Embed Size (px)
Citation preview

Application of Fuzzy Logic in Antilock Braking System
*Arshdeep Singh Multani, * Rohit Yadav# Dr. S. Denis Ashok
School Of Mechanical and Building Sciences, VIT University, Vellore-632014, Tamil Nadu, India [email protected] , +91-7845256557
Abstract
ABS is a nonlinear system which senses the wheel locking and releases the brake for the short period
of time and reapplies the brake again when wheel starts to spin. It is very difficult to develop classical
controller for ABS because these systems are really complex in nature. Fuzzy Logic helps in
controlling these kinds of nonlinear systems. In this paper, fuzzy ABS system is designed to adjust
slipping performance by taking into consideration Wheel Acceleration and Wheel Slip. This is done
by means of a fuzzy estimator. The fuzzy control is shown with the help of Matlab. This fuzzy control
system can effectively improve the response of the Automobile ABS and strengthen the vehicle
ability to adapt to various road conditions.
Keywords: Antilock Braking System, Wheel Acceleration, Wheel Slip, Fuzzy Estimator.
Introduction
The main disadvantage of ordinary brakes is that these brakes are imprecise and the vehicle is difficult
to control. Locking of brake can be caused due to the high brake pressure applied. The wheel lockup
causes instability of the vehicle. The aim of an ABS is to decelerate the vehicle in the best possible
manner i.e. to minimize the braking distance while maintaining the stability.
Antilock Braking System
When a vehicle accelerates or brakes, tractive forces are developed by the front and rear tire
respectively, which are proportional to the normal forces acting on the tire. The coefficient of
proportionality, µ is called coefficient of adhesion. The wheel slip S is given by
……………………………………………………………………….. (1)
V (vehicle) is determined with the help of the wheel speed sensor. Each wheel of the vehicle is
equipped with the wheel speed sensor which measures the speed independently and fuzzy estimator
decides which sensor is most reliable. The Vehicle Acceleration is measured by Capacitive
Acceleration Sensor and the velocity of each wheel is measured with help of Inductive Sensors.
1

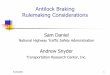
Vehicle velocity estimation is done with the help of the data preprocessing block and the fuzzy
estimator block shown in following figure.
Figure 1 Estimation of Vehicle Velocity
The inputs for the fuzzy estimator are decided by the data preprocessing block which consists of the
lowpass filter which filters the measured signals from the wheel speed sensors. In fuzzy estimator we
decide the rules on which the sensor with the most reliable and accurate data is selected for the
calculation of wheel slip.
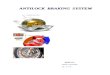
Figure 2 Input Membership function for Sensors
The rule base consists of 48 rules which help to decide the reliable sensor. The reliable speed
calculation can be explained for five situations:
S1= {Very Slow, Slow, Medium, High, Very High}
Following are shown some of the example rules.
If (s1 is very_slow) and (s2 is very_slow) and (s3 is slow) and (s4 is slow) then (output1 is
slow)
If (s1 is medium) and (s2 is slow) and (s3 is slow) and (s4 is slow) then (output1 is slow)
If (s1 is high) and (s2 is medium) and (s3 is medium) and (s4 is medium) then (output1 is
medium)
2

If (s1 is high) and (s2 is high) and (s3 is high) and (s4 is very_high) then (output1 is high)
If (s1 is very_high) and (s2 is very_high) and (s3 is high) and (s4 is very_high) then (output1
is very_high)
The following figure shows the Output Membership function
Figure 3 Output Membership function for Sensors
Figure 3 Rule Viewer (Sensor)
Now, when the speed is obtained, we can determine the wheel slip by using the formula (1) above.
Figure 4 Surface (Sensor)
3

The Fuzzy ABS Algorithm
For the ABS system to work there should be some inputs to the Fuzzy Inference System (FIS) which
again controls the brake actuator and finally the pressure applied. The following flow chart shows the
control of the ABS.
Figure 5 Flow Diagram of the Fuzzy ABS Controller
The fuzzy controller uses two input values
Wheel slip
Wheel acceleration
To fuzzify these input values, we use Mamdani Inference System. Variable Wheel Slip uses six
linguistic values and variable Wheel acceleration uses five different linguistic values.
Slip= {zero, very small, small, optimum, large, very large}
And, acceleration= {very less, less, medium, high, very high}
4
Wheel Slip Wheel Speed
Fuzzy Inference System (FIS)
Vehicle Acceleration
Brake Actuator
Pressure
Wheel Acceleration
Feed
back

Figure 6 Input Membership function for Wheel Slip
Figure 7 Input Membership function for Wheel Acceleration
The rule base consists of thirty rules and all the thirty conditioned are allowed. These rules create non-
linear characteristics surface as shown below.
Figure 8 Fuzzy Characteristic Surface
Using this characteristic surface, the two fuzzy input values slip and acceleration can be mapped to
the fuzzy output value pressure. The labels for this value are:
Pressure= {very less, less, optimum, high, very high}
The optimal value is obtained by defuzzifying the linguistic variable pressure. The defuzzification
process is done by Centre of Gravity method.
5

Conclusion
In this paper the application of fuzzy logic in Antilock Braking System was presented. The control
algorithm for the Fuzzy ABS System consists of a non-linear characteristic surface, which was created
using Fuzzy Logic. The advantage of fuzzy logic in these kinds of systems is the ability to modify
parts of this characteristic surface easily; just the linguistic rules and variables need to be varied. The
major disadvantage is that when we change the membership type the output also varies which is not
desired.
References
George F. Mauer. (1995). A Fuzzy Logic Controller for an ABS Braking System, IEEE Transaction
on Fuzzy System, Vol.3, No.4, pp.381-387.
Roozbeh Keshmiri and Alireza Mohamad Shahri. (2007). Intelligent ABS Fuzzy Controller for
Diverse Road Surfaces, World Academy of Science, Engineering and Technology 29, pp.292-297.
Li Fa-zong, Hu Ru-fu, Yao Huan-xin. (2010). The Performance of Automobile Antilock Braking
System Based on Fuzzy Robust Control, International Conference on Intelligent Computation
Technology and Automation. pp. 870-873.
Timothy J.Ross (1995), Fuzzy Logic with Engineering Applications (Ed.) McGraw Hill Publications
pp. 90-98, pp. 476-480.
(*1st year M.Tech, Mechatronics, VIT University, Vellore, Tamil Nadu, India)
(# Under the guidance of Associate Professor, Mechatronics Division, SMBS, VIT)
6