Embed Size (px)
Citation preview
![Page 1: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/1.jpg)
Applied Acoustics 150 (2019) 27–35
Contents lists available at ScienceDirect
Applied Acoustics
journal homepage: www.elsevier .com/locate /apacoust
Vibro-acoustic design, manufacturing and characterization of atonpilz-type transducer
https://doi.org/10.1016/j.apacoust.2019.02.0030003-682X/� 2019 Elsevier Ltd. All rights reserved.
⇑ Corresponding author.E-mail address: [email protected] (P. Kurt).
Polat Kurt a,⇑, Murat S�ansal b, _Istek Tatar b, Cihangir Duran c, Sadettin Orhan a
aDepartment of Mechanical Engineering, Ankara Yıldırım Beyazıt University, Etlik-Keçiören, Ankara, TurkeybMeteksan Savunma (Defense Industry) Sanayii A.S�., Cyberpark F Blok Bilkent-Çankaya, Ankara, TurkeycDepartment of Metallurgical and Materials Engineering, Ankara Yıldırım Beyazıt University, Etlik-Keçiören, Ankara, Turkey
a r t i c l e i n f o
Article history:Received 11 April 2018Received in revised form 16 December 2018Accepted 3 February 2019
Keywords:Tonpilz-type transducerUnderwater acousticsCharacterizationDesignManufacturing
a b s t r a c t
Tonpilz-type transducers are highly important for sonar systems to generate and receive sound waves.They are generally used for low frequency applications. This study covers designing, manufacturingand characterization of Tonpilz-type transducers which is intended to operate below 7 kHz in hullmounted sonar systems. Transducers are first designed using simple lumped parameter, equivalent cir-cuit and finite element methods according to the acoustic specifications obtained from original proto-types. Two transducers are then specified by considering the predefined specifications and finallymanufactured. The T1 and T2 transducers both have an operating frequency of 4.9 kHz with a mechanicalquality factor of 3.5. Maximum TVR levels are 133.7 dB//1 lPa/V for the T1 and 137.3 dB//1 lPa/V for theT2. Maximum RVS values are �159.1 dB//1 V/lPa at 4.9 kHz for the T1 and �156.8 dB//1 V/lPa at 5 kHzfor the T2. According to the accuracy of the results, FEM was the best one among the design methods.Acoustic parameters are highly satisfied for the T2 transducer when compared to the original prototypesuch that the operating frequency (f p) is 30% lower, the TVR values are almost the same and the RVS is3.2 dB//1 V/lPa higher. These results suggest that designed transducers can be successfully used in thecurrently-utilized hull mounted sonar systems due to their comparable acoustic parameters attainedat much lower operating frequencies.
� 2019 Elsevier Ltd. All rights reserved.
1. Introduction
Sonar is used to define underwater acoustic technologies suchas communication, detection and navigation in water. Sonar is sep-arated into two types as active and passive sonar. Active sonar bothemits sound waves and listens to them while passive sonar onlylistens to sound waves generated by other objects. In both systems,transducers are used for transmitting and receiving purposes.Among several types of transducers, Tonpilz transducers are themost common type which are used in low-frequency applications[1].
Underwater transducers have been an important research areafor a long time. Because transducer design is a complex process,there have been many methods introduced in literature. The sim-plest modelling technique is the simple lumped parameter method(SLPM). In this method, the transducer is modelled as single degreeof freedom spring mass system and the resonance frequency of thetransducer can easily be calculated. The accuracy is not good, but it
can be applied as an initial design step before applying moreadvanced ones [2].
Equivalent circuit method (ECM), first derived by Mason in1938 [3], is another modelling method which combines electricaland mechanical parts of the transducer in one circuit. Based on thismodel, various ECM have been introduced in literature. Krimholtzet al. [4] presented alternative equivalent circuits with someadvantages on particular types of piezoelectric transducers.
Several studies regarding Tonpilz transducers are available inliterature. Miyama et al. [5] performed equivalent circuit analysiswith multiple acoustic matching plates. Transmitting voltageresponse (TVR) and receiving voltage sensitivity (RVS) results cal-culated by ECM were compared to the experimental measure-ments and very good matching was obtained. On the other hand,the studies at improving the performance parameters are muchin number in the recent years. Xiping and Jing [6] studied a Tonpilztransducer with a hole in its head mass to obtain a wider band-width. Kim and Roh [7] also applied a void head mass to widenbandwidth by using regression analysis and generic algorithm.Kai and De-shi [8] used a generic algorithm to optimize the struc-ture of the transducer. They calculated better sound radiation
![Page 2: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/2.jpg)
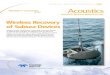
Fig. 1. Single Degree of Freedom (SDOF) mass-spring system [1,2].
28 P. Kurt et al. / Applied Acoustics 150 (2019) 27–35
power after optimization process. On the other hand, Butler [9]widened TVR bandwidth by designing two different mechanicalstructures to develop multi-resonant transducers. The flexural res-onance is generally known as an undesired mode causing nullresponse but Hawkins and Gough [10] used it to widen the band-width by lip-mounting. Saijou and Okuyama [11] optimized thephase difference of Tonpilz transducers with a bending disk towiden bandwidth.
Non-linear goal programming algorithm was implemented byCombrugge and Thompson Jr. [12]. They introduced a systematicprocedure instead of trial-and-error methods based on ECM. Theystated that this procedure facilitated to design wide band and highacoustic power transducers. Optimization by using ECM were notsufficient but using finite element method (FEM) revealed moreaccurate results. Teng et al. [13] made comparison between ECMand FEM. Smith [14] discussed ECM and the boundary elementmethod. The design methods for transducers were clearly definedand compared to each other by Çepni [2] and Çiçek [15]. Çepni alsobuilt a design methodology starting from SLPM and end with theexperimental measurement to avoid wasting time while designingtransducers.
Low-medium frequency transducers have been commonly usedin many countries’ frigates and ships. This study offers a newdesign and manufacturing of a Tonpilz-type transducer whichoperates below the operating frequency of those transducers withsatisfying acoustic parameters as well as keeping the same outerdimensions. In other words, new designs can easily be replacedwith the currently-used ones at the original hull structures butoperated at lower frequencies to detect sound much further dis-tances. Three design methods (e.g., SLPM, ECM, FEM) are used indesign methodology and then the results are compared with bothexperimental and original transducer’s results. There are so manystudies using design methods in literature but there is a lack ofinformation considering all methods together in order to find opti-mum transducer parameters according to predetermined designcriteria and limitations, and finally compare them with the in-water acoustic measurement results.
2. Methodology
Transducer design started with defining the design criteria andinitial parameters. There was limited information about low-medium frequency transducer (hereafter referred to as OriginalPrototype or OP) used at hull mounted sonar system, and availableinformation was given for transducers with matching circuits andin array configuration. Therefore, in order to obtain acousticparameters without matching circuits, two OP transducers werefabricated and analyzed first in order to define the design criteriaand initial parameters. Then, SLPM was used to define roughdimensions and then optimization on head and tail masses weremade by using ECM. In the last step, FEM was used to give finalshape by optimizing dimensions and numbers of piezoceramics.Finally, acoustic performances of the fabricated transducers (bothdesigned in this study and OP ones) were measured in water andall results were evaluated to figure out the best design methodand the fabricated transducer.
2.1. Design criteria
Tonpilz-type transducers are generally used to obtain highacoustic power at relatively low frequencies. The transducer isdesired to be as small as possible but reducing dimensions gener-ally increase resonance frequencies. Therefore, optimization is cru-cial to find the optimum operating frequency within the limiteddimensions. The design criteria were specified based on the OP
transducers. The main physical dimensions were fixed to fit intoplatforms currently used for the OP transducers (e.g., form-fit-function). Therefore, active surface area of the head mass was fixedto 100� 100 mm2 including 2 mm rubber coating and the maxi-mum height of the tonpilz section was adjusted to 120 mm. Thetotal height of the transducer including outer cylindirical housingwithout cable was fixed to 195 mm as in the OP. Then, accordingto the measured acoustic parameters of the OP (operating fre-quency of �7 kHz, TVR of 138 dB//1 lPa/V, RVS of �160 dB//1 V/lPa), some main acoustic parameters were defined as startingpoints and goals such as operating frequency <7 kHz,RVS = �160 ± 3 dB//1 V/lPa and a TVR = 138 ± 3 dB//1 lPa/V.Mechanical quality (Qm) factor was set to �4 for a sufficient band-width for TVR. In design and fabrication of all transducers, thesame materials such as aluminum for head mass, steel for tail massand stress rod, and PZT-4 (Navy Type I) for piezoceramics wereused. Note that all transducers analyzed and fabricated did nothave matching circuits.
2.2. Obtaining rough dimensions by using simple lumped parametermethod
SLPM introduced by Sherman [1] is based on representingtransducer by one degree of freedom spring-mass system as shownin Fig. 1. This model is used generally as a starting point of thedesign processes to have an idea before using the advanced mod-elling techniques. Here, head and tail masses are represented asequivalent mass, piezoceramics as spring. It is assumed that massis ideal rigid mass and spring has only stiffness. The other parts oftransducer are neglected in this model. In Fig. 1, the term Me isanalogous to effective mass of head and tail masses, the term Kcs
is analogous to the stiffness of piezoceramic stack, and the force,F, to driving voltage and x is position of the mass.
For a single degree of freedom system, the equation of motioncan be written as:
Med2xdt2
þ Redxdt
þ Kcsx ¼ F ð1Þ
Re is effective resistance and represents the radiation terms ofthe medium. The effective mass and resistance, Me and Re can beexpressed as follows [1]:
Me ¼ MhMt
Mh þMtð2Þ
Re ffi Rr
1þ MhMt
� �2 ð3Þ
where Mh is mass of head mass,Mt is mass of tail mass and Rr isradiation resistance of the medium. From the equation of motion,the natural and angular natural frequencies can be determined asfollows;
![Page 3: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/3.jpg)
P. Kurt et al. / Applied Acoustics 150 (2019) 27–35 29
xn ¼ffiffiffiffiffiffiffiKcs
Me
sð4Þ
f n ¼ 12p
ffiffiffiffiffiffiffiKcs
Me
sð5Þ
In order to ease the calculations, flexural frequency was used asthe initial step. It is usually requested to be much higher than theresonance frequency of the transducer because it causes sharpdecrease in TVR. It was chosen to be 15 kHz which was more thanthe double of requested operating frequency and for square sur-faces it was calculated by [1]:
f flex ¼1:12cth
a2 1� v2ð Þ1=2ð6Þ
where v is Poisson’s ratio, th is thickness of the head mass, c is thesound speed in the material assigned to head mass and a is sidelength of surface. Thickness of the head mass, th was calculated as18 mm, based on predetermined 96� 96 mm2 dimensions. Then,mass of the head mass was calculated as 0.46 kg. A practical valueof tail to head mass ratio is described in literature and recom-mended to be taken as 4 [1]. By using this ratio, mass of tail masswas calculated as 1.84 kg.
From Eq. (2), effective mass was calculated as 0.37 kg. Whennatural frequency was taken as 7 kHz, effective stiffness was foundto be Kcs ¼ 0:7� 109N=m from Eq. (4) and Eq. (5). The area ofpiezoceramics was taken as Apc ¼ 6:4� 10�4m2. Then leghth ofpiezoceramic stack was found lcs ¼60 mm by using area and den-sity of piezoceramics. Considering the design criteria and overalllength of the tonpilz as 120 mm, length of tail mass was assumedto be lt ¼ 120� lcs � th ¼ 42mm. Area of tail mass was calculatedas At ¼ 5:56� 10�3m2 by its mass, density and length. Consideringthe area, outer and inner diameters of the tail mass were selectedas 85 mm and 12 mm. Stress rod was omitted in this method, butits dimensions were calculated by using design limitations anddimensions of other parts. The maximum diameter of the stressrod was inner diameter of tail mass; therefore, it was chosen asdsr ¼ 12 mm. The length of the stress rod was selected aslsr ¼ 110 mm by considering physical limitations and dimensions
Fig. 2. Section view of a Tonpilz transduce
of the other parts. The rough dimensions calculated in this stepis seen in Fig. 2. The calculated dimensions in this step were roughdimensions and some of the parts were omitted. Therefore, it wasnot important to find an actual design of the transducer for thisstep because the main purpose was to specify initial parametersto be used in equivalent circuit method.
2.3. Equivalent circuit method (ECM)
This method uses electrical circuits to define the transducer.After rough dimensions were obtained by SLPM, the transducerwas modeled by using ECM. The electrical circuit representationof the designed transducer is shown in Fig. 3.
Kcs and Ksr represent the stiffnesses of the piezoceramic stackand stress rod, respectively. Rrand Mr are radiation resistanceand radiation mass of the medium. Parameters obtained in the firststep were used directly in this step. The tail mass (Mt), head mass(Mh) and stiffness of the piezoceramics (Kcs) were already knownfrom SLPM. Clamped capacitance, stiffness of the stress rod, radia-tion mass and radiation resistance and mass of piezoceramic stackðMcsÞ were to be calculated. Clamped capacitance was found byusing the equation below [1]:
C0 ¼ npceT33Apc
tpc1� k233� �
¼ 2:38nF ð7Þ
In this equation, Apc is the cross-sectional area of the piezoce-
ramics (6:4� 10�4m2). The number of piezoceramics in thestack,npc was chosen to be 6 which resulted in 10 mm thickness(tpc) for each ceramic. Mass of piezoceramic stack was calculatedby known density and volume of the piezoceramics as 0.29 kg.
Stiffness of the stress rod was calculated from dimensions of itand mechanical properties of steel as 0:22� 109N=m. Radiationterms, Rrand Mr for rectangular active surfaces were calculatedwith respect to frequency using the equations given in [16] and[17].
The transformation ratio can be calculated as follows [1]:
N ¼ d33Apc
sE33tpc¼
289x10�12 CN
� �6:41x10�4m2� �
15:5x10�12 m2
N
� �0:01mð Þ
¼ 1:2 ð8Þ
r with parameters obtained in SLPM.
![Page 4: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/4.jpg)
Fig. 3. Equivalent circuit of the transducer.
30 P. Kurt et al. / Applied Acoustics 150 (2019) 27–35
When 1 Volt alternating voltage was applied to the electricalcircuit shown in Fig. 3, the current passing through Mh referredto the velocity of the active surface. After this current was calcu-lated by analyzing the circuit, one could obtain the pressure inthe far-field distance by using equation below [18]:
P rð Þj j ¼ qckuab2pr
ð9Þ
where q is the density of the medium, c is the sound speed in themedium, k is the wave number, u is the velocity of the active sur-face, a and b are the side lengths of the active surface and r is thefar-field distance. After far field pressure was calculated, transmit-ting voltage response (TVR) and receiving voltage sensitivity (RVS)were calculated as follows [1]:
TVR ¼ 10 logP2rms
P2ref
!¼ 20 log
Prms
Pref
� �ð10Þ
Fig. 4. Cross sectional view of the transducer obtained in ECM.
RVS ¼ TVRþ 20 log Zj j � 20 log fð Þ � 294 dB ð11Þwhere Prms is root mean square pressure obtained in the far field, Pref
is the reference pressure which is 1 lPa for water and Z is electricalimpedance of the transducer.
In Fig. 3, passive elements such as glue, electrodes and isolatorsbetween piezoceramics were not included for simplicity. Theywere needed to be added to the circuit as capacitances in parallelto the capacitance of piezoceramics. After they were added, thetotal capacitance of piezoceramic stack can be calculated asfollows:
Ccs ¼ 1Kcs
þ 1Kg
þ 1Kel
þ 1Kis
ð12Þ
where Kg , Kel, Kis are stiffnesses of glue, electrodes and isolators,respectively. Finally, two electrical circuits excluding and includingthese passive elements (glue, electrodes and isolators) were mod-elled and called as basic ECM and improved ECM, respectively.
The analysis was run at different values of tail (1.84, 1.4 and1 kg) and head (0.36–0.86 by 0.1 kg increment) masses and theoptimum results were found at; Mt ¼ 1.84 kg and Mh ¼ 0.46 kg.These range of values were used because they were maximumand minimum masses that be obtained in limited dimensions. Bythese values, the natural frequency was found at 5.8 kHz and qual-ity factor was found as 4. Finally, the dimensions of the main partswere determined according to the calculated parameters. Thecross-sectional view of the transducer for the values obtained inthe second step can be visualized in Fig. 4.
2.4. Finite element method (FEM)
FEM was used to compare the results and to improve theparameters by changing the dimensions and numbers of piezoce-ramics. First, transducer was constructed by using a CAD pro-gramme. Second, the main transducer parts such as head, tail,piezoceramics, stress rod and nut were modeled. The glue andelectrodes between ceramics were skipped in this model.
After a 3D model was obtained, COMSOL Multyphysics 5.2a wasused for further analysis. The physics interfaces; pressure acous-tics, electrostatics and solid mechanics, were selected. The studytype was selected as frequency domain because the transducercharacteristics needed to be determined with respect to the fre-quency. Transducer model was transferred to COMSOL, and then,water and a perfectly matched layer (PML) domains were definedin front of the active surface. The materials for each part and forthe domain were assigned. After piezoelectric polarization wasdefined in +Z direction (i.e., thickness polarization direction), 1Vrms was applied to the positive surfaces and the other surfaceswere grounded.
The analysis was run in a range of frequency from 3 kHz to13 kHz with a step size of 0.1 kHz. The analysis was performedfor 6 and 8 piezoceramics and in a range of 19–24 mm for innerradius (rpci ) and 22–27 mm for outer radius (rpco ), respectively.TVR andmechanical quality factor (Qm) of the transducer for differ-ent size and number of piezoceramics were calculated. Two trans-ducers were selected as optimum among 26 trials with acousticperformances within the limits of the design criteria. Table 1
![Page 5: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/5.jpg)
Table 1Parameters of the transducers selected for manufacturing process.
No rpco ðmmÞ rpci ðmmÞ tpc ðmmÞ npc f p ðkHzÞ TVR ðdBÞ f p�RVS ðkHzÞ RVSðdBÞ Qm
T1 24 20 10 6 5.4 136.5 6.3 �153.8 3.6T2 25.4 22 8 8 5.2 138.5 6.1 �154.9 4.0
P. Kurt et al. / Applied Acoustics 150 (2019) 27–35 31
shows the physical dimensions and parameters of the two selectedtransducers (T1 and T2) in this step. Here, f p is operating frequencywhere TVR peaks, f p�RVS is the frequency where RVS peaks.
2.5. Manufacturing and characterization of transducers
Transducers were analyzed with some assumptions and simpli-fications. Glue, electrodes and isolaters between ceramics andmetal parts were omitted in the design methods but had to be con-sidered for the real transducers. The housing metal protectingtransducer parts from environmental effects and the rubber coat-ing on head mass and housing were to be considered as well. Neo-prene rubber was particularly applied to increase insulationresistance of the whole transducer against water.
Fig. 5 shows the steps followed in the fabrication steps. Fig. 5(a)shows the aluminum head masses covered by rubber and assem-bled stress rods. Piezoceramics were stacked in electrically parallelusing a conductive epoxy glue. A 50 lm thick Cu-Be electrode wasplaced between two piezoceramics and they were glued together.A master was designed to align ceramics on top of each other inthe stack. Two glass fiber reinforced epoxy insulators were usedbetween piezoceramic stack and head and tail masses for electricalinsulation.
The stacks were kept at 60 �C for 1 h to cure the glue and thenremoved from the master (Fig. 5(b)). After cabling, they were cov-ered by outside epoxy-glass fiber cloth and inside polyurethanepotting as shown in Fig. 5(c) to keep the alignment of the stacks
Fig. 5. (a) Head masses covered by neoprene rubber and stress rods assembled, (b) Piezocparts after electrical and mechanical parts assembled, (e) Finished transducer.
in case of cracking during working as well as to prevent electricalshort-cut in case of contact with water. Piezoceramic stacks wereplaced between head and tail masses and squeezed by stress rodstightened at 50 Nm torque. A non-conductive epoxy-glue wasapplied to the contact surfaces between metal parts and stacksbefore squeezing the rods. Fig. 5(d) shows the tonpilz parts assem-bled. Transducers were encapsulated by neoprene-coatedcylindirical housings together with a tail cable. They were all-glued together with a rubber-based glue and then kept at 60 �Cfor 1 h to fully cure and seal the transducers. The finished trans-ducer ready for acoustic measurements is shown in Fig. 5(e). Inaddition, two OP transducers were also fabricated in the sameway. Note that T1, T2, and OP transducers were produced withoutmatching electronic circuits to make clear comparison betweentheoretical and practical results.
The measurements of the transducers were performed in theacoustic test pool 6 m in length, 4 m in width and 4 m in depth.In the pool, there was a positioning system to precisely locatethe transducers. Secondary methods [19] were used to calculatethe acoustic performance. A reference transducer was locatedexactly in front of the transducer at a distance of 2 m in depthand 2 m from the top surface of the pool. In the TVR measure-ments, the sound generated by the transducer under alternatingvoltage was measured by a reference transducer. On the contraryto the TVR measurements, the reference transducer was used asprojector and the fabricated transducers were used as hydro-phones in the RVS measurements.
eramic stacks (c) covered by outside glass fiber and inside polyurethane, (d) Tonpilz
![Page 6: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/6.jpg)
32 P. Kurt et al. / Applied Acoustics 150 (2019) 27–35
3. Results and discussion
Two transducers, namely T1 and T2, were designed by SLPM,ECM and FEM methods consequtively according to design criteriaspecified in advance. Then, the transducers were manufacturedand tested. Acoustic performance parameters of the transducersobtained from the design methods and experimental results werecompared to each other and the relative deviations for each onewas determined. In addition, acoustic results of the two OP trans-ducers were also completed whether the pre-determined criteriawere achieved or not in real conditions. All results were thendiscussed.
3.1. Conductance
Conductance results were compared in Fig. 6. Conductancereveals the resonance frequeny of the transducers. Because theoperating frequency is usually close to the resonance frequency,conductance is used as the first step before measuring TVR andRVS. Resonance frequencies (f r) of the transducers were mea-sured at 4.6 and 4.9 kHz for the T1 and T2, respectively. Theywere well below 7 kHz which was one of the predetermineddesign criteria. The peak conductance values depend on the
Fig. 6. Comparison of the conductance results for transducers (a) T1 and (b) T2.
dimensions and number of piezoceramics. The most closelymatching results were calculated by FEM whose details will beexplained later. It should be stated that first modes of the trans-ducers are calculated by all design methods, but the secondmode is not seen in ECM. In the OP transducers, two modeswere observed similar to the T1 and T2 results. This situationwill also be discussed later.
3.2. Transmitting voltage response (TVR)
TVR results were compared in Fig. 7. TVR was one of themost important design criteria in this study because the operat-ing frequencies and the mechanical quality factors were deter-mined with respect to the TVR results. Operating frequencieswere measured as 4.9 kHz for both transducers with a mechan-ical quality factor of 3.5. The operating frequencies calculatedwith design methods matched to great extent with the experi-mental measurements. Maximum TVR values and the values atother frequencies calculated by design methods and experimen-tal results well-matched to each other as well. Maximum TVR(e.i., at the operating frequency) was measured as133.7 dB//1 lPa/V for the T1 and 137.3 dB//1 lPa/V for the T2tranducers.
Fig. 7. Comparison of the TVR results for transducers (a) T1 and (b) T2.
![Page 7: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/7.jpg)
Fig. 8. Comparison of the RVS results for transducers (a) T1 and (b) T2.
P. Kurt et al. / Applied Acoustics 150 (2019) 27–35 33
3.3. Receiving voltage sensitivity (RVS)
RVS results were compared in Fig. 8. RVS is an indicator of thetransducer receiving sensitivity. Transducers are also required toreceive sound. RVS better than �160 dB//1 V/lPa is sufficient formost transducer applications and that level was achieved atrespective peak frequencies (e.g., �159.1 dB//1 V/lPa for the T1and �156.8 dB//1 V/lPa for the T2).
It should be mentioned that the peak frequencies in the TVR(Fig. 7) and RVS (Fig. 8) plots are nearly the same in the measure-ments while, in the design methods, they are higher for the RVSresults. In the design methods, RVS was calculated by reciprocityformula (Eq. (11)) after TVR was measured. In the actual measure-ments, however, RVS was directly calculated by using it as a hydro-phone. The same situation was also observed by Miyama et al. [5].They studied a Tonpilz transducer and calculated TVR and RVS byECM and compared them to the actual measurements. Theyobserved approximately %11 deviation between them.
The other important detail is a sharp decrease after the peakfrequency is exceeded in the RVS results (Fig. 8) as compared tothe TVR results (Fig. 7). The effect of second mode at nearly12.4 kHz was not clearly observed in the RVS plots while it broad-ened the bandwidth in the TVR plots. The same effect was alsoobserved in literature [20]. In order to detail possible reasons forthis situation, the first and second modes of the transducers were
investigated. The displacement responses of the transducers at firstand second resonance frequencies are shown in Fig. 9. The firstmode was a piston mode where the transducer parts moving for-ward and backward together in the polarization direction. In thesecond mode, corners of the head mass moved in opposite direc-tion to the centre, as inside and outside. This is the flexural modeof the head mass which in general adversely affects transducer per-formance. However, there are some reports [10] using the flexuralmode to broaden TVR bandwidth, as is the case in our study. How-ever, this is not the case in RVS.
Moreover, the head mass and all the other parts were modeledin ECM by their physical properties such as stiffness and mass.Their shapes and dimensions could not be modeled in these meth-ods. Therefore, velocity of the head mass was assumed to be uni-form in ECM. As a result, the second (flexural) mode could not beobserved in basic ECM and improved ECM models.
There were some simplifications and assumptions made in thedesign methods which are possibly the reasons for the deviationsbetween calculated and measured values. While designing a trans-ducer, the transducer parts are always presumed to be uniformlyconnected to each other, which in fact is not totally possible inpractice. In addition, in-water measurement environment wasassumed to be ideal in the design methods, but it is not possiblein the real measurement conditions (e.g., turbidity, temperaturegradient, salinity, etc). More importantly, prestress induced intransducer due to tightening torque by means of a stress boltwas also not modeled in the design methods. The torque createsa compression on the ceramics which adjusts the natural fre-quency and resulting acoustic performances. In FEM, passive partssuch as electrodes, glue and isolators were not modeled. The con-straints of the design methods and comparison to the measure-ments can be seen in Table 2. Rubber and prestress areparticularly important because none of the models are able toincorporate them to the analysis.
Table 3 shows the relative deviations of the design methodswhen compared to the actual measurement results of the T1 andT2 transducers. Relative deviations given in Table 3 are referencedto the measurement results of the transducers T1 and T2. The OPresults are given to compare actual acoustic measurements. Theaccuracy can be improved in the models by incorporating skippedparts such as glue, electrodes, prestress level, isolators or neoprenerubber coating. On the other hand, in order to get more accurateresults in the RVS calculation, rather than using a reciprocity for-mula, transducer can be analyzed as hydrophone to directly mea-sure RVS. Also, if the prestress occurred in the stress rod ismodeled in FEM, the deviations would decrease to quite smalllevels. In ECM, there are more simplifications because of the natureof the method. Nevertheless, this method can also be improved bymodeling neoprene rubber or prestress somehow in the circuit,which may reduce the relative deviations in ECM. Among thedesign methods used in this study, FEM is the best one to designa transducer based on minimum relative deviations, similar tothe results reported in literature [2,13]. Although both the T1and T2 transducers successfully satisfy the predetermined param-eters (e.g., operating frequency <7 kHz, Qm � 4,RVS = �160 ± 3 dB//1 V/lPa and a TVR = 138 ± 3 dB//1 lPa/V), theT2 transducer matched to the design methods with better accuracyand reached to much higher TVR and RVS values than the T1 trans-ducer. The acoustic parameters were highly satisfied for the T2transducers when compared to the OP such that the operating fre-quency (f p) was 30% lower, the TVR values were almost the same,and particularly the RVS was 3.2 dB//1 V/lPa higher. Therefore, itcan be used instead of the OP in underwater applications due toits comparable acoustic parameters obtained at much lower oper-ating frequencies.
![Page 8: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/8.jpg)
Fig. 9. (a) First mode (5.4 kHz) and (b) second mode (12.4 kHz) (flexural mode) of the transducer T1 modeled by FEM.
Table 2Comparison of the model constraints and the actual measurements.
ECM (Basic) ECM (Improved) FEM Measurement
Main parts (Head, tail, stress rod,piezoceramics)
Yes Yes Yes Yes
Passive parts (Glue, electrodes, isolators) No Yes No YesNeoprene rubber No No No YesWater Yes Yes Yes Yes3-D modelling of parts No No Yes NAUniform velocity assumption for head mass Yes Yes No NoPrestress occurred in stress rod No No No YesRVS calculation From TVR (By reciprocity
formula)From TVR (By reciprocityformula)
From TVR (By reciprocityformula)
Directlymeasured
34 P. Kurt et al. / Applied Acoustics 150 (2019) 27–35
4. Conclusions
Low-medium frequency Tonpilz-type transducers are highlyimportant for underwater sonar technologies to generate andreceive sound waves. This study covers designing, manufacturingand characterization of Tonpilz-type transducers which is intendedto be used in currently-utilized hull mounted sonar systems.
Predetermined acoustic parameters were obtained from originalprototype transducer mesurements such that operatingfrequency was lower than 7 kHz, transmitting voltage responsewas 138 ± 3 dB//1 lPa/V, receiving voltage sensitivity was�160 ± 3 dB//1 V/lPa, and mechanical quality factor was �4. Afterdefining the design criteria, rough transducer dimensions weredetermined by using Simple Lumped Parameter Method (SLPM).
![Page 9: Applied Acoustics - Meteksan Savunmacan be applied as an initial design step before applying more advanced ones [2]. Equivalent circuit method (ECM), first derived by Mason in 1938](https://reader033.pdfslide.net/reader033/viewer/2022060519/604d5967913155696c0f34fe/html5/thumbnails/9.jpg)
Table 3Parameters calculated by using design methods and their relative deviations (%) with respect to the measurement results of T1 and T2. The OP results are given for comparison.
T1 OP
ECM (Basic) ECM (Improved) FEM Measurement Measurement
fr[kHz] 6.1 (41%) 5.5 (20%) 5.4 (17%) 4.6 6.6–6.8fp[kHz] 6.1 (24%) 5.5 (12%) 5.4 (10%) 4.9 7fp�RVS[kHz] 7.1 (45%) 6.6 (34%) 6.3 (28%) 4.9 7–7.2Qm 3.8 (8.5%) 5 (42%) 3.6 (2.8%) 3.5 2.3–2.7Max TVR [dB//1 lPa/V] 136.8 (3.6%) 136.7 (3.6%) 136.5 (3.4%) 133.7 138–138.3Max RVS [dB//1 V/lPa] �161.6 (1.5%) �160.8 (1%) �153.8 (3.35) �159.1 �160.4 to �160
T2
fr[kHz] 5.7 (16%) 5.2 (6%) 5.2 (6%) 4.9 6.6–6.8fp[kHz] 5.7 (16%) 5.2 (6%) 5.2 (6%) 4.9 7fp�RVS[kHz] 6.6 (32%) 6 (20%) 6.1 (22%) 5 7–7.2Qm 4 (14%) 4.7 (34%) 4 (14%) 3.5 2.3–2.7Max TVR [dB//1lPa/V] 137.2 (0.07%) 137.7 (0.2%) 138.6 (0.9%) 137.3 138–138.3Max RVS [dB//1 V/lPa] �163.2 (4%) �162.2 (3.4%) �154.9 (1.2%) �156.8 �160.4 to �160
P. Kurt et al. / Applied Acoustics 150 (2019) 27–35 35
Equivalent Circuit Method (ECM) was used to model head and tailmasses considering mechanical properties and physical parame-ters. Final form was modeled in Finite Element Method (FEM) tofix head/tail ratio, ceramic dimensions and number of ceramicsin the stack. By considering the predefined parameters, two trans-ducers (e.g., T1 and T2) were selected and manufactured. The T1and T2 transducers both had an operating frequency of 4.9 kHzwith a mechanical quality factor of 3.5. Maximum TVR levels were133.7 dB//1 lPa/V for the T1 and 137.3 dB//1 lPa/V for the T2.Maximum RVS values were �159.1 dB//1 V/lPa at 4.9 kHz for theT1 and �156.8 dB//1 V/lPa at 5 kHz for the T2. According to theaccuracy of the results, FEM was the best one among the designmethods. On the other hand, the solution time took much longerthan ECM, which required that ECM was used first to decreasethe analysis time before FEM analysis. The comparison of theresults obtained from the design methods and experimental mea-surements indicated that calculated acoustic parameters werefairly good although there were some deficiencies to be improvedin the design methods such as prestress in the stress bolt and pas-sive elements like glue, electrodes and isolators.
The T1 and T2 transducers operating well below the operatingfrequency of the original prototype transducer and reaching com-parable acoustic performances for underwater applications weresuccessfully designed, manufactured and characterized. The acous-tic parameters were highly satisfied for the T2 transducers whencompared to the original prototype such that the operating fre-quency (f p) was 30% lower, the TVR values were almost the same,and particularly the RVS was 3.2 dB//1 V/lPa higher. Therefore, itcan be used instead of the original prototype in underwater appli-cations due to its comparable acoustic parameters attained atmuch lower operating frequencies.
Acknowledgements
Part of this research was funded by Ankara Yildirim BeyazitUniversity (Turkey) Scientific research project no. 2771) and isgreatly acknowledged.
Data availability
The raw/processed data required to reproduce these findingscannot be shared at this time due to technical or time limitations.
Appendix A. Supplementary data
Supplementary data to this article can be found online athttps://doi.org/10.1016/j.apacoust.2019.02.003.
References
[1] Sherman CH, Butler JL. Transducer and arrays for underwater sound. NewYork: Springer; 2007.
[2] Çepni K. A methodology for designing tonpilz-type transducers M.Sc.Thesis. Ankara-Turkey: Middle East Technical University, Graduate School ofNatural and Applied Sciences; 2011.
[3] Mason WP. Electromechanical transducers and wave filters. New York: VanNostrand; 1938.
[4] Krimholtz R, Leedom DA, Matthaei GL. New equivalent circuits for elementarypiezoelectric transducers. Electron Lett 1970;6:398–9. https://doi.org/10.1049/el:19700280.
[5] Miyama T, Nada T, Inoue T, Takahashi S, Konno M. Investigation for tonpilzpiezoelectric transducers with acoustic matching plates. In: IEEE 1987Ultrasonics Symposium. IEEE; 1987. p. 779–84. doi:10.1109/ULTSYM.1987.199065.
[6] Xiping H, Jing H. Study on the broadband tonpilz transducer with a single hole.Ultrasonics 2009;49:419–23. https://doi.org/10.1016/j.ultras.2008.10.016.
[7] Kim H, Roh Y. Design and fabrication of a wideband Tonpilz transducer with avoid head mass. Sens Actuators A 2016;239:137–43. https://doi.org/10.1016/j.sna.2016.01.029.
[8] Kai Z, De-shi W. Study on optimization of structure parameters to Tonpilztransducer. In: 2011 IEEE 2nd International Conference on Computing, Controland Industrial Engineering (CCIE). IEEE; 2011. p. 414–6. doi:10.1109/CCIENG.2011.6008152.
[9] Butler SC. Triple-resonant transducers. IEEE Trans Ultrason Ferroelectr FreqControl 2012;59:1292–300. https://doi.org/10.1109/TUFFC.2012.2320.
[10] Hawkins DW, Gough PT. Multiresonance design of a tonpilz transducer usingthe finite element method. IEEE Trans Ultrason Ferroelectr Freq Control1996;43:782–90. https://doi.org/10.1109/58.535479.
[11] Saijyou K, Okuyama T. Estimation of frequency characteristics of the Tonpilzpiezoelectric transducer with a bending piezoelectric disk. Appl Acoust2011;72:915–22. https://doi.org/10.1016/j.apacoust. 2011.05.015.
[12] Van Crombrugge M, Thompson W. Optimization of the transmittingcharacteristics of a tonpilz-type transducer by proper choice of impedancematching layers. J Acoust Soc Am 1985;77:747–52. https://doi.org/10.1121/1.392344.
[13] D. Teng, H. Chen, N. Zhu, G. Zhu, Y. Gou, Comparison About Design Methods ofTonpilz Type Transducer. In: Global Design to Gain a Competitive Edge,Springer London, London, n.d.: pp. 81–89. doi:10.1007/978-1-84800-239-5_9.
[14] Smith BV. The modelling of underwater, electroacoustic, sonar transducers.Appl Acoust 1994;41:337–63. https://doi.org/10.1016/0003-682X(94)90093-0.
[15] Çiçek M. Optimization of design parameters for tonpilz type transducers M.ScThesis. Ankara-Turkey: Middle East Technical University, Graduate School ofNatural and Applied Sciences; 2014.
[16] Chetaev DN. The impedance of a rectangular piston vibrating in an opening ina flat baffle. Prikl. Mat. Mekhan 1951;15:439–44 [in Russian].
[17] Burnett DS. Tables of rectangular piston radiation impedance functions, withapplication to sound transmission loss through deep apertures. J Acoust SocAm 1972;51:1618. https://doi.org/10.1121/1.1913008.
[18] Akkaya N. Acoustic radiation from baffled planar sources; a series approach M.Sc. Thesis. Lubbock: Texas Tech University, Graduate Faculty; 1999.
[19] Bobber RJ. Underwater electroacoustic measurements,document. Orlando: Naval Research Laboratory; 1970.
[20] Rajapan D. Performance of a low-frequency, multi-resonant broadbandTonpilz transducer. J Acoust Soc Am 2002;111:1692–4. https://doi.org/10.1121/1.1456927.




![JHR Publications 2018 - Odeon Publications 2018.pdf · multi-channel auralization technique as applied to solo instruments. Applied Acoustics, 2011, Vol. 72, pp. 311-323. [A-23] J.H](https://img.pdfslide.net/doc/110x75/5e488948e0ef0930f733eba0/jhr-publications-2018-odeon-publications-2018pdf-multi-channel-auralization.jpg)