Embed Size (px)
Citation preview

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 1/40
Apontamentos de aula: Tópicos Básicosde Cartografia e Sistemas dePosicionamento Global (GPS)
Prof. Peterson Ricardo Fiorio
Piracicaba - SPSetembro de 2006

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 2/40
2
Apontamentos de Aula: Tópicos Básicos de Cartografia e oSistema UTM.
1 CARTOGRAFIA
O vocábulo CARTOGRAFIA, etimologicamente “descrição de cartas” foiintroduzido em 1839 pelo segundo Visconde de Satarém.
Concepção:- Traçado de mapas,- A arte do traçado de mapas,
- A ciência, a arte e a técnica de representar a superfície terrestre.
Em 1949 à Organização das Nações Unidas: Cartografia no sentido lato dapalavra não é apenas uma das ferramentas básicas do desenvolvimentoeconômico, mas é a primeira ferramenta a ser usada antes que outrasferramentas possam ser possam em trabalho.
1.1 Forma e dimensões da terra
“A superfície da terra é muito complexa para admitir um modelo geométricoou físico perfeito. Utilizam-se aproximações mais ou menos adequadas esimplificadas, em função das rugosidades em termos de precisão e deformaçõesaceitáveis”.
Existem três superfícies de referência (Figura 1): Pitágoras em 528 AC: introduziu o conceito da forma “esférica”
Carl Friedrich Gauss (1777 – 1855): a forma do planeta é o “Geóide.” “Essasuperfície se deve pela atração da gravidade e pela força centrífuga darotação da Terra”.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 3/40
3
Elipsóide – é uma elipse que ao girar sobre seu eixo menor forma umvolume (Elipsóide de Revolução) “achatado nos pólos”. Esse modelomatemático é mais simples na representação da Terra.
n i v
H
P
N
Q
Superfície Física
Geóide
Elipsóide
Figura 1. Superfícies de referência Física, Geóide e Elipsóide.
Superfície física (SF): limitada pelo relevo topográfico, para algumasaplicações pode ser considerada esférica.
Superfície elipsoidal: limitada por uma elipsóide de revolução (figura
matemática formada pela revolução de uma elipse em torno do eixo menor).Superfície geoidal: limitada a uma forma geométrica denominada geóide,
que considera que a superfície dos oceanos está em repouso, sem variação depressão atmosférica, sem atração de outros corpos celestes (sol e lua = semmarés) e supostamente adentrando aos continentes.
Ainda segundo a figura 1 podemos notar:a) Linha de força vertical (v - ângulo reto ao geóide) está relacionada ao campode gravidade real da Terra.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 4/40
4
b) Linha de força normal (n - ângulo reto ao elipsóide) está relacionada ao campode gravidade normal da Terra.c) O ângulo que a linha vertical (v) faz com a normal (n) é denominado ângulo dedesvio da vertical (i).
Normalmente considerando-se os componentes deste ângulo (i) segundodois planos perpendiculares, a componente mediana (E) (plano direção norte-sul)e componente vertical (N) (plano na direção leste-oeste).d) Altitude ortométrica (H), separação da superfície física e a geoidal formada aolongo da linha vertical (v). Obtida através da operação ou nivelamento associadaa gravimetria.e) Ondulação geoidal (N): separação entre a superfície elipsoidal e a geoidal aolongo da linha normal (n). Seu calculo foi objetivo tradicional da geodésia física ehoje pode ser obtido por satélites artificiais.
1.1.1 Dimensões da Terra
Partindo-se do equador e atravessando o centro da Terra até o outro ladotemos 12.756 km. Partindo-se de um dos pólos e atravessando o centro da Terra

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 5/40
5
até o outro lado temos 12.713 km. A diferença é de 43 km, a terra é achatada nospólos.
1.1.2 Forma
a) Terra ou Geóide
Geóide forma da figura da terra, considerando que a superfície dos mares estáem repouso, sem variação de pressão atmosférica, sem atração de outros corposcelestes (sol e lua = ondas e marés) e supostamente adentrando ao continente.
b) A Terra como uma elipsóide de revolução
Modelo matemático na qual uma elipse é rotacionada em torno do eixomenor. Figura matemática definida como:

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 6/40
6
= a – b / a
Onde:= achatamento;
a = maior semi-eixo;b = menor semi-eixo.
O posicionamento e cartografia se valem sempre de coordenadasgeodésicas ou elipsóidicas, ao invés de cartesianas geográficas, referidas a um
elipsóide de revolução. Os modelos de elipsóides mais utilizados no Brasil são:Córrego Alegre, SAD 69 e WGS 84.
Tabela 1. Modelos de elipsóides mais usados no Brasil.Elipsóide a (m)
Córrego Alegre 6.378,388 1/297SAD-69 6.378,160 1/298,25
WGS-84 6.378,137 1/298,27

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 7/40
7
“O levantamento é realizado no geóide e projetado para o elipsóide com ummodelo pré-estabelecido. Ex SAD 69” .
c) A Terra como uma esfera.
Para muitas aplicações a Terra pode ser considerada como uma esfera.
2 ORIGEM DAS LATITUDES E LONGITUDES
2.1 Estações do ano e a origem das Latitudes
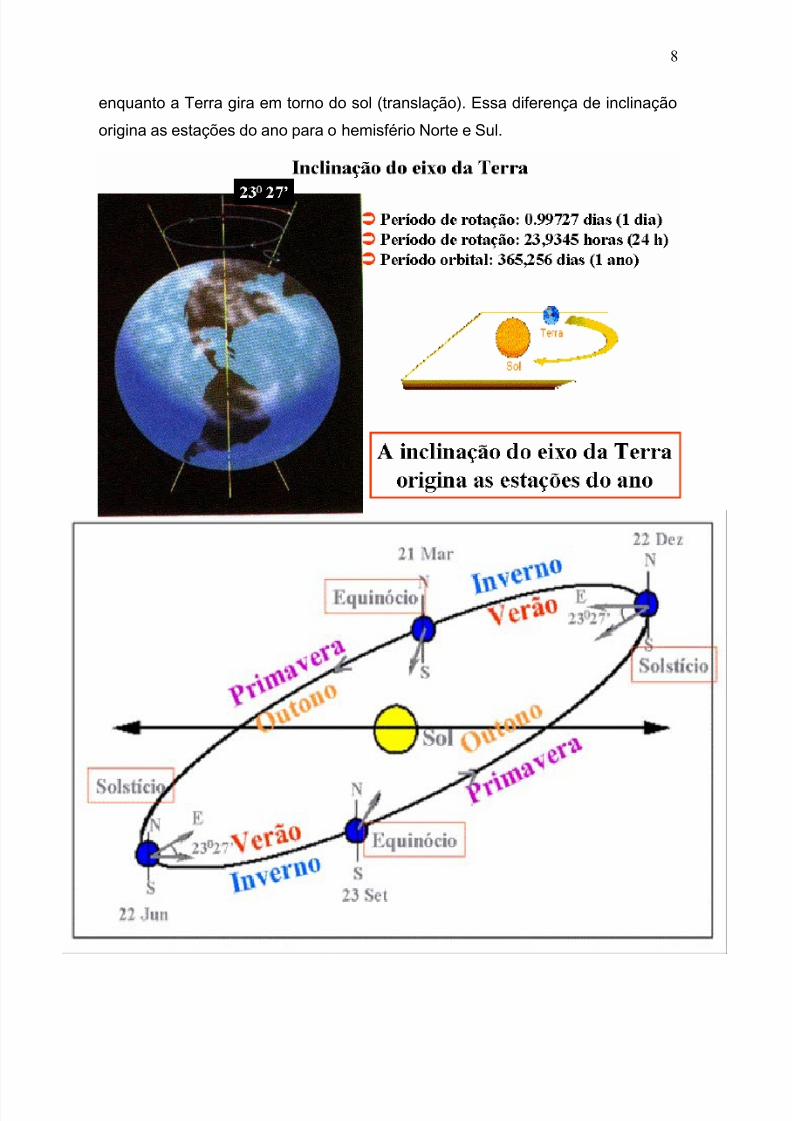
A Terra apresenta dois movimentos principais, rotação e translação.- ROTAÇÃO: ocorre em torno do seu eixo e é responsável pelo ciclo dia e noite.- TRANSLAÇÃO: movimento da Terra na sua órbita elíptica em torno do sol.
As estações do ano são causadas pela inclinação do eixo de rotação da
Terra (230
27’) em relação a perpendicular ao plano definido pela órbita da Terra.Essa inclinação faz com que a orientação da Terra mude continuamente
8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 8/40
8
enquanto a Terra gira em torno do sol (translação). Essa diferença de inclinaçãoorigina as estações do ano para o hemisfério Norte e Sul.
8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 9/40
9
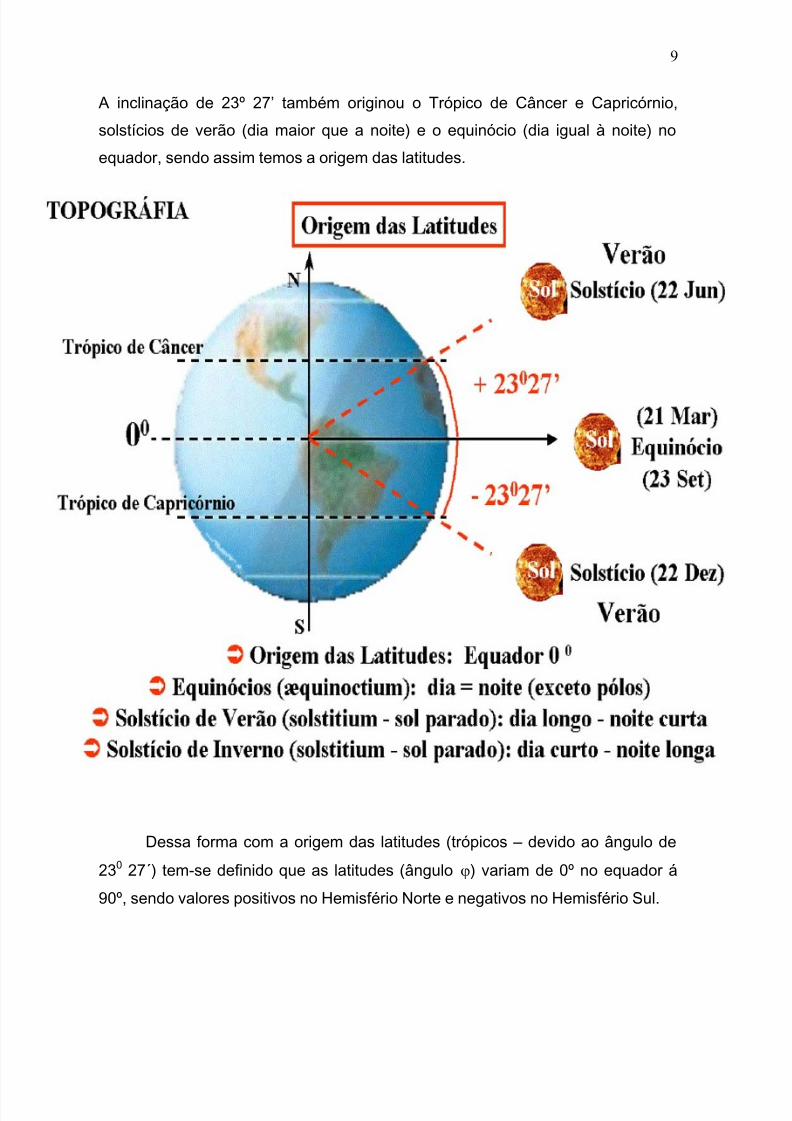
A inclinação de 23º 27’ também originou o Trópico de Câncer e Capricórnio,solstícios de verão (dia maior que a noite) e o equinócio (dia igual à noite) noequador, sendo assim temos a origem das latitudes.
Dessa forma com a origem das latitudes (trópicos – devido ao ângulo de230 27´) tem-se definido que as latitudes (ângulo ϕ ) variam de 0º no equador á90º, sendo valores positivos no Hemisfério Norte e negativos no Hemisfério Sul.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 10/40
10
2.2 Origem das Longitudes
Longitude é o ângulo (∝ ) medido ao longo do equador tendo origem emum meridiano de referencia (Greenwich) e a extremidade. Varia de 0º á 180º asendo positivo a Leste (E) e negativo Oeste (W) de Greenwich.
2.3 Origem dos fusos horários.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 11/40
11
Partindo–se de Greenwich, dando uma volta na terra temos 360º. Arotação da terra leva 24 horas, sendo assim temos:
360º / 24 h = 15º, ou seja, a cada 15º temos 1 hora
Dessa forma os fusos variam de 15º em 15º sendo que:0 a 12h. (E) Leste ( + )0 a 12h. (W) Oeste ( - )

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 12/40
12
3 PROJEÇÕES CARTOGRÁFICAS
Todas as representações de superfícies curvas em um plano envolvem“extensões” ou “contrações” que resultam em “ DISTORÇÕES”.
Uma notável ilustração de distorções e deformações pode ser vista nasfiguras abaixo. Um rosto foi desenhado sobre a projeção globular (primeira daesquerda), sendo depois transportado para as projeções ortográfica,estereográfica e de Mercator respectivamente.
EstereográficaGlobular
OrtográficaMercator
3.1 Classificação das projeções cartográficas
3.1.1 Quanto ao método
– Geométricas: São as que podem ser traçadas diretamente utilizando aspropriedades geométricas da projeção.
– Analíticas: São as que podem ser traçadas com o auxílio de cálculo adicional,tabelas ou ábacos e desenho geométrico próprio.
– Convencionais: São as que só podem ser traçadas com o auxílio de cálculo etabelas.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 13/40
13
3.1.2 Quanto à superfície de projeção
B) C)A)
A) Planas ou Azimutais: quando a superfície for um plano.B) Cilíndricas: quando a superfície for um cilindro.C) Cônicas: quando a superfície for um cone.
3.1.3 Quanto às propriedades
Na impossibilidade de se desenvolver uma superfície esférica ouelipsóidica sobre um plano “sem deformações”, na prática buscam-se projeçõestais que permitam diminuir ou eliminar parte das distorções conforme a aplicaçãodesejada.
Eqüidistantes: não apresenta deformações lineares para algumas linhasem especial “comprimentos representados em escalas uniformes”.
Conformes: não apresenta deformações angulares. Todos os ângulos sãomantidos em pequenas regiões. Um pequeno círculo na superfície terrestrese projetará como um círculo na projeção, caracterizando uma deformaçãoangular nula.
Equivalentes: não alteram as áreas, conservando assim, uma “relação”constante com suas correspondentes superfície da terra. Seja qual for a

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 14/40
14
proporção representada num mapa, ela conserva a mesma relação com aárea de todo o mapa.
Afiláticas: não possui nenhuma das propriedades anteriores (nãoconservam área, distância, forma ou ângulos).
As propriedades acima descritas são básicas e mutuamente exclusivas. Elasressaltam mais uma vez que não existe uma representação ideal, mas apenas amelhor representação para um determinado propósito.
3.1.4 Quanto ao tipo de contato entre as superfícies de projeção ereferência.
-- TT aa nn ggeenn tt eess::
-- SSeeccaa nn tt eess::
Para as superfícies de projeção plana a tangencia determina um únicoponto, para as superfícies cilíndrica e cônica temos uma linha. No caso do contatosecante passamos a ter dois pontos na projeção plana, duas linhas iguais naprojeção cilíndrica e duas linhas desiguais na cônica.
Para levantamentos topográficos, considera-se uma projeção plana, de
Maximo 50 km, para minimizar as distorções provocadas pela curvatura da Terra.
8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 15/40
15
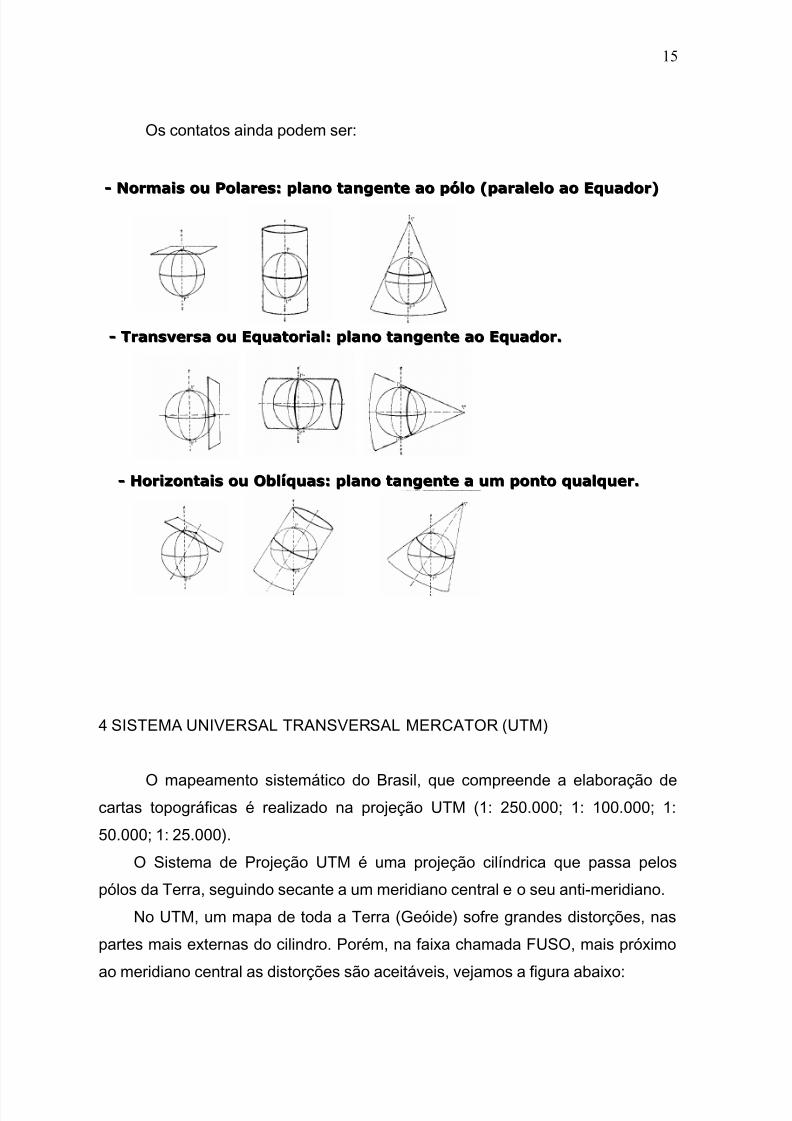
Os contatos ainda podem ser:
--
NN
oo
rr
mm
aa
iiss
oo
uu
PP
oo
llaa
rr
ee
ss
:: pp
llaa
nn
oo
ttaa
nn
gg
ee
nn
ttee
aa
oo
pp
óó
lloo
((
pp
aa
rr
aa
llee
lloo
aa
oo
EE
uu
aa
dd
oo
rr
))
-- TTrr aa nn ss vv ee rr ss aa oo uu EEqq uu aa tt oo rr iiaa ll :: pp llaa nn oo tt aa nn gg ee nn tt ee aa oo EEqq uu aa dd oo rr ..
-- HH oo rr iizz oo nn tt aa iiss oo uu OO bb ll ííqq uu aa ss :: pp llaa nn oo tt aa nn gg ee nn tt ee aa uu mm pp oo nn tt oo qq uu aa llqq uu ee rr ..
4 SISTEMA UNIVERSAL TRANSVERSAL MERCATOR (UTM)
O mapeamento sistemático do Brasil, que compreende a elaboração decartas topográficas é realizado na projeção UTM (1: 250.000; 1: 100.000; 1:50.000; 1: 25.000).
O Sistema de Projeção UTM é uma projeção cilíndrica que passa pelospólos da Terra, seguindo secante a um meridiano central e o seu anti-meridiano.
No UTM, um mapa de toda a Terra (Geóide) sofre grandes distorções, naspartes mais externas do cilindro. Porém, na faixa chamada FUSO, mais próximoao meridiano central as distorções são aceitáveis, vejamos a figura abaixo:

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 16/40
16
Projeção Cilíndrica
Linhas SecantesSecante
Meridiano Central do Fuso
60
FusoProjeção Cilíndrica
Linhas SecantesSecanteSecante
Meridiano Central do Fuso
60
Fuso
É claro que é possível girar um pouco o cilindro, de 60 em 60, para se obter
um outro meridiano central, um novo fuso, para todo o geóide. Sendo à base daprojeção de Gauss, da qual a UTM é uma variação específica.
Sendo assim, por um acordo mundial os fusos UTM apresentam-se com 6ºde largura, enumerados crescentemente (1 à 60) de Oeste (W) para Leste (E)partindo- se do anti-meridiano 180º no Oceano Pacifico.
Na figura abaixo é possível verificar todos os fusos UTM, bem como omeridiano central para cada fuso.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 17/40
17

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 18/40
18
Para ilustrar um fuso UTM na figura abaixo vamos exemplificar o Fuso 22, o
qual se encontra entre as longitudes 54 0 e 480 Oeste de Greenwich cujo meridianocentral é 510 W.
540 510 480
540 510 480
N
W EEquador
Meridiano Central510 W de Greenwich
FUSO - 22
Como já comentado para diminuir as distorções, o cilindro envolvente sofreuma redução, tornando-se secante, de modo que o raio do cilindro fica menor quea esfera.
A secância traz mais vantagens que a tangência porque há duas linhasparalelas ao meridiano central que fornecem distancia em sua verdadeiragrandeza as quais estão situadas a 180 km a Oeste (W) e Leste (E) do meridiano
central. Vamos observar a figura abaixo:

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 19/40
19
6030 30
10 37’ 10 37’
180 Km 180 KmÁrea de ReduçãoÁrea de Ampliação
k = 1 ,
0 0 1
k = 1
k = 1
k = 1 ,
0 0 1
k = 0 ,
9 9 9 6
kk kkk
Superfície do Geóide
Fuso Secante ao Geóide (6 0)
K – Fator de Escala
Fuso Secante ao Geóide (6 0)
Superfície do Geóide
Meridiano Central do Fuso
6030 30
10 37’ 10 37’
180 Km 180 KmÁrea de ReduçãoÁrea de Ampliação
k = 1 ,
0 0 1
k = 1
k = 1
k = 1 ,
0 0 1
k = 0 ,
9 9 9 6
kk kkk
Superfície do Geóide
Fuso Secante ao Geóide (6 0)
K – Fator de Escala
Fuso Secante ao Geóide (6 0)
Superfície do Geóide
Meridiano Central do Fuso
No meridiano central de qualquer fuso, o fator de escala (K) é 0,9996. A
partir do meridiano central o fator de escala, cresce até atingir o valor K = 1 tantopara Oeste (W) como para Leste (L) o que equivale a 1 0 37’ ou 180 km partindo-se do meridiano central do fuso. O fator de escala k é utilizado para planificar acurvatura da terra (superfície do Geóide). Dessa forma, teremos áreas de redução(K < 1) e de ampliação (K > 1).
Para as medidas de coordenadas Norte–Sul (Latitudes), no sistema UTM,no Hemisfério Norte, a linha do equador assume-se o valor 0 km e vai até 10.000km para o Pólo Norte. Para o Hemisfério Sul, a linha do equador assume o valorde 10.000 km e vai até 10.000 km no Pólo Sul. Os valores 10.000 km para oHemisfério Norte e o para e 0 km para o Hemisfério Sul nunca aparecem em umacarta no sistema UTM, pois acima de 88° de latitude Norte ou Sul, utiliza-se umoutro sistema de projeção para os pólos, a projeção estereográfica polar , ondeos erros de distorção são bem menores.
Para as medidas de coordenadas Oeste-Leste (Longitudes), no sistemaUTM, por convenção o meridiano central de cada fuso apresenta o valor de 500
km. No fuso partindo-se do meridiano central o valor diminui à medida que se
UTM, por convenção o meridiano central de cada fuso apresenta o valor de 500
km. No fuso partindo-se do meridiano central o valor diminui à medida que se

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 20/40
20
caminha para Oeste (W) e aumenta quando se caminha para Leste (E). Comorepresenta o esquema abaixo:
Dessa forma, todos os valores de coordenadas são positivos. Combinandoos valores de latitude e longitude, cada ponto da superfície da terra tem seu parde coordenadas, dentro de cada fuso.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 21/40
21
4 Nomenclatura das folhas
.1 Carta milionésima (carta internacional do mundo)
A Carta Internacional do Mundo do Milionésimo é um esquema de
endo que foitilizad
.2 O sistema de códigos “ UTM atual”
O equador divide o mundo em Hemisfério Norte, codificado pela letra N e
ara cima ou para baixo os paralelos (latitudes) são
4
articulações em escala 1: 1.000.000 que forneceu informações sobre a posiçãoda área mapeada, padronizando assim as referencias cartográficas.
É composta por áreas de 6° de longitude por 4° de latitude, su a uma projeção cônica. A divisão em 6° de longitude é a mesma da UTM.
4
Hemisfério Sul, pela letra S.Partindo do equador p
divididos de 4° em 4°, sendo que para cada 4° de latitude para cima ou parabaixo, codifica-se uma letra na ordem alfabética partindo-se do Equador (A, B, C,D, E...), sendo essa precedida pelos códigos dos Hemisférios Norte ou Sul, como
observado na figura abaixo.
Equador ( 00 )
40
120
160
80
40
880
NA
SA
SC
SD
SV
SB
Equador ( 00 )
40
120
160
80
40
880
NA
SA
SC
SD
SV
SB

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 22/40
22
Partindo se do antimeridiano de Greenwich, (180°) temos a nomenclaturados fusos que vai de 1 a 60, sendo que os mesmos são divididos de 6° em 6°.
Assim sendo, para cada carta ao milionésimo temos uma nomenclaturaespecifica.
Ex: SD 22
S - Hemisfério Sul,
D – Letra D, entre as Latitudes de 12° e 16° S.
22 - Fuso 22 (Meridiano Central a 510 W de Greenwich, com longitudes 540 e 480 ).
As cartas ao milionésimo (1: 1.000.000), são então divididas, comomostra o esquema abaixo:
D 40
60
V X
Y Z20
SD 22ESC: 1: 1.000.000D 40
60
V X
Y Z20
SD 22ESC: 1: 1.000.000
20
3 0
A B
Y
D1 0
SD 22 - YESC: 1: 500.000
C
20
3 0
A B
Y
D SD 22-Y- C
ESC: 1:250.0001 0
SD 22 - YESC: 1:
C SD 22-Y- C
ESC: 1:250.000

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 23/40
23
30´
10
30´
SD-22 - Y - C ESC: 1: 250.000
SD 22 - Y - C - IV ESC: 1:100.000
1 0 30´
CI II III
IV V VI
30´
10
30´
SD-22 - Y - C ESC: 1: 250.000
SD 22 - Y - C - IV ESC: 1:100.000
1 0 30´
C
I II III
IV V
IV1
3
2
4
30´
30´
15´
SD 22-Y-C-IVESC: 1:100.000
SD 22-Y-C-IV-4ESC: 1:50.000
IV1
3
2
4
30´
30´
15´
SD 22-Y-C-IVESC: 1:100.000
SD 22-Y-C-IV-4ESC: 1:50.000

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 24/40
24
7´30”
4 NO
SO
NE
SE
15´
15´
7´30”
SD 22-Y-C-IV-4ESC: 1:50.000
SD 22-Y-C-IV-4-SEESC: 1:25.000
7´30”
4 NO
SO
NE
SE
15´
15´
7´30”
SD 22-Y-C-IV-4ESC: 1:50.000
SD 22-Y-C-IV-4-SEESC: 1:25.000
SEA B C
D E F
7´30”
7´30”
SD 22-Y-C-IV-4-SEESC: 1:25.000
3´45”
3´45” SD 22-Y-C-IV-4-SE-FESC: 1:10.000
SEA B C
D E F
7´30”
7´30”
SD 22-Y-C-IV-4-SEESC: 1:25.000
3´45”
3´45” SD 22-Y-C-IV-4-SE-FESC: 1:10.000
Sistema atual
• Folha 1:1.000.000 (4°/6°) / 4 folhas 1:500.000 (V, X, Y, Z)
• Folha 1:500.000 (2°/3°) / 4 folhas 1:250.000 ( A, B, C, D)
• Folha 1:250.000 (1°/1°30’) / 6 folhas 1:100.000 ( I, II, III, IV, V, VI)
• Folha 1:100.000 (30’/30’) / 4 folhas 1:50.000 (1, 2, 3, 4)
• Folha 1:50.000 (15’/15’) / 4 folhas 1:25.000 (NO, NE, SO, SE)
• Folha 1:25.000 (7’30”/7’30”) / 6 folhas 1:10.000 (A, B, C, D, E, F).

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 25/40
25
Para o Brasil temos então o início no fuso a 780 W de Greenwich
com o fuso 18 caminhando para Leste até o fuso 25, com 30 0 deLongitude. Nas Latitudes temos da nomenclatura NB a SI no sentido Norte
– Sul.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 26/40
26
Apontamentos de Aula: Sistema de PosicionamentoGlobal. Conceitos e Princípios Básicos.
1 INTRODUÇÃO
Com o advento da era espacial, marcado pelo lançamento do satéliteSputnik pelos Russos (1957) e logo após com o lançamento do satélite Vanguardpelos Americanos (1958) teve inicio a utilização dos satélites para posicionamentogeodésico. Assim como a I e II Grande Guerra foram as grandes responsáveis nodesenvolvimento do sensoriamento remoto, a Guerra Fria financiou o inicio do
desenvolvimento do Sistema de Posicionamento Global (GPS) em 1973.O GPS foi desenvolvido pelo Departamento de Defesa dos Estados
Unidos da América, originalmente para fins militares, liberado com restrições parauso civil em 1977, e desde então vem sendo aprimorado, principalmente ao quediz respeito aos aparelhos eletrônicos e programas computacionais.
O sistema GPS foi projetado para se obter o posicionamentoinstantâneo bem como a velocidade de um ponto na superfície da terra ou
próximo a ela.Representa atualmente uma nova ferramenta para cartografia e ciência
afins, tendo o uso do GPS crescido significativamente nas atividades agrícolas. OBrasil é um país de extensão territorial e carente em informação georeferenciada,sendo o uso do GPS uma ferramenta promissora. Porém, a falta de conhecimentosobre o sistema pode vir a gerar dados georreferenciados com baixa precisão ede forma errônea.
2 SATÉLITES GPS (projeto NAVSTAR-GPS) GPS: CONCEITOS E APLICAÇÕES.
Os satélites foram construídos em vários blocos, cada um comcaracterísticas particulares, incorporando novas mudanças ou desenvolvimento
de equipamentos.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 27/40
27
Bloco I: os satélites foram desativados em 1995, operavam com autonomia de3,5 dias, possuíam sensores que detectavam explosões nucleares ocorridas naatmosfera ou no espaço, além de realizar o posicionamento na terra.
Bloco II e IIA: são compostos por 28 satélites, os quais se referem a primeira esegunda geração de satélites GPS. Os satélites do Bloco IIA apresentamcomunicação recíproca e maior capacidade de armazenamento de dados denavegação.
Bloco IIR: terceira geração de satélites GPS vem substituindo os satélites dobloco IIA. A principal mudança é a capacidade de medir distancias e calcular asefemérides no próprio satélite transmitindo estas informações entre os satélites epara o sistema de controle da Terra. Esses satélites carregam padrões defreqüência altamente estáveis oriundos dos osciladores atômicos de césio erubídio. Começaram a ser lançados em 1997 (Atualmente com 8 satélites emórbita).
Bloco IIF: quarta geração de satélites GPS, deverá substituir a IIR será composta
de 33 satélites, sendo que estes poderão carregar osciladores máster dehidrogênio considerados até o momento como sendo os melhores alem de outrasmodernizações. Lançamentos programados para 2007.
3 CARACTERÍSTICAS DO SINAL GPS.
Os sinais emitidos pelos satélites são transmitidos através de ondas
(portadoras) sendo:
L1: com freqüência 1575.42 MHz e 19 cm de comprimento de onda.L2: com freqüência de 1227.60 MHz e 24 cm de comprimento de onda.
As ondas portadoras são moduladas a uma freqüência de pulsos:
Código P: (precision code) com freqüência de 10.23 MHz, esse códigose repete a cada 267 dias.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 28/40
28
Código C/A: (coarsel /aquisition code) com freqüência de 1.023MHz e
repetida a cada milisegundo.
Código Y ou AS: (anti spoofing) gerada a partir de uma equaçãosecreta e tem função controlar o uso do sistema.
Alem do código Y ou AS o departamento de defesa dos EUA incluía umerro proposital na mensagem enviada pelo satélite conhecida como “selectiveAvaitabili” ou S/A. Esse erro proposital foi retirado em 1999, pelo presidenteamericano Bill Clinton.
Dessa forma a portadora L1 é modulada com os códigos C/A, P. Sendoa L2 apenas com devido código P.
Devido à freqüência mais alta (10.23MHz) o código P fornece uma maiorprecisão na determinação das coordenadas, sendo seu uso restritivo para finsmilitares.
A portadora L2 tem a principal função de corrigir o clock do satélitemelhorando assim os cálculos do posicionamento.
4 SEGMENTOS DO SISTEMA GPS.
O GPS consiste de três segmentos principais, o espacial, de controle ede usuários.
4.1 Segmento Espacial.
É composto por uma constelação de 24 satélites mais 4, que orbitam aoredor da terra a uma altitude de 20.200km. Os satélites são distribuídos em 6planos orbitais, sendo que cada plano tem 4 satélites. Os planos orbitaisapresentam uma inclinação de 55 o em relação ao equador, com um período derevolução de 12h siderais.
Essa configuração garante que, no mínimo, quatro satélites GPS sejam
visíveis em qualquer lugar da superfície terrestre ou acima dela a qualquer horado dia ou da noite.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 29/40
29

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 30/40
30
4.2 Segmento de Controle.
Tem como principais tarefas:- Manter e controlar continuamente o sistema de satélites- Controlar o tempo GPS- Calcular as correções dos relógios dos satélites- Predizer as efemérides dos satélites- Atualizar periodicamente as mensagens de navegação dos satélites- Controle de degradação do sinal- Lançamento de novos satélites
Estação mestra: Colorado Spring, Base Falcon (Força Aérea dos EstadosUnidos, USFA).Estações de monitoramento: Hawaí, Atlântico Sul, Oceano Índico e Pacífico.
4.3 Segmento dos Usuários.
Pode ser dividido em civil e militar, sendo que para uso civil existerestrição quanto à precisão.
Uso militar : posição e deslocamento de tropas, navegação em geral,lançamento de mísseis em alvos inimigos, entre outros.
Uso civil: navegação nos meios de transporte, caminhamentos,
movimentos de placas tectônicas, esportes radicais, correção geométricas deaerofotos e imagens de satélites, levantamentos topográficos, estudosgeodésicos, agricultura de precisão, entre outros.
5 PRINCÍPIO DE FUNCIONAMENTO.
De uma forma resumida pode-se dizer que o posicionamento GPS é
realizado por meio de uma triangulação entre os satélites e o receptor GPS(Figura abaixo).

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 31/40
31
D1
D2
D3
D1
D2
D3
D4
12
3
Receptor GPS
D1
D2
D3
D1
D2
D3
D4
12
3
Receptor GPS O cálculo da posição de um ponto de coordenadas x, y e z, através do
GPS, inicia-se pela determinação das distâncias (D) entre o receptor e pelomenos três satélites (posição X e Y apenas). Como o posicionamento exato dossatélites no espaço é conhecido e monitorado, temos todas as distâncias (d) entreos satélites. Dessa forma é possível realizar a triangulação, onde essa situaçãoreduz a apenas duas as possibilidades das coordenadas do ponto onde está oreceptor. Através de programação computacional os receptores distinguem entreessas duas coordenadas qual é a posição correta, uma vez que uma dasposições é normalmente absurda.
Como existe uma defasagem entre o relógio do receptor (quartzo)menor precisão, e o relógio do satélite (atômico) maior precisão, a sincronia dosinal não é perfeita, sendo necessários pelo menos quatro satélites para adeterminação das coordenadas x, y e z.
Para que seja possível se realizar a triangulação o sistema determina adistância do satélite ao receptor através da diferença de tempo que um sinal derádio (L1, L2 e código) leva ao sair do satélite e chegar ao receptor e do receptor

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 32/40
32
ao satélite, a que é possível através da geração simultânea e sincronizada dossinais idênticos pelo satélite e pelo receptor GPS.
6 ERRO NA EXATIDÃO DO POSICIONAMENTO.
a) MulticaminhamentoOs sinais transmitidos pelos satélites podem ser absorvidos, refletidos
ou refratados objetos próximos a antena ou entre a antena do receptor e osatélite, gerando-se, assim, um tempo maior, o que acarreta uma maior distânciae uma coordenada imprecisa.Assim recomenda-se que a horizontal em torno da antena esteja desobstruídaacima de 15o.
b) DOP (dilution of precision) (PDOP) Este fator está relacionado com a disposição geométrica dos satélites
(Figura abaixo).

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 33/40
33
Baixo PDOP
2a
Alto PDOP
2b
Devido a maior proximidade entre os satélites na figura 2b, atriangulação não é tão boa, o que ocasiona um aumento do PDOP econseqüentemente uma menor precisão nas coordenadas x, y e z, já na figura 2aa geometria dos satélites favorece a triangulação, sendo o PDOP mais baixo,promovendo assim uma maior precisão nas coordenadas x, y e z. Algunsfabricantes recomendam valores de PDOP menor que 6, para maior precisão dosdados, sendo que valores de PDOP maiores são descartados.
c) Local Evitar proximidade a locais como, estações de transmissão de
microondas, radares, antenas de rádio – repetidoras e linhas de alta voltagem, asquais representam fontes de erros para os sinais GPS. Incluí-se aqui coberturavegetal densa.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 34/40
34
7 MÉTODOS DE POSICIONAMENTO.
7.1 Método Absoluto.No método absoluto a determinação das coordenadas x, y e z está
relacionada apenas aos satélites GPS e ao receptor (Figura Abaixo).
D1D2
D3
D1
D2
D3
D4
1 2 3
Receptor GPS
D1D2
D3
D1
D2
D3
D4
1 2 3
Receptor GPS Geralmente esse método apresenta baixa precisão, trabalhando apenas
com a portadora L1 e códigos C/A.
7.2 Método Diferencial ou Relativo.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 35/40
35
O conceito fundamental desse método é que dois ou mais receptoresrastreiam, simultaneamente, um grupo de satélites com pelo menos dois satélitesem comum (satélites 3 e 4). Para tanto um desses receptores está locado em umponto de coordenadas x, y e z conhecidas denominado de Estação Base. Osdemais receptores GPS, denominados de Rover, serão corrigidos através da
Base.
Receptor Rover Receptor Base
Ponto 1 Ponto 1Ponto 2Ponto 2
Ponto 3 Ponto 3
Tempo 1 – Ponto 1Tempo 2 – Ponto 2Tempo 3 – Ponto 3
Tempo 1 – Ponto 1Tempo 2 – Ponto 2Tempo 3 – Ponto 3
X,Y, Zdesconhecido
X,Y, Zconhecido
1
23
45
6
Receptor Rover Receptor Base
Ponto 1 Ponto 1Ponto 2Ponto 2
Ponto 3 Ponto 3
Tempo 1 – Ponto 1Tempo 2 – Ponto 2Tempo 3 – Ponto 3
Tempo 1 – Ponto 1Tempo 2 – Ponto 2Tempo 3 – Ponto 3
X,Y, Zdesconhecido
X,Y, Zconhecido
1
23
45
6
A base apresenta uma coordenada conhecida e precisa. Num
determinado Tempo 1, igual para ambos os receptores GPS (Base e Rover) foiadquirido e armazenado informações sobre o Ponto 1. É possível se notar naBase que ocorria um deslocamento do Ponto 1 em 100 metros em uma certadireção. Dessa forma para o Rover, que adquiriu o Ponto 1 no mesmo Tempo 1,considera-se que esse erro de posicionamento também tenha ocorrido por umainterferência do sinal dos satélites GPS. Dessa forma é possível corrigir o Ponto 1do Rover sabendo que o mesmo encontra-se deslocado (visto a referencia daBase).

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 36/40
36
O mesmo pode ser realizado para os Pontos 2 e 3 nos Tempos 2 e 3 doRover, pois a Base esta armazenando esses dados nos mesmos tempos, compelo mesmos dois satélites em comum.
a) Método Diferencial: pós-processado
Alguns aparelhos GPS possibilitam o armazenamento das informaçõesdos pontos coletados (principalmente as coordenadas x, y e z).
Dessa forma, é possível que os dados dos aparelhos GPS Rover e Baseserem armazenados.
Utilizando-se de programas específicos esses dados (Base e Rover)podem ser descarregados em computadores, geralmente através de portasseriais, e realizada a correção dos dados do Rover pelos dados da Base, assimcomo já explicado para o método diferencial.
Como o processamento ocorre depois da coleta dos dados édenominado de método diferencial pós-processado.
b) Método Diferencial: tempo real
Nesse método ao invés dos dados de Rover e Base serem processadose corrigidos posteriormente, isso ocorre no exato momento da coleta.
As informações necessárias para esse processamento são transmitidasem ondas de rádio da Base para o Rover sendo que no momento da leitura doponto as coordenadas x, y e z já estão corrigidas pela Base (Figura Abaixo).

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 37/40
37
8 TIPOS DE RECEPTORES GPS.
Os receptores podem ser classificados de três formas:- Quanto ao tipo de usuário : militar e civil.- Quanto a aplicação : navegação, estudos geodésicos, levantamentos diversos,
entre outros.- Quanto ao tipo de portadora e código.
Para o uso civil podem-se diferenciar os aparelhos encontrados nomercado pela precisão que eles oferecem uma vez que se torna possívelencontra-los desde aparelhos GPS em relógios até aparelhos de uso geodésicocom diferentes níveis de precisão na medida das coordenadas no ponto.
Torna-se interessante dividir os aparelhos ou receptores de acordo com arespectiva precisão e possibilidade de realizar ou não o método diferencial.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 38/40
38
-Aparelhos de baixa precisão : aparelhos de uso civil, com antena interna, queidentificam apenas o código C/A. Sendo geralmente o erro até 30 m sem apossibilidade de transferir os dados para o computador (sem correção diferencial).
-Aparelhos de média precisão: aparelhos de uso civil, com antena interna nãoamplificada, que identificam apenas a portadora L1 com o código C/A. Sendopossível transferir os dados armazenados e processá-los no método diferencial(DGPS), com erro após o processamento de alguns metros. Esses aparelhostambém possibilitam configurar o setup.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 39/40
39
-Aparelhos de alta precisão: aparelhos denominados de sub-métrico de usocivil, com antena externa pré-amplificada (que favorecem a recepção do sinal dosatélite), também é possível configurar o setup do aparelho e trabalhar no modoDGPS. Identificamos a portadora L1 códigos C/A. Apresentam erro sem correçãode 1 à 10m e após correção de alguns centímetros.
-Aparelhos de altíssima precisão: uso militar e geodésico, são aparelhos comantena externa pré-amplificada que identificam as portadoras L1 e L2 e oscódigos C/A. Também possibilita trabalhar no modo DGPS. Apresentam erros dealguns milímetros.

8/20/2019 Apostila GPS - Apontamentos de aula
http://slidepdf.com/reader/full/apostila-gps-apontamentos-de-aula 40/40
40
9 APLICAÇÃO NA AGRICULTURA.
Agricul tura de precisão: A agricultura de precisão consiste em semanejar as culturas de forma a conhecer as suas necessidades metro a metro.Sendo que se torna de extrema importância na obtenção de coordenadas ponto aponto geralmente em tempo real, sendo que estes dados georeferenciados vãoalimentar bancos de dados para Sistemas de Informação Geográfico (SIG).
Levantamentos topográficos: A topografia é a ciência aplicada queestuda os métodos e equipamentos para representação de parte da superfície daterra para fins de projetos. Sendo assim o GPS uma ferramenta importante nademarcação de pontos de base para se iniciar um levantamento, sendointeressante e mais recomendável a sua utilização no auxilio do levantamento
justamente com outros equipamentos e métodos mais tradicionais como aestação total.
Levantamento de solos: Tem por objetivo a divisão de áreasheterogêneas em áreas homogêneas, através de parâmetros de classificação
definidos e das características utilizadas para diferenciação de solos em funçãoda escala. Para tanto, a amostra de solo e o envio para o laboratório (dadosquímicos e físicos) se torna necessário. O GPS proporciona demarcar essasamostras no campo, permitindo organizar esses dados espacialmente dentro deum SIG, facilitando a delimitação das unidades de mapeamento tornando-as maisprecisas.
Interpretação da verdade terrestre X SIG: Todos os dadosimagináveis que ocupem uma posição no espaço na terra podem sergeoreferenciados, com aparelhos GPS. Aos pontos georreferenciados pode-seassociar vários atributos os quais podem ser colocados em planos deinformações diferenciados. Dessa forma inicia-se a montagem de um banco dedados em um Sistema de Informações Geográficas. O GPS promove a interaçãodos dados na superfície terrestre e o SIG.

























![[CF] Apontamentos](https://img.pdfslide.net/doc/110x75/5571fa184979599169913f45/cf-apontamentos.jpg)



