-
Appendix APosition Kinematic Analysis.Trigonometric Method
Chapter 3 shows the kinematic analysis of several mechanisms by
using Raven’smethod. Writing the equations that solve the problem
when using this method iseasy. However, finding the solution to
such equations can be a complicated task.For that reason, we
introduce the trigonometric method in this appendix, which ismuch
simpler to write and solve.
A.1 Position Analysis of a Four-Bar Mechanism
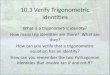
Consider the mechanism shown in Fig. A.1 in which O2O4, O2A, AB
and O4A arethe lengths of links 1, 2, 3 and 4 respectively. On the
other hand, angles h2, h3 andh4 define the angular position of
links 2, 3 and 4 considering the counterclockwiserotations
positive.
In order to determine angles h3 and h4, we need to find the
value of distance O4A(Eq. A.1) as well as angles b (Eq. A.3), d
(Eq. A.7) and / (Eq. A.5). The value ofdistance O4A can be
determined in triangle DO2AO4:
O4A
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiO2O4
2 þO2A2 � 2O2O4O2A cos h2q
ðA:1Þ
The same triangle verifies (Eq. A.2):
O4A sin b ¼ O2A sin h2 ðA:2Þ
where:
b ¼ arcsin O2AO4A
sin h2
� �ðA:3Þ
Angles / and d between bars 3 and 4 and diagonal O4A
respectively, can beworked out from triangle DABO4. It verifies
(Eq. A.4)
© Springer International Publishing Switzerland 2016A. Simón
Mata et al., Fundamentals of Machine Theory and
Mechanisms,Mechanisms and Machine Science 40, DOI
10.1007/978-3-319-31970-4
367
http://dx.doi.org/10.1007/978-3-319-31970-4_3
-
O4B2 ¼ AB2 þO4A2 � 2ABO4A cos/ ðA:4Þ
We can clear / from Eq. (A.4):
/ ¼ arccosAB2 þO4A2 � O4B2
2ABO4AðA:5Þ
In the same triangle its verified (Eq. A.6):
O4B sin d ¼ AB sin/ ðA:6Þ
Thus:
d ¼ arcsin ABO4B
sin/� �
ðA:7Þ
Once the values of b, d and / have been determined, we can
obtain h3 (Eq. A.8)and h4 (Eq. A.9) in the mechanism (Fig.
A.1):
h3 ¼ /� b ðA:8Þ
h4 ¼ �ðbþ dÞ ðA:9Þ
When angle h2 takes values between 180° and 360°, angle b has a
negative valueand Eqs. (A.8) and (A.9) are also applicable (Fig.
A.2).
2O 4O
A
B
2θ
3θ
4θ
β δφ
Fig. A.2 Open four-barmechanism with link 2 in aposition between
180° and360°
2O 4O
A
B
2θ
3θ
4θ
β
δ
φ
Fig. A.1 Parametersinvolved in the calculation ofthe link
positions in a four-barmechanism by means of thetrigonometric
method
368 Appendix A: Position Kinematic Analysis. Trigonometric
Method
-
For a crossed four-bar mechanism (Fig. A.3) we will use Eqs.
(A.10) and (A.11):
h3 ¼ �ð/þ bÞ ðA:10Þ
h4 ¼ d� b ðA:11Þ
Again, when angle h2 takes values between 180° and 360°, angle b
has anegative value and Eqs. (A.10) and (A.11) are also applicable
(Fig. A.4).
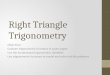
A.2 Position Analysis of a Crank-Shaft Mechanism
Figure A.5 shows a crank-shaft mechanism. xB and yB are the
Cartesian coordinatesof point B with respect a system centered on
point O2 with its X-axis parallel to thepiston trajectory. xB is
positive while yB is negative.
2O 4O
A
B
2θ
3θ
4θ
βδ
φ
Fig. A.3 Calculation of theposition of links 3 and 4 in acrossed
four-bar mechanismby means of the trigonometricmethod
2O 4O
AB
2θ
3θ
4θ
βδ
φ
Fig. A.4 Crossed four-barmechanism with link 2 in aposition
between 180° and360°
2O
A
B
23
4
2θ
3θ
μ
Bx
By
Fig. A.5 Crank-shaft mecha-nism and the parametersinvolved in
the position anal-ysis with the trigonometricmethod
Appendix A: Position Kinematic Analysis. Trigonometric Method
369
-
Position of links 3 and 4 can be worked out using Eqs.
(A.12)–(A.15):
AB sin l ¼ O2A sin h2 � yB ðA:12Þ
l ¼ arcsinO2A sin h2 � yBAB
ðA:13Þ
h3 ¼ �l ðA:14Þ
The x position of point B will be given by Eq. (A.15):
xB ¼ O2A cos h2 þAB cos h3 ðA:15Þ
It can easily be verified that Eq. (A.15) works for any position
of input link 2.When the trajectory of point B is above O2, the
sign of yB is positive and theseequations are also applicable.
A.3 Position Analysis of a Slider Mechanism
Consider the slider mechanism in Fig. A.6, where link 3
describes a straight tra-jectory along link 4 that rotates about O4
with offset O4B.
Similarly as in previous problems, O2O4 and O2A are the lengths
of links 1 and 2respectively while angles h2 and h4 define the
angular position of links 2 and 4.Assuming that we know O2O4, O2A
and h2, we can obtain unknown values AB(Eq. A.17) and h4 (Eq.
A.20). To do so, we start by obtaining the value of O4A(Eq.
A.16):
O4A
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiO2O4
2 þO2A2 � 2O2O4O2A cos h2q
ðA:16Þ
We can calculate AB as:
AB
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiO4B
2 � O4A2q
ðA:17Þ
2O
A
B
2
3
42θ
4θ
4Oβ
δ
Fig. A.6 Position analysis ofa slider-mechanism by meansof the
trigonometric method
370 Appendix A: Position Kinematic Analysis. Trigonometric
Method
-
The value of angle d (Eq. A.18) is:
d ¼ arctan O2A sin h2O2O4 þO2A cos h2
ðA:18Þ
Finally, h4 can be determined after first computing the value of
b (Eq. A.19):
b ¼ arctan ABO4B
ðA:19Þ
h4 ¼ dþð90� � bÞ ðA:20Þ
If the offset is opposite, point B is below the X-axis and Eq.
(A.20) changes toEq. (A.21):
h4 ¼ d� ð90� � bÞ ðA:21Þ
A.4 Two Generic Bars of a Mechanism
Let us consider that we have carried out the kinematic analysis
of links 2, 3 and 4 ofthe mechanism shown in Fig. A.7. We will
continue the position analysis of links 5and 6 considering that the
position of point C of link 3 is known.
To find the position of links 5 and 6 we have to define triangle
DCDO6 first(Fig. A.8).
The length of side O6C (Eq. A.22) can be calculated by means of
the x andy coordinates of points C and O6:
O6C
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxC
� xO6Þ2 þðyC � yO6Þ2
qðA:22Þ
2O 4O
A
B
C
D
6O
2
3
4
5
6
Fig. A.7 Six-bar mechanism
Appendix A: Position Kinematic Analysis. Trigonometric Method
371
-
And its angle c (Eq. A.23) is:
c ¼ arctan yC � yO6xC � xO6
ðA:23Þ
Angle / (Eq. A.25) can be computed by using the law of cosines
(Eq. A.24):
DO62 ¼ CD2 þO6D2 � 2CDO6D cos/ ðA:24Þ
/ ¼ arccosCD2 þO6D2 � DO62CDO6D
ðA:25Þ
Finally, angle d (Eq. A.26) is determined by using the law of
sines:
d ¼ arcsin CDO6D
sin/� �
ðA:26Þ
Therefore, angles h5 and h6 are (Eqs. A.27 and A.28):
h5 ¼ /� ð180� � cÞ ðA:27Þ
h6 ¼ 180� þ c� d ðA:28Þ
6O
C
γ
5θ
6θ
δ
φ
DFig. A.8 Position analysis ofbars 5 and 6 by means of
thetrigonometric method
372 Appendix A: Position Kinematic Analysis. Trigonometric
Method
-
Appendix BFreudenstein’s Method to Solvethe Position Equations
in a Four-BarMechanism
In Chap. 3 we developed the position analysis of a four-bar
mechanism by means ofRaven’s method. In this appendix we explain
Freudenstein’s method to solve theobtained equations and calculate
the value of angles h3 and h4.
B.1 Position Analysis of a Four-Bar Mechanism by UsingRaven’s
Method
We will apply Raven’s method to the four-bar mechanism shown in
Fig. B.1.The vector loop equation (Eq. B.1) for the position
analysis of the mechanism is:
r1eih1 ¼ r2eih2 þ r3eih3 þ r4eih4 ðB:1Þ
By converting this equation into its trigonometric form (Eq.
B.2):
r1ðcos h1 þ i sin h1Þ ¼ r2ðcos h2 þ i sin h2Þþ r3ðcos h3 þ i sin
h3Þþ r4ðcos h4 þ i sin h4Þ
ðB:2Þ
And by separating its real and imaginary parts, we obtain the
system (Eq. B.3)with two unknowns (h3 and h4):
r1 cos h1 ¼ r2 cos h2 þ r3 cos h3 þ r4 cos h4r1 sin h1 ¼ r2 sin
h2 þ r3 sin h3 þ r4 sin h4
)ðB:3Þ
B.2 Freudenstein’s Method
We substitute h1 ¼ 0 in Eq. (B.3) and isolate h3 (Eq. B.4):
© Springer International Publishing Switzerland 2016A. Simón
Mata et al., Fundamentals of Machine Theory and
Mechanisms,Mechanisms and Machine Science 40, DOI
10.1007/978-3-319-31970-4
373
http://dx.doi.org/10.1007/978-3-319-31970-4_3
-
r1 � r2 cos h2 � r4 cos h4 ¼ r3 cos h3�r2 sin h2 � r4 sin h4 ¼
r3 sin h3
)ðB:4Þ
We raise each equation to the second power and add them term by
term(Eq. B.5):
r21 þ r22 þ r24 � 2r1r2 cos h2 � 2r1r4 cos h4 þ 2r2r4ðcos h2 cos
h4 þ sin h2 sin h4Þ ¼ r23ðB:5Þ
By dividing all terms by the coefficient of term cos h2 cos h4 þ
sin h2 sin h4,2r2r4, it yields Eq. (B.6):
r21 þ r22 � r23 þ r242r2r4
� r1r4cos h2 � r1r2 cos h4 þðcos h2 cos h4 þ sin h2 sin h4Þ ¼ 0
ðB:6Þ
In order to simplify Eq. (B.6), we use the following
coefficients (Eq. B.7):
k1 ¼ r1r2k2 ¼ r1r4k3 ¼ r
21 þ r22 � r23 þ r24
2r2r4
9>>>>>>=>>>>>>;
ðB:7Þ
Thus, Eq. (B.6) remains Eq. (B.8):
k3 � k2 cos h2 � k1 cos h4 þðcos h2 cos h4 þ sin h2 sin h4Þ ¼ 0
ðB:8Þ
We substitute cos h4 and sin h4 for their expressions in terms
of the half angletangent (Eq. B.9):
2O 4O
2r
3r
4r
A
B
1r2θ
3θ
4θFig. B.1 Position analysis ofa four-bar mechanism bymeans of
Raven’s method
374 Appendix B: Freudenstein’s Method to Solve …
-
k3 � k2 cos h2 � k11� tan2 h421þ tan2 h42
þ cos h21� tan2 h421þ tan2 h42
þ sin h22 tan h42
1þ tan2 h42
!¼ 0
ðB:9Þ
Next, we remove the denominators and group the terms for tan,
tan2 and theindependent term (Eq. B.10), all in the same
member.
ðk3 � k2 cos h2 � k1 � cos h2Þ tan2 h42 þ 2 sin h2 tanh42
þðk3 � k2 cos h2 � k1 þ cos h2Þ ¼ 0ðB:10Þ
Again, we rename the different coefficients (Eq. B.11) of the
second degreeequation:
A ¼ k3 � k2 cos h2 � k1 � cos h2B ¼ 2 sin h2C ¼ k3 � k2 cos h2 �
k1 þ cos h2
9=; ðB:11Þ
Thus, Eq. (B.10) can be written as Eq. (B.12):
A tan2h42
þB tan h42
þC ¼ 0 ðB:12Þ
Hence, h4, which is the unknown that defines the angular
position of link 4, is(Eq. B.13):
h4 ¼ 2
arctan�B�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiB2
� 4AC
p
2AðB:13Þ
where the + and − signs indicate two possible solutions for the
open and crossedconfigurations of the four-bar mechanism
respectively.
Similarly, but in this case isolating h4 in one of the members,
we reach(Eq. B.14) for h3, which defines the angular position of
link 3. Again, there are twopossible solutions depending on the
configuration of the four-bar mechanism:
h3 ¼ 2 arctan�E
�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE2 �
4DF
p
2DðB:14Þ
where the different coefficients (Eq. B.15) of the second degree
equation (Eq. B.14)are:
Appendix B: Freudenstein’s Method to Solve … 375
-
D ¼ k1 � k4 cos h2 þ k5 � cos h2E ¼ 2 sin h2F ¼ �k1 � k4 cos h2
þ k5 þ cos h2
9=; ðB:15Þ
And k4 and k5 (Eq. B.16) are:
k1 ¼ r1r2k4 ¼ r1r3k5 ¼ r
21 þ r22 þ r23 � r24
2r2r3
9>>>>>>=>>>>>>;
ðB:16Þ
376 Appendix B: Freudenstein’s Method to Solve …
-
Appendix CKinematic and Dynamic Analysisof a Mechanism
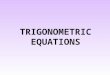
The conveyor transfer mechanism shown in Fig. C.1 pushes boxes
with a mass of8 kg from one conveyor belt to another. The motor
link turns at a constant speed of40 rpm in counter clockwise
direction.
In order to make a complete kinematic and dynamic analysis of
the mechanism,we will use all the analysis methods described in
this book. We will carry out theanalysis at a given position. In
general, the most interesting one for dynamicanalysis is the
position at which the acceleration of the piston is maximum.
Thisway we can determine the forces that act on the links in
extreme conditions. Theposition chosen for this study is h2 ¼
350�.
This analysis includes the following sections:
• Kinematic chain. Study and identification of the kinematic
pairs. Number ofD.O.F of the mechanism. Kinematic inversion that
results from fixing link 4.
• Kinematic graph of slider displacement versus crank rotation.•
Velocity analysis by means of the relative velocity method.•
Velocity analysis by means of the method of Instantaneous Centers
of Rotation.• Acceleration analysis by means of the relative
acceleration method.• Velocity and acceleration analysis by means
of Raven’s method.• Calculation of the inertial force and inertial
torque of each of the links in the
mechanism.• Dynamic analysis by means of the graphical method.•
Dynamic analysis by means of the matrix method.
C.1 Kinematic Chain
We begin the study of the mechanism by drawing its kinematic
diagram as shownin Fig. C.2. This figure also shows the
nomenclature that will be used along thisstudy.
Table C.1 shows the different types of kinematic pairs in the
mechanism and thedegrees of freedom of each pair.
© Springer International Publishing Switzerland 2016A. Simón
Mata et al., Fundamentals of Machine Theory and
Mechanisms,Mechanisms and Machine Science 40, DOI
10.1007/978-3-319-31970-4
377
-
4m
1m
2m
2m
1m6m
3.2m
3m
3.7m
6.5m
Fig. C.1 Conveyor transfer mechanism
23
4
A
B
2O
4O
C
D5
6
Y
X
2θ
3θ
4θ
4ϕ
5θ
2DOx
Fig. C.2 Kinematic diagram of the mechanism
Table C.1 Type of kinematic pairs in the mechanism
PAIR Type Number of D.O.F.
1–2 Rotation 1
2–3 Rotation 1
3–4 Rotation 1
1–4 Rotation 1
4–5 Rotation 1
5–6 Rotation 1
1–6 Prismatic 1
378 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
We use Kutzbach’s equation to calculate the number of degrees of
freedom ofthe mechanism (Eq. C.1):
• Number of links: N = 6• Kinematic pairs with 1 DOF: J1 ¼ 7•
Kinematic pairs with 2 DOF: J2 ¼ 0
DOF ¼ 3ðN � 1Þ � 2J1 � J2 ¼ 3ð6� 1Þ � 2 � 7� 0 ¼ 1 ðC:1Þ
To better understand the mechanism, we will draw the kinematic
diagram of oneof its inversions. In this case we will consider link
4 as the frame. This is shown inFig. C.3.
C.2 Slider Displacement Versus Crank Rotation
We will draw the kinematic graph of point D displacement versus
crank rotation bymeans of the graphical method. To do so, we divide
the whole turn of the crank in12 positions starting from position
0�. This way, we find the 12 positions of point Awhich correspond
to 12 angular positions of the crank in steps of 30°. Knowing
thelength of the links, we can find the equivalent 12 positions for
points B, C and D(Fig. C.4).
We can graph the position of point D versus the crank position.
This is shown inFig. C.5. We can see that the stroke end positions
of the piston are close to posi-tions h2 ¼ 10� and h2 ¼ 195�. In
these positions, the velocity of the piston has to benull. As the
velocity is the first time-derivative of displacement, this can be
verifiedby tracing a line tangent to the curve at the end-of-stroke
position. If the line ishorizontal, the velocity is null.
23
4
5
61
Fig. C.3 Kinematic inver-sion of the mechanism whenlink 4 is
fixed
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
379
-
C.3 Velocity Analysis by Relative Velocity Method
Before starting the velocity analysis, the positions of the
links have to be deter-mined. To do so, we will use the
trigonometric method explained in Appendix A.Figure C.6 shows the
angles and distances used to solve the position problem.
We start with the four-bar mechanism formed by links 1, 2, 3 and
4. DistanceO2O4 (Eq. C.2) and angles h1 (Eq. C.3) and c (Eq. C.4)
can be calculated as:
23
4
A
B
2O
4O
C
D5
6
Fig. C.4 Kinematic diagram of the mechanism in a complete turn
of the crank in steps of 30°
2DOx
2θ0
5−
4−
360°
3−
2−
90° 180° 270°
1−
Fig. C.5 Kinematic graph of the slider displacement versus the
crank rotation
380 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
O2O4
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxO4
� xO2Þ2 þðyO4 � yO2Þ2
q¼ 4:206m ðC:2Þ
h1 ¼ 270� þ arctan 3:72 ¼ 331:6� ðC:3Þ
c ¼ 180� � 90� � arctan 3:72
¼ 28:4� ðC:4Þ
The application of the cosine rule to triangle DO2AO4 yields
(Eq. C.5):
O4A
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiO2O4
2 þO2A2 � 2O2O4O2A cosðh2 � h1Þq
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4:2062
þ 12 � 2 � 4:206 cos 18:4�
p¼ 3:272m
ðC:5Þ
And the sine rule on the same triangle yields (Eqs.
C.6–B.7):
O4A sinðb� cÞ ¼ O2A sinðh2 � h1Þ ðC:6Þ
b ¼ cþ arcsinO2A sinðh2 � h1ÞO4A
¼ 28:4� þ arcsin sin 18:43:272
¼ 33:9� ðC:7Þ
The application of the cosine rule to triangle DABO4 yields
(Eqs. C.8 and C.9):
O4B2 ¼ AB2 þO4A2 � 2ABO4A cos/ ðC:8Þ
23
4
A
B
2O
4O
C
D5
6
1θφ 4
ϕ
4DOx
β
γ
δ
4DOy
2 4O Ox
2DOx
Fig. C.6 Calculation of theposition of links 3, 4, 5 an 6by
means of the trigonometricmethod
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
381
-
/ ¼ arccosAB2 þO4A2 � O4B2
2ABO4A
¼ arccos 42 þ 3:2722 � 322 � 4 � 3:272 ¼ 47:4
�ðC:9Þ
Thus, the positions of the link 3 (Eq. C.10) is:
h3 ¼ /� b ¼ 47:4� � 33:9� ¼ 13:5� ðC:10Þ
The application of the sine rule to triangle DABO4 yields (Eqs.
C.11 and C.12):
O4B sin d ¼ AB sin/ ðC:11Þ
d ¼ arcsin ABO4B
sin/� �
¼ arcsin 4 sin 47:4�
3
� �¼ 79:12�
ðC:12Þ
Therefore, the position of link 4 (Eq. C.13) is:
h4 ¼ 180� � b� d ¼ 180� � 33:9� � 79:12� ¼ 67� ðC:13Þ
We continue with the position analysis of the crank-shaft
mechanism formed bylinks 4, 5 and 6 in Fig. C.6.
Although angle u4 formed by O4B and O4C has a fixed value and it
could bepart of the data of the mechanism, in this case we have the
length of the sides oftriangle DO4BC instead of angle u4 itself. We
can easily obtain its value (Eq. C.15)by means of the rule of
cosines (Eq. C.14):
BC
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiO4B
2 þO4C2 � 2O4BO4C cosu4q
ðC:14Þ
u4 ¼ arccosO4B
2 þO4C2 � BC22O4BO4C
!
¼ arccos 32 þ 62 � 3:222 � 3 � 6
� �¼ 15:1�
ðC:15Þ
The projection of triangle DO4CD over a direction perpendicular
to the trajectoryof the piston yields the trigonometric equation
(Eq. C.16):
yDO4 þCD sin h5 ¼ O4C sinðh4 þu4Þ ðC:16Þ
382 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
And clearing h5 (Eq. C.17), we obtain its value:
h5 ¼ arcsinO4C sinðh4 þu4Þ � yDO4CD
¼ arcsin 6 sinð67� þ 15:1�Þ � 56:5
¼ 8:34�ðC:17Þ
The projection of the sides of triangle DO4CD over de piston
trajectory yields(Eq. C.18):
xDO4 ¼ O4C cosðh4 þu4Þ � CD cos h5¼ 6 cosð67� þ 15:1�Þ � 6:5 cos
8:34� ¼ �5:607m ðC:18Þ
Hence, the horizontal component of the distance between D and O2
(Eq. C.19)is:
xDO2 ¼ xDO4 � xO2O4 ¼ �5:607m� ð�3:7mÞ ¼ �1:907m ðC:19Þ
Therefore, the positions of the links (Eq. C.20) corresponding
to crank positionh2 ¼ 350� are:
h3 ¼ 13:5�h4 ¼ 67�h5 ¼ 8:34�
xDO2 ¼ �1:907m
9>>>=>>>;
ðC:20Þ
The following step is to find the velocity of the links when
link 2 rotates at anangular speed of 40 rpm counterclockwise. We
have to use the velocity of link 2 inradians per second: 4.19
rad/s.
The velocity of point A (Eq. C.21) can be calculated as:
vA ¼ x2 ^ rAO2 ¼î ĵ k̂
0 0 4:19
1 cos 350� 1 sin 350� 0
�������������� ¼ 0:73̂iþ 4:13̂j
¼ 4:19 cm=s\80�ðC:21Þ
To calculate the angular velocity of links 3 and 4 we have to
use the relativevelocity vector equation: vB ¼ vA þ vBA.
Vectors vB and vBA can be obtained the following way (Eqs. C.22
and C.23):
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
383
-
vBA ¼ x3 ^ rBA ¼î ĵ k̂0 0 x3
4 cos 13:5� 4 sin 13:5� 0
������������
¼ �4x3ðsin 13:5�̂i� cos 13:5� ĵÞ ðC:22Þ
vB ¼ x4 ^ rBO4 ¼î ĵ k̂0 0 x4
3 cos 67� 3 sin 67� 0
������������ ¼ �3x4ðsin 67�̂i� cos 67� ĵÞ
ðC:23Þ
By introducing the three velocity vectors, vA, vB and vBA, in
the relative velocityequation and projecting them on the X and Y
Cartesian axles, we reach the system ofequations (Eq. C.24):
0:73� 4x3 sin 13:5� ¼ �3x4 sin 67�4:13þ 4x3 cos 13:5� ¼ 3x4 cos
67�
)ðC:24Þ
The solution to the system of equations (Eq. C.24) yields the
velocities of links 3and 4 (Eq. C.25):
x3 ¼ �1:27 rad=sx4 ¼ �0:69 rad=s
�ðC:25Þ
Using these values, we can calculate velocities vB (Eq. C.26)
and vBA(Eq. C.27):
vB ¼ 1:91̂i� 0:81̂j ¼ 2:08m=s\336:96�13:5 ðC:26Þ
vBA ¼ 1:185̂i� 4:939̂j ðC:27Þ
The velocity of point C (Eq. C.28) can be determined by using
the value of x4:
vC ¼ x4 ^ rCO4 ¼î ĵ k̂
0 0 x46 cosð67� þ 15:1�Þ 6 sinð67� þ 15:1�Þ 0
��������������
¼ 4:12̂i� 0:58̂j ¼ 4:16m=s\352:1�ðC:28Þ
We use vector equation (C.29) to calculate the angular velocity
of link 5 and thelinear velocity of link 6.
384 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
vD ¼ vC þ vDC ðC:29Þ
Since points C and D are two points of the same link, their
relative velocity isgiven by Eq. (C.30):
vDC ¼ x5 ^ rDC ¼î ĵ k̂
0 0 x56:5 cosðh5 þ 180�Þ 6:5 sinðh5 þ 180�Þ 0
��������������
¼ �6:5x5ðsinðh5 þ 180�Þ̂i� cosðh5 þ 180�Þ̂jÞ
ðC:30Þ
The velocity of point D (Eq. C.31) has the same direction as the
trajectory.Therefore, its vertical component is null:
vD ¼ vD î ðC:31Þ
By substituting the three velocity vectors, vC, vD and vDC, in
Eq. (C.29) weobtain the system of equations (Eq. C.32):
4:12� 6:5x5 sin 188:3� ¼ vD�0:58þ 6:5x5 cos 188:3� ¼ 0
)ðC:32Þ
Hence, the values of the velocities of links 5 and 6 (Eq. C.33)
are:
x5 ¼ �0:09 rad=sv6 ¼ vD ¼ 4:04m=s
)ðC:33Þ
And the vector velocity of point D (Eq. C.34) is:
vD ¼ 4:04̂i ¼ 4:04m=s\0� ðC:34Þ
Figure C.7 shows the velocity polygon of the mechanism. We can
see howabsolute velocities start at velocity pole O and relative
velocities connect the endpoints of the absolute velocity vectors.
It can also be seen that triangle Dobc in thepolygon is similar to
DO4BC in the mechanism since their sides are perpendicular.
C.4 Instantaneous Center Method for Velocities
To calculate the ICRs in the mechanism, we start by identifying
the ICRs whichcorrespond to real joints. In this case, the known
ICRs are: I12, I23, I34, I14, I45, I16,and I56 (Fig. C.8).
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
385
-
Then we draw a polygon with as many vertexes as links in the
mechanism. Eachof the sides or diagonals of the polygon represents
one ICR. A solid line is used todraw those ICRs that are already
known while those which are unknown are drawnas dotted lines.
In this case, to calculate the velocity of points B, C and D
(Eqs. C.35–C.39), wehave to obtain ICRs I16, I24 and I46 by using
Kennedy’s theorem.
26D I=v v
23
4
2 12O I=
45C I=
56D I=5
6
46I
24I
16 ( )I ∞
23I
B
4 14O I=
13I26I
23A I=v v
B′
B′v
Bv34I
C′C′v
Cv
A′A′v
Dv
A
36
1
5 4
2
Fig. C.8 Velocity calculation by means of the ICR method
o
Av
Dv
BvCv
BAv
CBvDCv
a
bc
d
AB⊥ 2O A⊥
4O B⊥4O C⊥
DC⊥
BC⊥
Fig. C.7 Velocity polygon
386 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
I26I16I12I24I46
�I24
I23I34I14I12
�I46
I45I56I14I16
�
Figure C.8 shows the graphical development of the method and the
vectorobtained for each velocity.
v23 ¼ vAv23 ¼ I13I23x3 ¼ 3:33m � x3
�! x3 ¼ 1:26 rad=s ðC:35Þ
vB ¼ BI13x3 ¼ 2:08m=s ðC:36Þ
v24 ¼ I12I24x2 ¼ 0:58m � x2v24 ¼ I14I24x4 ¼ 3:52m � x4
�! x4 ¼ 0:69 rad=s ðC:37Þ
vC ¼ I14Cx4 ¼ 4:14m=s ðC:38Þ
v26 ¼ I12I26x2 ¼ 0:96m � x2v26 ¼ vD
�! vD ¼ 4:04m=s ðC:39Þ
C.5 Acceleration Analysis with the Relative
AccelerationMethod
We know that the motor link turns at a constant rate of 40 rpm.
Therefore, itsangular acceleration is null (a2 ¼ 0). In order to
calculate the acceleration of thelinks, we start with the
acceleration of point A (Eq. C.40). The tangential compo-nent will
be zero as it depends on the angular acceleration value. Therefore,
it willhave only one normal component:
aA ¼ anAO2 ¼ x2 ^ vA ¼î ĵ k̂
0 0 4:19
0:73 4:13 0
��������������
¼ �17:3̂iþ 3:06̂j ¼ 17:55m=s2\170�ðC:40Þ
To calculate the angular acceleration of links 3 and 4, we use
the vectors(Eqs. C.41 and C.42):
aB ¼ aA þ aBA ðC:41Þ
anB þ atB ¼ anA þ atA þ anBA þ atBA ðC:42Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
387
-
anB ¼ x4 ^ vB ¼î ĵ k̂0 0 �0:69
1:91 �0:81 0
������������ ¼ �0:559̂i� 1:318̂j ðC:43Þ
atB ¼ a4 ^ rBO4 ¼î ĵ k̂0 0 a4
3 cos 67� 3 sin 67� 0
������������ ¼ �3a4 sin 67�̂iþ 3a4 cos 67� ĵ
ðC:44Þ
anBA ¼ x3 ^ vBA ¼î ĵ k̂0 0 �1:27
1:185 �4:939 0
������������ ¼ �6:272̂i� 1:506̂j ðC:45Þ
atBA ¼ a3 ^ rBA ¼î ĵ k̂0 0 a3
4 cos 13:5� 4 sin 13:5� 0
������������
¼ �4a4 sin 13:5�̂iþ 4a3 cos 13:5� ĵ ðC:46Þ
Substituting these vectors (Eqs. C.43–C.46) in Eq. (C.42) and
projecting themon the Cartesian axles, we reach the system of
equations (Eq. C.47):
�0:559� 3a4 sin 67� ¼ �17:3� 6:272� 4a3 sin 13:5��1:311þ 3a4 cos
67� ¼ þ 3:06� 1:506þ 4a3 cos 13:5�
)ðC:47Þ
The solution yields the angular speed of links 3 and 4 (Eq.
C.48).
a3 ¼ 1:98 rad=s2a4 ¼ 9 rad=s2
�ðC:48Þ
Once a4 is known, we can calculate the acceleration of point B
(Eq. C.49):
aB ¼ �25:4̂iþ 9:24̂j ¼ 27:03m=s\160� ðC:49Þ
The acceleration of point C can be calculated by means of (Eq.
C.50):
aC ¼ aB þ aCB ðC:50Þ
As points B and C belong to the same link, the components of the
relativeacceleration (Eq. C.51) are:
anCB ¼ x4 ^ vCBatCB ¼ a4 ^ rCB
�ðC:51Þ
388 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
Substituting the values previously obtained in Eq. (C.51), we
calculate theacceleration vector of point C (Eq. C.52):
aC ¼ �53:89̂iþ 4:59̂j ¼ 54:06m=s\175� ðC:52Þ
To determine the angular acceleration of link 5 and the linear
acceleration of link6, we use the vector equation (C.53):
anD þ atD ¼ anC þ atC þ anDC þ atDC ðC:53Þ
where:
anD ¼ 0atD ¼ aD î
�ðC:54Þ
anDC ¼ x5 ^ vDCatDC ¼ a5 ^ rDC
�ðC:55Þ
Substituting vectors aC (Eq. C.52), aD (Eq. C.54) and aDC (Eq.
C.55) inEq. (C.53) and projecting them onto the Cartesian axles, we
reach to the system ofequations (Eq. C.56):
aD ¼ �53:89þ 0:052� 6:5a5 sin 188:3�0 ¼ 4:59þ 0:0076þ 6:5a5 cos
188:3�
)ðC:56Þ
The solution of the system yields the accelerations of links 5
and 6 (Eq. C.57):
a5 ¼ 0:72 rad=s2aD ¼ �53:14m=s2
)ðC:57Þ
Thus, the vector acceleration of point D (Eq. C.58) is:
aD ¼ �53:14̂i ¼ 53:14m=s2\180� ðC:58Þ
Figure C.9 shows the acceleration polygon of the mechanism. It
can be noticedthat triangle Dobc of the acceleration polygon is
similar to triangle DO4BC of themechanism. In the acceleration
polygon, the sides of triangle Dobc are not per-pendicular to the
sides of triangle DO4BC like in the velocity polygon. Angle /4(Eq.
C.59) between the sides of both triangles can be calculated as:
/4 ¼ arctanatCanC
¼ arctan atB
anB¼ arctan a
tCB
anCB¼ arctan a4
x24ðC:59Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
389
-
Therefore, triangle Dobc in the polygon is similar to triangle
DO4BC in themechanism and rotated angle /4.
C.6 Raven’s Method
The number of needed vector loop equations depends on the number
of unknowns.In this case, the position unknowns are h3, h4, h5 and
r6. As each vector equationallows solving two unknowns and we have
four, we will need 2 vector equations(Eq. C.60) (Fig. C.10).
r1 þ r4 ¼ r2 þ r3r10 þ r5 þ r6 ¼ r40
)ðC:60Þ
Using the complex exponential form for the vectors, vector
equation (Eq. C.60)can be written as (Eq. C.61):
o
Da
a
b
c
d
AaBa
Ca BAa
CBa
DCa
4φ
4φ
4φ
Fig. C.9 Acceleration polygon
3
4
A
B
2O
4O
C
D5
6
1r
2r 3r
4r
4′r
5r
6r
1′r
2θ1θ
3θ
4θ
5θ
1θ ′6θ
4ϕ
Fig. C.10 Kinematic dia-gram of the mechanism withthe two vector
loop equationsused to solve the problem
390 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
r1eih1 þ r4eih4 ¼ r2eih2 þ r3eih3r10eih10 þ r5eih5 þ r6eih6 ¼
r40eiðh4 þu4Þ
)ðC:61Þ
By separating the real and imaginary parts we obtain a system
(Eq. C.62) withfour equations and four unknowns: h3, h4, h5 and
r6:
r1 cos h1 þ r4 cos h4 ¼ r2 cos h2 þ r3 cos h3r1 sin h1 þ r4 sin
h4 ¼ r2 sin h2 þ r3 sin h3
r10 cos h10 þ r5 cos h5 þ r6 cos h6 ¼ r40 cosðh4 þu4Þr10 sin h10
þ r5 sin h5 þ r6 sin h6 ¼ r40 sinðh4 þu4Þ
9>>>=>>>;
ðC:62Þ
Using Freudenstein’s equation, explained in Appendix B of this
book, the firsttwo equations of the system yields (Eqs. C.63 and
C.64):
h3 ¼ 2
arctan�B�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiB2
� 4AC
p
2AðC:63Þ
h4 ¼ 2 arctan�E
�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiE2 �
4DF
p
2DðC:64Þ
where A, B, C, D, E and F coefficients (Eq. C.65) are:
A ¼ k3 cos h1 � k2 cosðh2 � h1Þþ k1 � cos h2B ¼ 2ðsin h2 � k3
sin h1ÞC ¼ k3 cos h1 � k2 cosðh2 � h1Þþ k1 þ cos h2
9>=>;
D ¼ k3 cos h1 � k5 cosðh2 � h1Þþ k4 þ cos h2E ¼ 2ð� sin h2 þ k3
sin h1ÞF ¼ k3 cos h1 � k5 cosðh2 � h1Þþ k4 � cos h2
9>=>;
ðC:65Þ
And where k1, k2, k3, k4 and k5 geometrical data (Eq. C.66)
are:
k1 ¼ r21 þ r22 þ r23�r24
2r2r3
k2 ¼ r1r3k3 ¼ r1r2k4 ¼ r
21 þ r22 þ r24�r23
2r2r4
k5 ¼ r1r4
9>>>>>>>>>=>>>>>>>>>;
ðC:66Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
391
-
Using Freudenstein’s equation, explained in Appendix B of this
book, the lasttwo equations of the system (Eq. C.62) yields (Eqs.
C.67 and C.68):
h5 ¼ arcsin r40 sinðh4 þu4Þ � r10
r5ðC:67Þ
r6 ¼ r5 cos h5 � r40 cosðh4 þu4Þ ðC:68Þ
Using Eqs. (C.63), (C.64)–(C.67), (C.68), we can plot the
position of the linksrelative to the positions of link 2 along one
full turn. Figure C.11a shows angles h3,h4 and h5 and Fig. C.11b
shows distance r6.
These figures illustrate the benefits of mathematical methods
over graphicalones. The latter would only yield the solution to one
of the points in such curvesand the problem has to be solved again
when there are any changes in the geometricparameters of the
mechanism. Conversely, the expressions in Raven’s method yielda
solution for all the points in the curve and they do not need to be
modifiedwhenever geometrical data are modified.
The solution of the obtained equations for h2 ¼ 350� yield (Eq.
C.69) the fol-lowing values for the position unknowns:
iθ
2θ0°
3θ25°
50°
360°
4θ
5θ
75°
100°
90° 180° 270°
6r
9
8
7
6
5
10
2θ360°90° 180° 270°0°
(a)
(b)
Fig. C.11 a Angular positionof links 3, 4 and 5 in terms ofh2, b
Plot of the linear posi-tion of link 6 versus h2
392 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
h3 ¼ 13:5�h4 ¼ 67:03�h5 ¼ 8:3�r6 ¼ 5:607m
9>>=>>; ðC:69Þ
The position along the horizontal path of link 6 with respect to
the coordinatesystem origin (Eq. C.71) will be given by the
position of point D (Eq. C.70):
r6 ¼ �xDO4 ¼ �xDO2 � xO2O4 ¼ �xDO2 � ð�3:7mÞ ¼ 5:607m ðC:70Þ
So for h2 ¼ 350� the X coordinate of link 6 is:
xDO2 ¼ �1:907m ðC:71Þ
By differentiating with respect to time (Eq. C.61), we obtain
(Eq. C.72):
ir2x2eih2 þ ir3x3eih3 ¼ ir4x4eih4v6eip þ ir5x5eih5 ¼ ir40x4eiðh4
þu4Þ
)ðC:72Þ
We separate the real and imaginary parts in Eq. (C.72), which
yields the equationsystem (Eq. C.73) with four unknowns: x3, x4, x5
and v6:
�r2x2 sin h2 �r3x3 sin h3 ¼ �r4x4 sin h4r2x2 cos h2 þ r3x3 cos
h3 ¼ r4x4 cos h4
�v6 � r5x5 sin h5 ¼ �r40x4 sinðh4 þu4Þr5x5 cos h5 ¼ r40x4 cosðh4
þu4Þ
9>>>=>>>;
ðC:73Þ
From the first two algebraic equations in Eq. (C.73) we can
obtain the expres-sions for x3 (Eq. C.74) and x4 (Eq. C.75):
x3 ¼ r2r3sin h4 � h2ð Þsin h3 � h4ð Þx2 ðC:74Þ
x4 ¼ r2r4sin h3 � h2ð Þsin h3 � h4ð Þx2 ðC:75Þ
Finally, from the third and fourth algebraic equation we reach
expressions for x5(Eq. C.76) and v6 (Eq. C.77):
x5 ¼ r40
r5
cosðh4 þu4Þcos h5
x4 ðC:76Þ
v6 ¼ �r5x5 sin h5 þ r40x4 sinðh4 þu4Þ ðC:77Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
393
-
Using Eqs. (C.74) and (C.75), we can plot the kinematic curve of
the linkvelocity versus the position of link 2. These curves are
shown in Fig. C.12a, b.
Again, equations (Eqs. C.74–C.77) can be particularized for h2 ¼
350� yieldingthe values for the velocity unknowns (Eq. C.78):
x3 ¼ �1:27 rad=sx4 ¼ �0:69 rad=sx5 ¼ �0:09 rad=sv6 ¼
�4:04m=s
9>>>=>>>;
ðC:78Þ
Once more, Eq. (C.72) can be time-differentiated again in order
to find accel-erations (Eq. C.79):
ð�r2x22 þ ir2a2Þeih2 þð�r3x23 þ ir3a3Þeih3 ¼ ð�r4x24 þ
ir4a4Þeih4ð�r5x25 þ ir5a5Þeih5 þ a6eih6 ¼ ð�r40x24 þ ir40a4Þeiðh4
þu4Þ
)ðC:79Þ
By separating real and imaginary parts we reach, once more, a
system (Eq. C.80)with four equations and four unknowns: a3, a4, a5
and a6.
2θ360°90° 180° 270°
iω
−1.5
3ω
−1
0
4ω
5ω
1
1.5
2θ360°90° 180° 270°
6v
−10
−5
0
5
10
0.5
−0.5
(a)
(b)
Fig. C.12 a Angular veloci-ties of links 3, 4 and 5 interms of
h2, b Plot of thelinear velocity of link 6versus h2
394 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
�r2x22 cos h2 � r2a2 sin h2 � r3x23 cos h3 � r3a3 sin h3 ¼
�r4x24 cos h4 � r4a4 sin h4�r2x22 sin h2 þ r2a2 cos h2 � r3x23 sin
h3 þ r3a3 cos h3 ¼ �r4x24 sin h4 þ r4a4 cos h4
�r5x25 cos h5 � r5a5 sin h5þ a6 cos h6 ¼ �r40x24 cos h40 � r40a4
sinðh4 þu4Þ�r5x25 sin h5þ r5a5 cos h5 þ a6 sin h6 ¼ �r40x24 sin h40
þ r40a4 cosðh4þu4Þ
9>>>>=>>>>;
ðC:80Þ
Again, we start by considering the first two algebraic equations
in the system(Eq. C.80), which yield the angular accelerations of
links 3 and 4 (Eq. C.81).
a3 ¼ �r2a2 sin h2 þ r4a4 sin h4 � r2x22 cos h2 � r3x23 cos h3 þ
r4x24 cos h4
r3 sin h3
a4 ¼ �r2a2 sinðh3 � h2Þþ r2x22 cosðh3 � h2Þþ r3x23 � r4x24
sinðh4 � h3Þr4 sinðh4 � h3Þ
9>>=>>;ðC:81Þ
Finally, a6 and a5 (Eq. C.82) are obtained from the last two
algebraic equationsin the system (Eq. C.80):
a5 ¼ r40a4 cosðh4 þu4Þ � r40x24 sinðh4 þu4Þþ r5x25 sin h5
r5 cos h5a6 ¼ r40a4 sinðh4 þu4Þþ r40x24 cosðh4 þu4Þ � r5a5 sin
h5 � r5x25 cos h5
9=;ðC:82Þ
These expressions (Eqs. C.81 and C.82) can be particularized for
h2 ¼ 350�yielding the values for the unknowns (Eq. C.83):
a3 ¼ 1:98 rad=s2a4 ¼ 9 rad=s2a5 ¼ 0:72 rad=s2a6 ¼ 53:14m=s2
9>>=>>; ðC:83Þ
C.7 Mass, Inertia Moments, Inertia Forces and Inertia Pairs
We assume that we know the value of the mass and the moment of
inertia of thelinks. Their values are included in Table C.2.
Figure C.13 shows the center of mass of each link. Their
position (Eq. C.84) isgiven by the following distances:
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
395
-
O2G2 ¼ 0:5mAG3 ¼ 2mBG4 ¼ 0:52m
\O4BG4 ¼ 75:4�DG5 ¼ 3:25m
9>>>>>>>=>>>>>>>;
ðC:84Þ
The acceleration of the center of mass of each link (Eq. C.85)
has been deter-mined by Raven’s Method yielding the following
results:
aG2 ¼ �8:64̂iþ 1:52̂j ¼ 8:78m=s2\170�aG3 ¼ �21:35̂iþ 6:15̂j ¼
22:22m=s2\163:94�aG4 ¼ �25:84̂iþ 4:57̂j ¼ 26:24m=s2\170�aG5 ¼
�53:55̂iþ 2:16̂j ¼ 53:59m=s2\177:69�aG6 ¼ �53:14̂i ¼
53:14m=s2\180�
9>>>>=>>>>;
ðC:85Þ
Once the masses, moments of inertia and accelerations of each
center of masshave been determined, we can calculate the forces
(Eq. C.86) and moments(Eq. C.87) due to inertia:
Table C.2 Mass and moment of inertia of the links
Link 2 3 4 5 6
Mk (kg) 15.31 61.26 154.75 99.54 85
Ik (kg m2) 1.278 81.68 495.76 358.479 –
23
4
A
B
2O
4O
C
6D G=5
6 5G
4G
3G
2G4 4O BG∠
Fig. C.13 Position of thecenters of mass of the links
396 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
FIn2 ¼ 15:31 � 8:78 ¼ 134:42NFIn3 ¼ 61:26 � 22:22 ¼ 1361:2NFIn4
¼ 154:75 � 26:24 ¼ 4060:64NFIn5 ¼ 99:54 � 53:59 ¼ 5334:35NFIn6 ¼ 85
� 53:14 ¼ 4516:9N
9>>>>>>=>>>>>>;
ðC:86Þ
MIn2 ¼ 1;278 � 0 ¼ 0MIn3 ¼ 81:68 � 1:98 ¼ 161:73NmMIn4 ¼ 495:76
� 9 ¼ 4461:84NmMIn5 ¼ 358:48 � 0:72 ¼ 258:1NmMIn6 ¼ 0
9>>>>>>=>>>>>>;
ðC:87Þ
Figure C.14 shows the force and moment that acts on each link
due to inertia.We can see that the force is opposite to the linear
acceleration of the center of massand the moment is opposite to the
angular acceleration of the link.
C.8 Force Analysis. Graphical Method
In order to calculate the torque that is acting on link 2 to
equilibrate themechanism,wewill consider the inertia of the links
as well as the force needed tomove the 80 kg box.We will consider a
friction coefficient of 0.4 and will neglect the inertia force of
thebox. Obviously, in a real problem the inertia of the box would
have to be considered.
3
4
A
B
2O
4O
C
6D G=
5
65G
4G
3G
2G2InF
3InF
4InF
5InF
6InF
6Ga
5Ga
4Ga
3Ga
2Ga
5InM
4InM
3InM
5α
4α
3α
Fig. C.14 Forces and moments due to inertia in the mechanism
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
397
-
So, in this example the force that has to be exerted by link 6
to move the box(Eq. C.88) is:
FR ¼ lN ¼ 0:4ð80 kg � 9:81m=s2Þ ¼ 314:2N ðC:88Þ
We study the forces on the mechanism starting with link 6 (Eq.
C.89).
F56 þF16 þFR ¼ 0 ðC:89Þ
In order to simplify the problem, we will consider that force FR
acts on point D.This will affect the position of reaction force F16
but as force FR is quite smallcompared to Fi6 and the distance from
point D to the base of the piston is also smallcompared to the
mechanism dimensions, the error is very small.
Since the direction of force F56 is unknown, it will be broken
into a vertical andhorizontal component, FV56 and F
H56. We know that the direction of force F16 is
perpendicular to the slider trajectory. So, this force will be
equilibrated by FV56. Thevalue of FH56 (Eq. C.91) can be calculated
by means of the force equilibrium of thehorizontal components of
the forces acting on the link (Eq. C.90) as shown inFig. C.15b.
0 ¼ RFx ¼ FR þFIn6 þFH560 ¼ RFy ¼ F16 þFV56
�ðC:90Þ
FH56 ¼ 4831:14N\180� ðC:91Þ
Figure C.16 shows the free body diagram of link 5. As we already
know, forceFH56 is equal to force F
H65 but with opposite direction.
C
D
5 5G
5InF
5InM65
HF
45F5Inh
65Hh
65VF 65
VhFig. C.16 Free body dia-gram of link 5
6D G=6
6InF
56F
16F
RFRF 6
InF
56HF
(a) (b)Fig. C.15 a Free body dia-gram of link 6, b
horizontalcomponents acting on link 6
398 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
Next, we analyze the moment equilibrium at point C (Eqs.
C.92–C.94) assumingthe direction of FV65 to be upwards:X
j
MCjz ¼ 0 ! hIn5 FIn5 � hV65FV65 þ hH65FH65 �MIn5 ¼ 0 ðC:92Þ
0:6m � 5334:35N� 6:43m � FV65 þ 0:94m � 4831:14N� 258:1Nm ¼ 0
ðC:93Þ
FV56 ¼ 1163:88N\90� ðC:94Þ
Then, F65 will be (Eq. C.95):
F65
¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiFV65�
2 þ FH65� 2
q¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4831:142
þ 1163:882
p¼ 4969:32N
hF65 ¼ arctanFV65FH65
¼ arctan 1163:884831:14
¼ 13:5�
9>>>>>>>>>=>>>>>>>>>;
ðC:95Þ
where distances hIn5 , hV65 and h
H65 (Eq. C.96) are:
hIn5 ¼ G5C sinð360� � hFIn5 þ h5Þ ¼ 3:25 sin 10:65�
hV65 ¼ DC cos h5 ¼ 6:5 cos 8:34�
hH65 ¼ DC sin h5 ¼ 6:5 sin 8:34�
9>>=>>; ðC:96Þ
Back to link 6, we know the vertical forces acting on it, as
FV65 ¼ �FV56 ¼ F16.The equilibrium of forces acting on link 5 (Eq.
C.97) yields the value of force
F45 (Eq. C.98) as shown in Fig. C.17.
FH56 þFV56 þFIn5 þF45 ¼ 0 ðC:97Þ
F45 ¼ 10;207:9N\185:36� ðC:98Þ
Similarly, the equilibrium equations of links 3 and 4 yield the
value of the forcestransmitted by the links.
5InF
65HF
65VF
65F45Fo
Fig. C.17 Polygon of forcesacting on link 5
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
399
-
In link 3, we break force F43 into components FN343 and FN443
(Eq. C.101), with
directions AB and O4B respectively (Fig. C.18). We consider the
equilibrium ofmoments about point A (Eqs. C.99 and C.100) assuming
that FN443 (Eq. C.101) goesupwards. X
j
MAjz ¼ 0 ! �hIn3 FIn3 þ hN443 FN443 �MIn3 ¼ 0 ðC:99Þ
�0:986m � 1361:2Nþ 3:215 � FN443 � 161:73Nm ¼ 0 ðC:100Þ
FN443 ¼ 467:77N ðC:101Þ
Where distances hIn3 and hN443 can be measured on the drawing of
the mechanism
or be determined as (Eq. C.102):
hIn3 ¼ G3A cosð90� þ hFIn3 � h3Þ ¼ 2 cos 60:44�
hN443 ¼ BA sinðh4 � h3Þ ¼ 4 sin 53:5�
)ðC:102Þ
3A
B3G
3InF
3InM
23F
443NF
343NF
3Inh
443Nh
Fig. C.18 Free body dia-gram of link 3
4
B
4O
C
4G4InF
4InM
334NF
54F
14F
4Inh3
34Nh
54h4
34NF
Fig. C.19 Free bodydiagram of link 4
400 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
Figure C.19 shows the free body diagram of link 4. We can
calculate FN343(Eq. C.105) by means of the equilibrium equation of
moments with respect to pointO4 (Eqs. C.103 and C.104). We assume
the direction of FN334 to be oriented to theleft. X
j
MO4jz ¼ 0 ! �hIn4 FIn4 þ hN334 FN334 � h54F54 �MIn4 ¼ 0
ðC:103Þ
0 ¼ �2:923m � 4060:64Nþ 2:412m � FN334� 5:84m � 10;207:9N�
4461:84Nm ðC:104Þ
FN334 ¼ 31;486N ðC:105Þ
where distances hIn4 , hN334 and h54 (Eq. C.106) can be
determined as:
hIn4 ¼ O4B cosð90� þ hFIn4 � h4Þ ¼ 3 cos 13�
h54 ¼ O4C cosð90� þ hF54 � h40 Þ ¼ 6 cos 13:26�hN334 ¼ O4B
sinðh4 � h3Þ
9>=>; ðC:106Þ
The force equilibrium analysis of the forces acting on link 4
(Eq. C.107) yieldsF14 (Eq. C.108). Figure C.20 shows the force
polygon.
F54 þFIn4 þFN434 þFN334 þF14 ¼ 0 ðC:107Þ
F14 ¼ 18;454N\24� ðC:108Þ
Also, the analysis of the force equilibrium of link 3 (Eq.
C.109) yields force F23(Eq. C.110). The force polygon of forces
acting on link 3 is shown in Fig. C.21.
FIn3 þF43 þF23 ¼ 0 ðC:109Þ
F23 ¼ 31;520N\193:5� ðC:110Þ
4InF
334NF
54F
14F4
34NF
o
Fig. C.20 Polygon of forces acting on link 4
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
401
-
Finally, Fig. C.22 shows the equilibrium analysis of link 2,
from which we findthe value of the equilibrating torque (Eq. C.114)
as well as force F12 (Eq. C.112).Since the value of FIn2 is very
small compared to F32, we will neglect it inEq. (C.111).
Therefore:
F32 þF12 ¼ 0 ðC:111Þ
F12 ¼ �F32 ¼ F23 ðC:112Þ
Figure C.22 shows the free body diagram of link 2.Torque M0,
which acts on link 2 to equilibrate the mechanism, can be
obtained
with (Eq. C.113): Xj
MO2jz ¼ 0 ! h32F32 þM0 ¼ 0 ðC:113Þ
M0 ¼ �0:398m � 31;520N ¼ �12;568:6Nm ðC:114Þ
where distance h32 (Eq. C.115) can be calculated as follows:
h32 ¼ O2A sinð360� � hF32 � h2Þ ¼ 1 � sin 23:5� ðC:115Þ
43F
23F
3InFo
Fig. C.21 Polygon of forces acting on link 3
A2O
2G2InF
32F
0M
32h
Fig. C.22 Free body dia-gram of link 2
402 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
C.9 Dynamic Analysis. Matrix Method
We start the dynamic analysis of the mechanism by writing the
equations of theforce and moment equilibrium of each link (Eqs.
C.116–C.20). Figure C.23 showsradius vectors pi, qi and ri used in
the moment equations:
• Link 2:
F32 � F21 ¼ m2aG2p2 ^ F32 � q2 ^ F21 þM0 ¼ IG2a2
)ðC:116Þ
• Link 3:
F43 � F32 ¼ m3aG3p3 ^ F43 � q3 ^ F32 ¼ IG3a3
)ðC:117Þ
• Link 4:
F54 � F43 þF14 ¼ m4aG4p4 ^ F54 � q4 ^ F43 þ r4 ^ F14 ¼ IG4a4
)ðC:118Þ
3
4
A
B
2O
4O
C
6D G=
5
65G
4G
3G
2G
5p5q
2p2q 3q
3p
4p
4q
4r4φ
Fig. C.23 Radius vectorsused in the moment equilib-rium
equations
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
403
-
• Link 5:
F65 � F54 ¼ m5aG5p5 ^ F65 � q5 ^ F54 ¼ IG5a5
)ðC:119Þ
• Link 6:
F16 � F65 þFR ¼ m6aG6 ðC:120Þ
The moment equilibrium equation of link 6 is not necessary as we
suppose theforces are concurrent at point D and a6 ¼ 0.
Equations C.116–C.20 yield a system of 14 algebraic equations
(Eq. C.121) and14 unknowns where F16x ¼ 0 as the direction of force
F16 has to be perpendicular tothe sliding trajectory. So, in this
example it will only have a vertical component.
Projecting each force equation on the X and Y axles and finding
the vectorproducts in the torque equations, we reach the following
system of equations:
F32x � F21x ¼ m2aG2xF32y � F21y ¼ m2aG2y
ðp2xF32y � p2yF32xÞ � ðq2xF21y � q2yF21xÞþM0 ¼ IG2a2F43x � F32x
¼ m3aG3xF43y � F32y ¼ m3aG3y
ðp3xF43y � p3yF43xÞ � ðq3xF32y � q3yF32xÞ ¼ IG3a3F54x � F43x
þF14x ¼ m4aG4xF54y � F43y þF14y ¼ m4aG4y
ðp4xF54y � p4yF54xÞ � ðq4xF43y � q4yF43xÞþ ðr4xF14y � r4yF14xÞ
¼IG4a4F65x � F54x ¼ m5aG5xF65y � F54y ¼ m5aG5y
ðp5xF65y � p5yF65xÞ � ðq5xF54y � q5yF54xÞ ¼ IG5a5F16x � F65x ¼
m6aG6x � FRF16y � F65y ¼ m6aG6y
9>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>;
ðC:121Þ
The system (Eq. C.121) can be written in matrix form (Eq.
C.122):
½L�q ¼ F ðC:122Þ
404 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
where:
½L� ¼
�1 0 1 0 0 0 0 0 0 0 0 0 0 00 �1 0 1 0 0 0 0 0 0 0 0 0 0q2y �q2x
�p2y p2x 0 0 0 0 0 0 0 0 0 10 0 �1 0 1 0 0 0 0 0 0 0 0 00 0 0 �1 0
1 0 0 0 0 0 0 0 00 0 q3y �q3x �p3y p3x 0 0 0 0 0 0 0 00 0 0 0 �1 0
1 0 1 0 0 0 0 00 0 0 0 0 �1 0 1 0 1 0 0 0 00 0 0 0 q4y �q4x �p4y
p4x �r4y r4x 0 0 0 00 0 0 0 0 0 �1 0 0 0 1 0 0 00 0 0 0 0 0 0 �1 0
0 0 1 0 00 0 0 0 0 0 q5y �q5x 0 0 �p5y p5x 0 00 0 0 0 0 0 0 0 0 0
�1 0 0 00 0 0 0 0 0 0 0 0 0 0 �1 1 0
0BBBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCCA
ðC:123Þ
q ¼
F21xF21yF32xF32yF43xF43yF54xF54yF14xF14yF65xF65yF16yM0
0BBBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCCA
ðC:124Þ
F ¼
m2aG2xm2aG2yIG2a2m3aG3xm3aG3yIG3a3m4aG4xm4aG4yIG4a4m5aG5xm5aG5yIG5a5
m6aG6x � FRm6aG6y
0BBBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCCA
ðC:125Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
405
-
The analytical expressions of the radius vectors in matrix ½L�
are defined in Eqs.(C.126)–(C.129). Angles h2, h3, h4, u4 and h5
are the ones defined in Sect. 3.6 forthe analysis with Raven’s
Method. Angle /4 is defined in Fig. C.23.
• Link 2:
p2 ¼ AG2ðcos h2̂iþ sin h2 ĵÞq2 ¼ �O2G2ðcos h2̂iþ sin h2 ĵÞ
�ðC:126Þ
• Link 3:
p3 ¼ BG3ðcos h3̂iþ sin h3 ĵÞq3 ¼ �AG3ðcos h3̂iþ sin h3 ĵÞ
�ðC:127Þ
• Link 4:
p4 ¼ CO4ðcosðh4 þu4Þ̂iþ sinðh4 þu4Þ̂jÞ � O4G4ðcosðh4 þ/4Þ̂iþ
sinðh4 þ/4Þ̂jÞq4 ¼ BO4ðcos h4̂iþ sin h4 ĵÞ � O4G4ðcosðh4 þ/4Þ̂iþ
sinðh4 þ/4Þ̂jÞr4 ¼ �O4G4ðcosðh4 þ/4Þ̂iþ sinðh4 þ/4Þ̂jÞ
9=;
ðC:128Þ
• Link 5:
p5 ¼ �DG5ðcos h5̂iþ sin h5 ĵÞq5 ¼ CG5ðcos h5̂iþ sin h5 ĵÞ
�ðC:129Þ
If we find the values of these vectors (Eqs. C.126–C.129) for h2
¼ 350� weobtain (Eq. C.130):
p2 ¼ 0:4924̂i� 0:0868̂jmq2 ¼ �p2p3 ¼ 1:9447̂iþ 0:4672̂jmq3 ¼
�p3p4 ¼ 0:1692̂iþ 3:1052̂jmq4 ¼ 0:5144̂i� 0:0766̂jmr4 ¼ �0:6598̂i�
2:8373̂jmp5 ¼ �3:2157̂i� 0:4712̂jmq5 ¼ �p5
9>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>;
ðC:130Þ
406 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
The analytical expressions of the acceleration vector of the
center of mass ofeach link (Eqs. C.131–C.34) are:
aG2 ¼ O2G2a2ð� sin h2̂iþ cos h2ĵÞ � O2G2x22ðcos h2̂iþ sin h2
ĵÞ ðC:131Þ
aG3 ¼ O2Aa2ð� sin h2̂iþ cos h2 ĵÞ � O2Ax22ðcos h2̂iþ sin h2
ĵÞþG3Aa3ð� sin h3̂iþ cos h3 ĵÞ � G3Ax23ðcos h3̂iþ sin h3 ĵÞ
ðC:132Þ
aG4 ¼ O4G4a4ð� sinðh4 þ/4Þ̂iþ cosðh4 þ/4Þ̂jÞ� O4G4x24ðcosðh4
þ/4Þ̂iþ sinðh4 þ/4Þ̂jÞ
ðC:133Þ
aG5 ¼ CO4a4ð� sinðh4 þu4Þ̂iþ cosðh4 þu4Þ̂jÞ� CO4x24ðcosðh4
þu4Þ̂iþ sinðh4 þu4Þ̂jÞþG5Ca5ð� sinðh5 þ 180�Þ̂iþ cosðh5 þ 180�Þ̂jÞ�
G5Cx25ðcosðh5 þ 180�Þ̂iþ sinðh5 þ 180�Þ̂jÞ
ðC:134Þ
aG6 ¼ CO4a4ð� sinðh4 þu4Þ̂iþ cosðh4 þu4Þ̂jÞ� CO4x24ðcosðh4
þu4Þ̂iþ sinðh4 þu4Þ̂jÞþDCa5ð� sinðh5 þ 180�Þ̂iþ cosðh5 þ 180�Þ̂jÞ�
DCx25ðcosðh5 þ 180�Þ̂iþ sinðh5 þ 180�Þ̂jÞ
ðC:135Þ
If we find the values of all the elements in the vector F for h2
¼ 350� and solvethe system (Eq. C.122), we obtain the values (Eq.
C.136) for the unknowns(Eq. C.124):
F21 ¼ 32;239̂iþ 7386̂jNF32 ¼ 32;106̂iþ 7409̂jNF14 ¼ 16;636̂iþ
7550̂jNF54 ¼ 10;161̂iþ 944̂jNF65 ¼ 4833̂iþ 1173̂jNF16 ¼ 1173̂jNM0 ¼
�12;872Nm
9>>>>>>>>>>>>>=>>>>>>>>>>>>>;
ðC:136Þ
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
407
-
One of the main advantages of the Matrix Method for the dynamic
analysis whencompared to the graphical method is the ability to
calculate the value of theunknowns along a complete cycle.
With the latter we can only find one solution for one position
of the crank in thecurve and the expressions cannot be used again
if there are any changes in thegeometrical data of the
mechanism.
Figure C.24 shows a curve with the value of the instantaneous
motor torque forthe different positions of the crank, h2. The value
of the motor torque is given byM0and it is the torque that is
necessary to apply to motor link 2 in order to obtain thedesired
speed and acceleration. In this case, x2 ¼ 4:19 rad=s and a2 ¼
0.
2θ360°90° 180° 270°
0M
−10,000
−5,000
0
5,000
10,000
−15,000
−20,000
Fig. C.24 Instantaneousmotor torque M0 versus crankangle h2
2θ360°90° 180° 270°
SF
0
5,000
10,000
15,000
2,500
7,500
12,500
Fig. C.25 Shaking forcecurve versus crank angle h2
408 Appendix C: Kinematic and Dynamic Analysis of a
Mechanism
-
Moreover, we can obtain the curve of the magnitude of the
shaking force versusthe positions of the crank (Fig. C.25). The
shaking force is given by Eq. (C.137):
FS ¼ F21 þF41 þF61 ðC:137Þ
In Fig. C.25 we can see that the maximum value for the shaking
force is at aposition close to h2 ¼ 350�. In this case, this
position coincides with the maximumacceleration of link 6.
Appendix C: Kinematic and Dynamic Analysis of a Mechanism
409
Appendix A Position Kinematic Analysis.Trigonometric
MethodAppendix B Freudenstein’s Method to Solvethe Position
Equations in a Four-BarMechanismAppendix C Kinematic and Dynamic
Analysisof a Mechanism