Embed Size (px)
Citation preview

Applying Target Decomposition Algorithms on the Detection of Man Made Targets Using Polarimetric SAR
University of British Columbia
September, 2007
Flavio Wasniewski*, Ian Cumming

Objectives
1. Review the Detection of Crashed Airplanes (DCA) methodology applied by Lukowski et. al.
2. Test this methodology with a more diverse set of target clutters and types;
3. Compare its performance with available target detection algorithms;
4. Develop improvements to the methodology in order to give good detection performance to a range of target and clutter types.
2

Detection of Man Made Targets with Radar Polarimetry
3
High target-to-clutter ratio (not necessarily higher than in natural targets)
Dihedral scattering expected (phase information can be explored)
Polarimetric decompositions are among the most promising algorithms
Most civilian operational applications focus in ship detection

Detection of Crashed Airplanes (DCA)
Source: Lukowski et. al., CJRS, 2004
4
Promising in-land application
Tested on airplanes and low vegetation clutter
Tail and wings usually remain intact and provide dihedrals
Can it be applied to all discrete man made targets? (will dihedrals always be present?)
5
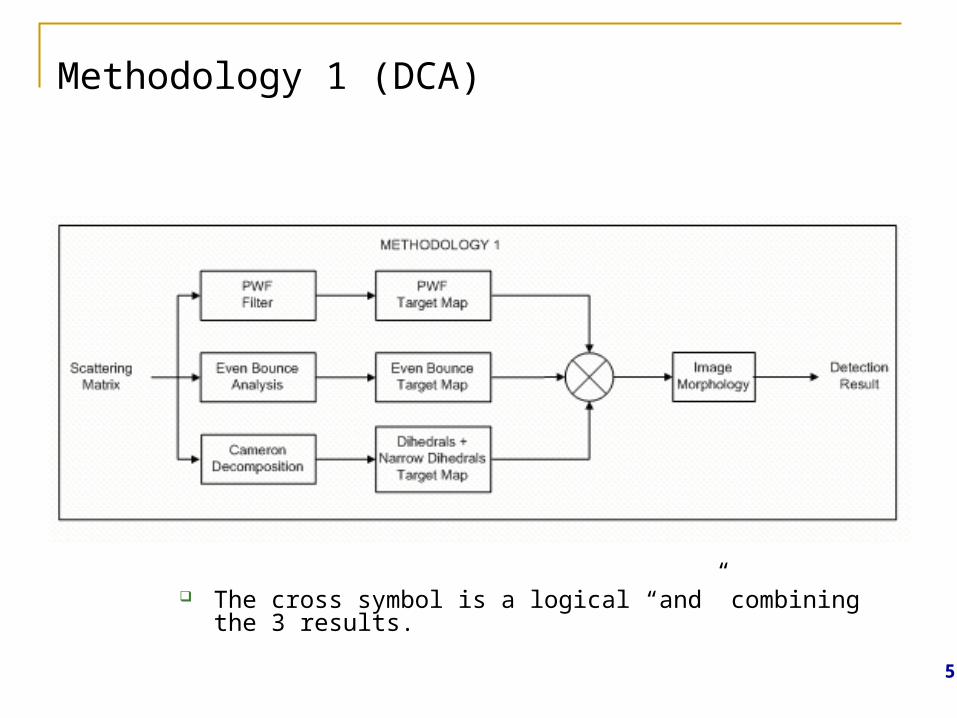
Methodology 1 (DCA)
The cross symbol is a logical “and” combining the 3 results.
6
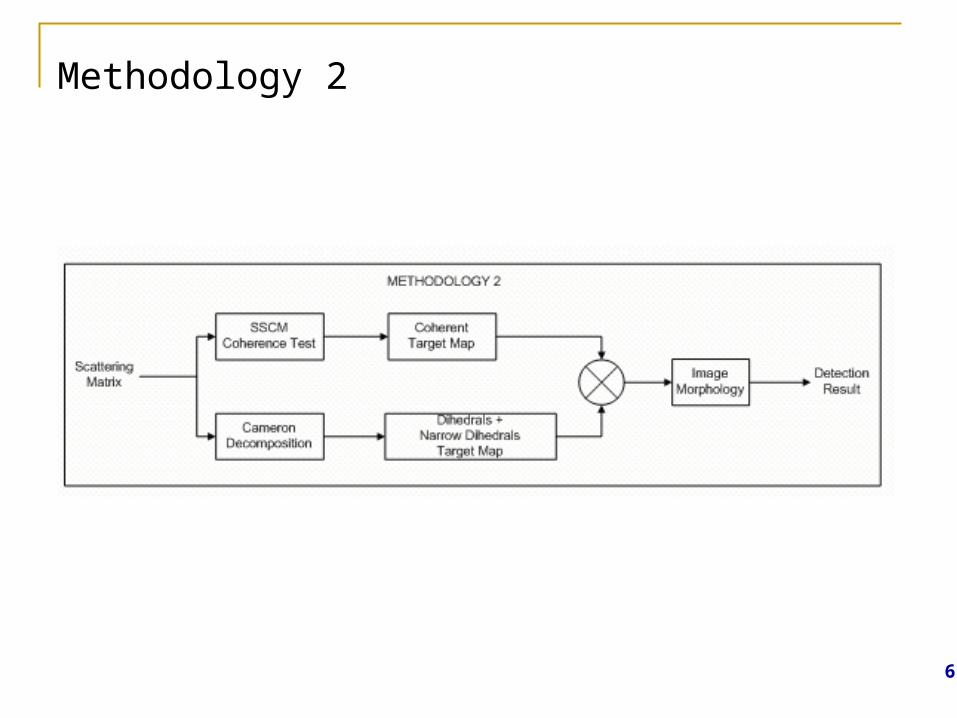
Methodology 2

7
Methodology 3

8
Methodology 4
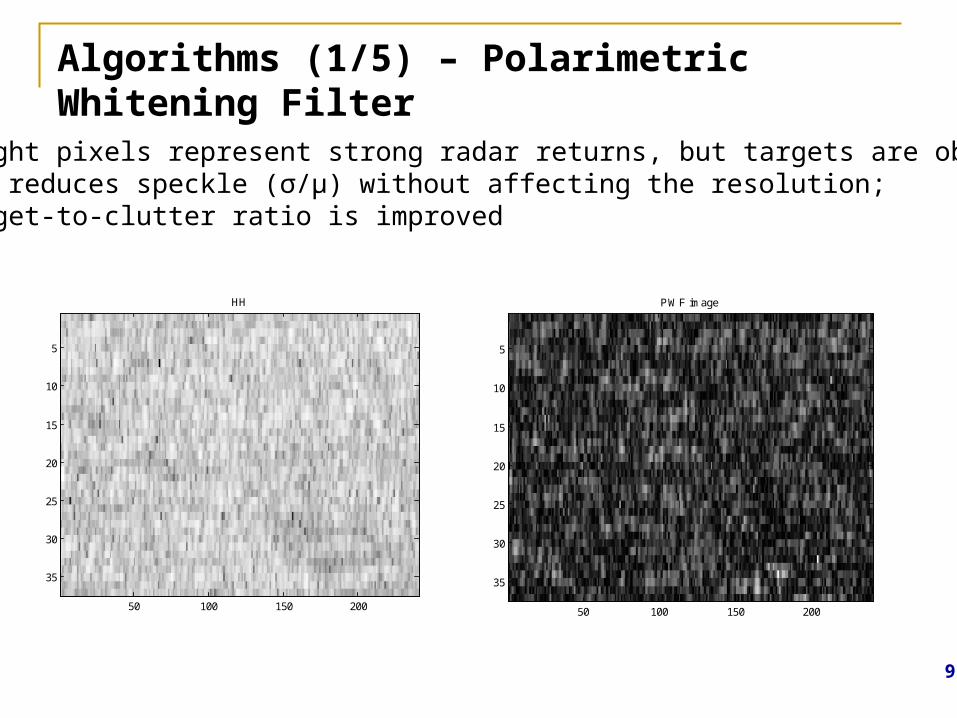
Algorithms (1/5) – Polarimetric Whitening Filter
9
Bright pixels represent strong radar returns, but targets are obscured; PWF reduces speckle (σ/µ) without affecting the resolution; Target-to-clutter ratio is improved
HH
50 100 150 200
5
10
15
20
25
30
35
PWF image
50 100 150 200
5
10
15
20
25
30
35

10
Algorithms (2/5) – Even Bounce Analysis
Explores the 180° phase shift between HH and VV
Even Bounce Image
100 200 300 400 500 600
5
10
15
20
25
30
35
40
HH
100 200 300 400 500 600
5
10
15
20
25
30
35
40
22
22 hv
vvhheven S
SSE

11
Algorithms (3/5) – Cameron Decomposition
Classifies the target according to the maximum symmetric component in one of six elemental scatterers.
10
01
10
01
00
01
5.00
01
5.00
01
i0
01
Target SM Z
Trihedral 1
Dihedral -1
Dipole 0
Cylinder 0.5
Narrow Diplane
-0.5
Quarter Wave
i
Source: Cameron, 1996
12
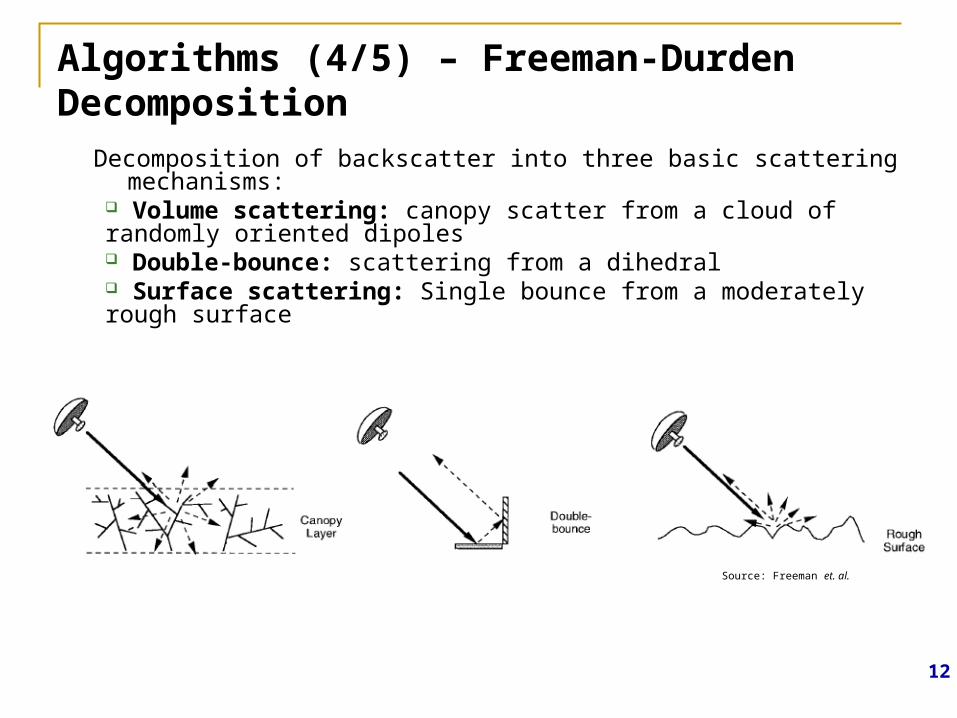
Algorithms (4/5) – Freeman-Durden Decomposition
Decomposition of backscatter into three basic scattering mechanisms: Volume scattering: canopy scatter from a cloud of randomly oriented dipoles Double-bounce: scattering from a dihedral Surface scattering: Single bounce from a moderately rough surface
Source: Freeman et. al.

13
Algorithms (5/5) – Coherence Test
Detects coherent targets based on the degree of coherence and target-to-clutter ratio.
22
2*
222.4
symp
Degree of coherence
and are the Pauli components

•Closing (dilation + erosion)•Clustering•Erasing 1 and 2-pixel detections
Morphological processing
14

Experiments: data sets used (1)
Gagetown dataset
15

Experiments: data sets used (2)
Westham Island dataset
16

17
Results – Target 21 (House Among Trees)
CV-580 data Target and clutter(Ikonos image)

18
Results – Target 21 – Methodology 1 PWF and Even Bounce
PWF Target Map (K = 2)
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70
Even Bounce Target Map (K = 7 )
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70

19
Cameron, PWF and Even Bounce
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70
Detection Map - Methodology 1
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70
Results – Target 21 – Methodology 1 Cameron combined to PWF and Even Bounce

20
Results – Target 21 – Methodology 2Coherence Test Target Map
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70
Cameron and Coherence Test Map
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70
Detection Map - Methodology 2
50 100 150 200 250 300 350 400
10
20
30
40
50
60
70

21
Results – Target 21 – Methodology 3
Detection map after morphology

22
Results – Target 21 – Methodology 4
Cameron + PWF + Even Bounce + Coherence Test Detection map
23
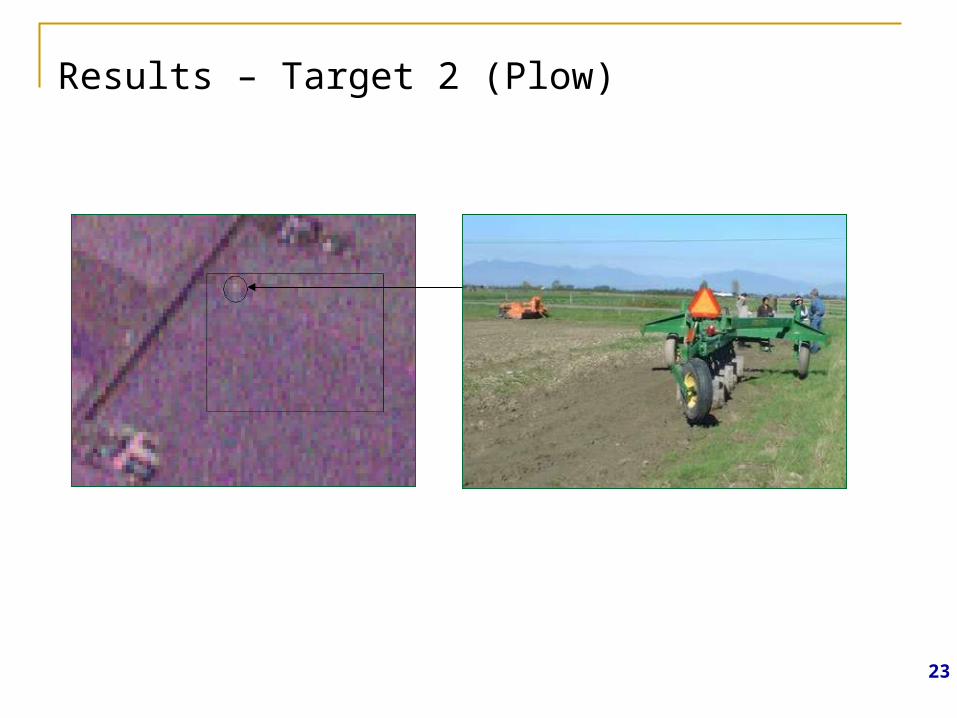
Results – Target 2 (Plow)
24
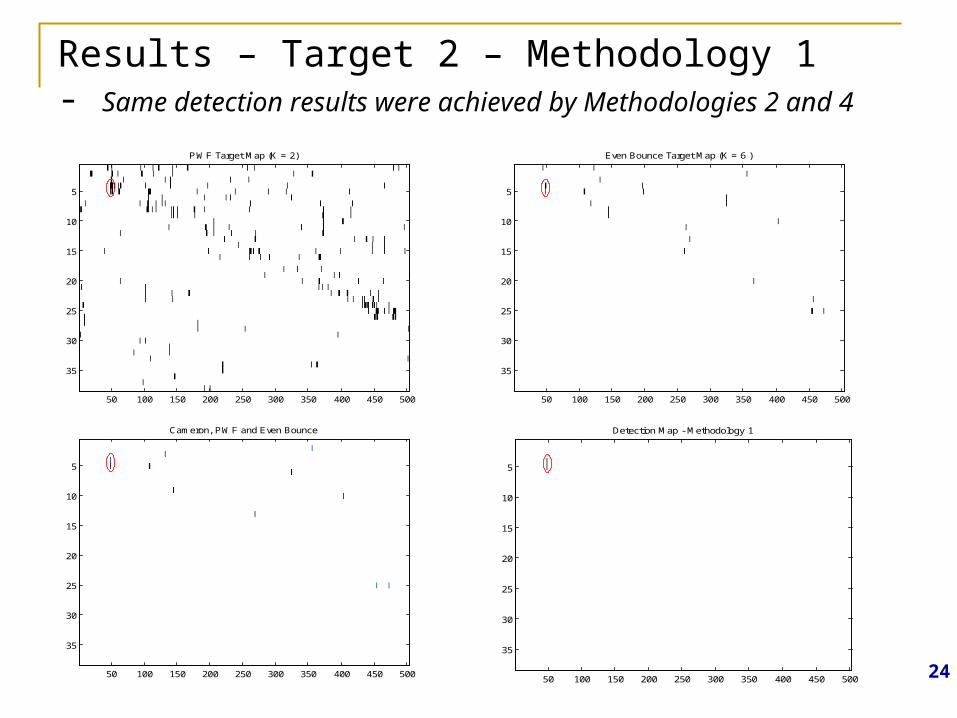
Results – Target 2 – Methodology 1 - Same detection results were achieved by Methodologies 2 and 4
PWF Target Map (K = 2)
50 100 150 200 250 300 350 400 450 500
5
10
15
20
25
30
35
Even Bounce Target Map (K = 6 )
50 100 150 200 250 300 350 400 450 500
5
10
15
20
25
30
35
Cameron, PWF and Even Bounce
50 100 150 200 250 300 350 400 450 500
5
10
15
20
25
30
35
Detection Map - Methodology 1
50 100 150 200 250 300 350 400 450 500
5
10
15
20
25
30
35

25
Results – Target 5 (Horizontal cylinders)
Cameron, PWF and Even Bounce
20 40 60 80 100 120 140 160 180
5
10
15
20
25
Cameron and Coherence Test Map
20 40 60 80 100 120 140 160 180
5
10
15
20
25
Man made target with no dihedral behaviour
No detections

26
Results – Target 7 (House)
Detection Map - Methodology 1
50 100 150 200 250 300 350
10
20
30
40
50
60
70
Detection Map - Methodology 2
50 100 150 200 250 300 350
10
20
30
40
50
60
70
Detection Map - Methodology 4
50 100 150 200 250 300 350
10
20
30
40
50
60
70

27
Results – Target 20 (Crashed Plane in Grass)
PWF image
200 400 600 800 1000 1200
10
20
30
40
50
60
70
80
90
Corner reflectors
Target
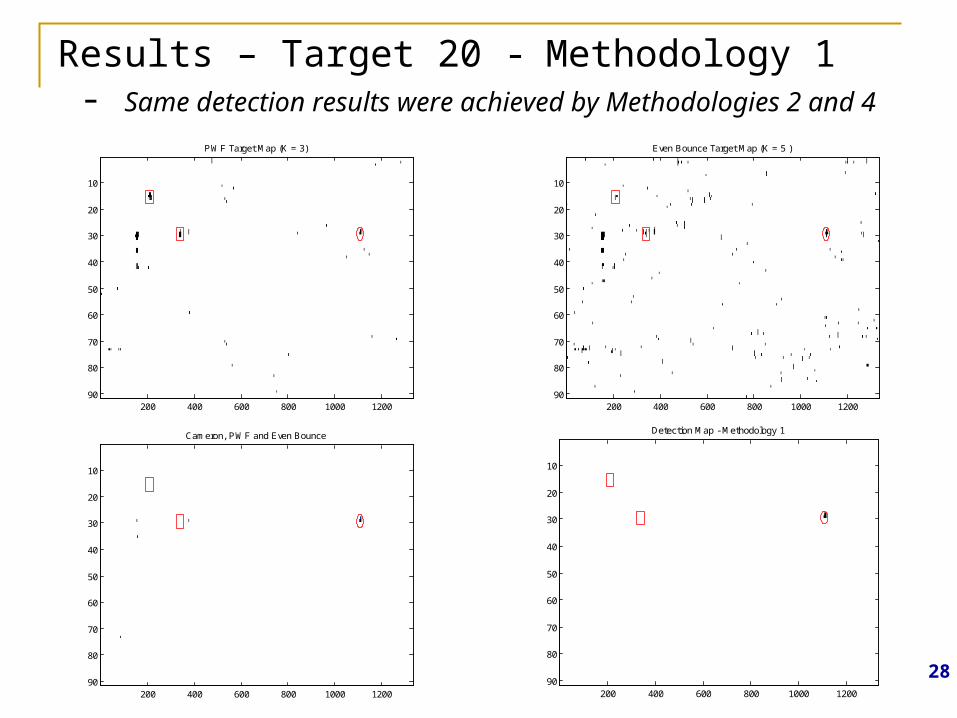
Results – Target 20 - Methodology 1 - Same detection results were achieved by Methodologies 2 and 4
PWF Target Map (K = 3)
200 400 600 800 1000 1200
10
20
30
40
50
60
70
80
90
Even Bounce Target Map (K = 5 )
200 400 600 800 1000 1200
10
20
30
40
50
60
70
80
90
Cameron, PWF and Even Bounce
200 400 600 800 1000 1200
10
20
30
40
50
60
70
80
90
Detection Map - Methodology 1
200 400 600 800 1000 1200
10
20
30
40
50
60
70
80
9028

Results
Methodology 1 Methodology 2 Methodology 4
Total False Alarm count
5 14 1
Total False Alarm Rate
210 1087 72
Methodology 1 Methodology 2 Methodology 4
False Alarm count
(Low Vegetation)0 3 0
False Alarm count
(High & medium Vegetation)
5 11 1
Total
Per Vegetation type
29
Summary
Methodology 1 (DCA) detected the targets with no false alarms when clutter is low vegetation. It did present false alarms in high vegetation;
Methodology 2 (Coherence Test) typically detects the target with few false alarms in both situations;
Methodology 3 (Freeman-Durden decomposition) generally presented high false alarm rates in this study;
Methodology 4 (DCA + Coherence Test) performs better than DCA methodology on high vegetation clutter.
30

Thank you









![[3em] A General Model--Based Polarimetric Decomposition ...earth.esa.int/workshops/polinsar2009/participants/... · Maxim Neumann, Laurent Ferro-Famil, Eric Pottier. Motivation Volume](https://img.pdfslide.net/doc/110x75/5ea9bddd4332694f335c9dd6/3em-a-general-model-based-polarimetric-decomposition-earthesaintworkshopspolinsar2009participants.jpg)