Embed Size (px)
Citation preview

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20041
Principles of Reliable Distributed Systems
Recitation 5: Reliable Broadcasts
Spring 2005
Aran Bergman

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20042
Last on 046272
• Consistent Global State– FIFO Order– Happens before relation (Causal Order)
• Synchronous vs. Asynchronous models
• Failure Models (Processes and Links)
• Reliable Broadcast Services

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20043
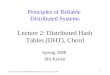
Process Failure Models (Reminder)
• The diagram is organized in terms of severity.
• The arrows present proper subsets, i.e. Crash failure model is a proper subset of Receive Omission model.– Receive Omission: A faulty
process stops prematurely, or intermittently omits to receive messages sent to it, or both.
Crash
Receive OmissionSend Omission
General Omission
Timing
Authenticated Byzantine
Byzantine
Benign
Malicious

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20044
Link Failure Models (Reminder)
• Reliable links: – every message sent is eventually delivered
• Failure types:– Crash– Loss (omission)– Timing– Byzantine

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20045
Reliable Broadcast Specifications
• Validity: if a correct process broadcasts m then all correct processes eventually deliver m
• Agreement: if a correct process delivers m then all correct processes eventually deliver m– Uniform Agreement: if any process delivers m then all
correct processes eventually deliver m
• Integrity: m is delivered by a correct process at most once, and only if it was previously broadcast

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20046
Reliable Broadcast (cont’d)
• What happens if a process fails during the broadcast of a message?

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20047
FIFO Broadcast
• If a process broadcasts a message m before it broadcasts a message m’, then no correct process delivers m’ unless it has previously delivered m.
• Alternative definition?– “all messages broadcast by the same process are
delivered to all processes in the order they are sent”
• Are these definitions equivalent?

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20048
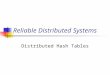
Example 1
m1
m2
m3
p (fau lty)
q (correct)
• Also, this alternative definition forces faulty processes to deliver messages. (impossible)

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 20049
Causal Broadcast
• If the broadcast of a message m causally precedes the broadcast of a message m’, then no correct process delivers m’ unless it has previously delivered m.
• Event e causally precedes event f (e→f) iff:– a process executes both e and f, in that order, or– e is the broadcast of some message m and f is the
delivery of m, or– There is an event h, such that e→h and h→f.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200410
Causal Broadcast (cont’d)
• Alternative definition?– “if the broadcast of m causally precedes the
broadcast of m’, then every correct process that delivers both messages must deliver m before m’.”
• Are these definitions equivalent?

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200411
Example 2
m1
m2
B (fau lty)
A (fau lty)
C (correct)
• In a system with failures –– A delivers a message that is only delivered by B.
– B broadcasts a response to A.
– C delivers a response to a message it never delivers.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200412
Atomic Broadcast and Uniformity
• Atomic Broadcast = Total Order
• Uniform – limit the behavior of faulty processes– Agreement, Integrity– FIFO Order, Causal Order, Total Order

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200413
Benign Failures
• Suppose processes are only subject to crash failures.– They operate correctly up to the time they crash
(by definition).
• Can we assume that the message deliveries that a process makes before crashing are always ‘correct’?

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200414
Benign Failures (cont’d)
• Even if a faulty process behaves correctly until it crashes, it may still deliver messages out-of-order before it crashes!
• Coordinator-based Atomic Broadcast algorithm:– When a process intends to broadcast a message m, it first sends m
to a coordinator.
– The coordinator delivers messages in the order in which it receives them, and periodically informs the other processes of this message delivery order.
– Other processes deliver messages according to this order.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200415
Benign Failures (cont’d)
– If the coordinator crashes, another process takes over as coordinator.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200416
Broadcast Primitives

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200417
Broadcast Algorithms
• Our model-– Asynchronous– Benign process failures– Link specifications:
• Validity: If p sends m to q, and both p and q and the link between them are correct, then q eventually receives m.
• Uniform Integrity: For any message m, q receives m at most once from p, and only if p previously sent m to q.
• Our algorithms –– Satisfy Uniform Integrity.– Not optimized.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200418
Notations
• Reliable broadcast:– broadcast(R,m), deliver(R,m)
• FIFO broadcast:– broadcast(F,m), deliver(F,m)
• Causal broadcast:– broadcast(C,m), deliver(C,m)
• Every message includes:– The sender’s ID, denoted: sender(m)– A sequence number, denoted: seq#(m)

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200419
Reliable Broadcast

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200420
Reliable Broadcast (cont’d)
• When does the algorithm provide Reliable Broadcast?
• If we assume that:– There are only receive-omission failures– Every process p (whether correct or faulty) is
connected to every correct process via a path consisting entirely of correct processes and links (with the possible exception of p itself)
• Then the algorithm satisfies Uniform Agreement.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200421
FIFO Broadcast
• We give a reduction of FIFO Broadcast to Reliable Broadcast.
• The only assumption is that we have Reliable Broadcast. We don’t need the other assumptions (apart for benign failures for Uniform Integrity).

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200422
FIFO Broadcast (cont’d)

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200423
FIFO Broadcast (cont’d)
• The given algorithm also satisfies Uniform FIFO Broadcast.
• If the Reliable Broadcast algorithm used satisfies Uniform Agreement, the algorithm also satisfies Uniform Agreement.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200424
Causal Broadcast
• Why not use LTS?– It gives us causal delivery order + total order!
• In the lecture notes you saw an implementation with Vector Clocks

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200425
Causal Broadcast (cont’d)

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200426
Causal Broadcast (cont’d)
• We give a reduction of Causal Broadcast to Uniform FIFO Broadcast.
• The algorithm satisfies Uniform Causal Order.
• If the FIFO Broadcast satisfies Uniform Agreement, the derived algorithm also satisfies Uniform Agreement.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200428
Causal Broadcast (cont’d)
• The above algorithm is a “brute force” one (and very inefficient in message length)
• Instead of sending the messages in rcntDlvrs, we can maintain a msgList (like msgSet, but maintains order) of F-delivered messages and send only message IDs.
• Each process, when F-delivering a message, should check the msgList to see if it can deliver messages according to the order of received IDs.

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200429
Causal Broadcast (cont’d)
• Since we have FIFO Broadcast, we don’t need to send all the IDs. Only the ID of the last message a process delivered from each process.
• Thus we get Vector Clocks

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200430
Causal Broadcast (Take II)

Aran Bergman, Principles of Reliable Distributed Systems, Technion EE, Spring 200431
Uniform Specifications
• Uniform Agreement: If a process (whether correct or faulty) delivers a message m, then all correct processes eventually deliver m.
• Uniform Integrity: For any message m, every process (whether correct or faulty) delivers m at most once, and only if some process broadcast m.
• Uniform FIFO Order: If a process broadcasts a message m before it broadcasts a message m’, then no process (whether correct of faulty) delivers m’ unless it has previously delivered m.
• Uniform Causal Order: If the broadcast of a message m causally precedes the broadcast of a message m’, then no process (whether correct or faulty) delivers m’ unless it has previously delivered m.
• Uniform Total Order: if any processes p and q (whether correct or faulty) both deliver messages m and m’, then p delivers m before m’ iff q delivers m before m’.