Embed Size (px)
Citation preview
Ž .JOURNAL OF ALGORITHMS 21, 403]414 1996ARTICLE NO. 0050
Approximation Algorithms for Network DesignProblems on Bounded Subsets
Dorit S. Hochbaum*,†
Department of IE & OR, Uni ersity of California, Berkeley, California 94720
and
Ž . ‡,§Joseph Seffi Naor
Computer Science Department, Technion, Haifa 32000, Israel
Received May 11, 1994; revised August 1995
We address the problem of designing a network so that certain connectivityrequirements are satisfied, at minimum cost of the edges used. The requirementsare specified for each subset of vertices in terms of the number of edges with oneendpoint in the set. We address a class of such problems, where the connectivity is
Ž .required for sets of bounded size, p. We show that for fixed p p F 2 , theproblem is NP-complete, regardless of whether the requirement function is properor not. For this class of bounded network design problems, we describe anŽ .O log p -approximation algorithm for the case of a proper requirement function.
We introduce a relaxation of the network design problem on directed graphs, wherethe requirement of each set is satisfied by the arcs that have their tails in the set.The relaxation allows arcs within the set to count toward the requirement of theset. We show that this relaxed problem is polynomial-time solvable if the require-ment function is proper. The corresponding relaxation of the undirected problem isalso polynomial-time solvable when the requirement function is proper. It is shownthat in the case where the requirement function is not proper, the relaxed versionis NP-complete. The integer relaxed problem or its linear programming relaxationis used to produce an approximate solution to the network design problem. Ouranalysis illustrates that the requirement of properness affects the difficulty of theproblem. Q 1996 Academic Press, Inc.
* Supported in part by the Office of Naval Research under Grant ONR N00014-91-J-1241.† E-mail: [email protected].‡ Part of this work was done while the author was visiting the Department of IE & OR,
University of California, Berkeley, CA, and supported by Grant ONR N00014-91-J-1241.Research also supported by Grant 92-00225 from the United States]Israel Binational Science
Ž .Foundation BSF , Jerusalem, Israel.§ E-mail: [email protected].
403
0196-6774r96 $18.00Copyright Q 1996 by Academic Press, Inc.
All rights of reproduction in any form reserved.
HOCHBAUM AND NAOR404
1. INTRODUCTION
Network design problems are important practical and theoretical prob-lems of designing networks that are resilient to failures. Suppose we are
Ž .given an undirected graph G s V, E , where each edge e g E is associ-Ž .ated with a cost c e . We address the problem of designing a network so
that certain connectivity requirements are satisfied, at minimum cost ofthe edges used. A general way of stating these connectivity requirements is
Ž .by specifying for each subset S ; V the minimum number of edges, f S ,Ž .in the cut S, V y S . Our goal is to find a minimum cost subgraph that
satisfies the function f for all subsets S ; V. We refer to this problem asŽ .the network design problem NDP .
One obvious difficulty with specifying the input to the general networkŽ .design problem is the number of sets S for which f S ) 0. We assume
that the function f is represented in some succinct way; i.e., given a subsetŽ .S, there is a polynomial-time algorithm that computes f S .
It is common to impose the condition that the function f is proper, i.e.:
v Ž . Ž .Symmetry: f S s f V y S for all S ; V.
v Ž .Maximality: If A and B are disjoint, then f A j B F� Ž . Ž .4max f A , f B .
The above formulation captures a large class of connectivity problems.A special case of NDP is finding a minimum Steiner tree for a given set of
Ž .terminals in a graph. Here, f S s 1, if both S and V y S contain aterminal. Hence, NDP is NP-complete in general. Another example is
Ž .finding a minimum cost k-connected subgraph. Here, we set f S s k forall subsets S ; V. It is interesting to note that for this special case a
w xpolynomial algorithm that achieves an approximation factor of 2 exists 11 .In both examples, it is easy to verify that the function f is proper.
We focus here on a particular type of network design problems. Forthese problems, the requirement function is specified only for subsets thatare of bounded size. The rationale is that in the applications that origi-nated the study of network design problems, the sets with specific require-ment represented certain entities or groups that are commonly of smallsize such as pairs. For example, the requirement function is limited to acollection of small clusters in the network. Thus, the assumption that therequirement function is applied to a limited selection of subsets is reason-able in many cases. To our best knowledge, this is the first paper thatconsiders this special case of network design problems.
NETWORK DESIGN ON BOUNDED SUBSETS 405
General network design problems have received much attention in thew x w xliterature, e.g., 12 . Goemans and Williamson 7 gave a polynomial-time
algorithm that achieves an approximation factor of 2 for the generalizedSteiner problem, i.e., for a proper requirement function attaining values
� 4 w xfrom the 0, 1 domain. This result was later generalized by 13 forarbitrary domains: they achieved an approximation factor of 2 f , wheremax
Ž .f s max f S . This approximation factor was further improved bymax S ; Vw x Ž .5 to 2 HH f , where HH denotes the Harmonic function. We note thatmaxthe latter result holds for a family of requirement functions called weaklysupermodular which generalizes proper functions.
The bounded size network design problem is defined as follows: for eachŽ .subset S ; V, if f S ) 0, then either S or V y S contains at most p ver-
tices. The main result presented in this paper is that for bounded sizeŽ .network design problems, an O log p -approximation algorithm is pro-
vided. This approximation is independent of the values of the require-w xments on the subsets. Our approximation algorithm uses the result of 5
Ž w xand therefore holds only for proper requirement functions although 5.holds for a slightly more general class of functions .
We first show that network design problems on bounded subsets areNP-complete even for the case where p s 2, and the requirement functionis proper. We note that the case where p s 1 can be solved optimally inpolynomial time, since this is polynomially reducible to the minimum
Ž w x .weight perfect matching problem see, e.g., 9 for such a reduction .Our approach is based on two levels of relaxation of the problem. We
first consider the directed network design problem, which we show is alsoNP-complete. We then further relax the directed problem by allowingedges within a set to satisfy its requirement. We prove that an optimalinteger solution to this relaxation can be computed in polynomial time by agreedy algorithm, if the function is proper. In the case where the functionis not proper, an optimal fractional solution is computed. Either theinteger or the fractional optimal solution is then used to produce anapproximate solution to the original network design problem. The idea isthat once we have the solution to the relaxed problem, the originalproblem can be reduced to a different NDP instance where the require-
Ž 2 .ments are bounded by O p . When the function f is proper, one canw xthen call for the procedure of 5 which delivers a solution with the
required bound.The reduction of the problem to one with bounded requirements is done
in polynomial time even if the sets are not of bounded size, and even if thew xrequirement function is not proper. The procedure of 5 assumes that the
requirement function is proper, and hence we cannot achieve the claimedapproximation factor unless the requirement function is indeed proper.However, we can still achieve the reduction.
HOCHBAUM AND NAOR406
It should be noted that the relaxed integer network design problem issolvable in polynomial time for proper functions even when the sets arenot of bounded size. However, for functions that are not proper, therelaxed problem is NP-complete. Therefore, proper requirement functionsmake the problem substantially easier. The undirected version of therelaxed problem is also solvable in polynomial time for proper functions.
In Section 2 we present the NP-completeness results, the reduction ofthe problem to one with bounded requirements, and the polynomial-timealgorithm for solving the relaxed problem when the function is proper. InSection 3 we describe our approximation algorithm. In Section 4 we show apolynomial p-approximation algorithm for a relaxed version of our net-work design problem for a non-proper function.
2. THE DIRECTED NETWORK DESIGN PROBLEM
We first show that the general network design problems on boundedsubsets is NP-complete even if the requirements are only for sets with upto 2 vertices, i.e., p s 2. We first show that this problem is NP-completefor arbitrary requirement functions, and then prove this for proper re-quirement functions.
The reduction in the case of an arbitrary requirement function is fromŽ w x.the Vertex Cover problem see 6 : Let the input to the Vertex CoverŽ .problem be a graph G s V, E and a non-negative cost c for each¨
¨ g V. Construct the following graph H: the vertex set of H is V j u,where u is a ‘‘dummy’’ vertex. The only edges in H are those connecting
Ž .the vertices in V to u. For each ¨ g V, the cost of edge ¨ , u in H is c .¨Ž .Define now for each edge ¨ , w g G a subset S in H with a require-¨ w
ment of 1. It is not hard to see that vertex ¨ g V belongs to the optimalŽ .vertex cover in G if and only if edge ¨ , u is in the optimal NDP solution
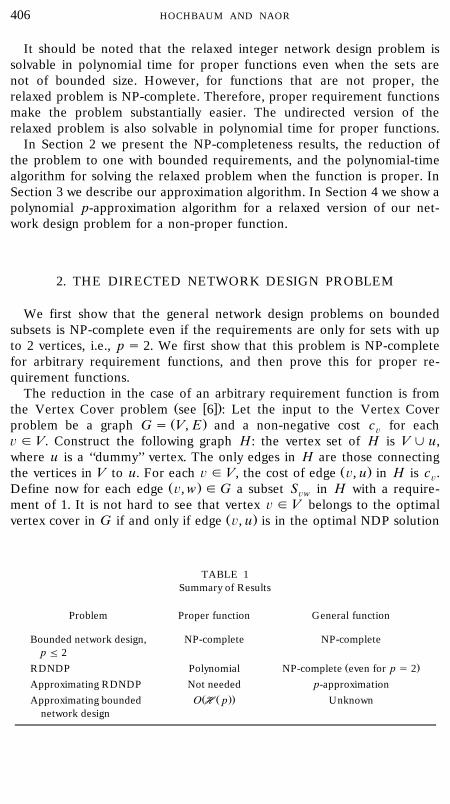
TABLE 1Summary of Results
Problem Proper function General function
Bounded network design, NP-complete NP-completep F 2
Ž .RDNDP Polynomial NP-complete even for p s 2Approximating RDNDP Not needed p-approximation
Ž Ž ..Approximating bounded O HH p Unknownnetwork design
NETWORK DESIGN ON BOUNDED SUBSETS 407
for H. Note that the requirement function in this reduction is not proper.As a result, we get the following theorem.
THEOREM 2.1. The network design problem on bounded sets with p F 2and with a general requirement function is NP-complete.
We now proceed to the case where the requirement function is proper.Ž .Let G s V, E be an undirected graph, where all edge costs are uniform.
Suppose that the requirement function f is defined as follows: for all< < Ž . Ž .subsets S ; V, such that S F 2, f S s 1. Clearly, an edge u, ¨ g E
that is chosen by an optimal solution of this NDP instance would satisfythe requirement of all subsets to which u and ¨ belong, except for the
� 4subset u, ¨ . Hence, any optimal solution cannot contain isolated edges.Therefore, an alternative formulation of this NDP instance is the follow-ing: cover the vertices of G by paths of length 2, such that the total
Žnumber of edges chosen is minimized. The length of a path is equal to the.number of edges it contains.
We will now concentrate on a special case of this problem. Suppose that< <V is a multiple of 3; Determine whether the vertex set V can be coveredby a set of disjoint paths of length 2. Two paths are called disjoint if they
wdo not share a vertex. This problem is a special case of 6, Problem GT12,x w xp. 193 , where q s 3, and H is a path of length 2. Kirkpatrick and Hell 10
showed that this problem is NP-complete for any fixed H containing atleast three vertices. Therefore, we conclude with the following theorem.
THEOREM 2.2. The network design problem on bounded sets with p F 2and with a proper requirement function is NP-complete.
Ž .We are now ready to define the directed network design problem DNDPwith respect to a directed graph. It is essentially NDP with the additional
Žconstraint that only arcs that leave a subset S i.e., arcs with a tail in the. Ž .set S may satisfy the requirement f S . We observe that the same
Ž .reduction from Vertex Cover used for the proof of Theorem 2.1 can beused to show that DNDP is NP-complete even for the case of bounded
Ž . Žsubsets. In the construction of graph H, replace each edge ¨ , u for all.¨ g V by an arc ¨ ª u.
Our approximation algorithm relies on approximating the directed ver-sion of the problem first. We convert the graph G into a directed graph
Ž . Ž .D s V, A as follows. Each edge e s u, ¨ is replaced by two arcs, u ª ¨Ž .and u ¤ ¨ , where each arc has cost c e . Hereafter, the elements of E are
referred to as edges, and those of A as arcs.A solution to NDP can be constructed from a solution to the corre-
sponding DNDP as follows. If an arc u ª ¨ belongs to the solution ofŽ .DNDP, then edge e s u, ¨ is chosen to the solution of NDP. The
following proposition is immediate.
HOCHBAUM AND NAOR408
PROPOSITION 2.1. The cost of an optimal solution to DNDP can be atŽmost twice the cost of an optimal solution to NDP from which it was
.deri ed .It follows from Proposition 2.1 that an algorithm that achieves an approxi-mation factor of c to DNDP achieves a factor of 2c to NDP.
Our next step is to formulate DNDP as a multi-set-cover problem. Theelements to be covered are the subsets S, and each directed arc u ª ¨ is aset that contributes one unit to the coverage of any subset S containing u
Ž .and not ¨ . We need to cover each subset S by at least f S such arcs. Let� 4x be a 0, 1 variable that assumes the value 1 if arc u ª ¨ is in the cover,a
and 0 otherwise. We arrange the variables in the following order: Let A¨be the set of arcs originating at vertex ¨ , and let x be a vector denoting¨
Žthe variables corresponding to A . The variables in x are sorted from¨ ¨. Ž .left to right in increasing order of their cost. Let x s x , . . . , x , and let¨ ¨1 n
f be a vector denoting the requirements for all subsets S in some order.Ž .We denote by B s b the constraint matrix of the following integeri, j
programming formulation of the multi-set-cover problem. The rows of BŽ .correspond to subsets S in the same order as in f , and the columns to the
arcs A. For an arc a s u ª ¨ , b s 1 if u g S and ¨ f S:S, a
min c a ? xŽ .Ý aagA
subject to: B ? x G f< <A� 4x g 0, 1 .
We are now ready to define the relaxed directed network design problemŽ .RDNDP . For this problem we also allow arcs that are contained in S to
Ž .satisfy f S . Recall the reduction from Vertex Cover that was used to showthat DNDP is NP-complete. In the construction of graph H in thereduction from Vertex Cover, the subsets created do not contain anyinternal edges. Hence, the same reduction can be used to prove that
ŽRDNDP is also NP-complete on bounded subsets, even if p s 2. Note.that the reduction holds for the relaxed undirected problem as well .
Ž X .Let B9 s b be the constraint matrix of RDNDP. Then, for a s u ªi, j¨ , bX s 1 if u g S. Notice that the columns of B9 corresponding to a setS, aof variables A are all identical. This happens since the value of the entry¨depends on ¨ and S only, and not on the particular arc. In each row of
Žmatrix B9, we refer to the entries corresponding to set A , for each¨.¨ g V , as a block. The following proposition can easily be verified with
< <the assumption that S F p.
PROPOSITION 2.2. In each row of B9, there are at most p blocks ofconsecuti e 1’s.
NETWORK DESIGN ON BOUNDED SUBSETS 409
We next compute an optimal fractional solution for RDNDP. Let y*denote this solution. We note that we choose a formulation of a linearprogramming with bounded variables in which a non-basic variable can beeither at the lower bound or at the upper bound. Since the columnscorresponding to each set of variables in A are identical, only one of each¨such set can be a basic variable. We then have the following result that iswell known in the context of piecewise linear approximation to convex
w x Žfunctions; see 2, pp. 482]486 where the structure of the problem isidentical}i.e., sets of variables that have identical columns in the matrix,and in the objective function the coefficients for each set are monotoni-
.cally nondecreasing .
U Ž .LEMMA 2.1. In y*, for all ¨ g V, y is of the form 1, . . . , 1, a , 0, . . . , 0 ,¨where 0 - a F 1.
The fractional problem is then a standard linear programming problem,except that the number of constraints in the matrix corresponds to the
Ž .number of sets S for which f S ) 0, which may be exponential in thew xlength of the input. We therefore must use the Ellipsoid method 8
Žcoupled with a separation routine for finding a violated constraint or, aset for which the requirements are not satisfied by the current fractional
.solution . Such a separation algorithm employing a minimum cut proce-w xdure has been introduced in the literature 4 . Alternatively, it is also
possible to use the Frank and Tardos approach for a strongly polynomialimplementation of the Ellipsoid method for this case, as the matrix is
w xso-called combinatorial 3, 8 . For a problem on m edges, the running timeŽ 7.of the strongly polynomial Ellipsoid method is O m calls to a separation
routine. We later show how to use an alternative approach for solving theinteger version of the problem which is more efficient for proper functions.
2.1. The Case of a Proper Function
Ž .The proof that RDNDP is NP-complete sketched previously assumedthat the requirement function can be general. As we shall see now, it turnsout that the assumption of properness on the requirement function inRDNDP substantially reduces the difficulty of this problem. In fact, in thiscase, RDNDP is solvable by a simple greedy algorithm.
LEMMA 2.2. If f is a proper function then the problem RDNDP is sol ablein polynomial time.
Proof. We first show that for the case where the function f is proper,Ž . Ž .there is a single vertex ¨ g S such that f ¨ G f S . This is proved
constructively by the following algorithm.
HOCHBAUM AND NAOR410
< <If S s 1, output S< <While S ) 1 do
Let ¨ g SŽ . Ž .If f ¨ G f S , then y output ¨
Else S ¤ S y ¨ and call the algorithm recursivelyŽ Ž . Ž . .Note: f S y ¨ G f S , otherwise maximality is violated
End.
It is now clear that a greedy algorithm will produce an optimal integralŽ .solution, assuming f is proper: i Sort the arcs in the graph according to
Ž .their cost; ii add the arcs one-by-one to the solution, as long as an arccontributes toward the requirement of a vertex.
The undirected relaxed problem is somewhat more involved. The claimthat it suffices to satisfy the requirements of singletons is independent ofthe graph being directed or not. The problem is now defined for anundirected graph, where each singleton has a certain requirement. Thisproblem is known to be equivalent to the perfect matching problem and istherefore solvable in polynomial time.
3. APPROXIMATING THE DIRECTED NETWORKDESIGN PROBLEM
In this section we discuss how to approximate NDP using a solution forRDNDP.
We first consider the case where an optimal fractional solution forRDNDP, denoted by y*, was computed by linear programming techniques.Recall that this is needed in case of an arbitrary requirement function. Inthis case we round y* to y, as follows. For all ¨ g V, if yU contains an entry¨equal to a , where a / 1, then that entry is rounded down to 0 in y. Theother case we consider is when an optimal integral solution for RDNDPwas obtained by the greedy algorithm presented in Section 2.1. Here, welet y be this solution. The first step in approximating NDP is deriving anundirected solution y9 from y by replacing each arc u ª ¨ belonging to y
Ž .by an edge e s u, ¨ in y9.We summarize the steps of the algorithm up to now.
1. Reduce NDP to DNDP.2. Reduce DNDP to RDNDP.3. Find an optimal fractional or integral solution y* to RDNDP.4. Round down y* to y, and derive an undirected solution y9 from it.

NETWORK DESIGN ON BOUNDED SUBSETS 411
We view y9 as an initial solution for problem NDP. Clearly, y9 does notnecessarily satisfy the requirement function f , since an edge that is
Ž .contained in a subset and chosen by y9 will not contribute toward therequirement of that subset in NDP. We now show how to augment y9 to asolution for problem NDP. To that end we define a new function g on the
Ž .subsets of V such that for each subset S, g S is equal to the deficiency ofŽ . Ž .S in y9 with respect to f S . Formally, we let y9 S denote the number of
edges in the characteristic vector y9 that have one endpoint in the set S.Then,
g S s max f S y y9 S , 0 .� 4Ž . Ž . Ž .
LEMMA 3.1. For all subsets S ; V,
g S F p2 .Ž .
Ž .Proof. In RDNDP as opposed to DNDP , we allow arcs that areŽ .contained in a subset S to satisfy f S . Since the cardinality of all
pŽ .constrained subsets is at most p, there are at most 2 ? such edges. It2follows from Proposition 2.2 and Lemma 2.1 that by rounding y* to y, forall subsets S ; V, the deficiency of S could have increased by at most p.Hence,
p 2g S F 2 q p s pŽ . ž /2
and the lemma follows.
Note that the lemma applies both for the proper and improper functionŽ . 2cases. For proper functions there is a slight improvement, g S F p y p.
We now remove from the graph G al the edges that participate inX Ž .solution y9, i.e., the edges e where y s 1, and obtain graph G9 s V, E9 .e
Ž .We define a new network design problem of type NDP with respect toŽ .graph G9 and function g. From the lemma above Lemma 3.1 it follows
that the requirement of each subset in the new problem is at most p2. Forproper functions the most efficient approximation algorithm for this prob-
w xlem is that of 5 which achieves, in our case, an approximation factor ofŽ 2 .2 HH p .
w xTo apply the algorithm of 5 in our case, we need a subroutine forfinding a minimal violated set. A violated set is a subset S ; V for whichthe function g is not satisfied. By a minimal violated set we mean a setsuch that none of its proper subsets are violated. Let h be a function
Ž . Ž .defined on the subsets of V such that for all S ; V, h S F f S andŽ . Ž . Ž . Ž . Ž .g S s f S y h S . In our case, the function h S is y9 S . Gabow et al.
HOCHBAUM AND NAOR412
w x4, p. 67 have shown how to compute a minimal violated set for a functionwhich is defined to be the difference between a proper function and an
w xarbitrary function. Hence, the algorithm of 5 can be used for f a properfunction.
The remaining steps of our algorithm are hence as follows:
Ž 2 .5. Find a 2 HH p -approximation for NDP on the graph G9. Let thissolution be z.
6. Output solution w s z q y.
Let z9 be an optimal solution for the new problem defined with thefunction g on the graph G9 as in Step 5 of the algorithm. Our final outputis solution w which is defined to be the union of the edges in z and y9,where y9 is the undirected solution derived from the directed solution y.Clearly, w satisfies the requirement of the function f.
Ž .We denote by x* an optimal integral solution to the original networkdesign problem with f proper on graph G.
THEOREM 3.1. The approximation algorithm achie es
cost w F 2 HH p2 q 2 ? cost x* .Ž . Ž .Ž .Ž .
Ž . Ž .Proof. We first observe that cost z* F cost x* , as it corresponds to aŽ .solution for a problem with smaller requirements. Hence, cost z F
Ž 2 . Ž . Ž 2 . Ž . Ž . Ž . Ž .2 HH p ? cost z* F 2 HH p ? cost x* . Since cost y F cost y* F cost x*Žthe first inequality since we rounded down, and the second inequalitycompares a linear programming optimal solution to an integer optimal
.solution , and y9 is derived from y by duplicating each directed arc, itŽ . Ž .follows that cost y9 F 2 ? cost x* . The cost of w is upper bounded by
Ž . Ž .cost z q cost y9 , and hence the theorem follows.
Notice that we can add to the requirements on subsets, also a require-ment that the network be q-connected. This will affect the approximation
w xratio by only an additive factor of 2 11 .
4. THE RELAXED DIRECTED NETWORK DESIGNPROBLEM
In this section we discuss the complexity of approximating RDNDP inthe case of a general requirement function. We have already established
Ž .that this problem is NP-complete Section 2 . We now show how to find ap-approximation for the integer RDNDP problem defined on subsets ofcardinality at most p, where the function f is arbitrary.
NETWORK DESIGN ON BOUNDED SUBSETS 413
We first find an optimal fractional solution, denoted by x*. This can bedone using the Ellipsoid Algorithm as discussed in Section 3. Clearly, foreach row in the matrix there can be at most p entries which are strictlycontained between 0 and 1. Our approximation algorithm is very simple:all fractional entries that are bigger than or equal to 1rp are rounded upto 1, and all the rest are rounded down to 0. This can increase the value ofthe fractional optimal solution by at most a multiplicative factor of p. Wewill refer to this algorithm as the 1rp-rounding algorithm.
LEMMA 4.1. The 1rp-rounding algorithm is a p-approximation algorithm.
Proof. We first show that the 1rp-rounding algorithm produces afeasible solution. This follows since the requirement function is integral.To see that, let us fix a row, and let a denote the sum of the entries whosevalue is at least 1rp, and let b denote the sum of the remaining entries.Let the value of the requirement function for this row be k. Clearly, b - 1.By definition, a q b G k; hence, a ) k y 1. After rounding up the entriesthat are greater than 1rp, let their sum be an integer a9. Since a9 G a, itfollows that a9 G k, and hence the requirement function is satisfied.
5. DISCUSSION
We analyze approximation algorithms for the network design problemwhen the size of the sets for which there is a positive requirement isbounded, while allowing in addition general connectivity requirements. Weshow here that the condition on the requirement function commonly madefor network design problems is restrictive and affects the approximabilityof the problem. For the network design problem with a general require-ment function, we conjecture that it may be possible to obtain a fixedapproximation ratio, if p is a constant. As of now, such approximationalgorithms are not known. Our results only allow to reduce such a problemto a similar type problem, where the requirements are 1 or 0. However,there is no known algorithm for approximating such network designproblems, if the requirement function is not proper. We also conjecturethat it should be possible to approximate the bounded subset networkdesign problem by a factor of p for the case of an arbitrary requirementfunction.
ACKNOWLEDGMENTS
Many thanks to David Williamson for his suggestions for improving the presentation of thisw xpaper, and for pointing out the procedure in 4 for finding a minimal violated set. The first
HOCHBAUM AND NAOR414
Ž .author is indebted to R. Ravi for a discussion that led to the conclusion that the properrelaxed problem can be solved in polynomial time.
REFERENCES
1. A. Agrawal, P. Klein, and R. Ravi, When trees collide: An approximation algorithm forŽ .the generalized Steiner problem in networks, SIAM J. Comput., 24 1995 , 440]456.
2. G. B. Dantzig, ‘‘Linear Programming and Extensions,’’ Princeton Univ. Press, Princeton,NJ, 1963.
´3. A. Frank and E. Tardos, An application of simultaneous approximation in combinatorialŽ .optimization, Combinatorica 7 1987 , 49]65.
4. H. N. Gabow, M. Goemans, and D. Williamson, An efficient approximation algorithm forthe survivable network design problem, in ‘‘Proceedings of the 3rd MPS Conference onInteger Programming and Combinatorial Optimization, 1993,’’ pp. 57]74.
´5. M. Goemans, A. Goldberg, S. Plotkin, D. Shmoys, E. Tardos, and D. Williamson,Improved approximation algorithms for network design problems, in ‘‘Proceedings of 5thACM]SIAM Symposium on Discrete Algorithms, Arlington, Virginia, 1994, pp. 223]239.
6. M. R. Garey and D. S. Johnson, ‘‘Computers and Intractability }A Guide to the Theoryof NP-Completeness,’’ W. H. Freeman, San Francisco, 1979.
7. M. Goemans and D. Williamson, A general approximation technique for constrainedŽ .forest problems, SIAM J. Comput. 24 1995 , 296]317.
8. M. Grotschel, L. Lovasz, and A. Schrijver, ‘‘Geometric Algorithms and Combinatorial¨ ´Algorithms,’’ Springer-Verlag, Berlin, 1988.
9. D. S. Hochbaum and A. Pathria, LU-matching, UC Berkeley manuscript, November 1994.10. D. G. Kirkpatrick and P. Hell, On the complexity of general graph factor problems, SIAM
Ž .J. Comput. 12 1983 , 601]609.11. S. Khuller and U. Vishkin, Biconnectivity approximations and graph carvings, J. ACM 41
Ž .1994 , 214]235.12. M. Stoer, ‘‘Design of Survivable Networks,’’ Springer-Verlag, Berlin, 1992.13. D. Williamson, M. Goemans, M. Mihail, and V. Vazirani, A primal-dual approximation
algorithm for generalized Steiner network problems, in ‘‘Proceedings of the 25th ACMSymposium on Theory of Computing, 1993,’’ pp. 708]717.




![Deep Belief Networks are Compact Universal Approximators · Universal approximation theorem [Cybe89] Let ’() be a non constant, bounded, and monotonically-increasing continuous](https://img.pdfslide.net/doc/110x75/5f18775625025331252c43a6/deep-belief-networks-are-compact-universal-universal-approximation-theorem-cybe89.jpg)





![ON GENERALIZED BOUNDED VARIATION AND APPROXIMATION … · ON GENERALIZED BOUNDED VARIATION AND APPROXIMATION OF SDES ... Section 6], shown for functions of bounded variation, to functions](https://img.pdfslide.net/doc/110x75/5b0740317f8b9ad5548e0cdb/on-generalized-bounded-variation-and-approximation-generalized-bounded-variation.jpg)











![Proceedings - GBV · Luis B. Almeida [P1A-07] Bounded Approximation for Score Function Selection 119 Vincent Vigneron, Christian Jutten ... Carlos Puntonet [P1A-14] Geometric ICA](https://img.pdfslide.net/doc/110x75/5c06083209d3f2c40e8bc405/proceedings-luis-b-almeida-p1a-07-bounded-approximation-for-score-function.jpg)