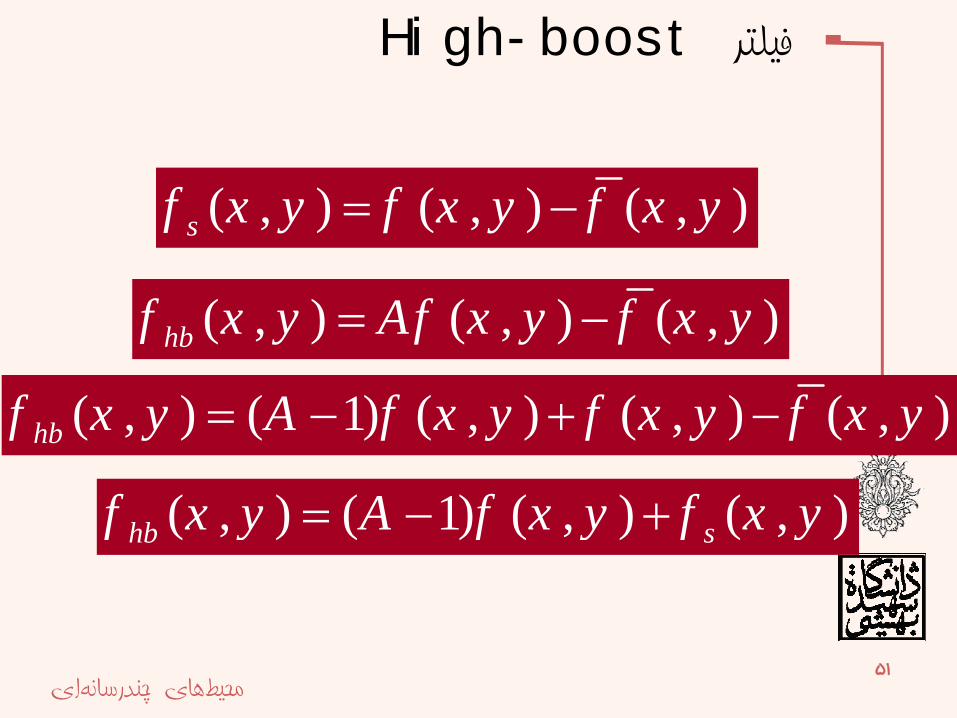
High-boostفيلتر
( , ) ( , ) ( , )sf x y f x y f x y= −
( , ) ( , ) ( , )hbf x y Af x y f x y= −
( , ) ( 1) ( , ) ( , ) ( , )hbf x y A f x y f x y f x y= − + −
( , ) ( 1) ( , ) ( , )hb sf x y A f x y f x y= − +
محيط های چندرسانه ای51
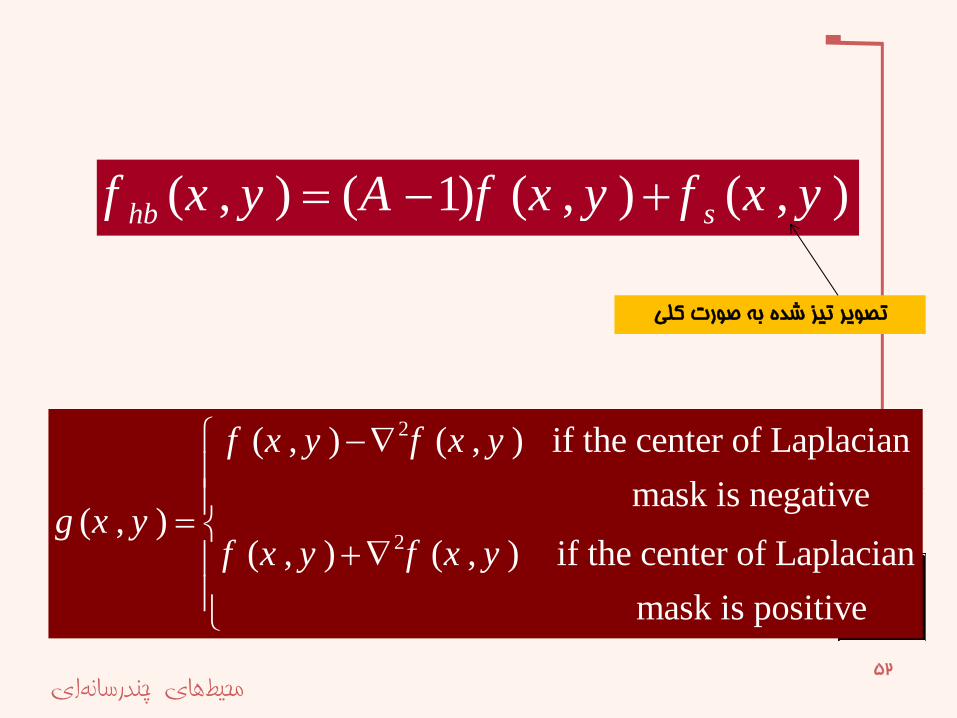
( , ) ( 1) ( , ) ( , )hb sf x y A f x y f x y= − +
تصوير تيز شده به صورت كلي
2
2
( , ) ( , ) if the center of Laplacian mask is negative
( , )( , ) ( , ) if the center of Laplacian
f x y f x y
g x yf x y f x y
−∇
=+∇
mask is positive
⎧⎪⎪⎨⎪⎪⎩
محيط های چندرسانه ای52
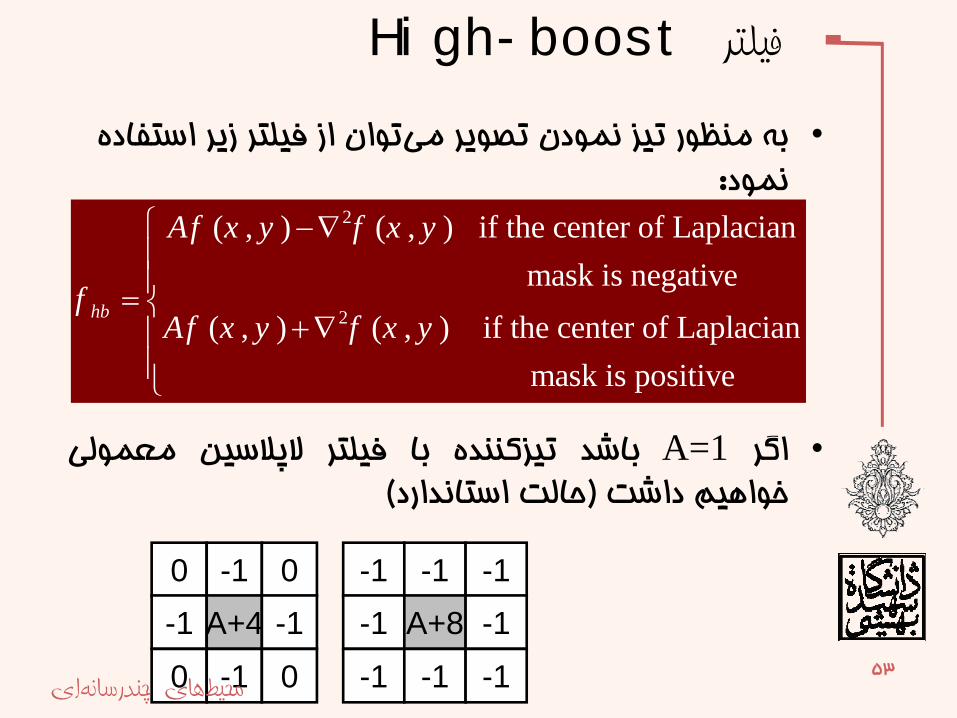
به منظور تيز نمودن تصوير مي توان از فيلتر زير استفاده •:نمود
معمولي الپالسين فيلتر با تيز كننده باشد A=1 اگر•)استاندارد حالت( داشت خواهيم
High-boostفيلتر
2
2
( , ) ( , ) if the center of Laplacian mask is negative
( , ) ( , ) if the center of Laplacian
hb
Af x y f x y
fAf x y f x y
−∇
=+∇
mask is positive
⎧⎪⎪⎨⎪⎪⎩
0 -1 01- A+4 -1
0 1- 0
1- 1- 1-1- A+8 1-
1- -1 محيط های چندرسانه ای-153
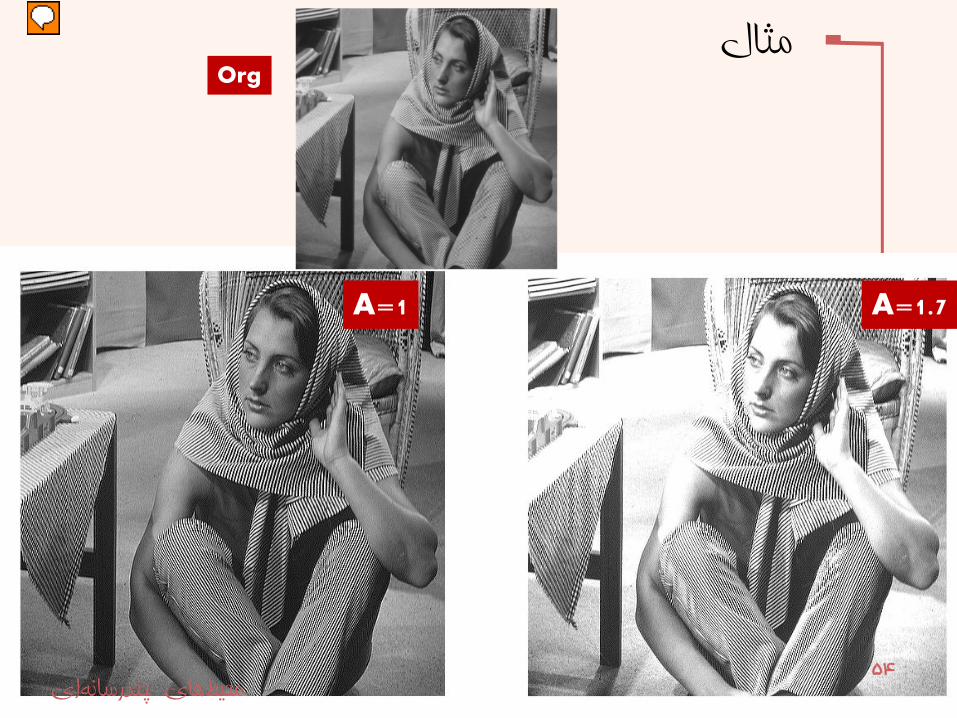
مثالOrg
A=1 A=1.7
محيط های چندرسانه ای54
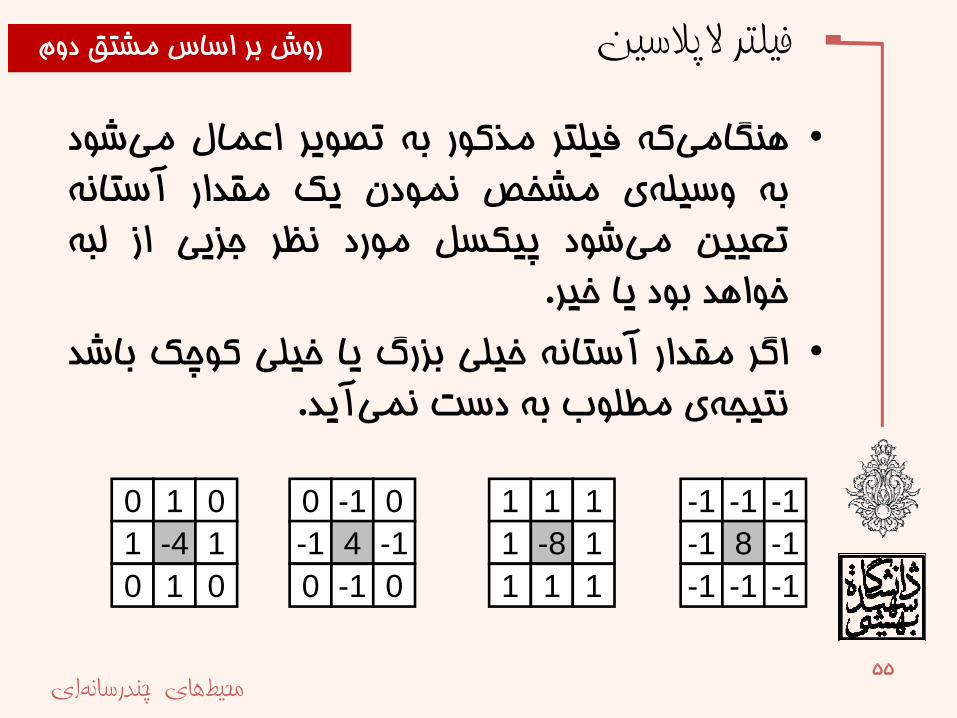
مي شود اعمال تصوير به مذكور فيلتر هنگامي كه• آستانه مقدار يك نمودن مشخص وسيله ي به
لبه از جزيي نظر مورد پيكسل مي شود تعيين.خير يا بود خواهد
باشد كوچك خيلي يا بزرگ خيلي آستانه مقدار اگر•.نمي آيد دست به مطلوب نتيجه ي
فيلتر الپالسين
0 1 01 -4 10 1 0
روش بر اساس مشتق دوم
0 1- 01- 4 1-0 1- 0
1 1 11 -8 11 1 1
1- 1- 1-1- 8 1-1- 1- 1-
محيط های چندرسانه ای55

مثالOrg
Th=0.07 Th=0.14 Th=0.44
محيط های چندرسانه ای56
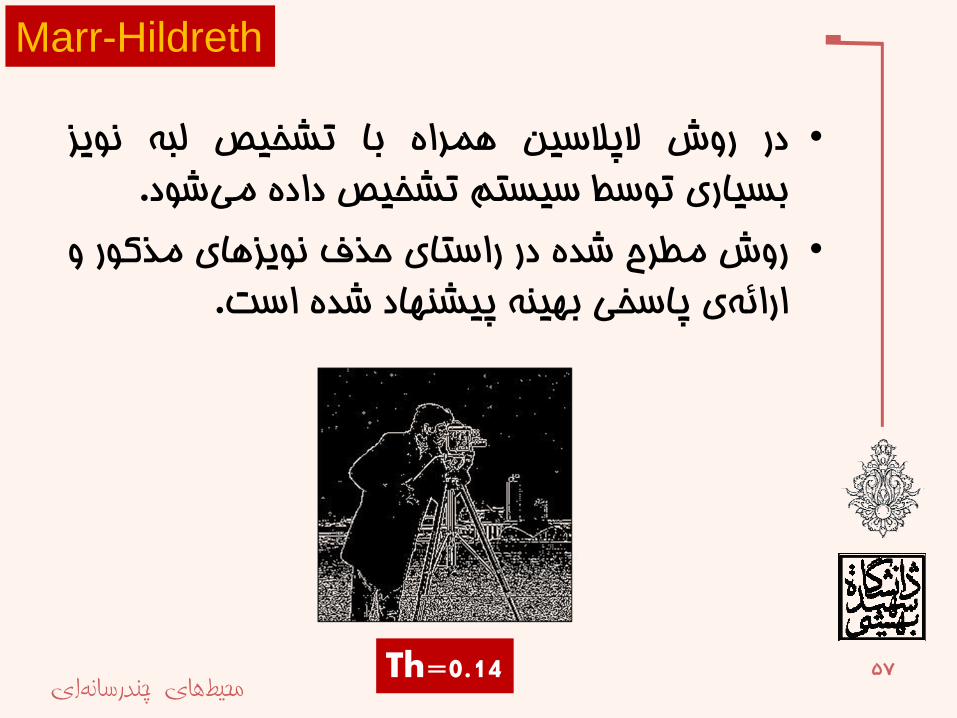
نويز لبه تشخيص با همراه الپالسين روش در•.مي شود داده تشخيص سيستم توسط بسياري
و مذكور نويزهاي حذف راستاي در شده مطرح روش•.است شده پيشنهاد بهينه پاسخي ارائه ي
Th=0.14محيط های چندرسانه ای
57
Marr-Hildreth
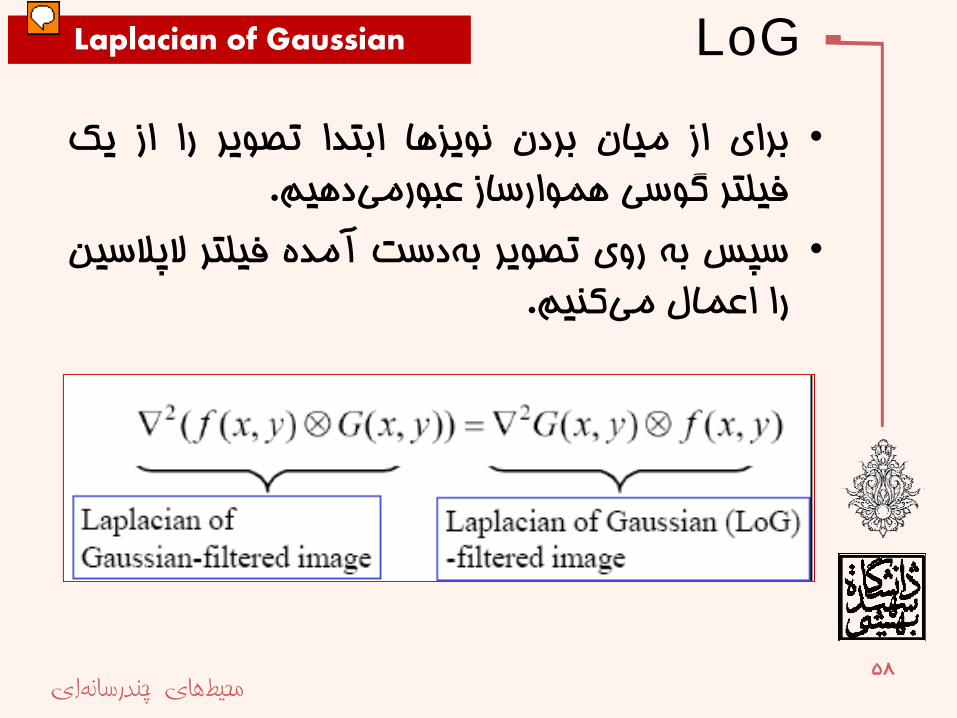
يك از را تصوير ابتدا نويزها بردن ميان از براي•.عبورمي دهيم هموارساز گوسي فيلتر
الپالسين فيلتر آمده به دست تصوير روي به سپس•.مي كنيم اعمال را
LoG
محيط های چندرسانه ای58
Laplacian of Gaussian
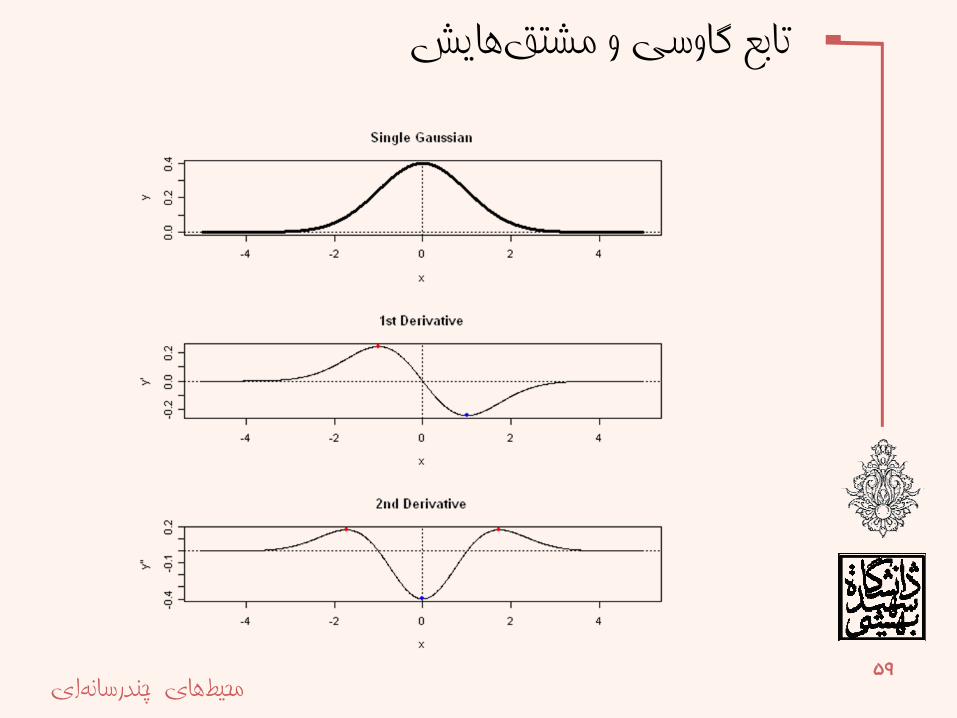
تابع گاوسی و مشتق هايش
محيط های چندرسانه ای59
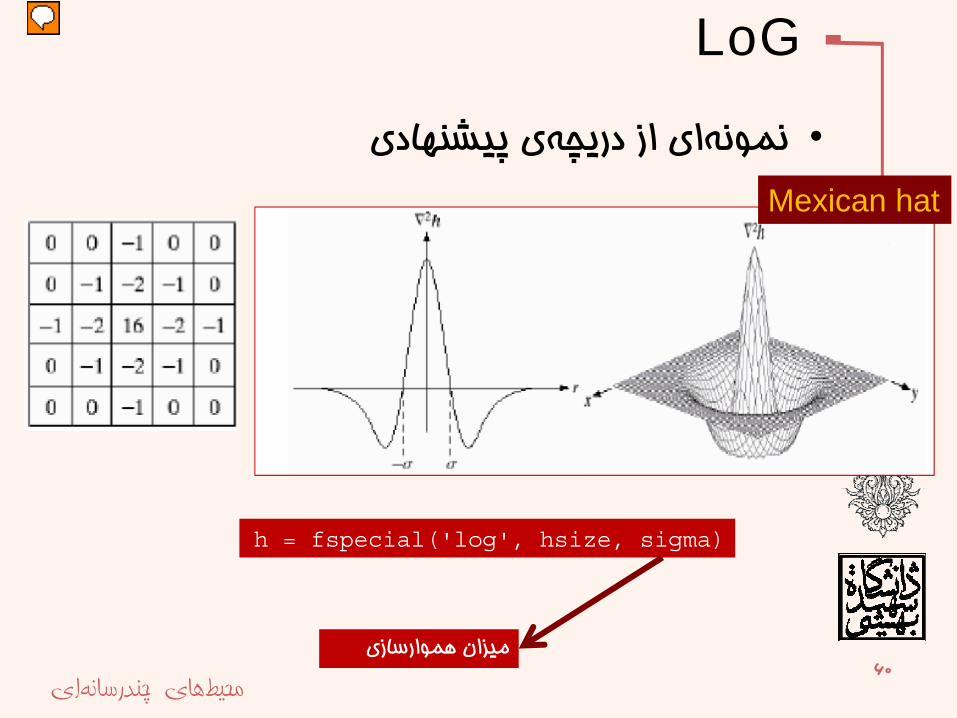
LoG
نمونه اي از دريچه ي پيشنهادي•
محيط های چندرسانه ای60
h = fspecial('log', hsize, sigma)
ميزان هموار سازي
Mexican hat
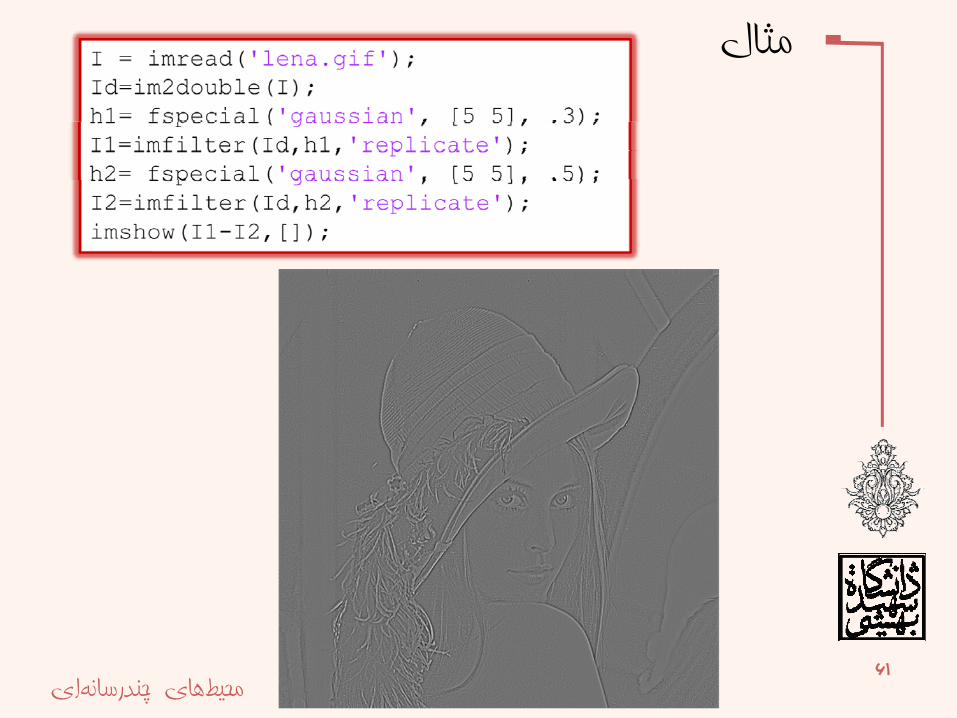
مثال
محيط های چندرسانه ای61
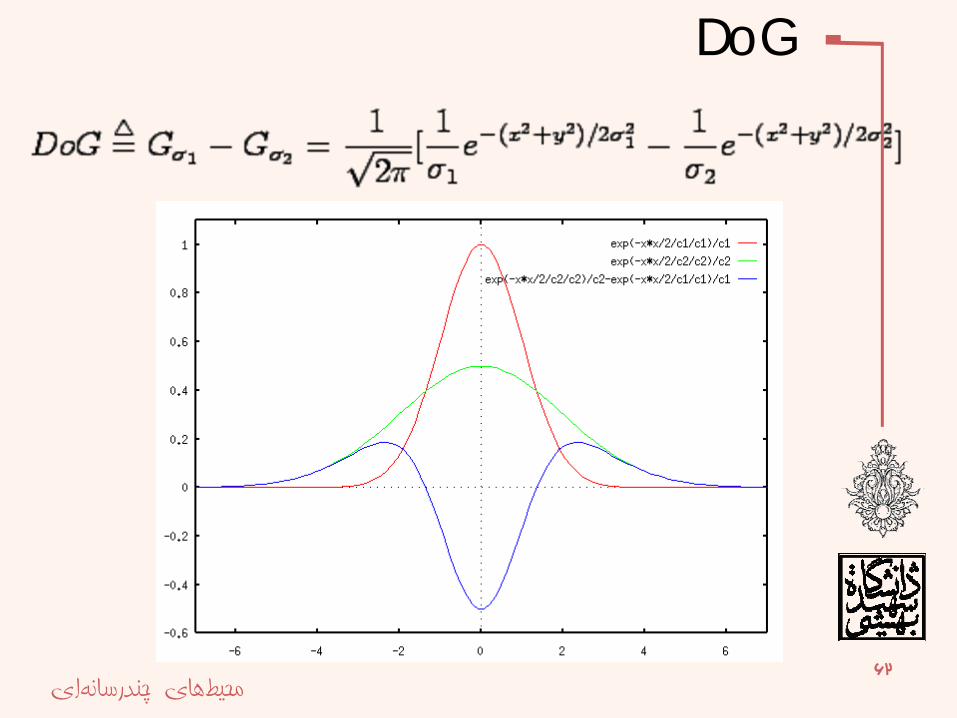
DoG
محيط های چندرسانه ای62
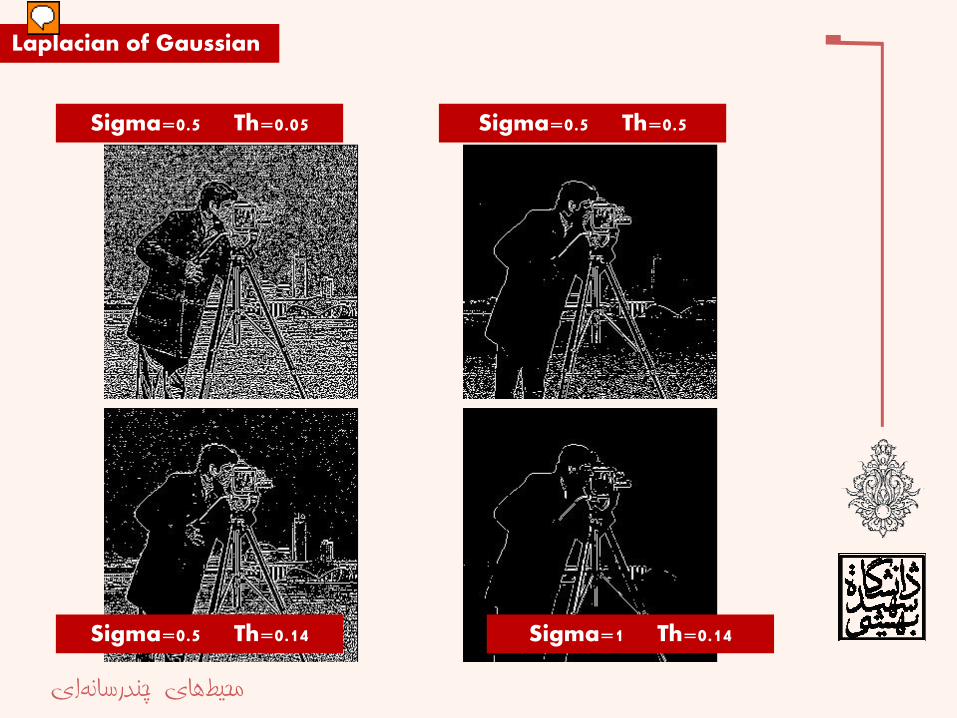
Laplacian of Gaussian
Sigma=0.5 Th=0.05 Sigma=0.5 Th=0.5
Sigma=0.5 Th=0.14 Sigma=1 Th=0.14
محيط های چندرسانه ای
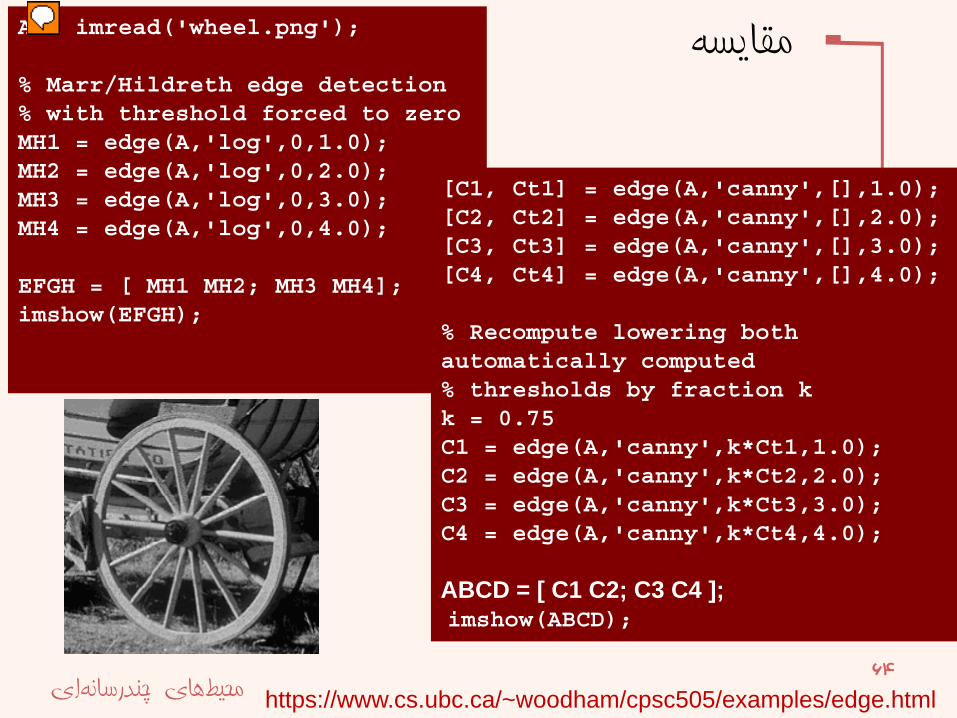
;A = imread('wheel.png')مقايسه % Marr/Hildreth edge detection% with threshold forced to zeroMH1 = edge(A,'log',0,1.0);MH2 = edge(A,'log',0,2.0);MH3 = edge(A,'log',0,3.0);MH4 = edge(A,'log',0,4.0);
EFGH = [ MH1 MH2; MH3 MH4];imshow(EFGH);
[C1, Ct1] = edge(A,'canny',[],1.0);[C2, Ct2] = edge(A,'canny',[],2.0);[C3, Ct3] = edge(A,'canny',[],3.0);[C4, Ct4] = edge(A,'canny',[],4.0); % Recompute lowering both automatically computed% thresholds by fraction kk = 0.75C1 = edge(A,'canny',k*Ct1,1.0);C2 = edge(A,'canny',k*Ct2,2.0);C3 = edge(A,'canny',k*Ct3,3.0);C4 = edge(A,'canny',k*Ct4,4.0); ABCD = [ C1 C2; C3 C4 ]; imshow(ABCD);
محيط های چندرسانه ای64
https://www.cs.ubc.ca/~woodham/cpsc505/examples/edge.html
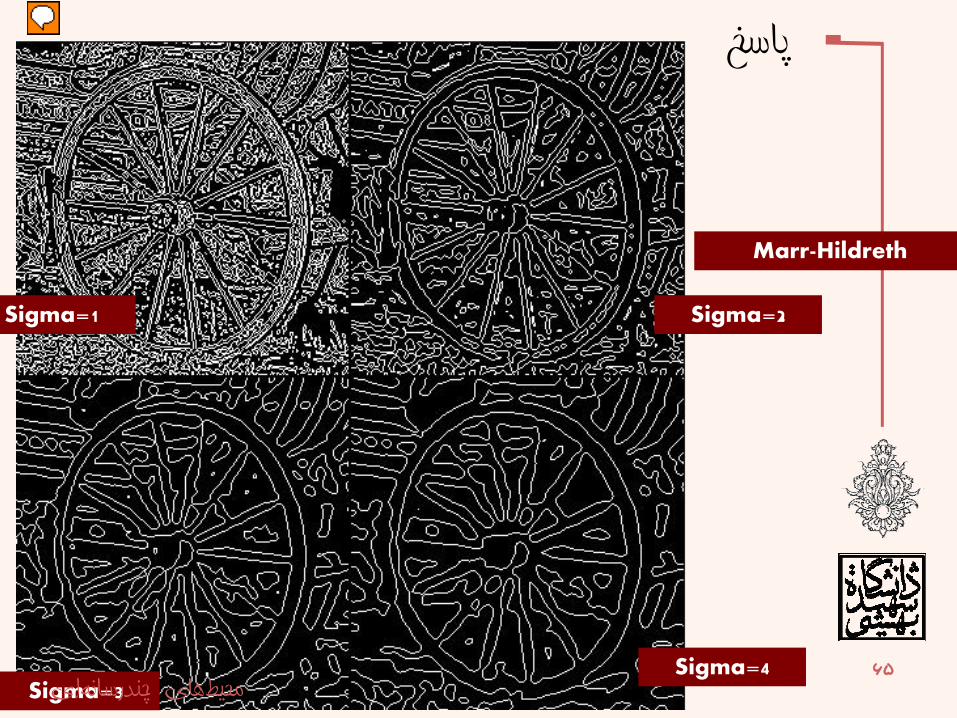
پاسخ
Marr-Hildreth
Sigma=4Sigma=3
Sigma=2Sigma=1
محيط های چندرسانه ای65
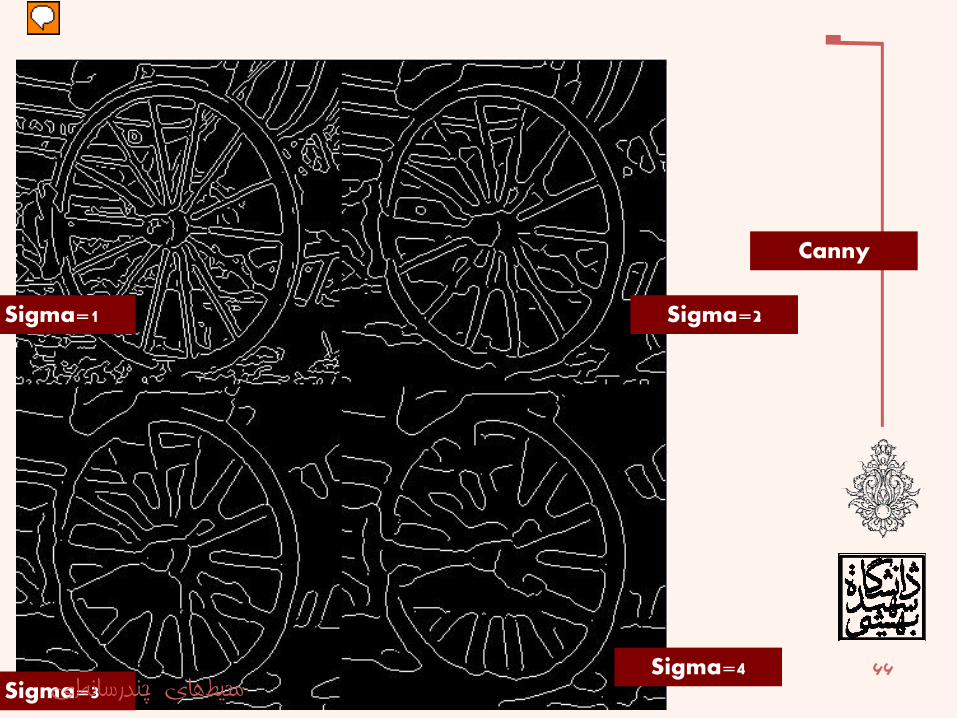
Canny
Sigma=4Sigma=3
Sigma=2Sigma=1
محيط های چندرسانه ای66
LoGمعايب
.نيستند دقيق لبه ها محل•.نيستند مو جود لبه ها جهت اطالعات• داده تشخيص بسته منحني هاي صورت به لبه ها•
.مي شوند
محيط های چندرسانه ای67
Plate of spaghetti effects





























