Embed Size (px)
Citation preview

Controle de Sistemas Mecânicos
Projeto do controlador de nívelProjeto do controlador de nível
Modelagem do DistúrbioDistúrbio em Malha Fechada

Controle de Sistemas Mecânicos
DistúrbioDistúrbio
Exemplos:Vazamentos em sistemas de tanquesVariação da vazão devido a fatores externosOscilações da rede elétricaEtc...
O sinal de distúrbio é uma entrada indesejada
O sinal de distúrbio é considerado de origem externa e desconhecido
O efeito do distúrbio é corrigido através do sinal de controle gerado

Controle de Sistemas Mecânicos
Modelo do tanque sem distúrbio Modelo do tanque sem distúrbio
Considerando o problema do tanque
qs
qe
p
u(t)
d(t)
)()()(0 tqKth
dttdh
e=+τ
0( ) ( )1 e
Kh t q tpτ
=+

Controle de Sistemas Mecânicos
Modelo do distúrbioModelo do distúrbio
Seja uma variação de vazão qv na válvula de entrada (distúrbio)
Pode escrever que a vazão de entrada qe
onde
)()( tdtqv =
)()()( tdtutqe +=
distúrbio ao associado todeslocamen válvulada abertura a regula que posição
==du

Controle de Sistemas Mecânicos
Resposta do sistema com distúrbioResposta do sistema com distúrbio
Considerando o modelo do distúrbio e o modelo do controle de nível como
Pode escrever que a resposta do sistema será
)()()( tdtutqe += 0( ) ( )1 e
Kh t q tpτ
=+
))()((1
)( 0 tdtupKth ++
=τ h(t)
)(sP
d(t)
u(t)
P

Controle de Sistemas Mecânicos
Resposta do sistema com distúrbioResposta do sistema com distúrbio
Assumindo a vazão de entrada como sendo
A resposta do sistema pode ser escrita como
)(1
)(1
)( 00 tdpKtu
pKth
++
+=
τβ
τα
)()()( tdPtuPth du +=
uP dP)(ty
Gu)(tr
Gd)(td
)(th
)(td
)(tuuP
dP
)()()( tdtutqe βα +=

Controle de Sistemas Mecânicos
Distúrbio e Controlador em MFDistúrbio e Controlador em MF
)(sK
-
y(t)+r(t) )(sP
d(t)
u(t)
Há dois sinais de entrada na planta: o de controle u(t) e o de distúrbio d(t)
O sinal de distúrbio é considerado de origem externa e desconhecido
O efeito do distúrbio é corrigido através do sinal de controle gerado

Controle de Sistemas Mecânicos
Resposta y(t) do sistema em MFResposta y(t) do sistema em MF
d(t)=0 r(t)=0
)(sK
-
yr(t)+r(t))(sP
u(t))(sK
-
yd(t))(sP
d(t)
u(t)
yd(t))(sP
d(t)
u(t))(sK
)(sTdy(t)
r(t))(sTr
d(t)
yr(t)
yd(t) dTrTy dr +=

Controle de Sistemas Mecânicos
Exemplo com distúrbioExemplo com distúrbio
)(sK
-
y(t)+r(t) )(sP
d(t)
u(t)
Adotando um controlador proporcional Kp para o sistema abaixo encontrar as funções de transferência de malha fechada em relação a referência e em relação ao distúrbio, as constantes de tempo e ganhos estáticos, e as respostas paraKp= 2 e 10
34
0 ==Kτ
)()()(0 tuKty
dttdy
=+τ

Controle de Sistemas Mecânicos
Solução: TSolução: Trr
-Kp
)(ty)(trPu
)(te )(tu P
A resposta é a soma das respostas
Considerando o distúrbio nulo, encontra-se a resposta de malha fechada em relação à referência
dTrTy dr +=
ryTr =
P
Pr
PP
P
PKPK
ryT
rPKyyPKyrPKy
+==
=+−=
1
)(

Controle de Sistemas Mecânicos
Solução: Solução: TTdd
Considerando agora a referência nula encontra-se a resposta de malha fechada em relação ao distúrbio
dyTd =
)(sK-
yd(t))(sP
d(t)
u(t)
PK P
yd(t))(sP
d(t)
u(t))(sKPK
P
Pd PK
PdyT
+==
1

Controle de Sistemas Mecânicos
Solução: Resposta completaSolução: Resposta completa
O sistema de malha fechada resulta
)(sTdy(t)
r(t))(sTr
d(t)
yr(t)
yd(t)P
Pr PK
PKryT
+==
1
Pd PK
PdyT
+==
1dTrTy dr +=

Controle de Sistemas Mecânicos
Solução: Solução: ττ TrTr e Ke K0 Tr 0 Tr
Obtendo a constante de tempo e ganho estático da FT de malha fechada em relação à referência
P
PT KK
KKKr
0
00 1+
=
PT KKr
01+=
ττ11
1
0
0
0
++
+=
sKK
KKKK
T
P
P
P
r τ
)()()(0 tuKty
dttdy
=+τP
Pr PK
PKryT
+==
1

Controle de Sistemas Mecânicos
Solução: Solução: ττTdTd e Ke K0 0 TdTd
Os parâmetros em relação ao distúrbio são
)()()(0 tuKty
dttdy
=+τ
11
1
0
0
0
++
+=
sKK
KKK
T
P
Pd τ
PT KK
KKd
0
00 1+
=
PTT KKrd
01+==
τττ
P
d
KsKsK
T
11
10
0
++
+=
τ
τ
Pd PK
PdyT
+==
1

Controle de Sistemas Mecânicos
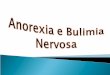
Solução: Solução: MatLabMatLab
0 5 10 15 200
0.5
1
1.5
2
2.5
3
Tempo
Sai
da
Res pos ta do dis turbio e referencia
Yd Kp=2
Yr Kp=2
Yd Kp=10
Yr Kp=10
Malha abertaRes p ReferênciaRes p Dis túrbio
Observar a diminuição na resposta ao
distúrbio

Controle de Sistemas Mecânicos
Solução:Solução: MatlabMatlab
clear all, close all, clctau=4K0=3Gama0=1;t=0:0.1:20;% Resposta de malha aberta ao degrau de distúrbioyd=K0*Gama0*(1-exp(-t/tau));figure(1), plot(t,yd,'b'), hold on

Controle de Sistemas Mecânicos
Solução:Solução: MatlabMatlab
KP=10;K0Tr=(K0*KP)/(1+K0*KP)tauTr=tau/(1+K0*KP)yTr=K0Tr*Gama0*(1-exp(-t/tauTr));plot(t,yTr,'r')K0Td=K0/(1+K0*KP)tauTd=tauTryTd=K0Td*Gama0*(1-exp(-t/tauTd));plot(t,yTd,'k')%legend('Malha aberta','Resp referencia','Malha
fechada')title('Resposta do distúrbio e referencia')xlabel('Tempo'), ylabel('Saida')text(7,0.48,'Yd Kp=2'),text(7,0.9,'Yr Kp=2')text(12,0.16,'Yd Kp=10'),text(12,1.01,'Yr Kp=10')hold off
% Resposta ao degrau do disturbio de malha fechada
KP=2;K0Tr=(K0*KP)/(1+K0*KP)tauTr=tau/(1+K0*KP)yTr=K0Tr*Gama0*(1-exp(-t/tauTr));plot(t,yTr,'r')K0Td=K0/(1+K0*KP)tauTd=tauTryTd=K0Td*Gama0*(1-exp(-t/tauTd));plot(t,yTd,'k')legend('Malha aberta','Resp
Referência','Resp Distúrbio')title('Resposta do disturbio e referencia')xlabel('Tempo'), ylabel('Saida')

Controle de Sistemas Mecânicos
Exemplo erro estacionário com distúrbioExemplo erro estacionário com distúrbio
)(sK
-
y(t)+r(t) )(sP
d(t)
u(t))(te
Considere o exemplo anterior. Obtenha o sinal de erro E(s) quando tanto a entrada de referência R(s) como o distúrbio de entrada D(s) estão presentes. Determine o erro estacionário quando o sistema for submetido a uma entrada de referência na forma de degrau unitário e a um distúrbio de entrada na forma de degrau de valor d0
201.3
4
0
0
===
=
pKdKτ
)()()(0 tuKty
dttdy
=+τ

Controle de Sistemas Mecânicos
Solução:Solução:
)()()( sYsRsE −=
)()()()()( sRsTsDsTsY rd +=
)(1
)()(1
)()( sRPKKsPsD
PKsPsY
P
P
P ++
+=
( ))()(1
)()( sRKsDPKsPsY P
P
++
=
( ))()(1
)(0
0 sRKsDKKs
KsY PP
+++
=τ

Controle de Sistemas Mecânicos
Solução:Solução:
)()()( sYsRsE −=
( ))()(1
)()(0
0 sRKsDKKs
KsRsE PP
+++
−=τ
( ) ( )P
PP
KKssRKsDKsRKKssE
0
00
1)()()(1)(
+++−++
=τ
τ
( )PKKssDKsRssE
0
0
1)()(1)(
++−+
=τ
τ

Controle de Sistemas Mecânicos
Solução:Solução:
( ))()(lim0
sYsRsesest −=→
( ) ( )P
sP
sest KKsdKs
KKssdK
ss
se0
00
00
00
0 11lim
1
11lim
++−+
=++
−+=
→→ ττ
τ
τ
ssR 1)( =
sdsD 0)( =
Pest KK
dKe0
00
11+−
=

Controle de Sistemas Mecânicos
Exercício: Modelagem do distúrbioExercício: Modelagem do distúrbio
-Kp
)(ty)(trPu
)(te )(tu
Pd)(td
Para a planta abaixo encontrar as funções de transferência de malha fechada e a resposta para Kp=1, 2 e 10
34
0 ==
uKuτ
14
0 ==
dKdτ
)()()(0 tuKty
dttdy
uu =+τ )()()(0 tdKty
dttdy
dd =+τ

Controle de Sistemas Mecânicos
SoluçãoSolução
-Kp
)(ty)(trPu
)(te )(tu
A resposta é a soma das respostas
Considerando o distúrbio nulo, encontra-se a resposta de malha fechada em relação à referência
dTrTy dr +=
ryTr =
pu
pur
pupu
pu
KPKP
ryT
rKPyyKP
yrKPy
+==
=+
−=
1
)(

Controle de Sistemas Mecânicos
ContinuandoContinuando
-C
)(tyPu
)(te )(tu
Pd)(td
Considerando agora a referência nula encontra-se a resposta de malha fechada em relação ao distúrbio
dyTd =
pu
dd
dpu
pud
KPP
dyT
dPyyKP
yKPdPy
+==
=+
−+=
1
)(
-C
)(ty
Pu
Pd)(td

Controle de Sistemas Mecânicos
ContinuandoContinuando
O sistema de malha fechada resulta
)(tyGu
)(tr
Gd)(td
pu
pur KP
KPryT
+==
1
pu
dd KP
PdyT
+==
1dTrTy dr +=

Controle de Sistemas Mecânicos
AindaAinda
Encontrando a FTO de malha fechada em relação à referência (mesma anterior)
pu
pur KP
KPryT
+==
1)()()(
0 tuKtydttdy
uu =+τ
pu
puT KK
KKK
r0
00 1+
=
11
1
0
0
0
++
+=
pKK
KKKK
T
pu
u
pu
pu
r τpu
uT KKr
01+=
ττ

Controle de Sistemas Mecânicos
Para o distúrbioPara o distúrbio
A FTO de malha fechada em relação ao distúrbio
)()()(0 tuKty
dttdy
uu =+τ )()()(0 tdKty
dttdy
dd =+τ
pu
u
d
d
d
KpKpK
T
11
10
0
++
+=
τ
τpu
dd KP
PdyT
+==
1

Controle de Sistemas Mecânicos
FinalmenteFinalmente
du ττ =
Os parâmetros em relação ao distúrbio são
pu
u
d
d
d
KpKpK
T
11
10
0
++
+=
τ
τ)()()(
0 tuKtydttdy
uu =+τ )()()(0 tdKty
dttdy
dd =+τ
pu
dT KK
KKd
0
00 1+
=
11
111
0
0
0
++
+
++
=p
KK
KK
Kpp
T
pu
u
pu
dd
u
d τ
ττ
pu
uTT KKrd
01+==
τττ

Controle de Sistemas Mecânicos
Solução parcialSolução parcial
Para realimentação negativa unitária
Observar a diminuição na resposta ao distúrbio

Controle de Sistemas Mecânicos
Solução:Solução: MatlabMatlab
clear all, close all, clctauu=4K0u=3taud=tauu;K0d=1Gama0=1;t=0:0.1:20;
% Resposta de malha aberta ao degrau de disturbio
yd=K0d*Gama0*(1-exp(-t/taud));figure(1), plot(t,yd,'b'), hold on

Controle de Sistemas Mecânicos
Solução:Solução: MatlabMatlab
Kp=10;K0fr=(K0u*Kp)/(1+K0u*Kp)taufr=tauu/(1+K0u*Kp)yfr=K0fr*Gama0*(1-exp(-t/taufr));plot(t,yfr,'r')K0fd=K0d/(1+K0u*Kp)taufd=taufryfd=K0fd*Gama0*(1-exp(-t/taufd));plot(t,yfd,'k')%legend('Malha aberta','Resp
referencia','Malha fechada')title('Resposta do disturbio e referencia')xlabel('Tempo'), ylabel('Saida')text(12,0.3,'Kp=1'),text(12,0.8,'Kp=1')hold off
% Resposta ao degrau dodisturbio de malha fechada
Kp=1;K0fr=(K0u*Kp)/(1+K0u*Kp)taufr=tauu/(1+K0u*Kp)yfr=K0fr*Gama0*(1-exp(-t/taufr));plot(t,yfr,'r')K0fd=K0d/(1+K0u*Kp)taufd=taufryfd=K0fd*Gama0*(1-exp(-t/taufd));plot(t,yfd,'k')legend('Malha aberta','Resp
referencia','Malha fechada')title('Resposta do disturbio e
referencia')xlabel('Tempo'), ylabel('Saida')

Controle de Sistemas Mecânicos
ReferênciaReferência
Malha aberta, Distúrbios e Malha fechadaOgata pg 53-56